Ультразвуковые системы для сбора данных во многих плоскостях с одно- и двухплоскостной визуализацией в реальном времени и способы их работы - RU2689175C2
Код документа: RU2689175C2
Чертежи



Описание
Точное и раннее определение ответа на противоопухолевую терапию желательно для эффективного лечения злокачественных опухолей и для оценивания новых терапевтических соединений для онкологических больных. Гистологическое определение средней внутриопухолевой микрососудистой плотности (МСП) представляет собой чаще всего используемый способ оценивания развития кровеносных сосудов. Однако способы, основанные на микрососудистой плотности, не обеспечивают точного оценивания функционального состояния сосудов опухоли, поскольку многие плохо функционирующие или коллапсированные сосуды имеют эндотелиальные клетки, которые окрашивают и подсчитывают и берут за основу в инвазивных технологиях, чтобы получать образцы ткани для диагностики.: Поэтому определение изменений микрососудистой плотности может неточно отражать эффективность антиангиогенной терапии. В течение многих лет стандартным способом оценивания ответа опухоли на лечение было измерение размера опухоли с использованием способов визуализации с помощью осевой компьютерной томографии (КТ) или магнитной резонансной томографии (МРТ) и в соответствии с руководством «Критерии оценки ответа при солидной опухоли» (RECIST) и/или руководством Всемирной организации здравоохранения (ВОЗ). Однако может потребоваться от нескольких недель до месяцев для заметного изменения морфологии опухоли, поэтому для получения диагностической информации на основании изменения размера опухоли может потребоваться от нескольких недель до месяцев. Такая задержка является нежелательной и часто встречающейся при использовании основанных на анализе изображений способов диагностики для оценивания противоопухолевой терапии.
Вновь вводимые в применение биологические противоопухолевые соединения, такие как антиангиогенные средства, могут вызывать увеличение опухоли перед сокращением или могут стабилизировать рост опухоли, что позволяет пациентам находиться в симбиозе с злокачественной опухолью. Однако в таких случаях диагностика, основанная на критериях размера опухоли (например, изменения размера опухоли с течением времени), может не работать. Поэтому ясно, что необходимо иметь новые визуализирующие биологические маркеры для оценивания ответа опухоли. Такой новый визуализирующий биологический маркер можно использовать для раннего оценивания, является ли конкретная лечебная схема надлежащей или эффективной после начала лечения, и это будет иметь значение как для ведения пациента, так и для разработки лекарственных средств, для поддержки решений «годен-негоден» и ускорения, например, клинических испытаний. Большая часть методик противоопухолевой терапии, имеющихся в настоящее время, не действует немедленно, не приводит к полному отмиранию, и/или может не очень сильно влиять на характеристики ткани (по сравнению с удалением). Поэтому неэффективно обнаруживать альтерацию опухоли современными способами визуализации, если размер опухоли не изменяется. Поэтому количественное определение активности опухоли с помощью кровотока или с помощью метаболизма представляет собой привлекательный способ оценивания ответа на терапию, такую как антиангиогенная терапия.
Например, способ, известный как ультразвуковая эхография с контрастированием (УЭК), представляет собой один из трех (наряду с позитронной эмиссионной томографией с использованием фтордезоксиглюкозы (ФДГ-ПЭТ) и магнитной резонансной томографии с динамическим контрастированием (ДК-МРТ)) передовых функциональных способов визуализации, который можно использовать для оценивания ответа опухоли на антиангиогенную терапию или аналогичную. Однако обычные способы ультразвуковой эхографии с контрастированием могут быть неточными и трудными для выполнения. Имеется необходимость в усовершенствованных системах и способах, которые обеспечивают более точные измерения и более простую последовательность действий при получении изображений.
Системой (системами), устройством (устройствами), способом (способами), компоновкой (компоновками), пользовательским интерфейсом (интерфейсами), компьютерной программой (программами), процессами и т.д. (каждый из которых в дальнейшем будет относиться к системе, если контекст не означает иное), описанными в этой заявке, решаются проблемы систем из предшествующего уровня техники.
В соответствии с вариантами осуществления предложенной системы раскрыта ультразвуковая система визуализации, предназначенная для визуализации области интереса человека. Система может включать в себя контроллер, который выполнен с возможностью определения количества N из множества плоскостей изображения для сканирования на протяжении области интереса, получения эхоинформации, соответствующей каждой из плоскостей изображения в множестве плоскостей изображения, образования изобразительной информации для каждой из плоскостей изображения на основании получаемой эхоинформации, сохранения изобразительной информации, соответствующей каждой из плоскостей изображения, в запоминающем устройстве системы; и рендеринга в реальном времени на дисплее ультразвукового изображения, содержащего область интереса, при этом ультразвуковое изображение рендерируется на основании образованной изобразительной информации для одной выбранной плоскости изображения из множества плоскостей изображения или би-плоскости, которая ортогональна к множеству плоскостей изображения.
Кроме того, контроллер может выполнять рендеринг в реальном времени на дисплее линий или других знаков, или символов, которые накладываются на ультразвуковое изображение или располагаются сверху и/или снизу ультразвукового изображения, рендерированного на основании образованной изобразительной информации, при этом линии или другие знаки, или символы показывают множество плоскостей изображения, сканируемых на протяжении области интереса.
В дополнение к этому контроллер также может выполнять рендеринг другого ультразвукового изображения на дисплее в реальном времени на основании изобразительной информации из одной из множества плоскостей изображения, и при этом выбранная линия, соответствующая одной выбранной плоскости изображения отображается иным образом, чем остальные линии на дисплее, и при этом выбранная линия соответствует плоскости изображения, которая находится под углом (например, ортогональна) к множеству плоскостей изображения.
Кроме того, предполагается, что сохраняемая изобразительная информация может включать в себя изобразительную информацию, соответствующую выбранной одной плоскости изображения, которая рендерируется в реальном времени, и изобразительную информацию, соответствующую плоскостям изображения, которые не отображаются в реальном времени, из множества плоскостей изображения. Кроме того, предполагается, что контроллер может выполнять построение кривой время-интенсивность, которая представляет накопление контрастного вещества, на основании изобразительной информации, соответствующей плоскостям изображения, которые не рендерируются в реальном времени, и выбранной одной плоскости изображения, которая рендерируется в реальном времени. Кроме того, контроллер может определять параметры, включающие в себя один или несколько из максимальной интенсивности, площади под кривой, времени нарастания и среднего времени прохождения, на основании построенной кривой время-интенсивность. Кроме того, предполагается, что количество плоскостей изображения, рендерируемых в реальном времени, не зависит от N. Кроме того, N может быть в пределах 2
В соответствии с вариантами осуществления предложенной системы раскрыты способ отображения ультразвуковых изображений и компьютерная программа, сохраняемая на нетранзиторном машиночитаемом носителе данных, при этом компьютерная программа и способ обеспечивают выполнение этапов и функций для ультразвуковой системы.
