Способ и система для определения положения источника звука - RU2523624C2
Код документа: RU2523624C2
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу и системе для обработки звукового сигнала, в частности относится к способу и системе для определения положения источника звука посредством обработки звукового сигнала.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Стетоскоп представляет собой очень популярное диагностическое устройство, которое используют в госпиталях и клиниках. В последние годы стетоскоп дополнили множеством новых технологий, чтобы сделать аускультацию более удобной и более надежной. Дополнительные новые технологии включают подавление окружающих шумов, автоматическое определение частоты сердечных сокращений, автоматическую регистрацию и анализ фонокардиограммы (ФКГ) и т.д.
Различные органы или даже различные части органа могут издавать внутренние звуки организма, что обозначает, что внутренние звуки вызваны различными положениями тела. В качестве примера возьмем тоны сердца: митральный и трикуспидальный клапаны образуют тон сердца S1; аортальный клапан и клапан легочного ствола образуют тон сердца S2; а шумы могут исходить от клапанов, камер или даже сосудов. Обычно лучшим местом для аускультации является место, в котором наблюдают наибольшую интенсивность и наиболее полный диапазон частот на всей поверхности тела. В настоящее время определение положения внутреннего источника звука выполняет вручную квалифицированный врач, что требует значительного клинического опыта и значительной сосредоточенности.
