Ультразвуковое управление траекторией иглы во время биопсии - RU2638621C2
Код документа: RU2638621C2
Чертежи



Описание
Настоящее изобретение относится к медицинским диагностическим системам получения изображений и, в частности, к диагностическим ультразвуковым системам, обеспечивающим визуальное направление иглы во время биопсии или другой инвазивной процедуры.
Биопсия является медицинской процедурой, содержащей взятие клеток или тканей для исследования. Процедура содержит медицинское взятие ткани из живого организма для определения наличия или степени болезни. Взятая ткань обычно исследуется под микроскопом патологоанатомом и может быть также проанализирована химически для определения состояния болезни. Когда удаляется весь объем или подозреваемая область, процедура называется эксцизионной биопсией. Когда берется только образец ткани с сохранением гистологической архитектуры клеток ткани, процедура называется инцизионной биопсией или корневой биопсией. Когда образец ткани или текучей среды берется с помощью иглы таким образом, что при этом клетки не сохраняют гистологическую архитектуру клеток ткани, процедура называется биопсией с аспирацией иглы.
Чтобы эффективно ввести иглу непосредственно в целевую ткань, предпочтительно выполнять процедуру с помощью диагностического средства получения изображения, такого как ультразвуковое устройство получения изображения. Врач может определить местоположение целевой ткани на изображении и затем ввести иглу в соответствии с плоскостью изображения. Затем врач может наблюдать за иглой по мере ее введения и уверенно направлять иглу до тех пор, пока кончик иглы не достигнет целевой ткани. Проба целевой ткани затем берется или изымается через иглу. Для большей простоты и точности процедура может также использовать хирургическую навигационную систему, такую как направляющая система Philips PercuNav. Система PercuNav создает ненаправленное модулированное магнитное поле вокруг и через место процедуры. Датчики располагаются на игле и на ультразвуковом зонде для получения изображения, так что система может определять положение и ориентацию пациента, место проведения хирургической операции, иглы и плоскости получения ультразвукового изображения в трехмерном пространстве. Система PercuNav может затем помогать при более точном отображении иглы и наконечника иглы в ультразвуковом изображении и их положения и ориентации относительно плоскости изображения. Врач может указать целевую ткань на ультразвуковом изображении, и система PercuNav будет графически указывать на дисплее траекторию, по которой должна следовать игла, чтобы достигнуть целевой ткани.
Однако трудности нацеливания на опухоль все еще существуют, поскольку плоскость ультразвукового изображения и игла для биопсии остаются копланарными на протяжении всей процедуры, чтобы отображать реальное положение наконечника иглы. Кроме того, система Philips PercuNav не будет предлагать наилучшую траекторию для введения, которая обеспечивает наименьшее сопротивление введению и избегает близлежащих чувствительных органов. Во многих случаях игла будет деформироваться и изгибаться по мере того, как во время введения она встречает жесткую или плотную ткань. В результате, эффективность процедуры биопсии снижается, поскольку часто бывает очень трудно интерпретировать траекторию иглы, особенно при введении иглы на большие глубины, при которых могут потребоваться многочисленные повторные введения. Все вышеупомянутые трудности приводят в результате к дополнительному времени на многочисленные повторные введения иглы для биопсии с повышением неудобства для пациента и заболеваемости. Соответственно, для системы получения изображения желательно предсказывать наиболее благоприятную траекторию введения иглы, чтобы уменьшить возможность варьирования технологии и ненужного травмирования пациента. Это приведет к более коротким срокам обучения процедурам биопсии, уменьшению времени процедуры и позволит иметь совместимые повторяющиеся процедуры биопсии, снижая тем самым дискомфорт для пациента и улучшая результаты.
В соответствии с принципами настоящего изобретения, обеспечивается ультразвуковая система получения изображения для управления процедурами введения иглы. Ультразвуковой зонд создает для процедуры изображения целевой ткани и ткани, через которую вводится игла, чтобы получить доступ к целевой ткани. Когда введение началось, информация пикселей ультразвукового эха собирается и анализируется, чтобы определить локальные изменения плотности ткани вместе с проектируемой траекторией. Если анализ показывает, что вдоль намеченной траектории встретится область плотной ткани, собирают и анализируют данные о плотности ткани вдоль других возможных траекторий и альтернативный путь прохождения представляется для рассмотрения врачу. Врач может выбрать траекторию, наиболее эффективную для процедуры и наиболее удобную для пациента.
