Многоосевой управляемый манипулятор и использующий его рентгеновский аппарат - RU2108905C1
Код документа: RU2108905C1
Описание
Изобретение касается многоосевого управляемого манипулятора, в основном содержащего взаимосвязанные опорные рычаги, которые приводятся в движение посредством управляемых элементов перемещения таким образом, что свободный конец манипулятора может перемещаться и занимать различные положения в пространстве, а также содержащий средства управления для выдачи команд исполнительным механизмам, причем средства управления включают миниатюрную модель манипулятора, выполненную в строгом масштабе, которая приводится в движение вручную и которая оснащена рядом датчиков положения, способных выдавать сигналы управления для приведения в действие исполнительных механизмов таким образом, что манипулятор и миниатюрная модель всегда занимают идентичные положения.
Многоосевые управляемые манипуляторы хорошо известны и обычно описываются как роботы в промышленном применении. Свободный конец робота, который может быть оснащен, например, распрыскивающей головкой или сварочной головкой, перемещается вдоль более или менее сложной траектории, по которой заранее намеченные операции выполняются в определенных положениях или одновременно с прохождением по такой траектории. Траектория прохождения и выполняемые операции фиксируются в программе, которую средства управления читают и преобразуют в сигналы управления для приведения в действие исполнительных механизмов. Разработка такой программы представляет из себя обычно сложную работу, поглощающую много времени, и поэтому она предпринимается только в случае повторяющихся узоров перемещения, как это бывает при обработке товаров массового производства.
Работа по программированию может быть облегчена при помощи так называемого самопрограммирования, когда свободный конец робота или манипулятора перемещается вручную вдоль желательной трассы движения, а траектория этого перемещения одновременно записывается в программу, и эта программа после этого может быть введена в средства управления для приведения в действие исполнительных механизмов.
Многоосевой управляемый манипулятор описанного выше типа для перемещения по неповторяющимся траекториям известен из патента США-A-3637092. Эта известная система управления обычно описывается как система хозяина и раба, в которой раб - манипулятор - точно повторяет движения хозяина - миниатюрной модели манипулятора - с небольшим опозданием или без него.
Оператор такой системы в этом случае должен постоянно внимательно следить за концом манипулятора, чтобы избежать его столкновения с объектом, подлежащим обработке, как например с грузом, который надо захватить и потом поднять.
В случае использования манипулятора в виде рентгеновского аппарата, свободный конец которого оснащен C-образным опорным рычагом, несущим на одном конце рентгеновский источник, а на другом - датчик изображения, проблема заключается в том, что, хотя, как кажется, рентгеновский аппарат может быть размещен примерно в желательном положении относительно пациента, подлежащего осмотру при его помощи, правильное, точное относительное положение рентгеновского аппарата и пациента должно определяться при помощи изображения, которое посылается датчиком изображения на экран, установленный перед оператором, в этом случае - радиологом. Изображение на экране не дает никакой информации о точном относительном расстоянии между рентгеновским источником и обследуемым пациентом, так что есть определенный риск, что, когда рентгеновский источник перемещается "наощупь", а все внимание оператора обращено на экран, может случиться "столкновение" между рентгеновским источником и пациентом с возможностью серьезного ранения пациента.
Техническая задача изобретения состоит в том, чтобы обеспечить систему управления манипулятором вышеописанного типа, которая позволяет быстрое желательное перемещение его свободного конца по непрерывной траектории, при котором столкновения между манипулятором и обследуемым объектом исключаются с абсолютной определенностью.
Поставленная задача, согласно изобретению решается благодаря тому, что средства управления также содержат миниатюрную модель "объекта, подлежащего обследованию или обработке при помощи манипулятора, причем масштаб миниатюрной модели обрабатываемого объекта больше, чем масштаб миниатюрной модели манипулятора для того, чтобы создать зону безопасности, исключающую столкновение, в непосредственном окружении обрабатываемого объекта.
