Зонд системы ультразвуковой визуализации, и система, и способ визуализации - RU2734129C2
Код документа: RU2734129C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ
Это изобретение относится к зонду системы ультразвуковой визуализации, и ко всей системе в целом, и к способу визуализации. В частности, оно относится к схемам аналого-цифрового преобразователя, используемым в таких приложениях визуализации.
УРОВЕНЬ ТЕХНИКИ
Гармоническая ультразвуковая визуализация - это одна из специфических методик ультразвуковой визуализации, которая вызывает возрастающий интерес. Она использует нелинейное распространение ультразвука через ткани тела. Участок высокого давления волны распространяется быстрее, чем участки низкого давления, приводя к искажению формы волны. Это изменение формы волны приводит к генерации гармоник (кратные частоты фундаментальной, или передаваемой, частоты) от ткани. Например, известно использование второй гармоники для получения изображения, поскольку последующие гармоники имеют уменьшающуюся амплитуду и, следовательно, их недостаточно для получения надлежащего изображения.
Интенсивность гармонических волн, которые создаются в пределах ткани, увеличивается с глубиной до максимальной, и затем уменьшается с дальнейшим ростом глубины вследствие затухания. Следовательно, максимальная интенсивность достигается при оптимальной глубине ниже поверхности.
Гармоническая визуализация основана на передаче относительно низкочастотных ультразвуковых волн, которые имеют большое проникание; и на приеме одной или более гармоник передаваемого сигнала, которые появляются в отражениях из-за различных рассеивающих объектов. Таким образом, более глубокое проникание может быть скомбинировано с большей специальной разрешающей способностью, чем это достижимо для более высоких частот.
Гармоническая визуализация имеет очень широкие и растущие применения. Она используется в классической ультразвуковой визуализации для получения лучшего специфического разрешения при низкой частоте ультразвука (например, от 2,5 до 6 МГц). Она становится еще более интересным способом визуализации, когда используются более высокие частоты, поскольку существующие способы пропорционально становятся более сложными и дорогостоящими. В частности, малая глубина проникания высокочастотного ультразвука требует методик визуализации, которые могут обойти эту проблему.
В дополнение к классическим применениям визуализации, гармоническая визуализация может играть важную роль в таких применениях, как определение характеристик ткани, где она может позволить точное различение различных тканей, предоставляя точные измерения амплитуды на определенной частоте или при комбинации частот. Очень хорошее разрешение по амплитуде и частоте может способствовать получению информации о тканях, границах и аномалиях.
Проблема с ультразвуковыми системами визуализации заключается в отношении сигнала к шуму для принимаемой информации. Оно улучшается предоставлением аналого-цифрового преобразования на ранней стадии (для цифрового сигнала обеспечение связи и обработка сигнала более устойчивы к шуму и помехам), но это приводит к большей потребляемой мощности схемой приемника.
Статья "1,8V CMOS Gm-C полосовой сигма-дельта модулятор четвертого порядка, предназначенный для входного ультразвукового приемника" в журнале Analog Integrated Circuits and Signal Processing, vol.48, no.2, 9 May 2006 pages 121-132 (XP 019390181) раскрывают ультразвуковой приемник, который использует полосовой сигма-дельта преобразователь, так, чтобы приемник мог быть настроен на различные частоты.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение задается в соответствии с формулой изобретения.
В соответствии с примерами и в соответствии с объектом изобретения, предоставляется зонд системы ультразвуковой визуализации, содержащий:
головку преобразователя визуализации, выполненную с возможностью передачи ультразвукового сигнала на частоте передаваемого ультразвука; и
схему приема для обработки принятых отраженных ультразвуковых сигналов,
причем схема приема содержит аналого-цифровой сигма-дельта преобразователь, который содержит замкнутый контур, который содержит настраиваемый полосовой фильтр с настраиваемой центральной частотой и шириной полосы пропускания, и
причем центр полосы пропускания настраиваемого полосового фильтра является перестраиваемым между первой частотой, которая соответствует частоте передаваемого ультразвука, и второй частотой, которая соответствует требуемой гармонике частоты передаваемого ультразвука.
Таким образом, изобретение использует полосовые сигма-дельта аналого-цифровые преобразователи (ADC). Могут присутствовать один или более сигма-дельта аналого-цифровых преобразователей. Они представляют собой устройства из новейшей технологии, которая, прежде всего, обязана таким применениям, как программно-задаваемые радиосистемы, где этот тип преобразователей может обеспечить необходимую гибкость и программируемость архитектуры. Предоставляется программируемая центральная частота, и полоса пропускания выбирается электронным устройством накопления ультразвуковых данных. Кроме того, полоса пропускания и центральная частота могут быть точно перестроены, например, между частотой передаваемого сигнала или требуемой гармоникой передаваемого сигнала, так, что ADC может быть эффективно использован для обработки только требуемой полосы частот. Это может быть сделано введением схемы настройки полосы пропускания, которая использует в качестве опорной частоты известную передаваемую частоту или ее гармоники. Зонд может иметь очень высокую частотную селективность и очень высокую разрешающую способность по амплитуде, основанную на программируемом полосовом фильтре, включенном в замкнутый контур ADC (обратная связь). Аналого-цифровой преобразователь может также иметь программируемую тактовую частоту и масштабирование цифро-аналогового преобразования (DAC).
Полосовое преобразование призвано оптимизировать потребление энергии, преобразовывая только требуемую полосу частот.
Центр полосы пропускания настраиваемого полосового фильтра может, таким образом, соответствовать частоте передаваемого ультразвука или требуемой гармонике передаваемой частоты ультразвука. Полосовое преобразование воздействует на достижимое отношение сигнала к шуму, поскольку шум вне полосы пропускания уже не влияет на работу. Это позволяет системе масштабировать полосу пропускания с более высоким разрешением без связывания характеристик шума в цепь для составляющих блоков ADC.
Головка преобразователя может содержать матрицу элементов преобразователя, и причем схема обработки сигналов содержит аналого-цифровой сигма-дельта преобразователь для каждого элемента преобразователя головки преобразователя или для группы элементов преобразователя. Таким образом, имеется преобразование в цифровую форму на уровне отдельных элементов преобразователя.
Схема приема может тогда содержать усилитель между каждым элементом преобразователя и соответствующим аналого-цифровым сигма-дельта преобразователем.
Полосовой фильтр может быть перестраиваемым между режимом широкой полосы пропускания с низким разрешением и режимом узкой полосы пропускания с высоким разрешением. Эти два режима тогда соответствуют различным режимам визуализации для системы ультразвуковой визуализации, в которой используется зонд.
Полосовой фильтр также может быть настраиваемым на режим средней полосы пропускания со средним разрешением. Тогда имеется, по меньшей мере, три различных режима визуализации.
Изобретение также предоставляет ультразвуковую систему, содержащую:
зонд системы ультразвуковой визуализации, заданный выше;
контроллер для управления зондом;
формирователь пучка; и
схему обработки сигналов для обработки сигналов от схемы приема для генерации ультразвукового изображения.
Ультразвуковая система может обрабатывать принятые отраженные ультразвуковые сигналы, которые являются гармониками передаваемых ультразвуковых сигналов.
Контроллер может быть выполнен с возможностью управления настраиваемого полосового фильтра синхронно с переключением между различными рабочими режимами приема ультразвуковой системы. Эти рабочие режимы приема могут задавать различное разрешение в связи с опциями полосы пропускания. Таким образом, настройка полосового фильтра зависит от используемой передаваемой частоты, так же как и от используемого режима приема.
