Анатомически интеллектуальная эхокардиография для места оказания медицинского обслуживания - RU2674228C2
Код документа: RU2674228C2
Чертежи








Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к руководству пользователю по регулировке местоположения и ориентации формирующего изображения зонда и, в частности, к осуществляемому визуально руководству.
УРОВЕНЬ ТЕХНИКИ
Количество страдающих от сердечной недостаточности, которая является очень распространенным заболеванием, составляет пять миллионов человек в одних только Соединенных Штатах и десятки миллионов по всему миру. Исключительно в Соединенных Штатах число людей, подверженных риску сердечной недостаточности, оценивается в 60 миллионов; один миллион госпитализирован, остальные находятся под наблюдением в кардиологических клиниках. Для наблюдения за пациентами в кардиологических клиниках или терапевтических отделениях необходима базовая информация о сердце. Данная информация включает в себя изображения, а также данные количественного анализа, например, о фракции выброса, вычисленные из изображения после того, как оно получено. Ультразвук представляет собой надежную и экономичную методику формирования изображения таких мягких тканей, как сердце.
Для получения ультразвукового изображения необходим квалифицированный сонографист. Сонографист, или другой обладающий навыками в сонографии практикующий врач, оптимизирует такой параметр, как зона видимости. Верхушечный четырехкамерный вид является стандартным видом для плановых проверок сердца. Практикующий врач помещает головку ультразвукового зонда, или «зонда с преобразователем», на пациенте. Нахождение эффективной области на коже пациента для помещения зонда с целью получения различных видов является предметом обучения практикующего врача, и такая область может изменяться от пациента к пациенту. Для получения верхушечного четырехкамерного вида зонд помещается над вершиной сердца. Необходимо также вручную наклонять зонд, обычно в различных направлениях, пока орган не будет захвачен для формирования изображения. Все это делается в интерактивном режиме при просмотре практикующим врачом изображения на экране, которое обычно является сонограммой. Толкование сонограммы является навыком, который необходимо развивать, например, через обучение и практику. Опыт практикующего врача подсказывает ему или ей, в продолжающемся итеративном процессе, как сдвинуть и наклонить зонд, чтобы достигнуть эффективного акустического окна.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Ниже в данном документе представлено предложение, направленное на решение одной или более из вышеупомянутых проблем.
В кардиологических клиниках и терапевтических отделениях затруднительно получить доступ к полному ультразвуковому сканированию. В таком случае на помощь может придти переносная ультразвуковая система. Однако, несмотря на то, что большинство кардиологов способно использовать традиционную переносную ультразвуковую систему, они обычно очень заняты, чтобы выполнять данную процедуру самостоятельно.
Кроме того, формирование последовательных изображений, при котором изображения сердца делаются периодически, например, улучшило бы лечение пациента.
Поэтому необходимо решение для места оказания медицинского обслуживания, которое предоставит возможность автоматического основанного на ультразвуке объемного измерения сердца в течение регулярного визита пациента и которое будет особенно полезно в кардиологических клиниках. Обученная размещению ЭКГ-электродов медсестра, но без навыков в эхокардиографии, сможет управлять переносной системой, а кардиологу будут предоставлены диагностические изображения совместно с автоматическими измерениями, такими как размер желудочка и фракция выброса.
Такая технология снизит барьеры для использования ультразвуковых данных для диагностических и последующих обследований сердца.
В соответствии с одним вариантом выполнения настоящего изобретения, устройство включает в себя формирующий изображение зонд. Оно дополнительно включает в себя процессор руководства пользователю, выполненный с возможностью динамического составления представления визуальной обратной связи для руководства ручной регулировкой, посредством зонда, местоположения и ориентации, относящихся к зонду. Данное составление выборочно основано на сравнениях между зонами видимости зонда и соответствующими результатами сегментации данных изображения, полученных посредством зонда.
В одном подварианте выполнения составление включает в себя представление обратной связи. Обратная связь включает в себя команды пользователю по ручному маневрированию зондом.
В дополнительном подварианте выполнения обратная связь не включает в себя полутоновое воспроизведение данных изображения, полученных посредством зонда.
В еще одном подварианте выполнения устройство выполнено с возможностью вычисления преобразований системы координат, соответствующих соответственным сравнениям.
В первом дополнительном подварианте выполнения вычисление динамически основано на упомянутых результатах.
Во втором дополнительном подварианте выполнения выбор соответственно основан на амплитудах приходящейся на линейное перемещение и вращательной составляющих преобразований.
В третьем дополнительном подварианте выполнения вычисление реагирует на соответствующие приостановки в регулировке.
В связанном подварианте выполнения зонд включает в себя датчик. Устройство выполнено с возможностью принятия решения, на основе вывода датчика, о том, что качество акустической связи недостаточно, и выдачи оповещения пользователю после решения.
В другом связанном подварианте выполнения сегментация основана на модели.
В еще одном связанном подварианте выполнения выбор основан на содержимом формирования изображения, динамически получаемого посредством зонда, и динамически реагирует на него.
В одном частном подварианте выполнения формирующий изображение зонд является или включает в себя формирующий ультразвуковое изображение зонд.
В более общем подварианте выполнения представление динамически руководит пользователем в процедуре достижения верхушечного вида сердца.
В качестве добавленного подварианта выполнения по меньшей мере одна из упомянутых зоны видимости является трехмерной.
В другом подварианте выполнения получение данных изображения, подлежащих сегментации, происходит соответственно из зон видимости.
В одном частном подварианте выполнения зона видимости из упомянутых зон видимости имеет точку обзора, совмещенную с упомянутым местоположением. Упомянутая ориентация совмещена с ориентацией обзора зоны видимости.
Водном реализуемом подварианте выполнения устройство дополнительно содержит блок отображения и задействуемый пользователем пульт управления. Устройство выполнено с возможностью: a) получения данных изображения посредством зонда b) сегментации c) отображения обратной связи посредством блока отображения; и d)мобильности, в качестве переносимого вручную блока.
Во еще одном подварианте выполнения выдача оповещения пользователю для остановки регулировки реагирует на содержимое формирования изображения, динамически полученного посредством зонда.
В качестве дополнительного подварианта выполнения устройство выполнено с возможностью обнаружения остановки.
В еще одном дополнительном подварианте выполнения устройство дополнительно выполнено с возможностью, реагируя на обнаружение того, что произошла остановка, выполнения сегментации.
В одном другом конкретном подварианте выполнения устройство выполнено с возможностью осуществления упомянутой сегментации в относительно грубом режиме и в относительно точном режиме. Оно дополнительно выполнено с возможностью выполнения объемного измерения на основе одного или более сегментов, образованных в результате пространственно более точной сегментации. Выполнение измерений реагирует на завершение пространственно более точной сегментации.
В еще одном подварианте выполнения команда на остановку, в качестве части обратной связи, подчинена исходу сравнения между текущим местоположением и текущей ориентацией зонда и местоположением и ориентацией, выведенными из упомянутой сегментации.
В схожем подварианте выполнения обратная связь включает в себя индикатор выполнения общего хода выполнения при получении целевого вида.
