Ультразвуковая визуализация волн сдвига с формированием сфокусированных пучков сканирующих линий - RU2552894C2
Код документа: RU2552894C2
Чертежи










Описание
Настоящее изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к ультразвуковым системам, которые выполняют измерения ригидности или эластичности тканей, с использованием волн сдвига.
Одной из давно существующих целей диагностической визуализации является точное определение характеристик ткани. Врачу требуется получать область диагностики органа тела и использовать систему визуализации для идентификации характеристик ткани в изображении. Теоретически, врачу необходимо, чтобы система визуализации идентифицировала патологическое изменение как злокачественное или доброкачественное. Хотя упомянутой цели еще не удалось достигнуть в полном объеме, тем не менее, диагностическая визуализация может обеспечивать клинические критерии, относящиеся к составу ткани. Одним из методов в данной области является эластография, с помощью которой измеряют эластичность или ригидность тканей в теле. Например, опухоли или образования молочной железы с высокой ригидностью могут быть злокачественными, тогда как более мягкие и более податливые образования, вероятно, должны быть доброкачественными. Поскольку известно, что ригидность образования коррелируется со злокачественностью или доброкачественностью, то эластография снабжает врача другими сведениями, поддерживающими диагностику и определение режима лечения.
Эластография, как первоначально предполагалось, оценивала ткань в теле, под воздействием давления сжатия. Когда ультразвуковой датчик плотно прижимают к телу, то нижерасположенная мягкая ткань будет сжиматься в большей степени, чем нижерасположенная плотная ткань. Но эластография может быть очень зависимой от оператора, при этом, результаты зависят от того, где и какой величины давление прикладывают к телу. Целесообразно располагать возможностью оценивать эластичность с помощью способа, не настолько зависит от оператора.
Альтернативным способом измерения эластичности является измерение волн сдвига. Когда в какой-то точке на теле нажимают и, затем, прекращают нажим, нижележащая ткань прижимается вниз, затем восстанавливается обратно, когда сжимающее усилие отпускают. Однако, поскольку ткань, испытывающая действие сжимающего усилия, постоянно соединена с окружающей тканью, то несжимаемая ткань, поперечная относительно вектора усилия, будет реагировать на перемещение вверх-вниз сжимаемой ткани. Эффект колебаний в данном поперечном направлении, называемый волной сдвига, является откликом окружающей ткани на направленное вниз сжимающее усилие. Кроме того, выяснилось, что усилие, необходимое для выталкивания ткани вниз, может быть создано давлением излучения от ультразвукового импульса, и для восприятия и измерения движения ткани под действием волн сдвига можно использовать прием ультразвука. Скорость волн сдвига определяется локальными механическими свойствами ткани. Волна сдвига будет распространяться с одной скоростью сквозь мягкую ткань и с другой, более высокой скоростью сквозь плотную ткань. Посредством измерения скорости волны сдвига в точке в теле получают информацию относительно характеристик ткани, например, о модуле упругости при сдвиге, модуле Юнга и динамической упругости при сдвиге. Поперечно распространяющаяся волна сдвига имеет небольшую скорость, обычно, несколько метров в секунду или меньше, что делает волну сдвига доступной для обнаружения, хотя данная волна быстро затухает через, самое большее, несколько сантиметров. Смотри, например, патент США 5606971 (Sarvazyan) и патент США 5810731 (Sarvazyan et al.). Поскольку одинаковый “толкающий импульс» можно повторять для каждого измерения, то метод волн сдвига допускает объективное количественное определение характеристик ткани с помощью ультразвука. Кроме того, скорость волн сдвига не зависит от интенсивности толкающего импульса, что делает измерение менее зависимым от пользователя.
В обычной эхо-импульсной ультразвуковой технологии, ультразвуковой импульс посылается из датчика, и эхо-сигналы отражаются от ткани, с которой встречается импульс, принимаются непосредственно. Однако, поскольку волны сдвига распространяются в поперечном направлении, их невозможно непосредственно принимать непосредственно из-за отсутствия поперечно расположенного акустического окна для приемника. Смотри, например, фиг. 2 в патенте Сарвазяна с соавторами (Sarvazyan et al.), где предлагается принимать волны сдвига с другой стороны ткани от излучателя, при измерении волн сдвига в молочной железе. Но приведенный метод требует отдельных излучателей и приемников, но различно расположенные акустические окна не всегда имеются в наличии. Таким образом, исследователи искали косвенные способы измерения волны сдвига. Общий способ решения упомянутой задачи состоит в получении последовательных наборов данных изображений ткани, затем, обработки данных для обнаружения распространения волны сдвига сквозь ткани, проявляющегося в результирующем движении ткани, вызванном волной сдвига. Смотри патенты Сарвазяна (Sarvazyan) и Сарвазяна с соавторами (Sarvazyan et al.), в которых описан упомянутый способ. Собранные данные эхо-сигналов, когда применяют ультразвуковую технологию в противоположность МРТ (магнитно-резонансной томографии), можно обрабатывать методами, известными в ультразвуковой технологии, для обнаружения движения, включая доплеровский метод и корреляцию данных последовательных эхо-сигналов.