Примеры в соответствии с другим объектом изобретения предоставляют способ ультразвуковой визуализации, содержащий:
предоставление ультразвука в визуализируемый объем с использованием головки преобразователя визуализации; и
обработку принятых отраженных ультразвуковых сигналов посредством настройки полосового фильтра в пределах замкнутого контура аналого-цифрового сигма-дельта преобразователя, причем полосовой фильтр имеет настраиваемую центральную частоту и ширину полосы пропускания,
причем способ содержит установку центра полосы пропускания настраиваемого полосового фильтра на передаваемую частоту ультразвука или требуемую гармонику частоты передаваемого ультразвука.
Кроме того, полоса пропускания может быть установлена на другую центральную частоту или ширину полосы пропускания. Это может потребоваться, когда используемое формирование пучка передачи или тип сигнала (например, радиоимпульс с частотной модуляцией) приводит к появлению компонентов сигнала в отличающейся полосе частот.
Головка преобразователя может содержать матрицу элементов преобразователя, и при этом способ содержит выполнение аналого-цифрового преобразования отдельно для каждого элемента преобразователя головки преобразователя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения описываются ниже подробно в связи с сопроводительными чертежами, на которых:
Фиг.1 изображает известную систему ультразвуковой визуализации, которая может быть модифицирована для использования конструкции ультразвукового зонда согласно изобретению;
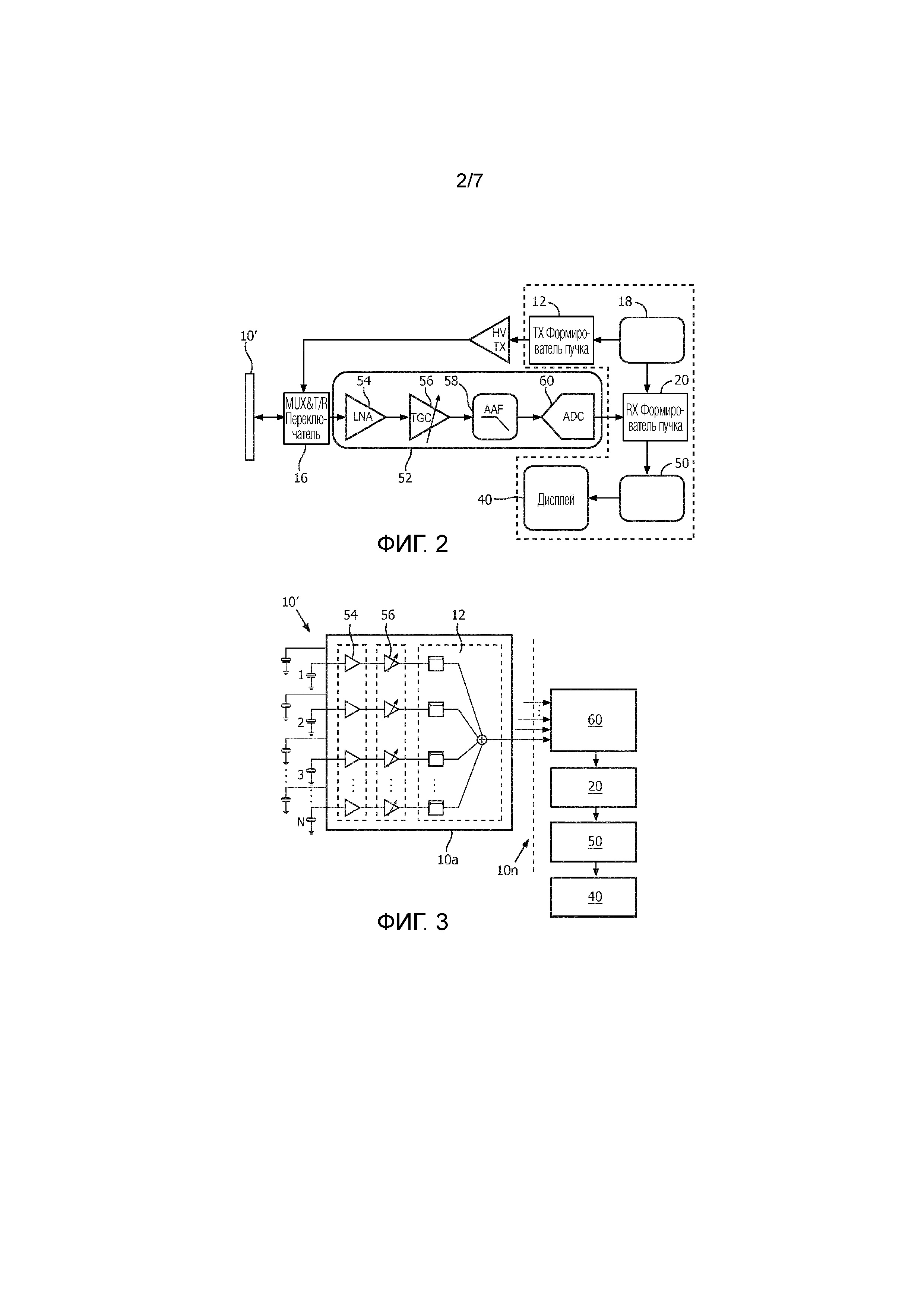
Фиг.2 - более подробная иллюстрация первого известного подхода к аналого-цифровому преобразованию сигналов зонда;
Фиг.3 - более подробная иллюстрация второго примера известного подхода к аналого-цифровому преобразованию сигналов зонда;
Фиг.4 - более подробная иллюстрация третьего примера подхода к аналого-цифровому преобразованию сигналов зонда;
Фиг.5 - иллюстрация того, что различные варианты ультразвукового зонда и, в частности, преобразователи с преобразованием давление - электрический сигнал, имеют различные частотные характеристики;
Фиг.6 - иллюстрация того, как могут использоваться различные рабочие режимы;
Фиг.7 - известный аналого-цифровой сигма-дельта преобразователь;
Фиг.8 - частотные характеристики выходного сигнала преобразователя на Фиг.7;
Фиг.9 - настраиваемый аналого-цифровой сигма-дельта преобразователь для использования в ультразвуковом зонде согласно изобретению;
Фиг.10 - частотные характеристики преобразователя на Фиг.9 в трех различных рабочих режимах;
Фиг.11 - схема управления для управления настройкой настраиваемого аналого-цифрового сигма-дельта преобразователя из Фиг.9;
Фиг.12 - настраиваемый аналого-цифровой сигма-дельта преобразователь из Фиг.9 с первым примером настраиваемого полосового фильтра; и
Фиг.13 - настраиваемый аналого-цифровой сигма-дельта преобразователь из Фиг.9 со вторым примером настраиваемого полосового фильтра.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
Изобретение предоставляет зонд системы ультразвуковой визуализации, который содержит визуализирующую головку преобразователя и схему приема для обработки принятых отраженных ультразвуковых сигналов. Схема приема содержит аналого-цифровой сигма-дельта преобразователь, который содержит замкнутый контур, содержащий настраиваемый полосовой фильтр. Это позволяет аналого-цифровому преобразователю обрабатывать только требуемую полосу частот. Ширина полосы пропускания преобразования ADC и эффективное число битов (ENOB) являются, таким образом, программируемыми, обеспечивая более эффективную конструкцию зонда, и также позволяя осуществлять аналого-цифровое преобразование уже в цепи обработки сигналов.
Общая работа ультразвуковой диагностической системы визуализации вначале описывается в связи с Фиг.1.
Следует отметить, что ниже описывается именно функция приема системы, поскольку это изобретение относится к аналого-цифровому преобразованию в приемном канале.