Однако неврачу трудно овладеть аускультативными навыками определения положения внутреннего источника звука ручным способом, поскольку это требует знания анатомии человека. Кроме того, ограниченность человеческого слуха и восприятия также влияет на определение положения внутреннего источника звука в организме. Например, тоны сердца S1 и S2 могут быть близки друг к другу, но оба они генерируются различными частями сердца. Неквалифицированный человек может неточно различить S1 и S2.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в создании системы для удобного и точного определения положения источника звука.
Система для определения положения источника звука, указанная система содержит:
- принимающий блок для приема направляющих звуковых сигналов по меньшей мере от двух направляющих акустических датчиков и приема команды выбора, которая содержит тип сегмента сигнала, который соответствует источнику звука, где по меньшей мере два направляющих акустических датчика размещены на головке стетоскопа,
- блок выбора для выбора сегмента из каждого направляющего звукового сигнала в соответствии с типом сегмента сигнала,
- вычислительный блок для вычисления разности между сегментами, выбранными из направляющих звуковых сигналов, и
- генерирующий блок для генерации сигнала индикации перемещения, чтобы направлять перемещение головки стетоскопа к источнику звука в соответствии с разностью.
Преимущество состоит в том, что система может автоматически генерировать указания для перемещения для точного определения положения источника звука и не зависит от навыков врача.
Настоящее изобретение также относится к способу, который соответствует системе для определения положения источника звука.
Далее приведены подробное объяснение и другие аспекты по изобретению.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Указанные выше и другие задачи и признаки настоящего изобретения будет легче понять из следующего подробного описания, рассматриваемого в связи с прилагаемыми чертежами, на которых:
на фиг.1 изображен стетоскоп в соответствии с вариантом осуществления изобретения;
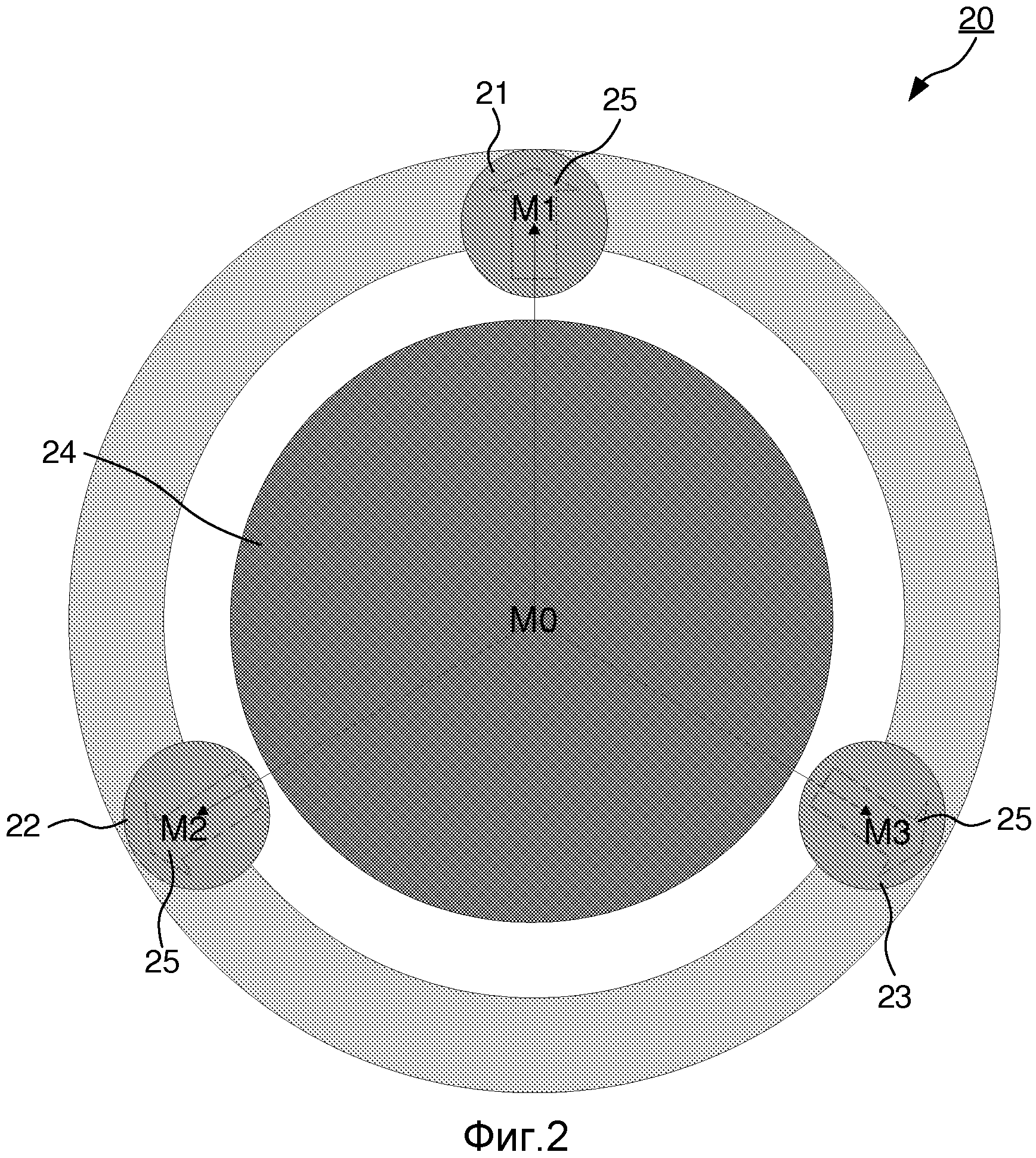
на фиг.2 изображена головка стетоскопа в соответствии с вариантом осуществления стетоскопа 1 на фиг.1;
на фиг.3 изображена система для определения положения источника звука в соответствии с вариантом осуществления стетоскопа 1 на фиг.1;
на фиг.4 изображен пользовательский интерфейс в соответствии с вариантом осуществления стетоскопа 1 на фиг.1;
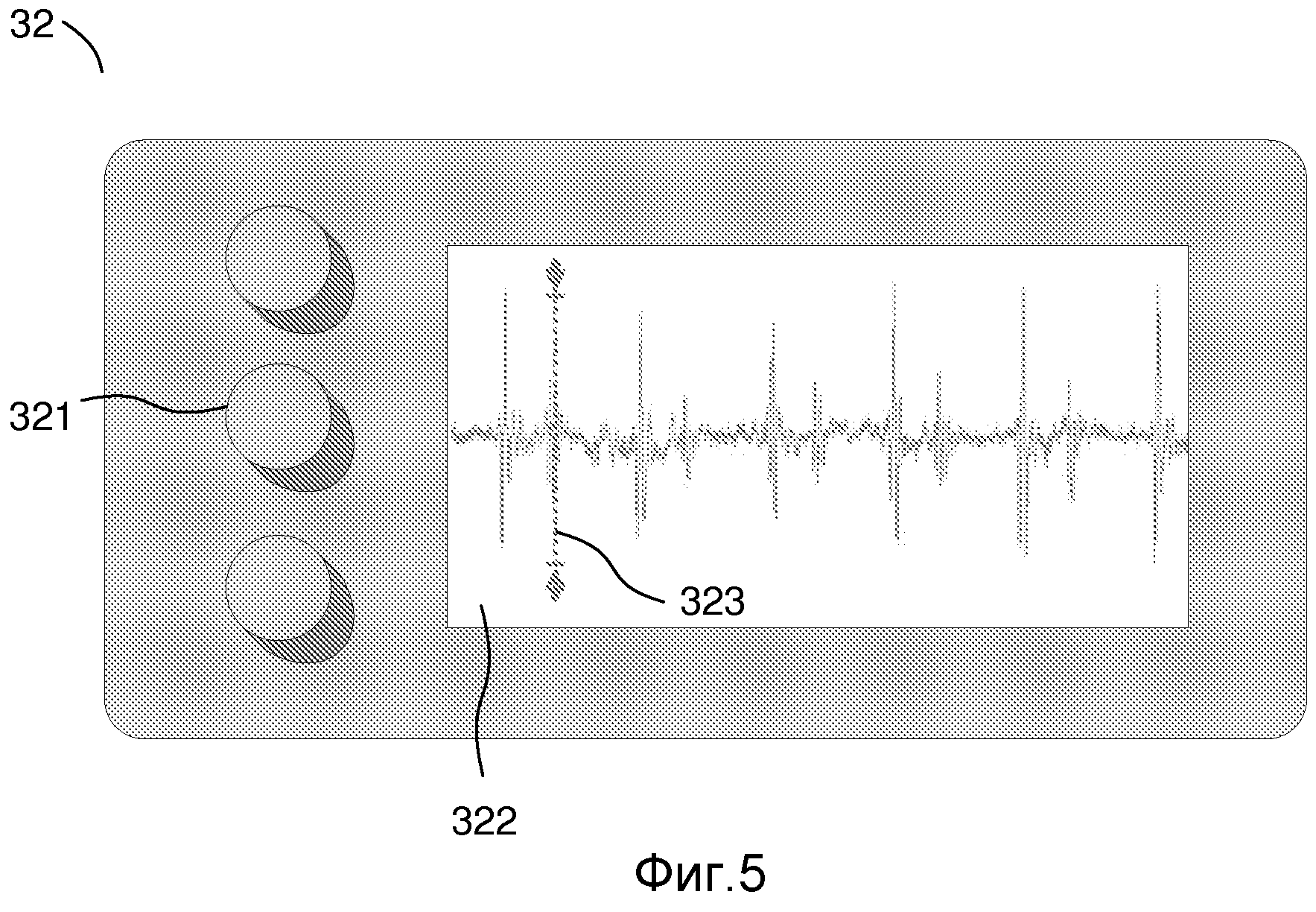
на фиг.5 изображен пользовательский интерфейс в соответствии с другим вариантом осуществления стетоскопа 1 на фиг.1;
на фиг.6A изображена форма волны звукового сигнала до выбора;
на фиг.6B изображена форма волны звукового сигнала после выбора;
на фиг.7A изображена форма волны отфильтрованного сердечного звукового сигнала;
на фиг.7B изображена форма волны выступающих сегментов;
на фиг.8 приведена статистическая гистограмма интервалов между последовательными пиковыми точками выступающих сегментов;
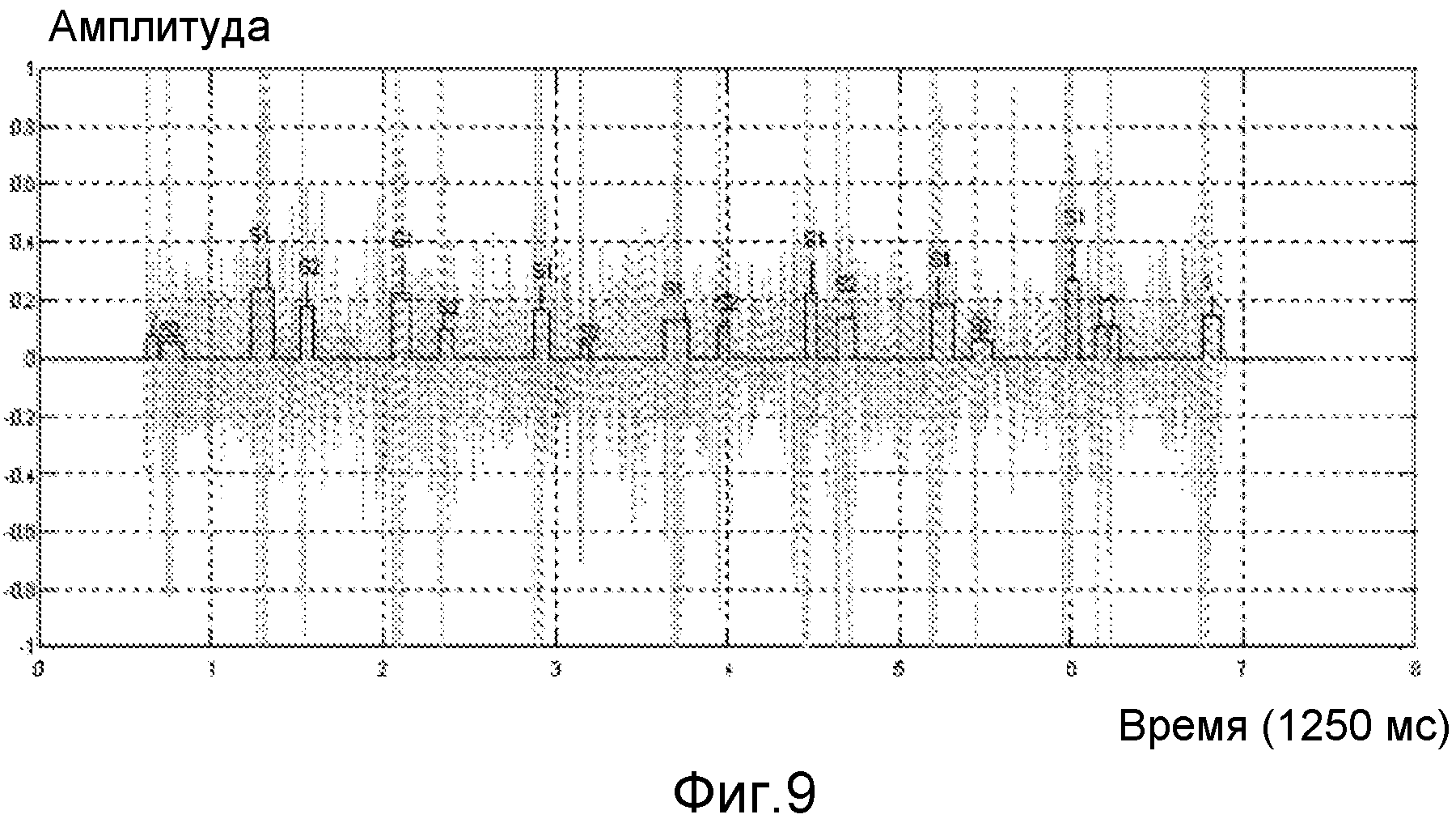
на фиг.9 изображена аннотированная форма волны сердечного звукового сигнала;
на фиг.10 изображен способ определения положения источника звука в соответствии с вариантом осуществления изобретения.
Одинаковые номера позиций обозначают одинаковые части на всех фигурах.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг.1 изображен стетоскоп в соответствии с вариантом осуществления изобретения. Стетоскоп 1 содержит головку стетоскопа 20, устройство управления 30 и соединительное устройство 10 для соединения головки стетоскопа 20 с устройством управления 30. Также стетоскоп 1 может содержать наушники 40, соединенные с головкой стетоскопа 20 через устройство управления 30 и соединительное устройство 10.
