Ультразвуковая система визуализации и способ для процедуры наведения по изображению - RU2654608C2
Код документа: RU2654608C2
Чертежи

Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к ультразвуковой системе визуализации и к способу обеспечения ультразвукового изображения с информацией о сосуде, в частности для использования в процедуре наведения по изображению. Настоящее изобретение дополнительно относится к компьютерной программе для реализации такого способа.
УРОВЕНЬ ТЕХНИКИ
В трехмерной (3D) ультразвуковой визуализации, также называемой объемной визуализацией, получение трехмерного изображения выполняется путем проведения множества двухмерных (2D) сканирований, которые нарезают слоями интересующий объем в анатомической области. Следовательно, получается множество двухмерных изображений, которые расположены одно за другим. Это множество двухмерных изображений вместе формирует трехмерный объем данных. Путем надлежащей обработки изображения из трехмерного объема данных может быть создано трехмерное изображение интересующего объема. Трехмерное изображение может быть затем выведено в надлежащей форме на дисплей для пользователя системы ультразвуковой визуализации.
Ультразвуковая визуализация обычно используется для отображения введения, использования или работы инвазивного медицинского устройства или инструмента внутри тела. Например, тонкоигольная аспирационная биопсия (FNA), толстоигольная биопсия, радиочастотная абляция (RFA) и чрескожная инъекция этанола (PEI) являются процедурами, которые требуют введения в тело пациента инвазивного медицинского устройства. Такая процедура, использующая ультразвуковую визуализацию, обычно упоминается как процедура наведения по ультразвуковому изображению. Выполняя такую процедуру наведения по изображению, доктор должен иметь возможность визуализировать цель (например, карциному, которая будет удалена при радиочастотной абляции) в анатомической области, инвазивное медицинское устройство (например, иглу), приближающееся к цели, и любые сосуды, окружающие цель, в частности кровеносные сосуды (также называемые сосудистой сетью). Визуализация сосудов является ключевой для того, чтобы гарантировать, что ни один из важных сосудов не будет проколот во время введения и наведения инвазивного медицинского устройства. Следовательно, доктор или клинический врач обычно полагается на использование наведения по ультразвуковому изображению для того, чтобы ввести инвазивное медицинское устройство, такое как игла для биопсии или абляционный зонд, в тело пациента, как для диагностики, так и для лечения. Наведение по ультразвуковому изображению является важным, потому что оно помогает доктору или клиническому врачу визуализировать и, следовательно, планировать путь продвижения инвазивного медицинского устройства от кожи до цели (например, до целевого поражения), избегая по ходу продвижения кровеносных сосудов.
Большая часть наведения по ультразвуковому изображению производится в двухмерном B-режиме (режим ультрасонографии с кодированием интенсивности принятых эхо-сигналов в виде яркости свечения точек дисплея). Главная причина этого в том, что в двухмерном ультразвуковом B-режиме обеспечиваются высокие частоты кадров. B-режим обычно относится к режиму работы, в котором дисплей показывает полутоновое изображение, представляющее 2-мерное распределение амплитуды обратного рассеяния ультразвука от одной плоскости или среза цели, которая формируется путем обнаружения обратных эхо-сигналов для каждой из серий линий получения в плоскости изображения (обычно один импульс излучения на линию). При этом очень критичным является уменьшение задержек между тем, что показывается на дисплее, и тем, что фактически происходит с инвазивным медицинским устройством (например, иглой) в теле пациента. Малая частота кадров и соответственные задержки обратной связи в виде ультразвукового изображения могут привести к тому, что инвазивное медицинское устройство (например, игла) не попадет в намеченную анатомическую область. Это может ограничить использование для процедуры наведения по ультразвуковому изображению любых методов визуализации потоков, которые требуют получения многих событий импульс-эхо на одну линию визуализации, таких как, например, цветная визуализация потоков, называемая также цветной допплеровской визуализацией. С другой стороны, визуализация потоков обеспечивает намного более качественное очерчивание границ сосуда, чем один только B-режим. В частности, трехмерная визуализация потоков была бы хорошим способом для того, чтобы гарантировать, что сосуды не лежат на пути инвазивного медицинского устройства (например, иглы), поскольку в двухмерной визуализации видна только единственная плоскость, и обычно очень трудно все время удерживать инвазивное медицинское устройство в плоскости изображения. Однако, частоты кадров в трехмерной визуализации, и особенно в трехмерной визуализации потоков, обычно создают еще большие угрозы, чем в двухмерной визуализации.
Патентная заявка США US 2011/0263985 A1 описывает систему ультразвуковой визуализации для одновременного создания цветной допплеровской визуализации иглы и кровотока в сосудах. Для этого создается изображение B-режима интересующей анатомической области. Первый набор допплеровских данных изображения, оптимизированных для визуализации сосудистого кровотока, создается вдоль одного пути обработки допплеровского изображения. Второй набор допплеровских данных изображения, оптимизированных для визуализации иглы или другого инвазивного устройства, создается вдоль другого, параллельного пути обработки допплеровского изображения. Цветное допплеровское изображение создается, а затем отображается путем объединения некоторых или всех изображений B-режима, первых допплеровских данных изображения и вторых допплеровских данных изображения на основе множества выбираемых пользователем режимов.
Такая система ультразвуковой визуализации одновременно использует ультразвуковую визуализацию в B-режиме и цветную допплеровскую визуализацию. Это уменьшает частоту кадров. Следовательно, существует потребность в увеличении или обеспечении достаточной частоты кадров в процедурах наведения по ультразвуковому изображению.
Патентный документ EP 2160978 A1 раскрывает устройство для отслеживания перемещения инородного объекта внутри субъекта, имеющее рентгеновскую флюороскопическую систему с рентгеновским детектором и ультразвуковую систему, которая имеет ультразвуковой датчик с датчиком положения. Дисплей выполнен с возможностью отображения статического рентгеновского изображения, полученного рентгеновской флюороскопической системой, и ультразвукового изображения реального времени, полученного ультразвуковой системой.
Публикация Porter et al.: "Three-Dimensional Registration and Fusion of Ultrasound and MRI Using Major Vessels as Fiducial Markers" in IEEE Transactions on Medical Imaging, Vol. 20, No. 4, 1 April 2001 раскрывает объединение наборов данных трехмерного ультразвукового изображения и изображения магнитно-резонансной томографии без помощи внешних координатных меток или внешних датчиков положения. Объединение этих двух режимов комбинирует трехмерное ультразвуковое сканирование мягких тканей в реальном времени с большей анатомической основой ЯМР.
Патентный документ US 2006/0020204 A1 раскрывает систему и способ для управления визуализацией трехмерного пространства, в котором были получены различные изображения сканирования по существу реального времени. Пользователь может визуализировать изображения части тела или объекта, полученные из сканера по существу реального времени, не только как двухмерные изображения, но как позиционно и ориентационно привязанные срезы внутри конкретного трехмерного пространства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение улучшенной системы ультразвуковой визуализации, в частности, с увеличенной или достаточной частотой кадров. Дополнительной задачей настоящего изобретения является обеспечение улучшенного способа для обеспечения ультразвукового изображения с информацией о сосуде, в частности, с увеличенной или достаточной частотой кадров, а также соответствующей компьютерной программы для реализации такого способа.
В первом аспекте настоящего изобретения представлена система ультразвуковой визуализации, которая включает в себя ультразвуковой датчик, имеющий матрицу измерительных преобразователей, выполненную с возможностью обеспечивать ультразвуковой сигнал приема, блок обработки объема B-режима, выполненный с возможностью генерировать объем B-режима на основе ультразвукового сигнала приема, блок обработки изображений B-режима, выполненный с возможностью обеспечения текущего изображения B-режима на основе объема B-режима, блок сегментации сосуда, выполненный с возможностью создания трехмерной карты сосудов путем выполнения способа сегментации сосуда, память, выполненную с возможностью хранения предварительно полученной трехмерной карты сосудов, блок совмещения, выполненный с возможностью совмещать ранее полученную трехмерную карту сосудов с объемом B-режима и выбирать часть трехмерной карты сосудов, соответствующую текущему изображению B-режима, а также дисплей, выполненный с возможностью отображения ультразвукового изображения, основанного на текущем изображении B-режима и выбранной части трехмерной карты сосудов, и блок обработки изображений, выполненный с возможностью наложения текущего изображения B-режима и выбранной части трехмерной карты сосудов для того, чтобы обеспечить ультразвуковое изображение. Таким образом генерируется и отображается ультразвуковое изображение с наложенной на него информацией о сосуде.
В дополнительном аспекте настоящего изобретения представлен способ обеспечения на ультразвуковом изображении информации о сосуде, включающий в себя: получение ультразвукового сигнала, обеспечиваемого ультразвуковым датчиком, имеющим матрицу измерительных преобразователей, формирование объема B-режима на основе полученного ультразвукового сигнала, обеспечение текущего изображения B-режима на основе объема B-режима, создание трехмерной карты сосудов путем выполнения методики сегментации сосуда, совмещение с объемом B-режима ранее полученной трехмерной карты сосудов, сохраненной в памяти, выбор части трехмерной карты сосудов, соответствующей текущему изображению B-режима, и обеспечение ультразвукового изображения на основе текущего изображения B-режима и выбранной части трехмерной карты сосудов, и наложение текущего изображения B-режима и выбранной части трехмерной карты сосудов для того, чтобы обеспечить ультразвуковое изображение путем обработки изображений.
В дополнительном аспекте настоящего изобретения представлена компьютерная программа, включающая в себя средства кода программы для того, чтобы предписать компьютеру выполнять этапы такого способа при выполнении упомянутой компьютерной программы на компьютере.
Можно предположить, что приемлемые частоты кадров (или объемную скорость) имеет объемный B-режим, также называемый трехмерным B-режимом, но не одновременно трехмерный B-режим и трехмерная цветная визуализация потоков. Настоящее изобретение может обеспечить способ иметь преимущества как трехмерного B-режима, так и трехмерного цветного потока при частотах кадров трехмерного B-режима.
Основная идея настоящего изобретения состоит в том, чтобы получить или создать трехмерную карту сосудов в самом начале или перед процедурой наведения по ультразвуковому изображению. После этого эта трехмерная карта сосудов совмещается с объемом B-режима. Предпочтительно трехмерная карта сосудов обновляется, когда происходит процедура наведения по ультразвуковому изображению. В частности, трехмерная карта сосудов получается и сохраняется в памяти на первом этапе. Поскольку трехмерная карта сосудов получается в начале процедуры наведения по ультразвуковому изображению, до фактической вставки инвазивного медицинского устройства (например, иглу) в тело пациента, можно потратить время на то, чтобы получить трехмерную карту сосудов с максимально возможным качеством. Во время процедуры наведения по ультразвуковому изображению трехмерная карта сосудов совмещается и предпочтительно отслеживается (то есть ее совмещение непрерывно обновляется) с текущим или живым изображением B-режима (например, двухмерным или трехмерным изображением). Частоты кадров во время получения трехмерной карты сосудов могут быть небольшими, но поскольку трехмерная карта сосудов получается в начале или перед процедурой наведения по ультразвуковому изображению, это не влияет на частоту кадров во время самой процедуры наведения по ультразвуковому изображению, использующей визуализацию B-режима. Таким образом, поскольку получение текущего или живого ультразвукового изображения использует только B-режим, могут быть достигнуты высокие частоты кадров, обеспечивающие визуализацию в реальном времени. Кроме того, доктор или пользователь может видеть информацию о сосуде (например, контуры сосуда), наложенную на изображение B-режима, что помогает избежать повреждения сосудов во время процедуры наведения по изображению. Следовательно, настоящее изобретение обеспечивает высокую частоту кадров, в частности, необходимую для процедур наведения по изображению, использующих инвазивное медицинское устройство (например, иглу), позволяя при этом использовать трехмерную карту сосудов или ее соответствующую информацию о сосуде для того, чтобы выделить на ультразвуковом изображении те области, которых следует избегать.
Предпочтительные варианты осуществления настоящего изобретения определяются в зависимых пунктах формулы изобретения. Следует понимать, что предлагаемый способ или компьютерная программа имеют аналогичные и/или идентичные варианты осуществления, что и предлагаемая система ультразвуковой визуализации, как это определено в зависимых пунктах формулы изобретения.
В одном варианте осуществления текущее изображение B-режима является двухмерным изображением, изображением ортогональных двухмерных плоскостей изображения или трехмерным изображением. Даже при том, что формируется объем B-режима, то есть трехмерные данные, фактическое представление или отображение данных на дисплее могут отличаться. Например, система может отобразить только двухмерное изображение или срез этого объема любым подходящим способом (например, в виде обычного двухмерного изображения или в виде ортогональных двухмерных плоскостей изображения). Когда текущее изображение B-режима (подлежащее отображению) является двухмерным изображением или трехмерным изображением ортогональных двухмерных плоскостей изображения (например, преобразованным в соответствии с алгоритмом многоплоскостного объемного переформатирования (MPR)), обеспечивается более легкое представление ультразвукового изображения по сравнению с трехмерным представлением. Альтернативно, текущее изображение B-режима (подлежащее отображению) также может быть, конечно, трехмерным изображением, которое предоставляет пользователю максимальную информацию и таким образом увеличивает производительность системы.