Подробности новой технологии осуществляемого в реальном времени руководства управляемой пользовательскими приостановками идентификации акустического окна изложены дополнительно ниже при помощи последующих чертежей, которые не выполнены с соблюдением масштаба.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг. 1 показан вид в перспективе одной формы переносного устройства в соответствии с настоящим изобретением;
На Фиг. 2A и 2B показаны блок-схемы последовательности операций примерной ультразвуковой клинической процедуры в соответствии с настоящим изобретением;
На Фиг. 3 показана концептуальная схема того, как устройство способно руководить, в реальном времени, помещением акустического окна;
На Фиг. 4A и 4B показаны схемы, изображающие примеры схем для предотвращения затенения при формировании изображения, в которых используются экранные руководствующие изображения сегментов, размещенных по отношению к зоне видимости ультразвукового зонда, в соответствии с настоящим изобретением;
На Фиг. 5 показана блок-схема последовательности операций способа и список формул, относящихся к Фиг. 4A;
На Фиг. 6A, 6B и 6C показаны, соответственно, примерные графики радиочастотных данных, используемых для отличия легочной ткани от сердечной ткани, и алгоритм, используемый при осуществлении данного отличия, в соответствии с настоящим изобретением;
На Фиг. 7 показана блок-схема последовательности операций, представляющая собой примерный алгоритм идентификации легких на основе одномерного зонда; и
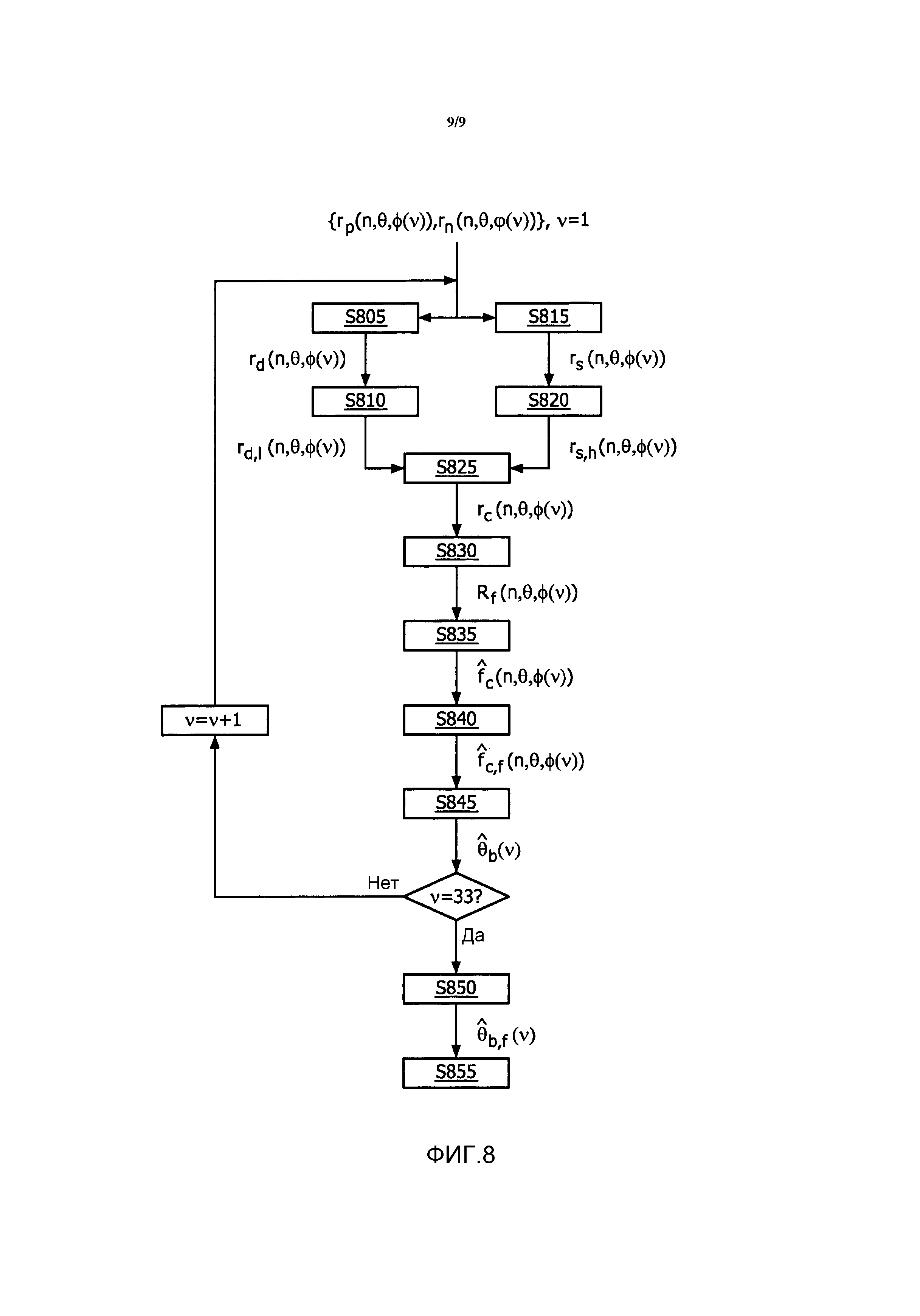
На Фиг. 8 показана блок-схема последовательности операций, представляющая собой примерный алгоритм идентификации легких на основе матричного зонда.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На Фиг. 1 показано переносное устройство 100 в качестве одного примера варианта реализации новой технологии осуществляемого в реальном времени руководства управляемой пользовательскими приостановками идентификации акустического окна, предложенной в данном документе. Несмотря на то, что изображенный в данном документе форм-фактор легко переносим из комнаты в комнату в клинических условиях, устройство 100 вместо этого может быть реализовано в качестве стационарного устройства. Устройство 100 включает в себя блок 110 отображения, пользовательский пульт120 управления, зонд 130 для трансторакальной эхокардиографии (TTE) и кабель 140 зонда увеличенной длины, представленный прерывистыми линиями на Фиг. 1. Блок 110 отображения и пользовательский пульт управления могут быть подобны тем, что используются в переносном компьютере. При общем весе приблизительно в 10 фунтов блок 100 можно переносить вручную. В описании ниже рассмотрена ультразвуковая система, несмотря на это любой вид управляемой вручную, основанной на формирующем изображение зонде системы охватывается предполагаемым объемом изобретения. Кроме того, несмотря на то, что объемный количественный анализ и формирование в реальном времени трехмерного изображения являются признаками приведенного ниже варианта осуществления, все, что предложено в данном документе, также применимо и к формированию двумерного изображения.
Устройство 100 выполнено для использования ультразвука с целью выполнения формирования объемного изображения, такого как вычисление размера левого желудочка сердца или вычисление фракции выброса. Результаты вычислений хранятся в запоминающем устройстве (не изображено). Полученное посредством зонда 130 формирование изображения в реальном времени, на котором основываются вычисления, также хранится в запоминающем устройстве. Схемы (не изображены) для таких стандартных функций, как динамическое формирование луча, преобразование сканирования и визуализация изображения, также содержатся внутри устройства 100. Для автоматического обнаружения затенения изображения могут содержаться два или более формирователя луча, которые дополнительно обсуждены ниже. Дополнительные схемы (не изображены) включают в себя процессор руководства пользователю, выполненный с возможностью динамического представления визуальной обратной связи, то есть, команд пользователю. Они представляют собой тип команд, специально предназначенных для руководства ручной регулировкой, посредством зонда 130, местоположения и ориентации, относящихся к зонду, и соответственно акустического окна. Процессор динамически составляет представление и выборочно составляет его для руководства пользователем и в соответствии с «обновлениями» к соответствующим трехмерным зонам видимости. Обновление является новой зоной видимости, которая предложена одним или более сегментами, созданными посредством сегментации изображения в текущей зоне видимости зонда. Модель, на которой основана сегментация, обеспечивает новую зону видимости на основе ориентации и положения сегмента(ов). Данная новая зона видимости, при сравнении с текущей зоной видимости зонда, служит руководствующим ориентиром в уведомлении практикующего врача, не обученного сонографии, о том, как дальше манипулировать зондом 130. Процессор выдает все команды пользователю о том, как вручную маневрировать зондом 130 с целью итеративного достижения оптимального акустического окна.
Как только достигнуто целевое акустическое окно, сегментации уже не нужно быть столь подробной для вышеописанного «управления» зоной видимости, какой она необходима для количественного анализа. Пример основанной на модели сегментации, которая использует грубую и точную сетки, найден в публикации принадлежащего правообладателю данного документа патента США 2009/0202150 под авторством Фрадкина (Fradkin) и др. («решение Фрадкина»). Критерий окончания адаптации в решении Фрадкина может быть установлен в представленном варианте осуществления устройства 100 для поддержания сегментации грубой для управления зоной видимости или может быть установлен в представленном варианте осуществления для перехода к точной сегментации для основанного на объемных данных количественного анализа. Управление и количественный анализ дополнительно обсуждены ниже.
С целью определения местоположения изображения для сегментации устройство 100 дополнительно выполнено с возможностью выполнения обобщенного преобразования (GHT) Хафа. Способ выполнения GHT обсуждается в публикации принадлежащего правообладателю данного документа патента США № 2008/0260254 под авторством Шрамма (Schramm) и др.
Раскрытие обеих публикаций полностью включено в данный документ посредством ссылки.
