Система обследования с множеством ультразвуковых преобразователей - RU2617809C2
Код документа: RU2617809C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области систем обследования, в частности настоящее изобретение относится к системам обследования, содержащим интервенционные устройства с множеством ультразвуковых преобразователей и к соответствующему способу, компьютерному программному продукту и применению такой системы.
УРОВЕНЬ ТЕХНИКИ
Системы обследования, содержащие интервенционные устройства с ультразвуковыми преобразователями для предоставления информации изнутри соседних образцов ткани, таких как анатомические области, например структура сердца, могут подвергаться перегрузке информацией. Это может быть решающим в ситуациях использования, где нужно принимать важные решения в рамках ограниченного периода времени. Чтобы предотвратить перегрузку информацией, количество информации можно уменьшить, например, путем отбрасывания информации. Однако это могло бы привести к потере релевантной информации. Конечно, это улучшило бы ситуацию, если было бы можно использовать полученную информацию усовершенствованным способом.
Ссылочный материал US 2003/0229286 A1 описывает вращательно вибрирующий катетер для формирования изображений и способ использования, причем катетер содержит массив ультразвуковых или оптических преобразователей и исполнительный механизм вместе с подсистемами обработки сигналов, отображения и питания. Исполнительный механизм из предпочтительного варианта осуществления является твердотельным нитиноловым исполнительным механизмом. Исполнительный механизм заставляет массив колебаться так, что наконечник катетера поворачивается на угол меньший либо равный 360 градусам. Наконечник затем допускает вращение обратно на ту же величину. Это действие повторяется, пока не получена нужная информация для формирования изображений. Вращательно вибрирующий катетер создает больше точек формирования изображений, чем невращающийся катетер для формирования изображений, и устраняет области отсутствия информации на восстановленном изображении. Ссылочный материал WO 2010/138448 A1 описывает катетерный комплект, который включает в себя катетер и доставочный элемент. Катетер имеет дистальный конец с дистальным наконечником, проксимальный конец и продольную длину, катетер включает в себя корпус, который задает центральный просвет, идущий вдоль катетера до дистального конца. Катетер также включает в себя обращенную вперед решетку преобразователей, расположенную на дистальном наконечнике катетера. Решетка преобразователей конфигурируется и выполняется с возможностью преобразования поданных электрических сигналов в звуковые сигналы, а также для преобразования принятых эхо-сигналов в электрические сигналы. По меньшей мере один проводник катетера электрически соединяется с решеткой преобразователей и идет вдоль катетера. Доставочный элемент располагается в просвете катетера.
Была бы полезной усовершенствованная система обследования для обследования ассоциированного образца ткани, и, в частности, была бы полезной система обследования, которая дает возможность получения и использования больших количеств информации из ассоциированного образца ткани усовершенствованным, более эффективным, простым, быстрым и/или надежным способом.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В частности, целью настоящего изобретения может считаться предоставление системы обследования, которая решает вышеупомянутые проблемы известного уровня техники касательно получения и использования больших количеств информации из ассоциированного образца ткани усовершенствованным, более эффективным, простым, быстрым и/или надежным способом.
Дополнительная цель настоящего изобретения - предоставить альтернативу известному уровню техники.
Таким образом, вышеописанная цель и несколько других целей предназначены для достижения в первом аспекте изобретения путем предоставления системы обследования для обследования ассоциированного образца ткани, при этом система обследования содержит
- интервенционное устройство, содержащее:
- множество ультразвуковых преобразователей, где разные ультразвуковые преобразователи во множестве ультразвуковых преобразователей выполнены с возможностью получения пакетов ультразвуковой информации из пространственно разных областей образца ткани, когда ассоциированный образец ткани размещается рядом с множеством ультразвуковых преобразователей,
- устройство отображения, выполненное с возможностью приема и визуализации пакетов ультразвуковой информации в пространственно разных областях ультразвукового отображения на устройстве отображения,
где относительные пространственные положения разных областей ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей образца ткани и где система обследования дополнительно содержит блок обработки, выполненный с возможностью определения пакетов информации о контакте с тканью на основе пакетов ультразвуковой информации, где пакеты информации о контакте с тканью указывают контакт с тканью между интервенционным устройством и ассоциированным образцом ткани в положениях ультразвуковых преобразователей.
Изобретение особенно, но не исключительно, полезно для получения пакетов ультразвуковой информации из пространственно разных областей образца ткани и для визуализации пакетов ультразвуковой информации способом, в котором относительные пространственные положения разных областей ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей образца ткани, что обладает тем эффектом, что информация из разных соседних областей образца ткани представляется наблюдателю устройства отображения очень наглядным способом. Таким образом, наблюдателю не нужно переключаться между разными изображениями или постоянно не приходится помнить, какая часть устройства отображения соответствует какой части ассоциированного образца ткани.
Изобретение решает проблему того, что положение, например, ультразвуковых изображений в M-режиме, например на экране, который будет наблюдать человек во время, например, абляционного вмешательства, не соответствует положению ультразвуковых преобразователей на конце интервенционного устройства, например на наконечнике катетера. Настоящее изобретение предлагает устранить эту проблему путем визуального наглядного помещения местоположения сформированных изображений соответствующим фактическому местоположению преобразователей в интервенционном устройстве. Таким образом, учитывая относительные пространственные положения разных соседних областей образца ткани (которые зависят от технических характеристик, например технических характеристик интервенционного устройства, таких как положения и ориентации ультразвуковых преобразователей на интервенционном устройстве), можно решить техническую проблему оптимизации обращения с интервенционным устройством. В конкретном варианте осуществления устройство отображения также содержит вход для приема относительных пространственных положений разных соседних областей образца ткани.
Отмечается, что система обследования в соответствии с изобретением дополнительно может быть подходящей в том, что она понятно отражает состояние системы, поскольку разные области ультразвукового отображения (будучи размещенными в соответствии с изобретением) могут отражать наблюдателю состояние системы.
Сущность изобретения можно описать как получение информации от всех ультразвуковых преобразователей во множестве ультразвуковых преобразователей и представление этой информации наглядным способом, чтобы релевантную информацию можно было очень быстрым и соответственно наглядным способом представить получателю информации. Таким образом, ни системе обследования, ни получателю не нужно тратить время или ресурсы для выбора того, какую информацию не нужно представлять. Соответственно основной идеей изобретения можно считать то, что можно потерять ценную информацию, если не представляется информация от одного или нескольких ультразвуковых преобразователей, например, если алгоритм компьютера решил не показывать информацию от конкретного ультразвукового преобразователя или получатель-человек выбрал скрытие информации от конкретного ультразвукового преобразователя, например, путем переключения между изображениями, которые будут показаны, и отбрасывания информации таким образом. Также идеей, лежащей в основе настоящего изобретения, можно считать то, что, если информация из разных соседних областей ткани представляется наглядным подходящим способом, то система человеческого зрения, вероятно, является лучшей для обнаружения релевантной информации, поэтому система в соответствии с настоящим изобретением может эффективно дать возможность использования отличного человеческого зрения и возможностей анализа изображений.
Кроме того, сущностью изобретения также можно считать то, что дополнительная информация может извлекаться из пакетов ультразвуковой информации путем представления пакетов ультразвуковой информации в соответствии с изобретением. Изобретение фактически могло бы предоставить наблюдателю новую информацию, потому что наблюдатель может связать друг с другом признаки ткани, наблюдаемые в отдельных пакетах ультразвуковой информации в пространственно разных областях ультразвукового отображения. Другими словами, система, способ и применение в соответствии с изобретением потенциально могут не только сделать возможным, что пользователю предоставляется больше информации (поскольку никакую информацию не нужно отбрасывать, чтобы не рисковать перегрузкой наблюдателя информацией, которую наблюдатель не может интерпретировать), но система, способ и применение посредством технических характеристик системы, способа и применения в соответствии с независимыми пунктами формулы изобретения, прилагаемой к описанию, к тому же могут дать наблюдателю возможность идентифицировать признаки в сочетании пакетов ультразвуковой информации, которые в противном случае выглядели бы нерелевантными, будучи идентифицированными в отдельных пакетах ультразвуковой информации.