Система содержит ультразвуковой зонд 10, который имеет матрицу 10' преобразователей CMUT (емкостной преобразователь, полученный микрообработкой) для передачи ультразвуковых волн и для приема информации от эхо-сигналов. Матрица 10' преобразователей может альтернативно содержать элементы пьезоэлектрического преобразователя, сформированного из таких материалов, как PZT (цирконат-титанат свинца) или PVDF (поливинилиденфторид). Матрица 10' преобразователей представляет собой одно- или двумерную матрицу элементов преобразователя, пригодных для сканирования в 2D (двумерной) плоскости или в трех измерениях для 3D (трехмерной) визуализации.
Матрица 10' преобразователей присоединена к (опциональному) микро-формирователю 12 пучка в зонде, который управляет приемом сигналов ячейками матрицы CMUT или пьезоэлектрическими элементами. Микро-формирователи пучка пригодны, по меньшей мере, для частичного формирования пучка сигналов, принятых группами или "блоками" элементов преобразователя как описано в Патентах США 5,997,479 (Savord и др.), 6,013,032 (Savord), и 6,623,432 (Powers и др.).
Микро-формирователь 12 пучка соединен кабелем зонда с переключателем 16 передача/прием (T/R), который переключается между передачей и приемом и защищает главный формирователь 20 пучка от воздействия высоковольтных передаваемых сигналов, когда микро-формирователь пучка не используется и матрица преобразователей управляется непосредственно главным формирователем пучка системы. Передача ультразвуковых пучков от матрицы 10 преобразователей направляется контроллером 18 преобразователей, связанным с микро-формирователем пучка переключателем 16 T/R и главным формирователем пучка передачи (не показан), который принимает входной сигнал в результате действия пользователя с пользовательским интерфейсом или от панели 38 управления.
Одна из функций, управляемых контроллером 18 преобразователей заключается в направлении пучков и их фокусировке. Пучки могут быть направлены прямо вперед от (ортогонально к) матрицы преобразователей, или под различных углами для более широкого поля обзора. Контроллер 18 преобразователей может быть связан с управлением регулировкой 45 смещения постоянного тока для матрицы CMUT. Регулировка 45 смещения постоянного тока устанавливает напряжение(-я) смещения постоянного тока, которое прикладывается к ячейкам CMUT.
В канале приема, частично сформированные в пучок сигналы производятся микро-формирователем 12 пучка и связаны с главным приемным формирователем 20 пучка, где частично сформированные в пучок сигналы от отдельных блоков элементов преобразователя объединяются в полностью сформированный в пучок сигнал. Например, главный формирователь 20 пучка может иметь 128 каналов, каждый из которых принимает частично сформированный в пучок сигнал от блока из десятков или сотен ячеек преобразователя CMUT или пьезоэлектрических элементов. Таким образом, сигналы, принятые тысячами элементов преобразователей матрицы преобразователей могут эффективно внести вклад в единственный сформированный в пучок сигнал.
Сформированные в пучок приемные сигналы связаны с сигнальным процессором 22. Сигнальный процессор 22 может обрабатывать принятые эхо-сигналы различным образом, например, полосовой фильтрацией, прореживанием, разделением I и Q компонент, и разделением гармонических сигналов, которое действует для разделения линейных и нелинейных сигналов, так, чтобы позволить идентификацию нелинейных (высшие гармоники фундаментальной частоты) эхо-сигналов, возвращаемых из ткани и от микропузырьков. Сигнальный процессор также может выполнять дополнительное повышение уровня сигнала, например, понижение уровня спеклов, формирование сигнала, и устранение шума. Полосовой фильтр в сигнальном процессоре может быть следящим полосовым фильтром, с его полосой пропускания, переходящей от полосы высших частот до полосы низших частот, поскольку эхо-сигналы принимаются от увеличивающихся глубин, тем самым, переводя шум к более высоким частотам от больших глубин, где эти частоты лишены анатомической информации.
Формирователи пучков для передачи и для приема осуществляются в различных аппаратных средствах и могут иметь различные функции. Конечно, формирователь пучка приемника спроектирован с учетом передаточных характеристик формирователя пучка. На Фиг.1 показаны только формирователи пучков 12, 20 приемника, поскольку это изобретение относится к каналу обработки принимаемых сигналов. В полной системе, будет также цепь передачи с микро-формирователем пучка передачи, и главным формирователем пучка передачи.
Функция микро-формирователя 12 пучка заключается в предоставлении начальной комбинации сигналов для уменьшения числа аналоговых кабелей. Обычно это выполняется в аналоговой области.
Окончательное формирование пучка делается в главном формирователе 20 пучка и выполняется обычно после преобразования в цифровую форму.
Каналы передачи и приема используют ту же самую матрицу 10' преобразователей, которая имеет фиксированную полосу частот. Однако, ширина полосы частот, которую занимают импульсы передачи, может варьироваться в зависимости от использованного формирования пучка передачи. Канал приема может охватывать всю полосу пропускания преобразователя (что является классическим подходом) или, при использовании обработки посредством полосы пропускания, он может извлекать только ту ширину полосы частот, которая содержит полезную информацию (например, гармоники главной гармоники).
Обрабатываемые сигналы подаются на процессор 26 режима B (то есть, режим яркости, или режим 2D визуализации) и Доплеровский процессор 28. Процессор 26 режима B использует детектирование амплитуды принятого ультразвукового сигнала для визуализации структур в теле, например, ткани органов и сосудов в теле. Изображения B режима для структуры тела могут быть сформированы или в режиме гармонического изображения или в режиме фундаментального изображения или при комбинации обоих режимов, как описано в Патенте США 6,283,919 (Roundhill и др.) и Патенте США 6,458,083 (Jago и др.). Доплеровский процессор 28 обрабатывает различающиеся по времени сигналы от движения ткани и кровотока для детектирования движения веществ, например, потока клеток крови в поле изображения. Доплеровский процессор 28 обычно включает в себя фильтр стенок сосудов с параметрами, которые могут быть выполнены с возможностью передачи и/или отклонения эхо-сигналов, возвращенных от выбранных типов материалов в теле.
Например, фильтр стенок сосудов может быть установлен как имеющий такую характеристику полосы пропускания, которая пропускает сигналы относительно малой амплитуды от материалов с наибольшей скоростью, отклоняя относительно интенсивные сигналы от материалов с наименьшей или нулевой скоростью. Эта характеристика полосы пропускания пропускает сигналы от протекающей крови, отклоняя сигналы от почти стационарных или медленно двигающихся объектов, например, от стенки сердца. Обратная характеристика пропускала бы сигналы от двигающейся ткани сердца, отклоняя сигналы кровотока, что соответствует Доплеровской визуализации ткани, регистрирующей и отображающей движение ткани. Доплеровский процессор принимает и обрабатывает последовательность временных дискретных эхо-сигналов от различных точек в поле изображения, последовательность эхо-сигналов от конкретной точки обозначается как ансамбль (совокупность). Ансамбль эхо-сигналов, принятый в быстрой последовательности по относительно короткому интервалу времени может быть использован для оценки Доплеровского сдвига частоты текущей крови, с соответствием Доплеровской частоты скорости, указывающей на скорость кровотока. Ансамбль эхо-сигналов, принятый по более длинному промежутку времени, используется для оценки скорости более медленной текущей крови или медленно двигающейся ткани.
Сигналы структуры и сигналы движения, произведенные режимом B и Доплеровскими процессорами, подаются на преобразователь 32 сканирования и многоплоскостной реформатор 44. Преобразователь 32 сканирования помещает эхо-сигналы в пространственном соотношении, из которого они были приняты, в требуемом формате изображения., например, преобразователь сканирования может поместить эхо-сигнал в двумерный (2D) секторный формат, или пирамидальное трехмерное (3D) изображение. Преобразователь сканирования может наложить структурное изображение режима B с цветами, соответствующими движению в точках в поле изображения с их Доплеровскими оцененными скоростями для производства цветного Доплеровского изображения, которое демонстрирует движение ткани и кровоток в поле изображения. Многоплоскостной реформатор преобразует эхо-сигналы, которые приняты из точек в общей плоскости в объемной области тела в ультразвуковое изображение этой плоскости, как описано в Патенте США 6,443,896 (Detmer). Объемный визуализатор 42 преобразует эхо-сигналы набора 3D данных в проекционное 3D изображение, рассматриваемое от данной опорной точки, как описано в Патенте США 6,530,885 (Entrekin и др.).