В другом варианте осуществления часть является двухмерным срезом трехмерной карты сосудов. Этот вариант осуществления используется в частности тогда, когда текущее изображение B-режима является двухмерным изображением или изображением ортогональных двухмерных плоскостей изображения. Если объем B-режима разделяется на срезы для получения двухмерного среза или двухмерного изображения для отображения, трехмерная карта сосудов также может быть разделена на срезы тем же самым образом.
В альтернативном варианте осуществления часть является трехмерной частью трехмерной карты сосудов. Этот вариант осуществления, в частности, используется тогда, когда текущее изображение B-режима является трехмерным изображением. Если должно быть отображено трехмерное изображение, трехмерная карта сосудов также может быть наложена на него таким же образом. Например, трехмерное изображение B-режима может быть полупрозрачным для того, чтобы сделать видимой трехмерную карту сосудов (например, в цвете).
Информация о сосуде или часть трехмерной карты сосудов непосредственно накладываются на ультразвуковое изображение или включается в него. Это улучшает удобочитаемость информации для пользователя системы (например, доктора или клинического врача), например, во время процедуры наведения по изображению. Таким образом обеспечивается весьма понятное интуитивно (или наиболее интуитивно понятное) отображение.
В альтернативном варианте осуществления система ультразвуковой визуализации включает в себя блок обработки изображений, выполненный с возможностью добавлять текущее изображение B-режима и выбранную часть трехмерной карты сосудов, находящиеся рядом друг с другом, для того, чтобы снабдить ультразвуковое изображение информацией о сосуде. Таким образом, ультразвуковое изображение обеспечивается путем параллельного представления текущего (или живого) изображения B-режима и выбранной части трехмерной карты сосудов. Например, текущее (или живое) изображение B-режима представляется как первая часть изображения на правой стороне дисплея, а выбранная часть трехмерной карты сосудов представляется во второй части изображения на левой стороне дисплея. Выбранная часть трехмерной карты сосудов или информация о сосуде могут, например, находиться в полученном ранее совмещенном изображении (например, цветном изображении). Например, выбранная часть трехмерной карты сосудов может быть представлена или может содержаться в компьютерно-томографических данных, или в данных магнитного резонанса, или в ультразвуковом изображении.
В другом варианте осуществления система ультразвуковой визуализации включает в себя обрабатывающий блок трехмерного потока, выполненный с возможностью формирования данных трехмерного потока на основе полученного ультразвукового сигнала, а также блок обработки изображений потока, выполненный с возможностью формирования трехмерной карты сосудов на основе данных трехмерного потока. В этом случае сосуды или сосудистая сеть в анатомической области идентифицируются с использованием трехмерного метода визуализации потоков. Этот метод является способом, обеспечивающим особенно надежную и/или высококачественную идентификацию сосудов и трехмерную карту сосудов. Трехмерная визуализация потоков может обеспечить высококачественное трехмерное цветное изображение потока или трехмерную карту сосудов. Частоты кадров могут быть небольшими, но поскольку трехмерная визуализация потоков выполняется в начале или до процедуры наведения по ультразвуковому изображению, это не влияет на частоту кадров во время процедуры наведения по ультразвуковому изображению. Данные трехмерного потока также могут быть названы объемом потока. Например, данные трехмерного потока или объем потока могут быть сформированы таким образом, что матрица измерительных преобразователей передает множество импульсов ультразвука для каждой линии (для оценки потока на этой линии или в этом положении), а затем производится получение данных по этим линиям путем развертки объема. Число импульсов ультразвука может быть увеличено. Это увеличивает чувствительность, но также и уменьшает частоту кадров. Соответствующий способ включает в себя дополнительные этапы формирования данных трехмерного потока на основе полученного ультразвукового сигнала, а также формирования трехмерной карты сосудов на основе данных трехмерного потока.
В модификации этого варианта осуществления данные трехмерного потока формируются с использованием методики цветного потока, методики цветной ангиографии (CPA), методики визуализации потоков B-режима или методики контрастной ультразвуковой эхографии. Эти методики являются особенно подходящими для обеспечения изображения потока. В случае цветной ангиографии сформированное изображение потока указывает только величину потока, но не его направление. Таким образом, эта методика является особенно легкой для обеспечения изображения потока при том, что она предоставляет достаточно информации о сосуде. В случае визуализации потока в B-режиме (также называемом B-потоком) изображение потока формируется путем использования методики вычета импульсов в B-режиме. Эта методика обеспечивает визуализацию потока при более высокой частоте кадров, чем традиционная методика цветного потока. Методика контрастной ультразвуковой эхографии является особенно подходящей для улучшения визуализации сосудов, особенно в технически сложных случаях.
В другой модификации этого варианта осуществления система ультразвуковой визуализации включает в себя контроллер, выполненный с возможностью выбирать либо обрабатывающий блок объема B-режима для формирования объема B-режима, либо обрабатывающий блок трехмерного потока для формирования данных трехмерного потока. Таким образом можно легко реализовать сначала получение трехмерной карты сосудов до или в начале процедуры наведения по изображению, а затем визуализацию с использованием B-режима во время процедуры наведения по изображению. Например, контроллер может быть выполнен с возможностью выбирать обрабатывающий блок трехмерного потока при получении первого ввода от пользователя (например, когда пользователь нажимает кнопку «Start») и выбирать обрабатывающий блок объема B-режима при получении второго ввода от пользователя (например, когда пользователь нажимает кнопку «Accept»). Например, когда контроллер выбирает обрабатывающий блок трехмерного потока, данные трехмерного потока могут быть сформированы таким образом, что матрица измерительных преобразователей передает множество импульсов ультразвука для каждой линии, а затем производится получение данных по этим линиям путем развертки объема. Например, когда контроллер выбирает обрабатывающий блок объема B-режима, объем B-режима может быть сформирован таким образом, что матрица измерительных преобразователей передает единственный импульс для каждой линии, а затем производится получение данных по этим линиям путем развертки объема. Соответствующий способ включает в себя дополнительный этап выбора либо обрабатывающего блока объема B-режима для формирования объема B-режима, либо обрабатывающего блока трехмерного потока для формирования данных трехмерного потока.
В другом варианте осуществления система ультразвуковой визуализации включает в себя блок сегментации сосуда, выполненный с возможностью создания трехмерной карты сосудов путем выполнения методики сегментации сосуда. В этом случае сосуды или сосудистая сеть в анатомической области идентифицируются с использованием методики сегментации сосуда. Это является особенно легким и/или надежным методом идентификации сосудов и обеспечения трехмерной карты сосудов. Это избавляет от необходимости выполнять визуализацию потока, которая может быть затруднительной в некоторых клинических ситуациях или для некоторых пациентов. В соответствующем способе этап создания трехмерной карты сосудов включает в себя выполнение методики сегментации сосуда.
Трехмерная карта сосудов создается на основе трехмерных ультразвуковых данных, а именно данных объема B-режима, которые система должна получить в любом случае. Это обеспечивает особенно легкий метод создания трехмерной карты сосудов без использования какой-либо другой системы или данных. Объем B-режима может быть, например, обычными трехмерными ультразвуковыми данными или трехмерными ультразвуковыми данными с улучшенной контрастностью. В соответствующем способе методика сегментации сосуда выполняется на основе объема B-режима.
В другой модификации этого варианта осуществления блок сегментации сосуда выполнен с возможностью выполнения методики сегментации сосуда на основе данных компьютерной томографии или данных магнитного резонанса. В этом случае трехмерная карта сосудов создается на основе данных компьютерной томографии или данных магнитного резонанса, в частности, полученных от отдельной системы компьютерной томографии или магнитного резонанса. Это обеспечивает особенно надежный метод создания трехмерной карты сосудов, поскольку данные компьютерной томографии или данные магнитного резонанса легче сегментировать, чем ультразвуковые данные, особенно в том случае, когда для компьютерной томографии или магнитного резонанса используется контрастное вещество. Данные компьютерной томографии могут быть, например, данными обычной компьютерной томографии, данными компьютерной томографии с коническим лучом или данными ангиографической компьютерной томографии. Данные магнитного резонанса могут быть, например, данными обычного магнитного резонанса или данными ангиографического магнитного резонанса. Данные компьютерной томографии или данные магнитного резонанса могут быть получены как с использованием контрастного вещества, так и без него. В соответствующем способе методика сегментации сосуда выполняется на основе данных компьютерной томографии или данных магнитного резонанса.
В еще одном варианте осуществления блок совмещения выполнен с возможностью получения информации об отслеживании положения ультразвукового измерительного преобразователя для выбора части трехмерной карты сосудов, соответствующей текущему изображению B-режима. Информация об отслеживании положения ультразвукового измерительного преобразователя указывает и/или отслеживает положение ультразвукового датчика, имеющего матрицу измерительных преобразователей, также называемого ультразвуковым измерительным преобразователем. Таким образом, совмещение может непрерывно обновляться, что увеличивает надежность и удобство пользования системы. В частности, по мере того как ультразвуковой датчик или ультразвуковой измерительный преобразователь перемещается при сканировании пациента, доктор может видеть и отслеживать в реальном времени инвазивное медицинское устройство и сосуды, находящиеся вокруг него. Соответствующий способ включает в себя дополнительный этап получения информации об отслеживании положения ультразвукового измерительного преобразователя, причем этап выбора включает в себя выбор части с использованием информации об отслеживании положения ультразвукового измерительного преобразователя.
В модификации этого варианта осуществления система ультразвуковой визуализации дополнительно включает в себя обрабатывающий блок, выполненный с возможностью формирования информации об отслеживании положения ультразвукового измерительного преобразователя на основе временной последовательности объемов B-режима. В частности, информация об отслеживании положения ультразвукового измерительного преобразователя может быть информацией о его повороте и/или перемещении. В этом случае информация об отслеживании положения ультразвукового измерительного преобразователя предоставляется на основе трехмерных ультразвуковых данных, а именно данных объема B-режима, которые система должна получить в любом случае. Это обеспечивает особенно легкий метод формирования информации об отслеживании положения ультразвукового измерительного преобразователя без использования какого-либо другого устройства или устройств. Это использование временной последовательности объемов B-режима для формирования информации об отслеживании положения ультразвукового измерительного преобразователя также называется отслеживанием на основе изображения. При наличии временной последовательности трехмерных ультразвуковых объемов может быть отслежено перемещение или вращение особенностей в этих объемах B-режима, и на основе этого могут быть извлечены вектор перемещения или вектор вращения. Таким образом, обрабатывающий блок может быть выполнен с возможностью выполнения функции отслеживания особенностей во временной последовательности объемов B-режима и формирования вектора перемещения или вектора вращения на основе отслеживания особенностей. Этот вектор перемещения или вектор вращения может затем использоваться для того, чтобы выбрать подходящую часть трехмерной карты сосудов. Термин «временная последовательность» может относиться к объемам B-режима, получаемым непосредственно друг за другом, или может относиться к объемам B-режима, получаемым не непосредственно друг за другом и, таким образом, разделенным некоторыми интервалами времени (например, каждый второй или каждый третий объем). Соответствующий способ включает в себя дополнительный этап формирования информации об отслеживании положения ультразвукового измерительного преобразователя на основе временной последовательности объемов B-режима.