Более того, наблюдатель по возможности может использовать информацию из отдельных пакетов ультразвуковой информации, изображенных в пространственно разных областях ультразвукового отображения, чтобы высказать компетентное предположение касательно информации в областях, которые не исследуются. Таким образом, изобретение могло бы дать наблюдателю возможность интерполировать между соседними областями ультразвукового отображения, чтобы получить дополнительную информацию.
Под "ассоциированным образцом ткани" понимается часть ткани, например животной ткани, например ткани в мертвом или живом теле человека или животного. Образец ткани взаимозаменяемо может называться "анатомической областью".
"Интервенционное устройство" обычно известно в данной области техники и может включать в себя любое из неисчерпывающего списка, содержащего катетер, иглу, биопсийную иглу или эндоскоп.
Подразумевается, что "ультразвуковые преобразователи" известны в данной области техники как элементы, которые при приведении в действие могут излучать и/или принимать ультразвуковые сигналы. Приведение в действие может быть приложенным напряжением. Ультразвуковой преобразователь, приспособленный для приема ультразвуковых сигналов, может преобразовать принятый ультразвуковой сигнал в напряжение, например изменяющееся во времени напряжение. Под множеством ультразвуковых преобразователей понимается целое число больше единицы, например 2, 3, 4, 5, 6, 7, 8, 9 или более ультразвуковых преобразователей.
Под "пакетами ультразвуковой информации" понимается информация, полученная посредством ультразвуковых преобразователей, например принятая интенсивность в зависимости от времени, например принятая интенсивность в зависимости от времени в течение конкретного периода времени для конкретной пространственной области, например принятый ультразвуковой сигнал, предполагаемый указывающим конкретную пространственную область соседнего ассоциированного образца ткани.
Под ультразвуковым преобразователем или множеством ультразвуковых преобразователей, "выполненных с возможностью получения пакетов ультразвуковой информации", понимается то, что ультразвуковой преобразователь или множество ультразвуковых преобразователей выполнены так, что ультразвуковые сигналы, которые несут информацию из соседнего ассоциированного образца ткани, принимаются ультразвуковым преобразователем или множеством ультразвуковых преобразователей и преобразуются в считываемый сигнал, например сигнал напряжения. В конкретном варианте осуществления ультразвуковой сигнал излучается из ультразвукового преобразователя, отражается от соседнего ассоциированного образца ткани в одном или нескольких положениях и принимается тем же или другим ультразвуковым преобразователем.
Под "пространственно разными областями образца ткани" понимаются разные области, например разные объемы, например неидентичные, перекрывающиеся или неперекрывающиеся объемы ассоциированного образца ткани, каковые разные области не имеют одинакового положения в пространстве.
Под "устройством отображения" понимается любое устройство, допускающее отображение информации, полученной из "пространственно разных областей образца ткани", где устройство допускает пространственное разрешение на разные области ультразвукового отображения. В конкретных вариантах осуществления устройство отображения может быть экраном компьютера, например компьютерным монитором, или набором светоизлучающих блоков, таких как светодиоды, пространственно размещенных для совпадения с соответствующими положениями разных соседних областей образца ткани.
Под выражением "для приема и визуализации пакетов ультразвуковой информации" понимается то, что принимается информация в пакетах ультразвуковой информации, например принимается аналого-цифровым преобразователем (ADC), и что информация визуализируется, например изображается в виде полутонового изображения, или анализируется и визуализируется в виде одномерного значения, например информация, анализируемая и преобразуемая в уровень контакта с тканью, который можно визуализировать просто с помощью силы и/или цвета света.
Фраза "относительные пространственные положения разных областей ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей образца ткани" дополнительно будет объясняться ниже. Разные соседние области образца ткани имеют некое положение (в ассоциированном образце ткани) и, поскольку существует более одной соседней области образца ткани, каждое из их положений можно задать относительно других. В формулировке из аналитической геометрии положения каждой из соседних областей образца ткани можно задать вектором в системе координат, например системе координат, привязываемой к интервенционному устройству и/или ассоциированному образцу ткани. Система координат может быть, например, двумерной. Таким образом, первый набор векторов может описывать положения соседних областей образца ткани. Аналогичным образом второй набор векторов может описывать области ультразвукового отображения. Под "совпадением" понимается, что пространственные соотношения в показателях длины и ориентации между векторами в каждом наборе практически идентичны.
Изобретение включает в себя варианты осуществления, где второй набор векторов растянут, например масштабирован по-разному в разных направлениях, например разность растяжения находится в пределах 0-50%, например в пределах 0-40%, например в пределах 0-30%, например в пределах 0-20%, например в пределах 0-10%.
Изобретение включает в себя варианты осуществления, где один или несколько отдельных векторов во втором наборе векторов отличаются по длине относительно длины соответствующего вектора во втором наборе векторов, имеющем точно такие же пространственные соотношения, как и первый набор векторов, например имеющие разность длины в пределах 0-50%, например в пределах 0-40%, например в пределах 0-30%, например в пределах 0-20%, например в пределах 0-10%.
Изобретение включает в себя варианты осуществления, где один или несколько отдельных векторов во втором наборе векторов наклонены, например немного наклонены относительно угла соответствующего вектора во втором наборе векторов, имеющем точно такие же пространственные соотношения, как и первый набор векторов, например наклонены в пределах 0-45 градусов, например в пределах 0-30 градусов, например в пределах 0-20 градусов, например в пределах 0-10 градусов, например в пределах 0-5 градусов, например в пределах 0-1 градуса.
В конкретном варианте осуществления взаимная ориентация каждой из разных областей ультразвукового отображения вокруг оси через середину области ультразвукового отображения совпадает с взаимной ориентацией соседних областей образца ткани вокруг их соответствующих осей. Это особенно важно, если области ультразвукового отображения отображают изображения, например двумерные изображения.
В конкретном варианте осуществления взаимная ориентация каждой из разных областей ультразвукового отображения вокруг оси через середину области ультразвукового отображения совпадает с взаимными ориентациями соседних областей образца ткани вокруг их соответствующих осей в пределах 0-90 градусов, 0-60 градусов, 0-45 градусов, например в пределах 0-30 градусов, например в пределах 0-20 градусов, например в пределах 0-10 градусов, например в пределах 0-5 градусов, например в пределах 0-1 градуса. Наличие совпадающих вращений будет обладать преимуществом в том, что в противном случае изображения, например с разных сторон интервенционного устройства, могут выглядеть наклоненными или перевернутыми вверх дном по отношению друг к другу.
Также подразумевается, что положение и ориентация множества ультразвуковых преобразователей могут быть практически идентичны относительным пространственным положениям разных соседних областей образца ткани и что "относительные пространственные положения и/или ориентации разных соседних областей образца ткани" могут использоваться взаимозаменяемо с "относительными пространственными положениями и/или ориентациями ультразвуковых преобразователей во множестве ультразвуковых преобразователей".
Отметим, что датчики контакта с тканью могут быть реализованы с помощью самих ультразвуковых преобразователей, где полученные с помощью ультразвуковых преобразователей изображения можно анализировать, чтобы извлечь степень контакта с тканью между каждым из ультразвуковых преобразователей и тканью. Другими словами, уровень контакта с тканью выводится из ультразвуковых изображений. В другом варианте осуществления изобретение дополнительно относится к системе обследования, дополнительно содержащей блок обработки, например блок анализа изображений, выполненный с возможностью определения уровня контакта с тканью между ультразвуковым преобразователем из соответствующего пакета информации. Например, пакет ультразвуковой информации можно преобразовать в изображение с помощью процессора, который также выполнен с возможностью осуществления анализа изображений, чтобы определить уровень контакта с тканью между тканью и ультразвуковым преобразователем.