Двумерные 2D или трехмерные 3D изображения подаются от преобразователя 32 сканирования, многоплоскостного реформатора 44 и объемного визуализатора 42 на процессор 30 изображения для дополнительного увеличения, буферизации и временного сохранения для демонстрации на отображающем дисплее 40. В дополнение к использованию для визуализации, значения кровотока, произведенные Доплеровским процессором 28, и информация о структуре ткани, произведенная процессором 26 режима B, подаются на процессор 34 квантификации. Процессор квантификации производит измерения различных условий потока, например, объемный расход кровотока, а также структурные измерения, например, размеры органов и гестационный возраст. Процессор квантификации может принять входной сигнал от пользовательской панели 38 управления, например, точку в анатомии изображения, где должно быть сделано измерение. Выходные данные от процессора квантификации подаются на графический процессор 36 для воспроизводства графических символов измерения и значений изображения на дисплее 40, и для звукового выхода от дисплейного устройства 40. Графический процессор 36 также может создавать графические наложения для отображения с ультразвуковыми изображениями. Эти графические наложения могут содержать стандартную информацию идентификации, например, имя пациента, дату и время изображения, параметры визуализации, и т.п. С этими целями графический процессор принимает входной сигнал от пользовательского интерфейса 38, например, имя пациента. Пользовательский интерфейс также связан с контроллером 18 передачи для управления генерацией ультразвуковых сигналов от матрицы 10' преобразователей и, следовательно, изображений, произведенных матрицей преобразователей и ультразвуковой системой. Функция контроллера 18 управления передачей - это только одна из выполняемых функций. Контроллер 18 также учитывает режим работы (задаваемый пользователем) и соответствующую требуемую конфигурацию передатчика и конфигурацию полосовой фильтрации в аналого-цифровом преобразователе приемника. Контроллер 18 может быть машиной состояний с фиксированными состояниями.
Пользовательский интерфейс также связан с многоплоскостным реформатором 44 для выбора, и управления плоскостями множественных многоплоскостных переформатированных (MPR) изображений, которые могут быть использованы для выполнения количественных измерений в поле изображения для MPR изображений.
Это изобретение относится к обработке сигналов для принятых отраженных сигналов и, в частности, оно относится к аналого-цифровому преобразованию. Аналого-цифровое полосовое преобразование уже на канала обработки сигналов позволяет получить более эффективную конструкцию зонда.
На Фиг.1 показан микро-формирователь 12 пучка и формирователь 20 пучка до канала обработки сигналов и, таким образом, они работают в аналоговой области.
Известны подходы для выполнения обработки сигналов различным образом и, в частности, аналого-цифровое преобразование может быть выполнено прежде, чем будет осуществлено любое формирование пучка. Имеются две различные системы ультразвуковой визуализации с ранним преобразованием в цифровую форму, как показано на Фиг.2 и Фиг.3.
На Фиг.2 показана обработка сигналов после формирования пучка принятого сигнала как единственный блок 50. Однако, он отображает комбинацию различных блоков, показанных на Фиг.1 в пределах соответствующей области 50.
На Фиг.2, принятые сигналы обрабатываются с использованием аналогового внешнего интерфейса 52, содержащего усилитель 54 с низким уровнем шума (LNA), программируемый усилитель 56 с компенсацией усиления по глубине (TGC), и заграждающий фильтр (AAF) 58, за которым следует аналого-цифровой преобразователь 60. Показан переключатель 16 (T/R) прием-передача, который включает в себя аналоговое мультиплексирование, так, чтобы аналоговые мультиплексоры выбирали группы уменьшенного числа элементов преобразователя, соединяемые с формирователем пучка. Выбранная группа элементов затем электронным образом обновляется для каждой акустической линии. Этот подход используется, например, в 2D ультразвуке. Он оцифровывает сигнал перед выполнением цифрового формирования пучка в формирователе 20 пучка. Функция аналого-цифрового преобразования не выполняется в зонде непосредственно. Вместо этого, используются длинные и дорогостоящие кабели для подключения сигналов к внутреннему интерфейсу. Элемент 54 находится в зонде и имеется длинный кабель между элементами 54 и 56.
На Фиг.3, на котором показана архитектура, обычно используемая для трехмерной визуализации, имеется аналоговое микро-формирование пучка на отдельных пикселях группы, с последующим цифровым формированием пучка для группы. Как показано, элементы преобразователя матрицы 10' преобразователей разделены на суб-матрицы 10a … 10n. В пределах каждой суб-матрицы, каждый преобразователь имеет усилитель 54 с низким уровнем шума (LNA), и программируемый усилитель 56 с компенсацией усиления по глубине (TGC), с последующим микро-формирователем 12 пучка, который работает в аналоговой области. Затем происходит суммирование сигналов для суб-матрицы, с последующим аналого-цифровым преобразованием, с использованием аналого-цифрового преобразователя 60, с последующим формированием пучка с использованием блока 20 формирования пучка.
Ультразвуковые системы также различаются тем, где располагаются различные функциональные блоки. На Фиг.2, например, только часть аналогового внешнего интерфейса 52 типично осуществляется в ультразвуковом зонде. И напротив, усиление, фильтрация, формирование пучка и управления пучком реализуется в системе внутреннего интерфейса, которая расположена в сканере.
Кроме того, каждая система имеет множество каналов, каждый из которых имеет передатчик и переключатель (включающий в себя диодный мост), который позволяет прохождение передающих импульсов высокого напряжения к элементам преобразователя, но блокирует эти импульсы от попадания в чувствительные приемники. Эхо-сигналы возвращаются к каждому приемнику, которые состоят из последовательных усилителей, включая и такой, который имеет переменное усиление для TGC при пользовательском управлении. Выходной сигнал каждого канала проходит на приемный формирователь 20 пучка.
Импульсные эхо-сигналы от тела принимаются элементами матрицы и проходят через отдельные регулируемые пользователем усилители с TGC для компенсации ослабления эхо-сигнала вследствие затухания в теле и вследствие дифракции с расстоянием. Эти сигналы затем проходят на приемный формирователь 20 пучка.
