Устройство для контроля максимального отклонения ротора от оси турбомашины - SU1726786A1
Код документа: SU1726786A1
Чертежи
Описание
Изобретение относится к теплоэнергетике и может быть использовано для контроля положения ротора при пуске и эксплуатации турбомашины.
Известно устройство для контроля максимального отклонения ротора от оси Турбо- машины, содержащее первый и второй первичные преобразователи (датчики виброперемещений ), установленные вблизи ро тора в одной плоскости по двум взаимно,
перпендикулярным осям и подключенные каждый своим выходом на вход соответственно первого и второго квадраторов, соединенных с входами первого сумматора, выход которого подключен через последовательно соединенные блок извлечения корня и пиковый детектор к регистратору и пороговому блоку, вход которого соединен также с первым нормирующим блоком, а выход - с сигнализатором, и датчик метки.
соединенный с входом умножителя частоты. Выход умножителя частоты соединен с одним из входов формирователя косинусного опорного сигнала (функционального преобразователя ), другой вход которого соединен с выходом пикового детектора. Один из входов умножителя сигнала соединен с выходом блока извлечения корня, а другой его вход соединен с выходом формирователя косинусного опорного сигнала. Выходом устройства является выход умножителя сигнала .
Однако известное устройство недостаточно точно формирует сигнал максимального отклонения ротора от оси турбомашины, потому что в нем формирование (восстановление) этого сигнала осуществляется путем умножения модуля мгновенных значений вибрации (отклонения ) ротора, получаемых на выходе устройства извлечения корня, на значения единичной косинусоидальной функции, разрешение на формирование которой выдается пиковым детектором в момент достижения отклонением ротора максимального (пикового) значения, а это из-за возможного неравномерного временного интервала между пиковыми значениями приводит к несовпадению с реальным периодом виброперемещения, что и вызывает погрешность формирования сигнала и контроля отклонения ротора.
Наиболее близким к изобретению является устройство для контроля максимального отклонения ротора от оси турбомашины, содержащее первый и второй первичные преобразователи, установленные вблизи ротора в одной плоскости по двум взаимно перпендикулярным осям и подключенные каждый своим выходом на вход соответственно первого и второго квадраторов, соединенных с входом первого сумматора, выход которого подключен через последовательно соединенные блок извлечения корня и пиковый детектор к регистратору и пороговому блоку, вход которого соединен также с первым нормирующим блоком, а выход - с сигнализатором. Датчик метки соединен с входом умножителя частоты, выход которого соединен с первыми входами формирователей синусного и косинусного опорных сигналов, вторые входы которых соединены с выходом умножителя частоты, а выходы - с первыми входами умножителей сигналов, выходы которых соединены с входами второго сумматора.
Кроме того, устройство содержит два умножителя сигналов, соединенные первыми входами соответственно с первым и вторым преобразователями, а вторыми - с
выходом формирователя синусного опорного сигнала, выходы умножителей соединены с входами фильтров НЧ. Выход второго сумматора соединен с входами измерителей частоты и фазы, другие входы которых соединены с выходом формирователя синусного опорного сигнала и выходом умножителя частоты, который подключен на вход частотомера. Помимо этого, в нем умножи0 тель частоты соединен с входом функционального преобразователя, второй вход которого соединен с импульсным выходом пикового детектора, а выход - с умножителем сигнала, второй вход которого - с выхо5 дом блока извлечения корня. .
Недостатком этого устройства является тот же недостаток, что и у предыдущего, так как формирование сигнала максимального отклонения осуществляется так же. А ис0 пользование жесткой привязки к ротору по метке позволяет лишь определить амплитуду и фазу оборотной составляющей и не позволяет сформировать сигнал максимального отклонения ротора в реальном масшта5 бе времени, что необходимо для определения и контроля за величиной размаха . Это снижает достоверность вибродиагностики турбомашин.
Цель изобретения - повышение точно0 сти и достоверности контроля значений размаха виброперемещений ротора путем восстановления полного сигнала максимального виброперемещения ротора в реальном масштабе времени.