В дополнительном варианте осуществления изобретение дополнительно относится к системе обследования, в которой устройство отображения выполнено с возможностью приема и визуализации пакетов информации о контакте с тканью в пространственно разных областях отображения контакта с тканью в устройстве отображения и где относительные пространственные положения разных областей отображения контакта с тканью аналогичны относительным пространственным положениям датчиков контакта с тканью. Преимущество этого может состоять в том, что оно дает возможность визуализации наглядным образом, где интервенционное устройство находится в контакте с тканью. Таким образом, наблюдателю не нужно постоянно помнить, какие области отображения контакта с тканью соответствуют какой части ассоциированного образца ткани.
В другом варианте осуществления изобретение дополнительно относится к системе обследования, дополнительно содержащей блок обработки, например блок анализа изображений, выполненный с возможностью идентификации заранее установленных признаков в пакетах информации, например стенки сердца или повреждения. Например, пакеты ультразвуковой информации можно преобразовать в изображения с помощью процессора, который также выполнен с возможностью осуществления анализа изображений, чтобы определить конкретные, заранее установленные признаки на изображениях, например некоторые отражения, например от стенки органа.
В дополнительном варианте осуществления изобретение дополнительно относится к системе обследования, в которой устройство отображения дополнительно выполнено с возможностью указания положения любого из заранее установленных признаков на областях ультразвукового отображения. Информация о положении заранее установленных признаков может наглядным образом передаваться наблюдателю путем их маркирования на областях ультразвукового отображения, например путем изменения цвета, с помощью яркой или темной линии, стрелок или т.п.
В другом варианте осуществления изобретение дополнительно относится к системе обследования, в которой интервенционное устройство является любым из эндоскопа, катетера, биопсийной иглы. Преимущество наличия интервенционного устройства может состоять в том, что оно дает возможность получения информация изнутри ассоциированных образцов ткани или полых объектов с узким входом.
В другом варианте осуществления изобретение дополнительно относится к системе обследования, в которой множество ультразвуковых преобразователей содержит по меньшей мере 3 разных ультразвуковых преобразователя. В другом варианте осуществления изобретение дополнительно относится к системе обследования, в которой множество ультразвуковых преобразователей содержит по меньшей мере 4, 5, 6, 7, 8, 9 или более разных ультразвуковых преобразователей. Преимущество наличия 3 или более ультразвуковых преобразователей может состоять в том, что из ассоциированного образца ткани можно получить более подробный уровень информации, например информацию с лучшим пространственным или временным разрешением.
В другом варианте осуществления изобретение дополнительно относится к системе обследования, в которой координата по меньшей мере одного ультразвукового преобразователя во множестве ультразвуковых преобразователей определяется относительно неподвижной системы координат, например посредством анализа изображений, например посредством оптического обмера контуров, например посредством маркерного блока. Преимущество этого может состоять в том, что оно делает возможным то, что наблюдателю предоставляется информация касательно положения по меньшей мере одного ультразвукового преобразователя, например положения относительно некоторого неподвижного объекта, например устройства отображения или земли, например положения относительно ассоциированного образца ткани.
В дополнительном варианте осуществления изобретение дополнительно относится к системе обследования, в которой пространственные положения разных областей ультразвукового отображения основываются на упомянутой координате. Например, если интервенционное устройство поворачивают, то области ультразвукового отображения могут соответственно поворачиваться или если интервенционное устройство перемещают вверх или вниз, то области ультразвукового отображения могут соответственно перемещаться вверх или вниз.
В другом варианте осуществления изобретение дополнительно относится к системе обследования, в которой пространственно разные области образца ткани располагаются вокруг интервенционного устройства. Преимущество этого может состоять в том, что оно дает возможность получения информации касательно ассоциированного образца ткани, располагаемого вокруг интервенционного устройства. Другое преимущество может состоять в том, что можно получить информацию из относительно большой области ассоциированного образца ткани, поскольку относительно узкое интервенционное устройство, оснащенное ультразвуковыми преобразователями для получения пакетов ультразвуковой информации из множества пространственно разных областей образца ткани, располагаемых вокруг интервенционного устройства, дает возможность извлечения информации из ассоциированного образца ткани, который больше, например значительно больше, поперечного сечения интервенционного устройства. На самом деле, нужно сделать только небольшое отверстие в ассоциированной ткани, чтобы получить информацию из большой области ассоциированного образца ткани. В варианте осуществления ультразвуковые преобразователи во множестве ультразвуковых преобразователей обращены наружу относительно интервенционного устройства, например выполнены с возможностью излучения ультразвуковых сигналов в пространственно разные области образца ткани, которые располагаются вокруг интервенционного устройства, и/или приема ультразвуковых сигналов из пространственно разных областей образца ткани, которые располагаются вокруг интервенционного устройства.
В варианте осуществления изобретение дополнительно относится к системе обследования, в которой интервенционное устройство и устройство отображения прикрепляются к рукоятке, например области ультразвукового отображения располагаются по разным сторонам рукоятки, например вокруг рукоятки. Преимущество может состоять в том, что человек, эксплуатирующий интервенционное устройство, получит устройство отображения, помещенное в положение, а именно рукоятку, куда естественным образом направлено внимание. Другое преимущество может состоять в том, что это дает возможность объединения частей, поскольку рукоятка и устройство отображения объединяются в один блок.
В другом варианте осуществления изобретение дополнительно относится к системе обследования, в которой пространственно разные области образца ткани не перекрываются. В другом варианте осуществления изобретение дополнительно относится к системе обследования, в которой пространственно разные области образца ткани перекрываются.
В соответствии со вторым аспектом изобретения изобретение дополнительно относится к способу в соответствии с независимым пунктом формулы изобретения на способ.
В соответствии с третьим аспектом изобретения изобретение дополнительно относится к компьютерному программному продукту в соответствии с независимым пунктом формулы изобретения на компьютерный программный продукт.
В соответствии с четвертым аспектом изобретения изобретение дополнительно относится к применению системы обследования в соответствии с первым аспектом для обследования ассоциированного образца ткани.
Каждый из первого, второго, третьего и четвертого аспектов настоящего изобретения может объединяться с любым из других аспектов. Эти и другие аспекты изобретения станут очевидными и разъясненными со ссылкой на варианты осуществления, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сейчас будут подробнее описываться система, способ, компьютерный программный продукт и применение в соответствии с изобретением относительно прилагаемых чертежей. Фигуры показывают один способ реализации настоящего изобретения и не должны трактоваться как ограничивающие другие возможные варианты осуществления, входящие в объем приложенной формулы изобретения.