Устройств 100 дополнительно имеет возможность обнаружения движения зонда 130. Пользователю следует часто приостанавливать перемещение зонда для того, чтобы могла произойти сегментация изображения. Кроме того, устройство 100 будет проверять, произошло ли уже следование команде на приостановку, например, вследствие того что зонд 130 близок к достижению целевого акустического окна. В одном варианте осуществления устройство 100 включает в себя вычислитель 80 приращения, раскрытый в принадлежащем правообладателю данного документа патенте США № 5,529,070 под авторством Аугустина (Augustine) и др. («решение Аугустина»). Посредством кабеля 140зонда в вычислитель 80 приращения подаются значения, которые поступают от акселерометров (не изображены), находящихся в зонде 130. В отличие от решения Аугустина позиционное считывание ненужно согласовывать с получением изображений. Таким образом, вычислитель приращения может быть упрощен для обнаружения только перемещения в местоположении и/или ориентации зонда 130. Акселерометры могут быть распределены между дистальной и проксимальной частями зонда 130, как это видно на Фиг. 4, 5 и 5a в решении Аугустина. Все раскрытие в решении Аугустина, относящееся к варианту осуществления акселерометра, включено в данный документ посредством ссылки. Альтернативно, пример использования электромагнитных (EM) датчиков в отслеживании медицинского инструмента предложен в публикации принадлежащего правообладателю данного документа патента США № 7,933,007 под авторством Стэнтона (Stanton) и др. Подобная система, которая также прикрепляется к инструменту с оптическим датчиком, раскрыта в публикации принадлежащего правообладателю данного документа патента США 2010/0168556 под авторством Шена (Shen) и др. Движение также может быть распознано посредством сравнения последовательных формируемых в реальном времени изображений, как это описано в принадлежащем правообладателю данного документа патенте США № 6,299,579 под авторством Петерсона (Peterson) и др. Все три документа во всей своей полноте включены в данный документ посредством ссылки.
Вышеупомянутые функции, с возможностями которых выполнено устройство 100, могут быть реализованы с помощью любого подходящего и известного сочетания программного обеспечения, встроенного микропрограммного обеспечения и аппаратного обеспечения. Процессор руководства пользователю может быть реализован, например, в устройстве, имеющем одну или более интегральных схем или в качестве соответственно запрограммированного считываемого компьютером носителя.
Зонд 130 имеет головку 150, содержащую матричную антенную решетку 160, которая включает в себя преобразовательные элементы 170. Несмотря на то, что, для простоты, на Фиг. 1 изображено относительно малое количество элементов 170, их количество может обычно составлять тысячи. Кроме того, несмотря на то, что антенная решетка 160 изображена в целом прямоугольной, она может быть квадратной, круглой, овальной или другой формы. Она также может быть плоской, как линейная антенная решетка, или изогнутой, как секторная антенная решетка.
На блоке отображения 110 в иллюстративных целях изображена визуальная обратная связь 144,специально предназначенная для руководства ручной регулировкой, посредством зонда 130, местоположения и ориентации антенной решетки. Преимущественно, при руководстве не обученному сонографии пользователю не нужно полагаться на полутоновые изображения, такие как сонограммы. Поэтому не приходится полагаться на функции (GSDF)полутонового отображения, как это представлено экранным пояснением 175, которое перечеркнуто и изображено на Фиг. 1. В частности визуальная обратная связь 144 варианта осуществления, изображенного на Фиг. 1, не включает в себя полутонового воспроизведения данных изображения, полученных посредством зонда 130. Другим примером визуальной обратной связи 144 является экранная полоса 178 общего хода выполнения. Она может быть снабжена пояснением в виде процентов, например «82%», либо она может заполняться в ходе выполнения и может быть ограниченна рамкой, которая представляет собой 100%, то есть, завершение.
Зонд 130 также имеет пару указывающих приостановку/продолжение ламп 180(одна из которых видна на Фиг. 1, а другая находится на противоположной стороне зонда), реализуемых в качестве красно-зеленых светодиодов (LED). При зеленом свечении лампа 180 указывает то, что пользователю следует посмотреть на блоке отображения 100 предписания и затем продолжить перемещать зонд 130 согласно командам. При красном свечении лампа 180 указывает то, что пользователю следует приостановить перемещение зонда 130. Обе лампы одновременно имеют один и тот же цвет.
В качестве альтернативы лампам 180, или в качестве варианта реализации дополнительных ламп, могут быть выполнены указывающие направление лампы. В данном альтернативном варианте осуществления, когда свечение одной лампы является зеленым, то свечение другой является красным. При зеленом свечении лампа указывает то, что пользователю следует сдвинуться в направлении луча зеленой лампы. Устройство 100 сможет само определить, что зонд 130 действительно помещен вдоль межреберного промежутка между двумя ребрами, в настоящее время окружающих матричную антенную решетку 160, как это обсуждается дополнительно ниже. Наоборот, при красном свечении лампа указывает, что пользователю следует сдвинуться в противоположном направлении. Альтернативно или в дополнение, команда на сдвиг и направленность может появиться на блоке 110 отображения.
Зонд может также включать в себя датчик качества акустической связи (не изображен). Среди преобразовательных элементов 170, то есть, замещая отдельные элементы, пространственно распределены датчики 190 давления, предназначенные для обнаружения давления. Обнаружение чередуется с получением изображений. Когда задействованы преобразовательные элементы 170 вблизи датчика 190 давления, и считывание датчика давления выражает отсутствие давления, то это указывает на слабую акустическую связь. В более общем смысле, если и когда устройство 100 принимает решение, на основе вывода датчика качества акустической связи, о том, что качество акустической связи является недостаточным, то после такого решения пользователю выдается оповещение. Могут быть предоставлены визуальные или звуковые оповещения пользователю посредством зонда 130 или других частей устройства 100. В качестве одного примера, датчик качества акустической связи может содержать только 8 датчиков 190давления, которые размещены среди 10 000 преобразовательных элементов 170.
На Фиг. 2A и 2B показана, посредством иллюстративного, а неограничительного, примера, клиническая ультразвуковая процедура 200, демонстрирующая то, как устройство 100 визуально руководит медсестрой или другим пользователем, не обученными сонографии. В данном варианте осуществления должен быть записан четырехкамерный верхушечный вид сердца для формирования изображения, и должны быть проведены и сохранены объемные кардио-измерения. Процесс состоит из двух стадий. На первой стадии пользователь перемещает зонд 130, пока формирование изображения не обнаружит по меньшей мере часть сердца, или другого интересующего органа. На второй стадии пользователь перемещает зонд 130, часто приостанавливаясь и принимая дополнительные команды вскоре после каждой приостановки. Иногда устройство 100 определяет, что должен быть совершен переход со второй стадии обратно на первую стадию. Успешное завершение ультразвуковой процедуры 200 происходит в течение, то есть, в конце, второй стадии.