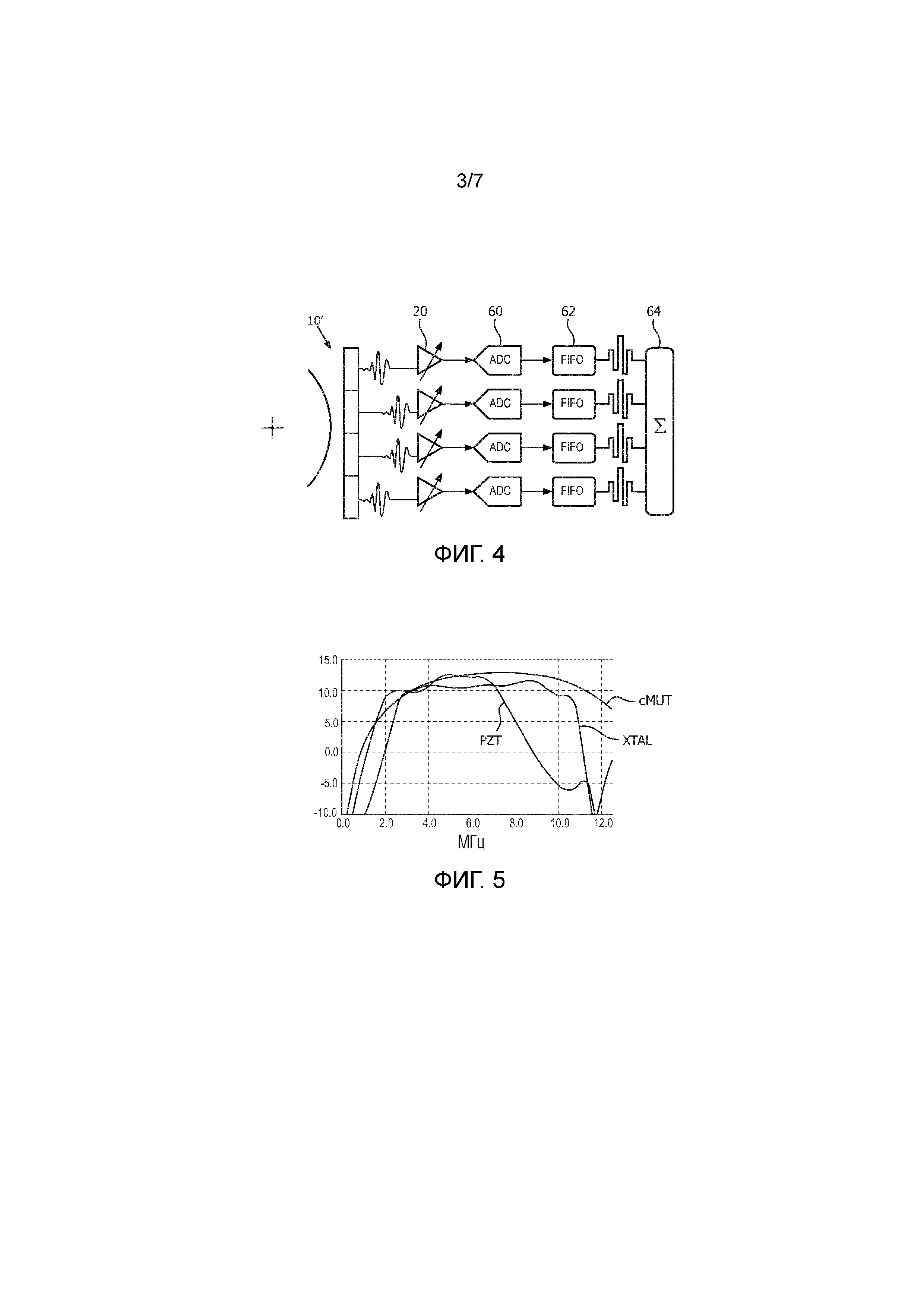
На Фиг.4 схематично показан цифровой, в большой степени параллельный, внешний интерфейс. Каждый элемент преобразователя связан с соответственным усилителем 20, который содержит функцию (TGC) компенсации усиления по глубине. Этот подход обеспечивает раннее преобразование в цифровую форму принятого сигнала. Аналого-цифровое преобразование может быть затем осуществлено в зонде, так, чтобы соединительные кабели были после преобразования в цифровой области.
Выходной сигнал от усилителя 20 оцифровывается в аналого-цифровом преобразователя 60 перед буферизацией в порядке очереди (FIFO) в регистрах 62, которые осуществляют переменные задержки перед суммированием в сумматоре 64.
Имеется много преимуществ использования раннего преобразования в цифровую форму для многих типов конфигураций преобразователей, включая преобразователи для трехмерной визуализации.
Однако, при раннем преобразовании в цифровую форму возникают требования к размеру и потребляемой мощности электроники внешнего интерфейса и к функционированию ADC, в частности. Требования к функционированию ADC в смысле разрешения, например, эффективного числа битов, ENOB, и ширины полосы пропускания (BW), преобразования, могут значительно варьироваться от одного режима работы к другому. Параметры ENOB и BW представляют собой два самых важных параметра, которые определяются в соответствии с требованиями конкретного применения (режимом визуализации или задачей извлечения главной особенности из визуализации). Эти параметры также определяют требования ко всей системе визуализации и к подробным спецификациям отдельных составляющих блоков.
В системе ультразвуковой визуализации, пригодная для использования полоса частот сигнала определяется частотной характеристикой преобразования ультразвука. Как показано на Фиг.5, различные преобразователи работают в различных частотных диапазонах (их акустические характеристики изменяются с передаваемой частотой). На Фиг.5 показан сигнал в зависимости от частоты для PZT, CMUT и для кристаллического (XTAL) преобразователей.
Низкая частота позволяет большее проникание, и более высокая частота позволяет получить улучшенный отклик от ткани, более тонкие детали и визуализацию с третьей гармоникой. Визуализация с гармониками более высокого порядка может быть получена при использовании широкополосных преобразователей или при использовании узкополосного преобразователя для визуализации на частоте гармоники.
Преобразователи CMUT имеют самую широкую рабочую полосу частот. Вместе с тем, полная ширина полосы частот пропускания никогда не используется постоянно. Фактически, наиболее используемые режимы визуализации используют только части всей полосы частот, как показано на Фиг.6. На Фиг.6 показаны различные частотные характеристики преобразователя CMUT для различных режимов визуализации. Темный график 20 показывает реальный спектральный Доплеровский режим измерения. Больше деталей относительно частотной характеристики преобразователя CMUT для различных режимов визуализации может быть найдено в Патенте WO 2015/028945 A3.
Затухание ультразвуковых волн в среде является существенным фактором, влияющим на конфигурацию электроники внешнего интерфейса. Ультразвуковые волны затухают логарифмически, а не линейно.
Это изобретение основано на понимании того, что адаптируемый подход полосовой обработки сигналов может быть использован для адаптации полосы пропускания и разрешения каждого измерения в соответствии с требованиями каждого режима визуализации.
Обычные аналого-цифровые преобразователи имеют низкочастотное пропускание, означая то, что они могут преобразовать сигналы, расположенные между постоянным током и частотой FN, где FN - частота Найквиста системы.
На Фиг.7 показана структура сигма-дельта ADC, подходящего для обработки ультразвукового изображения.
Аналоговый входной сигнал i(t) фильтруется фильтром 70 нижних частот прежде, чем синхронизируется 1 битовым аналого-цифровым преобразователем 72 для создания цифрового выходного сигнала o [Ts]. Канал обратной связи включает в себя 1 битовый цифро-аналоговый преобразователь 74, и аналоговый сигнал обратной связи fb(t) объединяется с входным сигналом для получения разностного сигнала d(t), который подается на фильтр 70 низких частот.
Следует отметить, что в петле обратной связи вместо этого могут быть использованы многобитовый ADC и DAC.
На Фиг.8 показана требуемая полоса 80 частот сигнала, частота 82 Найквиста и избыточно дискретизированная полоса 84 частот.
Этот преобразователь, в своем классическом режиме прохождения низких частот, преобразовывает достаточно большую полосу частот сигнала, которая может превысить в несколько раз полосу частот требуемого входного сигнала. Кроме того, достижимая точность в значительной степени зависит от того, насколько велика ширина полосы частот преобразования. Очевидно, в случаях, когда требуемый сигнал находится в узкой полосе высоких частот, оба преобразователя становятся очень неэффективными в отношении потребляемой мощности и своих рабочих параметров, и в результате этого производят много данных, которые не являются полезными для соответственного конструирования изображения.