Путем приведения в движение миниатюрной модели манипулятора вручную относительно объекта, также выполненного в принципе, том же масштабе, в то время как движения - обычно имеющие угловой характер - частей масштабной модели передаются в соотношении 1:1 к исполнительным механизмам манипулятора посредством управляющих сигналов, издаваемых датчиками позиции, свободный конец манипулятора может быть перемещен в правильное положение по отношению к обследуемому объекту, и оператору не потребуется разделять свое внимание между экраном с одной стороны и действительными перемещениями свободного конца манипулятора - с другой. Перемещения манипулятора могут контролироваться одновременно более, чем по двум осям.
Благодаря тому что миниатюрная модель объекта выполнена в большем масштабе, чем миниатюрная модель манипулятора, столкновение между манипулятором, несущим рентгеновскую систему, и обследуемым при ее помощи пациентом исключено с абсолютной определенностью.
Если, например, масштаб миниатюрной модели манипулятора 1:10, а масштаб миниатюрной модели обследуемого объекта - 1:9, оператор может перемещать свободный конец масштабной модели манипулятора над поверхностью миниатюрной модели объекта, и при этом манипулятор продолжает оставаться на расстоянии от обследуемого объекта. С зоной безопасности, созданной таким образом, оператор, в этом случае радиолог, может перемещать миниатюрную модель манипулятора "наощупь" и обратить все свое внимание на рентгеновское изображение, показываемое на экране, части тела обследуемого пациента.
Согласно альтернативному использованию изобретения эта задача может быть также достигнута благодаря тому, что средства управления также содержат миниатюрную модель обследуемого объекта манипулятором, причем масштаб миниатюрной модели манипулятора локально больше, чем масштаб миниатюрной модели объекта за счет локального приложения материального слоя для образования зоны безопасности.
Это может быть достигнуто, например, путем наложения слоя материала определенной толщины к части миниатюрной модели манипулятора, соответствующей рентгеновскому источнику. Зона безопасности, создаваемая таким образом, имеет преимущество в том, что различные объекты, незначительно различающиеся по размерам, могут обследоваться с использованием одной и той же миниатюрной модели объекта.
Может потребоваться, чтобы манипулятор был приведен в контакт в различных точках обследуемого или обрабатываемого объекта. Поэтому в этих точках должны быть "дыры" в зоне безопасности. Такая "дыра" предпочтительно образуется путем изготовления миниатюрной модели объекта локально в масштабе, отличающемся от масштаба остальной части модели, например, придавая этим частям такой же или же меньший масштаб, чем у миниатюрной модели манипулятора.
В случае, когда миниатюрная модель объекта выполнена в масштабе 1:9, а миниатюрная модель манипулятора - в масштабе 1:10, миниатюрная модель объекта также выполнена в некоторых местах в масштабе 1:10, что дает возможность установления контакта между манипулятором и объектом только в этих точках.
Может оказаться желательным, чтобы объект обследовался или обрабатывался на столе, подвижном вертикально, наклонно и горизонтально.
Это бывает, например, в случае рентгеновского обследования пациента. В этом случае миниатюрная модель объекта должна быть расположена на миниатюрной модели поддерживающего стола, которая подвижна таким же образом как и подлинный поддерживающий стол, и которая связана с ним таким образом, что миниатюрная модель и поддерживающий стол всегда занимают идентичные позиции.
