Сегментация крупных объектов из нескольких трехмерных видов - RU2663649C2
Код документа: RU2663649C2
Чертежи








Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к формированию трехмерных ультразвуковых изображений. В частности, настоящее изобретение относится к обработке изображений и сегментации объектов в отсканированном объеме.
Уровень техники
При формировании трехмерных ультразвуковых изображений или формировании изображений объема, получение трехмерного изображения может выполняться по-разному согласно зонду. Например, с использованием зонда xMatrix, например, X6-1 Philips, может выполняться подлинное трехмерное получение. С использованием механического зонда, например, V6-2 Philips, трехмерный объем получается из получения нескольких двумерных срезов, калибровка которых активируется механически. С использованием двумерного зонда, трехмерный объем выполняется посредством проведения множества двумерных сканирований, которые проводят срез через исследуемую зону. Следовательно, получается множество двумерных изображений, которые находятся рядом друг с другом. Дополнительно, посредством надлежащей обработки изображений, трехмерное изображение исследуемой зоны может компоноваться из множества двумерных изображений. Во всех вышеупомянутых случаях, трехмерная информация отображается в надлежащей форме на дисплее для пользователя ультразвуковой системы.
Дополнительно, так называемое живое формирование трехмерных изображений или формирование четырехмерных изображений зачастую используется в клинических вариантах применения. При живом формировании трехмерных изображений, может получаться вид в реальном времени для объема, позволяющий пользователю просматривать подвижные части анатомического участка, например, бьющегося сердца и т.п. В клиническом варианте применения живого формирования трехмерных изображений, иногда существует потребность формировать изображение относительно небольшой области сердца, к примеру, одного клапана или септального дефекта, и иногда существует потребность формировать изображение большой области сердца, к примеру, всего желудочка.
Сегментация двумерных изображений является общей задачей для радиологов. Сегментация изображений трехмерных объектов зачастую выполняется из нескольких многоярусных двумерных сегментаций. Сегментация изображений в трех измерениях является менее общей. Извлеченная поверхность может использоваться либо для того, чтобы определять количественно объем органа или опухоли, либо в качестве ориентира для того, чтобы выполнять совмещение изображений на основе признаков. Тем не менее зачастую трудоемко вручную сегментировать орган в трехмерном изображении. Хотя инструментальные средства квантификации и визуализации относительно доступны для двумерных изображений, анализ трехмерных объемов зачастую выполняется вручную через трудоемкие операции, сложные для реализации в клинической практике. Следовательно, такие способы являются довольно неудобными. Автоматически проведенные и точные сегментации, следовательно, требуются, но являются сложными для получения, в частности, в ультразвуковых изображениях, которые повреждаются посредством большого количества шума и различных артефактов.
Документ US 2008/0139938 показывает систему для получения, обработки и представления границ границы раздела полости и тканей в исследуемой области в ультразвуковом изображении на основе интенсивности сигналов ультразвуковых эхо-сигналов, возвращаемых из структур в исследуемой области (ROI). Сегментация границ форм полости, занимающих исследуемую область, использует анализ на основе функции затрат для пикселных наборов, занимающих границу раздела полости и тканей. Сегментированные формы представляют собой дополнительное изображение, обработанное таким образом, чтобы определять области и объемы органа или структуру, содержащую полость в исследуемой области.
Дополнительно, ультразвук представляет собой главную используемую модальность, в частности, во время минимально инвазивных вмешательств, например, в печени, поскольку он является безопасным для пациента. Ультразвуковые изображения не предоставляют идентичную медицинскую информацию по сравнению с, например, модальностью компьютерной томографии (CT) или магнитного резонанса (MR). Все эти модальности дополняют друг друга при предоставлении всесторонних видов внутренней части тела. Тем не менее ультразвуки могут иметь сложность с визуализацией между ребрами, поскольку ребра отбрасывают тень, скрывающую информацию. Кроме того, ультразвуковые изображения имеют ограниченное поле зрения по сравнению с компьютерной томографией или магнитно-резонансной томографией. Задача сводится к тому, чтобы совмещать данные компьютерной томографии или магнитно-резонансной томографии объекта в человеческом теле с данными ультразвуковых изображений. CT или MR обычно получаются до использования ультразвука и содержат точную информацию в отношении, например, формы и местоположения опухоли. Во время использования формирования ультразвуковых изображений, требуется всегда хранить данные с примечаниями, например, по форме и местоположению опухоли, полученные через CT и/или MR, совмещенные с ультразвуковыми данными.
Дополнительно, даже если дополнительные модальности не используются, ультразвуковые изображения могут получаться из различных точек наблюдения. Следовательно, дополнительная задача заключается в том, чтобы совмещать несколько ультразвуковых изображений между собой.
Существует потребность в улучшенных автоматических или, по меньшей мере, автоматизированных инструментальных средствах сегментации и совмещения.
Сущность изобретения
Цель изобретения заключается в том, чтобы предоставлять ультразвуковую систему формирования изображения для обследования объекта в объеме, которая является более удобной в калибровке и позволяет отображать сегментированные ультразвуковые изображения, совмещенные между собой, или любые альтернативные эталоны, например, изображение, снятое через другую модальность.
В первом аспекте настоящего изобретения, представлена ультразвуковая система формирования изображения для обследования объекта в объеме, которая содержит зонд получения ультразвуковых изображений для получения трехмерных ультразвуковых изображений и предоставления или вывода данных трехмерных ультразвуковых изображений, содержащий отслеживающее устройство для отслеживания положения зонда получения ультразвуковых изображений и предоставления положения точки наблюдения трехмерных ультразвуковых изображений и процессор изображений, выполненный с возможностью принимать данные трехмерных ультразвуковых изображений и предоставлять данные отображения, при этом процессор изображений выполнен с возможностью принимать множество трехмерных ультразвуковых изображений и их соответствующих положений точки наблюдения и проводить сегментацию объектов одновременно из множества трехмерных ультразвуковых изображений.
В дополнительном аспекте настоящего изобретения, представлен способ для предоставления ультразвукового изображения объекта в объеме, при этом способ содержит этапы предоставления, в частности, получения данных ультразвуковых изображений объема, содержащих множество трехмерных ультразвуковых изображений и положения точки наблюдения каждого трехмерные ультразвуковые изображения, обработки данных ультразвуковых изображений таким образом, чтобы сегментировать и совмещать объекты одновременно из первого ультразвукового изображения и, по меньшей мере, одного дополнительного ультразвукового изображения, чтобы предоставлять данные совмещенных и сегментированных ультразвуковых изображений, и отображения ультразвукового изображения на основе данных совмещенных и сегментированных ультразвуковых изображений.
В дополнительном аспекте настоящего изобретения, представлена компьютерная программа, содержащая средство программного кода для инструктирования компьютеру выполнять этапы способа для предоставления ультразвукового изображения объекта в объеме, при этом способ содержит этапы предоставления, в частности, получения данных ультразвуковых изображений объема, содержащих множество трехмерных ультразвуковых изображений и положения точки наблюдения каждого ультразвукового изображения, обработки данных ультразвуковых изображений таким образом, чтобы сегментировать и совмещать объекты одновременно из первого ультразвукового изображения и, по меньшей мере, одного дополнительного ультразвукового изображения, чтобы предоставлять данные совмещенных и сегментированных ультразвуковых изображений, и отображения ультразвукового изображения на основе данных совмещенных и сегментированных ультразвуковых изображений, когда упомянутая компьютерная программа выполняется в компьютере.
Базовая идея изобретения заключается в том, чтобы использовать отслеживающее устройство, в частности, электромагнитное отслеживающее устройство, для того чтобы упрощать совмещение и косегментацию ультразвуковых изображений. Через положения точки наблюдения, ассоциированные с каждым ультразвуковым изображением и отслеживаемые с помощью отслеживающего устройства, можно примерно инициализировать область поиска совмещения. Дополнительные точные результаты, обнаруженные через косегментацию и совмещение, могут использоваться для того, чтобы точно калибровать отслеживающее устройство.