На Фиг.9 показан аналого-цифровой преобразователь 110, который модифицирован в соответствии с изобретением. Аналоговый входной сигнал i(t) фильтруется в фильтре 112 прежде, чем квантуется по амплитуде и по времени 1 битовым аналого-цифровым преобразователем 72 (как также и на Фиг.7) для создания цифрового выходного сигнала о[Ts]. Канал обратной связи включает в себя 1 битовый цифро-аналоговый преобразователь 74, и аналоговый сигнал fb(t) обратной связи объединяется с входным сигналом для получения разностного сигнала d(t), который подается на фильтр 112.
Как объяснено выше, в общем случае, аналого-цифровой преобразователь и цифро-аналоговый преобразователь в замкнутом контуре обратной связи могут быть многобитовыми.
Аналого-цифровой преобразователь может иметь программируемую тактовую частоту и масштабируемость цифро-аналогового преобразователя.
Тактовая частота может быть отрегулирована для достижения следующих преимуществ:
(i) она может быть увеличена для увеличения разрешения в полосе преобразования, эффективно увеличивая показатель избыточной дискретизации для этой полосы частот
(ii) она может быть уменьшена для сохранения мощности (тем самым, жертвуя некоторым разрешением, если оно не необходимо)
(iii) она может использоваться также для настройки системы. Работа системы является результатом взаимодействия контурного фильтра с тактовой частотой. Когда затруднительно осуществить точное требуемое значение для коэффициента контурного фильтра, полная требуемая рабочая характеристика может быть все же достигнута адаптацией тактовой частоты.
Фиксированная тактовая частота может быть предпочтительна для упрощенного воплощения всей системы.
Цифро-аналоговый преобразователь может повторно масштабироваться, если тактовая частота изменяется, для гарантии того, что будет тот же самый выходной сигнал цифро-аналогового преобразователя с новым тактовым сигналом. Кроме того, цифро-аналоговый преобразователь может масштабироваться для приспособления различных максимальных входных сигналов.
Фильтр 112 является настраиваемым полосовым фильтром. Для реализации оптимального положения полосы пропускания, программируемость фильтра может управляться сигналами синхронизации, полученными из переданных сигналов, используемых для конкретного режима визуализации. Это позволяет получить дополнительную оптимизацию полной цепи обработки сигналов и упрощает конструкцию преобразователя.
Наиболее классические режимы, например, режим яркости (B-режим или 2D режим) и Доплеровский режим могут использовать предложенный принцип, что дает преимущество в преобразовании только требуемых полос частот.
Кроме того, могут быть использованы режимы гармонической визуализации, в которых передача и прием используют ту же самую матрицу преобразователей (например, для данной частоты)., например, передатчик передает сигнал в нижней 1/3 полосы частот преобразователя, тогда как приемник работает в верхней 1/3 полосы частот для фиксации 3-ей гармоники передаваемого сигнала.
Кроме того, передача использует целую полосу частот одного низкочастотного преобразователя, тогда как приемник использует другой высокочастотный преобразователь с приемной полосой частот, расположенной на частотах, в 3 раза более высоких.
На Фиг.10 показана полоса пропускания фильтра 112 и полоса преобразования всего аналого-цифрового преобразователя. Область 120 показывает режим узкой полосы с очень высоким разрешением, например, больше чем 100 дБ с шириной полосы частот 200 кГц. Это позволяет иметь очень точные измерения амплитуды в узкой полосе частот для характеристики ткани.
Область 122 показывает режим средней полосы частот и среднего разрешения, например, больше чем 80 дБ с шириной полосы частот 1МГц. Область 124 показывает режим широкой полосы частот с низким разрешением, например, больше чем 50 дБ с шириной полосы частот 3 МГц.
Таким образом, полосовой фильтр может быть перестраиваемым между режимом с низким разрешением и широкой полосой пропускания и режимом с высоким разрешением и узкой полосой пропускания. Режим с широкой полосой пропускания, например, имеет полосу пропускания больше чем 1 МГц, например, больше чем 1,5 МГц и возможно больше 3 МГц, тогда как режим малой/узкой полосы пропускания имеет полосу пропускания меньше чем 1 МГц, например, меньше чем 750 кГц, например, меньше чем 500 кГц и возможно меньше чем 250 кГц. Ось Y на Фиг.10 показывает достижимый динамический диапазон (DR) всего аналого-цифрового преобразователя. Обычно, динамический диапазон используется для получения разрешения в отношении Эффективного Числа Битов (ENOB). ENOB=(SNR - 1,76)/6,04, где в идеальном случае SNR (отношение сигнал-шум)=DR.
Центральная частота полосы пропускания настраивается на передаваемую частоту или на гармонику передаваемой частоты. Имеется много опций для передаваемой частоты. Обычно, диагностическая визуализация использует от 2 МГц до 5 МГц, однако для визуализации внутри тела с катетерами, могут использоваться частоты 30 МГц или выше. Для капиллярных структур, когда-либо могут использоваться более высокие частоты.
Регулировка центральной частоты аналого-цифрового преобразователя выполняется на схемотехническом уровне. Полосовой фильтр, например, реализуется с комбинацией активных и пассивных схем. Они могут использоваться для адаптации центральной частоты и полосы пропускания фильтра к различным режимам, выделенным выше. Эти режимы обсуждаются дополнительно ниже.
Режим узкой полосы пропускания, для получения данных ультразвука ниже 1 МГц может иметь полосу пропускания в несколько десятков кГц, например, 100 кГц. Соответствующее высокое разрешение относится к Динамическому Диапазону (DR) и Отношению Сигнала к Шуму (SNR) для электронных устройств получения данных. Они считаются с высоким разрешением, если они превышают значения для классического B-режима визуализации, которые составляют величину ниже 12 бит Эффективного числа битов (ENOB). Первичная необходимость в получении данных с узкой полосой частот обусловлена тонким различием между различными тканями, что приводит к характерным отражениям с узкой полосой, которые могут быть проанализированы только с высокой точностью и высокой отдачей мощности для обнаружения сигнала с узкой полосой частот. Этот режим, например, используется для Доплеровской визуализации (непрерывной и импульсной).
Режим средней полосы пропускания служит, например, для гармонической визуализации, в которой центральная частота аналого-цифрового преобразователя является частотой гармоники частоты передачи. Преимущество гармонической визуализации заключается в том, что когда сигналы высших частот больше затухают, требуется большее усиление для их получения. Применение усиления только для этих частот будет требовать предварительной аналоговой фильтрации для избегания ограничения более сильных сигналов низших частот. Аналоговая фильтрация обычно оказывается дорогостоящей, или по рабочей площади, или по потреблению энергии.
Режим широкой полосы пропускания служит, например, для B-режима или A-режима 2D и 3D визуализации. Ширина полосы пропускания устанавливается для согласования с шириной полосы пропускания преобразователя аналого-цифрового преобразователя.
Эти три режима могут рассматриваться как полностью независимые, но они могут, например, использоваться в последовательности. То, какой режим будет использоваться, зависит от применения или измерения в пределах применения.
Например, при сканировании беременности, B-режим визуализации может быть использован для общей визуализации, тогда как Доплеровская визуализация может использоваться для специфического измерения кровотока, например, в сердце зародыша. Предоставление возможности выполнения обоих режимов при одном ультразвуковом внешнем интерфейсе обеспечивает эффективность и сбережение затрат. Характеристика ткани может снова быть полностью независимым измерением, которое используется вне тела для лучшего получения характеристик тканей или границ тканей, или внутри тела (например, использование катетеров).
Процедура визуализации может, таким образом, включать в себя начальное использование B-режима визуализации (получение данных с широкой полосой пропускания и низшим разрешением), за которым затем следует гармоническая визуализация с более высоким разрешением и, наконец, завершаться измерением с получением данных изображений с максимальной точностью (как это достижимо при использовании режима с узкой полосой пропускания). Это полезно, когда данные от начальных режимов визуализации с низким разрешением используются для введения более тонких режимов, например, сужая объем, который должен быть визуализирован с очень высокой точностью.