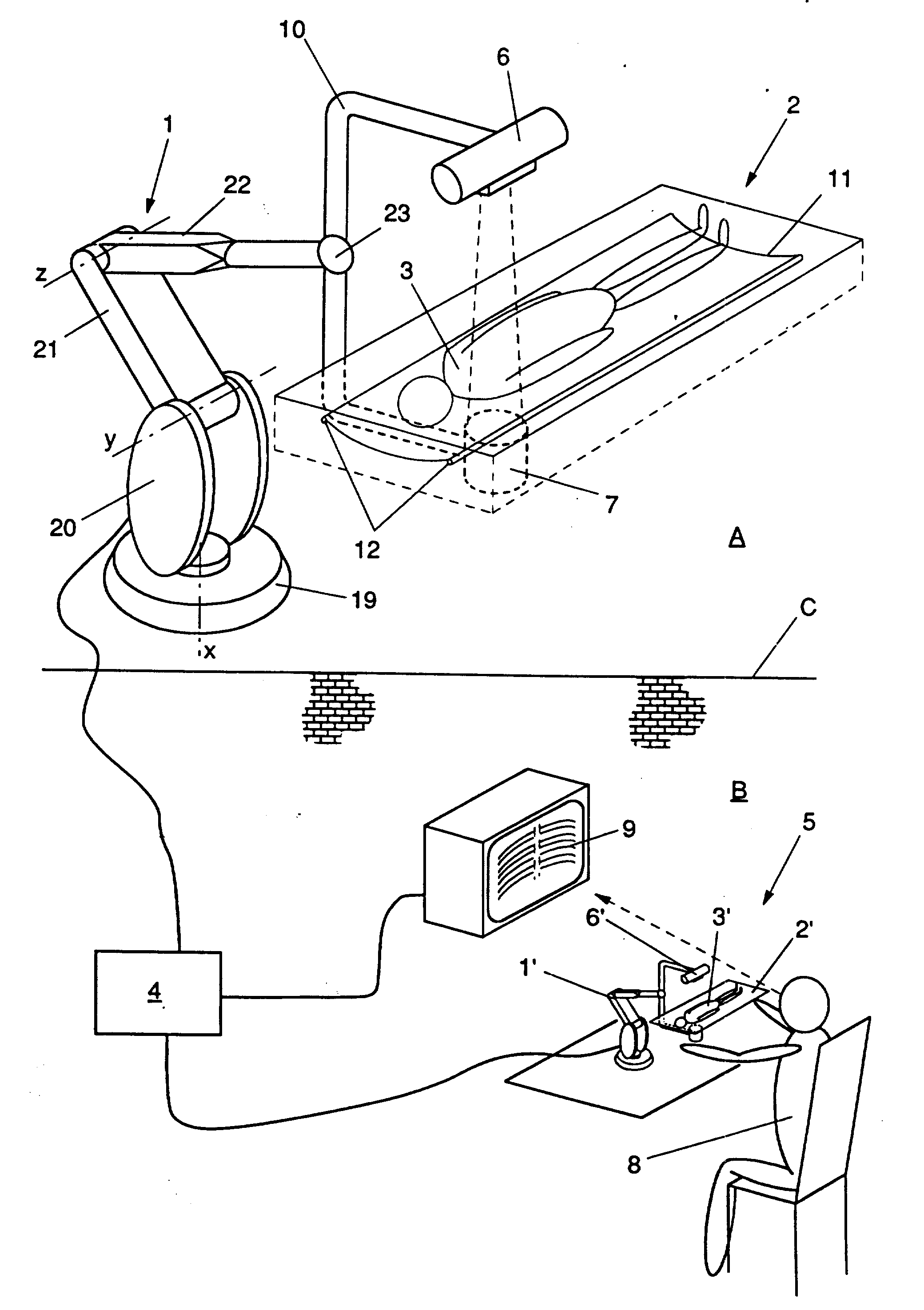
На чертеже схематически показан манипулятор, несущий рентгеновскую систему, расположенную в удобном для этого месте, в то время как средства управления им находятся в экранизированном помещении.
В помещении A, удобном для рентгеновского обследования, находится манипулятор 1 с рентгеновской системой и поддерживающий стол 2 для пациента 3. Манипулятор 1 содержит основание 19, опирающуюся на него стойку 20, способную вращаться по отношению к основанию 19 вокруг вертикальной оси X благодаря соответствующему исполнительному механизму.
Нижний рычаг 21 шарнирно связан со стойкой 20 и может поворачиваться благодаря соответствующему исполнительному механизму вокруг горизонтальной оси Y, в то время как верхний рычаг 22 шарнирно связан с нижним рычагом 21 и может вращаться под действием соответствующего исполнительного механизма вокруг горизонтальной оси. Свободный конец 23 верхнего рычага 22 поэтому может пространственно перемещаться благодаря вращению стойки 20 и угловым перемещением нижнего рычага 21 по отношению к стойке 20 и верхнего рычага 22 по отношению к нижнему рычагу 21.