5 Поставленная цель достигается тем, что известное устройство, содержащее первый и второй первичные преобразователи, установленные вблизи ротора в одной плоскости по двум взаимно перпендикулярным
0 осям и подключенные каждый своим выходом на вход соответственно первого и второго квадраторов, соединенных с входами первого сумматора, выход которого подключен через последовательно соединенные
5 блок извлечения корня и пиковый детектор к регистратору и пороговому блоку, вход которого соединен также с первым нормирующим блоком, а выход - с сигнализатором , датчик метки соединен с входом
0 умножителя частоты и с первыми входами формирователей синусного и косинусного сигналов, вторые входы которых соединены с выходом умножителя частоты, а выходы - с первыми входами соответственно первого
5 и второго умножителей сигналов, выходы которых соединены с входами второго сумматора , снабжено вторым нормирующим блоком и преобразователем размаха виброперемещений , причем входы этого блока и / этого преобразователя подключены к выходу второго сумматора, а вторые входы умножителей сигналов соединены с выходом блока извлечения корня.
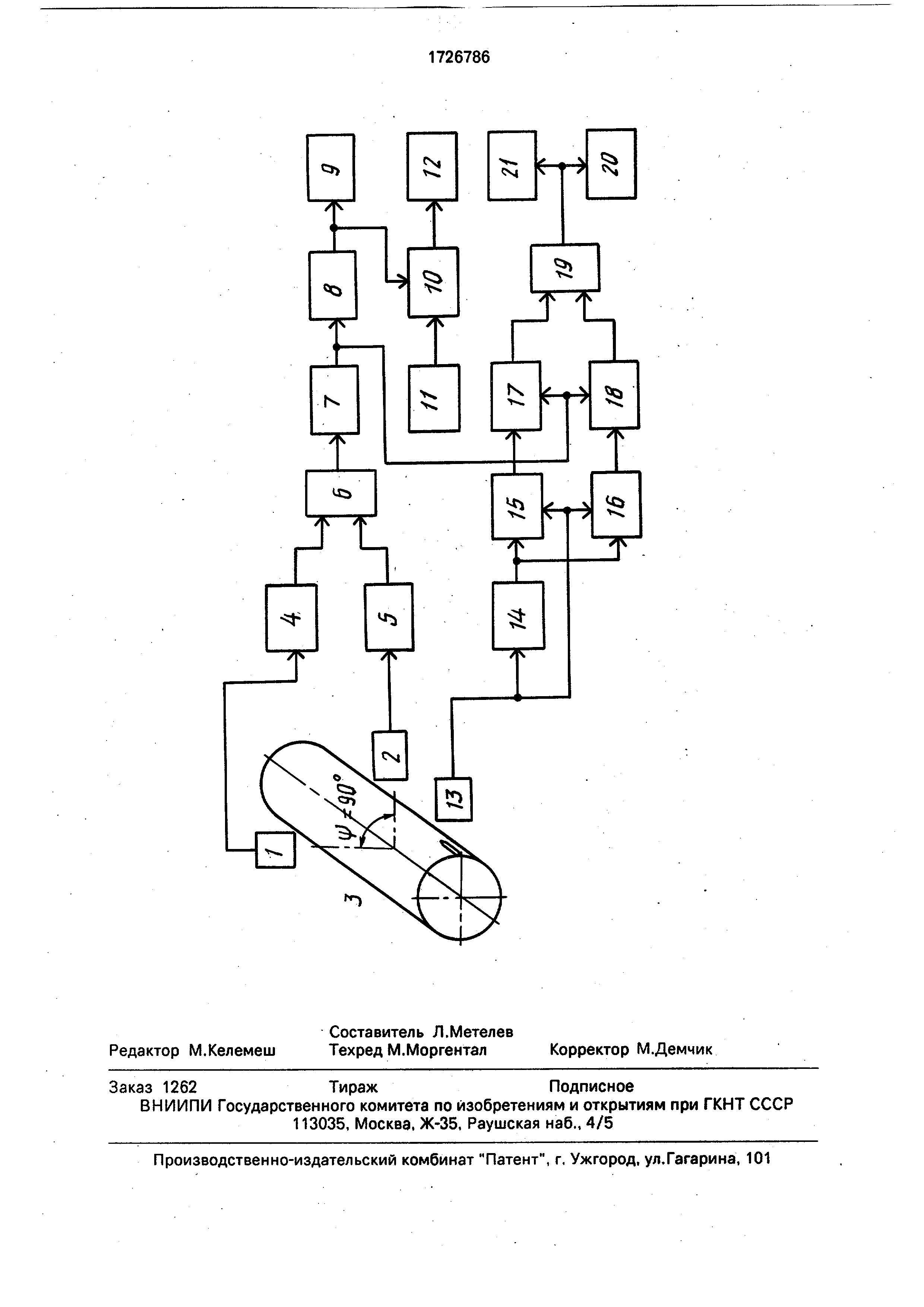
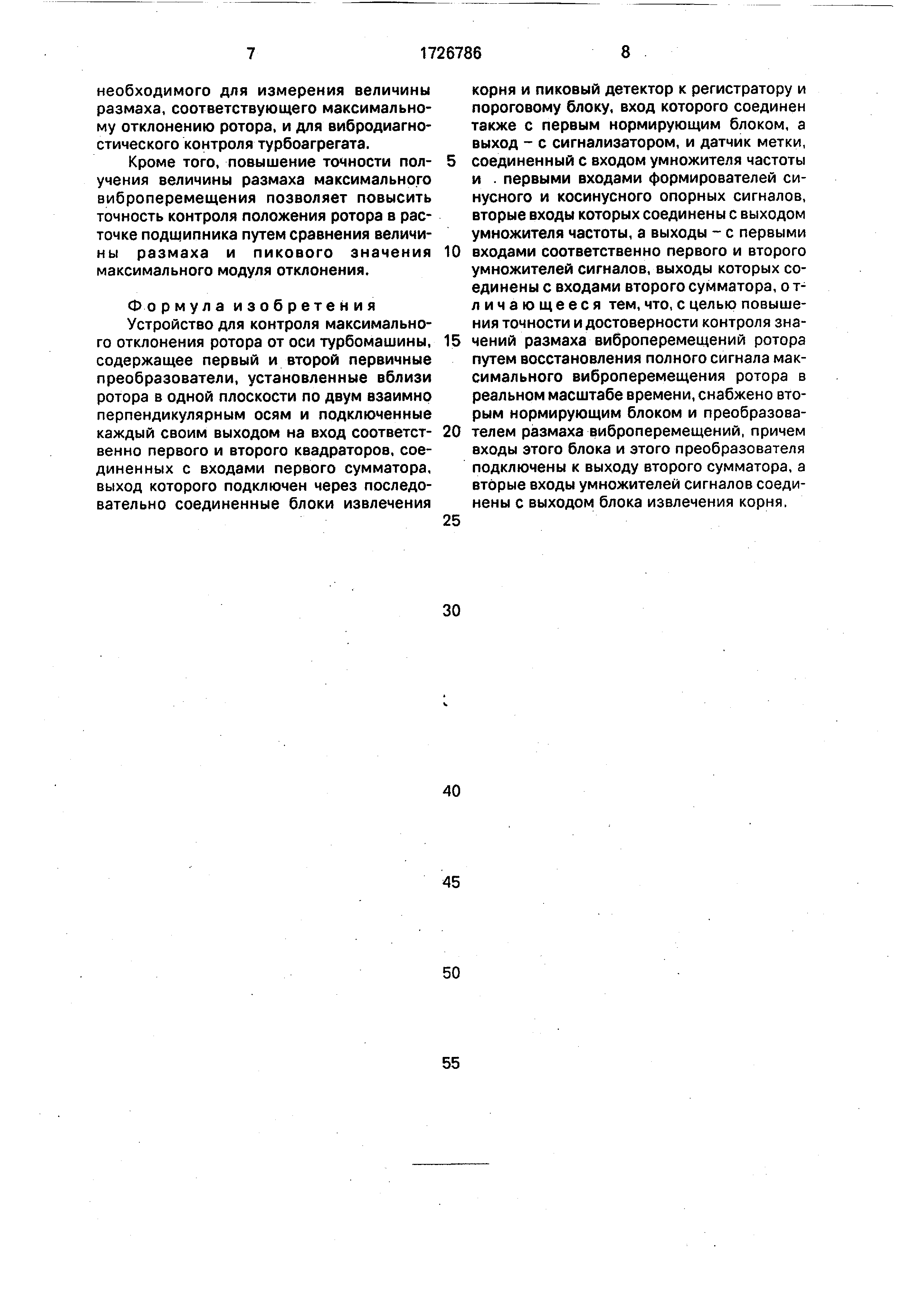
На чертеже показана структурная схема предлагаемого устройства.
