Трехмерное ультразвуковое наведение множества инвазивных устройств - RU2644540C2
Код документа: RU2644540C2
Чертежи



Описание
Данное изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к ультразвуковым диагностическим системам визуализации, которые позволяют визуально отображать и управлять введением множества игл для биопсии в реальном времени.
Ультразвуковая визуализация в течение долгого времени использовалась для получения изображения траектории введения игл для биопсии и других инвазивных устройств таким образом, чтобы врач-клиницист мог визуально наблюдать за введением иглы в направлении заданной анатомической области, которая подлежит взятию материала на биопсию. Традиционно это осуществляется с помощью двухмерной (2D) ультразвуковой визуализации и 2D зонда для визуализации, снабженного игольной направляющей. Одна из таких игольных направляющих иллюстрируется в патенте США 6,203,499 (Imling и др.). Назначением указанной игольной направляющей является удерживание иглы согласованно с плоскостью 2D изображения ультразвукового зонда так, что введение указанной иглы происходит непрерывно в пределах данной плоскости, причем она постоянно отображается с помощью указанного ультразвукового зонда. Упомянутая игольная направляющая прикрепляется к зонду таким образом, чтобы отверстие или паз в данной направляющей, через которое вводится игла, находилось в фиксированном соответствии с плоскостью изображения зонда. Это ограничивает введение иглы двумя положениями, с одного конца зонда либо с другого. Врач-клиницист манипулирует зондом, пока заданная анатомическая область не окажется в пределах видимости в плоскости изображения. Тогда врач-клиницист вводит иглу через указанную игольную направляющую под наклоном, который будет содействовать введению кончика иглы в направлении заданной анатомической области и достижению ее. Образец материала из указанной заданной анатомической области затем может быть извлечен через просвет иглы.
Затруднение, которое зачастую встречается в случае игольной биопсии, состоит в постоянном удерживании траектории введения иглы согласованно с плоскостью изображения зонда. Существуют две причины данного затруднения. Одно заключается в том, что зонд необходимо держать неподвижно одной рукой для обеспечения фиксированного положения плоскости изображения, тогда как другой рукой манипулируют и вводят иглу. Другое затруднение представляет собой то, что игла может изгибаться и отклоняться по мере ее введения, а также что игла сталкивается с тканями различной плотности и жесткости по мере ее проникновения в ткани тела. Это может вызвать отклонение иглы от одной плоскости при ее введении. Следовательно, было бы желательно иметь более широкую зону видимости заданной анатомической области и траектории введения иглы, такую как обеспечивает трехмерная (3D) ультразвуковая визуализация. Также было бы желательно иметь возможность введения иглы из множества положений, а не только с концов зонда.
Трехмерная ультразвуковая визуализация предоставит более широкую зону видимости введения иглы. Однако многим врачам-клиницистам не нравятся помехи и часто неоднозначное восприятие глубины при 3D ультразвуковой визуализации. Они предпочитают четкое и простое для понимания двухмерное изображение. Одним из способов пойти навстречу данному пожеланию является применение 3D визуализации с многоплоскостной реконструкцией (МПР). С использованием МПР 3D зонд будет сканировать трехмерный объем впереди зонда, который включает в себя заданную анатомическую область, после чего одна плоскость в указанном объеме выбирается для реконструкции в виде 2D изображения. Это позволяет врачу-клиницисту держать 3D зонд неподвижно и регулировать расположение МПР-плоскости, чтобы приспосабливаться к изменяющейся плоскости введения иглы. К сожалению, практикуется процедура для трех рук: одна рука для того, чтобы держать зонд, еще одна - чтобы вводить иглу, и третья рука для регулирования расположения МПР-плоскости. Было бы желательно усовершенствовать данную процедуру таким образом, чтобы игла непрерывно отображалась в 3D объеме, при том, что одна рука держит зонд, а другая вводит иглу.
В соответствии с принципами настоящего изобретения, диагностическая ультразвуковая система имеет 3D зонд для визуализации с игольной направляющей, которая автоматически выравнивает плоскость отображаемого ультразвукового изображения с плоскостью введения иглы. Игольная направляющая, прикрепленная к зонду для визуализации, производит сигнал, идентифицирующий расположение плоскости введения иглы в области пространства, которая может быть сканирована указанным зондом. Ультразвуковая система создает изображение идентифицированной плоскости, предпочтительно, путем двухпроекционной визуализации, посредством которой сканируется только идентифицированная плоскость или плоскости. В одном варианте осуществления могут быть идентифицированы плоскости введения множества игл, что облегчает использование ультразвуковой системы согласно настоящему изобретению для таких процедур, как радиочастотная абляция с применением множества игл. В другом варианте осуществления могут быть идентифицированы и визуализированы плоскости введения игл с различным наклоном.