НА ЧЕРТЕЖАХ:
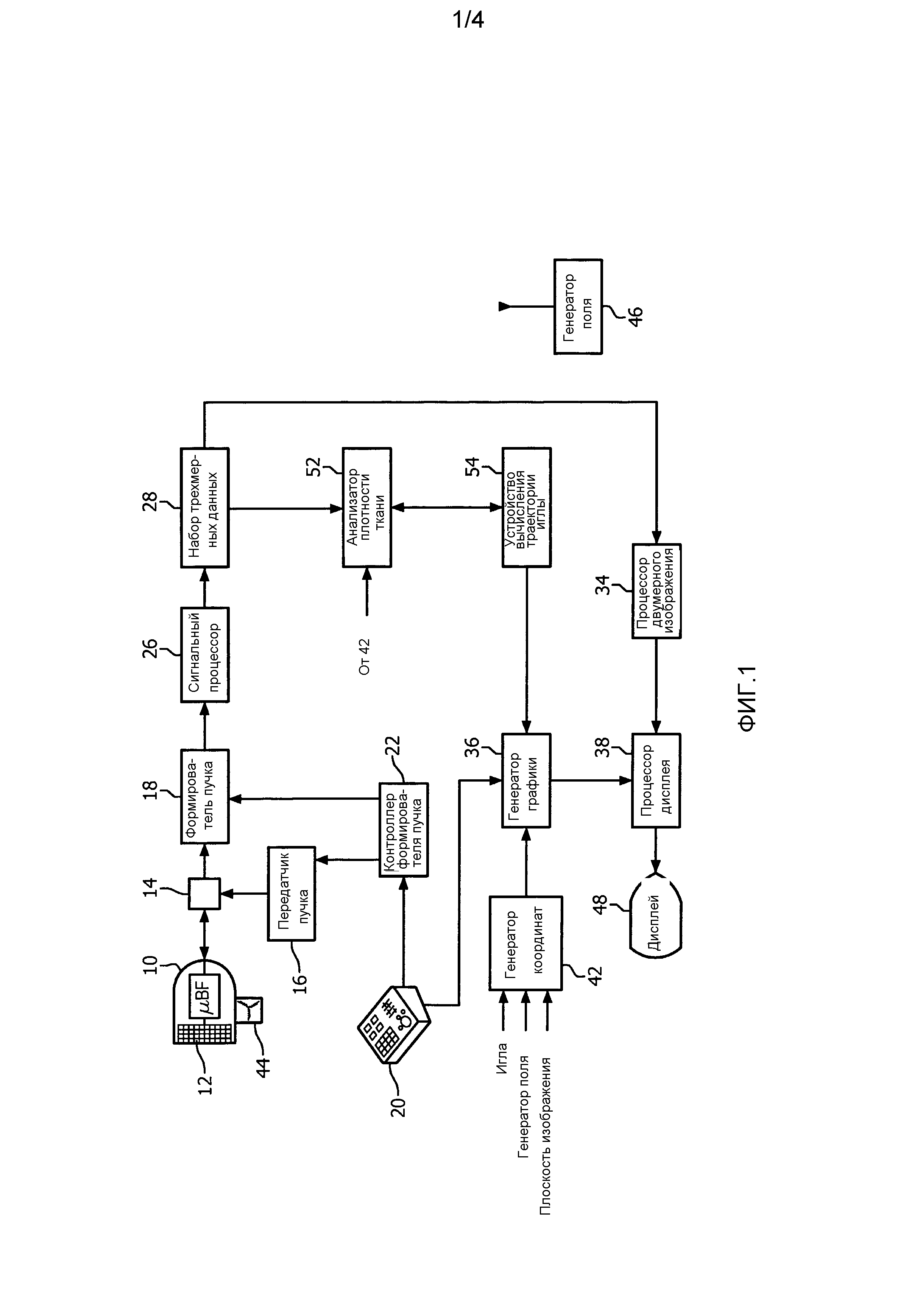
Фиг. 1 - блок-схема системы получения ультразвукового изображения для направления иглы, выполненной в соответствии с принципами настоящего изобретения.