Настоящее изобретение поясняется более подробно в нижеследующих примерах вариантов осуществления и с обращением к чертежам, на которых идентичные или подобные элементы частично показаны одинаковыми позициями, а признаки из различных примеров вариантов осуществления могут сочетаться. На чертежах:
фиг. 1 - блок-схема последовательности действий способа обработки, выполняемого в соответствии с вариантами осуществления предложенной системы;
фиг. 2 - участок экранного снимка кадра изображения в реальном времени (КИРВ), включающего графическое представление изобразительной информации для одной выбранной плоскости сканирования (ВПС), в соответствии с вариантами осуществления предложенной системы;
фиг. 3 - участок экранного снимка кадра изображения в реальном времени, включающего графическое представление изобразительной информации из выбранной плоскости сканирования и графическое представление изобразительной информации из ортогональной плоскости сканирования, в соответствии с вариантами осуществления предложенной системы;
фиг. 4 - участок экранного снимка графического пользовательского интерфейса (GUI), включающего кадр изображения в реальном времени, в соответствии с вариантами осуществления предложенной системы; и
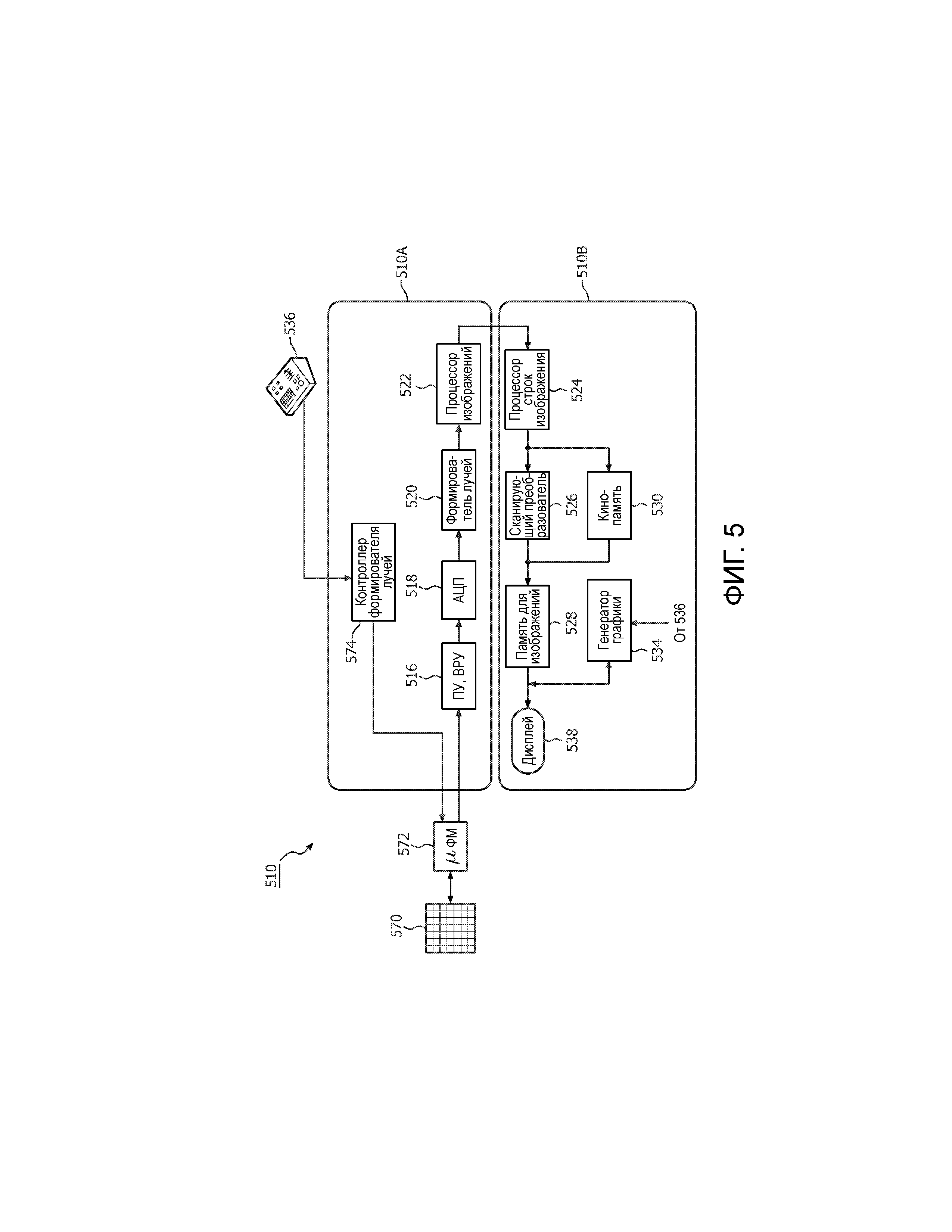
фиг. 5 - структурная схема ультразвуковой диагностической томографической системы, выполненной в соответствии с принципами настоящего изобретения.
Нижеследующее представляет собой описание иллюстративных вариантов осуществления, которое при использовании в сочетании с нижеследующими чертежами показывает отмеченные выше признаки и преимущества, а также дополнительные признаки и преимущества. В нижеследующем описании для пояснения, а не для ограничения, изложены иллюстративные подробности, такие как архитектура, интерфейсы, технологии, атрибуты элементов и т.д. Однако специалистам в данной области техники должно быть понятно, что другие варианты осуществления, которые отклоняются от этих подробностей, все же будут подразумеваться находящимися в объеме прилагаемой формулы изобретения. Кроме того, для ясности подробное описание хорошо известных устройств, схем, инструментов, технологий и способов опускается, чтобы не затруднять понимание описания представленной системы. Следует однозначно понимать, что чертежи включены для иллюстрации и ими не представляется полный объем настоящего изобретения. На различных сопровождающих чертежах одинаковыми позициями могут быть обозначены подобные элементы.
В соответствии с вариантами осуществления представленной системы раскрывается ультразвуковая система (например, работающая в реальном времени двумерная (2D) и трехмерная (3D) ультразвуковая система с контрастированием (УСК)), которая может выполнять автономный количественный анализ получаемой изобразительной информации. В некоторых вариантах осуществления ультразвуковые изображения из многочисленных плоскостей или срезов сканирования могут быть получены в реальном времени, сохранены и после этого использованы для количественного анализа. В одном варианте осуществления количественное определение кровотока в опухоли и фракционного объема крови в опухоли может быть выполнено при автономном использовании, например, кино-петель полученных ультразвуковых изображений, когда данные в пределах объема опухоли могут быть собраны и использованы для количественного определения. В такой ситуации пользователь (например, оператор, такой как специалист по ультразвуковой эхографии, доктор и т.д.) может управлять ультразвуковой системой визуализации, чтобы сканировать множество плоскостей изображения в объекте интереса, таком как опухоль, чтобы получать изобразительную информацию для каждой из плоскостей изображения, чтобы создавать множество ультразвуковых изображений объекта интереса. В некоторых вариантах осуществления объединенные данные в виде изображения для каждой из множества плоскостей изображения могут образовывать объем изображений или двумерные ультразвуковые изображения объекта интереса (например, опухоли), которые могут использоваться при различных количественных анализах. Например, изобразительная информация из одной или нескольких плоскостей изображения, которая образует объем изображений, может сохраняться в запоминающем устройстве системы для последующего использования, такого как постобработка. В таком случае во время постобработки пользователь может расположить область интереса (ОИ) в объеме изображений для количественного определения и Дополнительного анализа.
Как будет описано в дальнейшем в этой заявке, к множеству плоскостей изображения могут быть отнесены N плоскостей изображения или N' плоскостей изображения. N плоскостей изображения находятся под углом к N' плоскостям изображения, например под углом 30°, 45°, 90° или другим заданным углом. В некоторых вариантах осуществления N (или N') плоскостей изображения могут быть образованы взаимно параллельными или под любым углом относительно друг друга (например, под углом 90° или ортогональными). В некоторых вариантах осуществления двумерный матричный преобразователь может создавать N плоскостей изображения, которые развернуты веером под заданным углом относительно друг друга. В некоторых вариантах осуществления N плоскостей изображения ортогональны к по меньшей мере одной из N' плоскостей изображения. Наборы плоскостей, которые образованы под углом относительно друг друга, могут быть разнесены для захвата данных в пределах около 90-110°. При использовании двумерного матричного преобразователя в некоторых вариантах осуществления N плоскостей изображения могут соответствовать азимутальным плоскостям изображения и N' плоскостей изображения могут соответствовать угломестным плоскостям изображения или наоборот. Множество плоскостей изображения может включать в себя N или N' плоскостей изображения, где N или N' является целым числом больше 2. В некоторых вариантах осуществления множество из N плоскостей изображения может быть получено и сохранено наряду с только одной из N' плоскостей изображения, то есть во время операции сканирования отображается и/или сохраняется двухплоскостное изображение.
