Система соединения ступица-профиль для осевого вентилятора и осевой вентилятор, снабженный этой системой - RU2470192C2
Код документа: RU2470192C2
Чертежи






Описание
Настоящее изобретение относится к системе соединения ступица - профиль для осевого вентилятора. Также изобретение распространяется на осевой вентилятор, снабженный данной системой соединения.
Уровень техники
Осевые вентиляторы широко применяются в тех случаях, где требуются перемещение большого количества воздуха, преодолевая даже высокое статическое давление, в частности, в системах, в которых воздух применяется для охлаждения за счет теплообмена. В этом случае применяются вентиляторы, имеющие очень большой диаметр, достигающий двадцати метров.
В конструкции такого типа вентилятора соединение между ступицей и частью крыла, предназначенной для перемещения воздуха, в дальнейшем называемой профилем, является чрезвычайно важной проблемой, поскольку механическое напряжение в этом месте достигает своего максимума, и вследствие этого подобное соединение является областью, подверженной опасности повреждения.
Наиболее близким к группе изобретений является система соединения ступица - профиль осевого вентилятора, содержащая ступицу, одно или более крыльев, имеющих профиль для перемещения воздуха, и средства соединения одного или более крыльев со ступицей, и осевой вентилятор, снабженный системой соединения ступица-профиль (US 2004/00090640 А1, 15.01.2004).
Раскрытие изобретения
Задача настоящего изобретения - создание системы соединения ступица - профиль для осевых вентиляторов, которая по сравнению с известными системами соединения (шарнирными, с гибкой или жесткой связью) обеспечивает низкие статические и динамические нагрузки, простоту конструкции и более высокий момент сопротивления.
Поставленная задача достигается тем, что в системе соединения ступица-профиль осевого вентилятора, содержащей ступицу, одно или более крыльев, имеющих профиль для перемещения воздуха, и средства соединения одного или более крыльев со ступицей, согласно изобретению средства соединения состоят из двух отдельных и различающихся подвижных элементов, закрепленных на стороне ступицы к крепежному блоку и на стороне крыла к соответствующему крепежному блоку. В осевом вентиляторе поставленная задача достигается тем, что согласно изобретению он снабжен указанной выше системой соединения ступица-профиль.
По сравнению с известными техническими решениями система соединения ступица-профиль настоящего изобретения имеет следующие преимущества:
- по сравнению с системами жесткой связи понижаются статические и динамические нагрузки, что ведет к снижению затрат, а также уменьшается вибрация;
- по отношению к системам с шарнирной связью обеспечивает простоту конструкции, возможность по желанию изменять степень подвижности в вертикальной плоскости и отсутствие износа;
- в отличие от систем соединения с помощью гибкой связи обеспечивает высокий момент сопротивления (и поэтому возможность применения более экономичных материалов с худшими механическими характеристиками, причем с одинаковым сечением), более высокую прочность при кручении и более высокую устойчивость в вертикальной плоскости (с последующим решением проблемы чрезмерного уменьшения профиля в вентиляторах большого диаметра).
Краткое описание чертежей.
Эти и другие задачи, преимущества и характеристики следуют из нижеследующего описания предпочтительного варианта реализации соединения ступица-профиль и осевого вентилятора согласно настоящему изобретению, показанному с помощью примера, не ограничивающего изобретение, со ссылкой на сопроводительные чертежи, на которых:
фиг.1 - основные силы, воздействующие на крылья работающего осевого вентилятора;
фиг.2-4 - системы соединения ступица - профиль, выполненные согласно известным техническим решениям;
фиг.5 - схематический вид сбоку системы согласно изобретению;
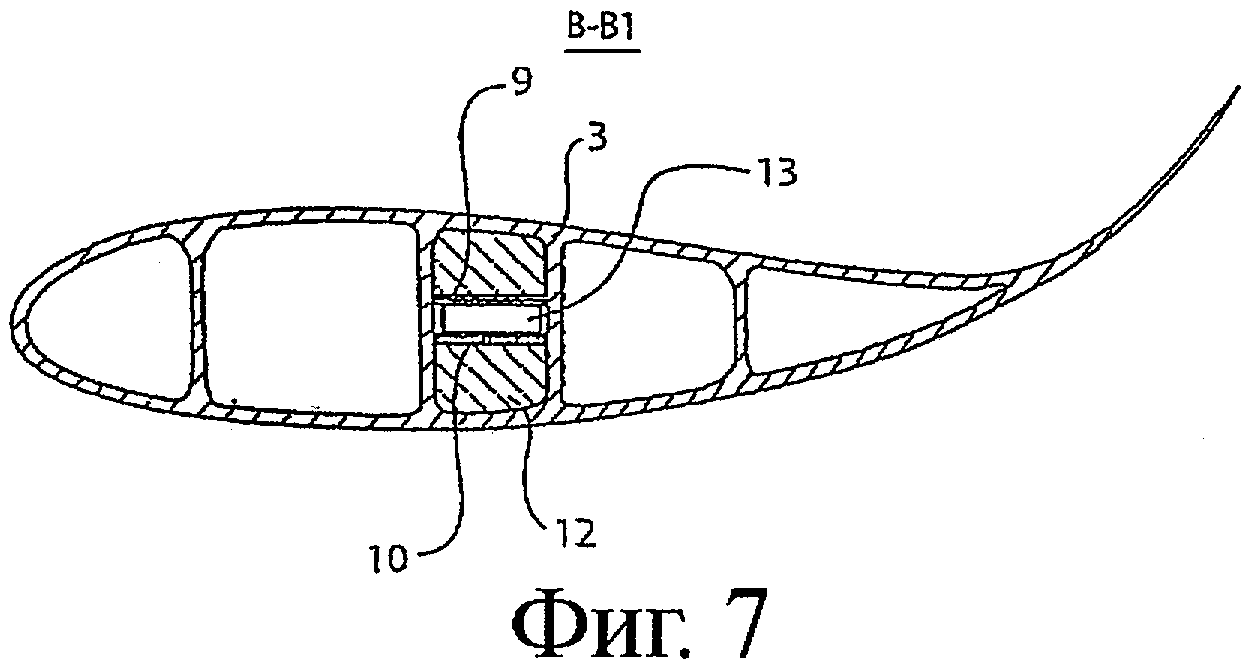
фиг.6 и 7 - система, изображенная на фиг.5, в разрезе по линии А-А1 и В-В1 соответственно;
фиг.8 и 9 - два различных варианта реализации системы согласно изобретению.
Осуществление изобретения
С целью лучшего понимания системы согласно настоящему изобретению на Фиг.1 показаны основные силы, воздействующие на крыло работающего осевого вентилятора, т.е. центробежная сила CF, имеющая радиальное направление, аэродинамическая сила тяги TF с осевым направлением, сила веса PF с осевым направлением.
Эти силы образуют изгибающий момент и крутящий момент, которые вместе со статическими и динамическими нагрузками следует учитывать при конструкторских расчетах размеров вентилятора. Уменьшение этих моментов позволяет обеспечить существенное снижение стоимости работ.
Соединение 4 между ступицей 1 и профилем 3 крыла 2 осевого вентилятора в настоящее время в основном выполняется тремя способами: посредством жесткой системы, шарнирной системы и гибкой системы.
Эти три типа соединения будут кратко описаны с указанием их основных преимуществ и недостатков для сравнения с системой соединения согласно изобретению, чтобы выделить его превосходство.
В случае системы жесткого соединения (Фиг.2) соединение ступица - профиль выполняется с помощью элемента 5, неподвижно закрепленного в плоскости вращения, а также в перпендикулярной ей плоскости, обычно с круглым сечением, жесткость которого зависит от размера профиля. Средством, применяющимся в этом случае для уменьшения изгибающего момента и созданных им механических напряжений, которые здесь достигают максимума, является наклон оси крыла по отношению к плоскости вращения в направлении, противоположном воздушному потоку под углом α. Этот наклон, обусловливающий жесткость элемента, будет фиксированным. Благодаря этому средству в соответствии с профилем вентилятор под действием центробежной силы может создавать момент, направленный противоположно моменту, создаваемому силой тяги, в результате уменьшая изгибающий момент. Однако недостатком системы является ее неэффективность в отношении динамических нагрузок.
В известных шарнирных системах соединения (Фиг.3) соединение ступица - профиль выполняется посредством шарнира 6, ось которого перпендикулярна оси вращения. В этом случае во время работы вентилятора профиль свободно вращается в вертикальной плоскости, постоянно позиционируясь в области, где центробежная сила создает момент, имеющий величину и направление, противоположное тому, что создается силой тяги, компенсирующий изгибающий момент. Угол β, образованный крылом с плоскостью вращения, в этом случае изменяется. Основной недостаток описанной системы заключается в том, что крылья вентилятора из-за свободы, предоставляемой им шарниром, имеют тенденцию неограниченно опускаться, поэтому требуется упор для удержания в фиксированном положении. Более того, эта система очень чувствительна к действию воздушной струи, и с течением времени происходит перемещение частей шарнира относительно друг друга, неизбежно сопровождающееся износом.