В дополнительной модификации этого варианта осуществления система ультразвуковой визуализации дополнительно включает в себя датчик положения, который располагается в известном фиксированном положении относительно матрицы измерительных преобразователей. Информация об отслеживании положения ультразвукового измерительного преобразователя представляет собой информацию о положении, получаемую от датчика положения. Это обеспечивает особенно легкий метод формирования информации об отслеживании положения ультразвукового измерительного преобразователя, который не требует никакой дополнительной обработки сигналов. В частности, информация о положении может быть ориентацией и/или изменением положения ультразвукового датчика и, таким образом, матрицы измерительных преобразователей. Датчик положения может быть, например, расположен в известном фиксированном положении относительно ультразвукового датчика, имеющего матрицу измерительных преобразователей, например, он может быть расположен на или присоединен к корпусу ультразвукового датчика. Например, датчик положения может быть электромагнитным отслеживающим датчиком (EM), или волоконно-оптическим отслеживающим датчиком, или любым другим датчиком, который обеспечивает информацию об отслеживании положения ультразвукового измерительного преобразователя. Соответствующий способ включает в себя дополнительный этап получения информации об отслеживании положения ультразвукового измерительного преобразователя от датчика положения, который располагается в известном фиксированном положении относительно матрицы измерительных преобразователей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты настоящего изобретения будут объяснены и станут очевидными из ссылок на вариант (варианты) осуществления, описанные далее. На следующих чертежах:
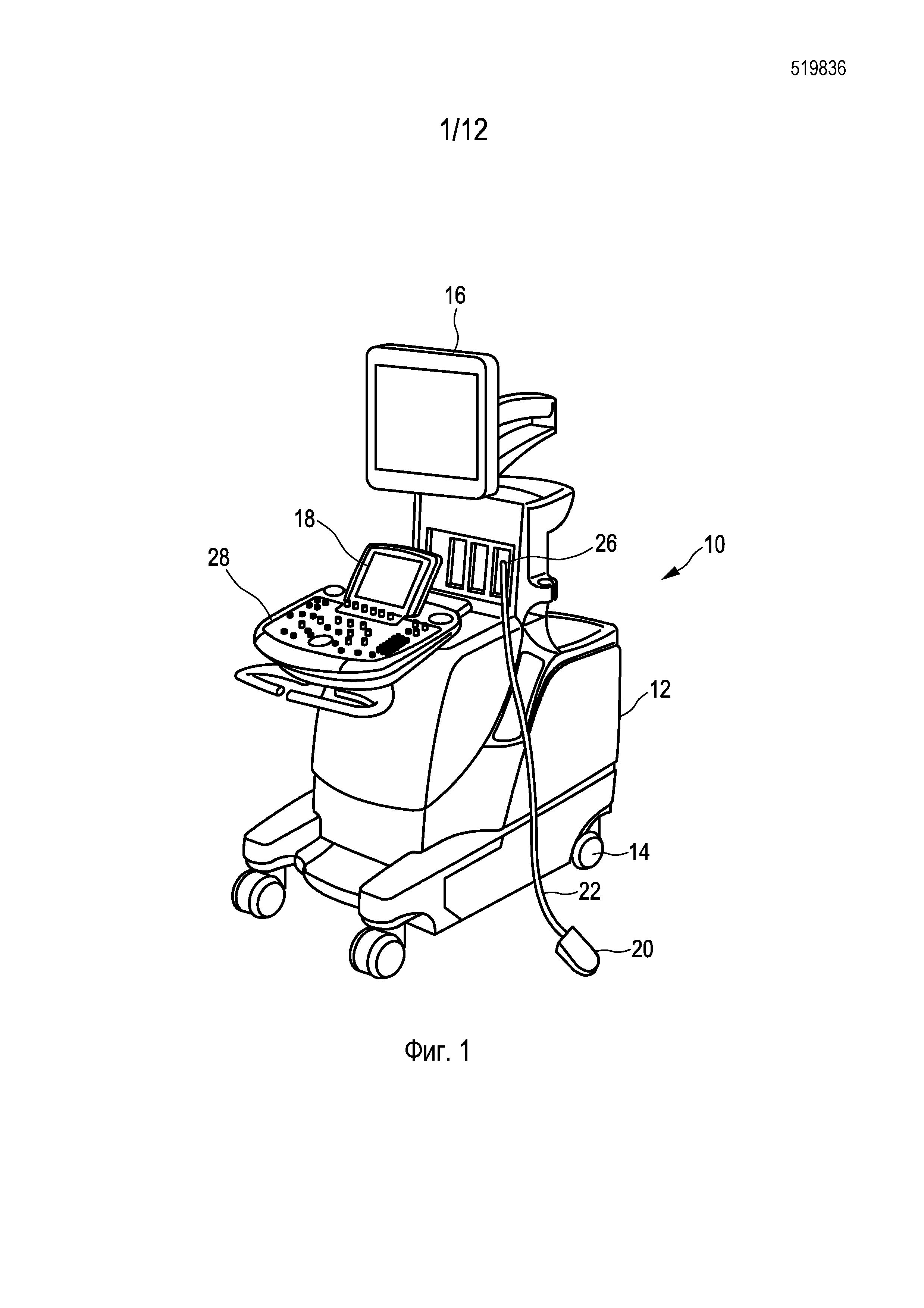
Фиг. 1 показывает вид в перспективе системы ультразвуковой визуализации в соответствии с примером;
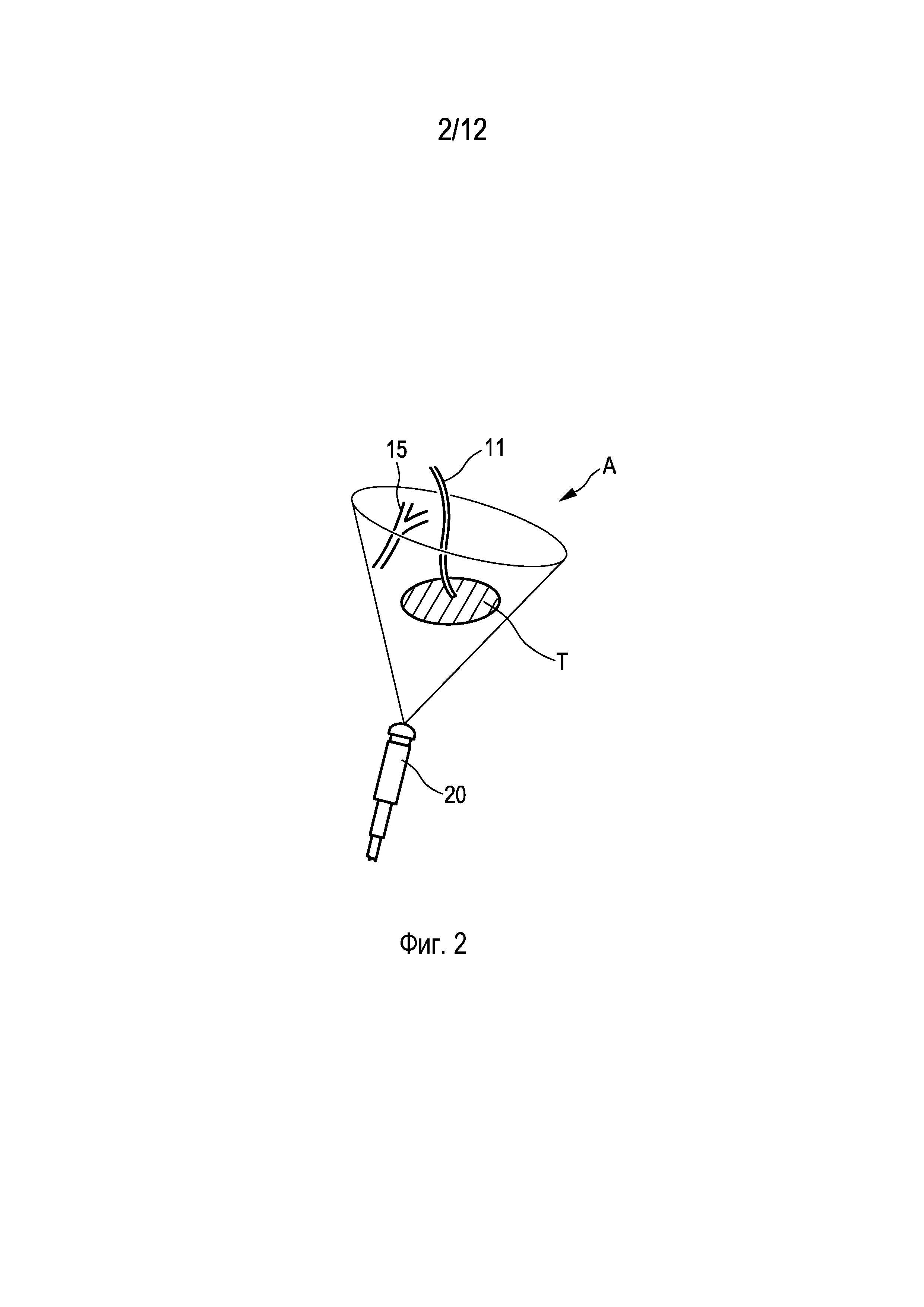
Фиг. 2 показывает схематическую диаграмму примерного ультразвукового датчика, осуществляющего визуализацию анатомической области в процедуре наведения по изображению;
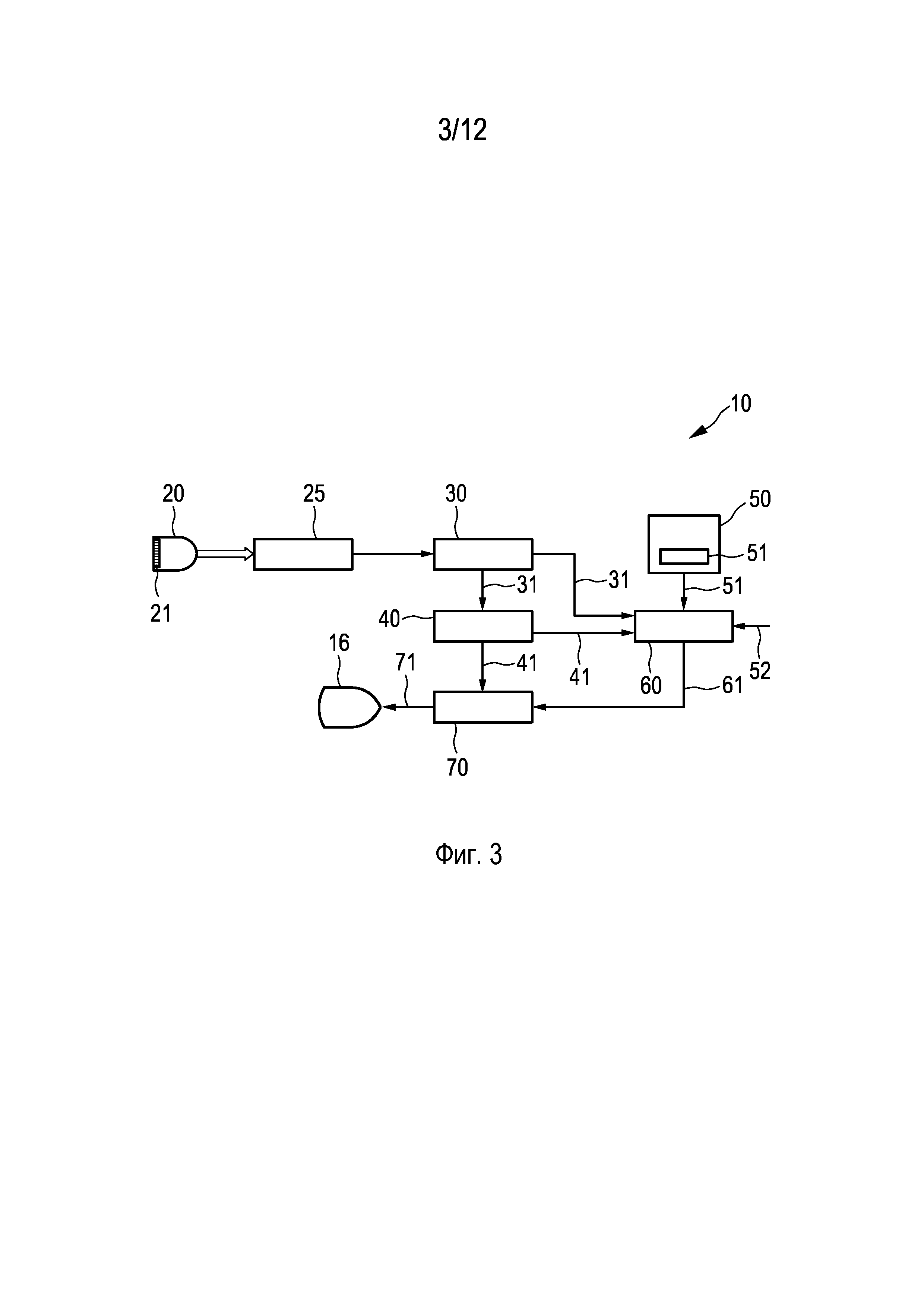
Фиг. 3 показывает блок-схему системы ультразвуковой визуализации в соответствии с первым вариантом осуществления;
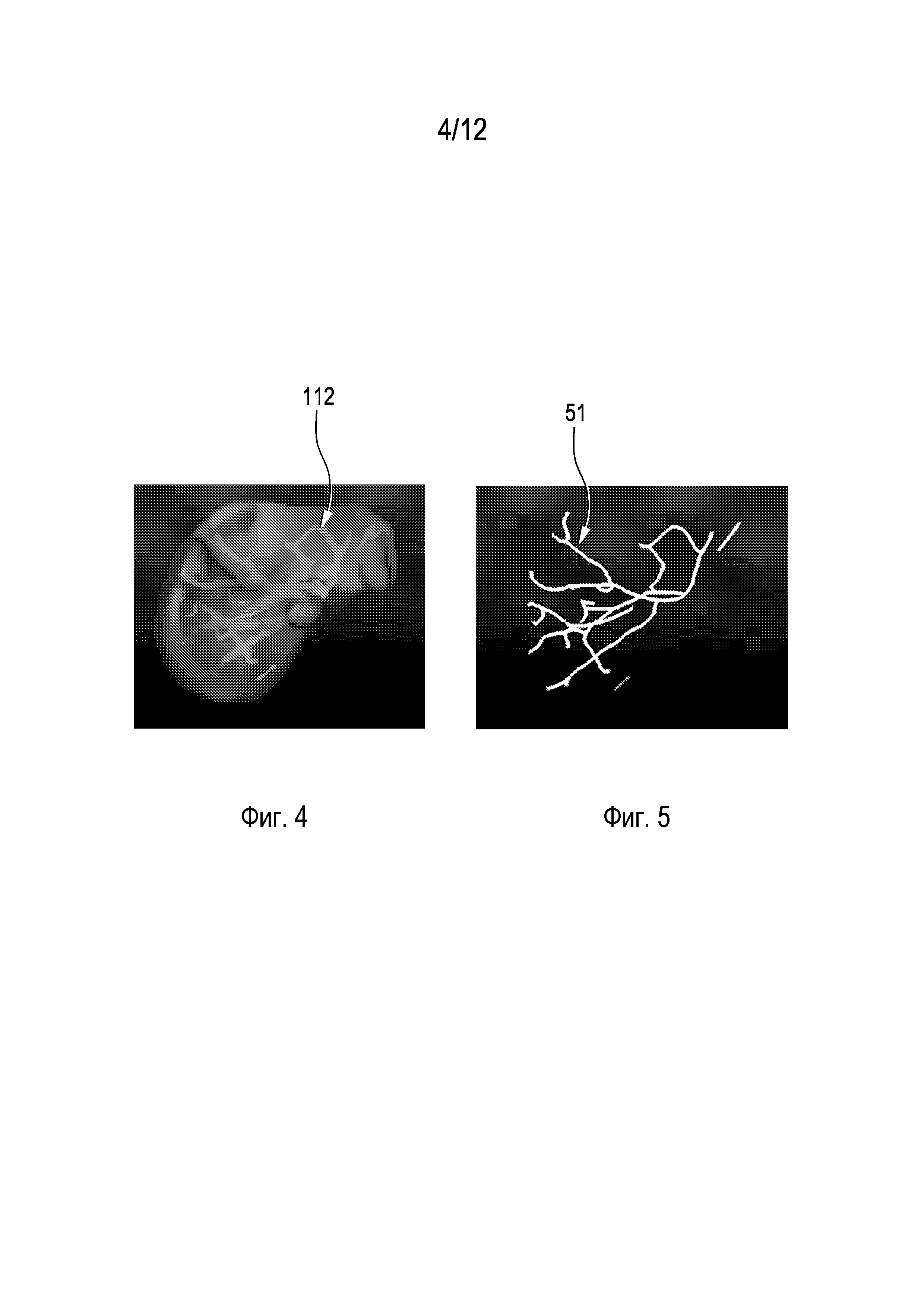
Фиг. 4 показывает примерный набор данных компьютерной томографии;
Фиг. 5 показывает примерную трехмерную карту сосудов;
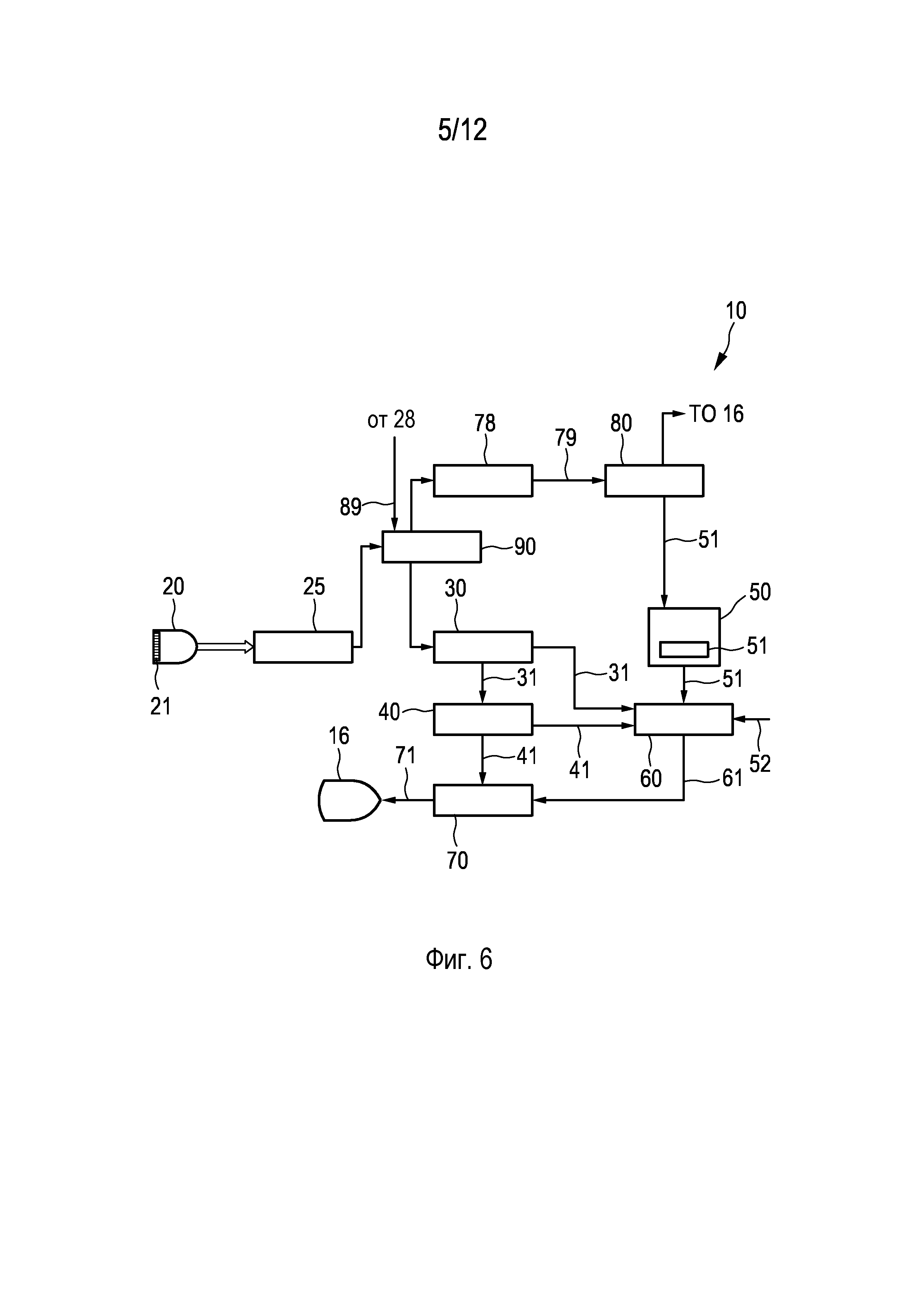
Фиг. 6 показывает блок-схему системы ультразвуковой визуализации в соответствии со вторым вариантом осуществления;
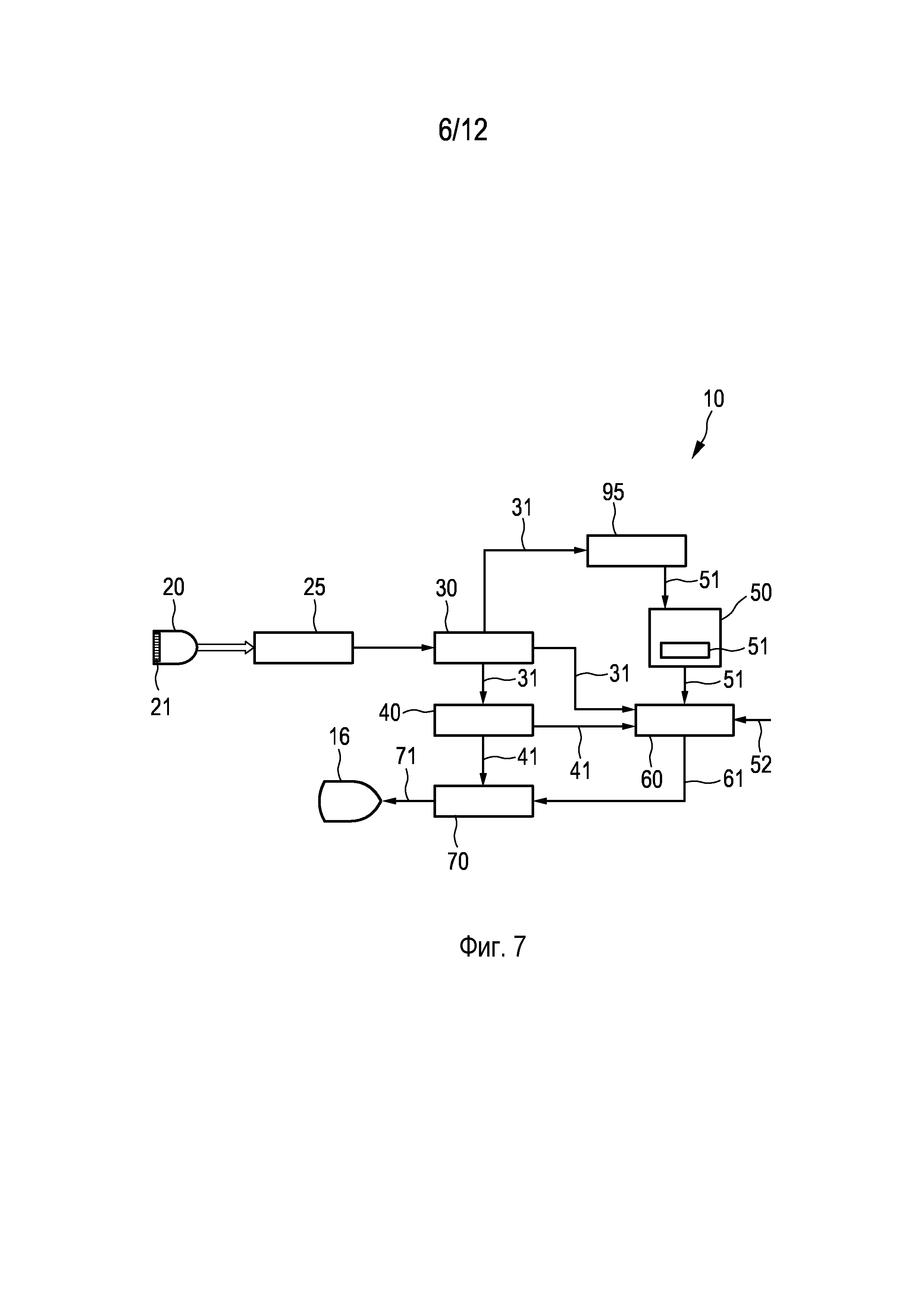
Фиг. 7 показывает блок-схему системы ультразвуковой визуализации в соответствии с третьим вариантом осуществления;
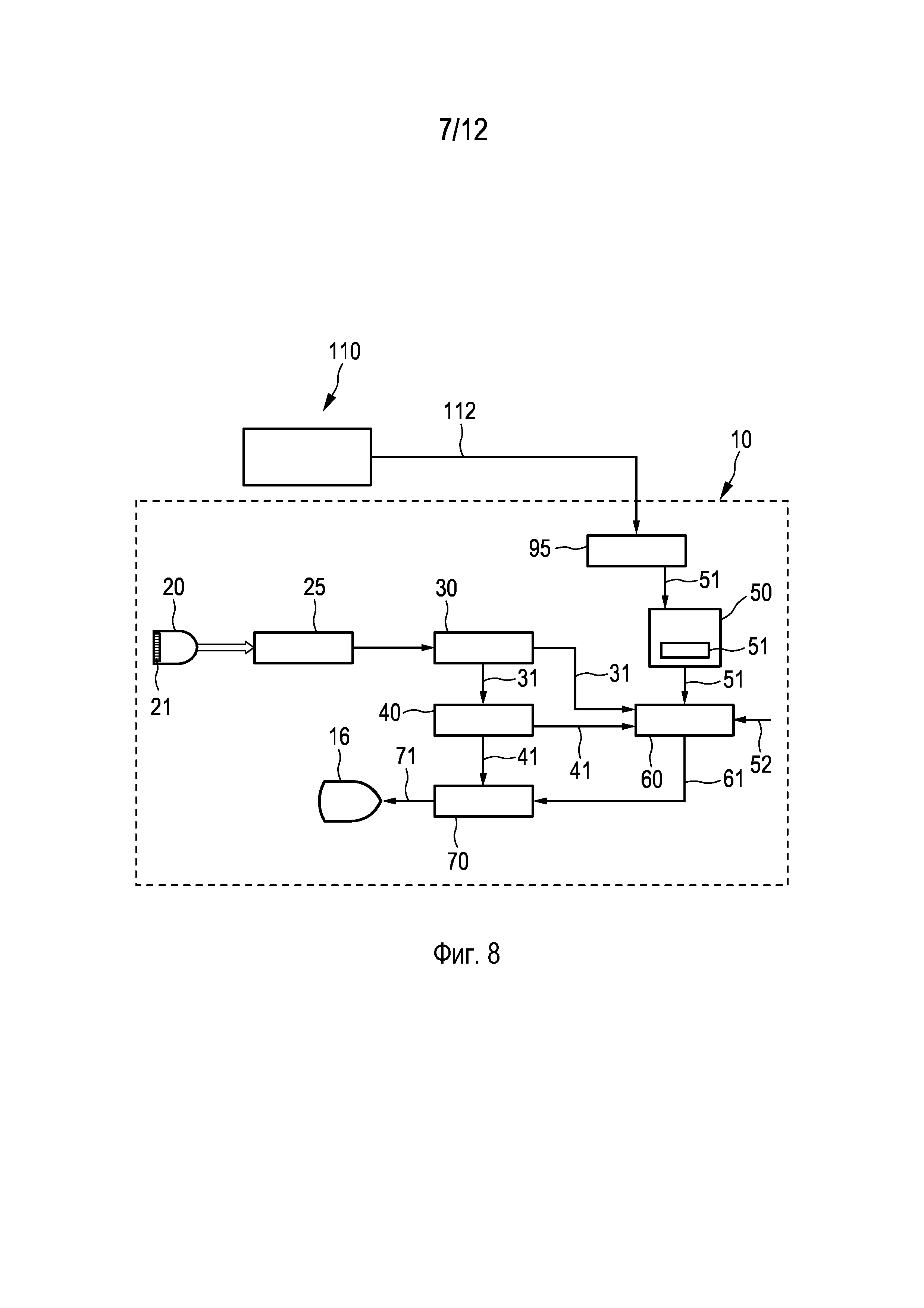
Фиг. 8 показывает блок-схему системы ультразвуковой визуализации в соответствии с четвертым вариантом осуществления;
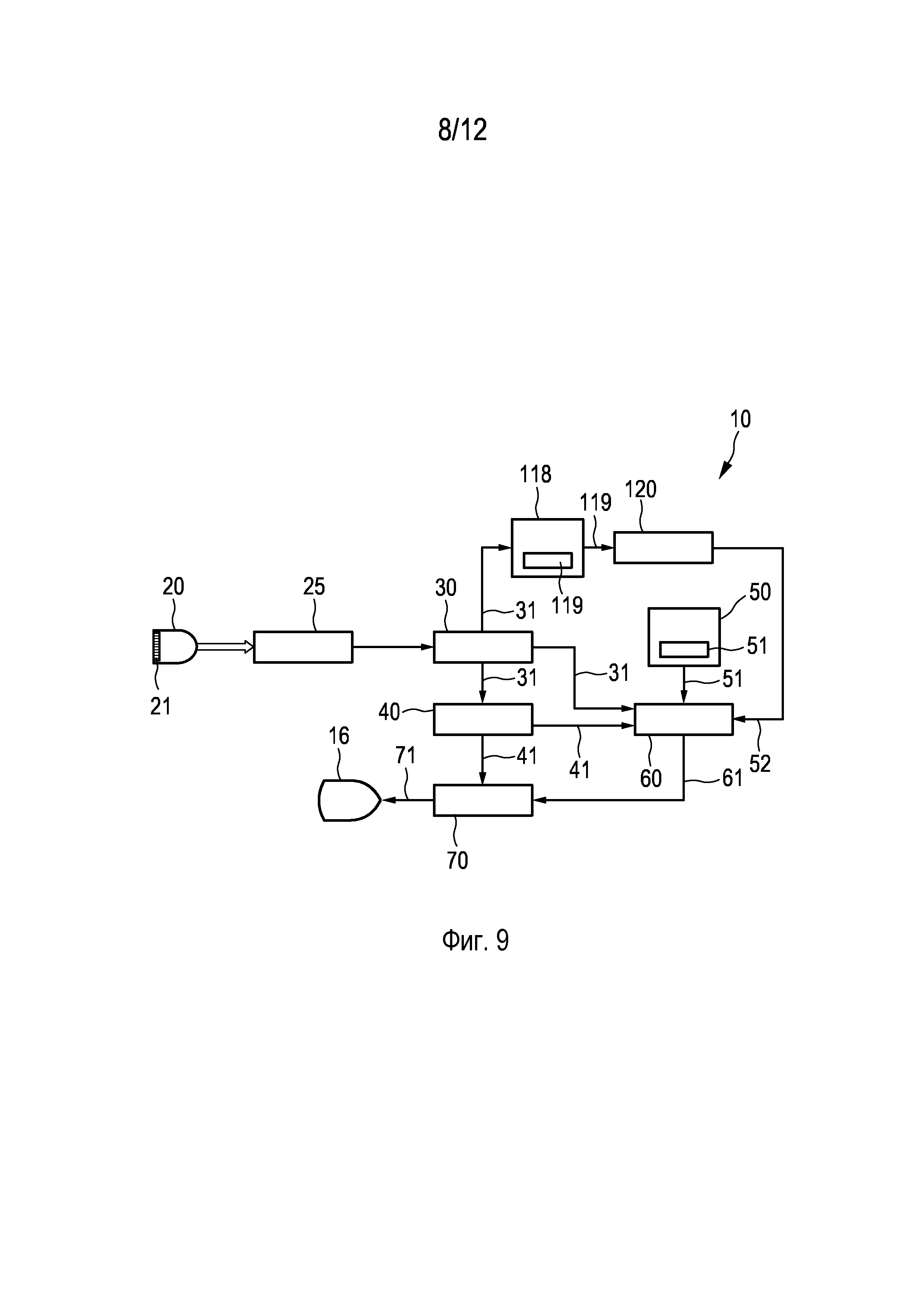
Фиг. 9 показывает блок-схему системы ультразвуковой визуализации в соответствии с пятым вариантом осуществления;
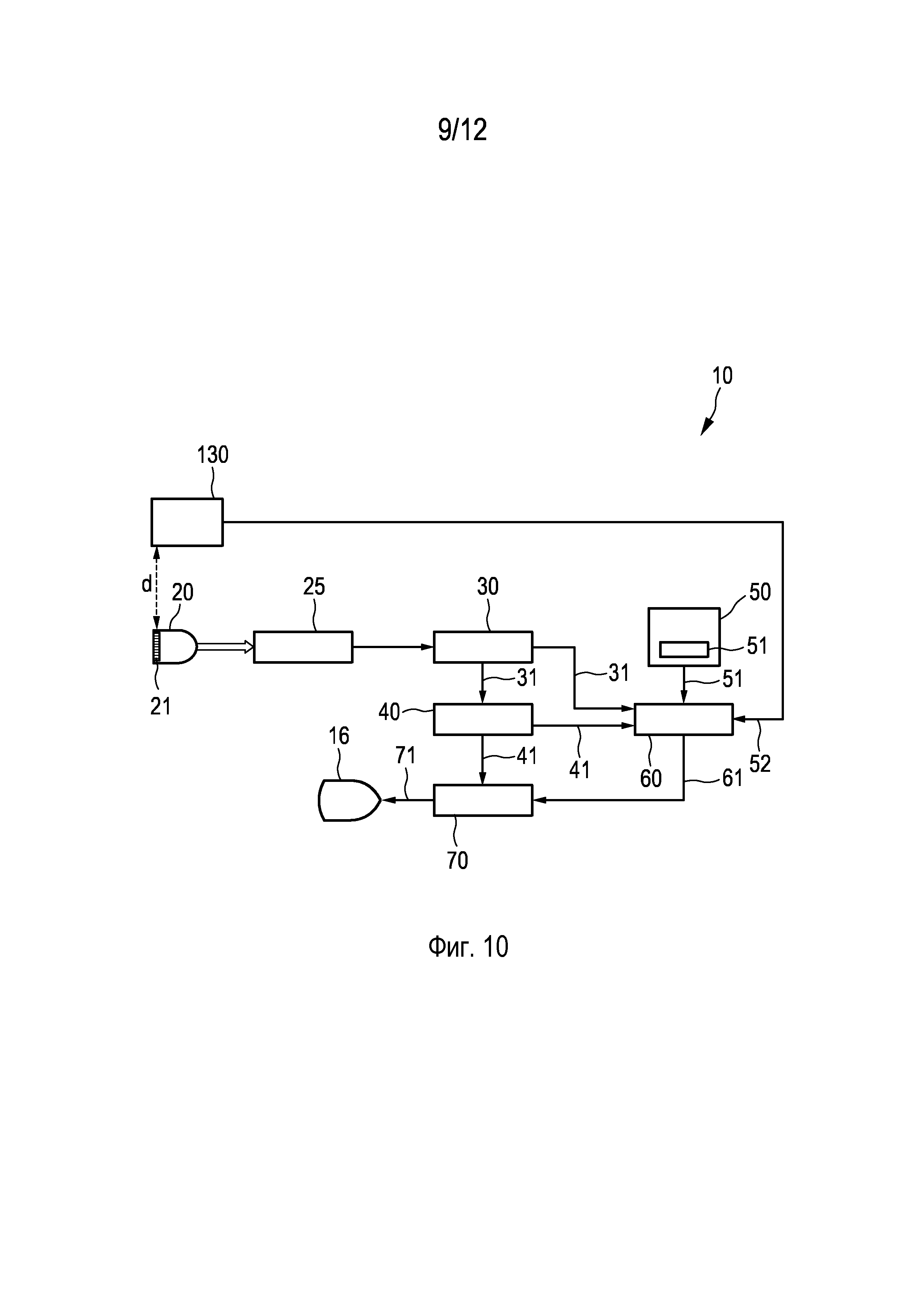
Фиг. 10 показывает блок-схему системы ультразвуковой визуализации в соответствии с шестым вариантом осуществления;
Фиг. 11 показывает один пример дисплея с ультразвуковым изображением, содержащим информацию о сосуде;
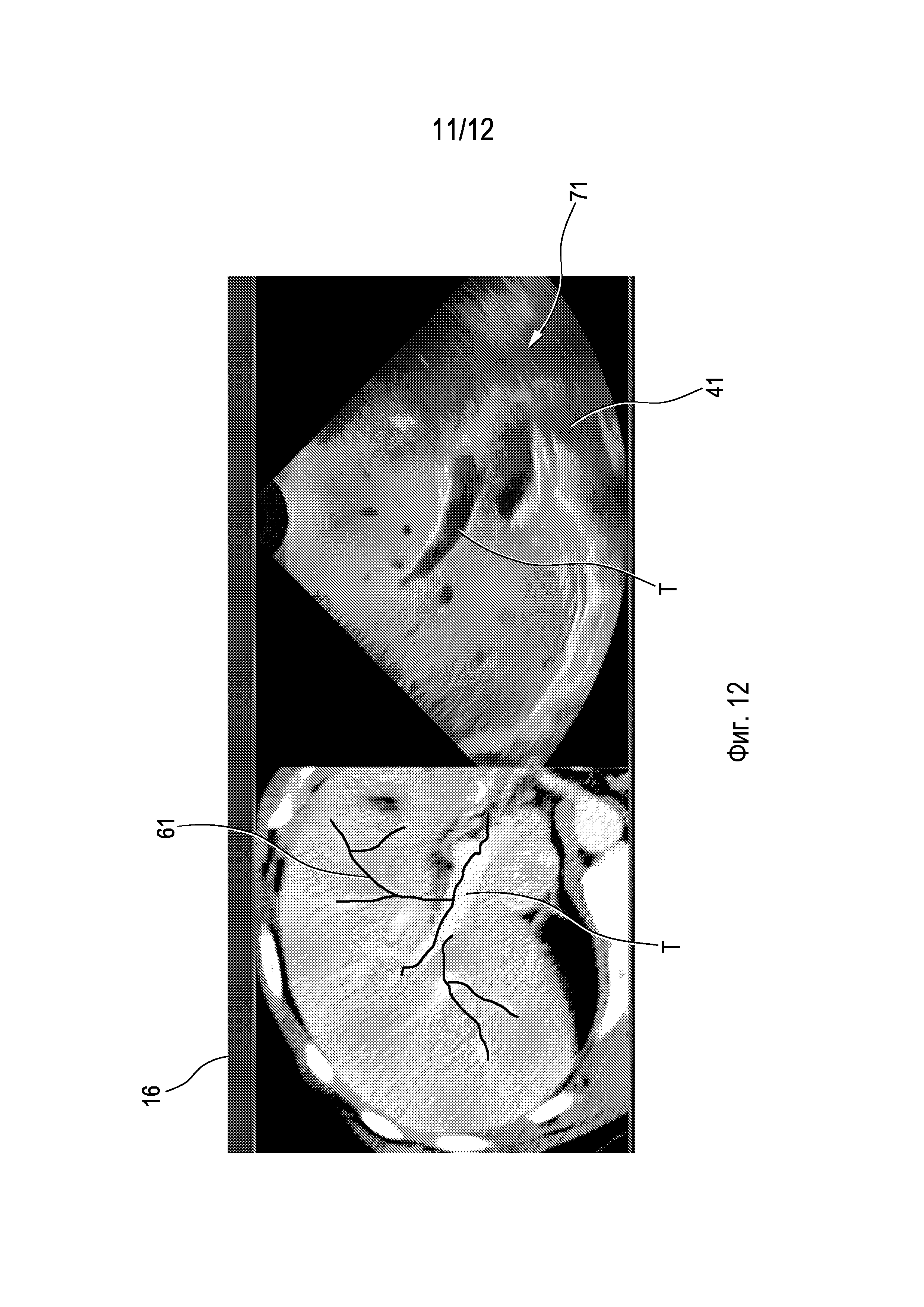
Фиг. 12 показывает другой пример дисплея с ультразвуковым изображением с информацией о сосуде и
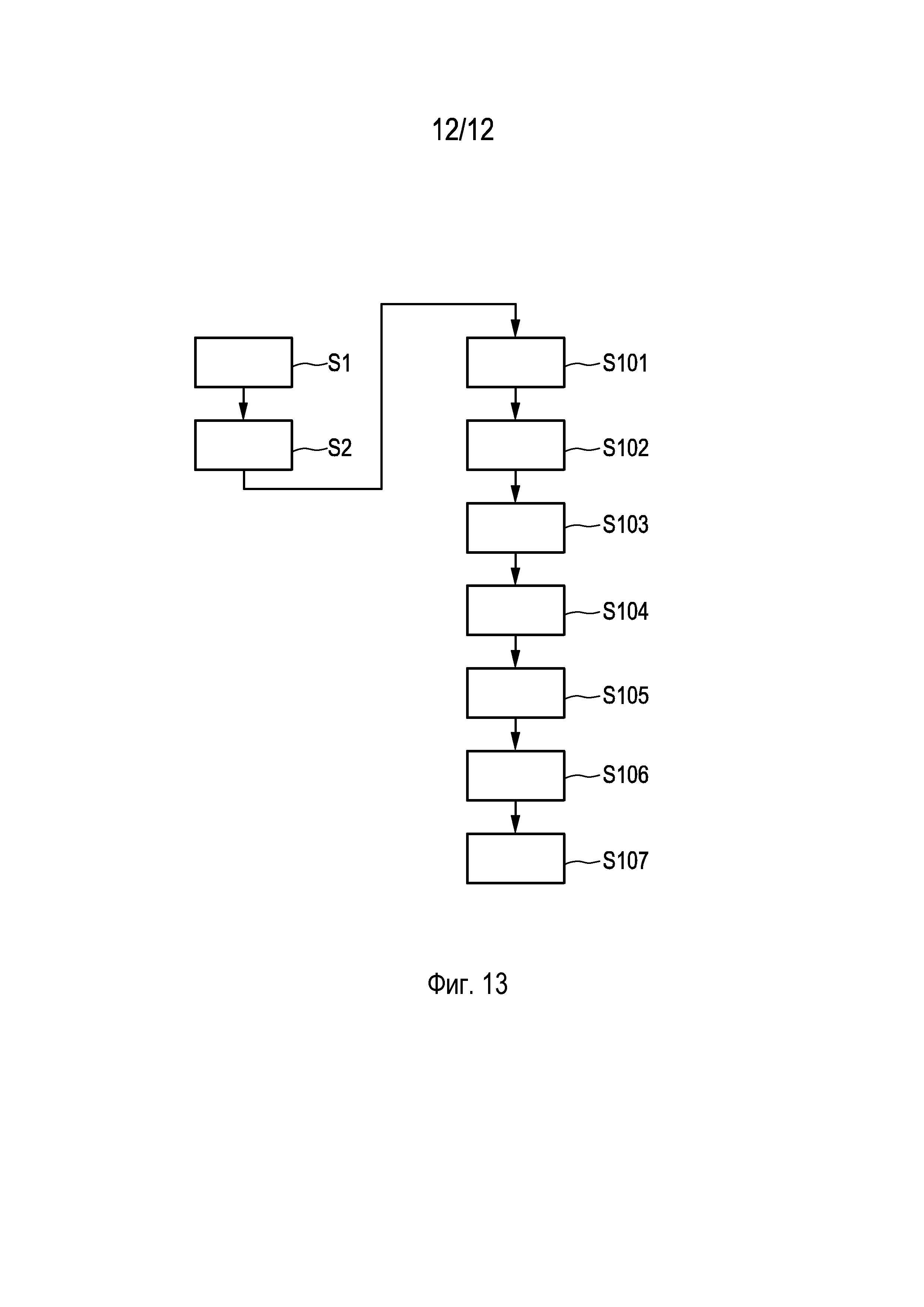