В соответствии с некоторыми вариантами осуществления каждая из множества плоскостей изображения (например, срезов изображения) может иметь задаваемую пользователем или по умолчанию толщину (например, толщину среза). Кроме того, пользователь может управлять местоположением и/или ориентацией одной или нескольких из множества плоскостей изображения. Например, N (или N') из множества плоскостей изображения могут быть взаимно параллельными или могут находиться под углом друг к другу. Кроме того, можно задавать плотность или расстояние между плоскостями изображения. В некоторых вариантах осуществления одна из N' плоскостей изображения, ортогональная к множеству из N плоскостей изображения, также может сканироваться и рендерироваться для отображения. В некоторых вариантах осуществления оба набора из множества N плоскостей изображения и множества N' плоскостей изображения используются для образования ультразвуковых изображений. Например, первый набор включает в себя множество из N плоскостей изображения, а второй набор включает в себя N' плоскостей изображения, которые ортогональны к плоскостям из первого набора. В некоторых вариантах осуществления первый набор из множества N плоскостей изображения развертывается веером в пространстве и второй набор из N' плоскостей изображения находится под углом (например, ортогонален) к N плоскостям изображения.
В соответствии с другими вариантами осуществления во время процесса получения данных одна плоскость изображения из множества плоскостей изображения (например, N плоскостей изображения) отображается в реальном времени в системе визуализации. В некоторых вариантах осуществления би-плоскость (например, ортогональная плоскость изображения), ортогональная к множеству плоскостей изображения (например, к N плоскостям изображения), отображается в реальном времени в системе визуализации. Однако изобразительная информация для каждой из множества N плоскостей изображения получается и сохраняется в запоминающем устройстве системы для последующего использования, например, для автономной постобработки и/или для выбора и отображения одной из N плоскостей изображения или одной из N' плоскостей изображения, находящейся под углом (например, ортогональной) к N плоскостям изображения.
Что касается постобработки, то автономная постобработка для, например, ультразвуковой эхографии с контрастированием может быть выполнена для определения таких параметров, как максимальная интенсивность, площадь под кривой время-интенсивность, а также других параметров, таких как время нарастания и среднее время прохождения и другие производные параметры, которые коррелируют с кровотоком в опухоли и фракционным объемом крови в опухоли и поэтому представляют накопление контрастного вещества опухолью. При использовании такого протокола изобразительную информацию из каждой плоскости изображения (например, из каждого среза изображения или плоскости сканирования), из множества сканируемых плоскостей изображения можно использовать для снижения или же минимизации погрешностей, вызванных небольшими изменениями местоположения плоскости изображения и/или регулировками положения области интереса. Этим можно значительно снижать неточность кривой время-интенсивность и следовательно, производных параметров, которые считаются коррелированными с кровотоком в опухоли и фракционным объемом крови в опухоли, возникающую в результате изменений положений плоскости изображения и/или регулировок положения области интереса.
Кроме того, поскольку опухоли никогда не бывают однородными, в результате определения количественной информации, которая может быть получена из множества сканируемых плоскостей изображения опухоли, согласно вариантам осуществления представленной системы можно определять суммарное количество кровеносных сосудов в опухоли с большей точностью, чем можно определять на основании одной сканируемой плоскости изображения. Кроме того, согласно вариантам осуществления представленной системы можно определять баланс между пространственным и временным контрастом и определять множество из N плоскостей сканирования на основании этого баланса, при этом общая точность может превосходить точность полностью трехмерного сканирования, при котором может иметься ограниченный временной контраст.
На фиг. 1 показана блок-схема последовательности действий, которой иллюстрируется способ 100 обработки, выполняемой в соответствии с вариантами осуществления представленной системы. Согласно способу можно осуществлять получение многочисленных срезов в реальном времени. Способ 100 можно выполнять при использовании одного или нескольких компьютеров, имеющих связь по сети, и можно получать информацию из одного или нескольких запоминающих устройств и/или сохранять информацию в них, при этом запоминающие устройства могут быть локальными и/или удаленными друг от друга. Способ 100 может включать в себя одно или несколько из указанных ниже действий, осуществляемых процессором или другим устройством, выполненным с возможностью-осуществления указанных ниже действий. В некоторых вариантах осуществления действия способа 100 могут выполняться с использованием ультразвуковой системы визуализации, включающей в себя процессор, работающий в соответствии с вариантами осуществления представленной системы. Кроме того, если это желательно, в зависимости от установочных параметров одно или несколько из этих действий можно объединять и/или разделять на поддействия или одно или несколько из этих действий пропускать. При выполнении действий способ можно начинать с действия 101 и затем переходить к действию 105. Следует отметить, что способ из фиг. 1 является одним примером варианта осуществления способов, представленных в настоящем раскрытии. Этапы способа, описываемые в дальнейшем в этой заявке, могут выполняться, например, не последовательно и в любом желаемом порядке, обеспечивающем положительный результат процедуры визуализации. Например, плоскости изображения, которые должны отображаться, можно изменять при получении и отображении данных в виде изображения. Кроме того, во время визуализации количество получаемых N плоскостей изображения можно изменять в реальном времени. Кроме того, во время визуализации сохраняемые плоскости изображения можно изменять и модифицировать. Например, один набор плоскостей или петлю наборов плоскостей изображения можно выбирать во время процедуры визуализации или до использования предварительных установок в системе.
При переходе к действию 105 способ может включать в себя определение количества плоскостей изображения, подлежащих сканированию в качестве множества плоскостей изображения. При дальнейшем рассмотрении будут описываться N плоскостей изображения, но описание также можно применять к N' плоскостям изображения. Значение количества используемых плоскостей изображения обозначено через N, где N является целым числом, которое может быть больше двух. Значение N может выбираться пользователем системы и определяет количество плоскостей изображения (например, множество развернутых веером плоскостей изображения), регистрируемых при получении многосрезового изображения анатомического объекта интереса, такого как опухоль. N плоскостей изображения могут находиться под углом друг к другу (например, могут быть развернуты веером) и могут пересекать обнаруживаемый объект интереса. N плоскостей изображения, которые находятся под углом друг к другу, могут быть расположены с интервалом, характерным для секторного изображения, которое обычно отображается при ультразвуковой визуализации в В-режиме. Кроме того, N плоскостей могут находиться на одинаковых расстояниях или разных расстояниях друг от друга.
В некоторых вариантах осуществления количество N плоскостей изображения, используемых при выполнении процедуры сканирования, может подчиняться следующему уравнению:
2
где N3D является типичным количеством плоскостей, получаемых при трехмерной визуализации в реальном времени. Соответственно, время сканирования при использовании представленной системы меньше, чем времена сканирования, используемые при типичной трехмерной визуализации. В некоторых вариантах осуществления значение N может быть задано от около 5 до около 10 и N3D может быть от 32 до 160 кадров. Однако количество N или N' плоскостей изображения может без труда задаваться пользователем или предусматриваться, например, в заданной или конфигурации по умолчанию для определенной процедуры. Например, в некоторых вариантах осуществления количество N может непосредственно вводиться пользователем в зависимости от желаемого применения. Соответственно, способ может включать в себя использование пользовательского интерфейса (UI), такого как меню или кнопки ввода, которые могут быть физическими кнопками или программными кнопками, отображаемыми на дисплее с сенсорным управлением (например, поворотными ручками или другими переключателями, такими как ползунковые переключатели, стрелками вверх-вниз, списком меню для выбора и т.д.), с которыми пользователь может взаимодействовать, чтобы вводить или же выбирать значение N. В некоторых вариантах осуществления могут использоваться физические кнопки и ручки, связанные с традиционными ультразвуковыми передвижными системами.