На фиг.2 изображена головка стетоскопа 20 в соответствии с вариантом осуществления стетоскопа 1 на фиг.1. Головка стетоскопа 20 содержит основной акустический датчик 24 (также обозначен как M0 на фиг.2), первый направляющий акустический датчик 21 (также обозначен как М1 на фиг.2), второй направляющий акустический датчик 22 (также обозначен как M2 на фиг.2) и третий направляющий акустический датчик 23 (также обозначен как M3 на фиг.2). Направляющие акустические датчики 21-23 окружают основной акустический датчик 24, расположенный между ними. Предпочтительно, основной акустический датчик 24 расположен в центре головки стетоскопа 20, а расстояния от центра основного акустического датчика 24 до каждого направляющего акустического датчика одинаковы, и углы между каждыми двумя соседними направляющими акустическими датчиками одинаковы. Направляющие акустические датчики 21-23 и основной акустический датчик 24 соединены с устройством управления 30 посредством соединительного устройства 10. Кроме того, основной акустический датчик 24 может соединяться с наушниками 40 через устройство управления 30 и соединительное устройство 10.
Головка стетоскопа 20 дополнительно содержит индикатор 25. Индикатор 25 может содержать несколько СИД источников света. Каждый источник света соответствует направляющему акустическому датчику и размещен рядом с соответствующим направляющим акустическим датчиком в том же месте. Источники света могут включаться для того, чтобы указывать направление перемещения головки стетоскопа с тем, чтобы определить положение основного акустического датчика 24 около источника звука.
Необязательно индикатор 25 может содержать громкоговоритель (не показан на фигурах). Громкоговоритель используют, чтобы генерировать голос, чтобы направлять перемещение головки стетоскопа 20 с тем, чтобы определить положение основного акустического датчика 24 около источника звука.
Индикаторы 25 соединены со схемой (не показана на фигурах), и схему используют для приема сигнала от устройства управления 30 для управления включением/выключением индикаторов 25. Схему можно поместить в головке стетоскопа 20 или в устройстве управления 30.
На фиг.3 изображена система для определения положения источника звука в соответствии с вариантом осуществления стетоскопа 1 на фиг.1. Система 31 содержит принимающий блок 311, блок выбора 312, вычислительный блок 313 и генерирующий блок 314.
Принимающий блок 311 используют для приема направляющих звуковых сигналов (обозначены NSS на фиг.3) по меньшей мере от двух направляющих акустических датчиков 21-23. Также принимающий блок 311 используют для приема команды выбора (обозначена S1 на фиг.3), и команда выбора содержит тип сегмента сигнала, соответствующий источнику звука, положение которого предположительно подлежит определению пользователем. По меньшей мере два направляющих акустических датчика 21-23 размещены на головке стетоскопа 20, и головка стетоскопа 20 дополнительно содержит основной акустический датчик 24.
Каждый направляющий звуковой сигнал может содержать несколько сегментов (или сегментов сигнала), которые относятся к различным типам сегмента сигнала. Например, сердечный звуковой сигнал, зарегистрированный акустическим датчиком, может содержать несколько различных типов сегмента сигнала, обусловленных различными источниками звука, таких как сегмент S1, сегмент S2, сегмент S3, сегмент S4, сегмент шумов. S1 обусловлен закрытием митрального и трикуспидального клапанов; S2 возникает в процессе закрытия аортального клапана и клапана легочного ствола; S3 возникает благодаря быстрому наполнению желудочков во время ранней диастолы; S4 возникает в результате сокращения предсердия, которое вытесняет кровь в расширенный желудочек; шумы могут быть вызваны турбулентным течением крови. S1 может делиться на М1, обусловленный митральным клапаном, и T1, обусловленный трикуспидальным клапаном, а S2 может делиться на A2, обусловленный аортальным клапаном, и P2, обусловленный клапаном легочного ствола. S3, S4 и шумы обычно неразличимы и вероятно связаны с сердечно-сосудистыми заболеваниями.
Пользователь может давать команду выбора для выбора типа сегмента сигнала, соответствующего конкретному источнику звука, положение которого нужно определить, с тем чтобы узнать, поражен ли источник звука заболеванием. Например, если выбрать тип сегмента сигнала S1, то соответствующим конкретным источником звука являются митральный и трикуспидальный клапаны.
Блок выбора 312 используют для выбора сегмента из каждого направляющего звукового сигнала в соответствии с типом сегмента сигнала.
Вычислительный блок 313 используют для вычисления разности между сегментами, выбранными из направляющих звуковых сигналов. Например, вычислительный блок 313 предназначен для вычисления разности между выбранным сегментом от первого акустического датчика 21 и выбранным сегментом от второго акустического датчика 22; для вычисления разности между выбранным сегментом от второго акустического датчика 22 и выбранным сегментом от третьего акустического датчика 23; и для вычисления разности между выбранным сегментом от первого акустического датчика 21 и выбранным сегментом от третьего акустического датчика 23.
Вычислительный блок 313 предназначен для вычисления разности ВП (времени прихода) каждого сегмента в устройство управления 30, поскольку направляющие акустические датчики 21-23 расположены в разных участках головки стетоскопа 20, и когда головка стетоскопа 20 находится на теле, расстояния от каждого направляющего акустического датчика до источника звука могут различаться, следовательно, ВП каждого выбранного сегмента отличается.
Вычислительный блок 313 также может быть предназначен для вычисления разности между сегментами путем вычисления разности фаз сегментов. Разность фаз можно измерять посредством аппаратного обеспечения (такого как логическая микросхема, программируемая в условиях эксплуатации) или программного обеспечения (такого как алгоритм корреляции).