На чертежах:
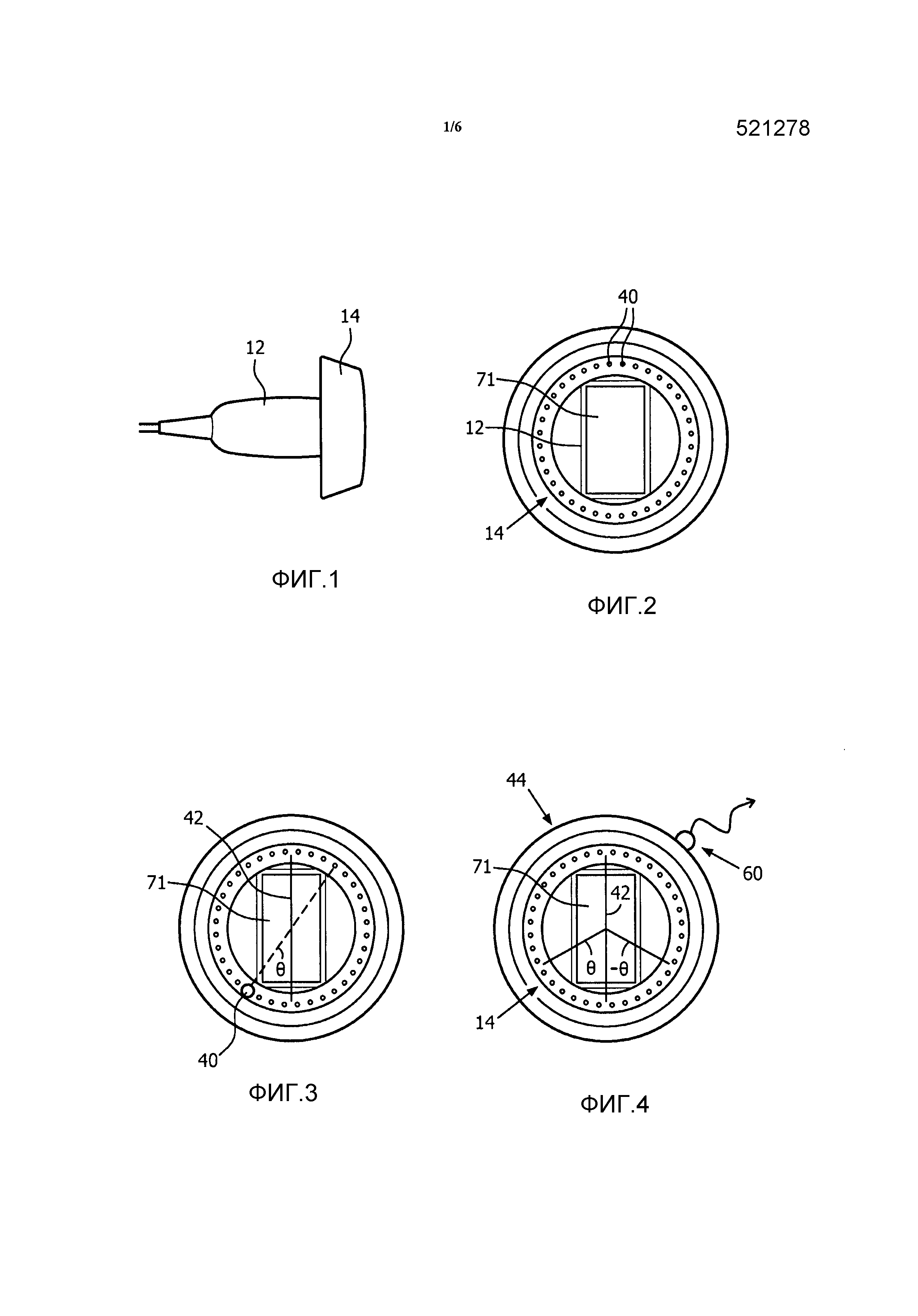
Фиг. 1 иллюстрирует 3D ультразвуковой зонд, который держат за рукоятку зонда, с игольной направляющей согласно настоящему изобретению, прикрепленной к дистальному концу указанного зонда.
На Фиг. 2 изображен фронтальный вид 3D зонда, представленного на Фиг. 1, с игольной направляющей, прикрепленной к дистальному концу указанного зонда и окружающей его.
Фиг. 3 иллюстрирует расположение контрольной плоскости и расположение плоскости введения зонда и игольной направляющей, изображенных на Фиг. 1 и 2.
На Фиг. 4 изображена игольная направляющая, прикрепленная к концу зонда, с окружающим устройством кодирования расположения иглы и беспроводным устройством связи.
