Система инъекции медицинских жидкостей - RU2609808C2
Код документа: RU2609808C2
Чертежи












Описание
Родственные заявки
По настоящей заявке испрашивается приоритет предварительной патентной заявки США №61/417,091, поданной 24 ноября 2010, озаглавленной «Система для инъекции медицинских жидкостей».
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится главным образом к области систем, используемых для инъекции одной или нескольких медицинских жидкостей объекту, такому как пациент.
Предшествующий уровень техники
В различных медицинских процедурах необходимо введение одной или нескольких медицинских жидкостей пациенту. Например, процедуры медицинской визуализации часто включают введение контрастных сред пациенту, по возможности с солевым раствором и/или другими жидкостями. Другие медицинские процедуры включают введение одной или нескольких жидкостей пациенту с терапевтической целью. Автоматические шприцы можно применять для этих типов приложений.
Автоматический шприц обычно содержит то, что в целом обозначают как силовая насадка. Один или несколько шприцев могут быть установлены на силовую насадку различным образом (например, с возможностью отсоединения, с задней загрузкой, с передней загрузкой, с боковой загрузкой). Каждый шприц обычно содержит то, что можно охарактеризовать как поршень шприца, плунжер, или тому подобное. Каждый такой поршень шприца сконструирован для взаимодействия (например, контакта и/или временного соединения) с подходящим приводным механизмом поршня шприца, встроенного в силовую насадку, так чтобы приведение в действие приводного механизма поршня шприца аксиально продвигало связанный поршень шприца внутрь относительно цилиндра шприца. Один из типичных приводных механизмов поршня шприца представляет собой плунжер, установленный на направляющий или приводной винт с резьбой. Вращение приводного винта в направлении вращения продвигает связанный плунжер в одном аксиальном направлении, в то время как вращение направляющего винта в противоположном направлении вращения продвигает связанный плунжер в направлении, противоположном аксиальному.
Изложение сущности настоящего изобретения
Различные аспекты настоящего изобретения могут быть воплощены в отношении выполнения протокола инъекции. Протокол инъекции может включать одну или несколько фаз, которые могут быть запрограммированы любым подходящим образом. Каждая фаза протокола инъекции может включать параметры инъекции, такие как общее количество жидкости, которую необходимо ввести, и скорость потока жидкости, а также возможность задержки одной или нескольких инъекций (иногда обозначаемые как «задержки» и/или «паузы»), и каждая из которых может иметь ограниченную или неограниченную продолжительность. Фаза протокола инъекции может быть направлена на одновременное введение множества жидкостей (например, контрастной среды и солевого раствора) в одном участке инъекции.
Первым аспектом настоящего изобретения является достижение увеличения скорости по меньшей мере одного приводного плунжера под действием заданного давления в контексте системы инъекции медицинской жидкости. Первый аспект может быть представлен в виде системы инъекции медицинской жидкости, включающей как приводной механизм поршня шприца, так и логическую схему управления приводным плунжером, где приводной механизм поршня шприца включает как источник привода (например, мотор любого подходящего типа) и приводной плунжер (например, аксиально перемещаемую структуру), и в которой логическая схема управления движением приводного плунжера сконфигурирована для достижения увеличения скорости приводного плунжера под действием заданного давления на связанный приводной плунжер. Первый аспект может быть также представлен в виде способа введения по меньшей мере одной жидкости с применением системы инъекции медицинской жидкости, в которую вводят данные для заданного давления для протокола инъекции (например, ввод данных в систему инъекции медицинской жидкости), и где повышение скорости приводного плунжера системы инъекции медицинской жидкости достигают за счет под действием заданного давления.
Ряд усовершенствований признаков и дополнительных признаков также применяется в первом аспекте настоящего изобретения. Эти усовершенствования признаков и дополнительные признаки могут применяться по отдельности или в комбинации. Каждый из следующих признаков как таковых, которые обсуждаются далее, могут, но не обязательном порядке, применяться с любым другим признаком или комбинацией признаков первого аспекта. Следующее описание применяется к первому аспекту, вплоть до начала обсуждения второго аспекта настоящего изобретения.
Первый аспект настоящего изобретения может быть охарактеризован как направленный на применение заданного давления для контроля того, как скорость по меньшей мере одного приводного плунжера системы инъекции медицинской жидкости повышается в течение по меньшей мере части по меньшей мере одной фазы протокола инъекции. Первый аспект может быть применен для контроля того, как скорость одного или нескольких приводных плунжеров системы инъекции медицинской жидкости будет повышаться во время любой соответствующей части протокола инъекции под действием заданного давления. Первый аспект можно применять при выполнении любого подходящего числа фаз данного протокола инъекции, в любое время при определенной фазе, и независимо от числа приводных плунжеров, двигающихся в данной фазе (например, заданное давление можно применять для контроля повышения скорости множества приводных плунжеров в определенной фазе - что можно охарактеризовать как фазу одновременной инъекции). В одном варианте осуществления единственное заданное давление связано со всем протоколом инъекции, независимо от числа фаз (например, одно и то же заданное давление можно применять по отношению к каждой фазе протокола инъекции).
Заданное давление может быть установлено в ответ на ввод пользователем, где ввод пользователем имеет форму ввода величины в систему инъекции медицинской жидкости подходящим образом (например, с помощью устройства для ввода данных любого подходящего типа) и в любом подходящем участке (например, с удаленной консоли системы инъекции медицинской жидкости; с силовой насадки автоматического инжектора из системы инъекции медицинской жидкости; с консоли, общей для автоматического инжектора из системы инъекции медицинской жидкости, и сканера и или другого устройства медицинской визуализации). Диалоговое окно, имеющее отношение к давлению (например, сообщение для пикового давления; сообщение для заданного давления), может быть представлено на одном или нескольких дисплеях системы инъекции медицинской жидкости в одном или нескольких местах. Одно или несколько устройств для ввода данных можно сделать доступными для ввода значения давления в сочетании с отмеченным сообщением, связанным с давлением. Значение для заданного давления можно установить на ту же самую величину, что при вводе пикового давления (например, в соответствии с алгоритмом, таким как заданное давление = пиковое давление минус 25 ф./кв. дюйм). Любое значение, введенное для пикового давления, можно характеризовать как данные, которые можно использовать для установки заданного давления.
Хотя скорость одного или нескольких приводных плунжеров системы инъекции медицинской жидкости может постоянно повышаться на протяжении по крайней мере одной фазы протокола инъекции и под действием заданного давления в случае первого аспекта, это не является обязательным. Заданное давление может применяться для контроля способа, при котором скорость определенного приводного плунжера повышается со времени начала конкретной фазы, до определенной более поздней точки времени (например, пока не будет достигнуто заданное давление; пока не будет достигнута заданная скорость потока для связанной фазы; до завершения связанной фазы). Любая подходящая начальная скорость может применяться с целью исходного получения скорости приводного плунжера для определенной фазы, включая нулевую скорость. После того, как скорость определенного приводного плунжера системы инъекции медицинской жидкости повысится в течение определенного периода времени, скорость данного приводного плунжера может поддерживаться на определенном значении и/или в действительности может быть снижена. Однако, любое последующее повышение(я) скорости для данного приводного плунжера может быть получено из исходного заданного давления в соответствии с первым аспектом.
Заданное давление может быть охарактеризовано как независимая переменная, в то время как производная скорость для данного приводного плунжера системы инъекции медицинской жидкости может быть охарактеризована как зависимая переменная. Дифференцирование скорости приводного плунжера может быть охарактеризовано как зависящее и/или определяемое влиянием по меньшей мере заданного давления. В одном варианте осуществления заданное давление (например, значение заданного давления) может быть значением, введенным в контрольный алгоритм движения приводного плунжера, а результатом этого контрольного алгоритма движения приводного плунжера может быть скорость приводного плунжера (например, величина скорости приводного плунжера). Если результат этого контрольного алгоритма движения приводного плунжера имеет большую амплитуду, чем ближайшее по времени выполнение того же самого контрольного алгоритма движения приводного плунжера, это можно охарактеризовать как повышение скорости приводного плунжера согласно первому аспекту. В любом случае, такой контрольный алгоритм приводного плунжера может быть выполнен в соответствии с любым подходящим основанием, таким как периодичность (например, каждые 40 миллисекунд, или в какой-либо другой подходящий период времени).
По меньшей мере одно повышение скорости приводного плунжера, достигнутое за счет заданного давления, может применяться в связи с первым аспектом. Множество повышений скорости приводного плунжера может быть достигнуто в связи с первым аспектом, и может быть предпринято (и конечно, выполнено, т.е. использовано для контроля скорости связанного приводного плунжера) в соответствии с любым подходящим основанием. Любое подходящее время может применяться в случае множества производных скорости приводного плунжера. Рассмотрим случай, где в первом аспекте постепенно возрастает скорость приводного плунжера под действием заданного давления и до любого возникновения первого условия. Первым условием может быть достижение системой инъекции медицинской жидкости заданного давления, достижение заданной скорости потока для связанной фазы, достижение конца связанной фазы, или любой их комбинацией. В одном варианте осуществления заданное давление (например, для всего протокола инъекции), заданная скорость потока (например, для связанной фазы), или то и другое может быть основано на соответствующем вводе пользователем данных в систему инъекции медицинской жидкости подходящим образом (например, с помощью устройства для ввода данных любого подходящего типа). Полученное постепенное повышение скорости приводного плунжера может быть начато в начале определенной фазы протокола инъекции, и может продолжаться в соответствии с любым подходящим основанием до любого возникновения первого условия. Время от начала фазы до возникновения первого условия во время этой фазы можно охарактеризовать как первый диапазон времени для первого аспекта. Использование заданного давления для контроля повышения скорости приводного плунжера системы инъекции медицинской жидкости может применяться в любое подходящее время при выполнении протокола инъекции, включая любое время после того, как скорость приводного плунжера действительно снижается по любой подходящей причине (например, после достижения и/или превышения заданного давления; после достижения и/или превышения заданной скорости потока для связанной фазы).
Скорость приводного плунжера может повторно достигаться в соответствии с любым подходящим основанием по меньшей мере в соответствии с заданным давлением для целей первого аспекта, что охватывает как случай, когда скорость приводного плунжера повышается в ответ на такое изменение, так и случай, когда скорость приводного плунжера снижается в ответ на такое изменение. По меньшей мере любой другой параметр (например, другую независимую переменную) можно применять для изменения скорости приводного плунжера. Например, скорость приводного плунжера (например, зависимую переменную) можно получить как из заданного давления (например, независимой переменной), так и действительного, оперативного, или наблюдаемого давления (например, независимой переменной, и далее «наблюдаемого давления»). Значение наблюдаемого давления, связанного с приведением в действие определенного приводного плунжера, можно получить подходящим образом. В одном варианте осуществления значение наблюдаемого давления получают как из мощности, используемой для продвижения приводного плунжера, так и из скорости приводного плунжера (где скорость можно определить любым подходящим образом). Любое наблюдаемое давление или значение наблюдаемого давления, используемое в первом аспекте, может быть связано с единственной точкой времени (например, наблюдаемое давление может быть в форме изменяющегося среднего значения).
Разницу между заданным давлением и отмеченным наблюдаемым давлением можно применять для получения значения скорости приводного плунжера. Скорость приводного плунжера может быть получено таким образом, чтобы попытаться снизить амплитуду ошибки между заданным давлением и наблюдаемым давлением. В одном варианте осуществления по меньшей мере пропорционально-дифференциальный контроллер используют для определения значения скорости приводного плунжера как в зависимости от заданного давления, так и в зависимости от обновленного значения наблюдаемого давления (например, с помощью пропорционального члена и дифференциального члена). В одном варианте осуществления ПИД-контроллер (пропорционально-интегрально-дифференциальный контроллер) применяют для получения значения скорости приводного плунжера как в зависимости от значения заданного давления, так и в зависимости от значения обновленного наблюдаемого давления, хотя фактически могут применяться не все три элемента такого контроллера. Любое увеличение скорости приводного плунжера в соответствии с первым аспектом может быть охарактеризовано как рекурсивно полученное, многократно полученное, и/или повторно полученное, включая применение контроллера любой из указанных конфигураций, но не ограничиваются ими.
Второй аспект настоящего изобретения направлен на многократное достижение скорости по меньшей мере одного приводного плунжера системы инъекции медицинской жидкости, где каждое такое достижение скорости основано на заданном давлении и действительном, операционном, или наблюдаемом давлении (вновь, просто «наблюдаемом давлении»), где это многократное изменение повторяют по меньшей мере на одном и том же основании от начала по меньшей мере одной фазы протокола инъекции), и где полученную скорость применяют для продвижения связанного приводного плунжера на протяжении по меньшей мере одной фазы протокола инъекции (включая, таким образом, применение такого достижения скорости для каждой фазы протокола инъекции). Второй аспект может быть в виде системы инъекции медицинской жидкости, включающей приводной механизм поршня шприца и логическую схему контроля движения приводного плунжера, где приводной механизм поршня шприца включает источник управления (например, мотор любого подходящего типа) и приводной плунжер (например, аксиально перемещаемую структуру), где логическая схема контроля приводного плунжера сконструирована для многократного достижения скорости приводного плунжера для связанного приводного плунжера из заданного давления и наблюдаемого давления, где это многократное изменение проводят по меньшей мере на одном и том же основании от начала по меньшей мере одной фазы протокола инъекции и для по меньшей мере его части, и где полученную скорость применяют для продвижения связанного приводного плунжера во время по меньшей мере части по меньшей мере одной фазы протокола инъекции. Второй аспект может также быть представлен в виде способа введения по меньшей мере одной жидкости с применением системы инъекции медицинской жидкости, где заданное давление устанавливают на основании данных, вводимых в систему инъекции медицинской жидкости, и которое относится по меньшей мере к одной фазе протокола инъекции, где скорость приводного плунжера системы инъекции медицинской жидкости получают из данного заданного давления и наблюдаемого давления от начала по меньшей мере одной фазы протокола инъекции, и в течение по меньшей мере части по меньшей мере одной фазы, и где полученную скорость применяют для продвижения связанного приводного плунжера во время связанной фазы.
Ряд усовершенствований признаков и дополнительных признаков применимы ко второму аспекту настоящего изобретения. Эти усовершенствования признаков и дополнительные признаки могут применяться по отдельности или в комбинации. Следующие признаки как таковые, обсуждаемые далее, могут, хотя и не обязательно, применяться с любыми другими признаками или комбинацией признаков второго аспекта. Следующее обсуждение относится ко второму аспекту, вплоть до начала обсуждения третьего аспекта согласно настоящему изобретению.
Второй аспект можно охарактеризовать как направленный на применение и заданного давления, и наблюдаемого давления, для контроля того, как скорость по меньшей мере одного приводного плунжера системы инъекции медицинской жидкости повышается во время по меньшей мере начальной части по меньшей мере одной фазы протокола инъекции. «Наблюдаемое давление», используемое во втором аспекте, может быть связано с единственной точкой времени, или может быть средним значением наблюдаемого давления, или значениями наблюдаемого давления, связанными с различными точками во времени (например, «наблюдаемое давление» может быть в форме изменяющегося среднего значения, или средним значением определенного числа наиболее поздних показателей наблюдаемого давления). Второй аспект можно применять для контроля того, как скорость одного или нескольких приводных плунжеров системы инъекции медицинской жидкости будет повышаться во время любой подходящей части протокола инъекции и в соответствии с заданным давлением и наблюдаемым давлением. Второй аспект можно применять при выполнении любого подходящего числа фаз данного протокола инъекции, и независимо от числа приводных плунжеров, двигающихся во время определенной фазы (например, заданное давление и наблюдаемое давление можно применять для контроля скорости единственного плунжера во время определенной фазы; заданное давление и соответствующее наблюдаемое давление можно применять для контроля скорости каждого из множества приводных плунжеров в определенной фазе - что можно охарактеризовать как фазу одновременной инъекции). В одном варианте осуществления единственное заданное давление связано со всем протоколом инъекции, независимо от числа фаз (например, одно и то же заданное давление можно применять по отношению к каждой фазе протокола инъекции).
Заданное давление может быть установлено в ответ на ввод данных пользователем, где данный ввод пользователем представляет собой значение, вводимое в систему инъекции медицинской жидкости любым подходящим образом (например, через устройство для ввода данных любого подходящего типа) и в любом подходящем участке (например, от удаленной консоли системы инъекции медицинской жидкости; от силовой насадки автоматического шприца системы инъекции медицинской жидкости; от консоли, общей для автоматического шприца системы инъекции медицинской жидкости и сканера или другого устройства медицинской визуализации). Диалоговое окно, имеющее отношение к давлению (например, диалоговое окно для пикового давления; диалоговое окно для заданного давления), может быть представлено на одном или нескольких дисплеях системы инъекции медицинской жидкости в одном или нескольких участках. Одно или несколько устройств для ввода данных могут быть доступными для ввода значения для давления в сочетании с отмеченным сообщением, имеющим отношение к давлению. Значение для заданного давления можно установить на ту же величину, что была введена для пикового давления, или заданное давление может определяться величиной, которая была введена для пикового давления (например, в соответствии с алгоритмом, таким как заданное давление = пиковое давление минус 25 ф./кв. дюйм). Любую величину, которую вводят для пикового давления, можно охарактеризовать как данные, которые можно использовать для установки заданного давления.
Хотя скорость одного или нескольких приводных плунжеров системы инъекции медицинских жидкостей можно постоянно повышать на протяжении по меньшей мере одной фазы протокола инъекции и на основе заданного давления и связанного наблюдаемого давления в случае второго аспекта, это не является обязательным. Дифференцирование скорости приводного плунжера в соответствии со вторым аспектом может повышать или снижать скорость связанного приводного плунжера, или может поддерживать текущую скорость связанного приводного плунжера. Заданное давление и наблюдаемое давление можно вместе применять для контроля способа, в котором скорость определенного приводного плунжера повышается от времени начала конкретной фазы до какой-либо более поздней точки времени (например, когда будет действительно достигнуто заданное давление; когда будет достигнута заданная скорость потока для связанной фазы; когда будет достигнут конец соответствующей фазы). Любую подходящую начальную скорость можно применять для целей исходного определения скорости приводного плунжера для определенной фазы, включая нулевую скорость. После того, как скорость определенного приводного плунжера системы инъекции медицинской жидкости повышается в течение некоторого периода времени, скорость этого приводного плунжера можно поддерживать на определенном значении и/или в действительности снижать в зависимости от заданного давления и обновленной амплитуды наблюдаемого давления. Любое последующее повышение(я) скорости для этого приводного плунжера можно получить исходя из исходного заданного давления и обновленной амплитуды наблюдаемого давления. Обновленная амплитуда наблюдаемого давления может быть получена для одной точки времени или единственного «измерения», или может быть средним значением (например, с применением изменяющегося среднего значения).