Наконец, в случае гибкого соединения (Фиг.4) соединение ступица - профиль состоит из тонкого элемента 7, неподвижного в плоскости вращения, но обеспечивающего высокую подвижность в плоскости, перпендикулярной плоскости вращения. Во время работы вентилятора элемент будет прогибаться, и его часть будет вращаться, давая возможность профилю вращаться в вертикальной плоскости и занимать постоянное положение в области, где центробежная сила, воздействующая на профиль, создает момент, направление которого противоположно моменту силы тяги. В этом случае во время работы изменяется угол β. Продольное сечение подвижного элемента имеет параболическую форму с максимальным искажением со стороны ступицы. К недостаткам относятся чрезмерное уменьшение крыльев в вентиляторах большого диаметра и недостаточная прочность при кручении подвижного элемента. Следовательно, под действием крутящего момента он имеет тенденцию к искривлению, потере гибкости и изменению установки шага профиля.
Предложенная система соединения ступица 1 - профиль 3, как показано на Фиг.5, образована с помощью сборочного узла 8, содержащего два подвижных элемента 9, 10 предпочтительно прямоугольного сечения, которые на участке между двумя крепежными блоками 11 со стороны ступицы 1 и 12 со стороны профиля 3 соответственно разделены промежутком 14. Таким образом, два элемента 9, 10 соответственно разделены и отличны друг от друга. Очевидно, что присутствующие силы при работе вентилятора будут действовать на оба элемента по-разному, так как они будут деформированы также по-разному.
Элементы 9, 10 со стороны профиля 3 могут либо входить в прямой контакт или между ними устанавливается распорная деталь 13 (Фиг.7). Указанная деталь выполняется из материала с более низким модулем упругости по сравнению с материалом обоих указанных элементов и вследствие этого, когда крыло 2 подвергается обычным рабочим нагрузкам, то она позволит элементам 9 и 10 самим перемещаться взаимно так, чтобы обусловить более интенсивное вращение секций при одинаковой нагрузке.
Угол δ нижнего элемента 10 может быть либо положительным, либо отрицательным, как показано на Фиг.9, либо равным нулю (как показано на Фиг.8) относительно плоскости вращения (Фиг.5).
Кроме того, оба элемента могут быть конусовидными, иметь различные геометрические характеристики и в разрезе, и в плане или даже быть изготовлены из разных материалов.
Применение двух отдельных и различающихся элементов, которые созданы в соответствии с вышеописанным и могут взаимно располагаться в пространстве по желанию, позволяет конструировать соединение ступица - профиль с разными модулями сопротивления, максимальными на стороне ступицы и уменьшающимися по направлению к профилю, и получить в результате при работе профиля под нагрузкой вращение секций с образованием возрастающего угла относительно вертикали. Продольное сечение элементов 9, 10 может иметь форму окружности или параболы с максимальным радиусом кривизны со стороны профиля.
Система соединения дает возможность профилю наклоняться относительно горизонтальной плоскости, постоянно позиционируясь в области, где центробежная сила позволяет профилю создавать силу такой величины и направления, которые противоположны величине и направлению силы тяги, что способствует компенсированию изгибающего момента. Система также обеспечивает высокую степень отклонения в вертикальной плоскости, в результате чего уменьшаются и динамические, и статические нагрузки. Настоящее изобретение позволяет это осуществить управляемым способом, что не в состоянии обеспечить известные технические решения.
Для того чтобы облегчить понимание настоящего изобретения, на Фиг.5 представлен простейший вариант крепления крыла к ступице, т.е. вариант, при котором крыло не является подвижным. Следует подчеркнуть, что крепежные блоки 11 и 12 могут быть сконструированы таким образом, чтобы обеспечить возможность закрепления крыла шплинтом, и изобретение также применимо и к этому типу вентилятора.
Реферат
Система соединения ступица-профиль для осевого вентилятора состоит из ступицы 1, к которой крепятся одно или более крыльев, имеющих профиль 3 для перемещения воздуха. Система содержит два отдельных, отличающихся друг от друга подвижных элемента 9, 10, укрепленных на стороне ступицы 1 к крепежному блоку 11 и на стороне крыла 2 к соответствующему крепежному блоку 12. По сравнению с системами с жестким креплением система согласно изобретению предлагает уменьшение статических и динамических нагрузок, снижение вибраций и экономичность. По сравнению с системами с шарнирным креплением преимуществом является простота конструкции, возможность желаемого свободного перемещения в вертикальной плоскости и отсутствие износа. В отличие от систем соединения с гибким креплением система соединения согласно изобретению обеспечивает более высокий момент сопротивления (а следовательно, возможность применения более экономичных материалов с худшими механическими характеристиками, причем при одинаковом сечении), более высокую прочность при кручении и более высокую жесткость в вертикальной плоскости (с соответствующим решением проблемы чрезмерного уменьшения профиля в вентиляторах большого диаметра). 2 н. и 7 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Осевой вентилятор
Комментарии