Фиг. 5a иллюстрирует игольную направляющую в соответствии с настоящим изобретением, в которой используется оптическое устройство кодирования расположения иглы.
Фиг. 5b иллюстрирует игольную направляющую в соответствии с настоящим изобретением, в которой используется резистивное устройство кодирования расположения иглы.
На Фиг. 6 изображена взаимная зависимость между плоскостью введения иглы и расположением двух проекций, в которой указанная плоскость введения находится в зависимости от области пространства, которая может быть сканирована 3D зондом для визуализации.
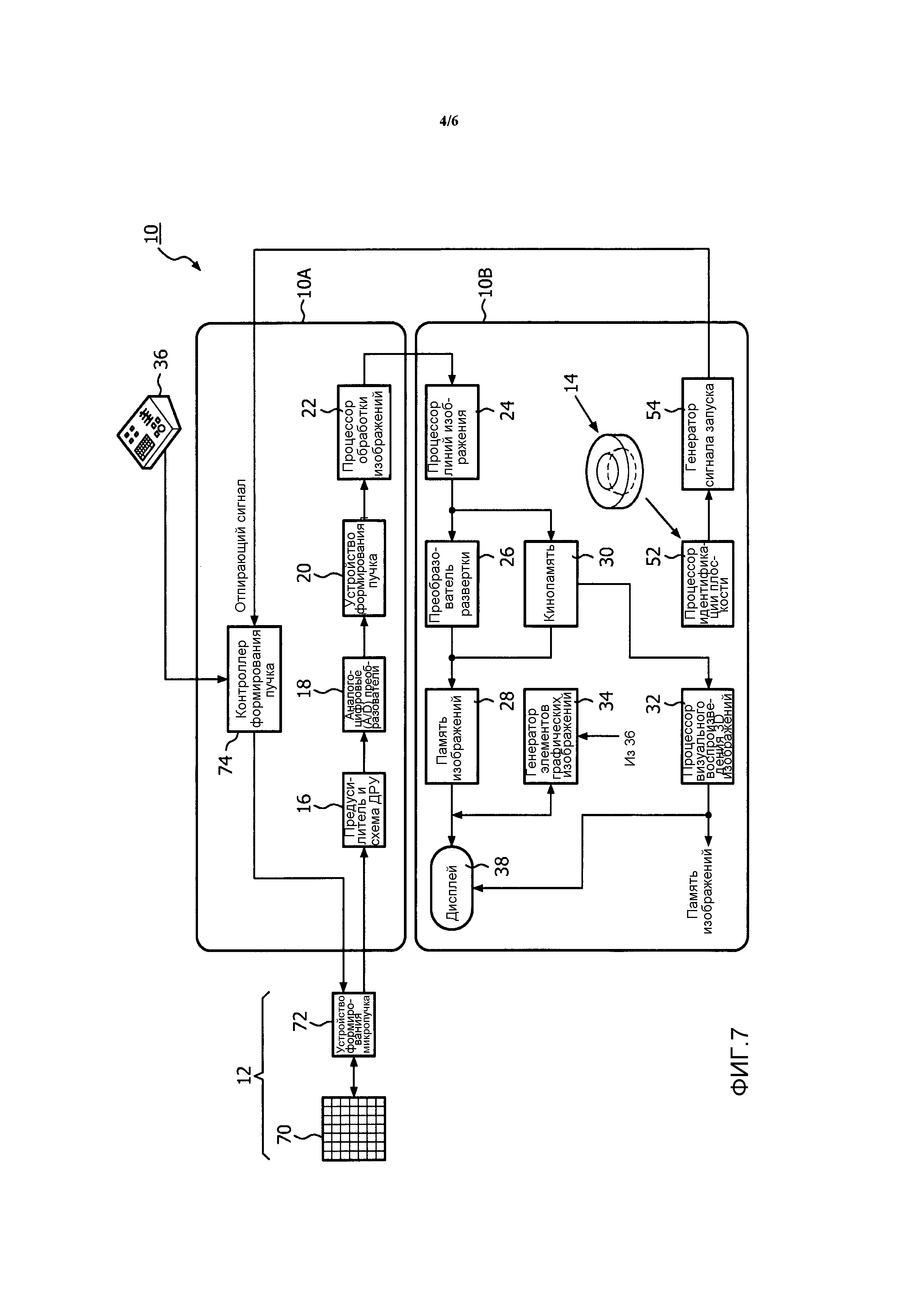
На Фиг. 7 изображена в виде блок-схемы ультразвуковая система с игольной направляющей, выполненной в соответствии с принципами настоящего изобретения.