Посредством этого, дополнительно упрощается поддержание ультразвуковых изображений совмещенными в ранее полученном трехмерном изображении идентичного объема, например, в компьютерно-томографическом изображении (CT) или магнитно-резонансном (MR) изображении, совмещенном с ультразвуковыми данными. Чтобы обеспечивать это, отслеживающее устройство присоединено к зонду получения ультразвуковых изображений, выступающему в качестве типа глобальной системы позиционирования (GPS) для ультразвукового вида. После того, как отслеживающее устройство калибруется, в частности, на предмет эталона, например, объема CT, последующее ультразвуковое получение объема совмещается с объемом CT.
Калибровка отслеживающего устройства, в частности, электромагнитного отслеживающего устройства, в общем, может выполняться различными способами, например, могут использоваться реперные точки, расположенные на груди пациента. Дополнительно, может использоваться ручное совмещение, находящее характерные признаки (ориентиры) в CT или MR-виды в ультразвуковых видах. Конечно, технологии на основе обработки изображений, которые автоматически идентифицируют либо ориентиры (например, сосуды печени), присутствующие как в CT-, так и в ультразвуковых видах, либо поверхности форм, могут использоваться для того, чтобы совмещать изображения. Тем не менее, помимо этого, настоящее изобретение предлагает дополнительные процессы калибровки.
Это обусловлено тем, что ориентиры, такие как сосуды печени, не могут всегда визуализироваться в CT-данных, если не выполнена инъекция контрастного средства. Следовательно, технологии на основе ориентиров задают некоторые ограничения для CT-данных. Совмещение с использованием размещенных реперных точек, например, на груди пациента, не может всегда реализовываться по различным причинам. Например, этот тип совмещения и калибровки требует, чтобы реперные точки оставались на месте во время этого CT-сканирования и во время дополнительного ультразвукового получения. Тем не менее это накладывает ограничения на время между получением CT-изображений (или получение MR-изображений) и получением ультразвуковой системы формирования изображения. Дополнительно, некоторые объекты или органы могут быть слишком крупными для захвата полностью с использованием зондов получения ультразвуковых изображений. Затем сопоставление поднабора соответствующего органа может не предоставлять точное совмещение на всей поверхности. Кроме того, ультразвуковой объем может быть серьезно ухудшен вследствие теневых эффектов, внутренне присущих эхографии. Дополнительно, также сегментация органа, к примеру, печени может очень точно извлекаться, например, из CT-данных. Тем не менее этот результат не может обязательно согласовывать соответствующую форму и объем пациента во время ультразвукового получения. Пациент, возможно, изменяет свою позу, и/или пациент может представлять фазу дыхательного цикла, отличную от фазы во время получения CT. Тем не менее за счет устройства получения ультразвукового изображения согласно настоящему изобретению, может предоставляться решение для сегментации и точного совмещения, устойчивое к ультразвуковым артефактам и очень точное. Дополнительно, предложенное изобретение подходит для различных поз пациента и фаз дыхательного цикла. Наконец, также можно удобно решать проблемы, связанные с крупными органами, такими как печень.
Следовательно, по существу, настоящее изобретение предлагает систему отслеживания положения, например, электромагнитное (EM) отслеживающее устройство, присоединенное к ультразвуковому зонду получения. Данные из отслеживающего устройства обрабатываются и учитываются посредством процессора изображений при обработке данных изображений, предоставленных посредством зонда получения ультразвуковых изображений. Следовательно, получение множества ультразвуковых изображений с различным положением точки наблюдения, которое также записывается посредством отслеживающего устройства, может обрабатываться посредством системы получения ультразвукового изображения. Сегментация объекта и совмещение множества ультразвуковых изображений может проводиться через процесс совмещения и косегментации на основе модели.
Предпочтительные варианты осуществления изобретения задаются в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ имеет аналогичные и/или идентичные предпочтительные варианты осуществления, как и заявленное устройство, и задается в зависимых пунктах формулы изобретения.
В варианте осуществления ультразвуковой системы формирования изображения, процессор изображений выполнен с возможностью проводить сегментацию посредством минимизации энергетической составляющей таким образом, что деформированная первоначальная геометрическая форма совпадает с границей объекта максимально возможно хорошо.
Обнаружено, что способ на основе модели с использованием ранее указанной первоначальной геометрической формы, которая преобразована во время процесса сегментации, предоставляет надежный способ со сведением для того, чтобы обнаруживать и сегментировать объект во всех ультразвуковых изображениях одновременно. Как подробнее поясняется ниже, сегментация содержит деформацию первоначальной модели, например, первоначальной модели, которая примерно представляет форму целевого объекта. В дополнительном варианте осуществления, энергетическая составляющая содержит первую составляющую, представляющую первое трехмерное ультразвуковое изображение и, по меньшей мере, одну дополнительную, представляющую дополнительное трехмерное ультразвуковое изображение, при этом деформированная первоначальная геометрическая форма является идентичной как в первой, так и, по меньшей мере, в одной дополнительной составляющей, и при этом составляющие верности данных, по меньшей мере, одной из первой, и, по меньшей мере, одной дополнительной составляющей содержат совмещающее преобразование, совмещающее трехмерное ультразвуковое изображение и, по меньшей мере, одно трехмерное ультразвуковое изображение.
Первое и, по меньшей мере, одно дополнительное ультразвуковое изображение могут быть совмещены относительно общего эталона. Общий эталон, например, может представлять собой одно из ультразвуковых изображений, например, первое ультразвуковое изображение или возможно трехмерное изображение, полученное через другую модальность, например, через CT или MR. Конечно, общий эталон также может представлять собой любое положение в общей системе координат. Важно в итоге знать все положения относительно друг друга. Посредством этого, при сегментации объекта из данных трехмерных ультразвуковых изображений, одновременно может быть обнаружено совмещающее преобразование. Нет необходимости точно предварительно совмещать данные трехмерных ультразвуковых изображений и, по меньшей мере, одни дополнительные данные трехмерных ультразвуковых изображений до сегментации. Наоборот, совмещение этих, по меньшей мере, двух наборов данных изображений выполняется одновременно с сегментацией. Геометрическое преобразование, которое совмещает их, следовательно, доступно в качестве побочного результата. Это позволяет совмещать множество данных трехмерных ультразвуковых изображений и предоставлять совмещенные изображения ультразвуковой системы формирования изображения одновременно.
В дополнительном варианте осуществления, деформация первоначальной геометрической формы проводится посредством применения глобального преобразования и нестрогого локального преобразования на первоначальной геометрической форме, в частности, при этом глобальное преобразование перемещает в пространстве, вращает и масштабирует первоначальную геометрическую форму, и при этом нестрогое локальное преобразование применяет поле смещения к первоначальной геометрической форме.
В частности, поле смещения может иметь возрастание плавности. Дополнительно, энергетическая составляющая дополнительно может содержать третью составляющую, ограничивающую нестрогое локальное преобразование. Эта конструкция энергетической составляющей обеспечивает такое преимущество, что деформация первоначальной геометрической формы, которая примерно соответствует объекту, который должен быть сегментирован, не может деформироваться слишком сильно во время преобразования. Это достигается посредством разделения деформации первоначальной геометрической формы на глобального преобразование, перемещающее в пространстве и вращающее и масштабирующее первоначальную геометрическую форму, и отдельное локальное преобразование, которое деформирует первоначальную геометрическую форму. Посредством этого, способ дополнительно может применять третью составляющую, штрафующую локальное преобразование таким образом, что форма объекта слишком сильно не отклоняется от первоначальной геометрической формы. Посредством этого, сегментации, которые находятся близко к первоначальной геометрической форме, являются предпочтительными посредством процесса.
В дополнительном варианте осуществления, процессор изображений выполнен с возможностью определять первоначальную геометрическую форму на основе сегментации объекта в данных трехмерных изображений, полученных через другую модальность, например, компьютерную томографию.