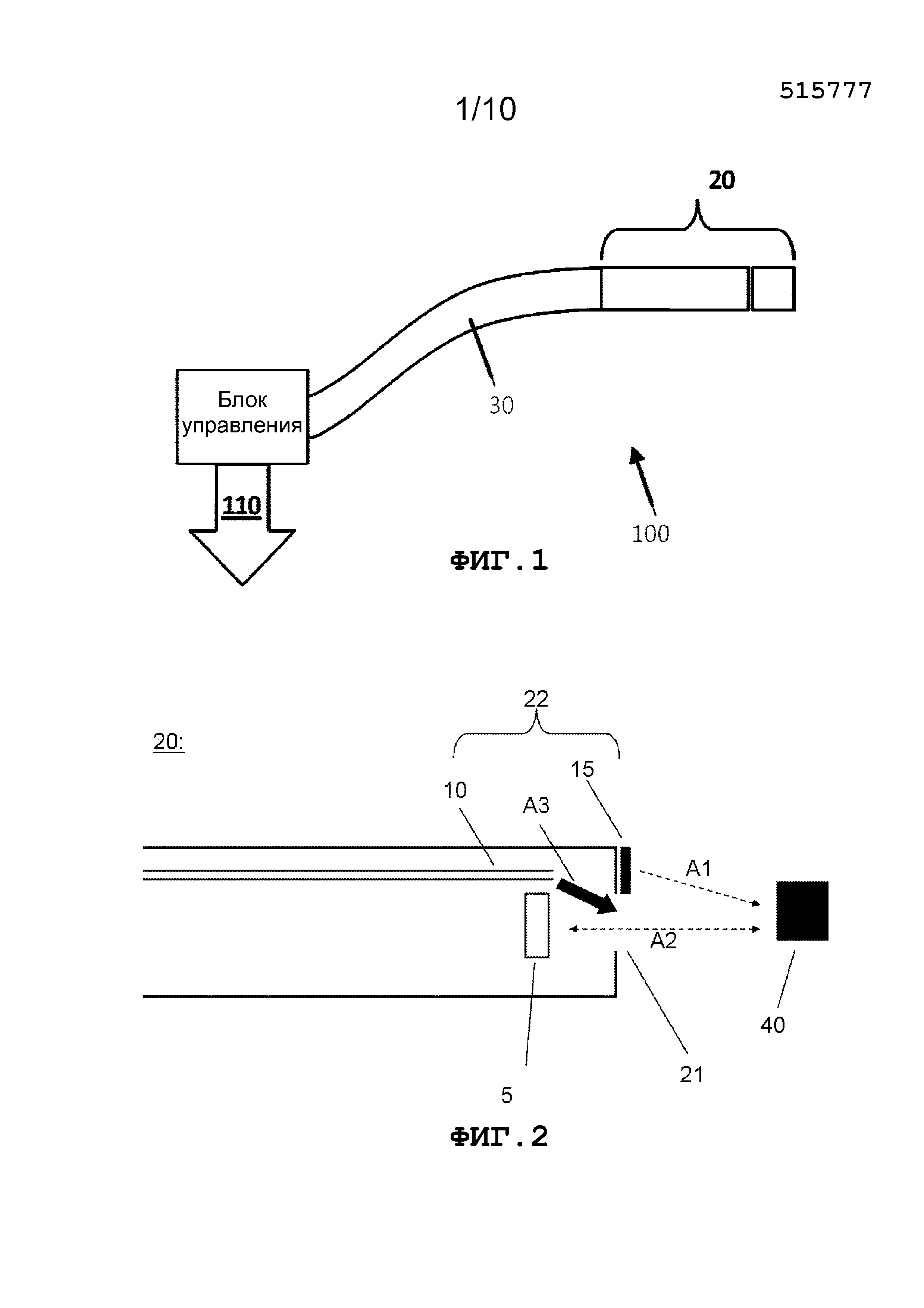
Фиг. 1 показывает общую систему 100 для получения информации посредством ультразвука,
Фиг. 2 показывает схематический поперечный разрез катетера,
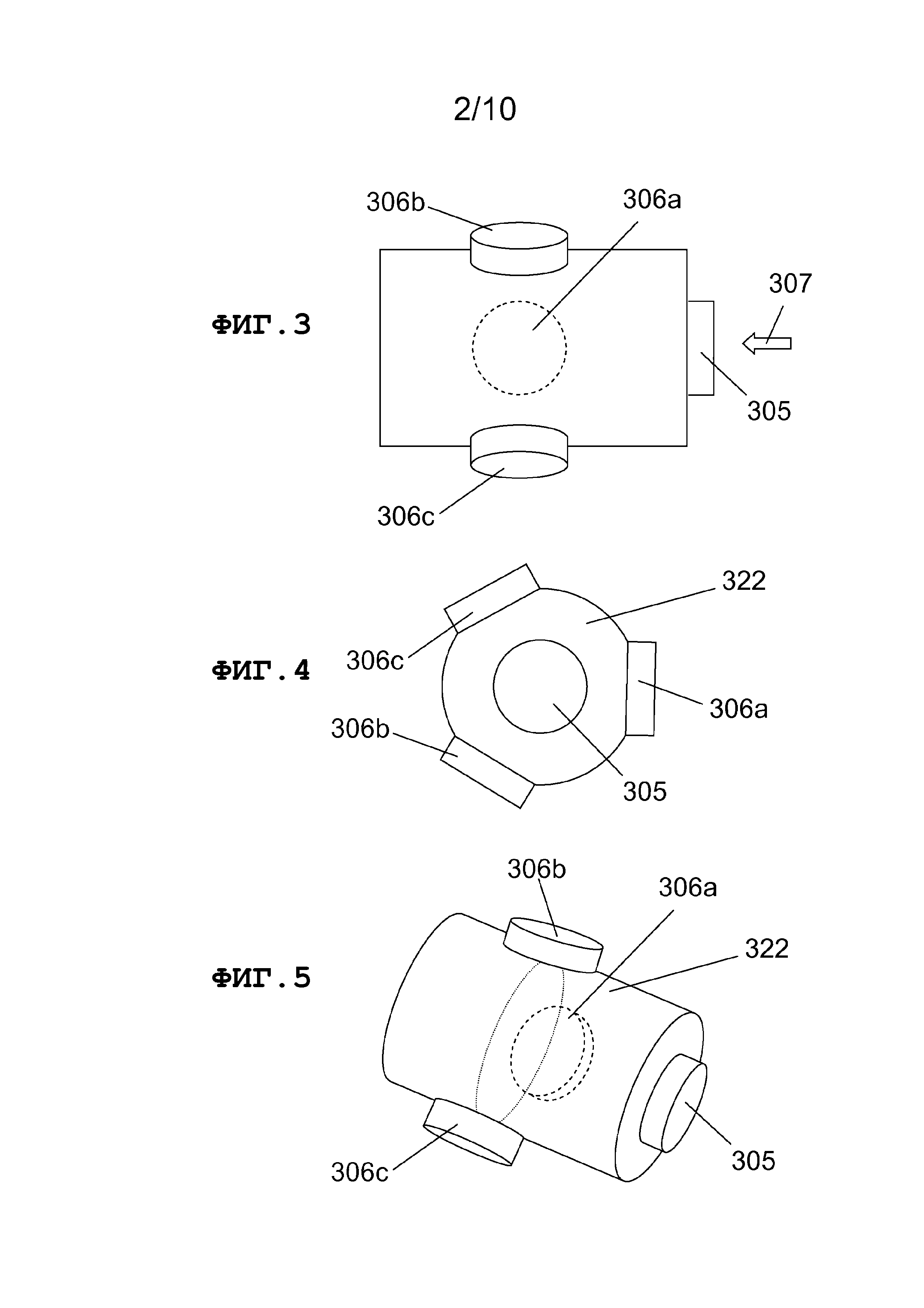
Фиг. 3-5 показывают вид сбоку, вид с торца и вид в перспективе дистального конца интервенционного устройства,
Фиг. 6, 7 показывают стилизованный и реальный примеры изображения в M-режиме,
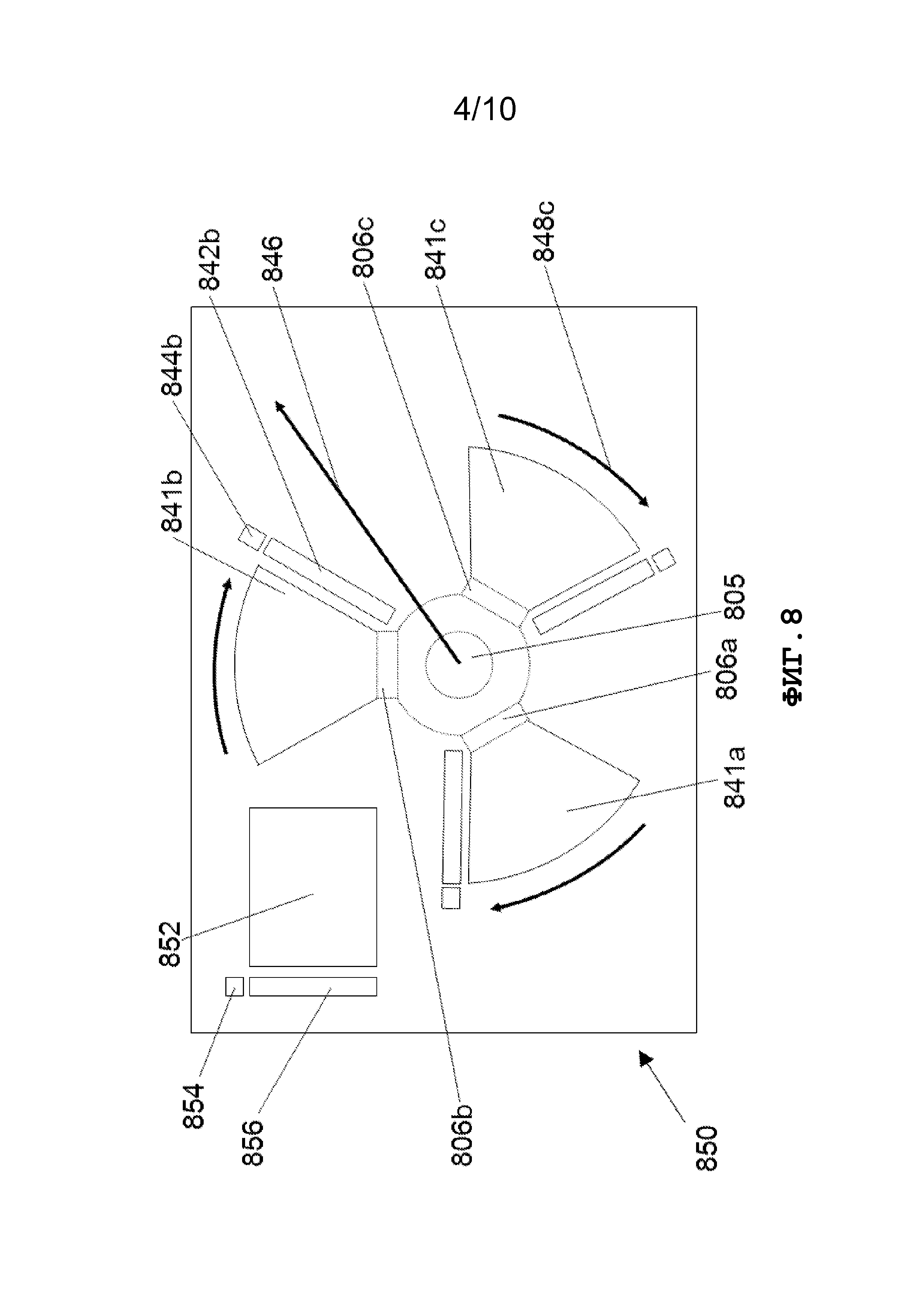