Фиг. 2 - столбец пикселей вдоль проектируемой траектории иглы для биопсии.
Фиг. 3 - ультразвуковой зонд, получающий изображение целевой ткани и ткани и с помощью которого получают доступ к мишени в теле.
Фиг. 4 - расположение иглы при процедуре биопсии и спроектированная траектория.
Фиг. 5 - состояние получения изображения для показанного на Фиг. 4 расположения с указанием плотности ткани вдоль спроектированной траектории.
Фиг. 6 - состояние получения изображения показанной на Фиг. 4 плотной анатомической структуры на спроектированной траектории иглы.
Фиг. 7 - состояние получения изображения показанной на Фиг. 6 структуры с предложенными альтернативными траекториями.
Обратимся сначала к Фиг. 1, где в форме блок-схемы показана система получения ультразвукового изображения для оказания помощи при направлении иглы, в которой ультразвуковой зонд содержит матричный преобразователь 12 для сканирования и получения изображения области, расположенной перед преобразователем. Матрица преобразователя может быть одномерной (1D) матрицей для сканирования плоскости перед зондом, но предпочтительно преобразователь является преобразователем 12 с двумерной матрицей, которая передает электронно направляемые и сфокусированные пучки через объемную область и принимает одиночный или многочисленные пучки в ответ на каждый переданный пучок. С помощью двумерной матрицы 12 зонд может сканировать плоскость изображения или ткань с любой верхней стороны плоскости изображения. Группы соседствующих элементов матрицы преобразователя, упоминаемые как "пэтчи" или "субматрицы", в совокупности действуют посредством микроформирователя пучка (μBF), расположенного в зонде 12, выполняющем частичное формирование принятых эхо-сигналов и снижающем, таким образом, количество проводников в кабеле между зондом и основной ультразвуковой системой. Две подходящие матрицы описаны в патенте США # 6,419,633 (Robinson и др.) и в патенте США 6,368,281 (Solomon и др.). Микроформирователи пучка описаны в патентах США 5,997,479 (Savord и др.) и 6,013,032 (Savord). Характеристики передающего пучка матрицы управляются передатчиком 16 пучка, который заставляет аподизированные элементы апертуры матрицы излучать сфокусированный пучок желаемой ширины в желаемом направлении через объемную область тела. Передаваемые импульсы направляются от передатчика 16 пучка к элементам матрицы посредством переключателя 14 передачи-приема. Эхо-сигналы, принятые элементами матрицы и частично сформированные микроформирователем пучка в ответ на пучок передачи, передаются на формирователь 18 пучка системы, где частично сформированный пучок эхо-сигналов, принятых элементами матрицы и частично сформированных микроформирователем пучка в ответ на пучок передачи, передается на формирователь 18 пучка системы, где частично сформированные в пучок эхо-сигналы обрабатываются, чтобы сформировать полностью сформированный одиночный пучок или многочисленные приемные пучки в ответ на пучок передачи. Подходящий для этой цели формирователь пучка описан в упомянутом выше патенте Savord 6,013,032.
Приемные пучки, сформированные формирователем 18 пучка, подаются на сигнальный процессор 12, выполняющий такие функции, как фильтрация и квадратурная демодуляция. Эхо-сигналы, соответствующие приемным пучкам, обнаруживаются и обрабатываются в последовательности пикселей вдоль каждого пучка, которые сохраняются как трехмерный набор 28 данных. Ультразвуковое изображение в режиме В обычно формируется пикселями в диапазоне значений шкалы серого, которые пропорциональны мощности принятых эхо-сигналов. Кровь и очень мягкая ткань будут отражать относительно слабые эхо-сигналы, которые создают относительно низкие значения шкалы серого, представляемые как более темные оттенки изображения в режиме В. Кровь в кровеносном сосуде будет воспроизводиться как темная, почти черная тень. Но твердые и плотные субстанции, такие как твердые кисты, плотная ткань и зеркальные отражатели, будут отражать относительно мощные эхо-сигналы. Пиксели с относительно высокими пиксельными значениями отображаются яркими, почти белыми пикселями. Границы между различными типами тканей, такие как границы органов, также будут отражать мощные эхо-сигналы, которые отображаются как яркие пиксели. Таким образом, значения пикселей являются индикаторами локальных плотностей тканей и границ органов.