Фиг. 13 показывает блок-схему способа для формирования ультразвукового изображения с наложенной на него информацией о сосуде в соответствии с одним вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 показывает вид в перспективе системы 10 ультразвуковой визуализации в соответствии с одним примером. Система 10 включает в себя шасси 12, содержащее большую часть электронной схемы для системы 10. Шасси 12 может быть смонтировано на тележке 14, а дисплей 16 монтируется на шасси 12. Ультразвуковой датчик 20 может быть подсоединен посредством кабеля 22 к одному из разъемов 26 на шасси 12. Шасси 12 включает в себя клавиатуру и органы управления, в целом обозначенные ссылочным номером 28, для того чтобы позволить доктору или специалисту по ультразвуковой эхографии работать с ультразвуковой системой 10 и вводить информацию о пациенте или типе проводимого исследования. За пультом управления или органами 28 управления находится сенсорный дисплей 18, на котором могут быть выведены программируемые функциональные клавиши, дополняющие клавиатуру и органы 28 управления при управлении работой системы 10. Шасси 12 обычно также включает в себя указывающее устройство, такое как шаровой указатель, который может использоваться для, например, управления экранным указателем. Шасси 12 также может включать в себя одну или более кнопок (не показаны), на которые можно нажать или щелкнуть после управления экранным указателем. Эти операции аналогичны операциям, производимым с мышью на обычном компьютере. При работе датчик 20 визуализации, имеющий внутри матрицу измерительных преобразователей, помещается напротив кожи пациента (не показана) и удерживается неподвижно для получения изображения крови или ткани в двухмерной или трехмерной анатомической области, расположенной под кожей пациента. Изображение выводится на дисплей 16, и оно может быть записано устройством записи (не показано), которое помещается, например, на добавочной полке шасси. Система 10 может также записывать или печатать отчет, содержащий текст и изображения. Данные, соответствующие изображению, также могут быть загружены через подходящий канал связи, такой как Интернет или локальная сеть.
Понятно, что система 10 ультразвуковой визуализации, изображенная на Фиг. 1, является просто иллюстративной и что может использоваться любая другая подходящая система ультразвуковой визуализации. В одном примере система ультразвуковой визуализации может иметь ультразвуковой измерительный преобразователь/датчик X6-1 или ультразвуковой измерительный преобразователь/датчик C5-1, поставки которых в настоящее время осуществляются компанией Philips. В другом примере система ультразвуковой визуализации может дополнительно иметь электромагнитный датчик положения, такой как PercuNav, поставки которого в настоящее время осуществляются компанией Philips.
Фиг. 2 показывает схематическую диаграмму примерного ультразвукового датчика 20, осуществляющего визуализацию анатомической области А в процедуре наведения по изображению. Здесь ультразвуковой датчик 20 обеспечивает получение ультразвукового сигнала или данных во время введения, использования или работы инвазивного медицинского устройства 11 (например, иглы, биопсийной иглы или абляционного зонда) в анатомической области А тела пациента. Например, целью T для медицинского инвазивного устройства может быть карцинома, подлежащая удалению радиочастотной абляцией (RFA). При выполнении процедуры наведения по изображению доктор должен иметь возможность визуализировать цель T в анатомической области A, приближение инвазивного медицинского устройства 11 к цели T, а также любые сосуды 15, окружающие цель T, в частности кровеносные сосуды или сосудистую сеть. Следовательно, визуализация сосудов 15 является важной для гарантирования того, что ни один из важных сосудов не будет проколот во время введения и наведения инвазивного медицинского устройства 11.