В некоторых вариантах осуществления значение N может быть определено на основании, например, заданного временного или пространственного разрешения объема изображений. Поэтому, например, когда пользователь повышает временное разрешение, N может быть снижено. В других вариантах осуществления значение N по умолчанию может быть получено из запоминающего устройства системы. Например, N может иметь по умолчанию значение 8. Кроме того, в дальнейших вариантах осуществления значение N может быть задано в соответствии с предпочтениями пользователей, получаемыми из запоминающего устройства системы. Соответственно, в способе можно идентифицировать текущего пользователя и получать из запоминающего устройства системы пользовательские установочные параметры, соответствующие идентифицированному пользователю. Таким образом, для первого пользователя в способе может быть задано значение N=7, тогда как для второго пользователя в способе может быть задано значение N=9. Однако N также может быть четным числом.
В дальнейших вариантах осуществления предполагается, что значение N может быть определено в соответствии с параметрами пациента, такими как возраст пациента, рост, вес и т.д. В дальнейших вариантах осуществления значение N может быть определено на основании отличий размера ткани, визуализируемой при данном сканировании (например, сканировании сердца, сканировании печени, сканировании желчного пузыря, сканировании поджелудочной железы, сканировании почек, общем сканировании кишечного тракта и т.д., и/или сочетаний их). В случае более крупных тканевых структур N может быть больше.
Кроме того, в дальнейших вариантах осуществления способ может включать в себя определение, имеется ли информация о предшествующем сканировании (например, предшествующем сканировании текущего пациента и которая включает в себя значение N). Соответственно, если определяется, что информация о предшествующем сканировании имеется, в системе может использоваться то же самое значение N, которое использовалось v при предшествующем сканировании (если N доступно). Этим можно обеспечить согласование N плоскостей сканирования при текущем и предшествующем сканированиях для одного и того же пациента. Однако, если определяется, что информация о предшествующем сканировании отсутствует, в системе можно использовать значение N по умолчанию (например, 5). Кроме того, если определяется, что N из информации о предшествующем сканировании равно 1 (например, была получена только одна плоскость сканирования), в способе можно задавать для N значение по умолчанию, например 5.
В дальнейших вариантах осуществления N может быть определено на основании просмотровой таблицы. Например, параметры могут сохраняться в запоминающем устройстве системы в любой подходящей форме, такой как таблица параметров сканирования. Соответственно, способ может включать в себя использование таблицы параметров сканирования для определения значения N в соответствии с данными таблицы параметров сканирования. Таблица параметров сканирования может задаваться и/или сбрасываться системой и/или пользователем. В соответствии с этим способ может включать в себя обеспечение пользователя пользовательским интерфейсом, с которым пользователь может взаимодействовать для задания и/или сброса параметров в таблице параметров сканирования, если это желательно.
Как описывалось в этой заявке, одна плоскость изображения из множества плоскостей изображения (например, N плоскостей изображения) может быть рендерирована в реальном времени на дисплее системы визуализации, тогда как би-плоскость (например, ортогональная плоскость изображения из множества плоскостей изображения (например, N' плоскостей изображения)) также может быть в реальном времени рендерирована на дисплее. Что касается обозначений в этой заявке, то выбранной плоскостью сканирования (ВПС) (выбранной плоскостью изображения) именуется одна выбранная плоскость изображения, которая отображается из числа множества получаемых плоскостей изображения. Кроме того, под выбранной плоскостью сканирования (ВПС) могут пониматься две выбранные (например, ортогональные) плоскости изображения, которые отображаются. Например, выбранная одна из N плоскостей изображения и соответствующая одна из N' плоскостей изображения могут быть отображены в реальном времени. Хотя последующее описание будет по большей части относиться к получению и сохранению N плоскостей изображения и отображению одной выбранной плоскости, оно в равной степени применимо к вариантам осуществления, в которых N, N' плоскостей изображения получают и сохраняют (например, когда N плоскостей изображения ортогональны к N' плоскостям изображения) и только две плоскости изображения из получаемых и сохраняемых N, N' плоскостей изображения фактически отображают.
Как будет дополнительно описано ниже с обращением к действиям 117 и 119, неотображаемые плоскости сканирования относятся к плоскостям сканирования, которые не должны отображаться и необязательно могут включаться в некоторые варианты осуществления, если это желательно. Например, что касается визуализации представляющей интерес ткани (например, опухоли или органа), то во время визуализации шесть плоскостей изображения (N=6) могут пересекать представляющую интерес ткань.
Во время сканирования будет отображаться плоскость 4 сканирования. Плоскостями сканирования, которые не подлежат отображению (например, неотображаемыми плоскостями сканирования), являются плоскости 1, 2, 3, 5 и 6 сканирования. Может быть использован любой подходящий формат. В некоторых вариантах осуществления значения для N, выбранных плоскостей сканирования и неотображаемых плоскостей сканирования могут задаваться в соответствии с пользовательскими установочными параметрами. После завершения действия 105 в способе можно перейти к действию 109.
Во время действия 109 способ может включать в себя получение эхоинформации из N плоскостей изображения, которые пересекают объект интереса (например, опухоль пациента в представленном примере). Или же во время действия 109 получают N плоскостей изображения, которые пересекаются под углом (например, прямым) с N' плоскостями изображения. В соответствии с этим способ может включать в себя управление ультразвуковым датчиком, включающим в себя матричный преобразователь (например, двумерный матричный преобразователь), предназначенный для излучения ультразвуковых импульсов, которые пересекают N плоскостей объекта интереса, и для получения в ответ эхоинформации для каждой из N плоскостей. Более конкретно, способ может включать в себя управление датчиком (датчиками) для получения эхоинформации, соответствующей получению в реальном времени N плоскостей сканирования.
Во время действия 109 способ может также включать в себя получение эхоинформации для по меньшей мере одной из N' плоскостей изображения (например, би-плоскости), которая находится под углом (например, является ортогональной) к группе из N плоскостей изображения. Если определяют, что будут сканироваться только N плоскостей изображения, то в способе вовсе не получают N' плоскостей изображения. Если определяют, что должно быть получено двухплоскостное изображение, способ может включать в себя получение по меньшей мере одной из N' плоскостей изображения и поэтому может включать в себя получение эхоинформации для по меньшей мере одной из N' плоскостей изображения. После завершения действия 109 в способе можно перейти к действию 113.
Во время действия 113 способ может включать в себя образование изобразительной информации для каждой из N плоскостей изображения на основании полученной эхоинформации, принятой для каждой из N плоскостей изображения, соответственно. Способ может включать в себя образование изобразительной информации с использованием любых подходящих технологий, общеизвестных в данной области техники. В одном варианте осуществления способ может включать в себя получение и образование многокадровых данных с использованием вычислительной среды Live-islice™. Изобразительную информацию для каждой из N плоскостей сканирования можно также использовать для образования объемных данных. Кроме того, согласно способу можно образовывать изобразительную информацию для по меньшей мере одной из N' плоскостей изображения на основании получаемой эхоинформации для одной из N' плоскостей сканирования. После завершения действия 113 в способе можно перейти к действию 117.
Во время действия 117 способ может включать в себя выбор изображений для отображения в реальном времени в течение операции сканирования. В некоторых вариантах осуществления одну плоскость изображения из N плоскостей изображения выбирают и отображают. В некоторых вариантах осуществления отображают би-плоскость изображения, которая находится под углом (например, ортогональна) к N плоскостям изображения, и если получают множество из N' плоскостей изображения, то одну из N' плоскостей изображения выбирают для отображения. N-ное изображение или двухплоскостное изображение (например, N'-ное изображение), выбираемое для отображения, может быть отображено для пользователя в подходящем формате, например, в виде квадратного, прямоугольного или секторного изображении. N-ное изображение или двухплоскостное изображение (например, N'-ное изображение) может быть выбрано в соответствии со способом и/или пользователем. Например, путем выбора установочных параметров по умолчанию, при которых выбранное N-ное или N'-ное изображение может быть получено из запоминающего устройства и/или от пользователя. В соответствии с этим способ может включать в себя обеспечение пользователя пользовательским интерфейсом, с которым пользователь может взаимодействовать (например, с помощью кнопки, меню и т.д.), чтобы выбирать изображение для отображения (например, по желанию, до или во время сканирования).