В процессе эксплуатации сначала медсестра помещает электрокардиограммные (ECG) электроды на пациента или ультразвуковой предмет, человека или животное (этап S202). ECG будет служить в качестве части сердечной проверки. Она также содействует анализу формирования в реальном времени сердечных изображений, которое будет записано. Вначале пользователь в целом инструктируется о формировании изображений, которое должно быть сделано, о том, что команды будут видны на блоке 110 отображения и посредством ламп 180, о том, что необходимо будет быстро остановить перемещение зонда 130 при получении команды, и о том, что при получении команды на перемещение зонда необходимо будет часто приостанавливаться для того, чтобы система смогла произвести считывание (этап S204). Кроме того, в качестве части инициализации происходит очищение флагавторой стадии, поскольку первоначально пользователь находится на первой стадии процедуры 200. Затем пользователю поступает команда на уложение пациента на его или ее левую сторону так, чтобы сердце придвинулось вперед в груди пациента для более легкого формирования изображения (этап S206). Пользователю поступает команда на начало с нижней части грудной клетки в точке под левым соском и на произведение подсчета до попадания между четвертым и пятым ребрами от нижней части грудной клетки (этап S208) в точку, в которую следует поместить головку 150 зонда 130 для начального акустического окна. Получение изображений зондом осуществляется в реальном времени и непрерывно. Команды также упоминают о том, что зонд следует наклонить вверх, чтобы он указывал в направлении основания шеи пациента, в качестве первой оценки. Теперь команда заключается в следующем: запомнить размещение, убрать зонд 130; нанести контактный гель вокруг лицевой поверхности зонда, покрывающей матричную антенную решетку 160; и восстановить размещение зонда по отношению к местоположению и по отношению к ориентации (этап S210). Если, посредством алгоритма идентификации затенения, обсуждаемого дополнительно ниже, никаких ребер не обнаружено (этапы S212, S214), то происходит возвращение на этап S206. В противном случае, если обнаружено только одно ребро (этап S214), то пользователю поступает команда на малый сдвиг вверх или вниз для попадания между двумя ребрами (этап S216). На экране может быть отображено графическое воспроизведение зонда, нацеленного на одно ребро и сдвигаемого вверх/вниз до помещения между двумя ребрами. Обработка возвращается на этап S212. В данном цикле обработки, и во всех циклах обработки, которые вовлекают выдачу команды пользователю, команда не попадает в список заново, если она уже изображена на экране. Если, с другой стороны, обнаружены оба ребра, то проверяется достоверность данного аспекта правильного помещения зонда. Выполняется запрос в отношении того, затеняет ли легкое текущую зону видимости зонда 130(этап S218). Данное определение осуществляется посредством алгоритма идентификации затенения, обсуждаемого дополнительно ниже. Если легочная ткань находится в зоне видимости (этап S218), то пользователю поступает команда на то, чтобы пациент сделал выдох и удержал свое дыхание (этап S220). Это может вызвать уход легкого из зоны видимости, так как легкое может входить в зону видимости и выходить из нее с каждым вдохом и выдохом пациента. Если легкое снова обнаружено и поэтому по-прежнему затеняет зону видимости (этап S222), то пользователю поступает команда на восстановление пациентом нормального дыхания (этап S224). Так как легкое, затеняющее сердце, является левым легким, и так как по сравнению с сердцем легкое расположено дальше от центра груди, то пользователю поступает команда на сдвиг зонда 130 вверх, то есть, к грудине (этап S226). Указывающая приостановку/продолжение лампа 180 на зонде 130 будет зеленой. Также пользователю может быть сказано немного наклонить зонд 130, чтобы лучше нацелиться на левую сторону пациента при сдвиге зонда вверх. Осуществляется возвращение на этап S212. Альтернативно или в дополнение, пользователю может быть показано экранное отображение в виде перевернутой «V», посредством чего пользователь может в интерактивном режиме сдвинуть и наклонить зонд 130, чтобы избежать легкого. То же самое отображение в виде «V» может использоваться для предписания пользователю наклонить и переместить зонд, чтобы избежать ребер. Если, с другой стороны, после того, как пациент задержал свое дыхание (этап S220), легкие больше не затеняют зону видимости (этап S222), или если легкие первоначально не затеняли (этап S218), то выполняется запрос относительно того, обнаружена ли по меньшей мере часть сердца в формировании в реальном времени изображения посредством зонда 130 (S228). Для данного обнаружения используется упомянутая выше GHT из решения Шрамма. Несмотря на то, что левый желудочек (LV) может быть частью сердца, для которого требуется количественный анализ, обнаружение части сердца может вовлечь даже обнаружение только левого предсердия, или митрального клапана, например. При решении о том, что произошло обнаружение, должен быть удовлетворен предварительно определенный уровень достоверности. Например, в решении Шраммаможет потребоваться, чтобы измерение оптимальности при определении набора параметров преобразования удовлетворяло предварительно определенной пороговой величине.
Если сердце не обнаружено (S228), то пользователю поступает команда «Медленно сдвигаться вниз от грудины, медленно сдвигаться вверх к грудине, каждый раз в большей степени». Графическое воспроизведение движения шаблона может быть отображено на блоке 110 отображения (этап S230). Процедура 200 возвращается обратно на этап S212.
Если, с другой стороны, часть сердца обнаружена (этап S228), то выполняется запрос в отношении того, установлен ли флаг второй стадии, который был очищен в течение инициализации на этапе S204, (этап S232). Если он не установлен (этап S232), пользователю поступает команда на приостановку и ожидание команд (этап S234). Приостановка необходима, потому что сегментации, даже грубой сегментации, требуется короткий период времени, например, две секунды. В частности, указывающие приостановку/продолжение лампы 180 на зонде 130 станут красными и/или блок 110 отображения изобразит, в красном цвете, команду на приостановку. Также может быть выдан короткий звуковой сигнал. Устройство 100 обнаруживает, посредством акселерометров в зонде 130, приостановилось ли движение зонда (этап S236). Пока перемещение не приостановлено (этап S236), сохраняется выдача визуальной и звуковой обратной связи на приостановку (этап S238). Когда приостановка обнаружена (этап S236), снова осуществляется проверка в отношении того, обнаружена ли часть сердца (этап S240). Данная предосторожность предпринимается с целью определения того, достаточно ли быстро пользователь выполнил приостановку, чтобы по-прежнему формировать изображение части сердца.
Если обнаружение части сердца больше не существует (этап S240), то поступает команда (этап S242) «Медленно повторите в обратном порядке свое последнее перемещение и приостановитесь при поступлении команды для восстановления (частичного) вида сердца... иначе выполните сдвиг согласно команде». Затем осуществляется возвращение на этап S212.
С другой стороны, если по меньшей мере часть сердца все еще обнаруживается (этап S240), то выполняется (этап S244) грубая сегментация изображения физического органа, в данном случае сердца, с использованием некоторой модели (этап S245).
При условии, что устройство 100 имеет возможность электронного управления, теперь выполняется запрос в отношении того, находится ли все сердце, по оценке из сегмента(ов), внутри текущей зоной видимости зонда 130 (этап S246).
Если все сердце не находится внутри текущей зоной видимости (этап S246), или если у устройства 100 отсутствует возможность электронного управления, то осуществляется вычисление преобразования системы координат (этап S247). В частности сегментация создает один или более сегментов сердца, имеющих местоположение и ориентацию в пространстве изображения зонда 130. Местоположение и ориентация известны из упомянутой модели. На основе местоположения и ориентации определяется то, какими будут оптимальная точка обзора и ориентация обзора для геометрически-стационарной области видимости зонда, которая покрывает все исследуемое сердце или исследуемый участок сердца, например, левый желудочек. Например, как митральный клапан, так и вершина сердца могут быть идентифицированы посредством сегментации, и соединяющая их ось может быть, или может быть близка к, оптимальной ориентации обзора для количественного анализа и диагностических изображений сердца. Зона видимости является геометрически фиксированной, потому что предполагается, что пользователь не обучен сонографии и, для простоты, ему поступает руководство только на перемещение зонда согласно визуальным командам. Выведенные оптимальная точка обзора и ориентация обзора будут, в целом, отличаться от текущей точки обзора и текущей ориентации зонда. Точки обзора и ориентации обзора все находятся в пространстве изображения зонда 130. Устройство 100 вычисляет преобразование системы координат, которое совместит текущую точку обзора и ориентацию с выведенной оптимальной точкой обзора и ориентацией.
После вычисления преобразования обновляется экранная полоса 178 общего хода выполнения (этап S248).
Ход выполнения основан на амплитуде приходящейся на линейное перемещение составляющей преобразования и, в меньшее степени или на более поздней стадии, на амплитуде вращательной составляющей преобразования.
Длина полосы 177 хода выполнения поэтому может составлять, в процентном отношении, 100 минус взвешенное среднее значение двух составляющих, которое является неотрицательным и меньше единицы.
Та же самая или подобная метрика используется устройством 100 для принятия решения о том, достаточно ли точен текущий вид для начала количественного анализа и в качестве дополнительной возможности получения формирования в реальном времени изображения для хранения. Альтернативно или в дополнение, устройство 100 может определять, на основе упомянутой модели, находится ли сердце, или участок сердца, полностью или достаточно внутри текущей зоны видимости зонда 130 (этап S249).
Если на этапе S249 определено, что текущая зона видимости зонда 130 не достаточно близка к оптимальной зоне видимости, то принимается решение в отношении того, преобладает ли наклон ли или сдвиг в качестве выбора для следующей команды пользователю (этап S250). В целом, сдвиг будет преобладать, если имеют место остатки; хотя, если оставшаяся часть достаточно мала, то может быть достаточно наклона. Параметры для принятия решения могут быть установлены опытным путем. Двигаясь далее от данной части процедуры 200, осуществляется динамическое составление представления пользователю визуальной обратной связи 144 выборочно на основе сравнения между текущей зоной видимости зонда 130 и выведенной оптимальной точкой обзора и ориентацией обзора с этапа S247. Например, оно основано на необходимости в сдвиге и/или наклоне, причем такие потребности оцениваются на основе сравнения. По сути происходит выбор в отношении того, какая из команд пользователю, упоминаемых ниже, выдается в процедуре 200. В данном случае следует отметить, что составление представления визуальной обратной связи 144 ранее в процедуре 200, например на этапах S212-S228, осуществляется динамически и выборочно и основано на полученном содержимом изображения, а не на вышеупомянутом сравнении. Поэтому, некоторое, но не все, динамическое, выборочное составление визуальной обратной связи 144 в процедуре 200 основано на сравнении.