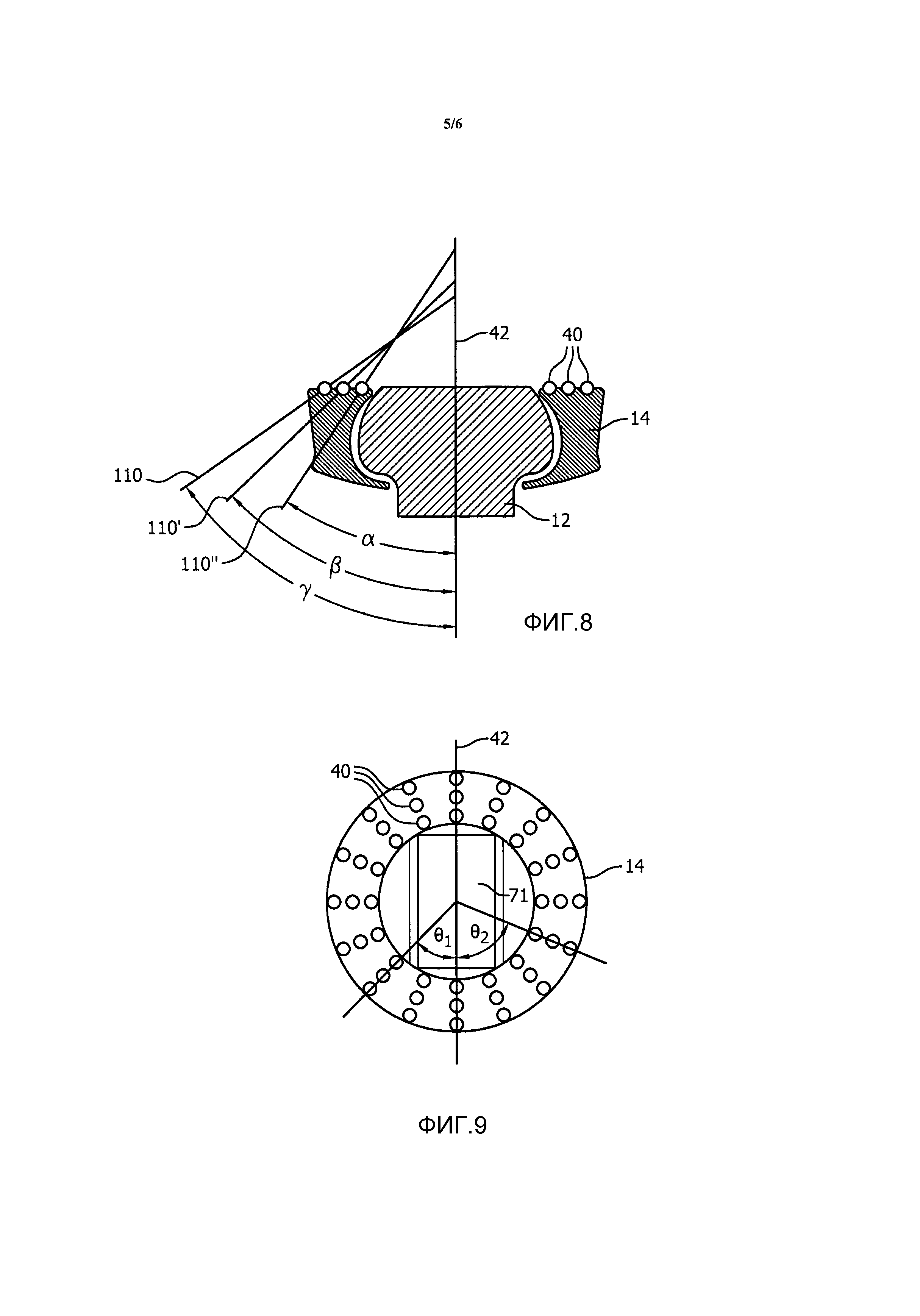
Фиг. 8 и 9 иллюстрируют игольную направляющую согласно настоящему изобретению со множеством углов наклона для введения иглы.
Фиг. 10 иллюстрирует ультразвуковое отображение множества игл, которые использовались для процедуры микроволновой абляции.