В некоторых вариантах осуществления в способе может использоваться исключение при выборе N-ного изображения и/или N'-ного изображения для отображения. Например, отображаемое изображение может быть выбрано из числа получаемых и сохраняемых N или N' плоскостей изображений. Другие остающиеся плоскости изображения из N или N' плоскостей изображения, которые не отображаются, относятся к неотображаемым плоскостям сканирования. В предположении, что N=6, а срезами, которые не должны отображаться (например, неотображаемыми плоскостями сканирования), являются срезы 1, 2, 3, 5 и 6, в одном варианте осуществления способа можно определить, что отображаемой плоскостью изображения является четвертый срез. Поэтому в некоторых вариантах осуществления сначала определяют неотображаемые плоскости сканирования и после этого может быть определена плоскость изображения для отображения. В других вариантах осуществления N-ное изображение или N'-ное изображение для отображения может быть определено на основании идентификатора пользователя. Соответственно, в этих вариантах осуществления способа можно идентифицировать пользователя, получать пользовательские установочные параметры из запоминающего устройства системы и после этого задавать N плоскостей изображения или N' плоскостей изображения в соответствии с пользовательскими установочными параметрами. После завершения действия 117 в способе можно перейти к действию 119. Кроме того, отметим, что действия 117 и 119 способа можно выполнять в ином порядке. Например, действие 117 и/или 119 можно выполнять после действия 105, когда определено количество срезов или плоскостей изображения, подлежащих получению.
Во время действия 119 способа можно выбрать неотображаемые плоскости сканирования. Неотображаемые плоскости сканирования могут включать в себя (N-1) из N плоскостей изображения или (N'-1) из N' плоскостей изображения, получаемых во время сканирования. Неотображаемые плоскости сканирования представляют собой плоскости изображения, которые сохраняются, но не отображаются в реальном времени (например, неотображаемые срезы). Неотображаемые плоскости сканирования могут быть выбраны с использованием любого подходящего средства, например, выбраны из запоминающего устройства системы и/или из вводимой пользователем информации. Кроме того, предполагается, что неотображаемые плоскости сканирования также могут быть заданы в соответствии с видом сканируемой ткани (например, сканированием печени, сканированием сердца и т.д.). В дальнейших вариантах осуществления после определения значения N и отображаемой плоскости изображения можно определить неотображаемые плоскости сканирования путем использования процесса исключения. Таким образом, если определяется, что N=7 и отображаемой плоскостью изображения является четвертая, то согласно способу можно определить, что неотображаемыми плоскостями сканирования являются 1, 2, 3, 5, 6 и 7. Подобный процесс применяют для выбора из числа N' плоскостей изображения тех плоскостей, которые ортогональны к N плоскостям изображения. В одном варианте осуществления выбирают одно двухплоскостное изображение, но другие из N' плоскостей изображения также могут быть выбраны и отображены.
Ссылаясь на N плоскостей или срезов изображения, предполагается, что в соответствии с некоторыми вариантами осуществления местоположение, разнесение, толщина, глубина и/или ориентация неотображаемых плоскостей сканирования могут быть определены в соответствии со способом и/или пользователем. Если другие значения, установочные параметры и/или параметры являются необходимыми, в некоторых вариантах осуществления способ может включать в себя получение соответствующих значений по умолчанию из запоминающего устройства системы. После завершения действия 119 в способе можно перейти к действию 121.
Во время действия 121 способ может включать в себя формирование кадра изображения в реальном времени (КИРВ) для рендеринга на дисплее системы. Все образуемые ультразвуковые изображения объекта интереса, которые должны отображаться в реальном времени, например, из выбранной плоскости сканирования и, например, из плоскости изображения, ортогональной к выбранной плоскости сканирования, загружают в кадр изображения в реальном времени. Однако плоскости изображения, которые не должны отображаться, такие как неотображаемые плоскости сканирования, не загружают в кадр изображения в реальном времени.
Во время действия 123 способ может включать в себя определение, что только N плоскостей изображения должны быть получены во время визуализации. На фиг. 1 это обозначено как двумерное (2D) сканирование. Если определяется, что только N плоскостей изображения должны быть получены, в способе можно перейти к действию 137. Однако, если определяется, что по меньшей мере одна из N' плоскостей изображения должна отображаться и/или получаться, то в процессе можно перейти к действию 133, при этом в кадре изображения в реальном времени будет отображаться по меньшей мере одна из N' плоскостей изображения, такая как одна из N' плоскостей изображения, которая ортогональна к N плоскостям изображения при двумерном сканировании. Система и/или пользователь может выбирать, будут ли сохраняться и/или отображаться N и/или N' плоскостей изображения. Например, в некоторых вариантах осуществления способа пользователю может предоставляться пользовательский интерфейс (например, кнопки, меню), через который он взаимодействует с системой для выбора плоскостей изображения, которые должны сохраняться и/или отображаться. Это задание параметров может быть выполнено в любой момент времени, например во время начального задания параметров способа. В зависимости от вида выполняемого сканирования (например, при ультразвуковой эхографии с контрастированием печени и т.д.) в способе можно выбирать конфигурацию по умолчанию или предпочтения пользователей относительно сохранения и/или отображения N и/или N' плоскостей изображения.
Кадр изображения в реальном времени может включать в себя непрерывные или дискретные области (область) и может иметь форму и/или размер, которые могут выбираться системой (например, по умолчанию, в соответствии с видом исследования, в соответствии с параметрами исследования и т.д.) или пользователем. Таким образом, кадр изображения в реальном времени может наполняться изобразительной информацией для выбранной одной из N плоскостей изображения (например, включающей в себя область интереса, -если это желательно) и изобразительной информацией для одной из N' плоскостей изображения (например, ортогональной одной из N' плоскостей изображения), и любой связанной информацией, такой как измерения, оси, местоположения срезов, подсвечивание и т.д. В некоторых вариантах осуществления кадр изображения в реальном времени может включать в себя «пустую» информацию. Например, на фиг. 2 показан участок экранного снимка кадра 200 изображения в реальном времени, включающего в себя ультразвуковое изображение 202, которое соответствует одной из N плоскостей изображения (например, срезу в пределах области интереса, если это желательно), при этом в соответствии с вариантами осуществления предложенной системы изображение 202 включает в себя изобразительную информацию области интереса, например опухоли 14. Кроме того, кадр 200 изображения в реальном времени может включать в себя ультразвуковое изображение 204, соответствующее одной из N' плоскостей изображения, которая находится под углом (например, ортогональна) к одной из N плоскостей изображения, соответствующей ультразвуковому изображению 202. Линия 204а может быть наложена поверх ультразвукового изображения 202 одной из N плоскостей изображения для идентификации относительного места, на котором расположено ультразвуковое изображение 204 би-плоскости. Другие линии 206а, 206b, 206с и 206d могут быть наложены и отображены для показа, где другие из N' плоскостей изображения визуализируются и сохраняются, но не отображаются. На фиг. 2 поверх изображения показаны сплошная и пунктирные линии, но другие индикаторы могут использоваться для показа пользователю, какие линии отображаются и какие только сохраняются. Например, противоположные символы ∧ и ∨, звездочки или другие пиктограммы могут быть расположены на наружном краю изображения и показаны, например, в различных цветах. Кроме того, линии и другие метки поверх изображения могут быть исключены из отображения для обеспечения лучшего просмотра изображения. В общем случае этой информацией пользователю показывается количество N получаемых плоскостей и местоположения их относительно друг друга. Конечно, поскольку N плоскостей изображения ортогональны к N' плоскостям изображения, ультразвуковое изображение 202 может соответствовать одной из N' плоскостей изображения и ультразвуковое изображение 204 может соответствовать ортогональной одной из N плоскостей изображения. Аналогично этому, линии 204а и 206a-206d могут соответствовать N плоскостям изображения. Согласно способу ультразвуковое изображение 202 может быть образовано при использовании любой подходящей технологии визуализации, известной в данной области техники, и может быть отображено в модифицированной операционной среде islice™, функционирующей в соответствии с вариантами осуществления предложенной системы. Кроме того, показанное на фиг. 2 расстояние ds обозначает угловое расстояние между соседними плоскостями изображения из N или N' плоскостей изображения. В некоторых вариантах осуществления плоскости изображения могут быть параллельными, при этом ds может быть выражено в единицах миллиметров. Угловое расстояние ds между плоскостями изображения может одинаковым (например, N плоскостей изображения могут находиться на одинаковом расстоянии друг от друга). Однако в дальнейших вариантах осуществления плоскости изображения могут быть разнесены на разные расстояния, которые могут задаваться системой и/или пользователем. N и ds могут быть (обратно) пропорциональными. Например, увеличение N может приводить к уменьшению ds и наоборот. После завершения действия 121 в способе можно перейти к действию 123.