Однако для получения серии наборов данных требуется время, и, как упоминалось выше, волны сдвига быстро затухают в ткани, что создает проблему различения движения с достаточными подробностями для измерения скорости распространения волны сдвига небольшой амплитуды, которая, обычно, вызывает смещение ткани меньше, чем 30 микрометров. Решение упомянутой проблемы предложено Финком с соавторами (Fink et al.) в патенте США 7,252,004, в котором предлагается наблюдать распространение волны сдвига посредством быстрого получения изображений из несфокусированных плоских волн, каждая из которых действует ультразвуком на большое пространство ткани и повторяется с частотой, по меньшей мере, 500 повторений в секунду и, предпочтительно, в диапазоне от 1000 до 5000 повторений в секунду. Вместо получения изображения посредством посылки и приема отдельных линий, данных по полю изображения, что влечет за собой полный цикл посылки-приема для каждой линии, Финк с соавторами (Fink et al.) предложили облучать ультразвуком всю область интереса (ROI) одной несфокусированной волной, затем собирать эхо-сигналы, происходящие в результате распространения волны сквозь ткань в течение последующего периода приема. (Сарвазян (Sarvazyan) использует аналогичный способ посредством параллельного соединения всех элементов своего преобразователя во время приема.) Поскольку каждый опрос области интереса (ROI) требует распространения только одной волны, то наборы данных могут последовательно собираться с высокой частотой, которая требуется согласно Финку с соавторами (Fink et al.). Хотя для несфокусированной волны характерны недостаточные отношение сигнала к шуму и разрезающая способность фокусировки линий изображения, Финку с соавторами (Fink et al.) предполагают скорректировать упомянутый недостаток высокой частотой сбора данных. Однако желательно располагать возможностью наблюдения и измерения скорости распространения волны сдвига с высокой точностью и высоким отношением сигнала к шуму, причем, с помощью обычных ультразвуковых систем.
В соответствии с принципами настоящего изобретения, предлагаются система и способ диагностической ультразвуковой визуализации, которые дают пользователю возможность собирать данные изображений с высоким разрешением, достаточным для измерения скорости волны сдвига, распространяющейся сквозь ткань. Один или более толкающих импульсов посылают в ткань с помощью ультразвукового датчика, чтобы сжимать ультразвуком ткань в направлении вектора толкающих импульсов. Немедленно после этого, датчиком посылаются и принимаются сфокусированные следящие импульсы в окрестности вектора толкающего импульса, который возбуждает волну сдвига. Выборка каждого вектора следящего импульса производится периодически, с чередованием во времени, так что движение, вызываемое волной сдвига, можно обнаруживать, когда оно происходит в позиции каждого вектора следящего импульса, предпочтительно, посредством корреляции данных эхо-сигналов от последовательных опросов вектора. По мере того, как волна сдвига двигается в поперечном направлении от вектора толкающего импульса, позиционирование следящих импульсов также можно перемещать в поперечном направлении, чтобы следовать за распространением волны сдвига. Данные от периодически производимых выборок векторов следящих импульсов обрабатываются для получения моментов времени, в которые волна сдвига вызывает максимальное смещение в каждой точке вектора следящего импульса, предпочтительно, методами кросс-корреляции, подбора аппроксимирующей кривой или интерполяции последовательных измерений смещения. Анализ моментов времени, в которые точки на соседних выборочных векторах испытывают максимальное смещение, дает результат измерения, соответствующий скорости волны сдвига в конкретных позициях векторов, при этом, изменения скорости указывают на ткани разной ригидности или эластичности. Так как волны сдвига быстро затухают, то данные о волне сдвига, обычно, невозможно собрать со всего поля изображения, с помощью единственного вектора толкающего импульса. Поэтому, процесс повторяют в другой позиции в ткани, для получения результатов измерений скорости волны сдвига в другой области ткани. Процесс повторяют, пока данные о волне сдвига не собраны по всему требуемому полю изображения. Информация относительно скорости, предпочтительно, представляется в виде двух- или трехмерного изображения ткани, цветокодированного данными о скорости волны сдвига в точках на изображении.
НА ЧЕРТЕЖАХ:
Фиг. 1 - блок-схема системы диагностической ультразвуковой визуализации, выполненной в соответствии с принципами настоящего изобретения.
Фиг. 2a-2d - изображения посылки последовательности толкающих импульсов на разные глубины для создания фронта волны сдвига.
Фиг. 3 - пространственные изображения последовательности толкающих импульсов вдоль вектора толкающего импульса, получаемого фронта волны сдвига и серии векторов следящих импульсов.
Фиг. 4 - изображение посылки и приема по 4-линейной многолинейной схеме для формирования четырех соседних векторов следящих импульсов по многолинейной схеме.
Фиг. 5 - изображение четырех поперечно соседствующих групп векторов следящих импульсов в 4-линейной многолинейной схеме.
Фиг. 6 - кривые смещения волны сдвига в двух позициях по мере того, как волна сдвига распространяется сквозь ткань.
Фиг. 7a-7c - пространственная последовательность с чередованием во времени векторов толкающих импульсов, распределенных по полю изображения.