Посредством этого, другая модальность, например, CT может использоваться для того, чтобы точно обнаруживать и сегментировать объект, в частности, если он является крупным, и использовать эту сегментированную форму в качестве первоначальной геометрической формы во время ультразвуковой сегментации и совмещения.
В дополнительном варианте осуществления, процессор изображений выполнен с возможностью принимать первоначальную геометрическую форму в качестве задания пользователя.
Следовательно, не предоставляется то, что пользователь задает базовую геометрическую бывшую первоначальную геометрическую форму, например, эллипсоид или сферу, в случае если объект, который должен быть сегментирован, представляет собой печень. Конечно, также могут использоваться другие базовые геометрические формы, такие как цилиндры или средние формы (например, средняя форма печени).
В дополнительном варианте осуществления, процессор изображений выполнен с возможностью определять совмещающее преобразование для каждого трехмерного ультразвукового изображения относительно общего эталона, например, данных трехмерных изображений, полученных через другую модальность, или одного из множества трехмерных ультразвуковых изображений.
Посредством этого, например, во время вмешательства под управлением системы получения ультразвукового изображения, совмещенные изображения могут быть представлены пользователю, например, с помощью расположенного рядом вида относительно объекта, полученного через другую модальность, например, CT или MR.
В дополнительном варианте осуществления, процессор изображений дополнительно выполнен с возможностью проводить сегментацию на основе инициализации области поиска совмещения, при этом инициализация области поиска совмещения проводится посредством приблизительного позиционирования первоначальной геометрической формы в каждом из трехмерных ультразвуковых изображений посредством минимизации энергетической составляющей таким образом, что первоначальная геометрическая форма совпадает с границей объекта в трехмерном ультразвуковом изображении максимально возможно хорошо.
Посредством этой инициализации, может быть значительно уменьшена область поиска для совмещения. В качестве приблизительной оценки, может предоставляться не только первоначальная геометрическая форма объекта, но также и положение точки наблюдения, из которого получено ультразвуковое изображение. Поиск оптимизации энергетической составляющей выполняется только вокруг этих первоначальных положений.
В дополнительном варианте осуществления, энергетическая составляющая минимизируется посредством оптимизации просто трехмерного сдвигового преобразования и учета положения точки наблюдения зонда получения ультразвуковых изображений при получении соответствующего трехмерного изображения, и при этом учитывается калибровка трехмерной ориентации зонда для обнаружения изображений, отслеживаемого посредством отслеживающего устройства.
Посредством этого, поток обработки перед калибровкой может сначала проводиться, чтобы предоставлять первоначальную информацию позиционирования. Например, он состоит в получении и записи двух отслеживающих положений через электромагнитное (EM) отслеживающее устройство, примерно позиционированное на грудине пациента, и предоставлении демаскирующего признака на краниокаудальной оси пациента. Затем автоматическая инициализация области поиска совмещения может проводиться на основе сведений этого потока обработки перед калибровкой.
Посредством этого, инициализация легко ускоряется. Поскольку должен выполняться поиск только сдвигового преобразования, поскольку положения точки наблюдения, полученные с помощью отслеживающего устройства, могут учитываться, инициализация может получаться очень быстро. Дополнительно, при контакте только с частично полученными объектами, косегментация и совмещение может быть инициализирована очень надежным способом.
В дополнительном варианте осуществления, ультразвуковая система формирования изображения дополнительно выполнена с возможностью обеспечивать запросную детализацию сегментации и совмещающего преобразования посредством использования другого множества трехмерных ультразвуковых изображений, полученных через зонд получения ультразвуковых изображений, и уже проведенной инициализации.
Во время детализации осуществляется получение, по меньшей мере, одного ультразвукового объема объекта. Затем снова сегментация и локализация ультразвуковых изображений проводится на основе процесса совмещения и косегментации на основе модели. Тем не менее используется ранее проведенная инициализация.
В дополнительном варианте осуществления, ультразвуковая система формирования изображения содержит отслеживающее устройство, которое представляет собой электромагнитное отслеживающее устройство.
Посредством этого, может использоваться технология электромагнитной навигации и отслеживания, которая не имеет побочных требований и использует датчики очень небольшого размера, которые являются, в частности, полезными для интеграции в небольших устройствах, таких как зонды.
В дополнительном варианте осуществления способа, способ содержит дополнительный этап предоставления, в частности, получения трехмерного изображения объекта объема, полученного с использованием другой модальности до этапа предоставления данных ультразвуковых изображений в качестве ввода.
Как уже пояснено выше, трехмерное изображение объекта, полученное с использованием другой модальности, может использоваться для того, чтобы сегментировать объект, в частности, в случае очень крупного объекта, полностью из изображения, полученного с использованием другой модальности, чтобы получать первоначальную геометрическую форму, и использоваться для того, чтобы инициализировать процесс сегментации в ультразвуковых изображениях.
В дополнительном варианте осуществления, способ содержит первый этап калибровки отслеживающего устройства для получения положений точки наблюдения посредством перемещения зонда для обнаружения изображений, по меньшей мере, в два различных местоположения на известной оси или ориентации зонда в предварительно заданной взаимосвязи, т.е. параллельно или перпендикулярно известной оси, например, краниокаудальной оси пациента.
В конкретном варианте осуществления, настоящее изобретение может использоваться с электромагнитным отслеживающим устройством и во время минимально инвазивного вмешательства. Следовательно, эхографическая система или ультразвуковая система, оснащенная следящим датчиком, извлекает выгоду из этого конкретного изобретения. Настоящее изобретение может использоваться в системе, в которой форма объекта фактически известна из ранее проведенной сегментации в изображениях, полученных для другой модальности. Тем не менее изобретение также направлено на косовмещение и сегментацию целевого объекта, для которого предоставлена приблизительная оценка формы объекта, например, просто сферы или средней формы. Тем не менее изобретение также находит применение только в таких ультразвуковых системах, которые оснащены отслеживающим устройством и для которых, тем не менее недоступны CT или MR. Для этой заявки, изобретение нацелено на сегмент объекта в нескольких ультразвуковых изображениях с различными положениями точки наблюдения.
В дополнительном варианте осуществления, процессор изображений дополнительно сконфигурирован таким образом, что совмещающее преобразование является аффинным.
Обычно, совмещающее преобразование, применяемое в одной из первой и второй составляющей для энергетической составляющей, или, другими словами, в составляющих подобия данных энергии, может представлять собой строгие преобразования или нестрогие преобразования. Совмещающее преобразование может представлять собой любой тип глобального линейного преобразования. В частности, оно может представлять собой аффинное преобразование. Аффинное преобразование представляет собой преобразование, которое сохраняет прямые линии и соотношения расстояний между точками, находящимися на прямой линии. Аффинное преобразование является эквивалентным линейному преобразованию, после которого выполняется сдвиг. В частности, аффинное преобразование может представлять собой линейное преобразование максимум с двенадцатью параметрами.
Тем не менее следует подчеркнуть, что предлагаемая система и способы также могут применяться к обследованию любого другого органа пациента или объекта внутри пациента. Другие подходящие базовые геометрические формы также могут быть обнаружены для селезенки, кишки, поджелудочной железы, печени или сердца пациента. Дополнительно, аорта может представлять собой объект, который может быть обследован через предлагаемые системы и способы. Для аорты, продолговатый цилиндр может представлять собой базовую геометрическую форму.
В дополнительном варианте осуществления, ультразвуковая система формирования изображения дополнительно содержит матрицу измерительных преобразователей, выполненную с возможностью предоставления ультразвукового приемного сигнала, формирователь диаграммы направленности антенны, выполненный с возможностью управлять матрицей измерительных преобразователей таким образом, чтобы сканировать объем, и дополнительно выполненный с возможностью принимать ультразвуковой приемный сигнал и предоставлять сигнал изображения, контроллер для управления формирователем диаграммы направленности антенны и процессор сигналов, выполненный с возможностью принимать сигнал изображения и предоставлять данные трехмерных изображений и данные трехмерных изображений с повышенной контрастностью.