Если преобладает сдвиг (этап S250), то выполняется запрос в отношении того, вовлечет ли указанное преобразование пересечение ребра для входа в смежное межреберное пространство, учитывая положение ребер (этап S251). Устройству 100 известно положение ребер через алгоритм идентификации затенения, упомянутый выше относительно этапов S212 и S214 и дополнительно обсуждаемый в данном документе ниже. Если преобразование не выполнимо (этап S251), то пользователю соответственно поступает команда на, после повторного нанесения контактного геля на зонд 130, перемещение вверх или вниз по грудной клетке (этап S253). Осуществляется очищение флага второй стадии, и обработка возвращается на этап S210. Если, с другой стороны, преобразование выполнимо (этап S251), то пользователю поступает команда на медленный сдвиг в определенном устройством 100 направлении с частыми приостановками (этап S254). Таким образом, данная команда пользователю является одной из команд, динамически и выборочно составляемых на основе вышеупомянутого сравнения.
Если, с другой стороны, сдвиг не преобладает на этапе S250, то пользователю поступает команда на медленное наклонение зонда 130 в определенном направлении (этап S255). Данная команда может заключаться в следующем:«наклоняйте, медленно нацеливаясь вовнутрь к грудине с частыми остановками» или «наклоняйте, медленно нацеливаясь вниз к ногам пациента с частыми остановками»;в некотором сочетании этих двух команд и т.д. Таким образом, данная команда является одной из команд, динамически и выборочно составляемых на основе вышеупомянутого сравнения.
Альтернативно или в дополнение, блок 110 отображения может показать интерактивное графическое воспроизведение сегментированного органа, в данном случае сегменты задают сердце, в качестве сегментированного экранного объекта с помощью отображения в виде наложенной, перевернутой «V», представляющим собой зону видимости зонда 130. Второе, отдельное, одновременное воспроизведение может быть показано для отображения в виде «V» в ортогональном направлении. Данное графическое воспроизведение обсуждается дополнительно ниже.
После выдачи команды либо для этапа S254,либо для S255, выполняется запрос в отношении того, произошло ли перемещение начиная с этапа S236. Оно может быть определено посредством акселерометров в зонде 130. Если такое перемещение произошло, и если сейчас какое-либо перемещение отсутствует (этап S256), то устанавливается флаг второй стадии (этап S257), и обработка возвращается на этап S212.
Если, с другой стороны, на этапе S249 определяется, что текущая зона видимости зонда 130 достаточно близка к оптимальной зоне видимости, то устройство 100 выдает команду на остановку (этап S258). В частности, указывающие приостановку/продолжение лампы 180 на зонде 130 станут красными, и/или блок 110 отображения покажет, в красном цвете, команду на остановку. Также может быть выдан короткий звуковой сигнал. Устройство 100 обнаруживает, посредством акселерометров в зонде 130, остановилось ли движение зонда, то есть, приостановилось или закончилось (этап S260). Пока перемещение не остановлено (этап S260), поддерживается выдача визуальной и звуковой обратной связи (этап S262). Как только перемещение остановлено (этап S260), выполняется запрос, как на этапе S249, в отношении того, достаточно ли точно текущее представление для начала количественного анализа и в качестве дополнительной возможности получения формирования в реальном времени изображения для хранения (этап S264). Если текущий вид не является, то есть, больше не является, точным (этап S264), полоса 178 хода выполнения соответственно сокращается с целью отражения неудачи в ходе выполнения к завершению процедуры 200 (этап S266). Команда предписывает пользователю медленно повторить в обратном порядке свое последнее перемещение с частыми приостановками (этап S268). Обработка переходит на этап S257. Если, с другой стороны, текущее представление достаточно точно для начала количественного анализа и в качестве дополнительной возможности получения формирования в реальном времени изображения для хранения (этап S264), то пользователю поступает уведомление об удержании зонда неподвижным для завершения процедуры 200 (этап S270). Для количественного анализа выполняется точная сегментация (этап S272). С этой целью используется упомянутая модель (этап S274). Устройство 100 начинает запись формирования в реальном времени изображения сердца или участка сердца (этап S276). Если устройство 100 включает в себя возможность электронного управления, то из записи могут быть проиграны различные виды сердца, например главные проекции. Устройство также выполняет объемные измерения из сегментации (этап S278). Например, вычисляется размер левого желудочка (LV), за сердечный цикл, посредством, например, нахождения средней или максимальной длины и нахождения средней или максимальной ширины. Схожим образом вычисляется фракция выброса посредством обнаружения, за сердечный цикл, максимального и минимального объема LV, и взятия соотношение этих двух величин. Данные количественного анализа сохраняются в запоминающем устройстве (этап S280).
Если, с другой стороны, все сердце находится внутри текущей зоной видимости (этап S246), и если устройство 100 имеет возможность электронного управления, то полоса 177 хода выполнения будет отражать близкое завершение (этап S282). На этапе S284 дается команда на остановку. Во время обнаружения перемещения зонда 130 (этап S286), поддерживается выдача оповещения пользователю на остановку (этап S288). Как только обнаружено, что зонд 130 остановлен (этап S286), снова выполняется запрос в отношении того, все ли сердце находится в зоне видимости (этап S290). Если все сердце по-прежнему находится в зоне видимости (этап S290), то обработка переходит на этап S270 с целью предписания пользователю приостановиться для завершения процедуры 200. В противном случае, если все сердце больше не находится внутри зоны видимости (этап S290), то обработка переходит на этап S266 для попытки восстановления изображения всего сердца.
На Фиг. 3 концептуально показано то, как устройство 100 способно руководить, в реальном времени, помещением акустического окна. Зонд 302 удерживается рукой 304 практикующего врача на коже 306 пациента. Более конкретно, зонд 302 имеет головку 308, которая имеет лицевую поверхность 310 для помещения на кожу 306, отделенной от кожи только средой для акустической связи, такой как специализированный гель. Внутри головки 308 и вдоль лицевой поверхности 310 находится матричная антенная решетка 312. От матричной антенной решетки 312 простирается зона314 видимости. Сердце 316 пациента частично, в данном случае по большей части, находится внутри зоны314 видимости, изображение которого формируется посредством зонда 302. Так как часть сердца 316 обнаружена с достаточным уровнем достоверности, то практикующему врачу поступила команда на приостановку и сделать ее по возможности быстро. В результате сегментации изображения на сегменты 318, устройство 100 определяет, посредством упомянутой модели, ориентацию 320, которая обеспечит оптимальный, или целевой, вид сердца 316, если зонд 302, или некоторая часть зонда, такая как матричная антенная решетка 312, принял такую ориентацию из соответствующего местоположения 318. Модель также обеспечивает местоположение 318. Для простоты объяснения, изогнутая стрелка 321 на Фиг. 3 начинается в местоположении 322 и ориентации 324 зонда 302. Она заканчивается в обеспеченном моделью местоположении 318 и обеспеченной моделью ориентации 320, которые выводятся из сегментации изображения. Изогнутая стрелка 321 представляет собой сравнение зоны 314 видимости с обеспеченными моделью местоположением и ориентацией 318, 320. Сравнение включает в себя преобразование системы координат, которое совместит обеспеченные моделью местоположение и ориентацию 318, 320 с текущим местоположением 322 и текущей ориентации 324 зонда 302. Преобразование имеет приходящуюся на линейное перемещение составляющую 326 и вращательную составляющую 328. Визуальная обратная связь 144 в процедуре 200 выбирается на основе амплитуды составляющих 326, 328, как, например, на этапах S248, S249 и S264 в Фиг. 2A и 2B. Другая изогнутая стрелка 330 на Фиг. 3 показывает руку практикующего врача 304, маневрирующую зондом 302, на основе обратной связи 144, к верхушечному виду 332.
В изображенном примере сердце 316 частично находится вне текущей зоны 314 видимости. Электронное управление в благоприятную зону видимости, соответствующую верхушечному виду 332, все еще не захватило содержимое для формирования изображения, которое находилось вне видимости до электронного управления. Соответственно, полагание на электронное управление в изображенном примере для сокращения процедуры 200 может негативно сказаться на результате, в зависимости от влияния потери такого конкретное содержимое изображения.
Если, однако, Фиг. 3 была бы перерисована с сердцем 316, полностью находящимся внутри текущей зоны314 видимости, то электронное регулирование продолжалось бы, как описано выше, при условии, что устройство 100 имеет возможность электронного управления. Таким образом, верхушечный вид 332 достигается без маневрирования зондом 302, которое представлено изогнутой стрелкой 330. Вместо этого он достигается посредством электронного управления. Несмотря на то, что ручное маневрирование зондом 203 могло потребоваться ранее в упомянутой процедуре для достижения обнаружения части сердца 316 (этап S228), электронное управление может, после того, как сердце оказалось в зоне видимости, уменьшить потребность в дополнительном ручном маневрировании зондом.
Преимущественно, пользователю поступает руководство на протяжении всей процедуры для достижения верхушечного вида сердца.