На фиг. 1 представлена, в виде блок-схемы, ультразвуковая система, выполненная в соответствии с принципами настоящего изобретения, для измерения волн сдвига. Ультразвуковой датчик 10 содержит матрицу 12 преобразовательных элементов для посылки и приема ультразвуковых сигналов. Матрица может быть одномерной или двумерной матрицей преобразовательных элементов. Матрица каждого типа может сканировать 2-мерную плоскость, и двумерную матрицу можно применять для сканирования объемной области перед матрицей. Элементы матрицы подсоединены к формирователю 18 пучка при посылке и многолинейному формирователю 20 пучка при приеме переключателем 14 режимов приема/ посылки (T/R) 14. Координация посылки и приема формирователями пучков осуществляется под управлением контроллера 16 формирователей пучков. Многолинейный формирователь пучка при приеме создает несколько пространственно разделенных линий приема (A-линий) эхо-сигналов в течение одного интервала посылки-приема. Эхо-сигналы обрабатываются путем фильтрации, подавления шумов и т.п. в процессоре 22 обработки сигналов, затем сохраняются в памяти 24 A-линии. Отличающиеся по времени выборки A-линий, относящиеся к одной и той же позиции пространственного вектора, связываются между собой в ансамбль эхо-сигналов, относящихся к общей точке в поле изображения. Радиочастотные эхо-сигналы последовательно производимых выборок A-линий от одного пространственного вектора взаимно коррелируют в кросс-корреляторе 26 радиочастотных сигналов A-линий, чтобы сформировать последовательность выборок смещения ткани для каждой выборочной точки на векторе. В альтернативном варианте, A-линии от пространственного вектора можно обрабатывать по доплеровской частоте для обнаружения движения волны сдвига вдоль вектора, или можно воспользоваться другими фазочувствительными методами. Пиковый детектор 28 волнового фронта способен реагировать на обнаружение смещения волны сдвига вдоль вектора A-линии для обнаружения максимума смещения волны сдвига в каждой выборочной точке на A-линии. В предпочтительном варианте осуществления, данная задача выполняется подбором аппроксимирующей кривой, хотя, при желании, можно воспользоваться другими интерполяционными методами. Момент времени, в который наблюдается максимум смещения волны сдвига, отмечается в связи с моментами времени того же события в других позициях A-линии, при этом, все моменты отмечаются в общей системе отсчета времени, и полученная информация вводится в детектор 30 скорости волнового фронта, который вычисляет скорость волны сдвига дифференцированием по моментам времени максимального смещения на соседних A-линиях. Полученная информация о скорости подается в карту 32 отображения скорости, которая указывает скорость волны сдвига в разных точках пространства в 2-мерном или 3-мерном поле изображения. Карта отображения скорости вводится в процессор 34 изображений, который обрабатывает карту скорости, предпочтительно, с наложением анатомического ультразвукового изображения ткани, для отображения на устройстве 36 отображения изображений.
На фиг. 2a-2d показана посылка последовательности сфокусированных толкающих импульсов с высоким значением механического импульса (MI) (например, с MI, максимум, 1,9, чтобы не выйти за диагностические пределы FDA (Управления по контролю за продуктами и лекарствами США)) вдоль направления одного вектора, для создания фронта волны сдвига. Применяют импульсы с высоким значением MI и большой продолжительностью, чтобы посылать достаточно энергии для смещения ткани вниз вдоль вектора посылки и вызывать образование волны сдвига. Как показано на фиг. 2a, датчик 10 на поверхности 11 кожи посылает первый толкающий импульс 40 в ткань, с профилем 41a, 41b пучка на заданную глубину фокусировки, указанную заштрихованным участком 40. Данный толкающий импульс будет смещать ткань в фокусе вниз, что имеет следствием распространение фронта 42 волны сдвига в сторону от смещенной ткани.
На фиг. 2b изображен второй толкающий импульс 50, посылаемый датчиком 10 вдоль того самого вектора и сфокусированный на заштрихованном участке 50 большей глубины. Упомянутый второй толкающий импульс 50 смещает ткань на глубине фокусировки и, тем самым, вызывает распространение фронта 52 волны сдвига 52 в сторону от смещенной ткани. Таким образом, оба фронта 42 и 52 волны сдвига распространяются в поперечном направлении сквозь ткань, при этом, первоначальный фронт 42 волны предшествует второму фронту волны.
На фиг. 2c и 2d показана посылка датчиком 10 еще двух толкающих импульсов 60 и 70, при этом, каждый импульс посылается на последовательно большую глубину и создает распространяющийся в сторону фронт 62 и 72 волны сдвига. На фиг. 2d показано, что составной волновой фронт от четырех толкающих импульсов, указанный штриховыми линиями 75a и 75b, продолжается на значительную глубину в ткани, от небольшой глубины первого толкающего импульса 40 до наибольшей глубины четвертого толкающего импульса 70. Упомянутый фронт позволяет измерять волну сдвига на значительную глубину ткани. В нижеописанном исполнении, приведенный метод применяют для обнаружения распространения волны сдвига на глубину 6 см, подходящую глубину для визуализации и диагностики молочной железы.
Следует понимать, что вдоль вектора толкающего импульса можно посылать большее или меньшее число толкающих импульсов, в том числе, один толкающий импульс. Несколько толкающих импульсов могут посылаться в любом порядке, при этом, порядок определяет форму и направление составного фронта волны сдвига. Например, если толкающие импульсы, показанные на фиг. 2a-2d, посылались в последовательности от самого глубокого (70) до самого неглубокого (40), то составной фронт волны сдвига, показанный на фиг. 2d, будет иметь наклон, обратный наклону, показанному на фиг. 2d. В предпочтительном варианте осуществления, каждый толкающий импульс является длительным импульсом продолжительностью от 50 до 200 микросекунд. Например, типичная продолжительность равна 100 микросекундам. Ультразвук, формируемый в течение импульса продолжительностью 100 микросекунд, представляет собой импульсы волн сжатия и может иметь частоту, например, 7 или 8 МГц. Толкающие импульсы сильно сфокусированы, предпочтительно, с обратным относительным числом 1 или 2. В исполнении с последовательностью из четырех толкающих импульсов, показанных на фиг. 2a-2d, толкающий импульс посылается через каждые 2,5 миллисекунд, что обеспечивает посылку толкающих импульсов с частотой 400 Гц. В другом исполнении, все четыре толкающих импульса посылаются в одной последовательности для возбуждения полного фронта волны сдвига перед началом отслеживания A-линий.