Пиксели плоскости сканированного объема передаются на процессор 34 двумерного изображения, где они обрабатываются, чтобы сформировать двумерное ультразвуковое изображение плоскости сканирования объема. Технология формирования двумерного изображения из набора трехмерных данных широко известна как мультипланарное переформатирование (MPR). Технология MPR направляет значения данных изображений, находящихся в общей плоскости, которые должны затем обрабатываться, для формирования двумерного изображения выбранной плоскости.
Альтернативно, плоскость сканированного объема может сканироваться отдельно, перемежающимся во времени способом, как описано в патенте США # 6,497,663 (Fraser и др.), что может привести в результате к двумерному изображению с повышенной частотой кадров. Панель 20 управления, посредством которой врач управляет работой ультразвуковой системы, содержит устройства управления, с помощью которых врач выбирает и позиционирует плоскость MPR или сканированного двумерного изображения. Плоскость двумерного изображения обычно выравнивается с центром двумерного матричного преобразователя, что предпочтительно означает, что области по обе стороны плоскости изображения сканируются, чтобы получить значения пикселей в плоскости изображения и с любой ее стороны в направлении по высоте. Однако плоскость, которая смещена от центра преобразователя, также может использоваться в соответствии с настоящим изобретением, и плоскость может быть ортогональной преобразователю или быть наклонена под неортогональным углом к матрице преобразователя. Обработанное двумерное изображение передается процессору дисплея, где оно накладывается на графику, поступающую от генератора 36 графики, и затем отображается на дисплее 48 изображений.
Описанная выше ультразвуковая система может использоваться с такой навигационной системой, как PercuNav, элементы которой показаны на Фиг. 1. Система PercuNav имеет генератор 46 поля, излучающий электромагнитное поле, проникающее через место проведения процедуры и окружающее пространство. Датчики 44 располагаются на зонде 10, игле для биопсии (не показана) и пациенте (не показан) и взаимодействуют с электромагнитным полем и создают сигналы, используемые для вычисления положения и ориентации двумерной плоскости изображения зонда, иглы для биопсии и наконечника иглы и пациента. Это вычисление делается генератором 42 координат системы PercuNav, который показан как принимающий сигналы от иглы и плоскости изображения, а также связанный с генератором поля для целей регистрации поля.
Информация о координатах иглы и плоскости изображения передается на генератор 36 графики, который в ответ на это и в ответ на сигналы управления от панели 20 управления, как описано выше, создает графику траектории иглы.
В соответствии с принципами настоящего изобретения, обеспечивается анализатор 52 плотности ткани, принимающий данные пикселей набора 28 трехмерных данных. Используя информацию о координатах проектируемой траектории введения иглы от генератора 42 координат, анализатор плотности ткани выбирает и анализирует пиксели вдоль проектируемой траектории иглы.
Все эти пиксели могут находиться в одной и той же плоскости, такой как плоскость двумерного изображения, созданная процессором 34 двумерного изображения. Предпочтительно пиксели являются трехмерным набором пикселей (вокселов) набора трехмерных данных, как показано на Фиг. 2. На этом чертеже показана группа 3x3xN пикселей, где N - количество пикселей, занимающих несколько или все расстояния между наконечником 62 иглы 60 в направлении D. В этом примере наконечник иглы выравнивается с центральным столбцом этой группы пикселей, которая выровнена с проектируемой траекторией иглы.