К свободному концу 23 верхнего рычага 22 прикреплена C-образная скоба, к одному концу которой присоединен источник рентгеновского излучения 6, в то время как другой конец скобы 10 несет датчик 7 рентгеновского изображения, расположенный на пути радиационного луча рентгеновского источника 6. Скоба 10 подвешена к концу 23, который можно назвать цапфой, таким образом, что скоба 10 может вращаться вокруг трех осей под прямыми углами между ними.
Поддерживающий стол 2 для пациента 3 может быть изготовлен таким образом, чтобы быть регулируемым по высоте и перемещаемым в горизонтальном направлении, в то же время стол 2 может выполнять наклоны вокруг оси, параллельной его короткой стороне. Поверхность расположения пациента 3 на столе 2 образована простыней 11 с открытыми концами, которая закручена вокруг двух стержней 12, расположенных в продольном направлении стола 2. По крайней мере один из этих стержней 12 может смещаться в периферийном направлении, чтобы позволить пациенту 3 занять наклонное положение на слегка прогибающейся простыни 11, что необходимо или желательно для получения более четкой рентгенограммы некоторых частей тела, как, например, для получения хорошего распределения контрастной жидкости в некоторых органах пациента.
Средства управления манипулятором 1 и поддерживающий стол 2 с пациентом 3, лежащим на нем, расположены в помещении B, защищенном экраном от помещения стенкой A стенкой C. Средства управления содержат оперативные средства 5, которые включают миниатюрную модель 1' выполненную в основном в масштабном соотношении к манипулятору 1, и миниатюрную модель 3' пациента 3, причем миниатюрная модель 3' расположена на миниатюрной модели 2' поддерживающего стола 2.
В отличие от миниатюрной модели 1' манипулятора 1 и миниатюрной модели 2' поддерживающего стола 2 миниатюрная модель 3' объекта 3 (пациента, подлежащего обследованию) не обязательно должна быть точной, выдержанной в масштабе копией. Это было бы чрезвычайно трудно выполнить во время обследования пациента.
Миниатюрная модель 3' пациента 3 может иметь форму, скажем, русской матрешки или цилиндра, которые при увеличении на коэффициент масштабного отношения в положении на поддерживающем столе 2 создают пространство, в котором пациент 3 может быть безопасно размещен, не подвергаясь опасности столкновения с частями 6, 7, 10 манипулятора 1. Для простоты изложения этот блок, цилиндр или кукла будут ниже именоваться как миниатюрные модели 3ЮЯ пациента 3. Очень важно, чтобы эта масштабная модель 3' была закреплена на миниатюрной модели 2' поддерживающего стола 2 удобным образом, чтобы избежать скольжения модели 3'.
Миниатюрная модель Г манипулятора снабжена рядом датчиков позиции, которые передают относительные положения компонентных частей манипулятора 1 и могут выдавать соответствующие сигналы управления в контрольный узел 4, связанный с манипулятором 1. На основании этих сигналов управления компонентные части манипулятора 1 перемещаются и занимают такие же позиции, как и миниатюрная модель 1' манипулятора 1.
Экран 9, демонстрирующий рентгеновское изображение, поставляемое датчиком изображения 7, также связан с контрольным узлом 4.
Масштабное отношение миниатюрной модели 3' пациента 3 отличается от масштабного отношения миниатюрной модели 1' манипулятора 1. Если для последней выбрано, например, отношение 1:10, масштабное отношение для миниатюрной модели 3' пациента 3 будет, например, 1:9. Когда элемент 6' миниатюрной модели 1', соответствующий рентгеновскому источнику 6 манипулятора 1, вступает в контакт, например, с грудью миниатюрной модели 3' пациента 3, настоящий рентгеновский источник 6 будет оставаться на расстоянии от груди пациента 3.
Это различие в масштабных отношениях означает, что вокруг пациента 3 создается зона безопасности и, например, рентгеновский источник 6 манипулятора не может вступить в эту зону. Такую же зону безопасности можно получить, если использовать одинаковое масштабное соотношение как для миниатюрной модели 3' пациента 3, так и для миниатюрной модели 1' манипулятора, но при этом приложить материальный слой определенной толщины, например, к рентгеновскому источнику 6' миниатюрной модели 1' манипулятора 1.