Фиг. 3 показывает блок-схему системы 10 ультразвуковой визуализации в соответствии с первым вариантом осуществления. Система 10 ультразвуковой визуализации включает в себя ультразвуковой датчик 20, имеющий матрицу 21 измерительных преобразователей, выполненную с возможностью обеспечения получаемого ультразвукового сигнала. Матрица 21 измерительных преобразователей может быть, в частности, двухмерной матрицей измерительных преобразователей. Система 10 ультразвуковой визуализации, изображенная на Фиг. 1, включает в себя устройство 25 формирования луча, связанное с ультразвуковым датчиком 20, и его матрицу измерительных преобразователей. Устройство 25 формирования луча получает ультразвуковой сигнал приема или данные от матрицы 21 измерительных преобразователей и выполняет формирование луча. Таким образом получается множество двухмерных сканирований или кадров, которые расположены один за другими которые затем передаются обрабатывающему блоку 30 объема B-режима для того, чтобы сформировать трехмерный объем 31 данных. Таким образом, в варианте осуществления, показанном на Фиг. 3, так же, как и в последующих вариантах осуществления, используется электронное сканирование объема в анатомической области. Понятно, однако, что система может альтернативно использовать также и механическое сканирование.
Как было упомянуто, система 10 ультразвуковой визуализации включает в себя обрабатывающий блок 30 объема B-режима, выполненный с возможностью формирования, с использованием обработки сигналов, объема 31 B-режима на основе получаемого ультразвукового сигнала или данных, полученные от устройства 25 формирования луча. Далее, система 10 включает в себя блок 40 обработки изображений B-режима, выполненный с возможностью обеспечения текущего изображения 41 B-режима для отображения на основе объема 31 B-режима путем обработки изображения. Даже при том, что трехмерный объем данных B-режима формируется обрабатывающим блоком 30 объема B-режима, фактическое представление или отображение данных не обязательно также должно быть трехмерным. Например, для заполненной нетекучей средой структуры в некоторых случаях воспроизведенное трехмерное изображение, возможно, является не самым полезным методом представления данных, и пользователю может быть легче интерпретировать двухмерное изображение или ортогональные двухмерные плоскости изображения, проходящие через объем. В частности, текущее изображение B-режима может быть двухмерным изображением, то есть срезом трехмерного объема B-режима, или может быть (трехмерным) изображением ортогональных двухмерных плоскостей изображения, например, полученных в соответствии с алгоритмом многоплоскостного объемного переформатирования (MPR), которые являются осевыми, сагиттальными и фронтальными плоскостями. Альтернативно, текущее изображение B-режима (подлежащее отображению) может, конечно, также быть трехмерным изображением. В этом случае трехмерное изображение 41 интересующего объема создается из трехмерного объема 31 данных. Это предоставляет пользователю максимально возможную информацию.
Далее, система 10 ультразвуковой визуализации включает в себя память 50, выполненную с возможностью хранения ранее полученной трехмерной карты 51 сосудов. Это означает, что трехмерная карта 51 сосудов в анатомической области получается или создается в начале или перед процедурой наведения по ультразвуковому изображению. Поскольку трехмерная карта сосудов получается в начале процедуры наведения по ультразвуковому изображению, до фактического введения инвазивного медицинского устройства в тело пациента, можно потратить время на то, чтобы получить максимально качественную трехмерную карту сосудов. Фиг. 5 показывает пример такой трехмерной карты 51 сосудов, в данном случае печени. Понятно, что конкретная карта сосудов печени, изображенная на Фиг. 5, является просто примерной и что может использоваться любая другая подходящая карта сосудов, например другого органа, в частности органа, который может быть отображен с использованием ультразвука.
Частоты кадров во время получения трехмерной карты 51 сосудов могут быть небольшими, но поскольку трехмерная карта 51 сосудов получается в начале или до выполнения процедуры наведения по ультразвуковому изображению, это не влияет на частоту кадров во время самой процедуры наведения по ультразвуковому изображению, использующей визуализацию B-режима, как объяснено выше. Таким образом, поскольку получение текущих или живых изображений B-режима с использованием обрабатывающего блока 30 объема B-режима и блока 40 обработки изображений B-режима, как объяснено выше, задействует только B-режим, могут быть достигнуты высокие частоты кадров (в реальном времени).