Посредством этого, предоставляется полнофункциональная ультразвуковая система формирования изображения, допускающая получение нескольких трехмерных изображений и их предоставление в процессор изображений и предоставляющая их в процессор изображений. Данные трехмерных изображений с повышенной контрастностью затем могут использоваться в качестве данных другой модальности, чтобы поддерживать сегментацию и совмещение.
Краткое описание чертежей
Эти и другие аспекты изобретения должны становиться очевидными и истолковываться со ссылкой на вариант(ы) осуществления, описанные ниже в данном документе. На следующих чертежах:
Фиг. 1 показывает общее представление системы ультразвукового изображения,
Фиг. 2 показывает блок-схему, показывающую существенные элементы ультразвуковой системы,
Фиг. 3 показывает схематичный чертеж для пояснения объема получения,
Фиг. 4 показывает блок-схему для того, чтобы иллюстрировать процесс косегментации и совмещения,
Фиг. 5a в 5c показывают примеры для того, чтобы пояснять преобразования, проведенные на первоначальной геометрической форме во время сегментации,
Фиг. 6 показывает дополнительную блок-схему, иллюстрирующую вариант осуществления всего процесса получения изображений,
Фиг. 7 показывает новую схематичную иллюстрацию релевантной оси и положений на пациенте во время получения изображений,
Фиг. 8 показывает блок-схему варианта осуществления способа, и
Фиг. 9a-9d показывают примеры изображения для того, чтобы пояснять непрерывное получение изображений.
Подробное описание изобретения
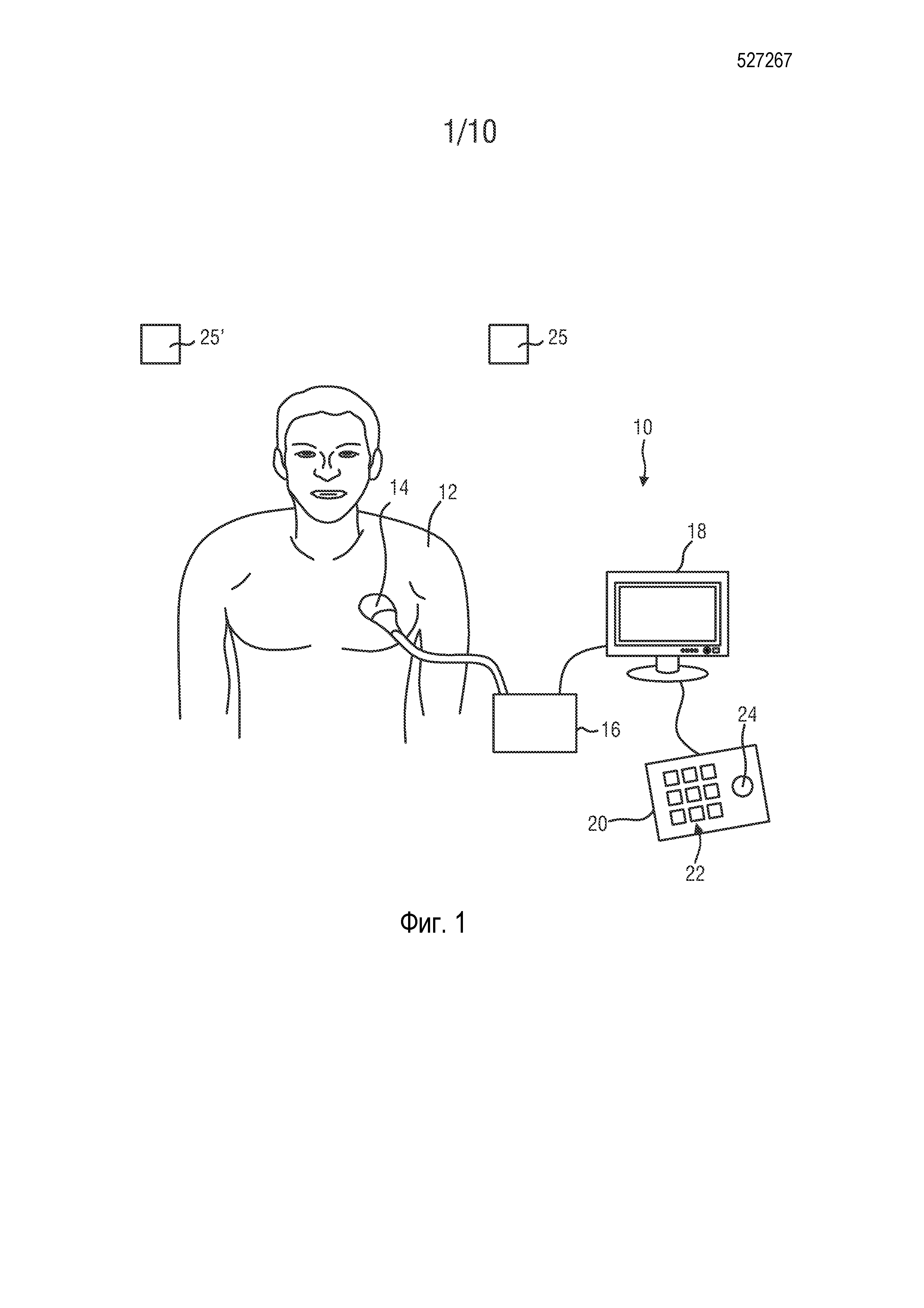
Фиг. 1 показывает схематичную иллюстрацию ультразвуковой системы 10 согласно варианту осуществления, в частности, медицинской ультразвуковой системы формирования трехмерных изображений. Ультразвуковая 10 система формирования изображения применяется для того, чтобы обследовать объем анатомического участка, в частности, анатомического участка пациента 12. Ультразвуковая система 10 содержит зонд 14 получения ультразвуковых изображений, имеющий, по меньшей мере, одну матрицу измерительных преобразователей, имеющую множество элементов измерительного преобразователя для передачи и/или приема ультразвуковых волн. В одном примере, элементы измерительного преобразователя могут передавать ультразвуковые волны в форме, по меньшей мере, одного импульса передачи конкретной длительности импульса, в частности, множество последующих передаваемых импульсов. Элементы измерительного преобразователя, например, могут размещаться в одномерном ряду, например, для предоставления двумерного изображения, которое может перемещаться или поворачиваться вокруг оси механически. Дополнительно, элементы измерительного преобразователя могут размещаться в двумерной матрице, в частности, для предоставления многоплоскостного или трехмерного изображения.
В общем, множество двумерных изображений, каждое из которых находится вдоль конкретной акустической линии или линии сканирования, в частности линии приема сканирования, может получаться тремя различными способами. Во-первых, пользователь может добиваться множества изображений через ручное сканирование. В этом случае, зонд получения ультразвуковых изображений может содержать измерительные устройства положения, которые могут отслеживать местоположение и ориентацию линий сканирования или плоскостей сканирования. Тем не менее это в данный момент не рассматривается. Во-вторых, измерительный преобразователь может быть автоматически механически сканирован в зонде получения ультразвуковых изображений. Это может иметь место, если используется одномерная матрица измерительных преобразователей. В третьих и предпочтительно, фазированная двумерная матрица измерительных преобразователей расположена в зонде получения ультразвуковых изображений, и ультразвуковые пучки электронно сканируются. Зонд получения ультразвуковых изображений может носиться в кармане пользователем системы, например, медицинским работником или доктором. Зонд 14 получения ультразвуковых изображений применяется к телу пациента 12, так что предоставляется изображение анатомического участка у пациента 12.
Дополнительно, ультразвуковая система 10 имеет модуль 16 управления, который управляет предоставлением трехмерного изображения через ультразвуковую систему 10. Как подробнее поясняется ниже, модуль 16 управления управляет не только получением данных через матрицу измерительных преобразователей зонда 14 получения ультразвуковых изображений, но также и обработкой сигналов и изображений, которые формируют трехмерные изображения из эха ультразвуковых пучков, принимаемых посредством матрицы измерительных преобразователей зонда 14 получения ультразвуковых изображений.