Как заданное давление, так и наблюдаемое давление можно охарактеризовать как независимые переменные, в то время как производную скорость для определенного приводного плунжера системы инъекции медицинской жидкости можно охарактеризовать как зависимую переменную. Изменение скорости приводного плунжера в соответствии со вторым аспектом можно охарактеризовать как зависимое и/или определяемое влиянием по меньшей мере заданного давления и наблюдаемого давления. В одном варианте осуществления как заданное давление (например, значение заданного давления), так и наблюдаемое давление (например, значение наблюдаемого давления) можно ввести в алгоритм контроля движения приводного плунжера, а результатом данного алгоритма контроля движения приводного плунжера может быть скорость приводного плунжера (например, значение скорости приводного плунжера). Такой алгоритм контроля приводного плунжера может быть выполнен в соответствии с подходящим основанием для многократного определения, предполагаемого в этом втором аспекте, таком как периодичность (например, каждые 40 миллисекунд, или в какой-либо другой подходящий период времени). Хотя то же самое значение заданного давления можно применять для получения скорости приводного плунжера на протяжении данной фазы протокола инъекции, обновленное значение наблюдаемого давления можно применять для каждого такого выпуска.
Скорость приводного плунжера по меньшей мере одного приводного плунжера системы инъекции медицинской жидкости можно многократно достигать в соответствии с подходящим основанием на протяжении всего протокола инъекции. Любое подходящее время можно применять для получения скорости приводного плунжера, охватываемых вторым аспектом (например, каждые 40 миллисекунд). Полученные скорости приводного плунжера могут постепенно увеличиваться во время определенной фазы до возникновения первого условия. Это первое условие может быть достижением заданного давления системы инъекции медицинской жидкости, достижением заданной скорости потока для связанной фазы, достижением конца связанной фазы, или их комбинацией. В одном варианте осуществления данные для заданного давления, заданная скорость потока, или то и другое могут быть введены в систему инъекции медицинской жидкости пользователем, посредством подходящего способа (например, через устройство для ввода данных подходящего типа). Заданная скорость приводного плунжера может достигаться в начале определенной фазы протокола инъекции, и может поддерживаться на любом подходящем основании до возникновения первого условия.
Каждое значение наблюдаемого давления, связанное с приведением в действие определенного приводного плунжера, можно получить любым подходящим образом в случае второго аспекта. В одном варианте осуществления значение наблюдаемого давления получают в зависимости от мощности, используемой для продвижения приводного плунжера, и скорости приводного плунжера (где эту скорость можно измерить любым подходящим образом). Дифференциал между заданным давлением и отмеченным наблюдаемым давлением можно применять для получения значения скорости приводного плунжера. Значение скорости приводного плунжера можно получить таким образом, чтобы попытаться снизить амплитуду ошибки между заданным давлением и наблюдаемым давлением. В одном варианте осуществления по меньшей мере пропорционально-дифференциальный контроллер применяют для получения значения скорости приводного плунжера из значения заданного давления и обновленного значения наблюдаемого давления (например, применением пропорционального члена и дифференциального члена). В одном варианте осуществления ПИД-контроллер (пропорционально-интегрально-дифференциальный контроллер) применяют для получения значения скорости приводного плунжера из значения заданного давления и из обновленного наблюдаемого давления, хотя фактически могут применяться не все три элемента такого контроллера. Любое увеличение скорости приводного плунжера в соответствии со вторым аспектом может быть охарактеризовано как рекурсивно полученное, многократно полученное, и/или повторно полученное, включая применение контроллера любой из указанных конфигураций, но не ограничиваются ими.
Третий аспект настоящего изобретения направлен на мониторинг давления, связанного с приведением в действие системы инъекции медицинской жидкости, где наблюдаемое давление определяют из значения мощности, поданной к направляющему источнику приводного механизма поршня шприца системы инъекции медицинской жидкости, а также скорости приводного плунжера того же самого приводного механизма поршня шприца. Третий аспект может быть представлен в виде системы инъекции медицинской жидкости, включающей приводной механизм поршня шприца и логическую схему контроля давления, где приводной механизм поршня шприца включает источник управления (например, мотор любого подходящего типа) и приводной плунжер (например, аксиально продвигаемую структуру), и где логическая схема контроля давления сконструирована для получения наблюдаемого давления из значения мощности, поданной на источник управления, и скорости приводного плунжера. Третий аспект может также быть представлен в виде способа инъекции по меньшей мере одной жидкости с применением системы инъекции медицинской жидкости, где по меньшей мере один приводной механизм поршня шприца осуществляет продвижение связанного приводного плунжера для введения по меньшей мере одной жидкости пациенту, и где энергию, поданную на источник управления приводного механизма поршня шприца и скорости связанного приводного плунжера (определенную любым подходящим образом) используют для получения наблюдаемого давления. Этот третий аспект может применяться в каждом из вышеуказанных первом и втором аспектах настоящего изобретения.
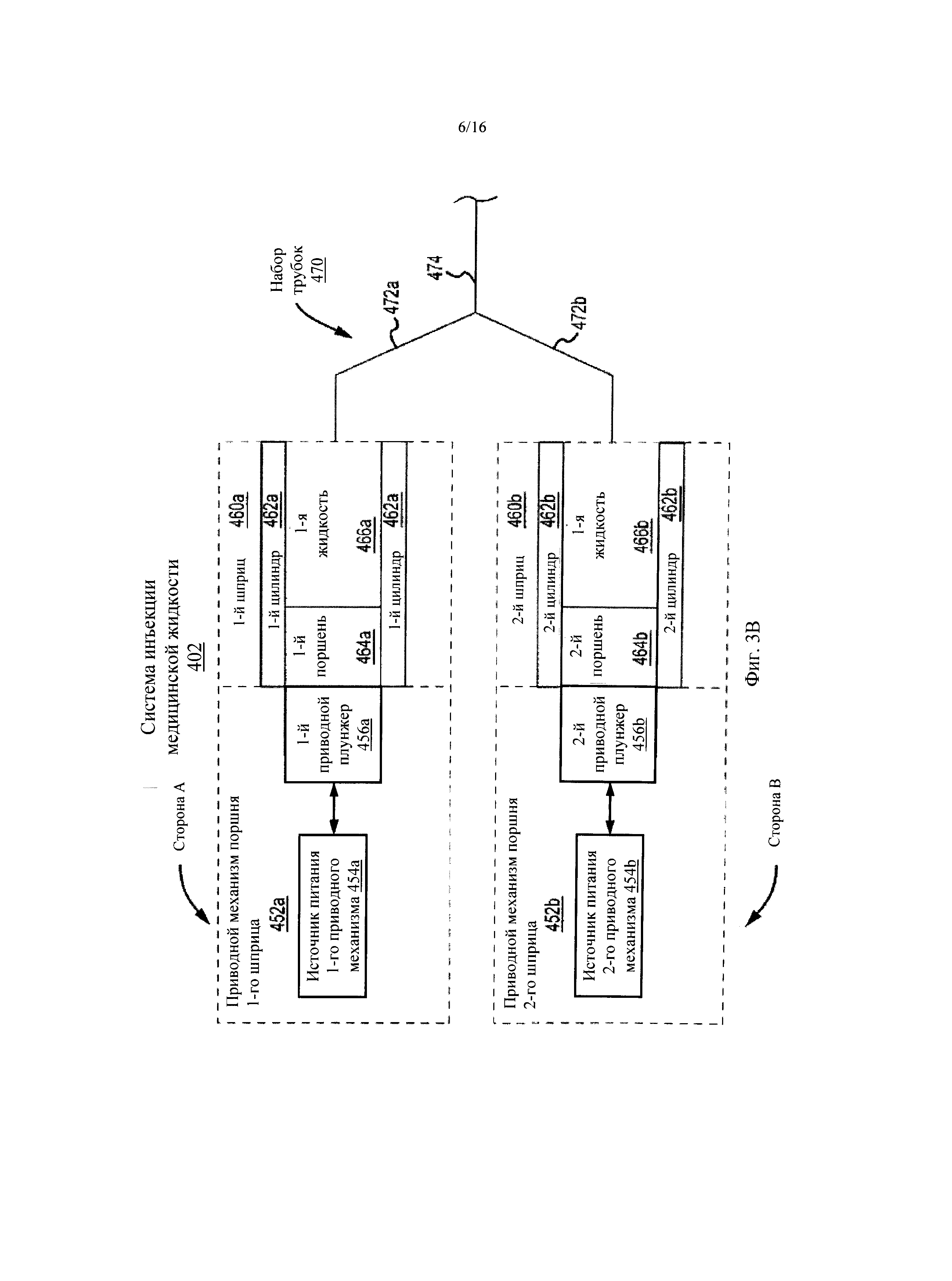
Четвертый аспект настоящего изобретения направлен на определение скорости потока для каждого из по меньшей мере двух различных приводных плунжеров системы инъекции медицинской жидкости, где это определение основано на вводимых данных общей скорости потока и концентрации по меньшей мере для одной фазы протокола инъекции, где первый и второй приводные плунжеры продвигаются одновременно. Четвертый аспект может быть представлен в виде системы инъекции медицинской жидкости, включающей первый приводной механизм поршня шприца, второй приводной механизм поршня шприца, и логическую схему определения скорости потока, где каждый такой приводной механизм поршня шприца включает источник управления (например, мотор любого подходящего типа) и приводной плунжер (например, аксиально двигающуюся структуру), и где логическая схема определения скорости потока сконструирована для расчета скорости потока для приводного плунжера каждого из первого и второго приводных механизмов поршня шприца, на основе введенных значений общей скорости потока и концентрации по меньшей мере для одной фазы протокола инъекции, где первый и второй приводные механизмы поршня шприца работают одновременно (например, фазы, где две различных медицинских жидкости вводят пациенту одновременно). Четвертый аспект может также быть представлен в виде конфигурации системы инъекции медицинской жидкости для одновременной инъекции по меньшей мере двух различных медицинских жидкостей пациенту, где и общую скорость потока, и концентрацию вводят (например ввод в систему инъекции медицинской жидкости) по меньшей мере для одной фазы протокола инъекции, где первый и второй приводные механизмы поршня шприца работают одновременно (например, фазы, где по меньшей мере две различных медицинских жидкости одновременно вводят пациенту), и где скорость потока для каждого из первого и второго приводных плунжеров рассчитывают с помощью системы инъекции медицинской жидкости на основе введенных данных общей скорости потока и концентрации для связанной фазы протокола инъекции.
Ряд усовершенствований признаков и дополнительных признаков могут применяться в четвертом аспекте настоящего изобретения. Эти усовершенствования признаков и дополнительные признаки могут применяться по отдельности или в любой комбинации. Каждый из следующих признаков как таковых, которые обсуждаются далее, могут, но не в обязательном порядке, применяться с любим другим признаком или комбинацией признаков четвертого аспекта. Следующее описание применяется к четвертому аспекту, вплоть до начала обсуждения пятого аспекта настоящего изобретения.
Первый приводной механизм поршня шприца может быть связан с первой медицинской жидкостью любого подходящего типа (например, контрастной средой), в то время как второй приводной механизм поршня шприца может быть связан со второй медицинской жидкостью любого подходящего типа (например, солевым раствором), но отличающейся по меньшей мере в некотором отношении от первой медицинской жидкости. Отмеченные вводимые данные по концентрации могут быть связаны с относительными количествами первой и второй медицинских жидкостей для одновременного введения. Введенные данные концентрации могут быть выражены любым подходящим образом, например, в форме процентов. В одном варианте осуществления вводимые данные по концентрации «30%» могут означать, что в фазу протокола инъекции, где первый и второй приводные плунжеры продвигаются одновременно, 30% от общего объема, подлежащего введению во время этой фазы, определяются первой медицинской жидкостью, а 70% от этого общего объема определяются второй медицинской жидкостью.
Вводимые данные общей скорости потока и концентрации могут быть в форме данных, введенных пользователем. Пользователь может вводить и необходимую общую скорость потока, и необходимую концентрацию для данной фазы в систему инъекции медицинской жидкости любым подходящим образом (например, через устройство для ввода данных любого подходящего типа) и в любом подходящем участке (например, с удаленной консоли системы инъекции медицинской жидкости; с силовой насадки автоматического шприца из системы инъекции медицинской жидкости; с консоли, общей для автоматического шприца системы инъекции медицинской жидкости и сканера и или другого устройства медицинской визуализации). Диалоговое окно для общей скорости потока и диалоговое окно для концентрации по меньшей мере для одной фазы могут быть представлены по меньшей мере на одном дисплее системы инъекции медицинской жидкости, в том числе и так, где диалоговые окна для общей скорости потока и концентрации для определенной фазы одновременно представлены на двух или более дисплеях. Одно или несколько устройств для ввода данных могут быть доступными для ввода необходимой общей скорости потока и концентрации для данной фазы в сочетании с соответствующими диалоговыми окнами.
Необходимо понимать, что четвертый аспект можно применять в сочетании с двумя или более фазами протокола инъекции, где одновременно двигается множество приводных плунжеров. Также необходимо понимать, что четвертый аспект можно применять в сочетании с каждой фазой протокола инъекции, где одновременно двигается множество приводных плунжеров. Четвертый аспект можно применять в комбинации с каждым из вышеупомянутых первого и второго аспектов настоящего изобретения.
Пятый аспект настоящего изобретения направлен на определение объема инъекции для каждого из по меньшей мере двух различных приводных плунжеров системы инъекции медицинских жидкостей, где это определение основано на вводимых значениях общего объема инъекции и концентрации для по меньшей мере одной фазы протокола инъекции, где первый и второй приводные плунжеры продвигаются одновременно. Пятый аспект может быть представлен в виде системы инъекции медицинской жидкости, включающей приводной механизм поршня первого шприца, приводной механизм поршня второго шприца, и логическую схему определения объема инъекции, где каждый такой приводной механизм поршня шприца включает первый источник управления (например, мотор любого подходящего типа) и приводной плунжер (например, аксиально двигающуюся структуру), и где логическая схема определения объема инъекции сконструирована для расчета объема инъекции для приводного плунжера каждого из приводных механизмов поршня первого и второго шприцев, на основе введенных данных для общего объема инъекции и концентрации для по меньшей мере одной фазы протокола инъекции, где приводной механизм поршней первого и второго шприцев работают одновременно (например, фазы, где две различных медицинских жидкости одновременно вводят пациенту). Пятый аспект может также быть представлен в виде конфигурации системы инъекции медицинской жидкости для одновременного введения по меньшей мере двух различных медицинских жидкостей пациенту, где вводят общий объем инъекции и концентрацию (например, вводят в систему инъекции медицинской жидкости) для по меньшей мере одной фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно (например, фазы, где по меньшей мере две различных медицинских жидкости одновременно вводят пациенту), и где объем инъекции для каждого из первого и второго приводных плунжеров рассчитываются системой инъекции медицинской жидкости на основе вводимых данных общего объема инъекции и концентрации для соответствующей фазы протокола инъекции.
Ряд усовершенствований признаков и дополнительных признаков применимы к пятому аспекту настоящего изобретения. Эти усовершенствования признаков и дополнительные признаки могут применяться по отдельности или в комбинации. Как таковые, следующие характеристики, обсуждаемые далее, могут, хотя и не обязательно, применяться с любыми другими характеристиками или комбинацией характеристик из пятого аспекта. Следующее обсуждение применяется к пятому аспекту, вплоть до начала обсуждения шестого аспекта из настоящего изобретения.
Приводной механизм поршня первого шприца может быть связан с первой медицинской жидкостью любого подходящего типа (например, контрастной средой), в то время как второй приводной механизм поршня шприца может быть связан со второй медицинской жидкостью любого подходящего типа (например, солевым раствором), но отличающейся по меньшей мере в некотором отношении от первой медицинской жидкости. Отмеченные вводимые данные по концентрации могут быть связаны с относительными количествами первой и второй медицинских жидкостей для одновременного введения. Введенные данные по концентрации могут быть выражены любым подходящим образом, например, в форме процентов. В одном варианте осуществления вводимые данные по концентрации «30%» могут означать, что в фазу протокола инъекции, где первый и второй приводные плунжеры продвигаются одновременно, 30% от общего объема, подлежащего введению во время этой фазы, определяются первой медицинской жидкостью, а 70% от этого общего объема определяются второй медицинской жидкостью.
Вводимые данные общей скорости потока и концентрации могут быть в форме данных, вводимых пользователем. Пользователь может вводить и необходимую общую скорость потока, и необходимую концентрацию для данной фазы в систему инъекции медицинской жидкости любым подходящим образом (например, через устройство для ввода данных любого подходящего типа) и в любом подходящем участке (например, с удаленной консоли системы инъекции медицинской жидкости; с силовой насадки автоматического шприца из системы инъекции медицинской жидкости; с консоли, общей для автоматического шприца системы инъекции медицинской жидкости и сканера или другого устройства медицинской визуализации).
Система инъекции медицинской жидкости может содержать по меньшей мере один дисплей. Данный дисплей может быть расположен в любом подходящем участке (например, внутри/снаружи комплекта для визуализации). Множество дисплеев могут применяться и располагаться в любом подходящем участке (например, встроенном в удаленную консоль (системы инъекции медицинской жидкости), расположенную вне комплекта визуализации; встроенном в силовую насадку автоматического шприца (системы инъекции медицинской жидкости), расположенного внутри комплекта визуализации; встроенном в общую консоль для сканера или другого устройства медицинской визуализации и автоматического шприца (системы инъекции медицинской жидкости), расположенного в комплекте визуализации). Диалоговое окно по общему объему инъекции и диалоговое окно по концентрации по меньшей мере для одной фазы могут быть представлены на по меньшей мере одном дисплее системы инъекции медицинской жидкости, в том числе там, где диалоговые окна по общему объему инъекции и концентрации для данной фазы одновременно представлены на двух или более дисплеях. Одно или несколько устройств для ввода данных может быть применено для ввода необходимого общего объема инъекции и концентрации для данной фазы в сочетании с соответствующими сообщениями.
Необходимо понимать, что пятый аспект можно применять в сочетании с двумя или более фазами протокола инъекции, где одновременно двигается множество приводных плунжеров. Также необходимо понимать, что четвертый аспект можно применять в сочетании с каждой фазой протокола инъекции, где одновременно двигается множество приводных плунжеров. Этот пятый аспект можно применять в комбинации с каждым из первого, второго и четвертого аспектов настоящего изобретения, упомянутых выше.
Шестой аспект настоящего изобретения направлен на представление по меньшей мере одного многоцветного графического изображения на по меньшей мере одном дисплее системы инъекции медицинской жидкости, где количество цветов в таком многоцветном графическом изображении связано с концентрацией для фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев системы инъекции медицинской жидкости работают одновременно. Шестой аспект может быть представлен в виде системы инъекции медицинской жидкости, включающей приводные механизмы поршней первого и второго шприцев, по меньшей мере один дисплей, и логическую схему контроля дисплея, где логическая схема контроля дисплея включает программируемую переменную концентрации, и где логическая схема контроля дисплея сконструирована для представления по меньшей мере одного многоцветного графического изображения на по меньшей мере одном дисплее, и корреляции количества цветов в таком многоцветном графическом изображении со значением запрограммированной переменной концентрации по меньшей мере для одной фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно. Шестой аспект может также быть представлен в виде способа управления системы инъекции медицинской жидкости, где значение концентрации является данными, вводимыми в систему инъекции медицинской жидкости, где первый и второй приводные плунжеры системы инъекции медицинской жидкости продвигаются одновременно, где по меньшей мере одно многоцветное графическое изображение представлено по меньшей мере на одном дисплее по меньшей мере для одной фазы протокола инъекции, где первый и второй приводные плунжеры продвигаются одновременно, и где количество цветов, включенных в такое многоцветное изображение, коррелирует со значением концентрации.