Имеются различные варианты переключения между режимами. Один подход для этих трех режимов заключается в том, что они выполняются последовательно и только несколько параметров необходимы для перехода от одного режима к следующему. Альтернативно, режимы могут перемежаться. Например, после сканирования малого объема в B-режиме, Доплеровское исследование или исследование Ткани используется для более глубокой оценки результатов или для предоставления входного сигнала для последующего получения данных в B-режиме.
На Фиг.11 показана схема управления для управления полосой пропускания фильтра преобразователя 110. Выходной сигнал фильтра предоставляется на DSP 130, который управляет контроллером 18 преобразователя. Сигналы синхронизации от контроллера 18 преобразователя используются для управления фильтром.
Блок DSP 130 учитывает то, какие сигналы использовались для передачи (частота и ширина полосы частот) и требуемый режим визуализации (что определяет, какие полосы частот должны быть преобразованы). В этом случае, DSP 130 требует настроить аналоговый полосовой фильтр в контуре так, что он центрируется в требуемой полосе пропускания преобразования. Известны подходы, как настроить отклик аналогового фильтра, с использованием, в качестве опорной, известной фиксированной частоты (например, главного частотного компонента передаваемого сигнала).
Различные режимы работы допускаются в соответствии с конструкцией, вводя программируемость коэффициентов фильтра (граничная часта коэффициента передачи интеграторов и значения коэффициентов прямого и обратного управления в фильтрах контура обратной связи, показанных на чертежах). Предпочтительный вариант осуществления программируемости будет зависеть от конструкции фильтра. В случае активных фильтров с резистором-конденсатором (RC) или управляемым напряжением конденсатором (Gm-C), которые обычно предпочитаются, коэффициенты, реализуются выбором соответственных значений для резисторов, конденсаторов и значений управления напряжением.
Например, для топологии на Фиг.12 и 13 (описанной ниже) центральная частота определяется граничной частотой коэффициента передачи интеграторов и локальными каналами обратной связи.
Для изменения центральной частоты фильтра до требуемой гармоники, все коэффициенты должны масштабироваться. Обычно для фиксированного тактового сигнала все коэффициенты масштабируются с идентичным коэффициентом масштабирования N, который предварительно вычисляется. Кроме того, для каждого коэффициента, по меньшей мере, два значения осуществляются в аппаратных средствах: номинальное значение и N раз номинальное значение. Для каждой новой полосы пропускания используется новое значение N, и аппаратные средства допущены в течение осуществления.
Если все коэффициенты масштабируются с тем же самым коэффициентом N, изменяется центральная частота, но не ширина полосы пропускания. Для регулировки также полосы пропускания, различные полюса в передаточной функции H(s) масштабируются с различным коэффициентом. И снова коэффициент масштабирования предварительно вычисляется и доступен в аппаратных средствах.
Это масштабирование может использоваться для фиксированного тактового сигнала, пока центральная частота преобразования ниже fs/4 (fs - частота осуществления выборки). Это требование необходимо для поддержания стабильности аналого-цифрового преобразователя. Кроме того, подобно полюсам, нуль передаточной функции H(s) (в числителе передаточной функции) должен масштабироваться с теми же самыми коэффициентами. Частота передачи и ее гармоники могут, таким образом, использоваться для калибровки номинальных коэффициентов передаточной функции и коэффициентов масштабирования N.
Когда это переменное полосовое преобразование в цифровую форму сигнала используется в системе ультразвуковой визуализации, то допускается очень гибкая и эффективная по энергии и по рабочей площади конструкция.
Преобразователь может быть использован в системе на Фиг.3 с аналоговым формированием пучка. Однако, он допускает разнообразие новых опций, если преобразование в цифровую форму выполняется очень рано в цепи обработки сигналов до какого-либо формирования пучка.
В частности, подход тогда обращен к следующим проблемам:
(i) Аналого-цифровое преобразований широкого частотного диапазона в несколько МГц является очень дорогостоящим в отношении энергии и площади чипа. Стоимость зависит также в большой степени от требуемого разрешения, так, что широкополосные высокоточные преобразователи (>13 ENOB) обычно имеют сотни милливатт потребляемой мощности. В полосовой конфигурации энергетические требования значительно снижаются с уменьшением полосы пропускания преобразования.
(ii) Полосовые сигма-дельта преобразователи очень универсальны, и внешний интерфейс получения данных может быть приспособлен с помощью электроники, с несколькими конфигурационными битами, для работы от режима с очень узкой полосой (например, несколько кГц для визуализации на основе CMUT) до полной полосы пропускания CMUT. Это может быть сделано очень быстро, даже без адаптации напряжений смещения CMUT, таким образом, увеличивая скорость реконфигурации и избегая артефактов переключения смещения.
(iii) Полосовое получение данных, естественно ограничивает количество данных, поскольку фактически получаются данные только частотного диапазона, который необходим конкретному варианту визуализации. Нежелательная шумовая полоса может быть легко отфильтрована с простыми цифровыми фильтрами. Это дополнительно упрощает требования ко всей системе и снижает ее потребляемую мощность и стоимость.
В отличие от классического аналогового полосового получения данных, где используются аналоговые полосовые фильтры, предложенное осуществление имеет преимущества намного более высокой скорости. Аналоговые полосовые фильтры обычно медленны, поскольку они нуждаются во времени установления для каждого последовательного получения данных сигнала. В полосовых сигма-дельта преобразователях процесс установления происходит при запуске, и в течение нормальной работы встроенный фильтр работает от установившегося режима и, таким образом, реагирует очень быстро на введение изменений сигнала.
Осуществление также более стабильно. Поскольку аналоговый полосовой фильтр обычно содержит резонаторы или другие фильтры с положительной обратной связью, то они очень подвержены нестабильности, особенно фильтры более высокого порядка. В полосовой сигма-дельта архитектуре, стабильность гарантируется благодаря существующей петле отрицательной обратной связи, и конструкция фильтра может гарантировать ее стабильность.
Конструкция также легче масштабируется и конфигурируется. Это происходит вследствие нескольких введенных дополнительных степеней свободы, например, тактовая частота, цифро-аналоговый преобразователь и программируемость квантизатора, что допускает очень широкие возможности конфигурирования полосовой центральной частоты и ширины полосы пропускания.
Фильтр может быть использован для допущения передачи на одной частоте и детектирования на другой с реконфигурацией электронного внешнего интерфейса.
Фильтр 112 может быть осуществлен различным образом.
На Фиг.12 показано осуществление схемы на Фиг.9, имеющей многоуровневый аналого-цифровой преобразователь 72 и цифро-аналоговый преобразователь 74. Настраиваемый полосовой фильтр 112 имеет структуру обратной связи, в которой аналоговый сигнал обратной связи подается через первые элементы 120 усиления с коэффициентом fx для добавления узлов структуры. Вторые элементы 122 усиления с коэффициентом gx находятся в каналах обратной связи к узлам добавления. Между узлами есть интеграторы.