На фиг. 3 показано другое применение четырех толкающих импульсов для создания составного фронта волны сдвига. Четыре толкающих импульса посылаются вдоль векторов 44, 54, 64 и 74, которые, как показано, выровнены вдоль направления одного вектора, показанного на фиг. 3. Когда сначала посылается самый неглубокий толкающий импульс вдоль вектора 44, а затем последовательно посылаются более глубокие толкающие импульсы, фронты волн сдвига от соответствующих толкающих импульсов будут распространяться, как показано волнами 46, 56, 66 и 76, к моменту времени вскоре после того, как был послан последний толкающий импульс (вектор 74). По мере того, как волны 46, 56, 66 и 76 сдвига распространяются в сторону от вектора толкающего импульса, волны опрашиваются следящими импульсами 80, показанными в виде пространственного ряда вдоль верхней стороны чертежа. Следящие импульсы могут иметь место между, а также после толкающих импульсов.
В соответствии с принципами настоящего изобретения, скорость поперечно распространяющейся волны сдвига обнаруживают измерением смещения ткани, вызываемого волной сдвига по мере того, как волна сдвига распространяется сквозь ткань. Измерение выполняется с помощью чередующихся во времени выборочных импульсов, посылаемых вблизи вектора толкающего импульса, как показано на фиг. 5. В приведенном примере, толкающий(ие) импульс(ы) 40 посылается(ются) вдоль вектора 40 толкающего импульса, чтобы возбуждать поперечно распространяющуюся волну сдвига. Выборки векторов A-линий, соседних с вектором 40 толкающего импульса, производятся выборочными импульсами T1, T2, T3, T4 и T5, посылаемыми вдоль каждого вектора в последовательности с чередованием во времени. Например, производится выборка в позиции A1 первого вектора первым импульсом T1, затем в позиции A2 второго вектора следующим импульсом T2, затем A3, A4 и A5. Затем снова производится выборка в позиции A1 вектора, и последовательность повторяется. Поскольку выборки производятся с чередованием во времени, то, в приведенном примере, выборка в каждой из пяти позиций векторов производится один раз через каждые пять выборочных импульсов. В приведенном примере, импульс в каждую позицию вектора посылается пятьдесят пять раз в течение общего времени слежения 27,5 мс. Каждый импульс дает, в результате, эхо-сигналы, возвращающиеся вдоль вектора, которые оцифровываются быстродействующим аналого-цифровым (A/D) преобразователем. Таким образом, для каждой выборочной точки вдоль каждого вектора существует ансамбль из 55 выборок, при этом, каждая выборка снимается с частотой одна пятая от частоты импульсов последовательности T1-T5 выборочных импульсов. Частота отсчетов будет выбираться с учетом частотного состава обнаруживаемого смещения волны сдвига, чтобы соответствовать критерию Найквиста на взятие выборок. Поскольку целью взятия выборок является определение и отслеживание эффекта смещения волны сдвига по мере того, как упомянутая волна распространяется сквозь ткань, то позиции векторов можно располагать ближе друг к другу для медленно распространяющихся волн сдвига и дальше друг от друга для быстрее распространяющихся волн сдвига. Можно также использовать другие последовательности взятия выборок векторов с чередованием во времени. Например, выборки нечетных векторов можно производить в последовательности, за которой следует взятие выборок четных векторов. В другом примере, можно с чередованием во времени производить выборки в позициях A1-A3 векторов, затем в позициях A2-A4 векторов, затем в позициях A3-A5 векторов, чтобы отслеживать смещение волны сдвига, по мере ее распространения. Исходя из потребностей ситуации, можно также использовать другие последовательности. Затем, ансамбли чередующихся во времени выборок в каждой точке, вдоль каждого выборочного вектора обрабатываются для вычисления момента времени максимального смещения ткани в каждой точке каждого вектора, как подробно поясняется ниже.
В соответствии с дополнительным аспектом настоящего изобретения, многолинейную посылку и прием используют так, что один следящий импульс может одновременно производить выборки из множества соседних, тесно расположенных позиций A-линий. На фиг. 4 представлен предпочтительный метод многолинейной посылки и приема. Как показано на фиг. 4, один импульс отслеживания A-линий, с профилем 82a, 82b пучка, который облучает ультразвуком несколько позиций сканирующих линий при приеме, посылается так, как указано широкой стрелкой A#. В предпочтительном варианте, следящий импульс является, так называемым, «широким импульсом», описанным, например, в патенте США 4644795 (Augustine). В приведенном примере, ультразвуком облучают четыре позиции A1-1, A1-2, A1-3 и A1-4 сканирующих линий при приеме. Эхо-сигналы от четырех сканирующих линий при приеме (4-линейная схема) принимаются в ответ на один излученный импульс и соответственно обрабатываются и суммируются для формирования когерентных эхо-сигналов вдоль каждой из сканирующих линий при приеме. Формирователи пучков, способные формировать несколько упомянутых одновременных линий, описаны, например, в патентах США 5318033 (Savord), 5345426 (Lipschutz), 5469851 (Lipschutz) и 6695783 (Henderson et al.). Упомянутые многолинейные формирователи пучков, обычно, применяются для уменьшения времени сбора данных и, тем самым, для повышения частоты кадров динамических ультразвуковых изображений, которые особенно полезны для визуализации бьющегося сердца и кровотока при проведении эхокардиографии в реальном времени. Упомянутые формирователи пучков пригодны также при 3-мерной ультразвуковой визуализации для того, чтобы можно было обеспечивать частоту кадров отображения в реальном времени. По данному вопросу смотри патент США 6494838 (Cooley et al.). В исполнении настоящего изобретения, многолинейный сбор данных дает двойное преимущество: допускает высокоплотное расположение выборочных линий и быстрый сбор данных о волне сдвига короткой продолжительности, которая распространяется только на небольшое расстояние сквозь ткань перед рассеянием вследствие затухания. Несмотря на возможность применения многолинейности более высокого порядка, при которой выборки собирают вдоль большего числа A-линий одновременно и, следовательно, с более высокой частотой выборок, такой подход потребует более широкого пучка (A#) посылки для одновременного направления ультразвука вдоль большего числа сканирующих линий при приеме. В результате, более широкий пучок посылки будет снижать отношение сигнала к шуму в исполнении более высокого порядка.