Ультразвуковая система 10 дополнительно содержит дисплей 18 для отображения трехмерных изображений пользователю. Дополнительно, предоставляется устройство 20 ввода, которое может содержать клавиши или клавиатуру 22 и дополнительные устройства ввода, например, шаровой манипулятор 24. Устройство 20 ввода может соединяться с дисплеем 18 или непосредственно с модулем 16 управления.
Дополнительно, ультразвуковая система 10 содержит отслеживающее устройство, например, электромагнитное отслеживающее устройство. Части отслеживающего устройства расположены в зонде 14 или могут быть ассоциированы с зондом через фиксатор. Дополнительные части 25, 25', например, датчики, такие как магниторезистивные датчики, могут быть размещены по периметру ультразвуковой системы. Предпочтительно, пространственные координаты дополнительных частей 25, 25' известны.
Фиг. 2 показывает принципиальную блок-схему ультразвуковой системы 10. Как уже изложено выше, ультразвуковая система 10 содержит зонд 14 (PR) получения ультразвуковых изображений, модуль 16 управления (CU), дисплей (DI) 18 и устройство 20 ввода (ID). Как подробнее изложено выше, зонд 14 (PR) содержит матрицу 26 измерительных преобразователей, например, фазированную двумерную матрицу измерительных преобразователей или одномерную матрицу измерительных преобразователей с автоматическим сканированием. Дополнительно, зонд содержит часть 27 отслеживающего устройства, например, катушку, которая формирует электромагнитное поле, которое считывается через датчики 25, 25'. В общем, модуль 16 управления (CU) может содержать центральный процессор, который может включать в себя аналоговые и/или цифровые электронные схемы, процессор, микропроцессор и т.п., чтобы полностью координировать получение и предоставление изображений. Дополнительно, модуль 16 управления содержит в данном документе центральный процессор 28. Тем не менее следует понимать, что центральный процессор 28 не должен обязательно представлять собой отдельный объект или модуль в ультразвуковой системе 10. Он может быть частью модуля 16 управления и, в общем, аппаратно или программно реализован. Текущее различие проводится только в качестве иллюстрации. Центральный процессор 28 (CPU) в качестве части модуля 16 управления может управлять формирователем диаграммы направленности антенны и за счет этого тем, какие изображения объема 32 снимаются, и как эти изображения снимаются. Формирователь 30 диаграммы направленности антенны (BF) формирует напряжения, которые активируют матрицу 26 измерительных преобразователей (TR), определяет частоты повторения частей, он может сканировать, фокусировать и аподизировать передаваемый пучок и принимаемый или приемный пучок(ки) и дополнительно может усиливать фильтр и оцифровать поток напряжения эха, возвращаемый посредством матрицы 26 измерительных преобразователей. Дополнительно, центральный процессор 28 модуля 16 управления может определять общие стратегии сканирования. Такие общие стратегии могут включать в себя требуемую долю получения объема, поперечную протяженность объема, протяженность подъема объема, максимальные и минимальные плотности линий, времена линий сканирования и плотность линии, как уже пояснено выше. Формирователь 30 диаграммы направленности антенны дополнительно принимает ультразвуковые сигналы из матрицы 26 измерительных преобразователей и перенаправляет их в качестве сигналов изображений.
Дополнительно, ультразвуковая система 10 содержит процессор 34 сигналов (SP), который принимает сигналы изображений. Процессор 34 сигналов, в общем, предоставляется для аналого-цифрового преобразования, цифровой фильтрации, например, полосовой фильтрации, а также определения и сжатия, например, уменьшения динамического диапазона, принимаемых ультразвуковых эхо-сигналов или сигналов изображений. Процессор сигналов перенаправляет данные изображений.
Дополнительно, ультразвуковая система 10 содержит процессор 36 изображений (IP), который преобразует данные изображений, принятые из процессора 34 сигналов, в данные отображения, в итоге показанные на дисплее 18. В частности, процессор 36 изображений принимает данные изображений, предварительно обрабатывает данные изображений и может сохранять их в запоминающем устройстве изображений. Эти данные изображений затем дополнительно постобрабатываются, чтобы предоставлять изображения, наиболее удобные для пользователя, через дисплей 18. В текущем случае, в частности, процессор 36 изображений может формировать трехмерные изображения из множества двумерных изображений в каждом срезе.
Пользовательский интерфейс, в общем, иллюстрируется с помощью ссылки с номером 38 и содержит дисплей 18 и устройство 20 ввода. Он также может содержать дополнительные устройства ввода, например, мышь или дополнительные кнопки, которые могут даже предоставляться на самом зонде 14 получения ультразвуковых изображений.
Конкретным примером для трехмерной ультразвуковой системы, которая может применять настоящее изобретение, является ультразвуковая система CX32 CompactXtreme, реализуемая заявителем, в частности, вместе с измерительным преобразователем X6-1 или X7-2t TEE заявителя или другим измерительным преобразователем с использованием технологии xMATRIX заявителя. В общем, системы на основе матричных измерительных преобразователей, предоставляемые в системах Philips iE33, или технология механического трехмерного/четырехмерного измерительного преобразователя, предоставляемая, например, в системах Philips iU22 и HD15, могут применять настоящее изобретение.
Фиг. 3 показывает пример объема 32 относительно зонда 14 получения ультразвуковых изображений. Примерный объем 32, проиллюстрированный в этом примере, имеет секторный тип вследствие матрицы измерительных преобразователей зонда 14 получения ультразвуковых изображений, размещаемого в качестве фазированной двумерной антенной решетки с электронным сканированием. Следовательно, размер объема 32 может выражаться посредством угла возвышения 42 и азимутального угла 44. Глубина 46 объема 32 может выражаться посредством так называемого времени линии в секундах в расчете на линию. Оно представляет собой время сканирования, расходуемое на то, чтобы сканировать конкретную линию сканирования.
Объем 32 может быть разделен на множество срезов 48, 50 или двумерных изображений. Только два среза 48, 50 проиллюстрированы в качестве иллюстрации. Фактически, множество срезов 48, 50, имеющих различные углы 40 подъема, распределяются по объему 32. Конечно, срезы 48, 50 также могут быть ориентированы в направлении подъема и распределены по объему 32 в поперечном направлении. Во время получения изображений двумерная матрица измерительных преобразователей зонда 14 получения ультразвуковых изображений управляется посредством формирователя диаграммы направленности антенны таким способом, что объем 32 сканируется вдоль множества этих линий сканирования в каждом из срезов 48, 50 последовательно. При обработке приема на нескольких линиях, один пропускаемый пучок может облучать множество, например, четыре, линии приема сканирования, вдоль которых сигналы получаются параллельно. Если да, такие наборы линий приема затем электронно сканируются через объем 32 последовательно.
В текущем варианте применения, цель заключается в том, чтобы сегментировать совершенно идентичный объект, например, печень, по меньшей мере, из двух различных изображений. Сегментация содержит деформацию первоначальной модели, например, первоначальной модели, которая примерно представляет форму целевого объекта. В качестве примера, в случае если целевой объект представляет собой печень, первоначальная форма может представлять собой сферу или среднюю форму печени. Эта форма представлена посредством неявной функции, т.е. функции , заданной в целом пространстве, которая является положительной внутри формы и отрицательной снаружи. Форма в таком случае представляет собой набор нулевого уровня такой функции. Целая неявная функция деформируется посредством пространственного преобразования ψ. В частности, изменяется набор нулевого уровня, как и соответствующий объект. Это преобразование разлагается на два преобразования различных типов:


Оно по существу корректирует первоначальную позу модели.