Как показано на фиг. 3, в некоторых вариантах осуществления действие 133 может включать в себя наполнение кадра 300 изображения в реальном времени изобразительной информацией как для ультразвукового изображения 304, соответствующего одной из N плоскостей изображения, так и для ультразвукового изображения 304', соответствующего одной из N' плоскостей изображения. Кроме того, согласно способу можно определять местоположение каждой из N плоскостей изображения и показывать их линиями 306a-306d. Линии 306'а-306'd соответствуют N' плоскостям изображения, которые ортогональны к N плоскостям изображения. Проекции линий 304, 304', 306а-d и 306'а-d могут быть показаны в кадре 200 изображения в реальном времени в направлении, которое ориентировано ортогонально от поверхности двумерного матричного преобразователя, такого Х-матричный преобразователь. Этот вид может давать пользователю представление о том, каким образом плоскости изображения ориентированы относительно азимутальной и угломестной характеристик датчика. На фиг. 3 кадр 300 изображения в реальном времени включает в себя отображение одной 304 из N плоскостей изображения и ортогональной одной 304' из N' плоскостей изображения. Как показано, изображения отображаются в прямоугольном формате, но секторообразный формат изображений, показанный - на фиг. 2, также может использоваться. Сплошными линиями 304 и 304' показана отображаемая плоскость изображения, а пунктирными линиями (например, 306'а) показаны неотображаемые плоскости сканирования.
После завершения действия 133 в способе можно перейти к действию 137. В некоторых вариантах осуществления способа кадр изображения в реальном времени можно согласовывать с информацией в заданном формате, отображаемой в нем, и/или с устройством, рендеринга, таким как дисплей системы. Во время действия 137 способа можно выполнять в реальном времени рендеринг ультразвукового изображения 202 на дисплее системы или выполнять рендеринг по меньшей мере одной из N' плоскостей изображения (например, двух ортогональных ультразвуковых изображений 304, 304').
На фиг. 4 показан участок снимка 400 с экрана графического пользовательского интерфейса (GUI) 402, включающий в себя кадр 404 изображения в реальном времени. Как показано на фиг. 4, кадр 404 изображения в реальном времени включает в себя два двумерных изображения 10, 12 рядом друг с другом. Изображением 12 на правой стороне фиг. 4 представлена плоскость изображения, ортогональная к плоскости изображения, полученной для отображения изображения 10. В этом варианте осуществления изображения 10 и 12 можно использовать для показа пользователю, что они выровнены в середине опухоли 14. Пунктирными линиями 16 на фиг. 4 представлены структуры опухоли. Как показано, линии, наложенные на изображение 10, пронумерованы как 1-5, при этом линия 3 сканирования соответствует положению плоскости изображения, которая использована для образования изображения 12. Линии 1, 2, 4, 5 соответствуют другим плоскостям изображения, которые ортогональны к плоскости изображения, использованной для образования изображения 10 (аналогично 206а-206d на фиг. 2). Обычно линии 1, 2, 4 и 5 сохраняют в системе, но не выводят на отображение. Отображают только изображение 12, которое соответствует линии 3. Кроме того, на фиг. 4 изображения, соответствующие линиям 1-5, изображены как пять небольших изображений 18, показывающих различные срезы или поперечные сечения опухоли 14 в пространстве. Поперечное сечение в центре опухоли 14 показано на изображениях 12 и 3, при этом центральное поперечное сечение опухоли показано на изображении 3 более крупным, чем боковые или смещенные от центра поперечные сечения, показанные на изображениях срезов 1, 2, 4, 5 опухоли.
Сплошной линией 3 на изображении 10 обозначено местоположение поперечного сечения в опухоли 14 (а именно, через центр опухоли 14), показанного в соседнем изображении, которое отображается в реальном времени как изображение 12 на правой панели интерфейса. Пунктирными линиями 1, 2, 4, 5 на изображении 10 показано, что эти смещенные от центра срезы опухоли доступны для выбора пользователем для отображения на правой панели интерфейса (то есть, правой стороне фиг. 4) вместо обычно отображаемого изображения 12. Конечно, если это желательно, больше одного среза опухоли можно отображать рядом с изображением 10, при этом можно одновременно отображать даже все имеющиеся срезы 1-5 опухоли. Однако, это перенасыщает графический пользовательский интерфейс и может приводить к путанице. В соответствии с этим только одно ультразвуковое изображение, соответствующее линии 3, отображается на изображении 12.
Кроме того, пунктирными линиями 1, 2, 4, 5 для пользователя обозначено, какие другие изображения (помимо отображенного изображения 12) получаются во время сканирования, но не показываются, поскольку на данный момент выбранное изображение, показанное на изображении 12, является центральным срезом опухоли, поскольку этот центральный срез, показанный сплошной линией 3 на изображении 10, выбран пользователем. То есть, различные поперечные сечения опухоли 14 по плоскостям 1-5 изображения сохраняются, в то время как только плоскость 3 изображения (выбранная пользователем) показывается как ортогональное изображение 12. В таком случае сохраняемые изображения в поперечном сечении можно рассматривать автономно и использовать, например, для количественного определения и/или также отображать на дополнительных изображениях рядом с обычными изображениями 10, 12, показанными на фиг. 4.
Следует отметить, что наряду с этим пользователь также может выбирать плотность сканирования или количество плоскостей или срезов объекта интереса, например опухоли, получаемых в реальном времени. Таким образом, вместо того, чтобы иметь 5 плоскостей или срезов, показанных на фиг. 4, пользователь может изменить плотность сканирования, например, увеличением количества получаемых в реальном времени срезов от 5 до 10. Кроме того, дополнительные срезы можно получать в реальном времени под различными углами. Например, в дополнение к 5 плоскостям или срезам 1-5, дополнительные 5 плоскостей или срезов 1'-5' (непоказанных) также можно получать и отображать в виде изображения, при этом дополнительные срезы 1'-5' ортогональны к срезам 1-5. Два ортогональных средних среза 3, 3' могут использоваться для лучшего обозначения центра опухоли 14, показанного посредством центра мишени. Дополнительное изображение может быть отображено рядом с изображением 12, аналогично изображению 304', показанному отображенным на фиг. 3 рядом с изображением 304, при этом, например, два изображения 304, 304' ортогональны друг к другу.
Графический пользовательский интерфейс 402 может включать в себя кадр 404 изображения в реальном времени и меню, при использовании которого пользователь может взаимодействовать со способом и/или системой. Соответственно, меню может включать в себя информацию, такую как значения N, выбранная плоскость сканирования (ВПС), неотображаемые плоскости сканирования (НПС), тип сканирования, область интереса и т.д., которая может быть включена в рамки 422, 418, 416, 423, 424, соответственно. Кроме того, пользовательский интерфейс 402 может включать в себя информацию 408 о дате, времени, информацию, относящуюся к сканеру, такую как идентификатор (ИД) 410 установки, информацию, относящуюся к специалистам, которые выполняют и/или определяют порядок сканирования, такую как идентификатор 406 доктора и идентификатор 412 пользователя (например, специалиста по ультразвуковой эхографии). Графический пользовательский интерфейс 402 также может включать в себя информацию, по которой можно идентифицировать пациента, такую как идентификатор 414 пациента. Если это желательно, сенсорная кнопка 420 может быть выбрана для изменения значения выбранной плоскости сканирования. Если это желательно, в дальнейших вариантах осуществления пользователь может, например, регулировать положение и/или количество нижележащих получаемых плоскостей сканирования, соответствующих N и/или N' срезам изображения, используя, например, поворотные ручки на панели управления ультразвукового сканера. В ином случае, сенсорная панель также может быть встроена в систему для осуществления управления пользователем.