На фиг. 5 поясняется использование 4-линейного приема для посылки и приема вдоль каждого выборочного вектора A1-A5. Первый следящий импульс T1 посылают вблизи вектора 44 толкающего импульса для облучения ультразвуком четырех позиций от A1-1 до A1-4, и, в ответ, принимается четыре A-линии многолинейной схемы из прилегающей поперечной области A1. Когда четыре линии многолинейной схемы центрированы относительно посылаемого следящего импульса, то эхосигналы принимаются вдоль двух A-линий с каждой стороны от центра в центре пучка следящего импульса, как указано позициями A1-1 и A1-2 слева от центра и A1-3 и A1-4 справа от центра. В предпочтительном варианте, A-линии расположены с интервалами 0,5 мм друг от друга. Волны сдвига, обычно, перемещаются со скоростью 1-10 метров в секунду, и, следовательно, следящие импульсы периодически посылаются в области A1-A5 с чередованием во времени, и выборки A-линий принимаются из позиций A-линий в течение временных интервалов между толкающими импульсами (когда упомянутые интервалы существуют), и в течение 20 мс после последнего толкающего импульса, после чего волна сдвига выходит из односантиметрового окна A1-A5 стробирования. Поскольку волны сдвига могут содержать частотные составляющие в диапазоне от приблизительно 100 Гц до приблизительно 1000 Гц, то, согласно теории дискретизации, каждая A-линия должна иметь частоту выборок 2 кГц. Приведенная частота дает, в результате, набор (ансамбль) из пятидесяти пяти выборок A-линии каждой выборочной точки на каждой A-линии многолинейной схемы.
В примере, показанном на фиг. 5, пять следящих импульсов T1-T5 посылаются в последовательных окнах A1-A5 стробирования, прилегающих к вектору 44 толкающему импульсу, для взятия выборок эффекта смещения волны сдвига по мере того, как распространяется волна. Типичный выборочный импульс является коротким импульсом, обычно, одно- или двухпериодным, с частотой, подходящей для прохождения внутрь на исследуемую глубину, например, 7-8 МГц. Каждый следящий импульс смещен на 2 мм от соседних с ним импульсов, что дает, в результате, двадцать A-линий, разделенных интервалом 0,5 мм, в 4-линейной многолинейной схеме на суммарном расстоянии один сантиметр. Существуют различные способы опроса окон стробирования. Один способ состоит в отборе выборок только из области A1, пока обнаруживается волна сдвига, затем, в начале отбора выборок в области A2, затем в области A3 и т.д. Другой способ состоит в чередовании во времени взятия выборок, как описано выше, взятии выборок с помощью следящих импульсов T1-T5 в последовательности, затем, в повторении последовательности. При использовании последнего способа, пять окон стробирования с двадцатью позициями следящих A-линий могут одновременно отслеживать эффект волны сдвига. После того, как волна сдвига проходит через ближайшее окно A1 стробирования, затем, через соседние окна, отбор выборок из упомянутого окна можно прекратить, и время взятия выборок можно отдать остальным окнам стробирования, через которые еще распространяется волна сдвига. Взятие выборок продолжается, пока волна сдвига не распространится за пределы одного см., области взятия выборок, при этом, к данному моменту времени волна сдвига, обычно, затухает ниже определимого уровня. В среднем, волны сдвига имеют время ослабления 10 мс.
Моменты времени выборок в позициях следящих A-линий должны быть привязаны к общей оси времени, когда следящие импульсы чередуются во времени так, что результаты можно использовать для выполнения непрерывного измерения времени и, следовательно, скорости на протяжении односантиметровой области взятия выборок. Например, поскольку выборочные импульсы для окна A2 стробирования не посылаются, пока не проходит 50 микросекунд после соответствующих выборочных импульсов для окна A1, то между моментами времени выборок из двух соседних окон существует 50-микросекундное смещение по времени. Упомянутую разновременность следует учитывать при сравнении моментов времени максимального смещения в соответствующих окнах, причем учитывать с накоплением по всему односантиметровому окну стробирования. Привязка моментов времени выборок каждого выборочного вектора к общей системе отсчета времени может решить проблему смещенных моментов времени выборок.
Следует понимать, что волна сдвига распространяется радиально в сторону от вектора, в позиции которого толкающий импульс сместил ткань. Упомянутое распространение означает, что волну сдвига можно отслеживать с каждой стороны от вектора толкающего импульса в плоскости 2-мерного изображения, проходящей через ткань. В примере, приведенном на фиг. 5, показано, что волну сдвига отслеживают вправо от вектора 44 толкающего импульса, хотя, волну сдвига можно также отслеживать по мере того, как она распространяется влево от вектора. Волну сдвига можно также отслеживать одновременно с обеих сторон от вектора толкающего импульса с помощью чередующихся во времени следящих импульсов с обеих сторон от вектора толкающего импульса, но в отсутствие возможности взятия выборок по всей сантиметровой области с обеих сторон от толкающего импульса, без потери плотности выборочных линий, частоты взятия выборок сканирующих линий (PRF (частоты следования импульсов)), расстояния отслеживания волны сдвига или некоторого их сочетания.