Цель способа состоит в том, чтобы затем обнаруживать наилучший

В первой составляющей, также называемой верностью данных, H является функцией Хевисайда (H(x)=1, если x>0, и 0, если x<0), что означает то, что интеграл фактически находится только в деформированном объекте. является функцией на основе изображений, которая возвращает в каждой точке отрицательное (соответственно, положительное) значение, если воксел с большой вероятностью должен быть снаружи (соответственно, внутри) исследуемого объекта. Для неоднозначных областей задается равной нулю. Вторая составляющая представляет собой так называемую регуляризацию. Вторая составляющая является нормой между
В простом примере только двух изображений, и если эти два изображения уже идеально совмещены, то вышеописанное уравнение может легко быть расширено посредством добавления другой составляющей верности данных:

Тем не менее совмещаемое получение может осуществляться только в том случае, если оба US-изображения получаются одновременно или непосредственно друг за другом. Очень маловероятно, что US-изображения совмещены, если получаются впоследствии. Следовательно, это может учитываться при использовании другого преобразования. В общем, это преобразование может быть нестрогим и любого типа. Тем не менее, если исходить из допущения относительно поиска идентичного объекта, это преобразование (обозначенное


По существу, оно корректирует информацию изображений, исходящую из второй составляющей, посредством преобразования
Третья составляющая, которая является необязательной, сконструирована как ограничение на локальную деформацию. Она штрафует, если локальная деформация заставляет форму объекта слишком сильно отклоняться от первоначальной геометрической формы. Следовательно, поскольку выполняется поиск минимума, в случае если первая и вторая составляющая приводят к идентичным результатам, решение с преобразованием первоначальной геометрической формы в меньшей степени по сравнению с другими решениями должно считаться наилучшим. Параметр "λ" может задаваться с возможностью определять релевантность этого ограничения.
Оптимизация выполняется посредством градиентного спуска одновременно для

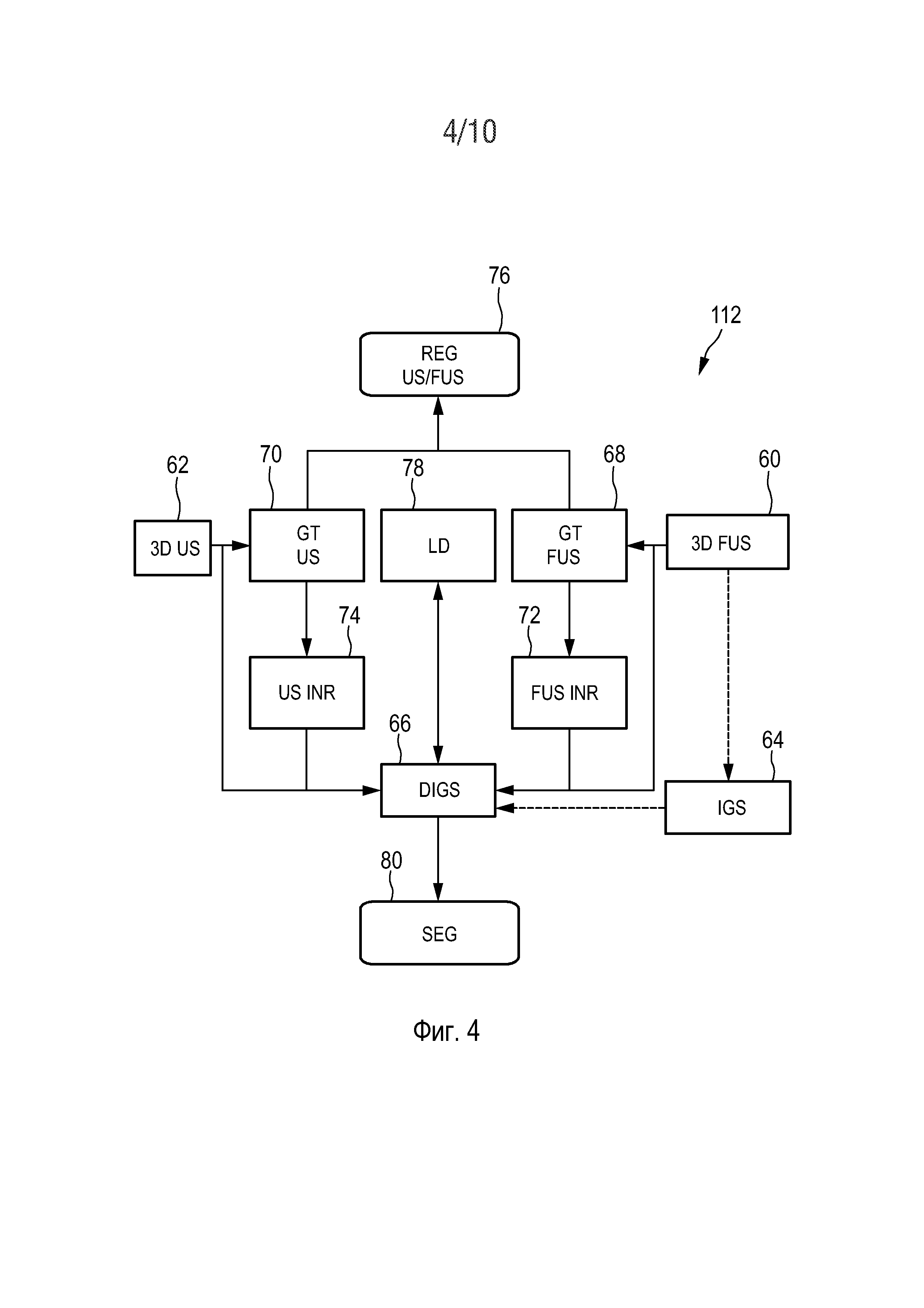
Фиг. 4 показывает вариант осуществления, в котором должна проводиться сегментация. В этом варианте осуществления, также совмещение данных трехмерных ультразвуковых изображений и дополнительных данных трехмерных ультразвуковых изображений.
Фактическая сегментация получается посредством деформации первоначальной геометрической формы с помощью двух преобразований, глобального, которое учитывает вращение, сдвиг и масштабирование, и локального, которое фактически модифицирует первоначальную геометрическую форму. Два преобразования обнаружены посредством минимизации конкурирующей энергии областей, так что деформированная форма совпадает с границей целевого объекта в данных изображений. В этом варианте осуществления, две составляющих на основе изображений используются в энергетической составляющей, так что учитывается множество US-изображений. В случае более двух ультразвуковых изображений могут добавляться дополнительные энергетические составляющие на основе изображений, по одной для каждого изображения. Поскольку два (или более) набора данных изображений необязательно совмещены, одна из двух составляющих на основе изображений должна корректироваться посредством преобразования. Если, например, печень должна быть сканирована, и пациент задерживает дыхание, можно предположить, что печень не деформирована во время получения нормальных данных ультразвуковых изображений и дополнительных данных ультразвуковых изображений, так что строгое преобразование может применяться только с перемещением в пространстве и вращением. Затем энергия относительно глобального преобразования, локального преобразования и строгого преобразования между US-изображениями может быть оптимизирована.
Сначала, сегментация может быть инициализирована посредством нахождения или задания первоначальной геометрической формы 64. Это также может проводиться вручную. Инициализация совмещения может проводиться посредством поиска первоначальной геометрической формы 64 также в нормальных данных трехмерных ультразвуковых изображений только посредством перемещения в пространстве и вращения первоначальной геометрической формы. Посредством этого, может предоставляться первоначальное геометрическое преобразование между нормальными данными трехмерных ультразвуковых изображений и дополнительными данными трехмерных ультразвуковых изображений. Это геометрическое преобразование может оцениваться посредством полного поиска (по сдвигам и вращениям) в нормальном трехмерном ультразвуковом изображении ранее оцененной первоначальной формы, например, эллипсоида, сферы или цилиндра. Дополнительно, инициализация может быть обнаружена через отслеживающее устройство, как подробнее пояснено ниже.
Затем после предоставления инициализаций для этапов 64 и 76 и предоставления данных 62 трехмерных ультразвуковых изображений и дополнительных данных 60 трехмерных ультразвуковых изображений, может осуществляться фактическая сегментация. Сегментация работает следующим образом.