Ряд усовершенствований признаков и дополнительных признаков применимы к шестому аспекту настоящего изобретения. Эти усовершенствования признаков и дополнительные признаков могут применяться по отдельности или в любой комбинации. Как таковые, следующие характеристики, обсуждаемые далее, могут, хотя и не обязательно, применяться с любыми другими характеристиками или комбинацией характеристик из шестого аспекта. Следующее обсуждение применяется по меньшей мере к шестому аспекту настоящего изобретения.
Значение концентрации или значение запрограммированной переменной концентрации может быть в виде данных, вводимых пользователем. Система инъекции медицинской жидкости может включать по меньшей мере одно устройство для ввода данных любого подходящего типа. Значение концентрации или значение запрограммированной переменной концентрации может вводиться посредством любого такого устройства для ввода данных.
Значение концентрации или значение запрограммированной переменной концентрации может относиться к общему количеству первой медицинской жидкости и к общему количеству второй медицинской жидкости, которые вводят одновременно во время первой фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно. Первая и вторая медицинские жидкости, которые одновременно вводят во время протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно, могут быть любого подходящего типа (например, контрастной средой, солевым раствором).
Первый и второй цвета можно применять в данном многоцветном графическом изображении. Первый цвет может быть связан с количеством первой медицинской жидкости, вводимой во время фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно, и в соответствии со значением концентрации или со значением запрограммированной переменной концентрации. Второй цвет может быть связан с количеством второй медицинской жидкости, вводимой во время фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно, и в соответствии со значением концентрации или со значением запрограммированной переменной концентрации.
Количество первого цвета, включенного в данное многоцветное графическое изображение, может быть пропорционально количеству первой медицинской жидкости, вводимой во время фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно (например, в соответствии со значением концентрации или со значением запрограммированной переменной концентрации). Количество второго цвета, включенного в данное многоцветное графическое изображение, может быть пропорционально количеству второй медицинской жидкости, вводимой во время фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно (например, в соответствии со значением концентрации или со значением запрограммированной переменной концентрации).
Количество первого цвета, включенного в данное многоцветное графическое изображение, может увеличиваться с повышением амплитуды значения концентрации или значения запрограммированной переменной концентрации, в то время как количество второго цвета, включенного в данное многоцветное графическое изображение, может снижаться с повышением амплитуды значения концентрации или значения запрограммированной переменной концентрации. Количество первого цвета, включенного в данное многоцветное графическое изображение, может уменьшаться со снижением амплитуды значения концентрации или значения запрограммированной переменной концентрации, в то время как количество второго цвета, включенного в данное многоцветное графическое изображение, может повышаться со снижением амплитуды значения концентрации или значения запрограммированной переменной концентрации.
Количество цветов в данном многоцветном графическом изображении может передавать концентрацию первой медицинской жидкости относительно второй медицинской жидкости для фазы протокола инъекции, где приводные механизмы поршней первого и второго шприцев работают одновременно. Рассмотрим случай первого многоцветного графического изображения. Это первое многоцветное графическое изображение может передавать информацию о концентрации на основе количеств множества цветов, включенных в такое многоцветное графическое изображение, но первое многоцветное графическое изображение может также количественно отображать информацию о концентрации. На дисплее может быть одновременно представлено более чем одно многоцветное изображение, и передавать ту же самую информацию о концентрации. Каждое многоцветное графическое изображение, иное, чем отмеченное первое многоцветное графическое изображение, может количественно передавать информацию о других параметрах (т.е. иных, чем концентрация), связанных с работой системы инъекции медицинской жидкости. Например, данное многоцветное графическое изображение для конкретной фазы может количественно передавать информацию о скорости потока, общем объеме инъекции, и о том, какой из приводных механизмов поршней первого и второго шприцев работает. Каждое многоцветное графическое изображение, одновременно представленное по меньшей мере на одном дисплее, может обеспечивать ту же самую информацию о концентрации через относительное количество множества цветов, и каждое такое многоцветное графическое изображение может также количественно передавать информацию о различных параметрах, связанных с работой системы инъекции медицинской жидкости.
Седьмой аспект настоящего изобретения направлен на обеспечение контроля того, отображаются ли одно или оба из графического изображения задержки инъекции до графического изображения задержки сканирования для оператора системы инъекции медицинской жидкости. «Задержку инъекции» можно характеризовать как замедление (обычно, в секундах) от времени начала инъекции оператором, до действительного начала инъекции, как описано протоколом запрограммированной инъекции. «Задержку сканирования» можно охарактеризовать как замедление (обычно в секундах) от времени начала инъекции оператором до начала операций получения изображения устройством для получения изображения. В любом случае, седьмой аспект может быть представлен в виде системы инъекции медицинской жидкости, которая включает по меньшей мере один приводной механизм поршня шприца, по меньшей мере один дисплей, по меньшей мере одно устройство для ввода данных, и по меньшей мере один экран, представленный на по меньшей мере одном дисплее системы, обеспечивающем возможность видеть, представлено или нет графическое изображение задержки инъекции, графическое изображение задержки сканирования, или то и другое, на по меньшей мере одном дисплее, при программировании протокола инъекции для инжектора медицинской жидкости, при выполнения протокола инъекции, или во время того и другого. Седьмой аспект может также быть представлен в виде способа управления системой инъекции медицинской жидкости, где экран представлен на по меньшей мере одном дисплее системы инъекции медицинской жидкости, позволяющей пользователю выбрать, представлять или нет графическое изображение задержки инъекции, графическое изображение задержки сканирования, или то и другое, на по меньшей мере одном дисплее системы инъекции медицинской жидкости при программировании протокола инъекции, при выполнении протокола инъекции, или во время того и другого. Графическое изображение задержки инъекции можно применять для программирования задержки инъекции в протоколе инъекции, для отображения запрограммированной задержки инъекции, или того и другого. Графическое изображение задержки сканирования можно использовать для программирования задержки сканирования в протоколе инъекции, для отображения запрограммированной задержки сканирования, или того и другого.
Ряд усовершенствований признаков и дополнительных признаков применимы по отдельности к каждому из вышеупомянутых первого, второго, третьего, четвертого, пятого, шестого и седьмого аспектов настоящего изобретения. Эти усовершенствования признаков и дополнительные признаки могут применяться по отдельности или в любой комбинации, в связи с каждым из вышеупомянутых первого, второго, третьего, четвертого, пятого, шестого и седьмого аспектов.
В настоящем изобретении может использоваться один или несколько дисплеев. Данный дисплей может быть расположен в любом подходящем участке (например, внутри/снаружи комплекта для визуализации). Множество дисплеев могут применяться и располагаться в любом подходящем участке (например, встроенном в удаленную консоль расположенную вне комплекта визуализации; встроенном в силовую насадку автоматического шприца, расположенного внутри комплекта визуализации; встроенном в общую консоль для сканера и автоматического шприца, расположенного в комплекте визуализации).
В настоящем изобретении может использоваться одно или несколько устройств для ввода данных любого подходящего типа. Каждое такое устройство для ввода данных может располагаться в любом подходящем участке (например, вне комплекта визуализации, внутри комплекта визуализации). Каждое такое устройство для ввода данных может быть связано с любым подходящим компонентом или комбинацией компонентов (например, удаленной консолью, связанной с автоматическим шприцем; с силовой насадкой автоматического инжектора; с общей консолью для сканера и автоматического шприца).
Любой автоматический инжектор, который можно применять для обеспечения введения жидкости, может иметь любой подходящий размер, форму, конфигурацию и/или тип. С любым таким автоматическим инжектором может применяться один или несколько приводных механизмов поршня шприца любого подходящего размера, формы, конфигурации, и/или типа, где каждый такой приводной механизм поршня шприца способен по меньшей мере к двунаправленному движению (например, движению в первом направлении для выпуска жидкости; движению во втором направлении для осуществления загрузки и/или высасывания жидкости, и/или для возврата в положение для последующей операции выпуска жидкости), и где каждый такой приводной механизм поршня шприца может взаимодействовать с соответствующим поршнем шприца любым подходящим образом (например, посредством механического контакта; посредством подходящего сцепления (механического или иного)), так чтобы быть способным к продвижению поршня шприца по меньшей мере в одном направлении (например, для выпуска жидкости). В каждом приводном механизме поршня шприца может применяться один или несколько источников управления любого подходящего размера, формы, конфигурации, и/или типа. Множество выводов источников управления может быть объединено любым подходящим образом для продвижения поршня одного шприца в определенное время. Один или несколько источников управления могут быть предназначены для приводного механизма поршня одного шприца, один или несколько источников управления могут быть связаны с множеством приводных механизмов поршней шприцев (например, включая передачу своего рода для изменения выпуска от поршня одного шприца к поршню другого шприца), или их комбинацией. Примеры форм источников управления включают щеточный или бесщеточный электрический мотор, гидравлический мотор, пневматический мотор, пьезоэлектрический мотор, или шаговый мотор.
Любой такой автоматический инжектор можно применять для любого подходящего приложения, где необходима доставка одной или нескольких медицинских жидкостей, включая любое подходящее приложение медицинской визуализации (например, компьютерную томографию или КТ визуализацию; магнитно-резонансную визуализацию или МРТ; однофотонную эмиссионную компьютерную томографию или SPECT визуализацию; позитронную эмиссионную томографию или ПЭТ визуализацию; рентгеновскую визуализацию; ангиографическую визуализацию; оптическую визуализацию; ультразвуковую визуализацию) и/или любое подходящее медицинское диагностическое и/или терапевтическое приложение (например, введение средств для химиотерапии, контроль боли, и т.д.), но не ограничиваются ими. Любой такой автоматический инжектор может применяться в сочетании с любым компонентом или комбинацией компонентов, таким как подходящая система визуализации (например, КТ сканер). Например, информация может передаваться между таким автоматическим инжектором и одним или несколькими другими компонентами (например, информация о задержке сканирования, сигнал о начале введения, скорость инъекции).
Любое подходящее число шприцев может применяться с таким автоматическим инжектором любым подходящим образом (например, с возможностью отсоединения; при передней загрузке; при задней загрузке; при боковой загрузке), любую подходящую медицинскую жидкость можно выпускать из данного шприца в любом таком автоматическом инжекторе (например, контрастную среду, терапевтическую жидкость, радиофармацевтическое средство, солевой раствор и любую их комбинацию), и любую подходящую жидкость можно выпускать из автоматического инжектора с конфигурацией с множеством шприцев любым подходящим образом (например, последовательно, одновременно), или с их комбинацией. В одном варианте осуществления жидкость, выпускаемая из шприца с помощью автоматического инжектора, направляется в трубопровод (например, комплект медицинских трубок), где этот трубопровод гидравлически сообщается со шприцем любым подходящим образом и направляет жидкость в необходимый участок (например, в катетер, введенный пациенту для инъекции). Множество шприцев может выпускать жидкость в общий трубопровод (например, для проведения к единственному участку инъекции), или один шприц может выпускать жидкость в один трубопровод (например, для проведения к одному участку инъекции), в то время как другой шприц может выпускать жидкость в другой трубопровод (например, для обеспечения другого участка инъекции). В одном варианте осуществления каждый шприц включает цилиндр шприца и поршень, который располагается внутри и передвигается относительно цилиндра шприца. Этот поршень может сопрягаться с приводным механизмом поршня шприца автоматического инжектора, так что приводной механизм может продвигать поршень в по меньшей мере одном направлении, и по возможности в двух разных, противоположных направлениях.
Любая «логическая схема» может применяться в любом из различных аспектов настоящего изобретения любым подходящим образом, включая, без каких-либо ограничений, любое подходящее программное обеспечение, программно-аппаратные средства, или аппаратное обеспечение, с применением одной или нескольких платформ, с применением одного или нескольких процессоров, с применением памяти любого подходящего типа, с применением любого отдельного компьютера любого подходящего типа или множества компьютеров любого подходящего типа, и соединенных любым подходящим образом, или любую их комбинацию. Эта логическая схема может применяться в любом единичном участке или во множестве участков, соединенных любым подходящим образом (например, через любой тип сети).
Любой признак настоящего изобретения, который, как предполагается, ограничен контекстом единственного числа или тому подобным, ясно обозначен в настоящем описании такими терминами, как «только», «единственный», «ограничен», или тому подобными. Простое введение признака в соответствии с общепринятой предшествующей основной практикой не ограничивает соответствующий признак единственной формой (например, указание на то, что автоматический инжектор включает «шприц», не означает, что автоматический инжектор включает только один шприц). Далее, любое отсутствие такой фразы, как «по меньшей мере один» также не ограничивает соответствующий признак формой единственного числа (например, указание на то, что автоматический инжектор включает «шприц», не означает, что автоматический инжектор включает только один шприц). Применение фразы «по меньшей мере как правило» или тому подобной в связи с конкретным признаком охватывает соответствующую характеристику и ее варианты, которые можно представить (например, указание на то, что цилиндр шприца является по меньшей мере как правило цилиндрическим, охватывает то, что цилиндр шприца является цилиндрическим). Наконец, ссылка на признак в сочетании с фразой «в одном варианте осуществления» не ограничивает применение признака одним вариантом осуществления.
Краткое описание фигур
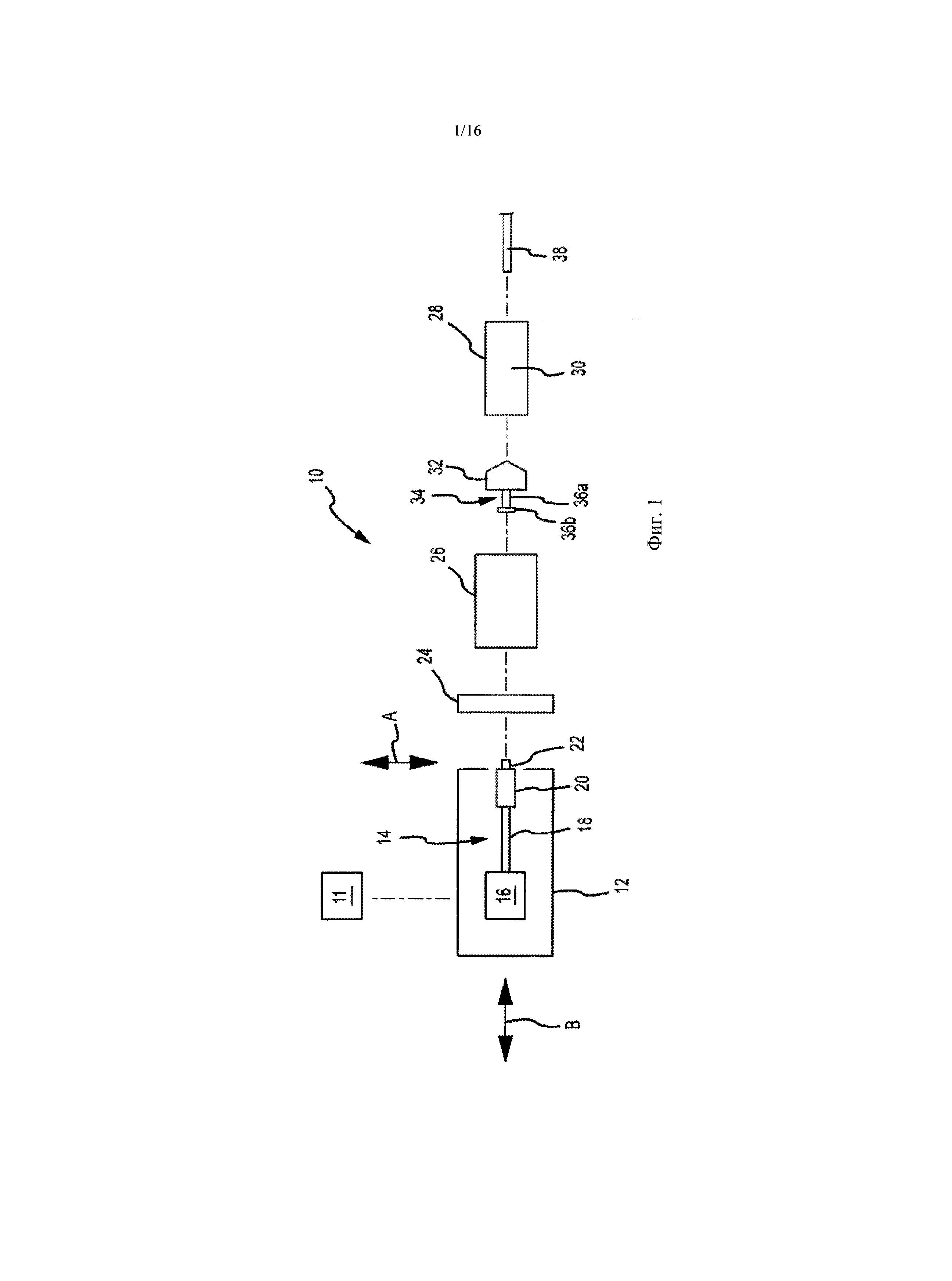
Фигура 1 является схематическим вариантом осуществления автоматического инжектора.
Фигура 2A является изображением в перспективе варианта осуществления портативного, установленного на подставке автоматического инжектора с двойной головкой.
Фигура 2B является увеличенным, отчасти покомпонентным изображением силовой насадки, используемой автоматическим инжектором, изображенным на Фигуре 2A.
Фигура 2С является схематическим изображением осуществления приводного механизма поршня шприца, используемого автоматическим инжектором, изображенным на Фигуре 2A.
Фигура 3A является схематическим изображением осуществления комплекта для визуализации, использующего систему инъекции медицинской жидкости и систему визуализации.
Фигура 3B является схематическим изображением системы инъекции медицинской жидкости с двойной головкой, которая может применяться для одновременной инъекции двух медицинских жидкостей.