Как упомянуто в данном документе выше, обнаружение того, что ребра, ограничивающие текущее межреберное пространство, находятся внутри зоны видимости, является частью проверки достоверности того, что текущее акустическое окно, помещенное в процесс поиска оптимального акустического окна, достоверно. Команды пользователю о том, как маневрировать зондом около легких с целью получения вида сердца, также упоминаются в данном документе выше.
Эхокардиография представляется сложной задачей, так как сердце окружено ребрами и легочной тканью. Ультразвук едва ли может проникать через содержащие соли кальция ребра (обычно встречающиеся в верхушечном виде) и легочную ткань вследствие сильного рассогласования акустического сопротивления между ними и другими мягкими тканями. Кроме того, поглощение ультразвука в ребрах довольно высоко по сравнению с тканью. Традиционно, оптимизация качества ультразвукового изображения выполняется исключительно пользователем на основе отображаемых в реальном времени полутоновых ультразвуковых изображений на экране. Несмотря на то, что опытные пользователи обычно могут распознавать ухудшение изображения и соответственно улучшать качество изображения через перемещение зонда в лучшее положение, менее опытные пользователи могут получить дефектные изображения вследствие худшей зрительно-моторной координации и худшего понимания искажений. Успешное ультразвуковое сканирование сильно полагается на знания и опыт пользователя. Чтобы помочь неопытным или менее опытным пользователям получить содержательную информацию от сердца с использованием эхокардиографии, требуется анатомически интеллектуальная ультразвуковая система.
Так как ультразвук едва ли может проникать через содержащие соли кальция ребра, глубокое эхо ультразвукового луча, сталкивающееся с содержащими соли кальция ребрами, очень маловероятно будет отражаться от тканей под ребром. Скорее оно может быть подхвачено боковыми лепестками. Визуальное искажение распознается опытным сонографистом, просматривающим (полутоновую) сонограмму, однако может легко не распознаваться неопытным пользователем.
Кроме того, чтобы неопытному пользователю получить хорошее качество изображения, ультразвуковая система должна знать о присутствии легочной ткани.
Один алгоритм идентификации затенения, описанный ниже, специализируется на обнаружении легочной ткани, и особенно реберной ткани, затеняющей зону видимости. Второй алгоритм идентификации затенения, описанный ниже, приспособлен специально для обнаружения затенения легочной тканью. Они обсуждаются совместно со следующими чертежами.
На Фиг. 4A и 4B показаны примеры схем для предотвращения затенения при формировании изображения, которые используют экранные руководствующие изображения сегментов, размещенных относительно зоны видимости ультразвукового зонда.
Обе фигуры характеризуют сонограмму. Сонограмма на Фиг. 4A является срезом изображения, который проходит вдоль длины пациента; тогда как, сонограмма на Фиг. 4B является срезом изображения, который проходит вдоль ширины пациента.
Фиг. 4A относится не только к первому алгоритму, но также и к интерактивному отображению в качестве части визуальной обратной связи 144.
Матричная антенная решетка 160 имеет текущую зону 314 видимости, которая частично включает в себя ребра 404, 408 и частично (в данном случае почти полностью) включает в себя сердце 412. Первый алгоритм вычисляет линии 416, 420границы затенения, которые соответствуют границе между хорошими ультразвуковыми лучами и ультразвуковыми лучами, являющимися плохими вследствие затенения ребрами 404, 408.
Для обнаружения затенения используется когерентность канальных данных. Каждый канал доставляет свою соответствующую амплитуду радиочастотных данных, относящуюся к его соответствующему фиксированному преобразовательному элементу 170 или участку элементов. По возвращении ультразвукового эха его вызванное отражением давление на элементы 170 быстро и периодически дискретизируется. Дискретные отсчеты задерживаются по отношению друг к другу согласно оцениваемой геометрии точки обзора для времени прохождения линии визирования. В данном случае«когерентность» означает подобие среди данных, записанных посредством различных каналов антенной решетки после применения вышеупомянутых задержек фокусировки при приеме.
Одним вариантом измерения когерентности является способ основанной на данных суммарных лучей оценки когерентности, например такой, какой описан в публикации патента США № 2009/0141957 под авторством Иена (Yen) и др., все раскрытие которого включено в данный документ посредством ссылки.
Способ оценки может быть приспособлен под обнаружение затенения от ребра и легкого, и продемонстрирован ниже с использованием двух формирователей луча. Пусть sj(r, θ) обозначает (вещественное значение) канальных данных на глубине r, принятых j-ым каналом после применения задержки фокусировки, и пусть C1 и C2 обозначают набор каналов, используемых в первом и втором формирователе луча, соответственно. Вывод с k-ого (k=1, 2) формирователь луча представляет собой bk(r, θ), формула для которого изображена на Фиг. 5. Когда все канальные данные sj(r, θ) идентичны в каналах, то b1(r, θ) и b2(r, θ) будут обладатьсильной корреляцией независимо от выбора C1 и C2. С другой стороны, когда канальные данные главным образом поступают от рассеивателей в областях боковых лепестков, то корреляция между b1и b2 может значительно снизиться, если C1 и C2выбраны должным образом. C1 и C2 могут быть дополнительными друг к другу, чередующимися апертурами. Говоря вкратце, можно отличать сигналы на оси и сигналы вне оси на основе корреляции между b1 и b2. Вывод коррелятора является коэффициентом p(r, θ)корреляции между b1(r, θ) и b2(r, θ), заданных согласно Фиг. 5, где w представляет собой вещественную симметричную функцию взвешивания. Затем p(r, θ) подвергается низкочастотной фильтрации для получения сглаженного отображение

В частном примере данные получаются при частоте дискретизации в 32 МГц в режиме инверсии импульсов с использованием зонда, имеющего 80 элементов 170. Каждый кадр имеет 44 луча, и плотность луча составляет 0,4944 луч/градус. Центральная частота составляет 1,3, и 2,6 МГц на передачу и на прием, соответственно. C1={20-22, 26-28, 32-34, 38-40, 44-46, 50-52, 56-58} и C2={23-25, 29-31, 35-37, 41-43, 47-49, 53-55, 59-61}. Функция w взвешивания, используемая в корреляторе, составляет серию из 51 (в продольном направлении или в r-направлении) на 1 (в поперечном направлении или в θ-направлении) импульсов и сглаживающий фильтр составляет серию из 501 на 3 импульсов. Вследствие периодической структуры апертур, чувствительность коэффициента p корреляции к сигналам вне оси периодически изменяется с направлением сигналов вне оси. Данная периодичность может быть уменьшена посредством придания случайного характера размерам вторичных апертур с сохранением обеих апертур дополнительными друг к другу.
Чтобы проверить, затенен ли луч, производится подсчет количества точек с коэффициентом (
Как показано на Фиг. 4A, при насчитывании 80 каналов слева направо, возможно 20-ый канал имеет первый луч, проявляющий высокую когерентность; тогда как, 19-ый луч не проявляет высокой когерентности. Таким образом, первая линия 416 границы затенения изображена на Фиг. 4A в 19-ом луче. Аналогично, если 59-ый канал проявляет высокую когерентность, а 60-ый канал не проявляет высокой когерентности, то вторая линия 420 границы затенения совмещается с 59-ым лучом.
Верхняя граница диапазона глубин не критична. 72 мм, которые намного больше глубины человеческих ребер в целом, могут быть выбраны в качестве нижней границы, потому что высокие значения коэффициента когерентности могут присутствовать в областях как раз ниже ребра вследствие множественных отражений (или реверберации), и такие отражения имеют тенденцию исчезать с глубиной.
Описанные апертуры не включают в себя каналы на обоих концах полной апертуры. Хотя апертуры могут быть продолжены для включение в себя этих каналов, количество затененных лучей может быть недооценено, если используются большие апертуры. Это происходит потому, что коэффициент корреляции на выходах дополнительных друг к другу апертур по-прежнему может оставаться высоким, если часть больших дополнительных друг к другу апертур не затенена.
Несмотря на то, что вариант осуществления выше использует двумерные (2-D) изображения, полученные с помощью одномерного (1D) зонда, данная методология может быть применена к матричным зондам и, следовательно, к формированию трехмерного (3-D) объемного изображения для руководства начинающими пользователями при выполнении получении объемных результатов.