Предварительно заданная первоначальная геометрическая форма теперь деформируется согласно вышеописанной структуре с тем, чтобы более точно сегментировать объект или печень. В конкретном варианте применения, составляющая на основе изображений может задаваться равной , где Δ-оператор обозначает оператор Лапласа. Математически, минимизация оператора Лапласа изображения внутри объекта означает то, что векторы нормали поверхности объекта должны совпадать с градиентом изображения; другими словами, способ сегментации должен искать края с переходом ярких в темные части (или с переходом темных в яркие части, в зависимости от знака умножения).
На фиг. 4, показаны глобальное преобразование данных 70 ультразвуковых изображений и глобальное преобразование дополнительных данных 68 ультразвуковых изображений, которые должны проводиться с преобразованием данные изображений всех изображений в одну систему координат. Нормальные данные трехмерных ультразвуковых изображений на этапе 74 и дополнительные данные ультразвуковых изображений преобразованы на этапе 72. Тем не менее, конечно, может иметь место то, что система координат либо данных трехмерных ультразвуковых изображений, либо дополнительных данных ультразвуковых изображений может использоваться в качестве системы координат, так что только одни из нормальных данных трехмерных ультразвуковых изображений и дополнительных данных трехмерных ультразвуковых изображений должны быть реально преобразованы. Дополнительно, все данные ультразвуковых изображений также могут быть преобразованы в систему координат, полученную через дополнительную модальность, например, магнитно-резонансную томографию и т.п. Одновременно, проводится локальная деформация 78, как пояснено выше. Это приводит к деформированной модели 66 первоначальной геометрической формы 64, как пояснено выше. Посредством применения этой деформированной модели первоначальной геометрической формы, объект может быть сегментирован из нормальных данных трехмерных ультразвуковых изображений и дополнительных данных трехмерных ультразвуковых изображений на этапе 80. В качестве побочного результата, поскольку нормальные данные трехмерных ультразвуковых изображений и дополнительные данные трехмерных ультразвуковых изображений должны быть глобально и локально деформированы в идентичной системе координат, преобразование, совмещающее нормальные данные трехмерных ультразвуковых изображений и данные трехмерных ультразвуковых изображений, обнаружено в качестве этапа 76.
С другой стороны, в качестве иллюстрации фиг. 5a показывает примерную функцию 84 в изображении 82.
На фиг. 5b, показано, что предоставляется первоначальная геометрическая форма 64, обнаруженная в процессе инициализации, поясненном выше из базовой геометрической формы 84. Выполняется поиск преобразования ψ, что приводит к деформированной модели 86, который сегментирует объект из нормальных данных трехмерных ультразвуковых изображений и дополнительных данных трехмерных ультразвуковых изображений.
На фиг. 5c, снова подробно показано то, как преобразование из первоначальной геометрической формы 64 в деформированную модель 86 разбивается между локальной деформацией 78 и глобальной деформацией 68, 70. Как пояснено выше, предоставляется функция 90 локального преобразования, которая локально деформирует первоначальную геометрическую форму в деформированную форму 92. Затем функция 88 глобального преобразования предоставляется для того, чтобы перемещать в пространстве, вращать и масштабировать деформированную форму 92.
Фиг. 6 показывает блок-схему последовательности операций способа, иллюстрирующую то, как процесс косегментации и совмещения, показанный на фиг. 4, встраивается в улучшенную инициализацию и калибровку согласно настоящему изобретению. Процесс, показанный на фиг. 4, также присутствует на фиг. 6 в качестве одного этапа, обозначенного с помощью ссылки с номером 112. Первоначальная геометрическая форма 64, которая в случае, если целевой объект 33 представляет собой печень, например, среднюю форму печени, вводится в процесс 112 косегментации и совмещения, а также в первое и дополнительные полученные ультразвуковые изображения 60, 62. Тем не менее для того чтобы инициализировать процесс косегментации и совмещения, проводится протокол получения. Во-первых, на этапе 102 получаются калибровочные данные, как подробнее поясняется ниже со ссылкой на фиг. 7. При этом ультразвуковой зонд перемещается в предварительно заданные местоположения на теле пациента в определенных положениях. Посредством этого, отслеживающее устройство 25, 27 инициализируется. Конечно, могут предоставляться другие способы инициализации, например, может быть достаточным просто получать одно среднелинейное поперечное получение, чтобы калибровать отслеживающее устройство. Дополнительно, протокол получения может использоваться, например, с направлением различных получений согласно известным точкам наблюдения на человеческом теле, например, срединной сагиттальной, срединной подмышечной корональной и т.д.
Затем калибровка проводится на этапе 104. Множество ультразвуковых изображений получается через зонд, который содержит отслеживающее устройство. По меньшей мере, два получения выполняются из двух различных точек наблюдения. Предпочтительно, получения выполняются на идентичных фазах дыхания. Для каждого получения изображений точки наблюдения записываются через отслеживающее устройство. Затем проводится первое приблизительное совмещение ультразвуковых изображений относительно общего эталона. Она учитывает первоначальную геометрическую форму, калибровку, указывающую краниокаудальную ось пациента или любой другой заданный вид в теле пациента, и изображения и соответствующих координатах точки наблюдения. Посредством этого, можно примерно совмещать все ультразвуковые виды в простой матрице сдвигового преобразования посредством использования данных отслеживающего устройства. Теперь, геометрическая форма объекта и приблизительная оценка для положения точки наблюдения может вводиться в процессе косегментации и совмещения, как пояснено выше. Поскольку приблизительное совмещение уже проведено, область поиска совмещения для оптимального решения может значительно уменьшаться, приводя к более быстрым и более точным результатам.
Процесс, как пояснено с помощью фиг. 4, затем выводит как точную форму сегментированного объекта 108, так и точную матрицу преобразования и совмещение, которое приводит к точным положениям точки наблюдения каждого ультразвукового изображения.
Фиг. 7 показывает схематичную иллюстрацию тела пациента 12. Приводится приблизительное краткое представление возможного процесса 30 калибровки. Краниокаудальная ось обозначена с помощью ссылки с номером 122. Передне-задняя ось обозначена с помощью ссылки с номером 124. Ось слева направо обозначена с помощью ссылки с номером 126. Во время калибровки 102, пользователь перемещает зонд в первое положение 128 и затем во второе положение 130 на грудине пациента. Получение изображений не должно выполняться во время этого, тем не менее проводится первая инициализация отслеживающего устройства, в частности, электромагнитного отслеживающего устройства 25, 27. Альтернативно, получение изображений может быть уже проведено, и изображения могут использоваться впоследствии. После этого получение изображений объекта 33 может осуществляться, как обычно, и объект сканирован через зонд 14 получения ультразвуковых изображений в нормальном положении 132 получения.
Ниже описывается вариант осуществления способа со ссылкой на фиг. 8, который показывает блок-схему последовательности операций способа 140. Способ поясняется в связи с фиг. 9a-9d, которые показывают изображения, полученные в ходе различных этапов способа.
Способ начинается на этапе 142. Затем на этапе 144 пациент может быть сканирован через другую модальность. В текущем примере, предполагается, что цель состоит в том, чтобы исследовать печень пациента. Следовательно, на этапе 144, печень пациента сканирована через компьютерно-томографическую систему. Печень сегментирована из CT-данных. Указывается форма сегментированной печени из CT-изображений, которая может формировать первоначальную геометрическую форму, которая используется позднее в процессе косегментации и совмещения ультразвуковых изображений. Тем не менее этап 144 является просто необязательным. Также может быть возможным выбирать базовую геометрическую форму, например, сферу или цилиндр, в качестве первоначальной геометрической формы.
Через некоторое время после CT-исследования, например, через одну или несколько недель, может иметь место то, что пациент исследуется через ультразвуковую систему формирования изображения, например, во время минимально инвазивного вмешательства. Используемая ультразвуковая система представляет собой ультразвуковую систему согласно настоящему раскрытию сущности и оснащена отслеживающим устройством, в частности, зонд получения ультразвуковых изображений оснащен электромагнитным отслеживающим устройством. Пациент находится в электромагнитном поле электромагнитного отслеживающего устройства.