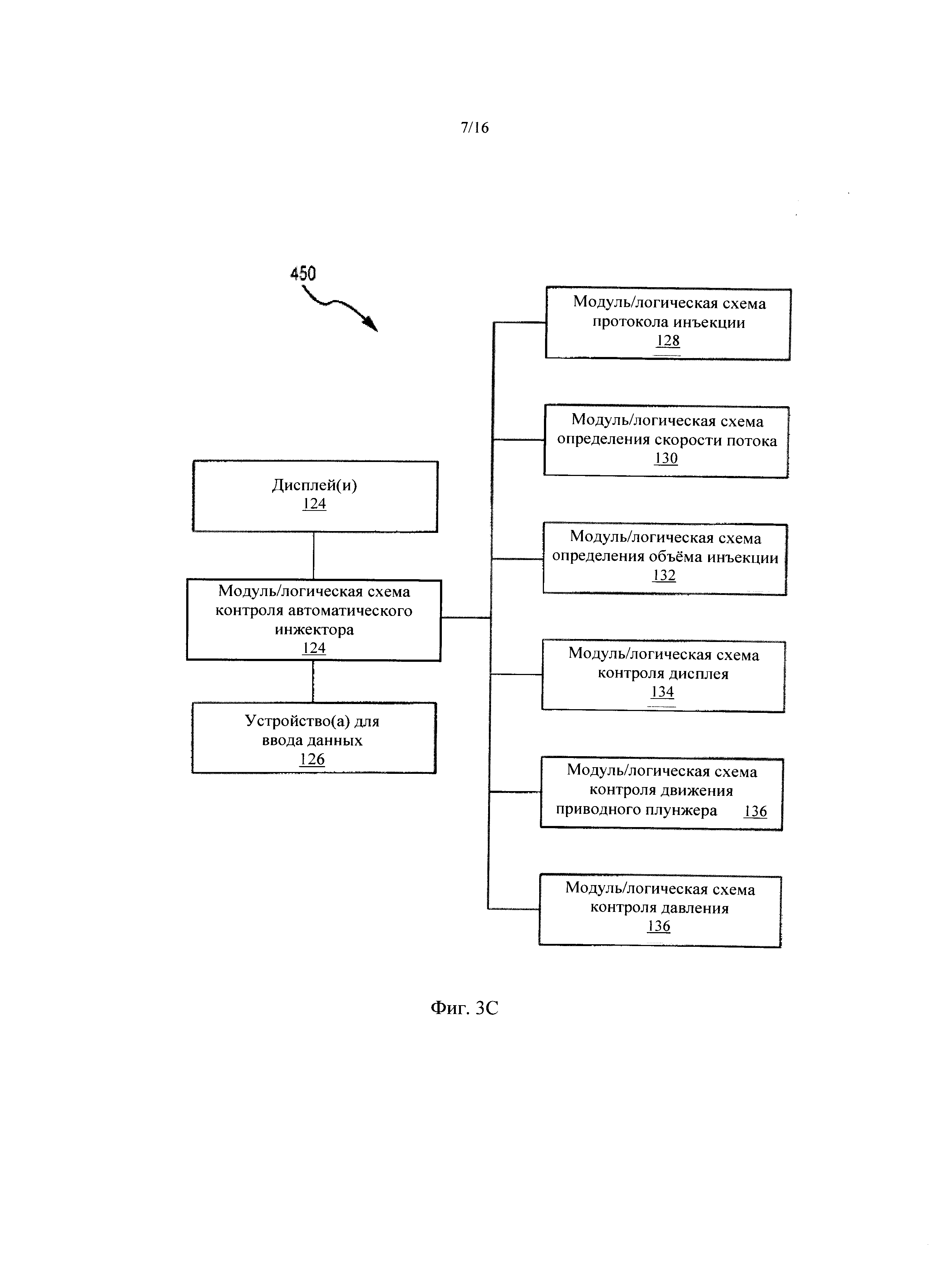
Фигура 3C является схематическим изображением осуществления модуля/логической схемы контроля автоматического инжектора, которые могут использоваться системой инъекции медицинской жидкости, изображенной на Фигуре 3B.
Фигура 4 является схематическим изображением осуществления протокола настройки инъекции, который может применяться системой инъекции медицинской жидкости.
Фигура 5 является схематическим изображением осуществления протокола определения скорости потока, который может применяться системой инъекции медицинской жидкости.
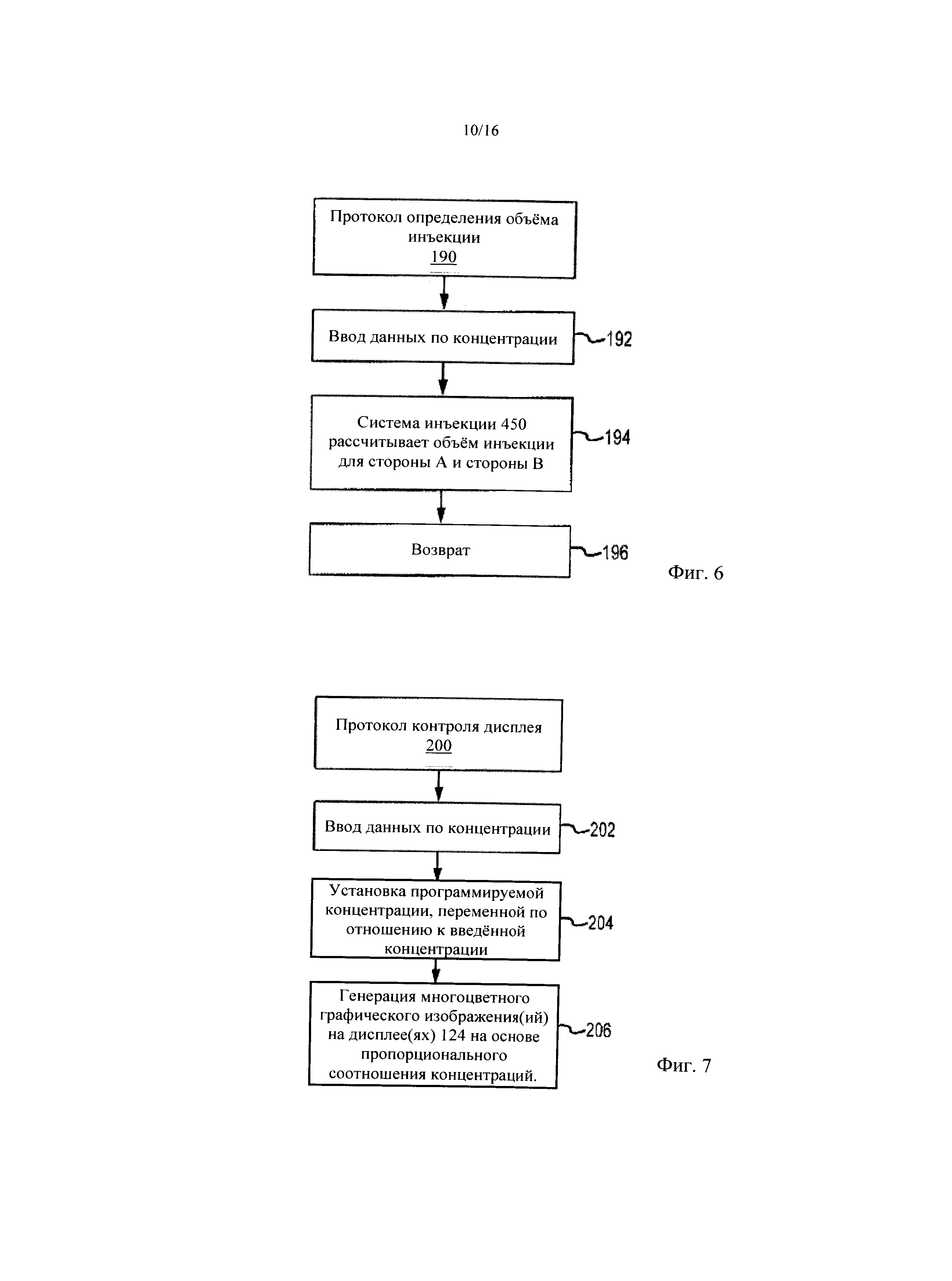
Фигура 6 является схематическим изображением осуществления протокола определения объема инъекции, который может применяться системой инъекции медицинской жидкости.
Фигура 7 является схематическим изображением осуществления протокола контроля дисплея, который может применяться системой инъекции медицинской жидкости.
Фигура 8 является схематическим изображением осуществления протокола контроля движения приводного плунжера, который может применяться системой инъекции медицинской жидкости.
Фигура 9 является схематическим изображением осуществления протокола контроля давления, который может применяться системой инъекции медицинской жидкости.
Фигура 10 является осуществлением экрана из системы инъекции медицинской жидкости по время программирования протокола инъекции.
Фигура 11 является осуществлением экрана из системы инъекции медицинской жидкости после завершения программирования протокола инъекции.
Фигура 12 является осуществлением экрана из системы инъекции медицинской жидкости после завершения программирования протокола инъекции, в которой применяется многоцветное графическое изображение для передачи концентрации 70/30 для одной фазы протокола инъекции.
Фигура 13 является осуществлением экрана из системы инъекции медицинской жидкости после завершения программирования протокола инъекции, в которой применяется многоцветное графическое изображение для передачи концентрации 30/70 для одной фазы протокола инъекции.
Подробное описание
На Фигуре 1 представлено схематическое изображение одного варианта осуществления автоматического инжектора 10, содержащего силовую насадку 12. Один или несколько графических программных интерфейсов или ГПИ 11 могут быть связаны с силовой насадкой 12. Каждый ГПИ 11: 1) может быть любого подходящего размера, формы, конфигурации и/или типа; 2) может быть функционально соединен с силовой насадкой 12 любым подходящим образом; 3) может быть расположен в любом подходящем участке; 4) может быть сконструирован для обеспечения любой из следующих функций: контроль одного или нескольких аспектов работы автоматического инжектора 10; ввод/редактирование одного или нескольких параметров, связанных с работой автоматического инжектора 10; и отображение подходящей информации (например, связанной с работой автоматического инжектора 10); или 5) любой комбинации вышеизложенного. Может применяться любое подходящее число ГПИ 11. В одном варианте осуществления автоматический инжектор 10 содержит ГПИ 11, встроенный посредством консоли, который отделен от силовой насадкой 12, но сообщается с ней. В другом варианте осуществления автоматический инжектор 10 включает ГПИ 11, являющийся частью силовой насадки 12. В еще одном варианте осуществления в автоматическом инжекторе 10 используется один ГПИ 11 на отдельной консоли, сообщающийся с силовой насадкой 12 (например, на удаленной консоли; на консоли, общей для автоматического инжектора 12 и устройства для визуализации), а также применяет другой ГПИ 11, находящийся на силовой насадке 12. Каждый ГПИ 11 может обеспечивать ту же самую функцию или комплект функцией, или ГПИ 11 могут отличаться в по меньшей мере чем-то одном в отношении их функции.
Шприц 28 может быть установлен на силовую насадку 12, и будучи установленным, может считаться частью автоматического инжектора 10. Некоторые процедуры инъекции могут привести к созданию относительно высокого давления в шприце 28. В связи с этим может быть необходимо расположить шприц 28 внутри кожуха для защиты от давления 26. Кожух для защиты от давления 26 обычно связан с силовой насадкой 12 таким образом, чтобы обеспечить размещение шприца 28 как части силовой насадки 12 или устанавливается после установки шприца 28 на силовой насадке 12. Тот же самый кожух для защиты от давления 26 обычно остается связанным с силовой насадкой 12, когда различные шприцы 28 располагаются внутри или удаляются из кожуха для защиты от давления 26 для множества процедур инъекции. Автоматический инжектор 10 может не содержать кожух для защиты от давления 26, если автоматический инжектор сконструирован/используется для инъекций под низким давлением, и/или если шприц(ы) 28, применяемый(е) с автоматическим инжектором 10, имеет достаточную жесткость, чтобы выдерживать инъекции под высоким давлением без дополнительной поддержки, обеспечиваемой кожухом для защиты от давления 26. В любом случае, жидкость, выпускаемая из шприца 28, может быть направлена в трубопровод 38 любого подходящего размера, формы, конфигурации, и/или типа, который может быть гидравлически соединен со шприцем 28 любым подходящим образом, и который может направлять жидкость в любой подходящий участок (например, у пациента).
Силовая насадка 12 включает приводной механизм поршня шприца или привод поршня шприца 14, взаимодействующий (например, граничащий) со шприцем 28 (например, его поршнем 32) для выпуска жидкости из шприца 28. Этот приводной механизм поршня шприца 14 включает источник управления 16 (например, мотор любого подходящего размера, формы, конфигурации, и/или типа, факультативную зубчатую передачу, и тому подобное), приводящий в действие направляющий выпуск 18. Плунжер 20 может содержать соединитель 22 для взаимодействия или сопряжения с соответствующей частью шприца 28 таким образом, как обсуждается ниже.
Шприц 28 содержит поршень или плунжер 32, который подвижно расположен в цилиндре шприца 30 (например, для аксиального возвратно-поступательного движения по оси, совмещенной с двунаправленной стрелкой В). Поршень 32 может включать соединитель 34. Этот соединитель поршня шприца 34 может взаимодействовать или сопрягаться со соединителем плунжера 22 для обеспечения втягивания приводным механизмом поршня шприца 14 поршня шприца 32 в цилиндре шприца 30. Соединитель поршня шприца 34 может быть в форме стержня 36a, который проходит от корпуса поршня шприца 32, вместе с головкой или кнопкой 36b. Однако, соединитель поршня шприца 34 может быть любого подходящего размера, формы, конфигурации и/или типа.
Как правило, приводной механизм поршня шприца 14 автоматического инжектора 10 может взаимодействовать с поршнем шприца 32 из шприца 28 любым подходящим образом (например, посредством механического контакта, посредством подходящего сцепления (механического или иного)), так чтобы обеспечить перемещение или продвижение поршня шприца 32 (относительно цилиндра шприца 30) по меньшей мере в одном направлении (например, для выпуска жидкости из соответствующего шприца 28). То есть, хотя приводной механизм поршня шприца 14 способен к двунаправленному движению (например, посредством приведения в действие того же самого источника управления 16), автоматический инжектор 10 может быть сконструирован так, чтобы манипуляция приводным механизмом поршня шприца 14 в действительности только обеспечивала продвижение поршня каждого шприца 32, используемого автоматическим инжектором 10, только в одном направлении. Однако, приводной механизм поршня шприца 14 может быть сконструирован для взаимодействия с поршнем 32 каждого шприца, используемого автоматическим инжектором 10, так чтобы обеспечить движение поршня 32 каждого шприца в двух различных направлениях (например, в различных направлениях по главной оси).
Втягивание поршня шприца 32 может применяться для осуществления загрузки жидкости в цилиндр шприца 30 для последующей инъекции или выпуска, может применяться для действительного всасывания жидкости в цилиндр 30 для последующей инъекции или выпуска, или для любой другой подходящей цели. Некоторые конфигурации могут не требовать, чтобы приводной механизм поршня шприца 14 мог втягивать поршень шприца 32, и в этом случае соединитель плунжера 22 и соединитель поршня шприца 34 могут не требоваться. В этом случае приводной механизм поршня шприца 14 может быть втянут с целью выполнения другой операции доставки жидкости (например, после установки другого предварительно заполненного шприца 28). Даже когда применяются соединитель плунжера 22 и соединитель поршня шприца 34, эти компоненты могут быть сцеплены или не сцеплены, когда плунжер 20 продвигает поршень шприца 32 для выпуска жидкости из шприца 28 (например, плунжер 20 может просто «надавливать» на соединитель поршня шприца 34 или прямо на проксимальный конец поршня шприца 32). Любое отдельное движение или комбинация движений в любом подходящем направлении или комбинации направлений может применяться для расположения соединителя плунжера 22 и соединителя поршня шприца 34 в связанном состоянии или положении, для расположения соединителя плунжера 22 и соединителя поршня шприца 34 в не связанном состоянии или положении, или то и другое.
Шприц 28 может быть установлен на силовую насадку 12 любым подходящим образом. Например, шприц 28 может быть сконструирован для установки непосредственно на силовую насадку 12. В проиллюстрированном варианте осуществления кожух 24 установлен подходящим образом на силовую насадку 12 для обеспечения сопряжения между шприцем 28 и силовой насадкой 12. Этот кожух 24 может быть выполнен в виде адаптера, на который можно установить шприцы 28 одной или нескольких конфигураций, где по меньшей мере одну конфигурацию шприца 28 можно установить прямо на силовую насадку 12 без применения любого такого адаптера. Кожух 24 может также быть выполнен в виде лицевой панели, на которую можно установить шприцы 28 одной или нескольких конфигураций. В этом случае может быть так, что лицевая панель требуется для установки шприца 28 на силовую насадку 12 -шприц 28 нельзя установить на силовую насадку 12 без лицевой панели. Когда применяют кожух для защиты от давления 26, он может быть установлен на силовую насадку 12 различным образом, как обсуждалось по отношению к шприцу 28, и шприц 28 далее установлен в кожух для защиты от давления 26.
При установке шприца 28 кожух 24 может быть установлен на силовую насадку 12 и может оставаться в фиксированном положении относительно нее. Другим вариантом является подвижное соединение кожуха 24 и силовой насадки 12 для приспособления к установке шприца 28. Например, кожух 24 может передвигаться в плоскости, содержащей двунаправленную стрелку A, для обеспечения одного или нескольких связанных состояний или положений, и несвязанных состояний или положений между соединителем плунжера 22 и соединителем поршня шприца 34.
Одна частная конфигурация автоматического инжектора показана на Фигуре 2A, обозначена справочным номером 40, и по меньшей мере частично соответствует автоматическому инжектору 10, изображенному на Фигуре 1. Автоматический инжектор 40 включает для автоматического инжектора 40 силовую насадку 50, установленную на портативную стойку 48. Два шприца 86a, 86b для автоматического инжектора 40 установлены на силовую насадку 50. Жидкость может быть выпущена из шприцев 86a, 86b при работе автоматического инжектора 40.
Портативная стойка 48 может быть любого подходящего размера, формы, конфигурации, и/или типа. Колеса, валики, шарниры или тому подобное можно применять, чтобы сделать стойку 48 портативной. Силовая насадка 50 может поддерживаться в фиксированном положении относительно портативной стойки 48. Однако может быть необходимо обеспечить расположение силовой насадки 50 регулируемым относительно портативной стойки 48 по меньшей мере некоторым образом. Например, может быть необходимо держать силовую насадку 50 в одном положении относительно портативной стойки 48 при загрузке жидкости в один или несколько шприцев 86a, 86b, и держать силовую насадку 50 в другом положении относительно портативной стойки 48 для проведения процедуры инъекции. В связи с этим, силовая насадка 50 может быть подвижно соединена с портативной стойкой 48 любым подходящим образом (например так, чтобы силовая насадка 50 могла поворачиваться по меньшей мере в определенном диапазоне движения, а затем поддерживалась в необходимом положении).
Необходимо понимать, что силовая насадка 50 может поддерживаться любым подходящим образом для подачи жидкости. Например, вместо установки на портативной структуре, силовая насадка 50 может соединяться с поддерживающим блоком, который в свою очередь устанавливают на подходящую структуру (например, потолок, стену, пол). Любой поддерживающий блок для силовой насадки 50 может регулироваться с возможностью перемещения по меньшей мере в некоторой степени (например, за счет одной или нескольких поддерживающих секций, которые могут перемещаться относительно одной или нескольких других поддерживающих секций), или может сохраняться в устойчивом положении. Далее, силовая насадка 50 может быть интегрирована с любым таким поддерживающим блоком так, чтобы либо сохраняться в фиксированном положении, либо регулироваться относительно поддерживающего блока.