Устройство содержит первый и второй первичные преобразователи 1 и 2, установленные вблизи ротора 3 в одной плоскости (радиальной) по двум взаимно перпендикулярным осям и подключенные каждый своим выходом на вход соответственно первого и второго квадраторов 4 и 5, подключенных на входы первого сумматора 6, выход которого подключен через последовательно соединенные блок 7 извлечения корня и пиковый детектор 8 к регистратору 9 и пороговому блоку 10, на другой вход которого подключен первый нормирующий блок 11, а выход порогового блока 10 подключен к сигнализатору 12, и датчик метки 13, соединенный с входом умножителя 14 частоты и первыми входами формирователя 15 синусного и формирователя 16 косинусного опор- ных сигналов, вторые входы которых соединены с выходом умножителя 14 частоты , а их выходы - с первыми входами соответственно умножителей 17 и 18 сигналов, выходы которых соединены с входами второго сумматора 19. Устройство содержит также второй нормирующий блок 20 и преобразователь 21 размаха виброперемещений , входы которых соединены с выходом второго сумматора 19. Вторые входы умножителей 17 и 18 сигналов соединены с выходом блока 7 извлечения корня.
Устройство работает, следующим образом .
От первичных преобразователей 1 и 2 сигналы, содержащие мгновенные значения составляющих виброперемещений ротора 3 в виде Sx(t) и Sy (t) , поступают на соответствующие квадраторы 4 и 5, возводятся в квадрат и поступают соответственно на первый и второй входы первого сумматора 6, выходной сигнал которого подается на блок 7 извлечения корня. Выходной сигнал блока 7 извлечения корня содержит модули Sxy(t) мгновенных значений виброперемещений Sx(t) и Sy(t) ротора 3, которые и поступают на пиковый детектор 8.
Величина максимального (пикового) модуля SSax виброперемещений ротора 3 в плоскости размещения первичных преобразователей 1 и 2 передается с выхода пикового детектора 8 на регистратор 9, может выводиться на внешнее устройство измерения и одновременно поступает в пороговый блок 10, в котором сравнивается с сигналом уставки первого нормирующего блока 11.
При превышении значением виброперемещения заданного блоком 11 уровня срабатывает сигнализатор 12, подключенный к пороговому блоку 10.
От датчика 13 метки сигнал в виде последовательности импульсов с частотой а) вращения ротора 3 поступает на умножитель 14 частоты, а также и на формирователи 15 и 16 косинусного и синусного опорных
сигналов с частотой (О вращения ротора 3 для синхронизации работы. С выхода умножителя 14 частоты последовательность импульсов более высокой частоты поступает на другие входы формирователей 15 и 16
косинусного и синусного опорных сигналов, в которых преобразуется в каждом периоде вращения ротора 3 в сигналы sin О) t и cos о) г с единичной амплитудой. Эти сигналы поступают на первые входы умножителей 17
и 18, на вторые входы которых подается сигнал мгновенных значений модуля Sxy(t) с выхода блока 7 извлечения корня. После их перемножения в умножителях 17 и 18 сигналы с их выходов подаются на входы сумматора 19. В результате суммирования этих сигналов на выходе сумматора 19 формируется переменный периодический сигнал, пропорциональный сигналу максимального отклонения ротора 3, с периодом, равным
периоду вращения ротора 3, и жестко привязанный к нему по метке. Этот сигнал пре- образуется в сигнал размаха виброперемещений преобразователем 21 размаха виброперемещений, а нормирующим блоком 20 обеспечивается на его входе нормированный сигнал переменного напряжения , пропорциональный мгновенным значениям максимального отклонения ротора 3.