Прежде всего, что касается Фиг. 1, изображен 3D ультразвуковой зонд 12 для визуализации, который держат за его проксимальный конец (к которому крепится кабель), с игольной направляющей 14 согласно настоящему изобретению, прикрепленной к дистальному концу (акустическому окну) указанного зонда. Игольная направляющая 14 фиксируется к зонду с неизменной ориентацией путем выравнивания с отличительным признаком данного зонда, таким как его метка ориентации зонда. Метка ориентации зонда представляет собой признак, обычно расположенный на боковой стороне дистального конца зонда, который используется врачом-клиницистом для соотнесения ориентации зонда на объекте к ориентации анатомической области на ультразвуковом изображении. Например, см. патент США 5,255,682 (Pawluskiewicz и др.). В выполняемом варианте осуществления зонд 12 имеет метку ориентации в виде выступа, выровненного с совмещаемым пазом во внутренней окружности игольной направляющей, в связи с чем обеспечивается возможность прикрепления игольной направляющей к зонду только с одной известной ориентацией. В случае надлежащего прикрепления передняя поверхность игольной направляющей выравнивается с передней поверхностью линзы 71 зонда, как изображено на виде сверху передней поверхности обоих компонентов на Фиг. 2. Иллюстрируемая игольная направляющая представляет собой кольцеобразную структуру с рядом отверстий 40, расположенных под наклоном вокруг указанной направляющей. Данные отверстия немного больше размера иглы, вместе с которой подлежит использовать указанную направляющую, достаточно малы для того, чтобы ограничивать траекторию введения иглы, при этом достаточно велики для того, чтобы врач-клиницист имел возможность двигать и направлять иглу по мере ее введения. В случае иллюстрируемой игольной направляющей по окружности кольцеобразной направляющей располагаются тридцать шесть отверстий 40, расположенных с равными интервалами, по одному через каждые 10°. Данные отверстия расположены под наклоном таким образом, что траектория вводимой иглы направлена под линзу 71 и проходит внутрь апертуры зонда. В иллюстрируемом варианте осуществления указанные отверстия наклонены под углом 20° относительно оси, перпендикулярной к передней поверхности линзы зонда. Зонд 12 представляет собой 3D зонд для визуализации, который, предпочтительно, имеет двухмерную матрицу преобразовательных элементов, с помощью которой пирамидальный или трапециевидный объем впереди линзы может сканироваться путем наведения электронного пучка. Механически сканирующие 3D зонды также могут применяться. По мере того как игла направляется внутрь объекта с помощью игольной направляющей, ее траектория введения направляется внутрь области пространства, изображение которой может быть получено с помощью 3D зонда 12. Фиг. 3 иллюстрирует контрольную плоскость 42, выступающую под прямым углом к передней поверхности линзы 71 и ортогональную к концам 2D матричного зонда. На данном чертеже изображено отверстие 40 (увеличенное в иллюстративных целях), через которое игла может вводиться по траектории введения на плоскости изображения зонда, расположенной под углом θ относительно контрольной плоскости 42.
На Фиг. 4 изображена игольная направляющая 14 с ротационным устройством 44 кодирования, которое идентифицирует расположение отверстия вокруг направляющей, через которое вводится игла. При введении иглы через отверстие в направляющей 14, соответствующее положению восемь часов на Фиг. 4, указанное устройство кодирования распознает плоскость сканирования в положении θ относительно контрольной плоскости 42, в котором траектория введения иглы может быть отображена. Если игла вводится через отверстие в положении четырех часов, например, указанное устройство кодирования распознает плоскость сканирования в положении - θ, в котором траектория введения может быть отображена. Распознаваемая плоскость сканирования сообщается с ультразвуковой системой, управляющей зондом, посредством либо проводного соединения, либо беспроводного соединения, такого как устройство 60 коммуникационной связи Bluetooth. Электропитание для устройства кодирования может обеспечиваться с помощью либо проводного соединения, либо аккумуляторной батареи 62.
Устройство кодирования может быть выполнено несколькими способами. Один из способов состоит в использовании оптического кодирования, как изображено на Фиг. 5a. В данном варианте осуществления имеется ряд световых излучателей, таких как светодиоды 46, которые направляют свет через отверстия 40 на приемники света с другой стороны отверстий. При введении иглы сквозь конкретное отверстие указанная игла заблокирует прохождение света к приемнику, соответствующему данному отверстию, и тогда сигнал указанного приемника идентифицирует данное конкретное отверстие и его соответственную плоскость сканирования как отверстие, через которое вводится игла. Ультразвуковой зонд и ультразвуковая система затем сформируют изображение распознанной плоскости сканирования и иглы, вводимой в данную плоскость. Как изображено на Фиг. 5a, при введении иглы сквозь отверстие 40, соответствующее положению игольной направляющей восемь часов, сигнал оптического приемника идентифицирует плоскость θ сканирования как плоскость траектории введения иглы.