Силовая насадка 50 содержит графический пользовательский интерфейс или ГПИ 52. Этот ГПИ 52 может быть сконструирован для обеспечения одной или любой комбинации из следующих функций: контроля одного или нескольких аспектов работы автоматического инжектора 40; ввода/редактирования одного или нескольких параметров, связанных с работой автоматического инжектора 40; и отображения соответствующей информации (например, связанной с работой автоматического инжектора 40). Автоматический инжектор 40 также может содержать консоль 42 и блок питания 46, каждый из которых может сообщаться с силовой насадкой 50 любым подходящим образом (например, через один или несколько кабелей), которые могут размещаться на столе или быть установлены на подставку для электроники в кабинете осмотра или любом другом подходящем участке, или и в том, и в другом. Блок питания 46 может содержать одно или несколько из следующего, и в любой подходящей комбинации: источник питания для инжектора 40; схему интерфейса для обеспечения сообщения между консолью 42 и силовой насадкой 50; контур для обеспечения соединения автоматического инжектора 40 с удаленными блоками, такими как удаленные консоли, удаленными ручными или ножными контрольными переключателями, или другими средствами удаленного контроля изготовителей комплектного оборудования (OEM) (например, для обеспечения синхронизации приведения в действие автоматического инжектора 40 с воздействием рентгеновского излучения системы визуализации); и любыми другими подходящими компонентами. Консоль 42 может содержать сенсорный дисплей 44, который в свою очередь может выполнять одну или несколько из следующих функций в любой подходящей комбинации: обеспечение для оператора удаленного контроля одного или нескольких аспектов работы автоматического инжектора 40; обеспечение для оператора ввода/редактирования одного или нескольких параметров, связанных с работой автоматического инжектора 40; обеспечение для оператора определения и хранения программ для автоматической работы автоматического инжектора 40 (которые могут впоследствии автоматически выполняться автоматическим инжектором 40 при инициации оператором); и отображение любой подходящей информации, относящейся к автоматическому инжектору 40, и включающей любой аспект его работы.
Различные подробности, касающиеся интеграции шприцев 86a, 86b с силовой насадкой 50, представлены на Фигуре 2 В. Каждый из шприцев 86a, 86b содержит одни и те же общие компоненты. Шприц 86a содержит поршень или плунжер 90a, который располагается с возможностью перемещения в цилиндре шприца 88a. Передвижение поршня 90a по оси 100a (Фигура 2A) при работе силовой насадки 50 выпускает жидкость из цилиндра 88a через наконечник 89a шприца 86a. Подходящий трубопровод (не показан) обычно будет располагаться в гидравлическом соединении с наконечником 89a любым подходящим образом для направления жидкости в необходимый участок (например, пациенту). Подобным образом, шприц 86b содержит поршень или плунжер 90b, который располагается с возможностью перемещения в цилиндре шприца 88b. Передвижение поршня 90b по оси 100b (Фигура 2A) при работе силовой насадки 50 выпускает жидкость из цилиндра 88b через наконечник 89b шприца 86b. Подходящий трубопровод (не показан) обычно располагается в гидравлическом соединении с наконечником 89b любым подходящим образом для направления жидкости в необходимый участок (например, пациенту).
Шприц 86a соединен с силовой насадкой 50 через промежуточную лицевую панель 102a. Эта лицевая панель 102a содержит раму 104, поддерживающую по меньшей мере часть цилиндра шприца 88a, которая может обеспечить/выполнить любую дополнительную функцию или комбинацию функций. Опора 82a располагается на силовой насадке 50 и зафиксирована относительно нее, для сопряжения с лицевой панелью 102a. Соединитель плунжера 76 от плунжера 74 (Фигура 2C), каждый из которых является частью приводного механизма поршня шприца или приводного механизма поршня шприца 56 (Фигура 2C) для шприца 86a, располагаются рядом с лицевой панелью 102a при установке на силовую насадку 50. Подробности, касающиеся приводного механизма поршня шприца 56, более детально обсуждаются ниже по отношению к Фигуре 2C. В целом, соединитель плунжера 76 может сцепляться с поршнем шприца 90a для шприца 86a, и соединитель плунжера 76 и плунжер 74 (Фигура 2C) могут затем передвигаться относительно силовой насадки 50 для перемещения поршня шприца 90a по оси 100a (Фигура 2A). Может быть так, что соединитель плунжера соприкасается, но в действительности не сцепляется с поршнем шприца 90a при продвижении поршня шприца 90a для выпуска жидкости через наконечник 89a шприца 86a.
Лицевая панель 102a может перемещаться по меньшей мере в целом в плоскости, перпендикулярной к осям 100a, 100b (связанным с движением поршней шприцев 90a, 90b, соответственно, и показанным на Фигуре 2A), как для установки лицевой панели 102a, так и для удаления лицевой панели 102a с ее опоры 82a на силовой насадке 50. Лицевую панель 102a можно применять для сцепления поршня шприца 90a с ее соответствующим соединителем плунжера 76 на силовой насадке 50. В связи с этим, лицевая панель 102a содержит пару ручек 106a. В целом и со шприцем 86a, расположенным исходно внутри лицевой панели 102a, ручки 106a можно передвинуть для того, чтобы в свою очередь передвинуть/переместить шприц 86a по меньшей мере в целом в плоскости, перпендикулярной к осям 100a, 100b (связанным с движением поршней шприцев 90a, 90b, соответственно, и показанным на Фигуре 2A). Передвижение ручек 106a в одно положение передвигает/перемещает шприц 86a (относительно лицевой панели 102a) по меньшей мере в направлении в целом вниз, для сцепления поршня шприца 90a с соответствующей соединителем плунжера 76. Перемещение ручек 106a в другое положение перемещает/перемещает шприц 86a (относительно лицевой панели 102a) по меньшей мере в целом в направлении вверх для расцепления поршня шприца 90a от соответствующего соединителя плунжера 76.
Шприц 86b соединен с силовой насадкой 50 через промежуточную лицевую панель 102b. Опора 82b располагается на силовой насадке 50 и зафиксирована относительно нее для сопряжения с лицевой панелью 102b. Соединитель плунжера 76 для плунжера 74 (Фигура 2C), каждый из которых является частью приводного механизма поршня шприца 56 для шприца 86b, располагается рядом с лицевой панелью 102b при установке на силовую насадку 50. Подробности, касающиеся приводного механизма поршня шприца 56, более детально обсуждаются ниже по отношению к Фигуре 2C. Как правило, соединитель плунжера 76 может сцепляться с поршнем шприца 90b от шприца 86b, и соединитель плунжера 76 и плунжер 74 (Фигура 2C) могут затем передвигаться относительно силовой насадки 50 для перемещения поршня шприца 90b по оси 100b (Фигура 2A). Может быть так, что соединитель плунжера соприкасается, но в действительности не сцепляется с поршнем шприца 90b при продвижении поршня шприца 90b для выпуска жидкости через наконечник 89b шприца 86b.
Лицевая панель 102b может перемещаться по меньшей мере в целом в плоскости, перпендикулярной к осям 100a, 100b (связанным с движением поршней шприцев 90a, 90b, соответственно, и показанным на Фигуре 2A), как для установки лицевой панели 102b, так и для удаления лицевой панели 102b с ее опоры 82b на силовой насадке 50. Лицевая панель 102b может применяться также для сцепления поршня шприца 90b с ее соответствующим соединителем плунжера 76 на силовой насадке 50. В связи с этим, лицевая панель 102b может содержать ручку 106b. В целом и со шприцем 86b, расположенным исходно внутри лицевой панели 102b, шприц 86b может вращаться вокруг его длинной оси 100b (Фигура 2A) и относительно лицевой панели 102b. Это вращение можно реализовать путем передвижения ручки 106b, путем захвата и поворота шприца 86b, или того и другого. В любом случае, это вращение передвигает/перемещает шприц 86b и лицевую панель 102b по меньшей мере в целом в плоскости, перпендикулярной осям 100a, 100b (связанным с движением поршней шприцев 90a, 90b, соответственно, и показанным на Фигуре 2A). Вращение шприца 86b в одном направлении передвигает/перемещает шприц 86b и лицевую панель 102b в направлении по меньшей мере в целом вниз, для сцепления поршня шприца 90b с соответствующим соединителем плунжера 76. Вращение шприца 86b в противоположном направлении передвигает/перемещает шприц 86b и лицевую панель 102b в направлении по меньшей мере в целом вверх, для расцепления поршня шприца 90b и соответствующего соединителя плунжера 76.
Как показано на Фигуре 2B, поршень шприца 90b включает корпус поршня 92 и соединитель поршня шприца 94. Эта соединитель поршня шприца 94 содержит стержень 98 и проходит от корпуса поршня 92, вместе с головкой 96, которая отделена от корпуса поршня 92. Каждый из соединителей плунжера 76 содержит большую прорезь, которая расположена за малой прорезью на лицевой стороне соединителя плунжера 76. Головка 96 соединителя поршня шприца 94 может располагаться внутри большой прорези соединителя плунжера 76, а стержень 98 соединителя поршня шприца 94 может проходить через малую прорезь на лицевой стороне соединителя плунжера 76, когда поршень шприца 90b и его соответствующая соединитель плунжера 76 находятся в сцепленном состоянии или положении. Поршень шприца 90a может включать подобный соединитель поршня шприца 94 для сопряжения с соответствующей соединителем плунжера 76.
Силовую насадку 50 применяют, чтобы выпустить жидкость из шприцев 86a, 86b в случае с автоматическим инжектором 40. То есть, силовая насадка 50 обеспечивает движущую силу для выпуска жидкости из каждого из шприцев 86a, 86b. Один вариант ее осуществления можно охарактеризовать как приводной механизм поршня шприца или приводной механизм поршня шприца, как показано на Фигуре 2C, идентифицированный справочным номером 56, и он может применяться с использованием силовой насадки 50 для выпуска жидкости из каждого из шприцев 86a, 86b. Отдельный приводной механизм поршня шприца 56 может быть встроен в силовую насадку 50 для каждого из шприцев 86a, 86b. В связи с этим, и возвращаясь к Фигурам 2A-B, силовая насадка 50 может включать ручные кнопки 80a и 80b для применения для отдельного контроля каждого из приводных механизмов поршня шприца 56.
Исходно, и в связи с приводным механизмом поршня шприца 56 с Фигуры 2C, каждый из его индивидуальных компонентов может иметь любой подходящий размер, форму, конфигурацию и/или тип. Приводной механизм поршня шприца 56 включает источник управления или мотор 58, который имеет выпускной стержень 60. Приводной механизм 62 установлен на выпускном стержне 60 мотора 58 и вращается с ним. Приводной механизм 62 сцеплен, или по меньшей мере способен сцепляться с ведомой шестерней 64. Эта ведомая шестерня 64 устанавливается на приводном винте или стержне 66 и вращается с ним. Ось, вокруг которой вращается приводной винт 66, обозначена справочным номером 68. Один или несколько подшипников 72 надлежащим образом поддерживают приводной винт 66.
Каретка или приводной плунжер 74 установлен на приводной винт 66 с возможностью перемещения. Обычно, вращение приводного винта 66 в одном направлении продвигает плунжер 74 по оси вдоль приводного винта 66 (и таким образом, вдоль оси 68) в направлении соответствующего шприца 86a/b, в то время как вращение приводного винта 66 в противоположном направлении продвигает по оси плунжер 74 вдоль приводного винта 66 (и таким образом, вдоль оси 68) в направлении от соответствующего шприца 86a/b. В связи с этим, периметр по меньшей мере части приводного винта 66 включает спиральную резьбу 70, которая сопрягается по меньшей мере с частью плунжера 74. Плунжер 74 также установлен с возможностью передвижения внутри соответствующего вкладыша 78, который не позволяет плунжеру 74 вращаться при вращении соответствующего приводного винта 66. Таким образом, вращение приводного винта 66 обеспечивает продвижение по оси плунжера 74 в направлении, определенном направлением вращения приводного винта 66.
Плунжер 74 содержит соединитель 76, который может быть сцеплен с возможностью отсоединения с соединителем поршня шприца 94 из поршня шприца 90a/b соответствующего шприца 86a/b. Когда соединитель плунжера 76 и соединитель поршня шприца 94 соединяются подходящим образом, то поршень шприца 90a/b передвигается вместе с плунжером 74. На Фигуре 2C показана конфигурация, где шприц 86a/b может передвигаться вдоль своей соответствующей оси 100a/b без сцепления с плунжером 74. Когда шприц 86a/b продвигают по соответствующей оси 100a/b так, что головка 96 поршня шприца 90a/b выравнивается со соединителем плунжера 76, но ось 68 находится в смещенной конфигурации на Фигуре 2c, шприц 86a/b может перемещаться в плоскости, перпендикулярной оси 68, по которой передвигается плунжер 74. Это устанавливает соединение между соединителем плунжера 76 и соединителем поршня шприца 96 вышеуказанным способом.
Каждый из автоматических инжекторов 10, 40 с Фигур 1 и 2A-C может применяться для любого подходящего приложения, включая приложения для медицинской визуализации, где жидкость вводят субъекту (например, пациенту) и/или для любого подходящего медицинского диагностического и/или терапевтического приложения (например, введения средств для химиотерапии, контроля боли, и т.д.), но не ограничиваясь ими. Примеры приложений для медицинской визуализации для автоматических инжекторов 10, 40 включают компьютерную томографию или КТ визуализацию, магнитно-резонансную визуализацию или МРТ, однофотонную эмиссионную компьютерную томографию или SPECT визуализацию, позитронную эмиссионную томографию или ПЭТ визуализацию, рентгеновскую визуализацию, ангиографическую визуализацию, оптическую визуализацию, и ультразвуковую визуализацию, но не ограничиваются ими. Каждый из автоматических инжекторов 10, 40 может применяться по отдельности или в сочетании с одним или несколькими другими компонентами. Каждый из автоматических инжекторов 10.40 может быть функционально соединен с одним или несколькими компонентами, например, так, чтобы информацию можно было передавать между автоматическим инжектором 10, 40 и одним или несколькими другими компонентами (например, информацию о задержке сканирования, сигнал о начале инъекции, скорость инъекции).
Любое число шприцев может применяться для каждого из автоматических инжекторов 10, 40, включая конфигурации с одной головкой (для одного шприца) и конфигурации с двумя головками (для двух шприцев), но не ограничиваясь ими. В случае конфигурации с множеством шприцев, каждый автоматический инжектор 10, 40 может выпускать жидкость из различных шприцев любым подходящим образом и в соответствии с любой временной последовательностью (например, последовательным выведением из двух или более шприцев, одновременным выведением из двух или более шприцев, и любой их комбинацией). Множество шприцев может выпускать жидкость в общий трубопровод (например, для проведения к единственному участку инъекции), или один шприц может выпускать жидкость в один трубопровод (например, для проведения к одному участку инъекции), в то время как другой шприц может выпускать жидкость в другой трубопровод (например, для проведения к другому участку инъекции). Каждый такой шприц, используемый каждым из автоматических инжекторов 10, 40, может содержать любую подходящую жидкость (например, медицинскую жидкость), например, контрастную среду, терапевтическую жидкость, радиофармацевтическое средство, солевой раствор, и любую их комбинацию. Каждый такой шприц, используемый каждым из автоматических инжекторов 10, 40, может быть установлен любым подходящим образом (например, могут применяться конфигурации с задней загрузкой; могут применяться конфигурации с передней загрузкой; могут применяться конфигурации с боковой загрузкой).
На Фигуре 3A схематически представлен один вариант осуществления того, что может быть охарактеризовано как комплект для визуализации 400. В иллюстрированном варианте осуществления комплект для визуализации 400 включает кабинет контроля 402 и кабинет визуализации 420, которые разделены подходящим барьером 412. Это разделение может быть необходимым не во всех случаях. В некоторых вариантах осуществления этот барьер может включать защиту от излучения (например, альфа, бета и/или гамма), защиту от ВЧ излучения, и/или любой другой тип материала, который позволяет снизить вероятность нежелательных условий, которые могут препятствовать получению изображения.
Комплект для визуализации 400 включает систему инъекции медицинской жидкости или контрастной среды 430. Система инъекции контрастной среды 430 включает автоматический инжектор 432 (например, автоматический инжектор 10; автоматический инжектор 40) и удаленную консоль 404. Автоматический инжектор 432 функционально соединяется с удаленной консолью 404, может быть функционально соединен с устройством визуализации 422 (обсуждаемым ниже), и гидравлически соединяется с пациентом 424 (например, так, чтобы автоматический инжектор 432 мог вводить контрастную среды пациенту 424). Автоматический инжектор 432 может содержать дисплей 434 и по меньшей мере одно устройство для ввода пользователем 436 любого подходящего типа (например, клавиатуру, мышь, сенсорную панель, джойстик, шаровой манипулятор, или тому подобное). Как дисплей 434, так и одно или несколько таких устройств для ввода данных пользователем 436 могут быть ассоциированы с силовой насадкой автоматического инжектора 432.
Удаленная консоль 404 (например, компьютер) из системы инъекции контрастной среды 430 может располагаться в кабинете контроля 402. Компоненты удаленной консоли 404 включают дисплей удаленной консоли 406 и по меньшей мере одно устройство для ввода пользователем 408. Каждое устройство для ввода пользователем 408 системы инъекции 430 может быть любого подходящего типа, например, в форме клавиатуры, мыши, сенсорной панели, джойстика, шарового манипулятора, или тому подобного. Удаленная консоль 404 функционально соединяется с автоматическим инжектором 432 посредством линии связи 410 любого подходящего типа. В целом, пользователь может программировать параметры инъекции для автоматического инжектора 432 (например, определять протокол инъекции, например, одну или несколько фаз, где каждая фаза включает такие параметры инъекции, как объем контрастной среды, которую нужно ввести, и скорость потока инъекции, вместе с возможностью одной или нескольких задержек инъекции (например, задержки или паузы)) посредством устройства для ввода данных пользователем 408 или удаленной консоли 404.
Комплект для визуализации 400 также включает систему медицинской визуализации 407. Система медицинской визуализации 407 включает удаленную консоль 409 и устройство для визуализации 422. Устройство для визуализации 422 может быть любого подходящего размера, формы, конфигурации, и/или типа, и его функция получения изображения может использовать любую подходящую технологию или комбинацию технологий. В одном варианте осуществления устройство визуализации 422 находится в форме КТ сканера.
Удаленная консоль 409 (например, компьютер) системы медицинской визуализации 407 может быть расположена в кабинете контроля 402. Компоненты удаленной консоли 409 могут содержать дисплей удаленной консоли 411 и по меньшей мере одно устройство для ввода данных пользователем 413. Каждое устройство для ввода данных пользователем 413 из системы медицинской визуализации 407 может быть любого подходящего типа, например, в форме клавиатуры, мыши, сенсорной панели, джойстика, шарового манипулятора, или тому подобного. Удаленная консоль 409 системы визуализации 407 функционально соединена с устройством визуализации 422 посредством линии связи 415 любого подходящего типа. В целом, пользователь может программировать параметры визуализации для устройства визуализации 422 и/или контроля (например, начала и/или прекращения) процедур визуализации с помощью устройства для ввода данных пользователем 413 из удаленной консоли 409.