Фиг. 8-11 показывают типовые графические интерфейсы устройств отображения,
Фиг. 12 показывает рукоятку катетера для радиочастотной абляции,
Фиг. 13 показывает систему обследования,
Фиг. 14, 15 показывают первый набор векторов и второй набор векторов,
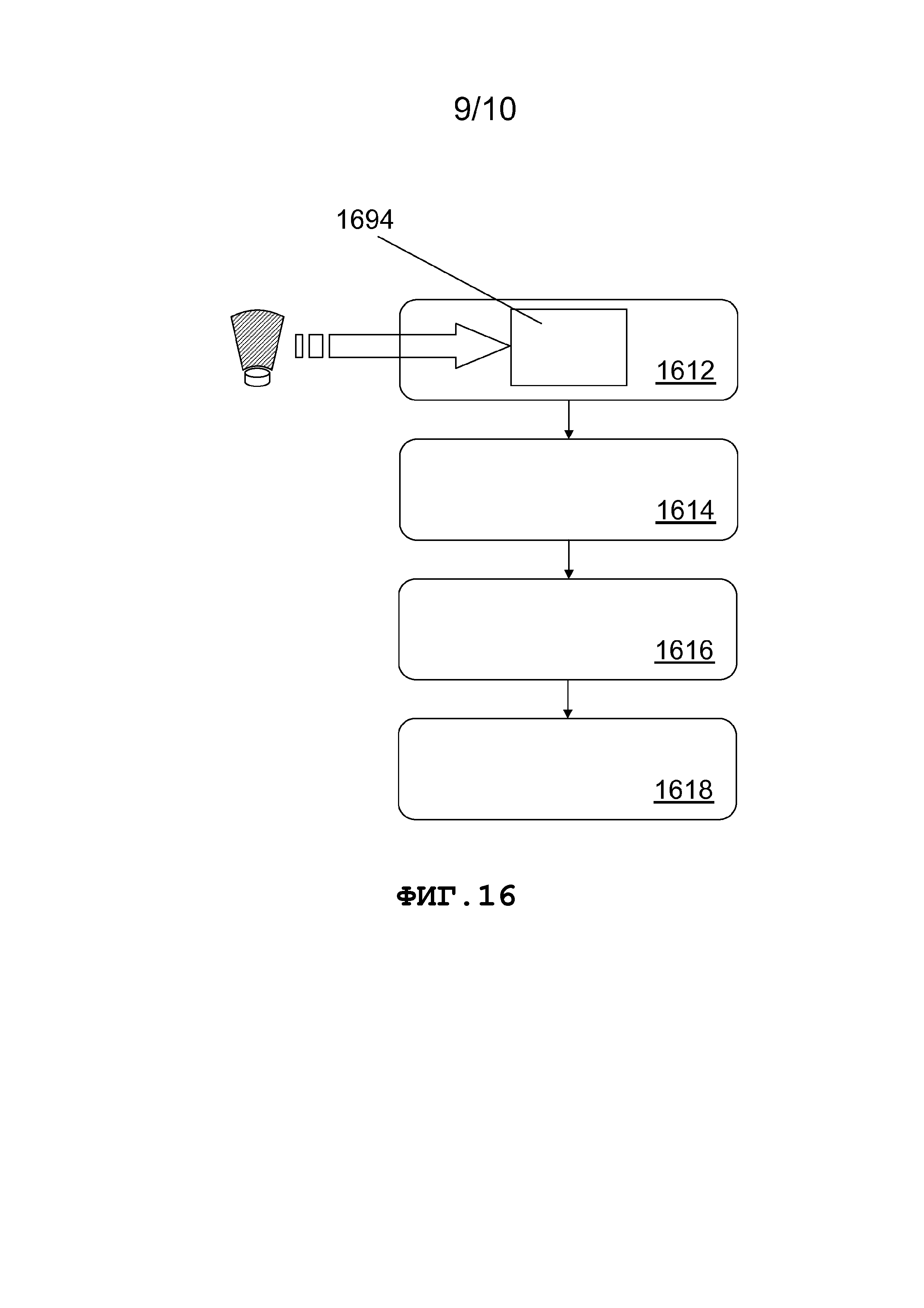
Фиг. 16 - блок-схема алгоритма способа, и
Фиг. 17, 18 показывают графические интерфейсы устройства отображения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже раскрываются варианты осуществления настоящего изобретения.