На Фиг. 4A также показано изображение, которое может быть отображено для интерактивного руководства практикующим врачом. Изображение сердца 412 может быть реализовано в качестве сегмента(ов), задающего(их) сердце на основании грубой сегментации (этап S244). Сердце 412 всего лишь частично находится вне зоны 314 видимости. При осуществлении сдвига практикующим врачом зонда 302 согласно экранной визуальной обратной связи 144 или в виде зеленой лампы 180 на зонде происходит обновления изображения на Фиг. 4A в реальном времени. С легкостью может быть выполнено отображение в виде перевернутой«V», полностью охватывающее необходимый орган, в данном случае сердце. Изображение с Фиг. 4A, в качестве части визуальной обратной связи 144, может дополнить этапы S212, S214 и S255, описанные выше совместно с Фиг. 2A и 2B.
Для оптимизации расположение зонда, размах V может быть увеличен посредством использования отображения в плоскости X.
Аналогично Фиг. 4A, Фиг. 4B относится не только ко второму алгоритму, но также и к интерактивному отображению в качестве части визуальной обратной связи 144.
Матричная антенная решетка 160 имеет текущую зону314 видимости, которая включает в себя сердце 424 и часть легкого 428. Второй алгоритм вычисляет линию 432границы затенения, которая соответствует границе между хорошими ультразвуковыми лучами и лучами, которые является плохими вследствие затенения легким 428.
Во втором алгоритме центральная частота радиочастотных(RF) данных, полученных в режимы инверсии (PI)импульсов, используется в качестве параметра для отличия легочной ткани от сердечной ткани.
Радиочастотные данные дискретных отсчетов с центральной частотой передачи в 2,1 МГц изображены на Фиг. 6A и 6B. График на Фиг. 6 представляют собой опрос легочной ткани; тогда как график на Фиг.6B представляет собой опрос сердечной ткани. Легочная и сердечная ткани по виду больше отличаются при формировании изображения с инверсией импульсов, то есть при традиционном формировании изображения. Например, легочная ткань лучше реагирует на нижние частоты.
На Фиг. 6A показан график, полученный в результате линейной реакции легочной ткани на самодемодулируемые сигналы. С помощью широкополосной передачи после нелинейного распространения суммирование положительного и отрицательного импульсов будет представлять финитный сигнал вблизи 1 МГц, примерно половины от центральной частоты на передачу, явление которого называется самодемодуляцией. Легочная ткань отвечает на данный низкочастотный сигнал лучше сердечной ткани. С другой стороны, по сравнению с легочной тканью, сердечная ткань склонна благоприятствовать составляющим на более высоких частотах в режиме PI, потому что ее более сильное движение приводит результате к менее совершенному подавлению на более высоких частотах.
Часть второго алгоритма включает в себя оценку центральной частоты RF-данных. Пусть r(n) является дискретизированным трапециевидным (A-образным) сигналом, и R(n) является его комплексной огибающей. fc(n), локальная центральная частота уr(n), связана с R(n) следующим образом

где arg{*} обозначает фазу/аргумент, аfs является частотой дискретизации. Оценщики значения fc(n)могут быть выведены на основе (1). Пример оценщика представляет собой следующее:

Усреднение на основе функции-окна w(i) уменьшает разброс.
В одном примере передача осуществляется на 2,1 МГц в режиме высокого разрешения, частота дискретизации составляет 32 МГц, и плотность лучей составляет 0,72 луч/градус. Одно изображение или кадр состоит из 64 лучей с 2 передачами на луч. RF-эхо в некотором кадре обозначено в качестве {rp(n, θ),rn(n, θ)}, где нижние индексы p и n обозначают соответственно положительный и отрицательный импульс на передачу, аn и θ=θ(k) (k является индексом луча) соответственно обозначают указатель времени и угол.≡
На Фиг. 6C показана блок-схема первой версии второго алгоритма, где rs(n, θ)≡rp(n, θ)+rn(n, θ), Rf(n, θ)≡rs(n, θ) ⊗ h(n), где ⊗ обозначает свертку, аh(n) является односторонним комплексным полосовым фильтром с 121 отводом между 0,95 и 2,05 МГц. Отображение


Оценка граничного угла включает в себя определение множества пороговых величин. Начиная с первого соотношения определения пороговой величины: Чтобы некоторый луч (то есть, пусть луч θ) квалифицировать в качестве сердечной области, центральная частота должна удовлетворять следующему условию:

Таким образом, только если усредненные центральные частоты между 1500-ой и 3000-ой точками (между 36 мм и 72 мм), между 1501-ой и 3001-ой точками, …, и между 2500-ой и 4000-ой точками (между 60 мм и 96 мм) все не ниже fu1, можно полагать, что луч прошел через сердечную ткань. Совокупность индексов квалифицированных лучей обозначена в качестве набора А1. Например, A1={3,4, …, 32} (следует заметить, что 64 луча рассчитываются справа налево на Фиг. 4B и что первые два и последние два луча не квалифицируются вследствие пространственного сглаживающего фильтра) для fu1=1,37 МГц. Соответственно, граничный угол может быть оценен в качестве усредненного угла по лучам 32 и 33, при этом θ(k) является возрастающей функцией по k. Линия 432 границы затенения соответствует граничному углу.
Легочная ткань никогда не может появиться на правой стороне сердца (с перспективного вида пациента) на протяжении правильного помещения зонда, пока изображение, показанное на Фиг. 4B, фактически, не отобразится зеркально. Поэтому всегда можно оценивать границу на основе крайнего левого луча, удовлетворяющего условию, заданному в (3). Например, если A1={14,15, …, 32}, то граничный угол все еще мог бы быть оценен в качестве усредненного угла по лучам 32 и 33.
Надежность идентификации легких может быть повышена посредством включения дополнительных критериев. Вторая пороговая величина используется для обнаружения областей с очень низкой центральной частотой: При угле θ луча, если центральная частота удовлетворяет

то можно считать, что данный луч проходит сквозь легочную ткань. Совокупность индексов лучей, удовлетворяющих (4), обозначена в качестве A2. A2={3,4, …, 32} в случае, изображенном в Erreur! Source du renvoi introuvable. («Ошибка! Источник не найден.») для f1=1,27 МГц и поэтому нет никакого конфликта с соответствующим A1.
Третья (и последняя) пороговая величина используется для обнаружения областей с очень высокой центральной частотой: При угле θ(k) луча, если центральная частота удовлетворяет

то можно считать, что данный луч проходит сквозь сердечную ткань. То есть, если 5 последовательных лучей представляют очень высокую центральную частоту, то центральный луч имеет высокий шанс прохождения сердечной ткани. Совокупность индексов лучей, удовлетворяющих (5), обозначена в качестве A3.
На практике, A1, A2 и A3могутне соответствовать друг другу. Например, пересечение A1и A2 может быть непустым, означая, что некоторый луч может рассматриваться в качестве проходящего как сердечную, так и легочную ткань. Соответственно, упомянутые совокупности могут быть распределены по приоритетам. В частности A3(условие для очень высокой частоты, заданное в (5)) присваивается самый высокий приоритет, а A1(условие для высокой частоты, заданное в (3)) присваивается самый низкий приоритет. «Отрегулированный набор для сердечной ткани» задается следующим образом:
Ah≡{k|k∈A1 и k
где max(A3) является максимальным элементом из A3 и определяется в качестве -∞, если A3является пустым. Нижеследующее является эквивалентным определением:
Ah≡{k|k∈A1 и k
где
A’2≡{l|l∈A2 и l
Граница между сердцем и легким оценивается на основе самого большого элемента из Ah. Например, если A1={5,6, …, 50}, A2={3,4, 49,50,51} и A3={11,12,13}, то A’2={49,50,51}, Ah={5,6, …, 48}, и оцененный граничный угол


где Δθ=θ(k+1)-θ(k). Поскольку двумерный сглаживающий фильтр ухудшает лучи по сторонам, то выносится заключение о том, что никакой легочной ткани не появлялось в изображении, если θ[max(Ah)]≥(количества лучей) - (половина поперечной размерности двумерного сглаживающего фильтра) =64 - =62.
Роль fu1 намного важнее роли f1, но иногда существование A2 положительно способствует определению границы. В итоге, в данной первой версии второго алгоритма, fu1=1,37 МГц,f1=1,27 МГц и fu2=∞.