Система медицинской визуализации 407 (например, удаленная консоль 409) может быть функционально соединена с системой инъекции контрастной среды 430 (например, ее удаленной консолью 404). В случае, если система визуализации 407 действительно функционально связана с системой инъекции 430, некоторые варианты осуществления позволяют пользователю программировать параметры инъекции и/или контролировать (например, начинать и/или прекращать) процедуры инъекции для автоматического инжектора 432 с помощью устройства для ввода данных пользователем 413 удаленной консоли 409 системы визуализации, в дополнение к выполнению функций программирования и/или контроля, описанных здесь в связи с устройством визуализации 422. В некоторых вариантах осуществления комплекта визуализации 400, система инъекции 430 и система медицинской визуализации 407 имеют единственную общую удаленную консоль (не показана), с которой пользователь может выполнять любую из описанных здесь программ и/или контрольных операций для устройства визуализации 422 и автоматического инжектора 432.
Различные протоколы, описываемые здесь, могут в частности относиться к тому, что можно охарактеризовать как инжектор с двойной головкой. В системе инъекции контрастной среды 430 с Фигуры 3A может применяться такой инжектор с двойной головкой (например, автоматический инжектор 432 на Фигуре 3A может быть в форме инжектора с двойной головкой). Схематическое изображение системы инъекции медицинской жидкости, способной по отдельности или одновременно вводить две различных медицинских жидкости, показано на Фигуре 3B, и обозначено справочным номером 450. Система инъекции медицинской жидкости 450 включает сторону «A» (например, одну головку) и сторону «B» (например, другую головку). Стороны A и B системы инъекции медицинской жидкости 450 могут быть встроены в общую силовую насадку (например, силовую насадку 50) автоматического инжектора (например, автоматического инжектора 40) для определения конфигурации с двойной головкой.
Сторона A системы инъекции медицинской жидкости 450 включает приводной механизм поршня первого шприца 452a и первый шприц 460a. Приводной механизм поршня первого шприца 452a содержит первый источник управления 454a, способный продвигать первый приводной плунжер 456a по осевому пути по меньшей мере в первом направлении, связанном с разгрузочным тактом, хотя первый источник управления 454a может продвигать первый приводной плунжер 456a в каждом из первого и второго направлений по осевому пути. Подобным образом, приводной механизм поршня второго шприца 452b содержит второй источник управления 454b, способный продвигать второй приводной плунжер 456b по осевому пути по меньшей мере в первом направлении, связанном с разгрузочным тактом, хотя второй источник управления 454b может продвигать второй приводной плунжер 456b в каждом из первого и второго направлений по осевому пути.
Первый шприц 460a связан со стороной A системы инъекции медицинской жидкости 450. Этот первый шприц 460a содержит цилиндр первого шприца 462a, вместе с поршнем первого шприца 464a, который располагается внутри цилиндра первого шприца 462a. Первая выпускная ветвь 472a набора трубок 470 гидравлически соединена с выпускным портом(ами) первого шприца 460a. Подобным образом, второй шприц 460b связан со стороной В системы инъекции медицинской жидкости 450. Этот второй шприц 460b содержит цилиндр второго шприца 462b, вместе с поршнем второго шприца 464b, который располагается внутри цилиндра второго шприца 462b. Вторая выпускная ветвь 472b набора трубок 470 гидравлически соединена с выпускным портом(ами) первого шприца 460a. В иллюстрированном варианте осуществления первая выпускная ветвь 472a и вторая выпускная ветвь 472b набора трубок 470 объединяются в общую выпускную ветвь 474.
Первая медицинская жидкость 466a (например, контрастная среда) содержится в цилиндре первого шприца 462a. Манипуляция приводным механизмом поршня первого шприца 452a продвигает первый приводной плунжер 456a относительно цилиндра первого шприца 462a, который в свою очередь продвигает поршень первого шприца 464a относительно цилиндра первого шприца 462a для выпуска первой медицинской жидкости 466a из первого шприца 460a в набор трубок 470. Подобным образом, вторая медицинская жидкость 466b (например, солевой раствор) содержится в цилиндре второго шприца 462b. Манипуляция приводным механизмом поршня второго шприца 452b продвигает второй приводной плунжер 456b относительно цилиндра второго шприца 462a, который в свою очередь продвигает поршень второго шприца 464b относительно цилиндра шприца 462b для выпуска второй медицинской жидкости 466b из второго шприца 460b в набор трубок 470.
Необходимо понимать, что система инъекции медицинской жидкости 450, представленная на Фигуре 3B, может применяться для отдельной инъекции первой медицинской жидкости 466a пациенту в общем участке инъекции (например, посредством манипуляции приводным механизмом поршня первого шприца 452a, при этом не манипулируя приводным механизмом поршня второго шприца 452b), для отдельной инъекции второй медицинской жидкости 466b в том же самом общем участке инъекции (например, посредством манипуляции приводным механизмом поршня второго шприца 452b, при этом не манипулируя приводным механизмом поршня первого шприца 452a), и для одновременной инъекции первой медицинской жидкости 466a и второй медицинской жидкости 466b пациенту в одном и том же общем участке инъекции (например, посредством одновременной манипуляции приводным механизмом поршня первого шприца 452a и приводным механизмом поршня второго шприца 452b). Другие наборы трубок могут применяться с системой инъекции медицинской жидкости 450, в которой приводными механизмами поршней шприцев 452a, 452b можно манипулировать по отдельности или одновременно.
На Фигуре 3C схематически изображен один вариант осуществления модуля контроля/логической схемы автоматического инжектора 122 для системы инъекции медицинской жидкости 450, изображенной на Фигуре 3 В, который может применяться в любом подходящем автоматическом инжекторе или любой подходящей системе инъекции медицинской жидкости, включая автоматический инжектор 10, изображенный на Фигуре 1, автоматический инжектор 40, изображенный на Фигурах 2A-C, и систему инъекции медицинской жидкости 430 изображенную на Фигуре 3A, но не ограничиваются ими. Одно или несколько устройств для ввода данных пользователем 126 любой подходящей конфигурации и/или типа (например, в соответствии с вариантом осуществления, изображенном на Фигуре 3A) может быть функционально соединено с модулем/логической схемой контроля автоматического инжектора 122. Множество устройств для ввода данных 126 могут применяться и могут располагаться в любом подходящем участке (например, в кабинете контроля 402, например, в качестве части удаленной консоли 404; в кабинете визуализации 420). Указанное устройство для ввода данных 126 может передавать информацию не только для системы инъекции медицинской жидкости 450, но также для системы визуализации (например, для системы визуализации 407, например, через общую контрольную консоль, которая передает информацию для каждой из системы инъекции медицинской жидкости и системы визуализации).
Один или несколько дисплеев 124 любой подходящей конфигурации и/или типа могут также быть функционально соединены с модулем/логической схемой контроля автоматического инжектора 122. Множество дисплеев 124 могут применяться и могут располагаться в любом подходящем участке (например, в кабинете контроля 402, например, в качестве части удаленной консоли 404; в кабинете визуализации 420, например, в качестве части силовой насадки, которая включает A и B стороны системы инъекции медицинской жидкости 450). Данный дисплей 124 может быть связан не только с системой инъекции медицинской жидкости 450, но также с системой визуализации (например, системой визуализации 407, например, через общую контрольную консоль, сообщающейся с каждой из системы инъекции медицинской жидкости и системы визуализации). В одном или нескольких из дисплеев 124 может применяться функция сенсорной панели.
В иллюстрированном варианте осуществления модуль/логическая схема контроля автоматического инжектора 122, изображенного на Фигуре 3C, включает модуль/логическую схему протокола инъекции 128, модуль/логическую схему определения скорости потока 130, модуль/логическую схему определения объема инъекции 132, модуль/логическую схему контроля дисплея 134, модуль/логическую схему контроля движения приводного плунжера 136, и модуль/логическую схему контроля давления 138. Примеры протоколов/конфигураций, которые могут применяться в каждом из модулей, показанных на Фигуре 3C, более подробно обсуждаются ниже. Другие модули могут применяться в модуле/логической схеме контроля автоматического инжектора 122. Например, система инъекции медицинской жидкости 450 может содержать модуль, содержащий один или несколько протоколов инъекции, которые предварительно запрограммированы и хранятся в подходящей машиночитаемой среде хранения (например, в библиотеке или хранилище данных протоколов инъекции, которые могут запускаться системой инъекции медицинской жидкости 450). Такой модуль может сообщаться и/или быть частью модуля/логической схемы контроля автоматического инжектора 122. Протокол инъекции может включать одну или несколько запрограммированных фаз. Каждая фаза протокола инъекции может включать параметры инъекции, такие как общее количество жидкости, подлежащей введению, и скорость потока инъекции, а также возможность одной или нескольких задержек (иногда обозначаемых как «задержки» и/или «паузы»), и каждая из которых может иметь ограниченную или неограниченную продолжительность. Фаза протокола инъекции может быть направлена на инъекцию единственной жидкости в единственном участке инъекции. Фаза протокола инъекции может быть направлена на одновременную инъекцию множества жидкостей (например, контрастной среды и солевого раствора) в единственном участке инъекции. Протокол инъекции может включать одну или несколько фаз, запрограммированных любым подходящим образом.
Другие программируемые протоколы могут применяться в модуле/логической схеме контроля автоматического инжектора 122, изображенного на Фигуре 3C, например, модуль, включающий один или несколько протоколов OptiBolus®, модуль, включающий один или несколько протоколов капельного режима. В целом, протокол OptiBolus® может быть сконструирован для обеспечения инъекции с экспоненциально затухающей скоростью потока, которая оптимизирует применение контрастной среды и обеспечивает продленный период однородного усиления интересующей области. Протокол инъекции Timing Bolus® может быть сконструирован для инъекции расчетного болюса - малого объема контрастной среды, с последующим введением малого объема солевого раствора пациенту, с целью определения оптимальной задержки сканирования, необходимой для улавливания контрастной среды в интересующей области. Протокол капельного режима может быть сконструирован для обеспечения капельной инъекции - инъекции с низкой скоростью потока малого объема солевого раствора, доставляемого пациенту для сохранения открытым пути жидкости от автоматического инжектора пациенту.
В данном модуле/логической схеме контроля автоматического инжектора 122 могут применяться один или несколько из вышеупомянутых модулей/логических схем и в любой подходящей комбинации. Необходимо понимать, что способ, в соответствии с которым в модуле/логической схеме контроля автоматического инжектора 122 применяется одна или несколько из вышеупомянутых функций, а также то, к чему они адресованы далее, не имеет особого значения. Любая конфигурация или размещение может применяться в модуле/логической схеме контроля автоматического инжектора 122, для обеспечения одной или нескольких из этих функций.
Один вариант осуществления протокола настройки инъекции, который может применяться в модуле/логической схеме протокола инъекции 128 (Фигура 3C), показан на Фигуре 4 и обозначен справочным номером 140. Протокол инъекции для выполнения системой инъекции медицинской жидкости 450 может быть запрограммирован в системе инъекции медицинской жидкости 450 в соответствии с протоколом настройки инъекции 140. Этап 142 протокола 140 с Фигуры 4 направлен на установку заданного давления. В иллюстрированном варианте осуществления единственное заданное давление может быть установлено в протоколе инъекции, будучи запрограммированным независимо от того, сколько фаз применяется протоколом инъекции (например, одно и то же заданное давление может применяться к каждой фазе протокола инъекции). В целом, заданное давление, которое устанавливают для этапа 142, может применяться для контроля работы системы инъекции медицинской жидкости 450, например, скорости, с которой продвигаются один или оба приводных плунжера 456a, 456b системы инъекции медицинской жидкости 450. Это будет более подробно обсуждаться ниже по отношению к протоколу контроля движения приводного плунжера 270 с Фигуры 8.
Заданное давление, связанное с этапом 142, может совпадать с запрограммированной величиной, обеспеченной пользователем (например, вводом данных пользователем в систему инъекции медицинской жидкости 450 через значок пикового давления 212, что будет обсуждаться более подробно в отношении одного или нескольких экранов, которые могут применяться системой инъекции медицинской жидкости 45 - Фигуры 10-13). То есть, если пользователь программирует протокол инъекции с пиковым давлением 325 фунт/кв. дюйм, заданное давление для этапа 142 также может быть установлено на 325 фунт/кв. дюйм. Однако, заданное давление, связанное с этапом 142, может быть получено на любой подходящей основе из значения, которое пользователь запрограммировал в качестве пикового давления. Например, заданное давление может быть определено с помощью алгоритма, который применяет запрограммированное пиковое давления в качестве вводимых данных (например, заданное давление = пиковое давление минус 25 фунт/кв. дюйм (или любое другое подходящее значение)).
Любое подходящее число фаз может быть определено протоколом настройки инъекции 140. Фаза, определяемая для протокола инъекции, может быть установлена любым подходящим образом, согласующимся с этапом 144, и может быть определена следующим образом. Этапы 146, 148, 150 и 152 могут выполняться в любом подходящем порядке. Этап 146 направлен на выбор того, будет ли текущая определяемая фаза связана с работой только на стороне A системы инъекции медицинской жидкости 450 (идентифицируется обозначением «A» на этапе 146), с работой только на стороне В системы инъекции медицинской жидкости 45 (идентифицируется обозначением «B» на этапе 146), или с одновременной работой на сторонах A и B системы инъекции медицинской жидкости 450 (идентифицируется обозначением «AB» на этапе 146). Другие параметры для фазы, которые можно определить в протоколе 140, включают (1) ввод заданной скорости потока для системы инъекции медицинской жидкости, согласующейся с этапом 148; (2) ввод общего объема инъекции для системы инъекции медицинской жидкости 450, относящегося к этапу 150; и (3) ввод продолжительности фазы системы инъекции медицинской жидкости 450, относящейся к этапу 152; но не ограничиваются ими.
В случае, если выбирается фаза одновременной инъекции при выполнении этапа 146 (т.е. выбирается «AB» на этапе 146), то протокол 140 направляется от этапа 154 на этапы 156 и 158. Этап 156 и этап 158 могут выполняться в любом подходящем порядке. Этап 156 направлен на выполнение протокола определения скорости потока 170, который более подробно обсуждается ниже по отношению к Фигуре 5, но в целом относится к тому, как определяются скорости потоков для стороны A и стороны B системы инъекции медицинской жидкости 450 для фазы одновременной инъекции. Этап 158 направлен на выполнение протокола определения объема инъекции 190, который обсуждается более подробно по отношению к Фигуре 6, но который в целом относится к определению объемов инъекции для стороны A и стороны B системы инъекции медицинской жидкости 450 для фазы одновременной инъекции. Необходимо понимать, что протокол настройки инъекции 140 (Фигура 4), а также протокол определения скорости потока 170 (Фигура 5) и протокол определения объема инъекции 190 (Фигура 6) могут быть построены так, чтобы избежать двойного выполнения этапов.
Каждый из различных параметров, вводимых в соответствии с протоколом настройки инъекции 140, изображенном на Фигуре 4, для конкретной фазы (например, работа приводного плунжера(ов) 456a, 456b (этап 146), заданная скорость потока (этап 148), общий объем инъекции (этап 150) и продолжительность фазы (152)) может характеризоваться как вводимый пользователем. Любое подходящее устройство для ввода данных 126 системы инъекции медицинской жидкости 450 может применяться для ввода каждого такого параметра. В любом случае, и после определения соответствующих параметров данной фазы в соответствии с вышеизложенным, может проводиться определение в соответствии с этапом 160, все ли необходимые фазы протокола инъекции определены при выполнении протокола настройки инъекции 140. Если нет, протокол настройки инъекции 140 возвращается к этапу 144 для повторения в соответствии с вышеизложенным. В противном случае, протокол 140 может заканчиваться на этапе 162.
Один вариант осуществления протокола определения скорости потока, который может применяться в модуле/логической схеме определения скорости потока 130 (Фигура 3C) показан на Фигуре 5 и обозначен справочным номером 170. Как упоминалось ранее, протокол определения скорости потока 170 может выполняться в соответствии с этапом 156 протокола настройки инъекции 140 (Фигура 4). В любом случае, протокол определения скорости потока 170 может выполняться для случая, когда фаза программируемого протокола инъекции включает одновременное введение множества жидкостей (например, фазу одновременной инъекции). Этап 148 протокола настройки инъекции 140, вновь, направлен на ввод заданной скорости потока. Заданная скорость потока, которую вводят для этапа 148, должна быть общей скоростью потока, который необходимо ввести пациенту в конфигурации одновременной инъекции (например, где сторона A и сторона B системы инъекции медицинской жидкости 450 одновременно работают для одновременной инъекции первой жидкости 466a и второй жидкости 466b пациенту). Данные с этапа 148 протокола настройки инъекции 140 могут применяться протоколом определения скорости потока 170 с Фигуры 5, либо протокол определения скорости потока 170 может быть построен для независимого получения данных об общей заданной скорости потока.
Определяемая концентрация для фазы одновременной инъекции может быть введена в систему инъекции медицинской жидкости 450 в соответствии с этапом 172 протокола определения скорости потока 170. Этап 172 может быть выполнен в любое время после выбора обозначения «AB» по отношению к этапу 146 протокола настройки инъекции 140. В любом случае, любой подходящий формат можно применять для ввода концентрации. В целом, концентрация относится к относительным количествам первой жидкости 466a и второй жидкости 466b, одновременно вводимым в определяемую фазу. В одном варианте осуществления, концентрация может быть введена в форме числа, которое идентифицируется как процентное отношение количества первой жидкости 466a, предназначенной для введения в данную фазу, относительно общего количества первой жидкости 466a и второй жидкости 466b, одновременно вводимых в данную фазу.
Что касается этапа 174 протокола определения скорости потока 170, система инъекции медицинской жидкости 450 рассчитывает заданную скорость потока для стороны A (например, скорость, с которой приводной плунжер 456a должен продвигаться для реализации заданной скорости потока - скорости потока первой жидкости 466a, которая выпускается из первого шприца 460a посредством работы приводного механизма поршня первого шприца 452a) от заданной скорости потока (этап 148 протокола настройки инъекции 140) и концентрации (этап 172 протокола определения скорости потока 170), и далее рассчитывает заданную скорость потока для стороны В (например, скорость, с которой приводной плунжер 456b должен продвигаться для реализации заданной скорости потока - скорости потока второй жидкости 466b, которая выпускается из второго шприца 460b посредством работы приводного механизма поршня второго шприца 452b) от заданной скорости потока (этап 148 протокола настройки инъекции 140) и концентрации (этап 172 протокола определения скорости потока 170).
В некоторых случаях заданные скорости потока для сторон A и B системы инъекции 450 являются просто соответствующими процентами от концентрации (этап 172 протокола определения скорости потока 140), умноженными на общую заданную скорость потока (этап 148 протокола настройки инъекции 140). Например, если общая заданная скорость потока от этапа 148 протокола настройки инъекции 140 была 10 мл/сек, а концентрация на этапе 172 протокола определения скорости потока 170 была 60%, система инъекции 450 может рассчитать заданную скорость потока для стороны A путем умножения заданной скорости потока (10 мл/сек) на 0,6, с получением заданной скорости потока на стороне A 6 мл/сек, и система инъекции 450 может рассчитать заданную скорость потока для стороны B путем умножения общей заданной скорости потока (10 мл/сек) на 0,4, с получением заданной скорости потока для стороны В 4 мл/сек. В зависимости от амплитуды концентрации, заданные скорости потока для сторон A и B, рассчитываемые системой инъекции медицинской жидкости 450, могут не быть точно пропорциональными концентрации (например, один или несколько факторов могут определять отклонение концентрации от 50% первой жидкости 466a и 50% второй жидкости 466b).