Генерирующий блок 314 используют для генерации сигнала индикации перемещения (обозначен MIS на фиг.3), чтобы направлять перемещение головки стетоскопа 20 к источнику звука в соответствии с разностью с тем, чтобы определить положение основного акустического датчика 24 около источника звука. Разность может представлять собой разность ВП или разность фаз.
Генерирующий блок 314 может быть предназначен для:
- определения ближайшего к источнику звука направляющего акустического датчика в соответствии с разностью между сегментами, и
- получения сигнала индикации перемещения, чтобы направлять перемещение головки стетоскопа 20 в направлении ближайшего к источнику звука направляющего акустического датчика.
В качестве примера возьмем разность фаз, и, если фаза сегмента, принятого от первого направляющего акустического датчика 21, больше фазы сегмента, принятого от второго направляющего акустического датчика 22, то это обозначает, что расстояние между источником звука и вторым направляющим акустическим датчиком 22 меньше расстояния между источником звука и первым направляющим акустическим датчиком 21. Головку стетоскопа 20 следует перемещать в направлении от первого направляющего акустического датчика 21 ко второму направляющему акустическому датчику 22.
В соответствии с разностью фаз, ближайший к источнику звука направляющий акустический датчик можно определить путем сравнения расстояний между источником звука и первым направляющим акустическим датчиком 21, между источником звука и вторым направляющим акустическим датчиком 22 и между источником звука и третьим направляющим акустическим датчиком 23. Итоговое указание для перемещения по направлению к источнику звука определяют в направлении ближайшего направляющего акустического датчика.
Схема может принимать сигнал индикации перемещения от генерирующего блока 314. Схема может включать индикатор 25, чтобы указать направление перемещения головки стетоскопа 20 в соответствии с сигналом индикации перемещения. Если индикатор 25 является громкоговорителем, схема, используемая для управления индикатором 25, генерирует голос, чтобы направлять перемещение головки стетоскопа 20 в соответствии с сигналом индикации перемещения, с тем чтобы определить положение основного акустического датчика 24 около источника звука; если индикатор 25 содержит несколько источников света, схема, используемая для управления источником света, включает источник света, который соответствует ближайшему направляющему акустическому датчику, чтобы направлять перемещение головки стетоскопа 20, с тем чтобы определить положение основного акустического датчика 24 около источника звука.
Генерирующий блок 314 можно использовать для того, чтобы определить, превышает ли разность между сегментами предварительно заданный порог. Если разность ниже предварительно заданного порога, то генерирующий блок 314 может быть дополнительно предназначен для генерации сигнала остановки перемещения (показан как SMS). Схема может принимать сигнал остановки перемещения для управления выключением индикатора 25.
На фиг.4 изображен пользовательский интерфейс в соответствии с вариантом осуществления стетоскопа 1 на фиг.1.
Пользовательский интерфейс 32 устройства управления 30 содержит несколько кнопок 321 и информационное окно 322, такое как дисплей. Информационное окно 322 используют для отображения формы волны звукового сигнала; пользователь управляет кнопками 321 для ввода команды выбора для выбора типа сегмента сигнала в соответствии со свойствами, отображаемыми в форме волны звукового сигнала.
Свойства, отображаемые в форме волны, могут представлять собой пик, точку минимума, амплитуду, длительность, частоту и т.д.
На фиг.5 изображен пользовательский интерфейс в соответствии с другим вариантом осуществления стетоскопа 1 на фиг.1. Пользовательский интерфейс 32 может содержать ползунок 323 для перемещения вдоль формы волны, чтобы выбрать конкретный тип сегмента сигнала в соответствии со свойством формы волны.
В дополнительном варианте осуществления стетоскопа 1 информационное окно 322 может представлять собой сенсорный экран, на который пользователь может нажимать ручкой или пальцем, чтобы вводить команды выбора для выбора типа сегмента сигнала из формы волны звукового сигнала в соответствии со свойством формы волны.
В соответствии с командой выбора пользователя блок выбора 312 системы 31 также можно использовать для управления информационным окном 322, чтобы отображать выбранный сегмент и соответствующие последующие сегменты, относящиеся к тому же типу, что и выбранный сегмент, чтобы повторно отображать выбранный сегмент в информационном окне 32.
Многие стандартные цифровые стетоскопы уже имеют функцию выбора сегмента из звукового сигнала и затем только повторно отображают выбранный сегмент в информационном окне во время приема звукового сигнала.
В одном из вариантов осуществления изобретения блок выбора 312 можно использовать следующим способом.
На фиг.6A показана форма волны звукового сигнала до выбора, а на фиг.6B показана форма волны звукового сигнала после выбора.