Поскольку область интереса (ROI) для диагностики, обычно, больше, чем один сантиметр в ширину, то процедуру, показанная на фиг.5, повторяют с толкающими импульсами, посылаемыми в отличающихся поперечных позициях по полю изображения. Тем самым, поле изображения опрашивается в областях шириной один см, и результаты для областей отображаются с прилеганием один к другому для представления изображения всей области интереса (ROI). В предпочтительном исполнении применен датчик L12-5 компании Philips Healthcare, который имеет апертуру 5 см. Поле изображения шириной четыре см опрашивают в четырех соседних или частично совмещенных областях шириной один см, которые, затем, отображаются бок о бок или с полным или частичным наложением на устройстве отображения.
На фиг. 6 показана последовательность значений смещения для двух соседних в поперечном направлении точек на двух соседних A-линиях, например, A1-3 и A1-4, на фиг. 5. Кривая 100 представляет смещение во времени, вызванное проходом волны сдвига через точку на A-линии A1-3, и кривая 120 представляет смещение в соседней точке A-линии A1-4. Точки 102-118 значений смещения ткани вычисляют посредством локальных взаимных корреляций данных радиочастотных сигналов (например, 10-30 выборок радиочастотных сигналов по глубине), собранных с течением времени, приблизительно, на глубине выборочной точки на A1-3, чтобы вывести значения локальных смещений с течением времени в точке на глубине. Точки 102-118 значений смещения, обнаруженного в последовательные моменты времени (по y-оси), при графическом нанесении в виде функции времени, соединяют для формирования первой кривой 100 смещения. В точке на второй A-линии A1-4, отнесенной вправо от точки на первой A-линии, последовательность 122-136 значений смещения, сформированных посредством локальной взаимной корреляцией, можно соединить для формирования второй кривой 120 смещения. Поскольку, в приведенном примере, волна сдвига распространяется слева направо, то вторая кривая 120 для крайней правой A-линии сдвинута вправо (по времени) от первой кривой 100 смещения. Точную привязку по времени прохода фронта волны из одной точки в следующую точку измеряют по обнаруженному максимуму или точке перегиба каждой кривой смещения, обозначенных позициями 200 и 220 в приведенном примере. Для нахождения максимума кривой можно применить различные методы. В предпочтительном варианте осуществления, значения смещения каждой кривой обрабатывают посредством подбора аппроксимирующих кривых по значениям, чтобы сформировать полные кривые 100, 120 смещения и максимумы кривых. Другой метод состоит в интерполяции дополнительных точек между обнаруженными точками для поиска максимума. Еще один метод состоит в определении наклонов кривой с каждой стороны от максимума и определении максимума по пересечению наклонных линий. Еще один подход заключается во взаимной корреляции данных кривой. Когда максимумы смещения волны сдвига в последовательных позициях А-линий обнаруживаются пиковым детектором 28 волнового фронта, то отмечаются моменты времени проявления относительно обнаружения точек на кривых. Затем, разность упомянутых моментов времени, Δt, с учетом смещений моментов времени выборок, и интервалы между А-линиями (например, 0,5 мм) могут быть использованы детектором 30 скорости волнового фронта для определения скорости волны сдвига в то время, когда волна сдвига проходила между двумя позициями А-линий. После того, как вся область интереса (ROI) опрошена вышеописанным способом, и кривые смещения и моменты времени проявления максимумов определены для каждой выборочной точки на каждом векторе Α-линии, скорость распространения волны сдвига может быть вычислена от точки к точке по всей области интереса. Упомянутая двумерная матрица значений скоростей кодирует цветом или кодирует иным способом отображаемое изменение, чтобы формировать карту отображения скоростей. Карта отображения скоростей представляется на устройстве отображения 36, предпочтительно, с наложением изображения В-режима области интереса и с пространственным совмещением с упомянутым изображением.