Другой вариант осуществления устройства кодирования, в котором используется резистивное устройство кодирования, изображен на Фиг. 5b. В данном варианте осуществления устройство 44 кодирования имеет внешнее контактное кольцо с одним или несколькими отверстиями или канавками 84, через которые может быть введена игла. Указанное внешнее контактное кольцо 58 может вращаться вокруг внутреннего кольца 56, которое имеет резистивный контур 48 по окружности указанного кольца. Внешнее контактное кольцо имеет скользящий контакт 82 в известной взаимной зависимости с положением отверстия или канавки 84 внешнего контактного кольца 58, который находится в электрическом контакте с указанным резистивным контуром 48. Указанные скользящий контакт и резистивный контур, тем самым, работают как потенциометр таким образом, что электрическое измерение между «+» и «-» терминалами, электрически соединенными со скользящим контактом 82 и концом резистивного контура, идентифицирует положение отверстия или канавки по окружности указанной кольцеобразной структуры. Данная информация о положении сообщается в ультразвуковую систему для идентификации плоскости траектории введения иглы, подлежащей сканированию с помощью зонда и ультразвуковой системы. Множество отверстий или канавок могут быть индивидуально идентифицированы путем подключения дополнительного сопротивления последовательно с соответствующим терминалом, так что диапазон значений сопротивления, сообщаемый для одного отверстия, не перекрывает диапазон значений сопротивления для других.
На Фиг. 6 изображена иллюстрация взаимной зависимости между 3D зондом 12 для визуализации, объемом 100, который может быть сканирован с помощью указанного зонда, и выбранной плоскостью 102 сканирования, в которой находится поле 104 изображения указанного зонда. При введении иглы 110 через отверстие или канавку в игольной направляющей 14 игла ограничивается траекторией, которая оказывается в поле зрения ниже акустического окна зонда. Поскольку указанный зонд является 3D зондом для визуализации, он выполнен с возможностью сканирования ориентации многочисленных плоскостей в объеме 100. Ротационное устройство кодирования игольной направляющей 14 идентифицирует конкретное отверстие, через которое вводится игла, что соответствует конкретной ориентации 102 плоскости сканирования, изображение которой может быть получено посредством 3D зонда для визуализации. Затем зонд 12 формирует изображение идентифицированной ориентации плоскости сканирования, как иллюстрируется с помощью области 104 секторного сканирования в плоскости 102. Потом врач-клиницист может следить за продвижением иглы 110, по мере ее введения по траектории введения в области 104 секторного сканирования, до тех пор, пока кончик 112 иглы не достигнет заданной анатомической области.
Фиг. 7 иллюстрирует ультразвуковой зонд, игольную направляющую и ультразвуковую систему, выполненные в соответствии с принципами настоящего изобретения. Ультразвуковая система 10 сконфигурирована посредством двух подсистем, подсистемы 10A первоначального сбора данных и подсистемы 10B отображения. К подсистеме сбора данных подсоединяется 3D ультразвуковой зонд 12, в состав которого входят двухмерный матричный датчик 70 и устройство 72 формирования микропучка. Указанное устройство формирования микропучка содержит электронные схемы, которые управляют сигналами, подаваемыми группам элементов («пэтчи») матричного датчика 70, и выполняет некоторую обработку эхо-сигналов, получаемых элементами каждой группы. Формирование микропучка в зонде успешно снижает количество токопроводящих жил в кабеле между указанным зондом и ультразвуковой системой, что описывается в патентах США 5,997,479 (Savord и др.) и 6,436,048 (Pesque), и обеспечивает электронное управление пучками при передаче и приеме для 2D или 3D визуализации в реальном времени (прямой визуализации) с высокой частотой передачи кадров.
Зонд 12 соединен с подсистемой 10A сбора данных ультразвуковой системы. Указанная подсистема сбора данных включает в себя контроллер 74 формирования пучка, которым легко управлять с помощью пользовательского устройства 36 управления и, для настоящего изобретения, отпирающего сигнала, который предоставляет сигналы управления в устройство 72 формирования микропучка, посылая зонду команды в отношении тайминга, частоты, направления и фокусировки передачи и приема лучей и плоскости или плоскостей, подлежащих сканированию этими пучками. Указанный контроллер формирования пучка также управляет системным формированием пучка эхо-сигналов, получаемых подсистемой сбора данных, посредством ее контроля аналого-цифровых (A/D) преобразователей 18 и устройства 20 формирования пучка. Частично сформированные в пучок эхо-сигналы, полученные от зонда, усиливаются с помощью предусилителя и схемы 16 ДРУ (дифференциальной регулировки усиления) в подсистеме сбора данных, после этого преобразовываются в цифровую форму посредством A/D преобразователей 18. Оцифрованные эхо-сигналы затем формируются в полностью управляемые и сфокусированные пучки с помощью главного системного устройства 20 формирования пучка. Указанные эхо-сигналы далее обрабатываются процессором 22 обработки изображений, который выполняет цифровую фильтрацию, распознавание режимов B и M и обработку данных по доплеровской частоте, а также может выполнять другую обработку сигналов, такую как разделение гармоник, понижение уровня спеклов и другую необходимую обработку сигнала изображения.