Этот центральный столбец во всех направлениях окружен восьмью соседними столбцами пикселей. Таким образом, каждая группа пикселей в плоскости x-y содержит центральный пиксель на проектируемой траектории иглы и пиксели из пространства, окружающего траекторию. Хотя может использоваться одиночный столбец пикселей, предпочтительна трехмерная группа, поскольку она берет выборки траектории иглы и пространства пикселей вокруг траектории. В этом примере анализатор 52 плотности ткани усредняет или суммирует значения девяти пикселей в каждой плоскости x-y и создает значение, представляющее плотность ткани на расстоянии D группы вдоль траектории иглы. Например, если в заданной пиксельной плоскости существует плотная, сильно отражающая анатомия, значение объединенных пикселей в этом месте вдоль траектории будет относительно высоким, указывая на плотную субстанцию, которая может затруднять введение иглы. Граница органа вдоль траектории также будет обычно отражать более мощные эхо-сигналы. Если местоположение содержит только мягкую ткань, объединенное значение будет относительно низким, указывая на субстанцию пониженной плотности, через которую должна легко проникать игла. Последовательность оценок плотности, вычисленная таким образом в направлении D, направляется на устройство 54 вычисления траектории иглы. Анализатор плотности ткани также выполняет эту операцию для возможных траекторий иглы, соседних с проектируемой траекторией иглы. Например, вычисление может проводиться для другой группы пикселей с теми же самыми координатами y и D, но с другой координатой x, измененной на три, указывая схожую группу 3x3xN пикселей, непосредственно соседствующую с первой. Последовательность оценок плотности вычисляется подобным образом для этой соседней группы пикселей. Соседняя, но не параллельная группа, может направляться, используя дискретно изменяемые другие координаты x вдоль направления D, которые должны обеспечивать оценку плотности для возможной траектории введения, соседнюю, но не параллельную с начальной проектируемой траекторией. Когда устройство 54 вычисления траектории иглы принимает последовательные оценки плотности для проектируемой траектории и нескольких альтернативных соседних траекторий, оно может выбрать одну из них, которая предлагает наименее опасную и наименее стойкую к введению иглы траекторию. Например, устройство вычисления траектории иглы может выбрать последовательность плотностей с наименьшей пиковой плотностью. Или устройство вычисления траектории может суммировать или усреднить последовательные значения плотности для каждой траектории и выбрать одну из них с наименьшей объединенной или средней плотностью. Координаты одной или более альтернативных траекторий, которые были идентифицированы как более благоприятные для введения иглы, затем передаются на генератор графики для индикации отображаемого изображения.
Процедура, проведенная в соответствии с настоящим изобретением, может быть продолжена следующим образом. Врач держит ультразвуковой зонд 30 для получения изображения за ручку 40 и помещает дистальный конец 32 зонда, содержащий матрицу преобразователя, в контакт с поверхностью 80 тела. При акустическом контакте с кожей установленный зонд будет получать изображение внутренности тела, как показано двумерной секторной областью 84, которая изображена как содержащая ультразвуковое изображение. Область тела, для которой получают изображение, содержит целевую ткань 86, из которой должна браться биопсия. Врач манипулирует устройствами управления с целевыми значками на панели 20 управления, чтобы расположить цель графически поверх целевой ткани в изображении, как показано кружком 92 на Фиг. 4. Навигационная система идентифицирует положение кружка в изображении 84 и, используя координаты положения и ориентацию иглы в электромагнитном поле, создает на ультразвуковом изображении графику 90, прогнозирующую траекторию введения иглы 60. Как показано на Фиг. 4, проектируемая траектория иглы в этом примере графически идентифицируется точечной линией 90, соответствующей игле 60 и целевой графике 92. Когда врач продолжает введение иглы в этой ориентации, траектория иглы будет следовать точечной линии 90, пока не достигнет целевой ткани, идентифицированной целевой графикой 90.