Система инъекции медицинской жидкости 450 также рассчитывает заданное давление для стороны A и стороны B из заданного давления (этап 142 протокола настройки инъекции 140; например, на основе по меньшей мере некоторого способа при вводе пользователем, либо напрямую с применением ввода пользователем заданного давления, либо непрямым способом, с вводом пользователем пикового давления, из которого можно получить заданное давление, как описано выше) и концентрации (этап 172 протокола определения 170) в отношении к этапу 176 протокола определения скорости потока 170. Имеется ряд вариантов для расчета системой инъекции 450 заданного давления для сторон A и B. В одном варианте осуществления заданные давления для сторон A и B системы инъекции 450 являются просто соответствующими процентами концентрации (этап 172), умноженными на заданное давление (этап 142 протокола настройки инъекции 140). Например, если заданное давление с этапа 142 протокола настройки инъекции 140 было 300 фунт/кв. дюйм, а концентрация на этапе 172 протокола определения скорости потока 170 была 60%, система инъекции 450 может рассчитать заданное давление для стороны A путем умножения заданного давления (300 фунт/кв. дюйм) на 0,6, для получения заданного давления для стороны A 180 фунт/кв. дюйм, и система инъекции 450 может рассчитать заданное давление для стороны B путем умножения заданного давления (300 фунт/кв. дюйм) на 0,4, для получения заданного давления для стороны В 120 фунт/кв. дюйм. В зависимости от амплитуды концентрации, заданное давление для сторон A и B, рассчитываемое системой инъекции медицинской жидкости 450, может не быть точно пропорциональным концентрации (например, один или несколько факторов могут определять отклонение концентрации от 50% первой жидкости 466a и 50% второй жидкости 466b).
В другом варианте осуществления заданное давление для каждой из сторон A и B исходно настраивается системой инъекции 450 на общее заданное давление (этап 142 протокола настройки инъекции 140; например, на основе по меньшей мере некоторого способа при вводе пользователем, либо напрямую с применением ввода пользователем заданного давления, либо непрямым способом, с вводом пользователем пикового давления, из которого можно получить заданное давление, как описано выше). Индивидуальные заданные давления для каждой из сторон A и B затем определяются системой инъекции 450 посредством вычитания фактора коррекции из общего заданного давления, и где фактор коррекции для каждой из сторон A и B является результатом квадратного уравнения, в котором применяется концентрация (этап 172 протокола определения скорости потока 170) в виде вводимых данных.
Необходимо понимать, что заданную скорость потока и заданное давление для стороны A и стороны A системы инъекции медицинской жидкости 450 можно рассчитать в любом подходящем порядке, и в соответствии с вышеизложенным (например, этап 176 можно выполнять перед этапом 174). Как только и заданная скорость потока, и заданное давление для каждой из сторон A и B рассчитаны системой инъекции медицинской жидкости 450, протокол определения скорости потока 170 возвращается к контролю по протоколу настройки инъекции 140 с Фигуры 4 через выполнение этапа 178.
Один вариант протокола определения объема инъекции, который может применяться в модуле/логической схеме определения объема инъекции 132 (Фигура 3C) проиллюстрирован на Фигуре 6 и обозначен справочным номером 190. Как отмечалось ранее, протокол определения объема инъекции 190 может выполняться в соответствии с этапом 158 протокола настройки инъекции 140 (Фигура 4), в любом случае, протокол определения объема инъекции 190 может выполняться для случая, где запрограммированная фаза протокола инъекции включает одновременную инъекцию множества жидкостей (например, фаза одновременной инъекции). Этап 150 протокола настройки инъекции 140, вновь, направлен на ввод общего объема инъекции. Общий объем инъекции, который вводится в соответствии с этапом 150, должен быть общим объемом, который необходимо ввести пациенту в конфигурации одновременной инъекции (например, где сторона A и сторона B системы инъекции медицинской жидкости 450 одновременно работают для одновременной инъекции первой жидкости 466a и второй жидкости 466b пациенту). Данные с этапа 150 протокола настройки инъекции 140 могут применяться протоколом определения объема инъекции 190 с Фигуры 6, или протокол определения объема инъекции 190 может быть построен для независимого получения данных по общему объему инъекции.
Определяемую концентрацию для фазы одновременной инъекции можно вводить в систему инъекции медицинской жидкости 450 в соответствии с этапом 192 протокола определения объема инъекции 190. Этап 192 может выполняться в любое время после выбора значка «AB» в соответствии с этапом 146 протокола настройки инъекции 140. Обсуждение, представленное выше по отношению к концентрации и этапу 172 протокола определения скорости потока 170, также в равной степени применимо к этапу ввода концентрации 192 протокола определения объема инъекции 190. Далее, и как отмечалось выше, пользователю может быть нужно только ввести концентрацию один раз для определения фазы одновременной инъекции (т.е. можно использовать один и тот же ввод концентрации для каждого из протокола определения скорости потока 170 и протокола определения объема инъекции 190).
Система инъекции медицинской жидкости 450 рассчитывает объем инъекции и для своей стороны A, и для своей стороны B из общего объема инъекции (этап 150 протокола настройки инъекции 140) и концентрации (этап 192 протокола определения объема инъекции 190) по отношению к этапу 194 протокола определения объема инъекции 190. В некоторых случаях объемы инъекции для сторон A и B системы инъекции 450 просто будут соответствующим процентным значением концентрации, умноженным на общий объем инъекции. Например, если общий объем инъекции (этап 150 протокола 140) составил 10 мл, а концентрация (этап 192 протокола 190) составила 60%, система инъекции 450 может рассчитать объем инъекции для стороны A умножением общего объема инъекции (100 мл) на 0,6 для получения объема инъекции для стороны A 60 мл, и система инъекции 450 может рассчитать объем инъекции для стороны B путем умножения общего объема инъекции (100 мл) на 0,4 для получения объема инъекции для стороны B 40 мл. В зависимости от амплитуды концентрации, объемы инъекции для сторон A и B, рассчитанные системой инъекции медицинской жидкости 450, могут не быть точно пропорциональными концентрации (например, один или несколько факторов могут определять отклонение концентрации от 50% первой жидкости 466a и 50% второй жидкости 466b). В любом случае, как только объем инъекции для сторон A и B рассчитан системой инъекции медицинской жидкости 450, протокол определения объема инъекции 190 возвращается к протоколу настройки инъекции 140 Фигуры 4 через выполнение этапа 196.
Один вариант осуществления протокола контроля дисплея, который может применяться в модуле\логической схеме контроля дисплея 134 (Фигура 3), показан на Фигуре 7 и обозначен справочным номером 200. В целом, протокол контроля дисплея 200 направлен на передачу информации о концентрации в фазе одновременной инъекции протокола контроля инъекции с применением по меньшей мере одного многоцветного графического изображения, где относительные количества множества цветов в таком многоцветном графическом изображении соответствуют концентрации.
Этап 202 протокола контроля дисплея 200 направлен на ввод значения концентрации в систему инъекции медицинской жидкости 450. Этап 202 может выполняться в любое время после выбора обозначения «AB» по отношению к этапу 146 протокола настройки инъекции 140. Обсуждение, представленное выше по отношению к концентрации и этапу 172 протокола определения скорости потока 170, также в равной степени применяется к этапу ввода концентрации 202 протокола контроля дисплея 200. Концентрация для этапа 202 протокола 200 может быть взята системой инъекции медицинской жидкости 450 из фазы одновременной инъекции предварительно определенного протокола инъекции. Концентрация для этапа 202 может также быть введена в систему инъекции медицинской жидкости 450 по отношению к фазе одновременной инъекции, которая уже запрограммирована в системе инъекции медицинской жидкости 450. В любом случае значение, вводимое по отношению к этапу 202, можно применять для переменной запрограммированной концентрации (этап 204). Можно получить по меньшей мере одно многоцветное графическое изображение, и представить на одном или нескольких дисплеях 124 системы инъекции медицинской жидкости 450 (этап 206) в соответствии с концентрацией с этапа 202. В одном варианте осуществления количество первой жидкости 466a, подлежащей введению в данную фазу одновременной инъекции, соответствует первому количеству первого цвета в одном или нескольких многоцветных графических изображениях, в то время как количество второй жидкости 466b, подлежащей введению в ту же самую фазу одновременной инъекции, соответствует второму количеству второго цвета в одном или нескольких многоцветных графических изображениях.
Протокол контроля дисплея 200 может выполняться в любое подходящее время. Протокол контроля дисплея 200 может выполняться, когда протокол инъекции программируется, когда протокол инъекции редактируется, или когда протокол инъекции выполняется системой инъекции медицинской жидкости 450.
Один вариант осуществления протокола контроля движения приводного плунжера, который может применяться модулем/логической схемой контроля движения приводного плунжера 136 (Фигура 3), показан на Фигуре 8 и обозначен справочным номером 270. В целом, протокол контроля движения приводного плунжера 270 может быть охарактеризован как обеспечивающий контроль на основе давления для скорости приводного плунжера 456 (например, приводного плунжера 456a; приводного плунжера 456b) системы инъекции медицинской жидкости (например, системы инъекции медицинской жидкости 450). Протокол контроля движения приводного плунжера 270 может применяться для контроля скорости каждого приводного плунжера 456a, 456b системы инъекции медицинской жидкости 450 с Фигур 3B и 3C, при независимом или одновременном выполнении.
Этап 272 протокола контроля движения приводного плунжера 270 направлен на получение заданного давления, связанного с приводным плунжером 456 (например, приводным плунжером 456a; приводным плунжером 456b). В фазе неодновременной инъекции протокола инъекции это может быть величиной, установленной в ответ на ввод пользователем (например, посредством этапа 142 протокола настройки инъекции 140 с Фигуры 4, как обсуждалось выше). В фазе одновременной инъекции протокола инъекции заданное давление для этапа 272 протокола контроля движения приводного плунжера 270 может быть обеспечено этапом 176 протокола определения скорости потока 170 с Фигуры 5.
Этап 274 протокола контроля движения приводного плунжера 270 направлен на получение заданной скорости потока для приводного плунжера 456 в фазе неодновременной инъекции протокола инъекции, это может быть величиной, вводимой пользователем (например, посредством этапа 148 протокола настройки 140 с Фигуры 4). В фазе одновременной инъекции протокола инъекции заданная скорость потока 274 протокола контроля движения приводного плунжера 270 может быть обеспечена этапом 174 протокола определения скорости потока 170 с Фигуры 5.
Этап 276 протокола контроля движения приводного плунжера 270 направлен на получение нового или обновленного значения наблюдаемого давления для текущего действия приводного плунжера 456. Это давление может быть получено любым подходящим образом, включая выполнение протокола контроля давления 290, что будет обсуждаться ниже по отношению к Фигуре 9. В любом случае, скорость приводного плунжера 456 получают как из заданного давления (этап 272), так и из наблюдаемого давления (этап 276) для приводного плунжера 456, относящегося к этапу 278, в том числе на основе разницы между этими величинами.
Этап 278 может выполняться для наблюдаемого давления, основанного на одном моменте времени. Другой вариант для этапа 278 заключается в применении меняющегося среднего значения наблюдаемого давления, обеспеченного этапом 276 (например, значение наблюдаемого давления, используемое на этапе 278, может быть средним значением от самых последних значений наблюдаемого давления, обеспеченных на этапе 276). В любом случае, в ситуации, когда в соответствии с этапом 280 определено, что полученная скорость для приводного плунжера 456 (этап 278) не превышает порогового значения (например, скорость приводного плунжера 456, которая должна обеспечить заданную скорость потока для приводного плунжера 456 - этап 274), этап 282 можно применять для продвижения приводного плунжера 456 при полученной скорости от этапа 278. Однако, в случае, если в соответствии с этапом 280 определено, что скорость, полученная для приводного плунжера 456 (этап 278), не превышает порогового значения (например, скорость для приводного плунжера 456, которая будет обеспечивать заданную скорость потока для приводного плунжера - этап 274), этап 284 можно применять для продвижения приводного плунжера 456 со скоростью, которая обеспечит заданную скорость потока (этап 274). После этого, может быть получено новое значение наблюдаемого давления (276), и этапы 278 и 280 повторяют в соответствии с вышеизложенным.
Разницу между заданным давлением (этап 272) и наблюдаемым давлением (этап 276) можно применять для получения скорости для приводного плунжера 446 на этапе 278 протокола контроля движения приводного плунжера 270. Этап 278 можно охарактеризовать как направленный на определение значения скорости для приводного плунжера 456 таким образом, чтобы попытаться снизить амплитуду ошибки между заданным давлением (этап 272) и наблюдаемым давлением (этап 276). В одном варианте осуществления в этапе 278 применяется по меньшей мере пропорционально-дифференциальный контроллер для получения значения скорости приводного плунжера из значения заданного давления и обновленного значения наблюдаемого давления (например, с помощью пропорционального члена и дифференциального члена). В одном варианте осуществления в этапе 278 применяется ПИД-контроллер (пропорционально-интегрально-дифференциальный контроллер) для получения значения скорости приводного плунжера из заданного давления и обновленного значения наблюдаемого давления, хотя фактически могут применяться не все три члена такого контроллера.
Протокол контроля движения приводного плунжера 270 может применяться для контроля скорости, при которой данный приводной плунжер 456 продвигается на протяжении протокола инъекции, и в том числе в связи с каждой фазой протокола инъекции. Протокол контроля движения приводного плунжера 270 может выполняться от начала по меньшей мере одной фазы протокола инъекции, и затем может выполняться на протяжении оставшейся части соответствующей фазы. При первом выполнении этапа 278 для данной фазы протокола инъекции, наблюдаемое давление с этапа 276 может быть равно нулю (т.е. первое выполнение этапа 278 может быть проведено перед продвижением приводного плунжера 456 любым образом). Оно должно совпадать с максимальной ошибкой между заданным давлением (этап 272) и наблюдаемым давлением (этап 276). Однако, протокол контроля движения приводного плунжера 270 может быть начат с продвижением приводного плунжера 456 при некоторой исходной не-нулевой скорости для первого выполнения этапа 278.
Один вариант протокола контроля давления, который может применяться в модуле/логической схеме контроля давления 138 (Фигура 3C), показан на Фигуре 9 и обозначен справочным номером 290. В целом, протокол контроля давления 290 может применяться для получения давления, связанного с работой приводного плунжера 456 (например, приводного плунжера 456a, 456b системы инъекции медицинской жидкости 450), который продвигается соответствующим источником управления 454 (например, источником управления 454a, 454b системы инъекции медицинской жидкости 450). Мощность, подаваемая на связанный источник управления 454, может быть получена любым подходящим способом (этап 292). В одном варианте осуществления подаваемая мощность получена из сигнала (например, контролирующего чипа), который в это время используется для обеспечения работы источника управления 454. Скорость источника управления 456 может быть получена любым подходящим образом (этап 294). Например, каждый источник управления 454a, 454b может иметь кодирующее колесо, которое может применяться для определения скорости в оборотах в минуту на единицу времени, и это можно превращать в линейную скорость для соответствующего приводного плунжера 456a, 456b.
Значение наблюдаемого давления может определяться (например, может быть рассчитано или получено) из вводимой мощности (этап 292) и скорости приводного плунжера (этап 294), относящейся к этапу 296 протокола контроля давления 290, любым подходящим способом. В случае, если протокол инъекции не выполнен или не закончен, протокол контроля давления 290 может возвращаться на этап 292 для повторения в соответствии с вышеизложенным. В противном случае протокол контроля давления 290 может заканчиваться в соответствии с этапом 300.
Что касается этапа 296 протокола контроля давления 290 с Фигуры 9, можно эмпирически получить серию кривых (или серию уравнений (например, уравнение, определяющее кривую)), устанавливающих отношение вводимой мощности к давлению для каждой из множества линейных скоростей (кривую или уравнение для каждой линейной скорости). То есть, для данной линейной скорости может быть предварительно определено отношение вводимая мощность к давлению. Таким образом, зная скорость, можно установить соответствующую кривую/уравнение, и зная подаваемую мощность, можно определить давление из нее. Необходимо понимать, что может применяться интерполяция (например, если нет предварительно определенного отношения вводимой мощности к давлению для данной линейной скорости).
Фигуры 10-13 иллюстрирую примеры экранов или данные, выводимые на устройство отображения, которые могут применяться системой инъекции медицинской жидкости 450, показанной на Фигурах 3B и 3C, включая те, что связаны с выполнением одного или нескольких из протоколов 140 (Фигура 40, 170 (Фигура 5), 190 (Фигура 6), и 200 (Фигура 7), но не ограничиваются ими. В общем, каждый из этих экранов включает множество графических изображений или графических представлений (например, значков или кнопок). Каждое такое графическое изображение может применяться при программировании протокола инъекции, для передачи информации, касающейся протокола инъекции, или для того и другого.
Экран или данные, выводимые на устройство отображения 210, показанные на Фигуре 10, могут быть представлены на одном или нескольких дисплеях 124, используемых системой инъекции медицинской жидкости 450. Экран 210 иллюстрирует примерное программирование протокола инъекции для системы инъекции медицинской жидкости 450. Вначале экран 210 представляет значок/кнопку пикового давления 212. Единственное пиковое давление может быть запрограммировано для протокола инъекции, и может применяться для контроля скорости приводного плунжера 456a и/или 456b системы инъекции медицинской жидкости 450 во время конкретной фазы протокола инъекции в соответствии с протоколом контроля движения приводного плунжера 270, обсуждаемым выше в связи с Фигурой 8.
Протокол инъекции, запрограммированный на экране 210, показанном на Фигуре 10, включает три фазы. Любое подходящее число фаз может быть запрограммировано для протокола инъекции и/или может быть одновременно представлено на экране 210. Экран 210 включает значки или кнопки для трех фаз 214 - программируется одна для каждой фазы протокола инъекции (значок фазы 214 в форме «1» для фазы 1; значок фазы 214 в форме «2» для фазы 2; и значок фазы 214 в форме «3» для фазы 3). Каждая фаза иллюстрированного протокола инъекции, запрограммированная и связанная с экраном 210 (например, каждый значок для фазы 214), включает кнопку/значок связанного приводного плунжера 216, кнопку/значок общей скорости потока 218, кнопку/значок общего объема инъекции 220, и кнопку/значок продолжительности фазы 222. Все фазы, отличные от последней фазы протокола инъекции, могут также включать значок/кнопку задержки фазы 226. Таким образом, и в случае экрана 210, показанного на Фигуре 10, значок/кнопка задержки фазы 226 показан для каждой из фаз 1 и 2 программируемого протокола инъекции, но не для фазы 3.