Эхо-сигналы, выработанные подсистемой 10A сбора данных, поступают в подсистему 10B отображения, которая обрабатывает указанные эхо-сигналы для отображения в желаемом формате изображения. Эхо-сигналы обрабатываются с помощью процессора 24 линий изображения, который выполнен с возможностью осуществлять выборку эхо-сигналов, соединять сегменты пучков в полные линейные сигналы, а также усреднять линейные сигналы для улучшения отношения сигнал-помеха или потокового послесвечения. Развертка линий изображения для 2D изображения преобразуется в желаемый формат изображения с помощью преобразователя 26 развертки, который выполняет конвертирование азимута и дальности (R-theta), как известно в данной области техники. Указанный преобразователь развертки может, таким образом, задавать прямолинейный или секторный форматы изображения. Затем изображение сохраняется в памяти 28 изображений, из которой оно может быть отображено на дисплее 38. На указанное изображение в памяти также накладываются графические данные, подлежащие отображению вместе с данным изображением, которые генерируются генератором 34 элементов графических изображений, которым легко управлять с помощью пользовательского устройства 36 управления, так что создаваемые графические данные соотносятся с изображениями на дисплее. Индивидуальные изображения или последовательности изображений могут храниться в кинопамяти 30 во время съемки повторов изображений или их последовательностей.
Для пространственной визуализации в реальном времени подсистема 10B отображения также включает в себя процессор 32 визуального воспроизведения 3D изображений, который получает линии изображения от процессора 24 линий изображения для визуального воспроизведения трехмерных изображений в реальном времени. 3D изображения могут отображаться как прямые (в реальном времени) 3D изображения на дисплее 38 либо отправляться в память 28 изображений для хранения пакетов 3D данных для более позднего рассмотрения и постановки диагноза.
В соответствии с настоящим изобретением сигнал идентификации плоскости сканирования, производимый игольной направляющей 14, который идентифицирует плоскость сканирования, в которой игла, вводимая через указанную игольную направляющую, будет проходить и может быть отображена, поступает в процессор 52 идентификации плоскости. Сигнал идентификации плоскости, создаваемый указанным процессором 52 идентификации плоскости, поступает в генератор 54 сигнала запуска, который создает отпирающий сигнал, дающий команду контроллеру 74 формирования пучка управлять сканированием заданной плоскости сканирования, в каждой из которых располагается траектория введения иглы. Контроллер 74 формирования пучка управляет устройством 72 формирования микропучка для сканирования заданной плоскости сканирования и производит эхо-сигналы от сканирования указанной заданной плоскости, которые частично формируются в пучок посредством указанного устройства формирования микропучка и отправляются в системное устройство 20 формирования пучка для завершения формирования пучка строк развертки в заданной плоскости. Указанные строки развертки данной плоскости обрабатываются с помощью процессора 24 линий изображения, и их развертка преобразуется в двухмерное изображение идентифицированной плоскости, которое отображается на дисплее 38. Указанная идентифицированная плоскость сканирования может быть отображена как единственная тонкая плоскость в пределах разрешающей способности зонда и системы, но также может быть отображена как сектор изображения большой толщины, которая больше толщины единственной тонкой плоскости, как описывается в публикации патента США номер US 2010/0168580 A1 (Thiele и др.). Применение визуализации секторов большой ширины дает возможность непрерывного визуального представления иглы на изображении, даже в случае если ее траектория введения отклоняется от идеально прямой линии, при условии, что указанная траектория остается в пределах толщины указанного сектора изображения большой ширины.
Фиг. 8 и 9 иллюстрируют другую игольную направляющую согласно настоящему изобретению, через которую иглы 110 могут быть введены под различными углами α, β и γ наклона. Вид в поперечном сечении, изображенный на Фиг. 8, иллюстрирует три иглы 110, 110' и 110ʺ, введенные через различные отверстия 40 игольной направляющей, которая направляет указанные иглы по траекториям введения, расположенные под наклоном под углами γ, β и α соответственно. Каждая группа из трех отверстий в конкретном угловом положении по окружности указанной направляющей будет направлять данные иглы по траектории введения в одной и той же плоскости сканирования, две из которых, θ1 и θ2, изображены на Фиг. 9, в зависимости от центральной контрольной плоскости 42. Игольная направляющая 14, изображенная на Фиг. 8 и 9, дает возможность врачу-клиницисту получать доступ к заданной анатомической области на различной глубине ниже зонда при идентификации плоскости сканирования каждой траектории введения.