В качестве примера возьмем сердечный звуковой сигнал, форма волны сердечного звукового сигнала может длиться по меньшей мере 5 секунд, с тем чтобы помочь блоку выбора 312 выбрать тип сегмента сигнала в соответствии с командой выбора пользователя. Предполагая, что нужно выбрать сегмент S2, блок выбора 312 может быть предназначен для:
- анализа команды выбора для выбора сегмента S2 из сердечного звукового сигнала;
- фильтрации сердечного звукового сигнала посредством полосного фильтра. Например, с частотой отсечения 10-100 Гц сердечного звукового сигнала. На фиг.7A показана форма волны отфильтрованных сердечных звуковых сигналов;
- получения нескольких точек измерения из каждого сегмента отфильтрованной формы волны, где форма волны предположительно разделена на несколько сегментов;
- выделения выступающих сегментов, которые имеют наибольшие средние амплитудные отклонения в соответствии с вычислениями среднего амплитудного отклонения для каждого сегмента. Например, верхние 5-10% сегментов с наибольшим средним амплитудным отклонением обозначают как выступающие волны. На фиг.7B показана форма волны для выступающих сегментов;
- измерения интервалов между последовательными пиковыми точками выступающих сегментов для построения статистической гистограммы интервалов между последовательными пиковыми точками выступающих сегментов. На фиг.8 приведена статистическая гистограмма интервалов между последовательными пиковыми точками выступающих сегментов. Статистическую гистограмму можно построить посредством вычисления времени появления каждого типа интервалов;
- вычисления интервала между S1 и S2 (далее обозначен как интервал S1-S2) на основе статистической гистограммы. Интервал S1-S2 стабилен в течение короткого периода, например 10 секунд. В статистической гистограмме интервал S1-S2 обычно появляется наиболее часто. На фиг.8 интервал между двумя последовательными пиками в пределах 2000-2500 элементов выборки (или 0,25-0,31 секунды при частоте дискретизации 8 кГц) появляется 6 раз, что является наивысшей частотой появления, и соответствует интервалу S1-S2;
- вычисления интервала между S2 и S1 на основе статистической гистограммы. Подобным образом интервал S2-S1 также стабилен в течение короткого периода и длиннее интервала S1-S2. В статистической гистограмме частота появления интервала S2-S1 ниже только частоты появления интервала S1-S2. На фиг.8 интервал между двумя последовательными пиками в пределах 5500-6000 элементов выборки (или 0,69-0,75 секунды при частоте дискретизации 8 кГц) возникает 5 раз, что ниже только частоты появления интервала S1-S2, и соответствует интервалу S2-S1;
- идентификации сегмента S2 на основе интервала S1-S2 и интервала S2-S1. Сегмент S1 идентифицируют посредством поиска по всей форме волны выступающих сегментов на основе интервала S1-S2 и интервала S2-S1. Например, если интервал между любыми двумя последовательными пиками попадает в пределы интервала S1-S2, как показано на фиг.8, 2000-2500 элементов выборки, то сегмент, соответствующий предыдущему пику, определяют как S1, а последующий пик определяют как S2;
- вывода последующей формы волны для идентифицированного сегмента S2, как показано на фиг.6B. Последующую форму волны для идентифицированных сегментов S2 по меньшей мере из одного из направляющих звуковых сигналов сравнивают друг с другом для вычисления разности посредством вычислительного блока 313.
Дополнительно, блок выбора 312 также можно использовать для аннотирования формы волны звукового сигнала по типу сегмента сигнала, чтобы пользователь мог дать точную команду выбора в соответствии с аннотированной формой волны. В процессе аннотирования, например, формы волны сердечного звукового сигнала, блок выбора 312 используют для:
- получения нескольких точек измерения из формы волны сердечного звукового сигнала, где форму волны предположительно делят на несколько сегментов;
- измерения интервалов между последовательными пиковыми точками формы волны в соответствии со статистической гистограммой, как показано на фиг.8, построенной путем вычисления времени появления каждого типа интервала;
- вычисления интервала S1-S2 на основе статистической гистограммы. В статистической гистограмме интервал S1-S2 обычно появляется наиболее часто. Интервал между двумя последовательными пиками в пределах 2000-2500 элементов выборки (или 0,25-0,31 секунды при частоте дискретизации 8 кГц) возникает 6 раз, что является наивысшей частотой появления, и соответствует интервалу S1-S2;
- вычисления интервала S2-S1 на основе статистической гистограммы. В статистической гистограмме частота появления интервала S2-S1 ниже только частоты появления интервала S1-S2. Интервал между двумя последовательными пиками в пределах 5500-6000 элементов выборки (или 0,69-0,75 секунды при частоте дискретизации 8 кГц) появляется 5 раз, что ниже только частоты появления интервала S1-S2, и соответствует интервалу S2-S1;
- идентификации сегментов S1 и сегментов S2 на основе интервала S1-S2 и интервала S2-S1. Сегменты S1 идентифицируют посредством поиска по всей форме волны на основе интервала S1-S2 и интервала S2-S1. Например, если интервал между любыми двумя последовательными пиками попадает в пределы известного интервала S1-S2, как показано на фиг.8, 2000-2500 элементов выборки, то сегмент, соответствующий предыдущему пику, определяют как S1, а последующий пик определяют как S2;
- аннотирования сегментов S1 и сегментов S2 по форме волны сердечного звукового сигнала. На фиг.9 показана форма волны для аннотированного сердечного звукового сигнала. Неповторяющиеся сегменты, которые рассматривали как шум, также определяли и обозначали как «?» на фиг.9.
Кроме того, если имеет место расщепление сигнала S1 или/и сигнала S2, то расщепление сигнала S1 и сигнала S2 можно аннотировать посредством анализа пиков сигнала S1 и сигнала S2. Например, расщепленный сигнал S1 обозначали как М1 и T1 (не показаны на фиг.9).
На фиг.10 показан способ определения положения источника звука в соответствии с вариантом осуществления изобретения. Способ включает в себя этап приема 101, этап выбора 102, этап вычисления 103 и этап генерации 104.