Фиг. 1 показывает общую систему 100 для получения информации посредством ультразвука, и конкретная изображенная система также применима для выполнения абляции, причем система содержит управляемый источник энергии для предоставления энергии блоку абляции и/или ультразвуковому преобразователю (ни один не показан на этой фигуре). Более того, рукав 30 соединяется с источником энергии, причем рукав имеет на дистальном конце интервенционное устройство 20 в соответствии с вариантом осуществления настоящего изобретения. Интервенционное устройство может включать в себя любое из неисчерпывающего списка, содержащего катетер, иглу, биопсийную иглу или эндоскоп. Также предполагается, что в интервенционном устройстве могло бы содержаться множество ультразвуковых преобразователей, и некоторые ультразвуковые преобразователи могли бы быть только излучающими, тогда как другие преобразователи могли быть только принимающими. Система 100 дополнительно содержит блок управления (CTRL), выполненный с возможностью отправки пакетов 110 ультразвуковой информации в устройство отображения.
Изобретение могло бы использоваться при формировании изображений ткани во время использования, например применительно к аритмии сердца или в онкологии, где полезно получать изображения во время операции, например для оценки риска предстоящего повреждения ткани из-за быстрого высвобождения энергии пузыря, и таким образом создавать основу для принятия решения, как управлять блоком абляции.
Фиг. 2 показывает схематический поперечный разрез катетера 20, который приспособлен для орошаемой абляции с незамкнутым контуром, например радиочастотной абляции, ткани 40, причем катетер 20 имеет дистальный конец 22, то есть правую часть показанного катетера, охваченную скобкой, где дистальный конец содержит абляционный элемент 15, приспособленный для выполнения абляции ткани 40. Отметим, что хотя на фиг. 2 абляционный элемент изображается как охватывающий только переднюю сторону катетера, он также может охватывать катетер сбоку. Излучение для выполнения абляции схематически показано пунктирной стрелкой A1. Необходимая проводка для возбуждения и/или управления абляционным элементом для ясности на этой фигуре не показана. К тому же, предоставляется ирригационное отверстие 21. Ирригационная жидкость вытекает из специального проводника 10 для ирригационной жидкости, например гибкой трубки, что схематически указано сплошной стрелкой A3. Ирригационная жидкость функционирует в качестве среды акустической связи, которую можно определить как среду, практически прозрачную для ультразвуковых волн, например физиологический раствор или вода либо другие аналогичные жидкости, доступные специалисту, реализующему изобретение.
Кроме того, ультразвуковой преобразователь 5 располагается на дистальном конце, при этом преобразователь приспособлен для передачи и/или приема ультразвуковых волн, которые схематически указаны двунаправленной пунктирной стрелкой A2 на фиг. 2. В самом общем виде изобретения ультразвуковой преобразователь располагается позади (как на этой фигуре) или в ирригационном отверстии 21 катетера 20, чтобы позволить ирригационной жидкости A3 вытекать из ирригационного отверстия и чтобы сделать возможным передачу и/или прием ультразвуковых волн через то же ирригационное отверстие 21.
Катетер 20 преимущественно может использоваться для орошаемой радиочастотной (РЧ) абляции с незамкнутым контуром.
На фиг. 2 показан только один ультразвуковой преобразователь 5. Однако могут присутствовать несколько ультразвуковых преобразователей, например ультразвуковой преобразователь переднего обзора, такой как изображенный ультразвуковой преобразователь 5, и один или несколько ультразвуковых преобразователей бокового обзора (не показаны на фиг. 2).
Фиг. 3 показывает вид сбоку (как на фиг. 2) дистального конца 322 интервенционного устройства с ультразвуковым преобразователем 305 переднего обзора и тремя ультразвуковыми преобразователями 306a-c бокового обзора. Все ультразвуковые преобразователи монтируются на стороне интервенционного устройства, но они также могли бы монтировать внутри интервенционного устройства (например, показанного на фиг. 2) или встраиваться в поверхность интервенционного устройства, чтобы поверхность ультразвуковых преобразователей находилась практически заподлицо с поверхностью интервенционного устройства. Три ультразвуковых преобразователя 306a-c бокового обзора монтируются на поверхности интервенционного устройства и выполняются с возможностью излучения и приема ультразвуковых сигналов в/из направления, ортогонального оси длины интервенционного устройства. В этом конкретном варианте осуществления интервенционному устройству соответственно дается возможность получать ультразвуковые сигналы из 4 разных направлений, то есть прямого направления (параллельного оси длины интервенционного устройства) и трех боковых направлений (ортогональных оси длины интервенционного устройства), при этом каждый ультразвуковой преобразователь наклонен приблизительно на 120 градусов вокруг оси длины интервенционного устройства относительно двух других ультразвуковых преобразователей.
Фиг. 4 показывает вид с торца дистального конца 322 интервенционного устройства с ультразвуковым преобразователем 305 переднего обзора и тремя ультразвуковыми преобразователями 306a-c бокового обзора. Вид с торца наблюдается в направлении, которое указано стрелкой 308 на фиг. 3.
Фиг. 5 показывает вид в перспективе дистального конца 322 интервенционного устройства с ультразвуковым преобразователем 305 переднего обзора и тремя ультразвуковыми преобразователями 306a-c бокового обзора.
Фиг. 6 показывает пример изображения 630 в M-режиме. Изображение в M-режиме является изображением, которое составляется путем размещения множества A-линий. A-линия известна в данной области техники и является 1-мерным представлением информации, полученной от каждого ультразвукового преобразователя в некоторый момент времени. Изображение в M-режиме известно в данной области техники и составляется путем размещения множества A-линий, которые собраны в монотонно увеличивающиеся моменты времени рядом друг с другом, чтобы визуализировать изменения со временем. На фиг. 6 A-линии, которые разложены по глубине d, являются вертикальными линиями, помещенными рядом друг с другом, чтобы также дать возможность визуализации развития во времени t. Изображение 630 в M-режиме соответственно показывает глубину d на вертикальной оси и время t на горизонтальной оси. Изображение показывает ассоциированную ткань с анатомической структурой с передней стенкой 632 сердца и задней стенкой 634 сердца. В некий момент времени, время 636 начала, начинается абляционная процедура, и можно увидеть, что вскоре после этого начинается образование повреждения и продвигается к большей глубине со временем. Повреждение наблюдается как относительно шумный сигнал 640, который можно усреднить для получения более гладкого индикатора 642 для продвижения повреждения. Как только повреждение достигло приемлемой глубины, повреждающая процедура прекращается, что указано временем 638 окончания.
Фиг. 7 показывает пример реальных экспериментальных данных из модели овцы со вскрытой грудной клеткой. Радиочастотная энергия доставлялась через эпикард для создания повреждений, которые одновременно отслеживались с помощью изменения ультразвука и электрического импеданса. Ультразвуковые измерения визуализируются на так называемом изображении M в M-режиме. Радиочастотная энергия, рассеянная за интервал времени, равна 9 ватт в течение 20-секундного периода, обозначенного t_a. Глубина ткани на изображении M в M-режиме обозначается d_t. Абсолютная шкала изображения в M-режиме указывается масштабной меткой, обозначенной d1, причем масштабная метка соответствует 1 миллиметру. Сплошная линия, обозначенная p_i, указывает появление растрескивания ткани, пунктирная линия, обозначенная d_o, указывает начало изменений в ультразвуке, которые предшествуют растрескиваниям. Фигура показывает, что изменения в ультразвуковых измерениях можно было обнаружить за несколько секунд до растрескиваний ткани.