Теперь, на этапе 146, проводится первая калибровка или инициализация электромагнитного отслеживающего устройства. В ходе нее, получение изображений не должно обязательно осуществляется. Как пояснено в связи с фиг. 7, выполняется касание двух заданных различных положений 128 и 130 с помощью зонда получения ультразвуковых изображений. Поскольку положения являются четко определенными, краниокаудальная ось пациента инициализируется в электромагнитном отслеживающем устройстве. Эта инициализация также предоставляется в процесс косегментации и совмещения.
Затем проводится процесс инициализации 148 для процесса косегментации и совмещения. При этом, на этапе 150, получается множество ультразвуковых изображений. Для каждого положения координаты точки наблюдения записываются через электромагнитное отслеживающее устройство. Пациент может дышать свободно, но получения предпочтительно выполняются на идентичных фазах дыхания. Например, два ультразвуковых получения могут выполняться из двух различных точек наблюдения, как проиллюстрировано на фиг. 9a. Здесь показаны первое ультразвуковое получение 160 и второе ультразвуковое получение 162. Также показан индикатор 164 вида по причинам ориентации.
Затем на этапе 152 процесс косегментации и совмещения запускается, как пояснено подробно со ссылкой на фиг. 4. В этом процессе, форма печени, полученная через CT-сканирование, может учитываться в качестве первоначальной геометрической формы 64 посредством процесса. Дополнительно, положения 128 и 130 предоставляются в качестве индикатора краниокаудальной оси пациента и всех полученных ультразвуковых изображений, и вводятся их соответствующие координаты точек наблюдения, записываемые через электромагнитное отслеживающее устройство. Вывод процесса предоставляет точное позиционирование для электромагнитного отслеживающего устройства, т.е. зонда получения ультразвуковых изображений и его электромагнитного модуля отслеживания, для каждой точки наблюдения, дополнительно, следовательно, каждого положения зонда относительно общего эталона, например, CT-сканирование и, в завершение, точную сегментацию печени во всех ультразвуковых получениях.
Вывод алгоритма затем может использоваться для того, чтобы отображать точно совмещенные изображения с сегментированным объектом, например, печенью. Дополнительно, поскольку точное положение зонда известен, вывод алгоритма также может использоваться для того, чтобы точно калибровать электромагнитное отслеживающее устройство относительно общего эталона.
Фиг. 9b показывает оцененные положения зонда на основе ввода электромагнитного отслеживающего устройства в процесс косегментации и совмещения. Индикаторы 164 вида иллюстрируют точку наблюдения зонда 14 получения ультразвуковых изображений относительно сегментированной печени, полученной через CT-сканирование. Как проиллюстрировано на фиг. 9c, изображение, полученное через ультразвуковое получение, затем может совмещаться в CT-представлении и отображаться, соответственно, как показано на фиг. 9c. Фиг. 9c показывает совмещенные ультразвуковые изображения 170, 172, совмещенные в CT-сканировании.
Фиг. 9d показывает затем дополнительный вариант того, как использовать вывод процесса косегментации и совмещения. Изображение 174 показывает ультразвуковое обследование, в котором ярко выделяется сегментированная печень. Изображение 176 показывает CT-сканирование также с ярко выделенной сегментированной печенью. Патологическое изменение в печени, которое может быть искомым, указывается через стрелку 178 и может быть локализовано в ультразвуковом обследовании.
Дополнительный пример использования может заключаться в том, что проводится ультразвуковое обследование или минимально инвазивное вмешательство. Для каждого нового ультразвукового получения уже сегментированная форма печени может накладываться на ультразвуковое изображение. Дополнительно, в частности, поскольку электромагнитное отслеживающее устройство теперь надлежащим образом откалибровано и инициализировано, данные, доставляемые и записанные посредством электромагнитного отслеживающего устройства, могут использоваться для того, чтобы очень точно отображать ресурс совмещенных ультразвуковых изображений, а также в ходе использования. Дополнительно, всегда можно предоставлять соответствующее CT-представление параллельно.
Во время вмешательства, в случае если визуальные рассогласования между CT и ультразвуковыми видами либо между различными ультразвуковыми видами должны возникать, например, вследствие ухода в электромагнитном отслеживающем устройстве, процесс косегментации и совмещения может запускаться в качестве "детализации" калибровки и совмещения. С другой стороны, множество ультразвуковых изображений получается из различных точек наблюдения. Процесс косегментации и совмещения может запускаться снова с использованием этих новых захваченных данных изображений. Тем не менее, поскольку в системе возникает только уход параметров, система может считаться уже инициализированной. Следовательно, не возникает необходимости в потоке обработки перед калибровкой, как пояснено на этапе 146 и с помощью фиг. 7.
Конкретный вариант изобретения описан в области техники калибровки и детализации по запросу электромагнитного модуля отслеживания во время минимально инвазивного вмешательства. Следовательно, система ультразвукового изображения, оснащенная следящим датчиком, например, модулем отслеживания электромагнитного отслеживающего устройства, извлекает выгоду из этого изобретения. Для конкретного варианта, описанного выше, форма печени в CT является точной. Тем не менее изобретение также направлено на косегментацию и совмещение целевого объекта, для которого предоставлена только приблизительная оценка формы объекта, например, средней формы. Таким образом, изобретение находит применение также только для ультразвуковых систем, которые оснащены отслеживающим устройством, и для которых CT-сканирование недоступно. Для этой заявки, изобретение затем может служить для того, чтобы сегментировать объект в нескольких ультразвуковых видах. Дополнительно, косегментация и совмещение может проводиться и поддерживаться посредством MR-данных и с множеством ультразвуковых видов. Следовательно, многомодальные рабочие станции также могут извлекать выгоды из этого изобретения.
Хотя изобретение подробно проиллюстрировано и описано на чертежах и в вышеприведенном описании, такое иллюстрирование и описание должны считаться иллюстративными или примерными, а не ограничивающими; изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации в раскрытых вариантах осуществления могут пониматься и выполняться специалистами в данной области техники при применении на практике заявленного изобретения, из изучения чертежей, раскрытия сущности и прилагаемой формулы изобретения.
В формуле изобретения, слово "содержащий" не исключает другие элементы или этапы, и неопределенный артикль "a" или "an" не исключает множество. Один элемент или другой модуль может выполнять функции нескольких элементов, изложенных в формуле изобретения. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, что комбинация этих мер не может быть использована с выгодой.
Компьютерная программа может сохраняться/распространяться на подходящем носителе, таком как оптический носитель хранения данных или полупроводниковый носитель, поставляемом вместе или в качестве части других аппаратных средств, но также может распространяться в других формах, к примеру, через Интернет либо другие системы проводной или беспроводной связи.
Все ссылки с номерами в формуле изобретения не должны рассматриваться как ограничивающие объем.
Реферат
Группа изобретений относится к медицинской технике, а именно к средстам формирования ультразвуковых трехмерных изображений. Ультразвуковая система формирования изображения для обследования объекта в объеме содержит зонд получения ультразвуковых изображений, содержащий отслеживающее устройство положения зонда и предоставления положения точки наблюдения трехмерных ультразвуковых изображений, и процессор изображений, сконфигурированный для приема множества трехмерных ультразвуковых изображений и их соответствующих положений точки обзора и проведения сегментации объекта одновременно из множества трехмерных ультразвуковых изображений. Способ предоставления ультразвукового изображения осуществляется посредством системы, содержащей также машиночитаемый носитель, хранящий компьютерную программу выполнения этапов способа предоставления ультразвукового изображения объекта в объеме. Использование изобретений позволяет расширить арсенал средств для автоматизированной сегментации и регистрации трехмерных ультразвуковых изображений объектов. 3 н. и 12 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Система, устройство, способ, машиночитаемый носитель и применение для визуализации ткани in vivo в анатомической структуре
Комментарии