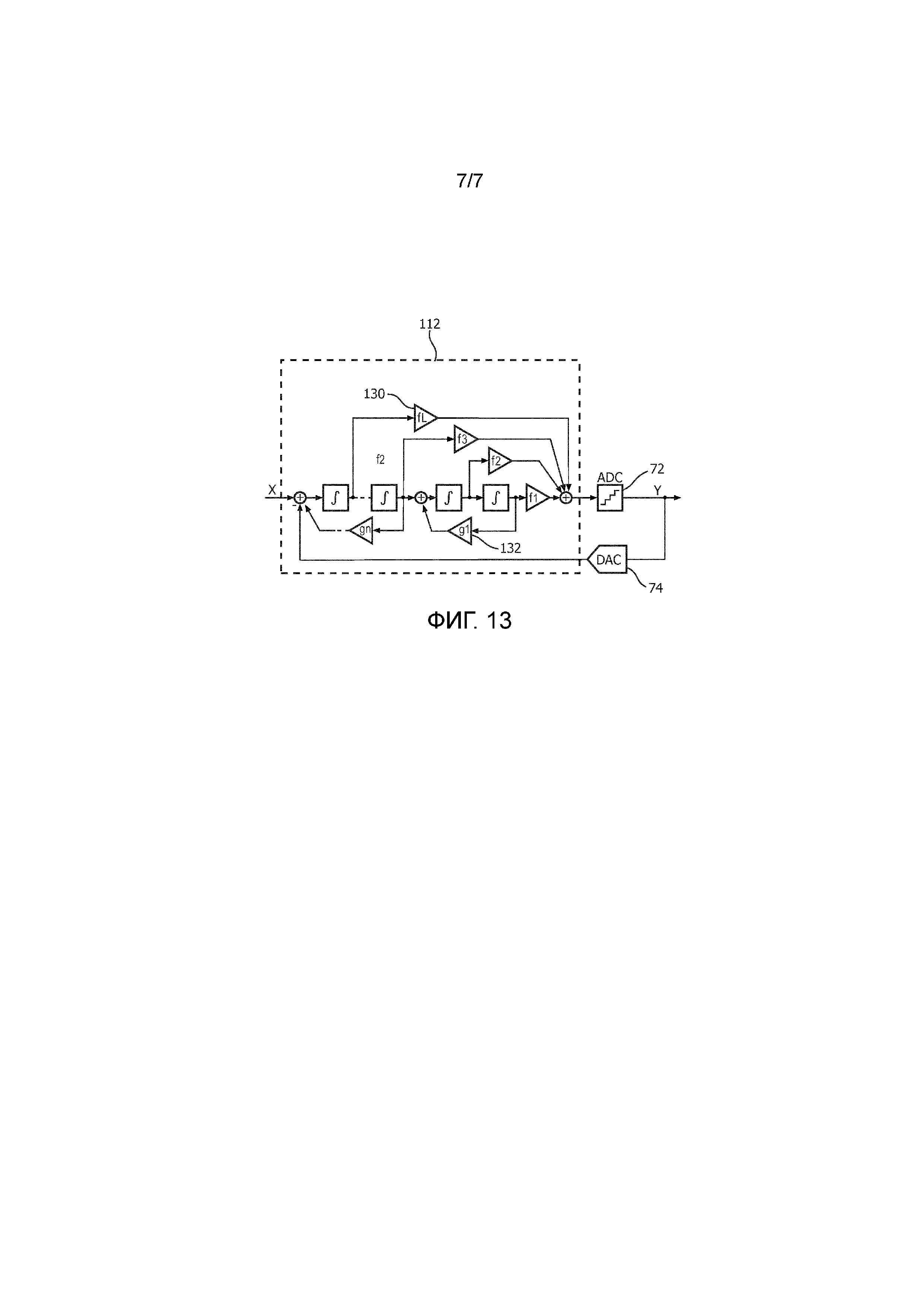
На Фиг.13 показано осуществление схемы на Фиг.9, также имеющей многоуровневый аналого-цифровой преобразователь 72 и цифро-аналоговый преобразователь 74. Настраиваемый полосовой фильтр 112 имеет структуру прямой связи, в которой аналоговый сигнал обратной связи подается только на первый узел добавления структуры. Имеются элементы 130 усиления прямой связи с коэффициентом fx, приводящим к конечному узлу добавления. Имеются также элементы 132 усиления обратной связи с коэффициентом gx, приводящим к узлам добавления структуры. Между узлами также есть интеграторы.
Имеются только два известных примера возможной программируемой структуры полосового фильтра, которая может быть использована в пределах преобразователя. Другие структуры фильтра также могут быть использованы.
Фильтры являются программируемыми, делая коэффициенты fx и gx в архитектуре программируемыми, как описано выше.
Посредством примера, связь между контроллером 18 и аналого-цифровым преобразователем 110 (Фиг.11) может быть сигналом опорной частоты, который используется для адаптации коэффициентов fx и gx, так, что частотная характеристика фильтра согласуется с опорным сигналом. Это может быть сделано, например, адаптацией коэффициентов до тех пор, пока отклик фильтра на опорный сигнал не будет максимизирован.
Может иметься более одного опорного сигнала от контроллера 18 на преобразователь 110. Сигналы могут быть статическими для переключения фильтра на предварительно запрограммированное известное состояние, или они могут служить для адаптации фильтра к опорному сигналу. Опорный сигнал может быть переменным во времени. Наиболее просто осуществление может иметь все режимы, допускаемые в аппаратных средствах при конструировании. Контроллер может тогда переключать режимы и только калибровать, если это необходимо.
Другие вариации к раскрытым вариантам реализации могут быть поняты и произведены специалистами в данной области техники при осуществлении заявляемого изобретения, из изучения чертежей, раскрытия, и приложенной формулы. В формуле, выражение "содержащий" не исключает другие элементы или этапы, и выражение в единственном числе не исключает множества. То, что некоторые положения приведены во взаимно различающихся зависимых пунктах формулы, не означает, что комбинация этих положений не может быть использована для получения преимущества. Любые условные обозначения в пунктах формулы не следует рассматривать как ограничение объема притязаний изобретения.
Реферат
Группа изобретений относится к области медицинской техники, а именно к зонду системы ультразвуковой визуализации, и ко всей системе в целом, и к способу визуализации, в частности она относится к схемам аналого-цифрового преобразователя, используемым в таких приложениях визуализации. Зонд системы ультразвуковой визуализации содержит: головку преобразователя визуализации, выполненную с возможностью передачи ультразвукового сигнала на частоте передаваемого ультразвука, и схему приема для обработки принятых отраженных ультразвуковых сигналов. Схема приема содержит аналого-цифровой сигма-дельта преобразователь, который содержит замкнутый контур, который содержит настраиваемый полосовой фильтр с настраиваемой центральной частотой и шириной полосы пропускания. Центр полосы пропускания настраиваемого полосового фильтра является перестраиваемым между первой частотой, которая соответствует частоте передаваемого ультразвука, и второй частотой, которая соответствует требуемой гармонике частоты передаваемого ультразвука. Ультразвуковая диагностическая система визуализации содержит: вышеописанный зонд системы ультразвуковой визуализации, контроллер для управления зондом, формирователь пучка и схему обработки сигналов для обработки сигналов от схемы приема для генерации ультразвукового изображения. Способ ультразвуковой визуализации содержит: предоставление ультразвукового сигнала в визуализируемый объем с использованием головки преобразователя визуализации и обработку принятых отраженных ультразвуковых сигналов посредством настройки полосового фильтра в пределах замкнутого контура аналого-цифрового сигма-дельта преобразователя. Причем полосовой фильтр имеет настраиваемую центральную частоту и ширину полосы пропускания. При этом способ содержит установку центра полосы пропускания настраиваемого полосового фильтра на частоту передаваемого ультразвука или на требуемую гармонику частоты передаваемого ультразвука. Это позволяет аналого-цифровому преобразователю обрабатывать только требуемую полосу частот. Ширина полосы пропускания преобразования ADC и ENOB являются, таким образом, программируемыми, обеспечивая более эффективную конструкцию зонда, а также предоставляя аналого-цифровое преобразование уже в цепи обработки сигналов. 3 н. и 10 з.п. ф-лы, 13 ил.
Комментарии