Система 10 ультразвуковой визуализации включает в себя блок 60 совмещения, выполненный с возможностью совмещения предварительно полученной трехмерной карты 51 сосудов в объеме 31 B-режима. Для того чтобы выполнить такое совмещение, может использоваться любой подходящий способ или методика. В одном конкретном неограничивающем примере может использоваться методика совмещения, раскрытая в публикации Automatic Non-Linear Mapping of Pre-Procedure CT Volumes to 3D Ultrasound, Wein et al., IEEE International Symposium on Biomedical Imaging (ISBI), Rotterdam, 2010, которая включена в настоящий документ посредством ссылки. В другом конкретном неограничивающем примере может использоваться методика совмещения, раскрытая в публикации Three-Dimensional Registration and Fusion of Ultrasound and MRI Using Major Vessels as Fiducial Markers, Porter et al., IEEE Trans Med Imaging 2001, 20(4), pp. 354-359, которая включена в настоящий документ посредством ссылки. В дополнительном конкретном неограничивающем примере может использоваться методика совмещения, раскрытая в публикации Vessel-Based Non-Rigid Registration of MR/CT and 3D Ultrasound for Navigation in Liver Surgery, Lange et al., Computer Aided Surgery, 8:228-240 (2003), которая включена в настоящий документ посредством ссылки.
Кроме того, блок 60 совмещения выполнен с возможностью выбора по меньшей мере части 61 трехмерной карты сосудов, соответствующей текущему изображению 41 B-режима. В одном примере, если текущее изображение 41 B-режима является двухмерным изображением или изображением ортогональных двухмерных плоскостей изображения, как объяснено выше, часть 61 является двухмерным срезом трехмерной карты 51 сосудов. Таким образом, если объем 31 B-режима разделяется на срезы для получения двухмерного изображения 41 B-режима для отображения, трехмерная карта 51 сосудов также разделяется на срезы точно таким же образом. В альтернативном примере, если текущее изображение 41 B-режима является трехмерным изображением, эта часть является трехмерной частью трехмерной карты 51 сосудов. Таким образом, если должно быть отображено трехмерное изображение 41 B-режима, трехмерная карта 51 сосудов накладывается точно таким же образом. В другом примере часть 61 трехмерной карты сосудов представляет собой всю трехмерную карту сосудов целиком. Таким образом, в этом примере отображается вся сохраненная трехмерная карта сосудов или информация.
Предпочтительно или опционально трехмерная карта сосудов отслеживается, то есть непрерывно обновляется по мере выполнения процедуры наведения по ультразвуковому изображению. В этом случае блок 60 совмещения выполняется с возможностью получения информации 52 об отслеживании положения ультразвукового измерительного преобразователя для того, чтобы выбрать часть 61 трехмерной карты 51 сосудов, соответствующую текущему изображению 41 B-режима. Другими словами, часть 61 выбирается с использованием полученной информации 52 об отслеживании положения ультразвукового измерительного преобразователя. Информация 52 об отслеживании положения ультразвукового измерительного преобразователя указывает и/или отслеживает положение ультразвукового датчика 20, имеющего матрицу измерительных преобразователей, также называемого ультразвуковым измерительным преобразователем или трансдуцером. Информация 52 об отслеживании положения ультразвукового измерительного преобразователя используется для выбора части 61 и/или для непрерывного обновления совмещения. Использование информации об отслеживании положения ультразвукового измерительного преобразователя будет объяснено более подробно со ссылкой на варианты осуществления, изображенные на Фиг. 9 и Фиг. 10.