Фиг. 8 показывает типовое устройство отображения, которое приняло пакеты ультразвуковой информации от множества ультразвуковых преобразователей, например множества ультразвуковых преобразователей на фиг. 3-5, и где устройство отображения имеет графический интерфейс 850 с пространственно разными областями 841a-c ультразвукового отображения, соответствующими ультразвуковым преобразователям 306a-c на фиг. 3-5, которые также указаны областями 806a-c с пунктирными линиями. Фигура показывает, что относительное пространственное положение разных областей 841a-c ультразвукового отображения совпадает с соответствующими относительными пространственными положениями разных соседних областей образца ткани, которые размещаются перед соответствующими ультразвуковыми преобразователями. В изображенном примере разные области 841a-c ультразвукового отображения показывают изображения в M-режиме, каждое с осью глубины, которая идет радиально наружу, как указано стрелкой 846, и осью времени, которая идет по касательной, как указано изогнутыми стрелками, например стрелкой 848c. В альтернативном варианте осуществления изображения в M-режиме могли бы размещаться так, что отдельные A-линии остаются параллельными (способом, аналогичным изображенному на фиг. 10 примеру). Преимущество наличия параллельных A-линий могло бы состоять в том, что аналогичные разницы во времени представляются аналогичным образом (при изображении) независимо от расстояния до преобразователя. В настоящем примере изображения в M-режиме соответственно строятся во времени по часовой стрелке. Графический интерфейс 850 устройства отображения, кроме того, содержит области, показывающие A-линии (которые изображаются с высокой частотой кадров), например область 842b, и индикаторы контакта с тканью, например область 844b, которые меняют цвет в зависимости от уровня контакта с тканью между ультразвуковым преобразователем и ассоциированной тканью. Графический интерфейс 850 устройства отображения, кроме того, содержит область 852 M-режима, показывающую изображение в M-режиме, полученное ультразвуковым преобразователем переднего обзора, соответствующим ультразвуковому преобразователю 305 на фиг. 3-5 (и также указанную в графическом интерфейсе как область 805), область 856 A-линии, показывающую A-линию, полученную ультразвуковым преобразователем переднего обзора, и область 854 индикатора контакта, которая меняет цвет в зависимости от уровня контакта с тканью между преобразователем переднего обзора и ассоциированным образцом ткани.
Фиг. 9 показывает другое типовое устройство отображения, аналогичное устройству отображения на фиг. 8, с графическим интерфейсом 950 с пространственно разными областями 941a-c ультразвукового отображения, соответствующими ультразвуковым преобразователям, указанным, например, областью 906a. Относительные пространственные положения разных областей 941a-c ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей образца ткани. Как и на фиг. 8, разные области 941a-c ультразвукового отображения показывают изображения в M-режиме, которые вставляются на фиг. 9, каждое с осью глубины, которая идет радиально наружу, как указано стрелкой 946, и осью времени, которая идет по касательной, как указано ориентированными по касательной стрелками, например стрелкой 948c. Область 952 M-режима показывает изображение в M-режиме, полученное ультразвуковым преобразователем переднего обзора, соответствующим ультразвуковому преобразователю 305 на фиг. 3-5. Область 952 M-режима также показана с временем t и глубиной d по осям. Кроме того, в данных, изображенных в области 952 M-режима, обнаружены передняя стенка и задняя стенка ассоциированной ткани с анатомической структурой, и они указываются в виде линии 932 и 934 соответственно. Аналогичным образом линии 960, 962 в области 941b ультразвукового отображения указывают соответственно передние и задние стенки анатомической структуры рядом с ультразвуковым преобразователем, соответствующим 305 на фиг. 3-5.
Отметим также то, что представление пространственно разных областей 941a-c ультразвукового отображения, которые в настоящем примере являются изображениями в M-режиме, в соответствии с изобретением фактически может предоставить новую информацию, потому что наблюдатель может связать признак ткани, наблюдаемый на отдельном изображении, с признаками, наблюдаемыми на других изображениях. Например, линии 960, 962, которые указывают соответственно передние и задние стенки в областях 941b ультразвукового отображения на фиг. 9, можно связать с соответствующими линиями на других изображениях в M-режиме (то есть областями 941a, 941c ультразвукового отображения). Другими словами, возможным преимуществом изобретения может быть то, что наблюдатель может лучше использовать существующую информацию на изображениях (при наличии "контекста" на других изображениях). Другим возможным преимуществом изобретения может быть то, что наблюдателю разрешается "угадать" наличие и/или местоположение признаков на неизображенных областях между изображениями.
Фиг. 10 показывает еще один пример устройства отображения, аналогичного устройству отображения на фиг. 8, с графическими интерфейсами с пространственно разными областями 1041a-c ультразвукового отображения, соответствующими ультразвуковым преобразователям 306a-c на фиг. 3-5. Область 1052 M-режима показывает изображение в M-режиме, полученное ультразвуковым преобразователем переднего обзора, соответствующим ультразвуковому преобразователю 305 на фиг. 3-5, и также показана с временем t и глубиной d по осям. Треугольник 1022 указывает положение наконечника интервенционного устройства 322 на фиг. 3-5 относительно изображенных областей ассоциированного образца ткани.
Фиг. 11 показывает пример графического интерфейса 1150 устройства отображения, который показывает, какой из преобразователей для ультразвукового формирования изображений в интервенционном устройстве, как на фиг. 3-5, находится в хорошем, промежуточном или плохом контакте с тканью. Графический интерфейс 1150 имеет области 1141a-c, которые выполнены с возможностью указания, является ли контакт с тканью между, соответственно, ультразвуковыми преобразователями 306a-c и соседним ассоциированным образцом ткани хорошим (как указано темным окрашиванием области 1141c), промежуточным (как указано темно-серым окрашиванием области 1141a) или плохим (как указано светлым окрашиванием области 1141b). Кроме того, область 1105 посередине выполнена с возможностью указания, является ли контакт с тканью между ультразвуковым преобразователем 305 переднего обзора хорошим, промежуточным или плохим и в настоящем примере указывает, что он является промежуточным.
Фиг. 12 показывает рукоятку 1270 катетера для радиочастотной абляции со встроенным устройством 1251 отображения с графическим интерфейсом, например дисплеем (аналогичным графическому интерфейсу 1150 на фиг. 5), для указания контакта с тканью. Рукоятка соединяется с рукавом 1230, который на своем дистальном конце имеет интервенционное устройство (не показано) с дистальным концом, как на фиг. 3-5. Рукоятка на другом конце имеет кабель 1274 для подачи питания и для соединения с процессором для управления ультразвуковыми преобразователями и для сбора пакетов ультразвуковой информации. Кроме того, рукоятка имеет ручку 1278, которую можно поворачивать (как указано стрелкой 1280) для управления абляционной процедурой. Рукоятка 1270 показана удерживаемой в руке 1276 человека, которая управляет вращением ручки 1278 с помощью большого пальца 1282 и указательного пальца 1284.
Указание контакта с тканью, во-первых, очень важно для формирования успешного абляционного повреждения. Используя ультразвуковой сигнал, можно "наблюдать" контакт с тканью, а используя программно-реализованные алгоритмы оценивать качество контакта между преобразователем для ультразвукового формирования изображений и тканью. Визуальная обратная связь является возможным вариантом для показа клиницисту качества контакта, но также возможна звуковая или тактильная обратная связь.
Во-вторых, алгоритм, который оценивает контакт с тканью, может использоваться для принятия решения, какое ультразвуковое изображение в M-режиме следует заменить или увеличить.
Фиг. 13 показывает систему 1301 обследования для обследования ассоциированного образца 1302 ткани, причем система обследования содержит
- интервенционное устройство 1320, содержащее:
- множество ультразвуковых преобразователей 306a-c, где разные ультразвуковые преобразователи во множестве ультразвуковых преобразователей выполнены с возможностью получения пакетов ультразвуковой информации из пространственно разных соседних областей 1386b-c образца ткани, когда ассоциированный образец ткани размещается рядом с множеством ультразвуковых преобразователей,
- устройство 1351 отображения, выполненное с возможностью приема и визуализации пакетов ультразвуковой информации в пространственно разных областях 1141a-c ультразвукового отображения на устройстве 1351 отображения,
где относительные пространственные положения разных областей ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей 1386b-c образца ткани. Фигура дополнительно показывает рукав 1330, который на своем дистальном конце имеет интервенционное устройство, причем рукав прикреплен проксимальным концом к рукоятке 1370, кабель 1374 для подачи питания и для соединения с процессором 1388 для управления ультразвуковыми преобразователями и для сбора пакетов ультразвуковой информации, причем процессор располагается в устройстве 1351 отображения. Кроме того, фигура показывает соседнюю область 1385 образца ткани, изображаемую ультразвуковым преобразователем 305 переднего обзора.