Система инъекции медицинской жидкости 450 может быть запрограммирована с применением экрана 210, показанного на Фигуре 10. Пользователь может применять значок приводного плунжера 216 для выбора приводного плунжера 456a, 456b системы инъекции медицинской жидкости 450 для продвижения в соответствующую фазу. Каждый значок приводного плунжера 216 может быть переключен (например, последовательным нажатием или включением частного значка приводного плунжера 216) между по меньшей мере тремя состояниями или условиями - одним условием является работа только стороны A системы инъекции медицинской жидкости 450 (например, приводного механизма поршня шприца 452a), так чтобы только первая жидкость 466a выпускалась в набор трубок 470; другим условием является работа только стороны В системы инъекции медицинской жидкости 450 (например, приводного механизма поршня шприца 452b), так чтобы только вторая жидкость 466b выпускалась в набор трубок 470; а третьим условием является одновременная работа сторон A и B системы инъекции медицинской жидкости 450 (например, приводных механизмов поршня шприца 452a и 452b), так чтобы и первая жидкость 466a, и вторая жидкость 466b выпускались в набор трубок 470. Программирование инъекции на экране 210 показано на Фигуре 10: фаза 1 относится к работе только стороны A системы инъекции медицинской жидкости 450 (например, через соответствующий значок приводного плунжера 216, установленный на «A»); фаза 2 относится к одновременной работе сторон A и B системы инъекции медицинской жидкости 450 (например, через соответствующий значок приводного плунжера 216, установленный на «AB»); а фаза 3 относится к работе только стороны B системы инъекции медицинской жидкости 450 (например, через соответствующий значок приводного плунжера 216, установленный на «B»).
Значения для общей скорости потока, общего объема инъекции, продолжительности фазы, и задержки для каждой фазы могут вводиться путем нажатия, включения, или выбора (например, активации) соответствующего значка общей скорости потока 218, значка общего объема инъекции 220, значка продолжительности фазы 222, и значка задержки фазы 226. Активация любого из значков 218, 220, 222 и 226 обеспечивает для пользователя ввод необходимых значений с применением одного или нескольких устройств для ввода данных 126 (Фигура 3C). Заданное давление для программируемого протокола инъекции может быть установлено путем активации значка пикового давления 212 и ввода необходимого значения с применением одного или нескольких устройств для ввода данных 126 (Фигура 3C).
Когда значок приводного плунжера 216 в данную фазу установлен на конфигурацию «AB» (конфигурацию, где одновременно работают стороны A и B системы инъекции медицинской жидкости 450), значок/кнопка концентрации 224 генерируется на экране 210 для соответствующей фазы, чтобы позволить пользователю ввести необходимую концентрацию. В случае экрана 210, показанного на Фигуре 10, значок приводного плунжера 216 для второй фазы располагается в «AB» конфигурации, и такой значок концентрации 224 расположен на экране 210, позволяя пользователю ввести необходимую концентрацию. Далее, устройство для ввода данных 126 в форме ползунок 228 также представлено на экране 210. Пользователь может применять ползунок 228 для ввода необходимой концентрации (например, 70% в иллюстрированном варианте осуществления). Активацию любого из значка общей скорости потока 218, значка общего объема инъекции 220, значка продолжительности фазы 222, значка задержки фазы 226 может обеспечить подобное устройство для ввода данных 126 на экране 210 для ввода связанных значений для соответствующей фазы. Значения, представленные любой таким ползунком, могут, конечно, быть связаны с параметром, соответствующим активированному значку 218, 220, 222 и 226 (например, ползунок, представленный на экране 210 для ввода общей скорости потока для фазы, может представлять собой подходящий диапазон значений скорости потока, например, от 0 мл/сек до 10 мл/сек; ползунок, представленный на экране 210 для ввода общего объема инъекции для фазы, может представлять собой подходящий диапазон значений объема инъекции, например, до 400 мл). Система инъекции медицинской жидкости 450 может быть сконструирована для отображения устройства для ввода данных 126 на экране только для определенного времени после активации данных значков 212, 218, 220, 222, 224 и 226.
Информация о различных параметрах каждой фазы протокола инъекции может передаваться графически и численно в случае системы инъекции медицинской жидкости 450. В этом отношении и в связи с Фигурой 10, некоторые из графических изображений могут быть представлены только первым цветом 230 (например, желтым), некоторые из графических изображений могут быть представлены только вторым цветом 232 (например, розовым или бледно-лиловым), а некоторые из графических изображений могут быть представлены и первым цветом 230, и вторым цветом 232.
Графические изображения на экране 210, представленные только первым цветом 230, означают, что только первая жидкость 466a доставляется в соответствующую фазу. Поскольку значок приводного плунжера 216 установлен на сторону A для фазы 1 в варианте осуществления, показанном на Фигуре 10, каждый из значка приводного плунжера 216, значка общей скорости потока 218, значка общего объема инъекции 220, и значка задержки фазы 226 для первой фазы, показанных на экране 210 на Фигуре 10, представлен только в первом цвете 230.
Графические изображения на экране 210, представленные только во втором цвете 232, означают, что только вторая жидкость 466b доставляется в соответствующую фазу. Поскольку значок приводного плунжера 216 установлен на сторону В для фазы 3 в варианте осуществления, показанном на Фигуре 10, каждый из значка приводного плунжера 216, значка общей скорости потока 218, и значка общего объема инъекции 220 для третьей фазы, показанных на экране 210 на Фигуре 10, представлен только во втором цвете 232.
Графические изображения на экране 210, представленные и в первом цвете 230, и во втором цвете 232, означают, что доставляется и первая жидкость 466a и вторая жидкость 466b (например, вводятся одновременно) в соответствующую фазу. Поскольку значок приводного плунжера 216 установлен на сторону AB для фазы 2 в варианте осуществления, показанном на Фигуре 10, одна часть значков из значка приводного плунжера 216, значка общей скорости потока 218, значка общего объема инъекции 220 и значка задержки фазы 226 для второй фазы, показанных на экране 210 на Фигуре 10, представлена только в первом цвете 230; а оставшиеся значки из значка приводного плунжера 216, значка общей скорости потока 218, значка общего объема инъекции 220, и значка задержки фазы 226 для второй фазы, показанные на экране 210 на Фигуре 10, представлены только во втором цвете 232. Количество первого цвета 230 и количество второго цвета 232, включенные в каждое графическое изображение, соответствуют (например, пропорционально) концентрации. В варианте осуществления, показанном на Фигуре 10, где концентрация 70% запрограммирована для второй фазы, 70% от каждого из значка приводного плунжера 216, значка общей скорости потока 218, значка общего объема инъекции 220, и значка задержки фазы 226 представлены в первом цвете 230; и 30% из значка приводного плунжера 216, значка общей скорости потока 218, значка общего объема инъекции 220, и значка задержки фазы 226 представлены во втором цвете 232.
Значок концентрации 224, показанный на Фигуре 10, фактически представлен в третьем цвете 234 (например, бежевом). Он может применяться, чтобы сообщить пользователю о том, что концентрация частной фазы в настоящее время программируется. Когда программирование концентрации для частной фазы завершается, значок концентрации 224 может быть представлен в том же виде, что и другие значки концентрации в ту же самую фазу. В этом отношении и обращаясь к Фигуре 11, 70% кнопки концентрации 224 для второй фазы протокола инъекции представлено в первом цвете 230, а 30% кнопки концентрации для этой второй фазы представлено во втором цвете 232. Когда программирование протокола инъекции завершается, ползунок 228 с экрана 210 на Фигуре 10 больше не появляется на экране 240 на Фигуре 11.
Значок концентрирования 224, показанный на экране 240 Фигуры 11, численно отображает программируемую концентрацию (т.е. 70%), и далее графически отображает программируемую концентрацию путем корреляции количеств первого цвета 230 и второго цвета 232 в значке концентрации 224 с запрограммированной концентрацией. Другие из значков, представленных на экране 240, могут передавать информацию о двух различных параметрах данной фазы. Например, каждый из значка приводного плунжера 216, значка общей скорости потока 218, значка общего объема инъекции 220, и значка задержки фазы 226 из каждой фазы численно передает значение одного параметра фазы, и графически передает программируемую концентрацию путем корреляции количеств первого цвета и второго цвета 232 в таких значках 216, 218, 220 и 226 с запрограммированной концентрацией. По существу: (1) каждый значок приводного плунжера 216 численно передает информацию о связанном запрограммированном приводном плунжере (A, B или AB), а также графически передает запрограммированную концентрацию путем соотношения количеств первого цвета 230 и второго цвета 232 в соответствующем значке приводного плунжера 216 с запрограммированной концентрацией; (2) каждый значок общей скорости потока 218 численно передает связанную запрограммированную скорость потока, а также графически передает запрограммированную концентрацию путем соотношения количеств первого цвета 230 и второго цвета 232 в соответствующем значке общей скорости потока 218 с запрограммированной концентрацией; (3) каждый значок общего объема инъекции 220 численно передает связанный запрограммированный объем инъекции, а также графически передает запрограммированную концентрацию путем соотношения количеств первого цвета 230 и второго цвета 232 в соответствующем значке общего объема инъекции 220 с запрограммированной концентрацией; и (4) каждый значок задержки фазы 226 численно передает связанную запрограммированную задержку фазы, а также графически передает запрограммированную концентрацию путем соотношения количеств первого цвета 230 и второго цвета 232 в соответствующем значке задержки фазы 226 с запрограммированной концентрацией.
Экраны 210, 240, изображенные на Фигурах 10 и 11, соответственно, могут быть представлены на любом подходящем дисплее 124 системы инъекции медицинской жидкости 450 (Фигуры 3B и 3C), включая дисплей, встроенный в силовую насадку автоматического инжектора (например, на дисплее 434 автоматического инжектора 432 (Фигура 3A)), на удаленной консоли, функционально связанной с автоматическим инжектором, где удаленная консоль и автоматический инжектор являются частью системы инъекции (например, удаленная консоль 404 (Фигура 3A)), на общей консоли, функционально связанной с устройством медицинской визуализации и автоматическим инжектором), или тому подобном.
Фигура 12 является примером экрана 250, который может быть представлен на одном или нескольких дисплеях 124 системы инъекции медицинской жидкости 450, включая удаленную консоль системы инъекции контрастной среды/медицинской жидкости, общую консоль для устройства медицинской визуализации/сканера и автоматического инжектора, или то и другое, но не ограничивается ими. Соответствующие графические изображения с экрана 210 с Фигуры 10 и с экрана 250 с Фигуры 12 обозначены теми же самыми справочными номерами. Протокол инъекции в форме, показанной на экране 250 с Фигуры 12, включает две фазы. Значок фазы 214 в форме «РН1» соответствует фазе 1 отображаемого протокола инъекции на экране 250, значок фазы 214 в форме «РН2» соответствует фазе 2 отображаемого протокола инъекции на экране 250, и так далее.
Имеется ряд дополнительных характеристик, показанных на экране 250 с Фигуры 12. Одной является значок приводного плунжера 216 для фазы 3. Этот конкретный значок приводного плунжера 216 является чистым или пустым, за исключением маленького штриха, чтобы передать информацию о том, что фаза 3 еще не запрограммирована. Этот тип значка приводного плунжера 216 может быть создан сразу после того, как запрограммирована предыдущая фаза, или сразу после того, как началось программирование предыдущей фазы. Первая активация значка приводного плунжера 216 для фазы 3 может переключать его в конфигурацию «A», вторая активация значка приводного плунжера 216 для фазы 3 может переключать его в конфигурацию «B», а третья активация значка приводного плунжера 216 для фазы 3 может переключать его в «AB» конфигурацию.
Другой характеристикой, включенной в экран 250, показанный на Фигуре 12, является отображение объемов двух жидкостей, подлежащих одновременному введению в фазу одновременной инъекции. В связи с этим, фаза 1 протокола инъекции, показанного на Фигуре 12, является фазой одновременной инъекции, которая запрограммирована на введение 70% концентрации первой жидкости 466a и 30% концентрации второй жидкости 466b. Поскольку общий объем инъекции запрограммирован на 100 мл для этой фазы одновременной инъекции (фазы 1) этого частного протокола инъекции (например, указанного на значке общего объема инъекции 220), модуль/логическая схема контроля дисплея 134 может быть сконструирован для численного отображения объема первой жидкости 466a (через значок общего объема инъекции 252) и для численного отображения объема второй жидкости 466b (через значок общего объема инъекции 254), которые подлежат одновременному введению. Значения, связанные со значками 252 и 256 на экране 250, могут быть обеспечены протоколом определения объема инъекции 190 с Фигуры 6.
Графические представления 262 двух шприцев также показаны на экране 250 - одно соответствует стороне A системы инъекции медицинской жидкости 450, а другое соответствует стороне B системы инъекции медицинской жидкости 450. Значок обозначения стороны A (а также емкости соответствующего шприца - 125 мл в иллюстрированном варианте осуществления) может быть представлен в первом цвете 230 (поскольку он связан с первой жидкостью 466a). Значок обозначения стороны B (а также емкости соответствующего шприца - 200 мл в иллюстрированном варианте осуществления) может быть представлен во втором цвете 232 (поскольку он связан с первой жидкостью 466b).
Фигура 13 является другим примером экрана 260, который может быть представлен на одном или нескольких дисплеях 124 системы инъекции медицинской жидкости 450, включая удаленную консоль системы инъекции контрастной среды/медицинской жидкости, общую консоль для устройства медицинской визуализации/сканера и автоматического инжектора, или то и другое, но не ограничивается ими. Соответствующие графические изображения с экрана 250 с Фигуры 12 и с экрана 260 с Фигуры 13 обозначены теми же самыми справочными номерами. Фигура 13 иллюстрирует 30% концентрацию для фазы 1 (фазы одновременной инъекции). То есть, фаза 1 протокола инъекции, показанного на Фигуре 13, является фазой одновременной инъекции, запрограммированной на 30% концентрацию первой жидкости 466a и 70% концентрацию второй жидкости 466b. Поскольку общий объем инъекции запрограммирован на 100 мл для этой фазы одновременной инъекции (фазы 1) данного конкретного протокола (например, указанного на значке общего объема инъекции 220), модуль/логическая схема контроля дисплея 134 может быть сконструирован для численного отображения объема первой жидкости 466a (через значок общего объема инъекции 252 - 30 мл в иллюстрированном варианте осуществления) и для численного отображения объема второй жидкости 466b (через значок общего объема инъекции 254 - 70 мл в иллюстрированном варианте осуществления), которые вводят одновременно. Значения, связанные со значками 252 и 256 на экране 260, могут быть обеспечены протоколом определения объема инъекции 190 с Фигуры 6.
Модуль/логическую схему контроля автоматического инжектора 122, включая любой один или несколько модулей/логических схем протокола инъекции 128, модуль/логическую схему определения скорости потока 130, модуль/логическую схему определения объема инъекции 132, модуль/логическую схему контроля дисплея 134, модуль/логическую схему контроля движения приводного плунжера 136, модуль/логическую схему контроля давления 138, вместе с любым одним или несколькими из протоколов, показанных на Фигурах 4-9, можно применять любым подходящим образом, включая подходящее программное обеспечение, программно-аппаратные средства, с применением одной или нескольких платформ, с применением одного или нескольких процессоров, с применением памяти любого подходящего типа, с применением любого единичного компьютера любого подходящего типа или множества компьютеров любого подходящего типа, и связанных любым подходящим образом, или любой их комбинации, но не ограничиваясь ими. Модуль/логическую схему контроля автоматического инжектора 122, включая любой один или несколько из модуля/логической схемы протокола инъекции 128, модуль/логическую схему определения скорости потока 130, модуль/логическую схему определения объема инъекции 132, модуль/логическую схему контроля дисплея 134, модуль/логическую схему контроля движения приводного плунжера 136, модуль/логическую схему контроля давления 138, вместе с любым одним или несколькими из протоколов, показанных на Фигурах 4-9, можно применять в любом отдельном участке или множестве участков, которые соединяются любым подходящим образом (например, через любой подходящий тип сети.
Графическое изображение задержки инъекции и графическое изображение задержки сканирования представлено на экране 250 на Фигуре 12 и на экране 260 на Фигуре 13. «Задержку инъекции» можно охарактеризовать как задержку (обычно в секундах) от времени начала инъекции оператором, до действительного начала инъекции, как описано в запрограммированном протоколе инъекции. «Задержку сканирования» можно охарактеризовать как задержку (обычно в секундах) от времени начала инъекции оператором до начала появления изображения операций на устройстве визуализации. В любом случае, активация графического изображения задержки инъекции и графического изображения задержки сканирования обеспечивает программирование соответствующих задержек для протокола инъекции. Текущие запрограммированные значения для задержки инъекции («0» в иллюстрированном варианте осуществления, и который может быть по умолчанию») могут отображаться на соответствующих графических изображениях. Один или несколько установочных экранов могут быть представлены на одном или нескольких дисплеях 124 системы инъекции медицинской жидкости 450, и это позволяет обеспечить вариант представления графического изображения задержки инъекции, графического изображения задержки сканирования, или того и другого на экране при программировании протокола инъекции, и/или при выполнении протокола инъекции с применением системы инъекции медицинской жидкости 450.
Предшествующее описание настоящего изобретения представлено с целью иллюстрации и характеристики. Далее того, описание не предназначено для ограничения изобретения формой, описанной в настоящем описании. Соответственно, вариации и модификации, соответствующие вышеприведенным идеям, и навыки и знания в соответствующей области техники, находятся в пределах объема настоящего изобретения. Кроме того, варианты осуществления, описанные выше, предназначаются для разъяснения наилучших способов осуществления изобретения и для того, чтобы позволить другим специалистам в данной области техники применить изобретение как таковое, или другие варианты осуществления и с различными модификациями, необходимыми для частного приложения(ий) или применения(ий) настоящего изобретения. Подразумевается, что формула изобретения включает такие альтернативные варианты осуществления до степени, позволенной предшествующим уровнем техники.
Реферат
Группа изобретений относится к медицинской технике, а именно к системам, используемым для инъекции одной или нескольких медицинских жидкостей объекту, такому как пациент. Система инъекции медицинской жидкости содержит приводной механизм поршня шприца, включающий источник управления и приводной плунжер, и логическую схему контроля движения приводного плунжера. Источник управления выполнен с возможностью продвижения приводного плунжера в направлении выпуска жидкости, вызывающего выпуск медицинской жидкости из шприца, вставленного в указанную систему инъекции медицинской жидкости. Логическая схема контроля сконфигурирована для осуществления повышения скорости приводного плунжера на основании заданного давления. Заданное давление связано с продвижением приводного плунжера в направлении выпуска жидкости и является независимой переменной. Во втором варианте выполнения системы инъекции медицинской жидкости логическая схема контроля движения приводного плунжера сконфигурирована для итеративного получения скорости приводного плунжера от начала по меньшей мере одной фазы протокола инъекции и в течение по меньшей мере части по меньшей мере одной фазы. Каждое получение скорости основано на разнице между заданным давлением и наблюдаемым давлением, и заданное давление является независимой переменной. В третьем варианте выполнения система инъекции медицинской жидкости содержит логическую схему контроля давления, сконфигурированную для получения наблюдаемого давления на основании подаваемой мощности на источник управления и скорости приводного плунжера. Наблюдаемое давление связано с
Комментарии