Опционально ультразвуковая система 10 может также включать в себя блок 70 обработки изображений, выполненный с возможностью получения текущего изображения 41 B-режима и выбранной части 61 трехмерной карты 51 сосудов для того, чтобы обеспечить ультразвуковое изображение 71 с информацией о сосуде, которое затем может быть отображено.
Система 10 ультразвуковой визуализации дополнительно включает в себя дисплей 16, выполненный с возможностью отображения ультразвукового изображения 71. Ультразвуковое изображение 71 основано на текущем изображении 41 B-режима и на выбранной части 61. Таким образом, пользователь системы (например, доктор или клинический врач) может использовать отображенное ультразвуковое изображение 71 с информацией о сосуде во время процедуры наведения по изображению, как, например, было объяснено со ссылкой на Фиг. 2. Как было объяснено выше, ультразвуковое изображение 71 или текущее изображение 41 B-режима, которое необходимо отобразить, может быть либо двумерным, либо трехмерным изображением.
Фиг. 11 в форме принципиальной схемы показывает один пример дисплея 16, отображающего ультразвуковое изображение 71 с информацией о сосуде. Фиг. 12 в форме картинки показывает другой пример дисплея 16, отображающего ультразвуковое изображение 71 с информацией о сосуде. В каждом из примеров, изображенных на Фиг. 11 и Фиг. 12, ультразвуковое изображение 71 или текущее изображение 41 B-режима является двухмерным изображением B-режима, иллюстрирующим цель T в анатомической интересующей области. В данном случае часть 61 является двухмерным срезом трехмерной карты сосудов, как можно видеть на Фиг. 11 или Фиг. 12. Инвазивное медицинское устройство (не показанное на Фиг. 11 или Фиг. 12) также может быть видимым на изображении во время процедуры наведения по изображению.
В примере, изображенном на Фиг. 11, ультразвуковое изображение 71 обеспечивается путем наложения текущего изображения 41 B-режима и выбранной части 61 трехмерной карты сосудов. В данном случае блок 70 обработки изображений выполнен с возможностью наложения или слияния текущего изображения 41 B-режима и выбранной части 61 трехмерной карты 51 сосудов с тем, чтобы обеспечить ультразвуковое изображение 71 с наложенной на него информацией о сосуде, которое затем может быть отображено. Таким образом, ультразвуковое изображение 71 имеет наложенную на него информацию о сосуде. Другими словами, информация о сосуде или часть карты 61 трехмерного сосуда непосредственно накладывается на ультразвуковое изображение или включается в него. Ультразвуковое изображение 71 включает в себя информацию о сосуде, наложенную на двухмерное изображение 41 B-режима в форме части 61 трехмерной карты сосудов. В этом примере, изображенном на Фиг. 11, информация о сосуде или часть 61 показана в форме контуров сосудов. Понятно, однако, что информация о сосуде может быть представлена в любом другом подходящем виде, таком как, например, линия, проходящая вдоль центра сосуда, или закрашивание сосуда в пределах его контура.
В примере, изображенном на Фиг. 12, ультразвуковое изображение 71 обеспечивается посредством текущего (или живого) изображения 41 B-режима и выбранной части 61 трехмерной карты сосудов, отображаемых расположенными рядом друг с другом. На Фиг. 12 текущее (или живое) изображение 41 B-режима представлено как первая часть изображения на правой стороне дисплея 16, а выбранная часть 61 представлена во второй части изображения на левой стороне дисплея 16. В данном случае блок обработки изображений 70 выполнен с возможностью добавления текущего изображения 41 B-режима и выбранной части 61 трехмерной карты 51 сосудов рядом друг с другом с тем, чтобы обеспечить ультразвуковое изображение 71 с информацией о сосуде, которое затем может быть отображено. Выбранная часть 61 или информация о сосуде может находиться, например, в ранее полученном совмещенном изображении (например, в цветном изображении). В одном примере выбранная часть 61 может быть представлена или может содержаться в данных компьютерной томографии или в данных магнитного резонанса (см. Фиг. 12), как будет более подробно объяснено со ссылкой на Фиг. 8. В другом примере выбранная часть 61 может быть представлена или может содержаться в ультразвуковом изображении, как будет более подробно объяснено со ссылкой на Фиг. 6 или Фиг. 7. В этом примере, изображенном на Фиг. 12, информация о сосуде или часть 61 показана в форме линии, проходящей вдоль центра сосуда. Однако, как упомянуто выше, понятно, что информация о сосуде может быть представлена любым другим подходящим образом.
Понятно, что отображения, показанные на Фиг. 11 и Фиг. 12, представляют собой конкретные примеры и что ультразвуковое изображение с информацией о сосуде может быть отображено любым другим подходящим образом. В любом случае, доктор или пользователь, смотрящий на дисплей 16, может видеть информацию о сосуде и изображение 41 B-режима, которые помогают обходить сосуды во время процедуры наведения по изображению. Следовательно, на дисплее 16 можно видеть часть совмещенной карты сосудов, которая перемещается вместе с текущим или живым изображением 41 B-режима. Тот факт, что это изображение представляет собой полученную ранее трехмерную карту сосудов вместо карты, получаемой в режиме реального времени, виден из того, что сосуды не пульсируют, а лишь перемещаются и вращаются вместе с положением ультразвукового датчика 20. Опционально на дисплей может быть выведено сообщение, которое сообщает пользователю о том, что информация о сосуде и потоке не является информацией в реальном времени.
Дополнительные варианты осуществления будут теперь объяснены со ссылками на Фиг. 6-10. Поскольку каждый из вариантов осуществления, изображенных на Фиг. 6-10, основан на первом варианте осуществления, изображенном на Фиг. 3, объяснения, относящиеся к варианту осуществления, изображенному на Фиг. 3, также применимы и к вариантам осуществления, изображенным на Фиг. 6-10.
Фиг. 6 показывает блок-схему системы ультразвуковой визуализации в соответствии со вторым вариантом осуществления, в котором сосуды или сосудистая сеть в анатомической области идентифицируются путем использования трехмерного метода визуализации потоков. В варианте осуществления, показанном на Фиг. 6, система 10 ультразвуковой визуализации дополнительно включает в себя обрабатывающий блок 78 трехмерного потока, выполненный с возможностью формирования данных 79 трехмерного потока на основе получаемого ультразвукового сигнала, и блок 80 обработки изображений потока, выполненный с возможностью формирования трехмерной карты 51 сосудов на основе данных 79 трехмерного потока. Данные 79 трехмерного потока (также называемые объемом потока) могут быть сформированы таким образом, что матрица 21 измерительных преобразователей передает множество импульсов ультразвука для каждой линии для того, чтобы оценить поток на этой линии. Затем осуществляется развертка получения этих линий в объеме. Количество импульсов ультразвука может быть увеличено. Это увеличивает чувствительность, но при этом уменьшает частоту кадров. Например, обрабатывающий блок 78 трехмерного потока может быть выполнен с возможностью формирования данных 79 трехмерного потока с использованием методики цветного потока, методики цветной ангиографии (CPA) или методики визуализации потоков B-режима. В случае цветной ангиографии сформированное изображение потока или трехмерная карта сосудов указывает только величину потока, но не направление потока. В случае визуализации потока в B-режиме (также называемом B-потоком) изображение потока формируется путем использования метода вычета импульсов в B-режиме. Кроме того, обрабатывающий блок 78 трехмерного потока может быть выполнен с возможностью формирования данных 79 трехмерного потока с использованием методики контрастной ультразвуковой эхографии. Способ контрастной ультразвуковой эхографии является особенно подходящей методикой для улучшения визуализации сосудов, особенно в технически сложных случаях. Понятно, что фактически для визуализации или восстановления трехмерного изображения потока может использоваться любая методика.
В варианте осуществления, показанном на Фиг. 6, система 10 ультразвуковой визуализации дополнительно включает в себя контроллер 90, выполненный с возможностью выбора либо обрабатывающего блока 30 объема B-режима так, чтобы он формировал объем 31 B-режима, либо обрабатывающего блока 78 трехмерного потока так, чтобы он формировал данные 79 трехмерного потока. В частности, контроллер выполнен с возможностью сначала выбрать обрабатывающий блок 78 трехмерного потока так, чтобы трехмерная карта 51 сосудов могла быть получена до или в начале процедуры наведения по изображению, а затем выбрать обрабатывающий блок объема B-режима так, чтобы во время процедуры наведения по изображению могла использоваться визуализация B-режима. Когда контроллер 90 выбирает обрабатывающий блок 78 трехмерного потока, данные 79 трехмерного потока могут быть сформированы таким образом, что матрица 21 измерительных преобразователей передает множество импульсов ультразвука для каждой линии, а затем осуществляется развертка получения этих линий в объеме. Когда контроллер 90 выбирает обрабатывающий блок 30 объема B-режима, объем 31 B-режима может быть сформирован таким образом, что матрица 21 измерительных преобразователей передает единственный импульс для каждой линии, а затем осуществляется развертка получения этих линий в объеме. Выбор, выполняемый контроллером 90, может быть достигнут, в частности, на основе ввода данных 89 пользователем. Таким образом, контроллер 90 может для получения ввода данных 89 пользователем быть соединен с органами управления 28, такими как, например, органы управления 28, изображенные на Фиг. 1. Контроллер 90 тогда может быть выполнен с возможностью выбора обрабатывающего блока 30 трехмерного потока при получении первого ввода данных 89a пользователем от органов управления 28 (например, когда пользователь нажимает кнопку «Start») и выбора обрабатывающего блока 30 объема B-режима при получении второго ввода данных 89b пользователем от органов управления 28 (например, когда пользователь нажимает кнопку «Accept»). Опционально изображение потока или трехмерная карта 51 сосудов также могут быть отображены сами по себе или отдельно на дисплее 16. Следовательно, как показано на Фиг. 6, изображение потока или трехмерная карта 51 сосудов могут быть переданы на дисплей 16.
Далее для лучшего понимания будет дан конкретный пример использования системы 10. Пользователь помещает ультразвуковой датчик 20, имеющий двухмерную матрицу 21 измерительных преобразователей, в желаемом окне сканирования, которое позволяет визуализировать цель T и путь иглы 11. Перед введением иглы 11 пользователь нажимает кнопку «Start» на органах управления 28. Это инициирует получение высококачественных цветных данных объема потока. Затем пользователь нажимает кнопку «Accept» на органах управления, если цветные данные объема потока обеспечивают желаемую трехмерную карту сосудов (например, показанную на дисплее 16). После этого система 10 немедленно начинает получение объема B-режима с гораздо более высокими объемными скоростями, чем для цветных трехмерных данных потока или объема потока. Затем к последовательным объемам B-режима может быть применен некоторый тип отслеживания анатомических особенностей или отслеживания спекла. Это обеспечивает информацию о величине перемещения и вращения, происходящих при переходе от одного объема к другому. Это перемещение и вращение применяются к трехмерной карте сосуда, основанной на цветных данных трехмерного потока или объеме потока, так, чтобы трехмерная карта сосудов продолжала быть совмещенной с тем, что показывает изображение B-режима. Эта карта сосудов накладывается на текущее или живое изображение B-режима, например, с другим оттенком. Затем происходит наведение иглы либо с использованием двухмерного среза объема B-режима, либо с использованием ортогональных двухмерных плоскостей изображения (например, в соответствии с алгоритмами многоплоскостного объемного переформатирования), либо с использованием трехмерного обработанного изображения. Независимо от метода, с помощью которого нарезается и представляется объем B-режима, совмещенная трехмерная карта сосудов может быть нарезана и представлена точно таким же образом.
Фиг. 7 показывает блок-схему системы 10 ультразвуковой визуализации в соответствии с третьим вариантом осуществления, а Фиг. 8 показывает блок-схему системы ультразвуковой визуализации в соответствии с четвертым вариантом осуществления. В этих вариантах осуществления вместо использования методики получения потока, объясненной со ссылкой на вариант осуществления, изображенный на Фиг. 6, для формирования трехмерной карты 51 сосудов используется трехмерная методика сегментации сосуда на основе данных изображения. Следовательно, в каждом из вариантов осуществления, изображенных на Фиг. 7 и Фиг. 8, система 10 ультразвуковой визуализации включает в себя блок 95 сегментации сосуда, выполненный с возможностью создания трехмерной карты 51 сосудов путем выполнения методики сегментации сосуда. Методика сегментации сосуда может быть, например, методикой, раскрытой в международной патентной заявке WO 2006/085254 A1 или в патентной заявке США US 7870189 B2, которые включены в настоящий документ посредством ссылки. Например, примерная карта или дерево сосудов, показанное на Фиг. 4, основано на методике сегментации сосуда, раскрытой в международной патентной заявке WO 2006/085254 A1 или в патентной заявке США US 7870189 B2.
В варианте осуществления, изображенном на Фиг. 7, блок сегментации сосуда выполнен с возможностью выполнения методики сегментации сосуда на основе объема B-режима. В этом случае трехмерная карта сосудов создается на основе трехмерных ультразвуковых данных, а именно данных объема B-режима, которые система должна получать в любом случае. Это обеспечивает особенно легкий метод создания трехмерной карты сосудов без использования какой-либо другой системы или данных. Объем B-режима может быть, например, обычными трехмерными ультразвуковыми данными или трехмерными ультразвуковыми данными с улучшенной контрастностью.