В некоторых вариантах осуществления выбор N плоскостей изображения может автоматически приводить к выбору N' плоскостей изображения. Например, если N выбрано равным 2 (то есть, количество выбранных плоскостей сканирования равно 2), то изобразительная информация отображается на дисплее для обоих ортогональных срезов 2 и 2' (то есть, количество выбранных плоскостей сканирования с индексом равно 2) в виде двух изображений, таких как изображения 304, 304', показанные на фиг. 3. После завершения действия 137 в способе можно перейти к действию 141.
Во время действия 141 способ может включать в себя сохранение любой или выбранной информации, образуемой и/или используемой в способе, в запоминающем устройстве системы для последующего использования. Например, эхоинформация, изобразительная информация, образованная для каждой из N плоскостей изображения, изобразительная информация для ортогонального кадра, кадр изображения в реальном времени, установочные параметры, такие как N, выбранные плоскости сканирования, неотображаемые плоскости сканирования, фамилия пациента, специалист, выполняющий сканирование, тип сканирования, дата сканирования, фамилия доктора (который определяет порядок сканирования) и т.д. могут сохраняться в запоминающем устройстве системы для последующего использования, такого как автономное количественное определение или другая постобработка. В дополнение к этому сохраняемая информация может использоваться для определения параметров последующих сканирований, таких как последующие сканирования при ультразвуковой эхографии с контрастированием и т.д. Данные, используемые в, получаемые в, и/или образуемые в предложенной системе, могут сохраняться в любой подходящей системе архивирования, такой как система архивирования изображений. Кроме того, путем регулирования значения N, чтобы оно было меньше, чем N3D, количество плоскостей сканирования уменьшают, и этим можно сберечь ресурсы системы и уменьшить или исключить проблемы, связанные с рабочим потоком данных. После завершения действия 141 при желании в способе можно повторить действие 105 или можно перейти к действию 145, на котором способ заканчивают.
Кроме того, автономный способ, действия которого выполняют в соответствии с вариантами осуществления предложенной системы, можно использовать для выполнения количественного анализа данных, образуемых согласно способу, таких как изобразительная информация для N плоскостей изображения. Например, количественный анализ можно использовать для суммирования интенсивностей в области изображения (например, опухоли) во время процедуры ультразвуковой эхографии с контрастированием. Количественное определение интенсивности можно использовать для выявления объема сосудистой сети, имеющейся в опухоли, особенно при применениях, в которых интенсивность связана с наличием контрастного вещества в крови ткани. Кроме того, предполагается, что модифицированный метод Live-islice™, действия которого выполняются в соответствии с вариантами осуществления предложенной системы, можно выполнять при использовании матричного преобразователя, чтобы получать повышенную частоту кадров и последовательность действий в пределах обычных способов.
Согласно вариантам осуществления предложенной системы может выполняться визуализация данных в реальном времени для N плоскостей изображения, где 2
В вариантах осуществления предложенной системы данные могут образовываться при более высокой объемной скорости, чем в обычных трехмерных системах, работающих в реальном времени. Это может быть выгодным при выполнении способов ультразвуковой эхографии с контрастированием и может приводить к повышенной точности результата. Кроме того, благодаря наличию пользовательского интерфейса (UI), работающего в соответствии с вариантами осуществления предложенной системы, может быть исключено чрезмерное отвлечение внимания в критический момент времени. Следствием этого могут быть более точные результаты обследования и/или меньшее количество неудачных обследований.
Поскольку анализ трехмерной (3D) структуры, такой как опухоль, на основании информации, получаемой в результате использования одной плоскости сканирования, может быть ненадежным и поскольку полные трехмерные сканирования могут иметь временные и пространственные ограничения, вариантами осуществления предложенной системы обеспечиваются преимущества обоих этих способов. Например, при образовании N плоскостей сканирования, где N больше 2 и меньше количества (например, N3D) плоскостей сканирования, получаемых при использовании полного трехмерного сканирования, в вариантах осуществления предложенной системы может повышаться временной и пространственный контраст по сравнению с существующими системами, что делает возможным более быстрый и более точный анализ сканирования. Это улучшение может быть желательным для клинического подтверждения и широкого внедрения способов, используемых в вариантах осуществления предложенной системы.
Кроме того, при получении изобразительной информации, относящейся к множеству сканируемых плоскостей изображения (например, N плоскостям сканирования), может быть легче согласовывать изобразительную информацию, получаемую из по меньшей мере одной на данный момент определенной плоскости сканирования, с изобразительной информацией из плоскости сканирования, относящейся к предшествующему сканированию (например, полученной ранее и сохраненной в запоминающем устройстве системы) для сравнения при использовании, например, способов обработки изображений. Соответственно, благодаря более тщательному согласованию текущих и предшествующих плоскостей сканирования способы ультразвуковой эхографии с контрастированием, предназначенные для определения рабочих параметров в соответствии с вариантами осуществления предложенного способа, могут обеспечивать повышенную точность по сравнению с обычными способами ультразвуковой эхографии с контрастированием. Это может иметь практическую значимость при мониторинге лечения. Кроме того, аналогичные полезные результаты могут быть получены при использовании вариантов осуществления предложенной системы для получения характеристик исследований при использовании двумерных способов ультразвуковой эхографии с контрастированием для сбора информации из множества плоскостей сканирования (такого как N плоскостей сканирования) опухоли, чтобы получать характеристики опухоли. Например, путем получения информации о множестве плоскостей сканирования опухоли описание характеристик опухоли, которое в большей степени отражает характеристики полной опухоли, могут быть получены в противоположность информации, собираемой с использованием одной плоскости.
Что касается фиг. 5, то на ней в виде структурной схемы показана ультразвуковая система 510, выполненная в соответствии с принципами настоящего изобретения. Ультразвуковая система выполнена из двух подсистем, входной подсистемы 510A получения данных и подсистемы 510В отображения. Ультразвуковой датчик соединен с подсистемой получения данных и включает в себя двумерный матричный преобразователь 570 и формирователь 572 микролучей. Формирователь микролучей (ФМ) содержит схемы, которые управляют сигналами, подаваемыми на группы элементов (участки) матричного преобразователя 570, и выполняет некоторую обработку эхо-сигналов, принимаемых элементами каждой группы. Формирование микролучей в датчике выгодно уменьшает количество проводников в кабеле между датчиком и ультразвуковой системой и описано в патенте США №5997479 (Savord и другие) и в патенте США №6436048 (Pesque), и обеспечивает электронное управление лучами во время излучения и приема при высокой частоте кадров (прямого) изображения в реальном времени.
Датчик соединен с подсистемой 510A получения данных ультразвуковой системы. Подсистема получения данных включает в себя контроллер 574 формирователя лучей, который реагирует на пользовательский элемент 536 управления и формирует управляющие сигналы для формирователя 572 микролучей, информирующие датчик о синхронизации, частоте, направлении и фокусировке излучаемых лучей. Кроме того, контроллер формирователя лучей управляет формированием лучей при приеме эхо-сигналов подсистемой получения данных, управляя аналого-цифровыми преобразователями (АЦП) 518 и формирователем 520 лучей. Эхо-сигналы частично сформированных лучей, принимаемые датчиком и усиливаемые предварительным усилителем (ПУ) и схемой 516 временной регулировки усиления (ВРУ), далее преобразуются в цифровую форму аналого-цифровыми преобразователями 518. Далее эхо-сигналы в цифровой форме преобразуются в полностью управляемые и фокусируемые лучи основным системным формирователем 520 лучей. Далее эхо-сигналы обрабатываются процессором 522 изображений, который выполняет, например, цифровую фильтрацию, обнаружение в В-режиме и также может выполнять другую обработку сигналов, такую как разделение гармоник, понижение уровня спеклов и другую необходимую обработку сигналов изображений.