В случае данной инвазивной процедуры может потребоваться осуществить доступ к анатомической области в теле с помощью нескольких инвазивных инструментов одновременно. Как иллюстрируют Фиг. 4 и 9, множество игл могут быть введены в одно и то же время в различных идентифицированных плоскостях сканирования θ1 и θ2, или +θ и -θ, например. При использовании двух траекторий введения через направляющую указанная направляющая сообщит идентификационные характеристики двух различных ориентаций плоскостей сканирования в процессор идентификации плоскости, который заставит ультразвуковую систему 10 поочередно сканировать различные плоскости. Два разных инструмента могут применяться для микроволновой абляции заданной анатомической области, например, и в данном случае, врач-клиницист захочет визуально наводить обе абляционные иглы на заданную цель, так чтобы их кончики находились в контакте с анатомической областью, подлежащей абляции. Фиг. 10 иллюстрирует ультразвуковой дисплей, на котором отображаются четыре различных изображения инвазивной процедуры с использованием игольной направляющей согласно настоящему изобретению. В данном примере три различные иглы 110α, 110β и 110γ применялись и отображаются одновременно. Игла 110α отображена на ультразвуковом изображении 202 плоскости сканирования траектории введения иглы 110α, и граница 202a данного изображения окрашена в уникальный цвет, например синий, для различения изображения иглы 110α. Идентификация и окрашивание иглы на ультразвуковом изображении могут выполняться посредством техники сегментации, которая определенно идентифицирует данную иглу на изображении из окружающей ее ткани, как описывается в публикации патента США номер 2004/0002653 (Greppi и др.) и в статье «Улучшение визуальной различимости иглы при чрескожных процедурах, управляемых ультразвуком» («Enhancement of Needle Visibility in Ultrasound-guided Percutaneous Procedures», S.Cheung и др., Ultrasound in Med. & Biol., том 30, номер 5(2004), стр. 617-24), например. Аналогично, иглы 110β и 110γ отображены на соответствующих 2D изображениях 204 и 206 их траекторий введения и обозначены специфическими цветами 204a и 206a, например красным и желтым. Изображение 201 является полным 3D волюметрическим изображением участка данной процедуры, которое иллюстрирует заданную анатомическую область, в которую доступ осуществлен с помощью всех трех игл. На 3D изображении каждая игла окрашена в свой специфический цвет, синий, красный или желтый, так что врач-клиницист может с легкостью соотнести каждую из игл на 3D изображении с ее собственным 2D изображением плоскости введения. Каждая плоскость 2D изображения и полный 3D объем сканируется с временным уплотнением, при этом индивидуальные плоскости введения сканируются с большей частотой повторения (и, следовательно, кадровой частотой дисплея в реальном времени), чем указанное 3D изображение. Как только иглы достигают их требуемых положений в заданной анатомической области, индивидуальные 2D изображения могут быть зафиксированы на экране, так что время сбора данных полностью посвящается формированию 3D изображения, и процедура в заданной анатомической области может продолжаться с целью получения прямого изображения в 3D.
Практическая реализация игольной направляющей и ультразвуковой системы в соответствии с настоящим изобретением может сопровождаться использованием других направляющих, чтобы помочь врачу-клиницисту планировать и проводить процедуру введения иглы, например, путем направления врача-клинициста при введении иглы с целью избежать твердых тканей и опасных анатомических областей, как описывается в заявке на патент США номер 61/587,784, поданной 18 января 2012 г. и озаглавленной «Ультразвуковой контроль направления траектории иглы во время биопсии» («ULTRASONIC GUIDANCE OF A NIDDLE PATH DURING BIOPSY», Kudavelly и др.). Избегание твердых тканей в траектории введения может помочь предотвратить отклонение и изгибание иглы во время введения. Помощь данного наведения может быть использована для планирования траектории введения до начала процедуры либо для осуществления наведения по мере того, как вводится игла.
Реферат
Изобретение относится к медицинской технике и применяется для визуализации игл при биопсии. Ультразвуковая система содержит: 3D ультразвуковой зонд для визуализации, включающий в себя двумерный матричный датчик; игольную направляющую, присоединяющуюся к зонду для визуализации с заранее заданной ориентацией относительно зонда для визуализации. Игольная направляющая имеет множество положений введения иглы для направления множества игл для введения внутрь области пространства за счет различных плоскостей введения иглы, так что первая плоскость введения иглы и вторая плоскость введения иглы плоскостей введения иглы ориентированы под различными углами относительно контрольной плоскости изображения, ортогональной концам двумерного матричного датчика. Ультразвуковая система соединена с зондом и выполнена с возможностью управления 3D ультразвуковым зондом для визуализации для формирования множества 2D изображений, одновременно образованных из плоскостей изображения, соответствующих различным плоскостям введения иглы. Использование изобретения позволяет обеспечить более широкую зону введения иглы. 14 з.п. ф-лы, 11 ил.
Комментарии