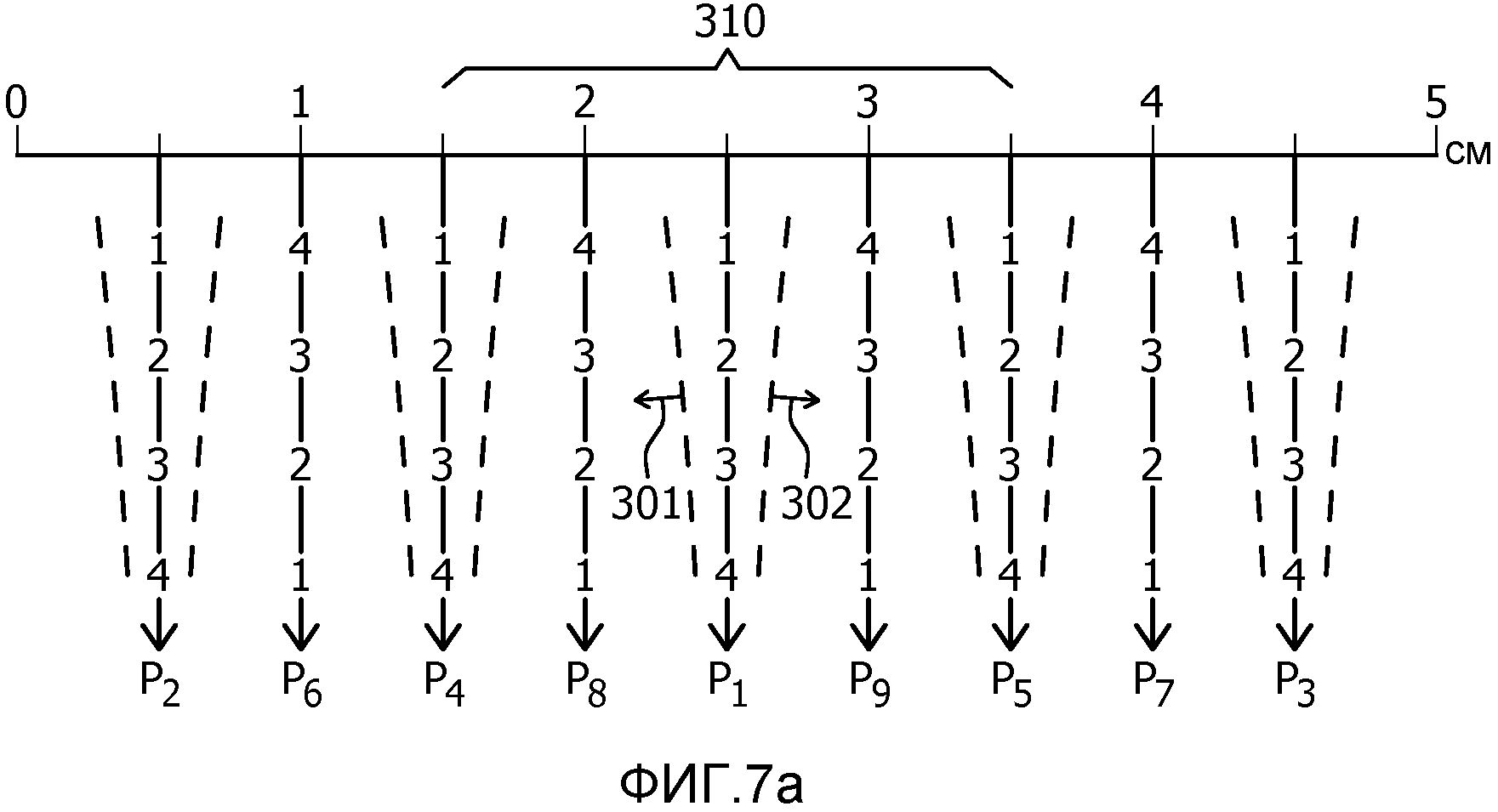
В вышеописанном примере, волны сдвига обнаруживались и измерялись по мере того, как они распространялись горизонтально через область интереса. Однако, многие патологические изменения имеют круглую форму или иначе проявляются в виде двумерных объектов на 2-мерном изображении. Для точного определения местоположения границы круглого патологического изменения было бы желательно, теоретически, направлять волны сдвига на патологическое изменение с направлений в пределах полных 360° вокруг патологического изменения. Направление волн сдвига вдоль одного набора направленных траекторий и сочетание результатов с измерениями, снятыми с волн сдвига, распространяющихся по другим направленным траекториям через область интереса (ROI), может сформировать более точные и надежные изображения патологических изменений и их границ. Один способ решения данной задачи состоит в обеспечении флуктуаций векторов и последовательностей толкающих импульсов по полю изображения, как показано на фиг. 7a-7c. На данных фигурах показана серия толкающих импульсов в фиксированной области интереса шириной 5 см. Толкающие импульсы следуют в разных последовательностях, чередуются в пространстве и создаются с флуктуациями в пространстве для опроса области интереса с разнонаправленными волнами сдвига. Кроме того, временное и пространственное чередование снижает накопление энергии в любой конкретной точке в поле изображения, которое может превосходить требуемые тепловые пределы в теле. Сканирование, показанное на фиг. 7a, начинается с вектора P1 толкающего импульса в центре поля изображения (точка 2,5 см), с четырех толкающих импульсов 1-4, которые следуют от небольшой глубины до значительной глубины в поле изображения. Как изложено выше, данные четыре толкающих импульса будут создавать составной фронт волны сдвига, который наклонен для распространения в направлении немного вниз, как показано стрелками 301 и 302. Толкающий импульс вдоль вектора P2 посылается с левой стороны поля изображения (точка 0,5 см), на значительном удалении влево от предыдущего толкающего импульса. Так как последовательные вектора толкающих импульсов не соседствуют друг с другом, а широко разнесены в пространстве, то тепловые эффекты двух векторов толкающих импульсов разнесены настолько, что не могут накапливаться в какой-то одной точке. Аналогичным образом, третий вектор P3 толкающего импульса расположен далеко справа в поле изображения (точка 4,5 см), следующий вектор P4 толкающего импульса находится слева от центра поля (точка 1,5 см), и т.д. Девять векторов толкающих импульсов, посылаемых вышеописанным способом с пространственным разнесением, показаны на фиг. 7a.
Видно также, что последовательность импульсов векторов изменяется. Вектора P1-P5 используют последовательность толкающих импульсов, начинающуюся с самой малой глубины и заканчивающуюся на максимальной глубине (1-4), тогда как вектора Ρ6-Ρ9 используют последовательность от большой до малой глубины (4-1). Описанный подход приводит к чередованию в последовательности толкающих импульсов, от вектора к вектору по полю изображения.