Вместо использования трехмерных ультразвуковых данных блок 95 сегментации сосуда может быть выполнен с возможностью выполнения методики сегментации сосуда на основе данных 112 компьютерной томографии или магнитного резонанса, как проиллюстрировано в варианте осуществления, изображенном на Фиг. 8. В этом варианте осуществления блок 95 сегментации сосуда выполнен с возможностью получения данных 112 компьютерной томографии или данных магнитного резонанса от отдельной системы 110 компьютерной томографии или системы магнитного резонанса, соединенной с системой 10 ультразвуковой визуализации. Таким образом, в этом варианте осуществления трехмерная карта 51 сосудов создается на основе данных 112 компьютерной томографии или данных магнитного резонанса, полученных от отдельной системы 110 компьютерной томографии или системы магнитного резонанса. Понятно, однако, что данные 112 компьютерной томографии или данные магнитного резонанса могут быть получены любым другим подходящим способом, например на сменном носителе данных или с помощью функциональности компьютерной томографии или магнитного резонанса, имеющейся в самой системе ультразвуковой визуализации. Данные компьютерной томографии могут быть, например, обычными данными компьютерной томографии, данными компьютерной томографии с коническим лучом или данными компьютерно-томографической вазографии. Данные магнитного резонанса могут быть, например, обычными данными магнитного резонанса или данными магнитно-резонансной вазографии. Данные компьютерной томографии или данные магнитного резонанса также могут быть получены как с использованием контрастного вещества (веществ), так и без такого использования.
Фиг. 4 показывает примерный набор 112 данных компьютерной томографии, а Фиг. 5 показывает примерную трехмерную карту 51 сосудов, в частности, созданную из набора 112 данных компьютерной томографии, изображенного на Фиг. 4, с использованием методики сегментации сосуда. Как можно видеть на Фиг. 5, трехмерная карта 51 сосудов показывает схемы сосудов и может также упоминаться как «каркас сосудов».
Фиг. 9 показывает блок-схему системы ультразвуковой визуализации в соответствии с пятым вариантом осуществления, а Фиг. 10 показывает блок-схему системы ультразвуковой визуализации в соответствии с шестым вариантом осуществления. Каждая из Фиг. 9 и Фиг. 10 показывает вариант осуществления того, как может быть сгенерирована информация об отслеживании положения ультразвукового измерительного преобразователя 52, как объяснено со ссылкой на первый вариант осуществления, изображенный на Фиг. 3. На каждой из Фиг. 9 и Фиг. 10 блок 60 совмещения выполнен с возможностью получения информации об отслеживании положения ультразвукового измерительного преобразователя 52 для выбора части 61 трехмерной карты сосудов, соответствующей текущему изображению 41 B-режима, как объяснено со ссылкой на первый вариант осуществления, изображенный на Фиг. 3. Понятно, что вариант осуществления, изображенный на Фиг. 9 или Фиг. 10, который фокусируется на формировании информации об отслеживании положения ультразвукового измерительного преобразователя, может быть объединен с любым из вариантов осуществления, изображенных на Фиг. 3, Фиг. 6, Фиг. 7 или Фиг. 8.
В варианте осуществления, показанном на Фиг. 9, информация об отслеживании положения ультразвукового измерительного преобразователя генерируется с использованием методики, основанной на данных изображения, в частности с использованием отслеживания особенностей. Таким образом, вариант осуществления, изображенный на Фиг. 9, использует отслеживание на основе изображения. В этом случае информация об отслеживании положения ультразвукового измерительного преобразователя 52 обеспечивается на основе трехмерных ультразвуковых данных, а именно данных 31 объема B-режима, которые система должна получать в любом случае. Термин «временная последовательность» может относиться к объемам B-режима, получаемым непосредственно друг за другом, или может относиться к объемам B-режима, получаемым не непосредственно друг за другом и, таким образом, разделенным некоторыми интервалами времени (например, каждый второй или каждый третий объем). В варианте осуществления, изображенном на Фиг. 9, система 10 ультразвуковой визуализации дополнительно включает в себя обрабатывающий блок 120, выполненный с возможностью формирования информации об отслеживании положения ультразвукового измерительного преобразователя 52 на основе временной последовательности объемов B-режима. В варианте осуществления, изображенном на Фиг. 9, система 10 ультразвуковой визуализации также включает в себя память 118 для хранения временной последовательности объемов B-режима. Объемы 31 B-режима, сформированные блоком обработки объемов 31 B-режима, передаются один за другим в память 118 для хранения. Обрабатывающий блок 120 затем получает и обрабатывает последовательные во времени изображения 119 B-режима. В частности, обрабатывающий блок 120 может быть выполнен с возможностью выполнения отслеживания особенности в последовательных во времени объемах 119 B-режима и формирования вектора переноса и/или вращения на основе отслеживания особенности. В данном случае информация об отслеживании положения ультразвукового измерительного преобразователя 52 является информацией о переносе и/или о вращении на основе вектора переноса и/или вращения. Таким образом, перенос и/или вращение особенностей в последовательных во времени объемах 119 B-режима отслеживается, и на основе этого извлекается вектор переноса или вектор вращения. В случае формирования информации об отслеживании положения ультразвукового измерительного преобразователя на основе последовательных во времени объемов B-режима, как показано в варианте осуществления, изображенном на Фиг. 9, обрабатывающий блок 30 объема B-режима должен непрерывно генерировать трехмерные объемы B-режима во время процедуры наведения по изображению (или сканирования тела ультразвуковым датчиком). Таким образом, существуют непрерывные базовые данные объема B-режима для формирования на их основе информации о преобразовании. Это непрерывное формирование также применимо для случая, в котором текущее изображение B-режима, которое будет отображено, является только двухмерным изображением.
Вместо того чтобы использовать отслеживание особенностей во временной последовательности объемов B-режима (то есть отслеживание на основе изображения) для выяснения, на сколько нужно перенести и/или повернуть трехмерную карту 51 сосудов, можно использовать датчик 130 положения, как указано в варианте осуществления, изображенном на Фиг. 10. Вариант осуществления, изображенный на Фиг. 10, таким образом, показывает подход к отслеживанию, основанный на использовании датчика. Как можно видеть на Фиг. 10, датчик 130 положения располагается в фиксированном известном положении относительно ультразвукового датчика 20, имеющего матрицу 21 измерительных преобразователей, например располагается на корпусе датчика 20 или присоединяется к нему. Информация 52 об отслеживании положения ультразвукового измерительного преобразователя является информацией о положении, полученной от датчика 130 положения. Датчик 130 положения может использоваться для отслеживания изменений ориентации и/или положения ультразвукового датчика 20 или матрицы 21 измерительных преобразователей. Если информация об отслеживании положения ультразвукового измерительного преобразователя генерируется на основе датчика положения, как показано в варианте осуществления, изображенном на Фиг. 10, обрабатывающий блок 30 B-режима не должен непрерывно генерировать трехмерные объемы B-режима в том случае, когда текущее изображение B-режима, которое будет отображено, является только двухмерным изображением. Однако, если текущее изображение B-режима, которое будет отображено, является трехмерным изображением, обрабатывающий блок 30 B-режима должен непрерывно генерировать трехмерные объемы B-режима.
Например, датчик положения может быть электромагнитным (EM) датчиком отслеживания или волоконно-оптическим датчиком отслеживания. Понятно, однако, что в большинстве случаев может использоваться любой датчик, который обеспечивает отслеживающую информацию о положении преобразователя. Любой ультразвуковой датчик, имеющий двухмерную матрицу измерительных преобразователей (например, датчик X6-1) и имеющий электромагнитный датчик отслеживания, способен генерировать калиброванный объем B-режима и цветные данные потока.
Теперь соответствующий способ обеспечения ультразвукового изображения с информацией о сосуде будет объяснен со ссылкой на Фиг. 13, которая показывает блок-схему такого способа в соответствии с одним вариантом осуществления, в частности, соответствующего первому основному варианту осуществления и изображенному на Фиг. 3. На первом этапе S1 получается трехмерная карта 51 сосудов. Это делается, в частности, перед или в начале процедуры наведения по изображению. Затем, как указано на этапе S2, трехмерная карта 51 сосудов сохраняется в памяти 50. Затем способ включает в себя этап получения, на этапе S101, ультразвукового сигнала приема, обеспечиваемого ультразвуковым датчиком 20, имеющим матрицу 21 измерительных преобразователей. После этого на этапе S102 на основе ультразвукового сигнала приема формируется объем 31 B-режима и на этапе S103 на основе объема 31 B-режима обеспечивается текущее изображение 41 B-режима. Затем на этапе S104 данный способ включает в себя совмещение предварительно полученной трехмерной карты 51 сосудов, сохраненной в памяти 50, с объемом 31 B-режима. Кроме того, данный способ включает в себя на этапе S105 выбор части 61 трехмерной карты 51 сосудов, соответствующей текущему изображению 41 B-режима. После этого на этапе S106 данный способ включает в себя обеспечение ультразвукового изображения 71 на основе текущего изображения 41 B-режима и выбранной части 61 трехмерной карты 51 сосудов. В одном конкретном примере ультразвуковое изображение 71 может обеспечиваться путем наложения или объединения текущего изображения 41 B-режима и выбранной части 61, как объяснено со ссылкой на пример, изображенный на Фиг. 11. В другом конкретном примере ультразвуковое изображение 71 может обеспечиваться путем помещения текущего (или живого) изображения 41 B-режима и выбранной части 61 рядом друг с другом. Наконец, ультразвуковое изображение 71 с информацией о сосуде может быть затем отображено на дисплее 16 на этапе 107. Эти этапы могут выполняться, например, в одном или более процессорах (например, микропроцессорах).
В целом понятно, что различные (обрабатывающие) блоки, описанные в настоящем документе, могут быть реализованы любым подходящим способом в аппаратных средствах или в программном обеспечении. Любой один или более (обрабатывающих) блоков 25, 30, 40, 60, 70, 90, 78, 80, 95, 120, описанных в настоящем документе, в частности, со ссылкой на любой из вариантов осуществления, проиллюстрированных на Фиг. 3 или на Фиг. 6-10, могут быть реализованы в одном или более процессорах (например, микропроцессорах). Например, обрабатывающий блок 30 объема B-режима, блок 40 обработки изображений B-режима, блок 60 совмещения и опционально блок 70 обработки изображений могут быть реализованы в одном и том же процессоре или во множестве разных процессоров.
Хотя настоящее изобретение было подробно проиллюстрировано и описано в чертежах и предшествующем описании, такую иллюстрацию и описание следует считать иллюстративными или примерными, а не ограничивающими; настоящее изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации раскрытых вариантов осуществления могут быть поняты и реализованы при осуществлении заявленного изобретения специалистами в данной области техники на основе изучения чертежей, описания и приложенной формулы изобретения.
В формуле изобретения словосочетание "включающий в себя" не исключает других элементов или этапов, а формы единственного числа не исключают множественного числа. Единственный элемент или другой блок могут выполнять функции нескольких элементов, упомянутых в формуле изобретения. Тот факт, что некоторые средства упоминаются во взаимно различных зависимых пунктах формулы изобретения, не означает того, что комбинация этих средств не может использоваться для получения выгод.
Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с другими аппаратными средствами или как их часть, но также может распространяться в других формах, таких как через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные обозначения, использованные в формуле изобретения, не должны рассматриваться как ограничивающие объем изобретения.
Реферат
Группа изобретений относится к медицинской технике, а именно к ультразвуковым системам визуализации. Система ультразвуковой визуализации включает ультразвуковой датчик, имеющий матрицу измерительных преобразователей, который обеспечивает ультразвуковой сигнал приема, блок обработки объема B-режима, который генерирует объем B-режима на основе ультразвукового сигнала приема, блок обработки изображений B-режима, обеспечивающий текущее изображение B-режима на основе объема B-режима, блок сегментации сосуда, создающий трехмерную карту сосудов путем выполнения методики сегментации сосуда до вставки инвазивного медицинского устройства во время процедуры наведения по ультразвуковому изображению, память, которая хранит предварительно полученные трехмерные карты сосудов, блок совмещения, совмещающий ранее полученные трехмерные карты сосудов с объемом B-режима и выбирающий части трехмерной карты сосудов, которые соответствуют текущему изображению B-режима, причем блок совмещения выполнен с возможностью получения информации об отслеживании положения ультразвукового измерительного преобразователя для того, чтобы выбрать части трехмерной карты сосудов, соответствующие текущему изображению B-режима, дисплей, отображающий живое ультразвуковое изображение, которое обновляется в реальном времени во время вставки инвазивного медицинского устройства, основанного на текущем изображении B-режима и выбранной части трехмерной карты сосудов, блок обработки изображений, выполненный с возможностью наложения текущего изображения B-режима и выбранной части трехмерной карты сосудов для того, чтобы обеспечить живое ультразвуковое изображение. Способ обеспечения живого ультразвукового изображения с информацией о сосуде выполняется посредством системы ультразвуковой визуализации. Система включает носитель данных для предписания компьютеру выполнять этапы способа. Использование группы изобретений позволяет увеличить частоту кадров. 3 н. и 9 з.п ф-лы, 13 ил.
Комментарии