Вторая версия второго алгоритма также имеет отношение кодномерным зондам и к PI-данным, полученным в режиме высокого разрешения. Как упомянуто выше, легочная ткань хорошо реагирует на низкочастотные составляющие сигнала линейным образом, а движение создает менее совершенное подавление на более высоких частотах в сердечной ткани в режиме PI. Это подразумевает возможность улучшения функционирования посредством замены rs(n, θ)на составной сигнал rc(n,θ) в последовательности обработки сигналов, изображенной на Фиг. 6C. По этой причине существует вторая версия второго алгоритма. На Фиг. 7 показано то, как образуется rc (n,θ), где rd (n,θ)≡rp(n,θ)-rn (n,θ), этап S710; rd,l(n,θ)≡rd(n,θ)⊗hl (n), этап S720; этап S730 идентичен этапу S610; rs,h (n,θ)≡rs(n,θ)⊗ hh (n), этап S740; rc (n,θ)≡wdrd,l(n,θ)+wsrs,h (n,θ), этап S750; hl (n) является вещественным фильтром низких частот с 101 отводом с частотой среза в 0,8 МГц, а hu(n) является вещественным фильтром высоких частот с 101 отводом с частотой среза в 1,15 МГц. Эхо от легочной ткани благоприятствует rd,l(n,θ)(потому что оно хорошо реагирует на низкочастотную составляющую), а эхо от сердечной ткани благоприятствует rs,h(n,θ) (вследствие большего движения). wd и ws являются весовыми коэффициентами, используемыми для уравновешивания двух сил. Обработка сигналов после rc(n,θ)остается той же самой, что и обработка после rs (n,θ) на Фиг. 6C. Примерные параметры принимают следующие значения wd=1,2, ws=1, fu1=1,4 МГц, f1=1,2 МГц и fu2=1,5 МГц.
Версия второго алгоритма для матричного зонда основана на второй версии - составные сигналы используются для оценки центральной частоты. RF-данные могут быть собраны, например, с использованием режима формирования изображения при проникновении с задействованной PI и центральной частотой в 2,2 МГц. Поперечная и вертикальная ширины могут быть максимальными.
Каждый объем имеет 40 (поперечных) на 33 (вертикальных)A-образных линий на передачу (с 2 актами передачи на A-образную линию вследствие получения PI), и 80 на 66 A-образных линий на прием, дискретизируемых на частоте в 16 МГц по причине 4-х направленного формирователь луча. Четыре сигнала каждого направление передачи суммируются для получения RF-эха {rp(n,θ,ϕ), rn(n,θ,ϕ)} с 40 θ-значениями и 33 ϕ-значениями. Поперечная плотность лучей составляет 0,41 луча на градус.
На Фиг. 8 показана блок-схема версии второго алгоритма для матричного зонда, с временной частотой дискретизации в 16 МГц. Этапы заключаются в следующем: вычитание (этап S805), низкочастотная фильтрация (этап S810), суммирование (этап S815), высокочастотная фильтрация (этап S820), взвешенное суммирование (этап S825), комплексная временная фильтрация (этап S830), оценка центральной частоты (этап S835), двумерная фильтрация (этап S840), оценка границы (этап S845), медианная фильтрация (этап S850) и визуализация через плоскости (этап S855). Вкратце, ϕ=ϕ(ν),rd(n,θ,ϕ)≡rp(n,θ,ϕ) - rn(n,θ,ϕ), rs(n,θ,ϕ)≡rp(n,θ,ϕ)+rn(n,θ,ϕ), rd,l(n,θ,ϕ)≡rd(n,θ,ϕ) ⊗hl(n), rs,h(n,θ,ϕ)≡rs(n,θ,ϕ) ⊗hh(n), rc(n,θ,ϕ)≡wdrd,l(n,θ,ϕ)+wsrs,h(n,θ,ϕ), hl(n) является вещественным фильтром низких частот с 51 отводом счастотой среза в 0,8 МГц, hu(n) является вещественным фильтром высоких частот с 51 отводом с частотой среза в 1,3 МГц, wd=2, аws=1. Комплексная огибающая Rf(n,θ,ϕ)≡rc(n,θ,ϕ) ⊗h(n), где h(n) является односторонним комплексным полосовым фильтром с 61 отводом между 0,95 и 2,05 МГц. В каждой вертикальной плоскости отображение
Для оценки границыопределяется следующее:


и

где fu1=1,38 МГц. Эквивалентно f1≡0, fu2≡∞, A2,ν и A3,νявляются пустыми, и отрегулированный набор для сердечной ткани Ah,ν=A1,ν.
Граничный угол между сердцем и легким в ν-ой плоскости

Медианный фильтр с 5 отводами (функция от ν) в вертикальном направлении затем применяется к


Устройство включает в себя формирующий изображение зонд и выполнено с возможностью динамического составления представления визуальной обратной связи для руководства ручной регулировкой, посредством зонда, местоположения и ориентации, относящихся к зонду. Составление выборочно основано на сравнениях между зонами видимости зонда и соответствующими результатами сегментации данных изображения, полученных посредством зонда. В одном варианте осуществления обратная связь не включает в себя полутоновое воспроизведение данных изображения. Могут быть вычислены преобразования системы координат, соответствующие соответственным сравнениям. Выбор может быть основан на содержимом формирования изображения, динамически получаемого посредством зонда, и динамически реагировать на него.
В дополнение к выполнению диагностического обследования сердца, выполняемого медсестрами или другими практикующими врачами, которые могут быть не обучены специально сонографии, устройство 100 может руководить начинающими сонографистами. Устройство 100 может характеризоваться, с этой целью или для данного режима, обычной (полутоновой) сонограммой, наряду с визуальной обратной связью 144, описанной в данном документе выше. Альтернативно, новая визуальная обратная связь 144 устройства 100 может ускорить поток выполняемых действий обученных или опытных сонографистов.
В то время как изобретение было изображено и описано подробно на чертежах и предшествующем описании, такое изображение и описание должны рассматриваться в качестве иллюстративных или примерных, а не ограничивающих; изобретение не ограничено раскрытыми вариантами осуществления.
Например, кабель 140 зонда может быть опущен в варианте осуществления беспроводного зонда.
После изучения чертежей, раскрытия и прилагаемой формулы изобретения при осуществлении заявляемого изобретения специалистами в уровне техники могут быть поняты и произведены другие изменения к раскрытым вариантам осуществления. В формуле изобретения слово «содержит» не исключает других элементов или этапов, и упоминаемые в единственном числе признаки не исключают множественности. Любые ссылочные обозначения в формуле изобретения не должны рассматриваться в качестве ограничивающих объем.
Компьютерная программа может быть сохранена на мгновение, временно или на более длинный промежуток времени на подходящем считываемом компьютером носителе, таком как оптический носитель хранения информации или твердотельный носитель. Такой носитель постоянен только в смысле того, что не является временным, распространяющимся сигналом, однако включает в себя другие формы считываемого компьютером носителя, такие как регистровое запоминающее устройство, кэш-память процессора, RAM и другое энергозависимое запоминающее устройство.
Одиночный процессор или другой блок могут выполнять функции некоторых объектов, изложенных в формуле изобретения. Простой факт того, что некоторые средства измерения изложены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих средств измерения не может использоваться для достижения преимуществ.
Реферат
Группа изобретений относится к медицинской технике, а именно к визуальному руководству пользователю по регулировке местоположения и ориентации формирующего изображения зонда. Устройство для регулировки местоположения и ориентации формирующего изображение зонда содержит формирующий изображение зонд и процессор обеспечения руководства пользователю, выполненный с возможностью динамического составления представления визуальной обратной связи для обеспечения руководства по ручной регулировке формирующего изображение зонда, причем устройство выполнено с возможностью обнаружения приостановки в ручной регулировке, а составление выборочно основано на ориентации анатомического сегмента в текущей зоне видимости формирующего изображение зонда, причем эта ориентация определяется в реальном времени после обнаружения приостановки в ручной регулировке; определяемой другой зоне видимости формирующего изображение зонда, основанной на ориентации анатомического сегмента и текущей зоне видимости; и сравнениях между зонами видимости зонда и соответствующими результатами сегментации данных изображения, полученных посредством зонда. Считываемый компьютером носитель воплощает компьютерную программу для выдачи пользователю, который манипулирует формирующим изображение зондом, руководства по регулировке местоположения и ориентации формирующего изображение зонда, при этом упомянутая программа включает в себя команды, исполняемые процессором. Устройство выдачи пользователю, который манипулирует формирующим изображение зондом, руководства по регулировке местоположения и ориентации формирующего изображение зонда, содержащее по меньшей мере одну интегральную схему и выполненное с возможностью, посредством одной или более из упомянутой по меньшей мере одной интегральной схемы обнаружения приостановки в ручной регулировке формирующего изображение зонда; динамического составления представления визуальной обратной связи для обеспечения руководства по ручной регулировке упомянутого формирующего изображение зонда. Использование изобретений позволяет расширить арсенал средств для использования ультразвуковых данных для диагностических и последующих обследований сердца. 3 н. и 13 з.п. ф-лы, 8 ил.
Комментарии