Эхо-сигналы, создаваемые подсистемой 510А получения данных, вводятся в подсистему 510В отображения, в которой эхо-сигналы обрабатываются для отображения в заданном формате изображения. Эхо-сигналы обрабатываются процессором 524 строк изображения, который способен формировать выборки эхо-сигналов, сращивать сегменты лучей в полные строчные сигналы и усреднять строчные сигналы для повышения отношения сигнала к шуму или улучшения сохранности потока. Строки изображения для двумерного изображения преобразуются при сканировании в заданный формат изображения сканирующим преобразователем 526, который выполняет преобразование Радона с различными углами тета, известное в данной области техники. Поэтому сканирующий преобразователь может осуществлять форматирование в прямолинейное или секторное изображение. Далее изображение сохраняется в памяти 528 для хранения изображений, из которой оно может быть отображено на дисплее 538. На изображение в памяти также накладывается графика, отображаемая вместе с изображением, которая создается генератором 534 графики, реагирующим на пользовательский элемент 536 управления, так что создаваемая графика оказывается связанной с изображениями на дисплее. Отдельные изображения или последовательности изображений могут сохраняться в кинопамяти 530 во время захвата циклов или последовательностей изображений. Например, что касается фиг. 2, то ультразвуковая система визуализации выполнена с возможностью отображения ультразвукового изображения 202, соответствующего выбранной одной из N плоскостей изображения, и/или ультразвукового изображения 204, соответствующего одной из N' плоскостей изображения, получаемых с помощью матричного преобразователя. Линии (например, 206а) могут быть отображены с помощью генератора графики поверх отображаемого изображения.
Двумерный матричный преобразователь может выполнять операции по получению данных в виде изображения из по меньшей мере одной из N или N' плоскостей изображения. Например, двумерный матричный преобразователь может использоваться для образования изображений, которые соответствуют плоскостям 206а, 206b, 204а, 206с и 206d изображений из фиг. 2. Когда матричный датчик выполняет операции по сканированию как N плоскостей изображения, так и N' плоскостей изображения (как, например, на фиг. 3), выбранных путем управления с панели 536 управления, контроллер 574 формирователя лучей осуществляет управление поочередным получением в реальном времени изображений из двух различных плоскостей изображения в быстрой последовательности. Кроме того, управление с панели 536 управления можно использовать для выбора желаемого угла и ориентации различных сканируемых плоскостей изображения, например, поворот, наклон или угол места могут быть изменены. Как показано на фиг. 2, прямые изображения двух из N и N' плоскостей изображения могут быть отображены как расположенные последовательно. В одном варианте осуществления специалист по ультразвуковой эхографии может удерживать неподвижно матричный датчик, чтобы анатомия опухолевой мишени постоянно отображалась в одной 202 из N' плоскостей изображения, и затем может обратиться к управлению с панели управления для наклона, поворота или изменения угла места одной из N' плоскостей изображения, чтобы образовать изображение 204. В соответствии с принципами настоящего изобретения двухплоскостные изображения могут отображаться, сохраняться и/или экспортироваться в стандартный формат в виде двух изображений в одном и том же кадре изображения или в виде независимых изображений. Кроме того, хотя это и не показано, система также может включать в себя 3D-процессор, который, если это желательно, может использоваться для отображения трехмерных объемов.
Варианты осуществления предложенной системы могут быть совместимыми с ультразвуковыми системами, имеющими матричный преобразователь, такой как матричные преобразователи Philips™ типа Х5-1, Х6-1, Х7-2 и X7-2t и т.п. Кроме того, предполагается, что вариантами осуществления предложенной системы могут предоставляться усовершенствованные системы и способы для применений, при которых могут требоваться (в реальном времени или в автономном режиме) визуализация и/или количественное определение многочисленных плоскостей сканирования, например, при мониторинге терапии опухоли.
Хотя настоящее изобретение было показано и описано с обращением к конкретным примерам вариантов осуществления, специалистам в данной области техники должно быть понятно, что настоящее изобретение не ограничено ими, а различные изменения по форме и в деталях, включая объединение различных признаков и вариантов осуществления, могут быть сделаны без отступления от сущности и объема изобретения.
Дальнейшие изменения предложенной системы без труда придут в голову специалиста в данной области техники и они будут охватываться нижеследующей формулой изобретения.
Наконец, приведенное выше рассмотрение предполагается только иллюстрирующим предложенную систему и не должно толковаться как ограничивающее прилагаемую формулу изобретения каким-либо конкретным вариантом осуществления или группой вариантов осуществления. Таким образом, хотя предложенная система описана с обращением к примерам вариантов осуществления, следует также понимать, что многочисленные модификации и иные варианты осуществления могут быть разработаны специалистами в данной области техники без отступления от широкой предполагаемой сущности и объема предложенной системы, изложенной в формуле изобретения, которая следует ниже. Описание и чертежи следует считать иллюстративными, и они не предполагаются ограничивающими объем прилагаемой формулы изобретения.
При интерпретации прилагаемой формулы изобретения следует понимать, что:
a) слово «содержащий» не исключает наличия других элементов или действий помимо элементов и действий, перечисляемых в представленной формуле изобретения;
b) указание на единственность, предшествующее элементу, не исключает множества таких элементов;
c) любые позиции в формуле изобретения не ограничивают ее объем;
d) несколько «средств» могут быть представлены одним и тем же компонентом, или аппаратным обеспечением, или программным обеспечением, реализующим структуру или функцию;
e) любой из раскрытых элементов может быть основан на аппаратных блоках (например, включая дискретные и интегральные электронные схемы), программных блоках (например, на компьютерном программировании) и любом сочетании их;
f) аппаратные блоки могут содержать один из аналогового и дискретного блока или оба блока;
g) любые из раскрытых устройств или блоков могут быть объединены друг с другом или разделены на дополнительные блоки, если специально не оговорено иное;
h) конкретная последовательность действий или этапов не предполагается необходимой, если специально не указано иное; и
i) термин «множество элементов» охватывает два или большее количество заявленных элементов, и не подразумевается никакой конкретный диапазон количества элементов; то есть, множество элементов может быть только лишь двумя элементами и может включать в себя неизмеримое количество элементов.
Реферат
Группа изобретений относится к ультразвуковым средствам визуализации, более конкретно к ультразвуковым системам и способам визуализации, предназначенным для получения данных во многих плоскостях в режимах одно- и двухплоскостной визуализации в реальном времени. Ультразвуковая система визуализации содержит контроллер, выполненный с возможностью определения количества N из множества плоскостей изображения для сканирования на протяжении области интереса, получения эхоинформации, соответствующей каждой из плоскостей изображения в множестве плоскостей изображения, формирования изобразительной информации для каждой из плоскостей изображения на основании получаемой эхоинформации, сохранения изобразительной информации, соответствующей каждой из плоскостей изображения, в запоминающем устройстве системы, выбора плоскости изображения из множества плоскостей изображений, и отображения ультразвукового изображения, сформированного на основании изобразительной информации для выбранной плоскости изображения, без отображения изображений, соответствующих другой одной или нескольким полученным, но не выбранным для отображения плоскостям изображения из множества плоскостей изображения. Способ отображения ультразвуковых изображений осуществляется посредством системы. Использование изобретений позволяет повысить точность измерений и упростить их последовательность. 2 н. и 13 з.п. ф-лы, 5 ил.
Комментарии