Если этот материальный слой находится, скажем, на груди миниатюрной модели 3' пациента 3, рентгеновский источник 6 манипулятора 1 будет все еще расположен на расстоянии от груди пациента 3, и это расстояние определяется толщиной слоя, приложенного к рентгеновскому источнику 6' миниатюрной модели 1'. Такая же зона безопасности может быть создана, если окружить миниатюрную модель 1' манипулятора 1 стенками помещения A, выполненными в масштабе, и также покрыть эти стенки слоем материала, так что в случае столкновения частей миниатюрной модели 1' со стенками, выполненными в масштабе, подлинный манипулятор 1 будет еще находиться на некотором расстоянии от настоящих стенок пространства A.
Рентгеноскопия осуществляется при помощи
вышеописанного устройства следующим образом:
Пациент 3 укладывается на поддерживающий
стол 2. Радиолог 8 устанавливает миниатюрную модель 1' манипулятора 1 вручную примерно в правильное
положение относительно миниатюрной модели 3' пациента 3. Далее осуществляется тонкая регулировка, в
ходе которой радиолог 8 смотрит на экран 9 и перемещает миниатюрную модель 1' "наощупь" таким
образом, чтобы получить оптимальное рентгеновское изображение.
После этого миниатюрная модель 3' пациента 3 может быть наклонена путем приведения в действие приводного стержня 12' простыни 11' миниатюрной модели 2' для продолжения рентгеноскопии, причем угловое перемещение стержня 12' связано с угловым перемещением вращающегося стержня 12 таким образом, что пациент 3 и миниатюрная модель 3' наклоняются в одинаковое положение.
Если поддерживающий стол 2 оснащен другими возможностями перемещения, как, например, перемещение в продольном направлении, вертикальная регулировка и возможности поворота вокруг короткой стороны поддерживающего стола, миниатюрная модель 2' также должна располагать такими возможностями перемещения, и движения миниатюрной модели 2' связаны таким же образом с перемещением элементов поддерживающего стола 2, как и в случае связи между миниатюрной моделью 1' и манипулятором 1.
В случае использования опоры объекта 2 она также оснащена исполнительными механизмами и позиционными датчиками для регулировки и определения положения опоры объекта 2, в то же время миниатюрная модель 2' опоры объекта 2 оснащена позиционными датчиками, которые связаны только с соответствующими позиционными датчиками опоры объекта 2 посредством сравнивающего устройства, которое при наличии сигнала разности между позиционными сигналами, поступившими от двух позиционных датчиков, выдает сигнал управления исполнительному механизму, который относится только к определенному позиционному датчику опоры объекта 2, и этот исполнительный механизм может контролироваться, чтобы свести сигнал разницы к нулю.
Когда манипулятор 1 или опора объекта 2 совершают движения, которые не санкционированы средствами управления 4, 5, например, в результате ошибки, в действие вступает механизм безопасности и, например, отключает энергоснабжение и закрепляет манипулятор 1 и опору объекта в последнем положении путем торможения.
Совершенно очевидно, что изобретение не ограничивается примером описанной реализации и многие модификации возможны в пределах объема изобретения.
Реферат
Изобретения могут быть использованы в различных областях при обработке объектов с помощью управляемых манипуляторов, в частности в медицине при рентгеновском обследовании пациента. Многоосевой управляемый манипулятор содержит взаимосвязанные опорные рычаги, которые приводятся в движение исполнительными механизмами. В результате выходной конец рычажной системы перемещается в пространстве относительно трех взаимно перпендикулярных осей. Система управления исполнительными механизмами включает миниатюрную модель манипулятора с позиционными датчиками и миниатюрную модель обрабатываемого объекта. Масштабное отношение модели объекта и самого объекта больше масштабного отношения модели манипулятора и манипулятора. В другом варианте манипулятора масштабное отношение модели манипулятора и манипулятора превышает масштабное отношение модели объекта и объекта. Система управления многоосевым манипулятором рентгеновского аппарата включает миниатюрные модели манипулятора и опоры объекта, положение которых идентично положению самих манипулятора и опоры. 3 с. и 8 з.п.ф-лы, 1 ил.
Комментарии