Этап приема 101 предназначен для приема направляющих звуковых сигналов по меньшей мере от двух направляющих акустических датчиков 21-23. Этап приема 101 также предназначен для приема команды выбора, и команда выбора содержит тип сегмента сигнала, соответствующего источнику звука, положение которого предположительно подлежит определению пользователем. На головке стетоскопа 20 расположены по меньшей мере два направляющих акустических датчика 21-23, и головка стетоскопа дополнительно содержит основной акустический датчик 24.
Каждый направляющий звуковой сигнал может содержать несколько сегментов (или сегментов сигнала), которые относятся к различным типам сегментов сигнала. Например, сердечный звуковой сигнал, принятый акустическим датчиком, может содержать несколько различных типов сегментов сигнала, такие как сегмент S1, сегмент S2, сегмент S3, сегмент S4, сегмент шумов. S1 обусловлен закрытием митрального и трикуспидального клапанов; S2 возникает в процессе закрытия аортального клапана и клапана легочного ствола; S3 возникает благодаря быстрому наполнению желудочков во время ранней диастолы; S4 возникает в результате сокращения предсердий, выталкивающих кровь в расширенный желудочек; шумы могут быть вызваны турбулентным течением крови. S1 может расщепляться на М1, обусловленный митральным клапаном, и T1, обусловленный трикуспидальным клапаном, а S2 может расщепляться на A2, обусловленный аортальным клапаном, и P2, обусловленный клапаном легочного ствола. S3, S4 и шумы обычно неразличимы и вероятно связаны с сердечно-сосудистыми заболеваниями.
Пользователь может дать команду выбора для выбора типа сегмента сигнала, соответствующего конкретному источнику звука с тем, чтобы узнать, поражен ли источник звука заболеванием, и типа сегмента сигнала, выбранного пользователем. Например, нужно выбрать тип звукового сигнала S1, значит, соответствующими конкретными источниками звука являются митральный и трикуспидальный клапаны.
Этап выбора 102 предназначен для выбора сегмента из каждого направляющего звукового сигнала в соответствии с типом сегмента сигнала.
Этап вычисления 103 предназначен для вычисления разности между сегментами, выбранными из направляющих звуковых сигналов. Например, этап вычисления 103 предназначен для вычисления разности между выбранным сегментом от первого акустического датчика 21 и выбранным сегментом от второго акустического датчика 22; для вычисления разности между выбранным сегментом от второго акустического датчика 22 и выбранным сегментом от третьего акустического датчика 23; и для вычисления разности между выбранным сегментом от первого акустического датчика 21 и выбранным сегментом от третьего акустического датчика 23.
Этап вычисления 103 также может быть предназначен для вычисления разности между сегментами посредством вычисления разности фаз сегментов. Разность фаз можно измерить посредством аппаратного обеспечения (такого как логическая микросхема, программируемая в условиях эксплуатации) или программного обеспечения (такого как алгоритм корреляции).
Этап генерации 104 предназначен для генерации сигнала индикации перемещения (обозначен MIS на фиг.3), чтобы направлять перемещение головки стетоскопа 20 к источнику звука в соответствии с разностью, с тем чтобы определить положение основного акустического датчика 24 около источника звука. Разность может представлять собой разность ВП или разность фаз.
Этап генерации 104 может быть предназначен для:
- определения ближайшего к источнику звука направляющего акустического датчика в соответствии с разностью между сегментами, и
- получения сигнала индикации перемещения, чтобы направлять перемещение головки стетоскопа 20 в направлении ближайшего к источнику звука направляющего акустического датчика.
Этап генерации 104 может быть предназначен для определения, превышает ли разность между сегментами предварительно заданный порог. Если разность ниже предварительно заданного порога, то этап генерации 104 может быть дополнительно предназначен для генерации сигнала остановки перемещения (обозначен SMS). Схема может принимать сигнал остановки перемещения для управления выключением индикатора 25.
Многие стандартные цифровые стетоскопы уже имеют функцию выбора сегмента из звукового сигнала и затем только повторно отображают выбранный сегмент в информационном окне во время приема звукового сигнала.