Когда спроектированная траектория иглы идентифицирована точечной линией 90, анализатор 52 плотности ткани может получить доступ к пикселям вдоль спроектированной траектории и проанализировать их для определения плотности ткани вдоль траектории. В примере, показанном на Фиг. 5, устройство вычисления траектории иглы заставляет последовательность оценок плотности вдоль траектории графически отображаться в виде кривой 94 относительно нулевой линии отсчета. В этом примере кривая 94 показывает плотность ткани, которая должна быть относительно низкой и, по существу, однородной от малой глубины до целевой ткани 86, где твердая масса целевой ткани вызывает значительное увеличение по кривой 94 плотности. Врач может быть удовлетворен этими характеристиками ткани вдоль проектируемой траектории введения и может затем вводить иглу вдоль точечной линии 90, чтобы произвести биопсию массы 86.
На Фиг. 6 показана другая ситуация, в которой на траектории введения иглы существует полутвердая масса 88, такая как киста. Когда анализатор плотности ткани и устройство вычисления траектории иглы формируют кривую для этой траектории введения, кривая 94 выглядит как имеющая второй пик 95, указывающий повышенную плотность на траектории, созданную кистой 88. В этом примере врач решает, что траектория введения, предложенная точечной линий 90, неприемлема и просит систему предложить более желательную траекторию введения. Врач использует устройства управления на панели 20 управления, которые заставляют анализатор плотности ткани и устройство вычисления траектории иглы итеративно идентифицировать, анализировать и предлагать альтернативные траектории введения, как описано выше. В этом примере устройство вычисления траектории иглы нашло и идентифицировало две альтернативные траектории, которые графически указываются пунктирными линиями 97 и 99 на ультразвуковом изображении. Предложенная траектория 97 введения слегка наклонена влево от текущей траектории 90 введения, и предложенная траектория 99 введения расположена справа от текущей траектории введения, и доступ к ней осуществляется с другой стороны зонда 30. Когда врач продвигает или повторно вводит наконечник иглы в соответствии с одной из этих альтернативных траекторий введения, система навигации заставляет точечную линию 90 перемещаться в соответствии с предложенной траекторией и кривая 94 плотности будет изменяться и отображать плотность вдоль вновь выстроенной траектории. Врач может затем выбрать траекторию введения, которая считается наиболее подходящей для выполнения процедуры биопсии.
Хотя приведенные выше примеры показывают отображение кривой 94 плотности ткани, отображение кривой может отсутствовать в предложенном варианте осуществления. В этом случае система будет только показывать альтернативные траектории введения. Другая возможная реализация состоит в показе плотности ткани вдоль траектории вставки посредством числового значения, такого как усредненное, или пиковое, или среднее значение последовательности значений плотности. Еще одной возможностью является исключение предложенных линий 97 и 99 введения и просто показ кривой или значения плотности точечной траектории введения в соответствии с иглой, по мере того как игла перемещается в различные возможные положения введения. Врач может также предпочесть использовать направитель иглы, чтобы помочь в направлении введения иглы. По мере введения иглы система может контролировать траекторию введения, сравнивать ее с рекомендованной траекторией введения и рекомендовать врачу, следовать ли предписанной траектории или варьировать введение относительно предписанной траектории. Другие отклонения от описанных выше примеров будут легко понятны специалистам в данной области.
Реферат
Изобретение относится к медицинской технике, а именно к ультразвуковой диагностике. Система получения изображения, визуально направляющая введение инвазивного устройства, содержит ультразвуковой зонд, имеющий матричный преобразователь для получения изображения области ткани, содержащей целевую ткань, и создания принимаемых сигналов, ультразвуковую систему, обрабатывающую сигналы, принятые ультразвуковым зондом, для создания набора пространственно идентифицированных пикселей, имеющих значения пикселей, пропорциональные принятым сигналам, процессор изображения, реагирующий на значения пикселей, который создает ультразвуковое изображение, дисплей, отображающий ультразвуковое изображение, анализатор плотности ткани, реагирующий на значения пикселей, который создает оценку плотности ткани, основываясь на пространственно идентифицированных пикселях, соответствующих траектории введения инвазивного устройства, причем дисплей выполнен с дополнительной возможностью отображения оценки плотности ткани с помощью чисел или в виде кривой относительной плотности ткани вдоль траектории введения инвазивного устройства. Использование изобретения позволяет снизить травмирование пациента за счёт формирования наиболее благоприятной траектории введения иглы. 12 з.п. ф-лы, 7 ил.
Комментарии