Последовательность импульсов, представленная на фиг. 7b, следует за последовательностью импульсов на фиг. 7a и начинается с вектора P1 толкающего импульса с левой стороны поля изображения (точка 0,5 см). Упомянутый вектор толкающего импульса значительно удален от предыдущего вектора, который был вектором P9, находившимся справа от центра поля изображения на фиг. 7a. На фиг. 7b показано также, что вектор P1 характеризуется последовательностью импульсов, обратной пространственно соответствующему ему вектору P2 на фиг. 7a. Последовательность вектора P2 на фиг. 7b составлена от большой до малой глубины, а последовательность вектора P2 на фиг. 7a была составлена от малой до большой глубины. Данная схема приводит к распространению волн сдвига от вектора P1 на фиг. 7b немного вверх (смотри стрелки 304 и 306), тогда как волны сдвига от вектора P2 на фиг. 7a распространялись немного вниз (смотри стрелки 301 и 302). Кроме того, вектор P1 на фиг. 7b сдвинут немного влево от точки 0,5 см поля изображения, тогда как вектор P2 на фиг. 7a (и все остальные вектора на фиг. 7a) совмещен с точкой 0,5 см поля. Упомянутый сдвиг выполнен по полю изображения, в чем можно убедиться путем сравнения совмещения пяти векторов под скобкой 310, которые совмещены с сантиметровыми отметками, с пятью векторами под скобкой 312, которые, все вместе, изображены сдвинутыми влево от сантиметровых отметок. Сочетание упомянутых разностей дополнительно уменьшает накопление энергии в конкретной точке в изображении, а также, как видно на фигуре, направляет волны сдвига на фиг. 7a вдоль траекторий распространения, отличающихся от траекторий на фиг. 7b, Как упоминалось выше, вектора последовательно посылаемых толкающих импульсов расположены с широким разнесением, и порядок следования толкающих импульсов чередуется от вектора к вектору по полю изображения. При желании, точки фокусировки толкающих импульсов также можно изменять от вектора к вектору.
Продолжение приведенной последовательности изменения посылки показано на фиг. 7c. В приведенной последовательности девяти векторов толкающих импульсов заметно, что вектора толкающих импульсов сдвинуты вправо от сантиметровых отметок, что можно видеть путем сравнения векторов под скобкой 314 с векторами под скобками 310 и 312. При использовании вышеописанных комбинаций последовательностей и пространственного сдвига и разнесения импульсов, эффекты нагревания можно минимизировать, и измерения скорости от различно направленных волн сдвига можно объединять путем усреднения или подобным образом для обеспечения более надежного количественного определения эластичности.
Реферат
Группа изобретений относится к системам и способам диагностической ультразвуковой визуализации. Система содержит матричный датчик, передающий толкающий импульс вдоль предварительно заданного вектора для создания волны сдвига и импульсы слежения вдоль линий слежения, соседних с вектором толкающего импульса, и принимающий эхо-сигналы из точек вдоль линий слежения. Система также содержит память А-линий для сохранения данных эхо-сигналов линии слежения, детектор движения, реагирующий на данные линии слежения, для обнаружения движения в результате волны сдвига, проходящей через позиции линии слежения, детектор скорости, который измеряет скорость волн сдвига, проходящих через позиции линии слежения. Устройство отображения отображает результаты измерения волн сдвига. Система дополнительно содержит многолинейный формирователь пучка, соединенный с матричным датчиком, который управляет матричным датчиком для повторной передачи в последовательности с чередованием во времени сфокусированных импульсов слежения вдоль линий слежения с профилем пучка, который облучает ультразвуком множество соседних линий слежения, и, в ответ на передачу импульсов слежения, для одновременного приема эхо-сигналов вдоль множества соседних линий слежения для воспроизведения когерентных эхо-сигналов вдоль каждой из множества соседних линий слежения. Использование изобретения обеспечивает быстрый сбор данных о волне сдвига короткой продолжительности. 2 н. и 11 з.п. ф-лы, 7 ил.
Формула
ультразвуковой матричный датчик (10), который передает толкающий импульс вдоль предварительно заданного вектора для создания волны сдвига, передает импульсы слежения вдоль линий слежения, соседних с вектором толкающего импульса, и принимает эхо-сигналы из точек вдоль линий слежения;
память (24) А-линий для сохранения данных эхо-сигналов линии слежения;
детектор движения, реагирующий на данные линии слежения, для обнаружения движения в результате волны сдвига, проходящей через позиции линии слежения;
детектор (30) скорости, который измеряет скорость волн сдвига, проходящих через позиции линии слежения;
устройство отображения (36) для отображения результатов измерения волн сдвига;
причем система отличается тем, что дополнительно содержит:
многолинейный формирователь пучка (20, 18), соединенный с матричным датчиком, который управляет матричным датчиком для повторной передачи в последовательности с чередованием во времени сфокусированных импульсов слежения (80) вдоль линий слежения с профилем пучка, который облучает ультразвуком множество соседних линий слежения, и, в ответ на передачу импульсов слежения, для одновременного приема эхо-сигналов вдоль множества соседних линий слежения для воспроизведения когерентных эхо-сигналов вдоль каждой из множества соседних линий слежения.
передают толкающий импульс вдоль вектора толкающего импульса;
передают множество импульсов слежения;
принимают эхо-сигналы в ответ на передачу сигналов слежения;
обрабатывают эхо-сигналы для определения значений скорости волны сдвига во множестве точек в двух или трех направлениях в области интереса; и
отображают двух- или трехмерное изображение значений скорости волны сдвига,
причем способ отличается тем, что
импульсы слежения сфокусированы и передаются вдоль множества линий слежения, соседних с вектором толкающего импульса, причем импульсы слежения имеют профиль пучка, который облучает ультразвуком множество соседних линий слежения, причем импульсы слежения передаются вдоль каждой линии слежения множество раз с чередованием во времени, и
отличается тем, что
принятые эхо-сигналы являются сфокусированными эхо-сигналами, принятыми одновременно от множества линий слежения, облученных ультразвуком в ответ на передачу импульса слежения.
Комментарии