Преобразователем 20 размаха виброперемещений сигнал, полученный на выходе сумматора 19, преобразуется в сигнал постоянного тока, по величине пропорциональный размаху виброперемещений
максимального отклонения-ротора 3. Этот сигнал с преобразователя 20 размаха виброперемещений может выдаваться на внешнее регистрирующее устройство (не показано).
Выполнение устройства согласно изобретению позволяет сформировать сигнал, который жестко связан с ротором и совпадает по форме и величине с сигналом максимального отклонения ротора и, тем самым,
устранится погрешность известного устройства . А это позволяет повысить точность формирования (воспроизведения) в реальном масштабе времени максимального отклонения ротора турбоагрегата,
необходимого для измерения величины размаха, соответствующего максимальному отклонению ротора, и для вибродиагностического контроля турбоагрегата.
Кроме того, повышение точности получения величины размаха максимального виброперемещения позволяет повысить точность контроля положения ротора в расточке подшипника путем сравнения величи- ны размаха и пикового значения максимального модуля отклонения.
Формула изобретения Устройство для контроля максимального отклонения ротора от оси турбомашины, содержащее первый и второй первичные преобразователи, установленные вблизи ротора в одной плоскости по двум взаимно перпендикулярным осям и подключенные каждый своим выходом на вход соответственно первого и второго квадраторов, соединенных с входами первого сумматора, выход которого подключен через последовательно соединенные блоки извлечения
0
5
0
5
корня и пиковый детектор к регистратору и пороговому блоку, вход которого соединен также с первым нормирующим блоком, а выход - с сигнализатором, и датчик метки, соединенный с входом умножителя частоты и . первыми входами формирователей синусного и косинусного опорных сигналов, вторые входы которых соединены с выходом умножителя частоты, а выходы - с первыми входами соответственно первого и второго умножителей сигналов, выходы которых соединены с входами второго сумматора, отличающееся тем, что, с целью повышения точности и достоверности контроля значений размаха виброперемещений ротора путем восстановления полного сигнала максимального виброперемещения ротора в реальном масштабе времени, снабжено вторым нормирующим блоком и преобразователем размаха виброперемещений, причем входы этого блока и этого преобразователя подключены к выходу второго сумматора, а вторые входы умножителей сигналов соединены с выходом блока извлечения корня.
TLrii
с
Реферат
Изобретение относится к теплоэнергетике и может быть использовано для контроля положения ротора при пуске и эксплуатации турбомашин. Цель изобретения - повысить точность и достоверность контроля значений размаха виброперемещений путем восстановления по мгновенным значениям модулей полного сигнала максимального виброперемещения ротора в реальном масштабе времени. Для этого в устройстве имеются два датчика вибропере2 мещений, установленные вблизи ротора в одной плоскости по двум взаимно перпендикулярным направлениям. Сигналы каждого из этих датчиков возводятся в квадрат, суммируются в первом сумматоре и после извлечения квадратного корня подаются на пиковый детектор, на выходе которого формируется сигнал максимального (пикового) значения модуля виброперемещений ротора . Чтобы померить размах виброперемещений , восстанавливают полный сигнал максимального виброперемещения ротора, для чего осуществляют умножение мгновенных значений модулей, выступающих с выхода блока извлечения корня, в умножителях сигналов на единичные синусный и косинусный опорные сигналы частоты вращения, формируемые по сигналу датчика метки, и суммирование их во втором сумматоре . Сигнал этого сумматора подается на преобразователь, в котором он преобразуется в сигнал величины размаха виброперемещений ротора, а также подается на нормирующий блок для подключения внешнего устройства обработки и регистрации информации. 1 ил. (Л С го о XI 00 о
Формула
Комментарии