Предположим, что нужно выбрать сегмент из сердечного звукового сигнала, как показано на фиг.6A. В одном из вариантов осуществления изобретения этап выбора 102 может быть предназначен для:
- анализа команды выбора для выбора сегмента S2 из сердечного звукового сигнала;
- фильтрации сердечного звукового сигнала посредством полосного фильтра. Например, с частотой отсечения 10-100 Гц сердечного звукового сигнала. Отфильтрованный сердечный звуковой сигнал показан на фиг.7A;
- получения нескольких точек измерения из каждого сегмента отфильтрованной формы волны, где форма волны предположительно разделена на несколько сегментов;
- выделения выступающих сегментов, которые имеют наибольшие средние амплитудные отклонения в соответствии с вычислениями среднего амплитудного отклонения для каждого сегмента. Например, верхние 5-10% сегментов с наибольшим средним амплитудным отклонением обозначают как выступающие волны. Форма волны выделенных выступающих сегментов показана на фиг.7B;
- измерения интервалов между последовательными пиковыми точками выступающих сегментов для построения статистической гистограммы интервалов между последовательными пиковыми точками выступающих сегментов. Статистическую гистограмму, которая показана на фиг.8, можно построить посредством вычисления времени появления каждого типа интервалов;
- вычисления интервала между S1 и S2 (далее обозначен как интервал S1-S2) на основе статистической гистограммы. Интервал S1-S2 стабилен в течение короткого периода, например 10 секунд. В статистической гистограмме интервал S1-S2 обычно появляется наиболее часто. Интервал между двумя последовательными пиками в пределах 2000-2500 элементов выборки (или 0,25-0,31 секунды при частоте дискретизации 8 кГц) появляется 6 раз, что является наивысшей частотой появления, и соответствует интервалу S1-S2;
- вычисления интервала между S2 и S1 на основе статистической гистограммы. Подобным образом интервал S2-S1 также стабилен в течение короткого периода и длиннее интервала S1-S2. В статистической гистограмме частота появления интервала S2-S1 ниже только частоты появления интервала S1-S2. На фиг.8 интервал между двумя последовательными пиками в пределах 5500-6000 элементов выборки (или 0,69-0,75 секунды при частоте дискретизации 8 кГц) возникает 5 раз, что ниже только частоты появления интервала S1-S2, и соответствует интервалу S2-S1;
- идентификации сегмента S2 на основе интервала S1-S2 и интервала S2-S1. Сегмент S1 идентифицируют посредством поиска по всей форме волны выступающих сегментов на основе интервала S1-S2 и интервала S2-S1. Например, если интервал между любыми двумя последовательными пиками попадает в пределы интервала S1-S2, как показано на фиг.8, 2000-2500 элементов выборки, то сегмент, соответствующий предыдущему пику, определяют как S1, а последующий пик определяют как S2;
- вывода последующей формы волны для идентифицированного сегмента S2, как показано на фиг.6B. Последующую форму волны для идентифицированных сегментов S2 по меньшей мере из одного из направляющих звуковых сигналов сравнивают друг с другом для вычисления разности посредством вычислительного блока 313.
Следует отметить, что приведенные выше варианты осуществления иллюстрируют, а не ограничивают настоящее изобретение, а также что специалисты в данной области смогут разработать альтернативные варианты осуществления, не отступая от объема прилагаемой формулы изобретения. В формуле изобретения любые ссылки, помещенные в скобки, не следует рассматривать в качестве ограничения формулы изобретения. Слово «содержит» не исключает наличия элементов или этапов, не перечисленных в формуле изобретения или в описании. Упоминание элемента в единственном числе не исключает присутствия этого элемента во множественном числе. Настоящее изобретение можно воплотить посредством блока или аппаратного обеспечения, содержащего несколько отдельных элементов, или посредством блока запрограммированного компьютера. В пунктах формулы изобретения, характеризующих систему, перечислено несколько блоков, некоторые из которых можно воплотить посредством одного и того же элемента, реализованного в аппаратном обеспечении или программном обеспечении. Использование слов первый, второй и третий и т.д. не указывает на какой-либо порядок. Такие слова следует интерпретировать как названия.
Реферат
Изобретение относится к средствам для определения положения источника звука. Система содержит принимающий блок для приема направляющих звуковых сигналов по меньшей мере от двух направляющих акустических датчиков и для приема команды выбора, содержащей тип сегмента сигнала, соответствующего источнику звука, причем по меньшей мере два направляющих акустических датчика расположены в головке стетоскопа, блок выбора для выбора сегмента из каждого направляющего звукового сигнала, вычислительный блок для вычисления разности между сегментами, выбранными из направляющего звукового сигнала, и генерирующий блок для генерации сигнала индикации перемещения, чтобы направлять перемещение головки стетоскопа к источнику звука в соответствии с разностью. Использование изобретения позволяет повысить удобство использования и точность при определении положения источника звука 4 н. и 11 з.п. ф-лы, 10 ил.
Формула
- принимающий блок (311) для приема направляющих звуковых сигналов по меньшей мере от двух направляющих акустических датчиков (21, 22, 23) и приема команды выбора, содержащей тип сегмента сигнала, соответствующий источнику звука, причем упомянутые по меньшей мере два направляющих акустических датчика размещены на головке стетоскопа (20),
блок выбора (312) для выбора сегмента из каждого направляющего звукового сигнала в соответствии с типом сегмента сигнала,
- вычислительный блок (313) для вычисления разности между сегментами, выбранными из направляющих звуковых сигналов, и
- генерирующий блок (314) для генерации сигнала индикации перемещения для управления перемещением головки стетоскопа (20) к источнику звука в соответствии с упомянутой разностью.
- определения ближайшего к источнику звука направляющего акустического датчика в соответствии с упомянутой разностью между сегментами, и
- получения сигнала индикации перемещения для управления перемещением головки стетоскопа (20) в направлении указанного ближайшего направляющего акустического датчика.
- приема (101) направляющих звуковых сигналов по меньшей мере от двух направляющих акустических датчиков (21, 22, 23) и приема команды выбора, содержащей тип сегмента сигнала, соответствующего источнику звука, причем упомянутые по меньшей мере два направляющих акустических датчика расположены в головке стетоскопа (20),
- выбора (102) сегмента из каждого направляющего звукового сигнала в соответствии с типом сегмента сигнала,
- вычисления (103) разности между сегментами, выбранными из направляющих звуковых сигналов, и
- генерации (104) сигнала индикации перемещения для управления перемещением головки стетоскопа (20) к источнику звука в соответствии с упомянутой разностью.
- определения ближайшего к источнику звука направляющего акустического датчика в соответствии с упомянутой разностью между сегментами, и
- получения сигнала индикации перемещения для управления перемещением головки стетоскопа (20) в направлении ближайшего направляющего акустического датчика.
Комментарии