Фиг. 14, 15 показывают, что относительные пространственные положения разных областей ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей 1386a-c образца ткани.
Фиг. 14 показывает первый набор векторов 1492a-c в системе 1490 координат, которые задают положения разных соседних областей 1386a-c образца ткани, которые изображены с помощью интервенционного устройства, которое изображено на фиг. 3-5.
Фиг. 15 показывает, что относительные пространственные положения разных областей ультразвукового отображения (ссылочные номера не включены для ясности, но фигура показывает графический интерфейс, аналогичный графическому интерфейсу на фиг. 11) совпадают с соответствующими относительными пространственными положениями разных соседних областей 1386a-c образца ткани (на фиг. 14). В частности, можно увидеть, что второй набор векторов 1592a-c в системе 1590 координат аналогичен первому набору векторов, хотя он повернут и масштабирован. Также представляется, что изобретение включает в себя варианты осуществления, где второй набор векторов растянут, например масштабирован по-разному в разных направлениях.
Фиг. 16 - блок-схема алгоритма способа подготовки устройства 1351 отображения и визуализации информации, полученной от множества ультразвуковых преобразователей 306a-c, причем способ содержит:
- получение 1612 первого количества пакетов 1694 ультразвуковой информации, где разные пакеты ультразвуковой информации содержат информацию из пространственно разных соседних областей 1386a-c образца ткани,
- получение 1614 относительных пространственных положений соответствующих разных соседних областей образца ткани,
- определение 1616 второго количества относительных пространственных положений разных областей 1141a-c ультразвукового отображения на устройстве 1351 отображения,
- визуализацию 1618 пакетов ультразвуковой информации в пространственно разных областях 1141a-c ультразвукового отображения,
где первое количество равно второму количеству и где относительные пространственные положения разных областей ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей образца ткани.
Фиг. 17 показывает графический интерфейс 1750 устройства отображения, показывающий пространственно разные области 1741a-c ультразвукового отображения, соответствующие ультразвуковым преобразователям 306a-c на фиг. 3-5, которые также указаны областями 1706a-c с пунктирными линиями. Фигура также показывает второй набор векторов 1792a-c в системе 1790 координат, которые задают положения разных областей 1741a-c ультразвукового отображения, соответствующих разным соседним областям образца ткани, которые изображены с помощью интервенционного устройства, которое изображено на фиг. 14. Отметим, что взаимная ориентация каждой из разных областей ультразвукового отображения вокруг оси через середину области ультразвукового отображения совпадает с взаимной ориентацией соседних областей образца ткани вокруг их соответствующих осей (где каждая ось является осью через центр соответствующей области ультразвукового отображения, и эта ось ортогональна плоскости бумаги).
Фиг. 18 показывает графический интерфейс 1850 устройства отображения, показывающий пространственно разные области 1841a-c ультразвукового отображения. Фигура также показывает второй набор векторов 1792a-c в системе 1790 координат, которые задают положения разных областей 1841a-c ультразвукового отображения. Отметим, что второй набор векторов идентичен второму набору векторов на фиг. 17. Однако отметим, что взаимная ориентация каждой из разных областей ультразвукового отображения вокруг оси через середину области ультразвукового отображения не совпадает с взаимной ориентацией соседних областей образца ткани вокруг их соответствующих осей, в частности, взаимная ориентация области 1841a ультразвукового отображения совпадает с ориентацией соответствующей соседней области образца ткани, взаимная ориентация области 1841b ультразвукового отображения наклонена на 60 градусов по часовой стрелке (как указано стрелкой 1842b) относительно ориентации соответствующей соседней области образца ткани, и взаимная ориентация области 1841c ультразвукового отображения наклонена на 30 градусов по часовой стрелке (как указано стрелкой 1842c) относительно ориентации соответствующей соседней области образца ткани. Вращение каждой области ультразвукового отображения может определяться путем наблюдения вращения в отношении соответствующего вектора положения.
Подводя итог, настоящее изобретение относится к системе 1301 обследования для обследования ассоциированного образца 1302 ткани, где система обследования содержит интервенционное устройство 1320, которое содержит множество ультразвуковых преобразователей 306a-c, и где разные ультразвуковые преобразователи выполнены с возможностью получения изображений разных областей ассоциированного образца ткани, и где система обследования дополнительно содержит устройство 1351 отображения, выполненное с возможностью показа изображений, чтобы каждое из их положений соответствовало соответствующим положениям разных соседних областей образца ткани в ассоциированном образце ткани. Возможным преимуществом системы может быть то, что релевантная информация касательно ассоциированного образца ткани передается наблюдателю быстрым и наглядным образом.
Хотя настоящее изобретение описано применительно к заданным вариантам осуществления, его не следует толковать как каким-либо образом ограниченное представленными примерами. Объем настоящего изобретения устанавливается прилагаемой формулой изобретения. Применительно к формуле изобретения термины "содержащий" или "содержит" не исключают других возможных элементов или этапов. Упоминание в формуле изобретения элементов или этапов в единственном числе не исключает множества таких элементов или этапов. Использование ссылочных номеров в формуле изобретения по отношению к элементам, указанным на чертежах, также не следует трактовать как ограничивающее объем изобретения. Кроме того, отдельные признаки, упомянутые в разных пунктах формулы изобретения, по возможности можно выгодно объединить, и упоминание этих признаков в разных пунктах формулы изобретения не исключает того, что сочетание признаков не является возможным и полезным.
Реферат
Группа изобретений относится к медицинской технике, а именно к средствам обследования с интервенционными устройствами с множеством ультразвуковых преобразователей. Система обследования ассоциированного образца ткани содержит интервенционное устройство, содержащее множество ультразвуковых преобразователей, выполненных с возможностью получения пакетов ультразвуковой информации из пространственно разных соседних областей образца ткани, устройство отображения, выполненное с возможностью приема и визуализации пакетов ультразвуковой информации в пространственно разных областях ультразвукового отображения, при этом относительные пространственные положения разных областей ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей образца ткани и блок обработки, выполненный с возможностью определения пакетов информации о контакте с тканью на основе пакетов ультразвуковой информации, причем пакеты информации о контакте с тканью указывают контакт с тканью между интервенционным устройством и ассоциированным образцом ткани в положениях ультразвуковых преобразователей. Способ подготовки устройства отображения и визуализации информации содержит этапы, на которых получают первое количество пакетов ультразвуковой информации, получают относительные пространственные положения соответствующих разных соседних областей образца ткани, определяют второе количество относительных пространственных положений разных областей ультразвукового отображения на устройстве отображения, визуализируют пакеты ультразвуковой информации в пространственно разных областях ультразвукового отображения, при этом первое количество равно второму количеству и относительные пространственные положения разных областей ультразвукового отображения совпадают с соответствующими относительными пространственными положениями разных соседних областей образца ткани, и определяют пакеты информации о контакте с тканью на основе пакетов ультразвуковой информации. Средство хранения данных содержит компьютерный программный продукт, выполненный с возможностью предоставления возможности компьютерной системе, содержащей по меньшей мере один компьютер, выполнять способ. Система обследования применяется для обследования ассоциированного образца ткани. Использование группы изобретений позволяет расширить арсенал средств обследования. 4 н. и 10 з.п. ф-лы, 18 ил.
Комментарии