Узел ручного перемещения с поддержкой от двигательного привода, рентгеновская система, содержащая такой узел, способ и применение - RU2573047C2
Код документа: RU2573047C2
Чертежи







Описание
Область техники, к которой относится изобретение
Настоящее изобретение, в целом, относится к технологии генерации рентгеновского излучения. Более конкретно, настоящее изобретение относится к рентгеновским системам, мобильным рентгеновским системам, системам с C-образным кронштейном для получения рентгеновского изображения объекта. В частности, оно относится к перемещению и позиционированию рентгеновской системы относительно объекта, подлежащего исследованию.
Уровень техники изобретения
Рентгеновские системы хорошо известны в технике для диагностических и терапевтических целей, в том числе для получения рентгеновского изображения объекта, подлежащего исследованию, например интересующей области живого организма.
Рентгеновские системы для получения рентгеновских изображений, как правило, содержат устройство генерации рентгеновского излучения, например рентгеновскую трубку и рентгеновский детектор, установленные и функционально соединенные для получения рентгеновских изображений объекта, подлежащего исследованию. Устройство генерации рентгеновского излучения и рентгеновский детектор устанавливаются на противоположных сторонах объекта, обращенными друг к другу. Рентгеновское излучение, выходящее из устройства генерации рентгеновского излучения, испускается в направлении рентгеновского детектора, проникая, таким образом, через объект, подлежащий исследованию, и, следовательно, создает рентгеновское изображение объекта внутри рентгеновского детектора.
Как устройство генерации рентгеновского излучения, так и рентгеновский детектор обычно являются твердыми массивными элементами, обладающими существенным весом. Таким образом, для перемещения устройства генерации рентгеновского излучения и/или рентгеновского детектора вокруг объекта, подлежащего исследованию, например для получения рентгеновских изображений в различной ориентации, к устройству генерации рентгеновского излучения и/или рентгеновскому детектору должна быть приложена сила, которая обычно не может считаться пренебрежимо малой.
Сущность изобретения
Таким образом, может иметься потребность в выполняемом с поддержкой, но управляемом перемещении отдельных элементов или устройств рентгеновской системы со сниженными требованиями к силе и с повышенной точностью позиционирования.
Ниже предлагается узел перемещения с поддержкой от двигательного привода, а также применение узла перемещения с поддержкой от двигательного привода, в соответствии с независимыми пунктами формулы изобретения.
В соответствии с примером варианта осуществления настоящего изобретения, обеспечивается узел перемещения с поддержкой от двигательного привода, содержащий первый конструктивный элемент, второй конструктивный элемент и двигательное устройство, содержащее двигательный элемент. Первый конструктивный элемент и второй конструктивный элемент могут перемещаться относительно друг друга с помощью двигательного устройства, установленного на первом конструктивном элементе. Второй конструктивный элемент выполнен с возможностью приема ручной индикации о желаемом перемещении второго конструктивного элемента относительно первого конструктивного элемента. Двигательное устройство выполнено с возможностью поддержки перемещения второго конструктивного элемента относительно первого конструктивного элемента в соответствии с ручной индикацией. Двигательный элемент выполнен с возможностью обнаружения ручной индикации.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, обеспечивается рентгеновская система, содержащая устройство генерации рентгеновского излучения, рентгеновский детектор и узел перемещения с поддержкой от двигательного привода. Устройство генерации рентгеновского излучения и рентгеновский детектор функционально соединены и установлены для получения рентгеновских изображений объекта, подлежащего исследованию, с помощью узла перемещения с поддержкой от двигательного привода, выполненного с возможностью перемещения устройства генерации рентгеновского излучения и/или рентгеновского детектора вокруг объекта.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, обеспечивается способ перемещения с поддержкой от двигательного привода, причем упомянутый способ содержит этапы, на которых в двигательном элементе обнаруживают ручную индикацию желаемого перемещения второго конструктивного элемента относительно первого конструктивного элемента и поддерживают желаемое перемещение.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, узел перемещения с поддержкой от двигательного привода используется в рентгеновской системе, мобильной рентгеновской системе, системе с C-образным кронштейном и/или системе поддержки пациента.
Настоящее изобретение может рассматриваться как улучшение характеристик управления и добавление расширенных функциональных возможностей для ручного перемещения первого конструктивного элемента относительно второго конструктивного элемента.
Например, в межоперационном сценарии используется система получения рентгеновского изображения, такая как, например, система с C-образным кронштейном. От оператора, например техника-рентгенолога, требуется получить соответствующие изображения, например для хирурга, перед, во время и после операции. Так как система с C-образным кронштейном получает только двумерные изображения в определенной плоскости интересующей области объекта, может оказаться необходимым перемещать C-образный кронштейн, по меньшей мере, его C-образно изогнутый элемент или повторно выравнивать C-образный кронштейн для получения рентгеновского изображения в другой плоскости представления.
Кроме того, пространственные требования или пространственные ограничения во время операции могут потребовать расположить систему с C-образным кронштейном вдали от операционного стола, когда не требуется получать изображение, и впоследствии переместить систему с C-образным кронштейном в область операции и из нее, когда должно быть получено изображение.
Так как C-образный кронштейн обычно обладает существенным весом, перемещение устройства генерации рентгеновского излучения и/или рентгеновского детектора может быть утомительной нагрузкой.
Дополнительно, при перемещении C-образного кронштейна может потребоваться повторно выровнять рентгеновский детектор и устройство генерации рентгеновского излучения в определенном положении, используемом для предварительного получения изображения, в частности, чтобы получить совпадающие последовательные рентгеновские изображения, например, после определенной части операции.
Таким образом, ручное перемещение с поддержкой от двигательного привода отдельных элементов рентгеновской системы или рентгеновской системы, в целом, может быть полезным.
В частности, улучшение характеристик может произойти за счет моторизированных систем во время ручного перемещения механически сбалансированной системы. Оператор может инициировать желаемое перемещение, например вращение устройства генерации рентгеновского излучения и/или рентгеновского детектора вокруг оси. Это инициированное перемещение или индикация перемещения могут быть определены, и должным образом установленный двигатель может приложить дополнительную силу или добавочную силу, чтобы уменьшить ощущение трения и массы элементов, которые должны передвигаться, помогая, таким образом, осуществляемому в это время вручную перемещению, вызванному оператором/индикацией перемещения. В частности, для обеспечения индикации перемещения может использоваться элемент ручного управления, например рукоятка, которая может не содержать датчики, переключатели и т.п. Однако специализированный элемент ручного управления может не требоваться вообще, но может быть предпочтительным. Соответствующий элемент ручного управления может, в частности, обеспечивать прием ввода ручного управления и может быть пригоден для приема адекватного ввода для всех осуществимых перемещений или направлений перемещений.
Дополнительные функции могут быть программируемыми остановками при направлении в предпочтительные или заданные положения, которые могут храниться в прикладных программах управления, или могут обеспечиваться программы, например, для перемещения рентгеновской системы в определенное и/или ранее использовавшееся положение для получения изображений. Кроме того, могут быть осуществлены индивидуальные профили пользователя с различными индивидуальными уровнями поддержки от двигателя.
Может использоваться характеристика непосредственного привода по технологии двигателей с непосредственной передачей вращения, например, привода, не требующего отдельной коробки передач, уменьшая, таким образом, количество компонент привода передачи.
Принцип непосредственного привода может позволить осуществлять различные режимы работы, например режим привода, режим муфты и режим прерывания.
Режим привода может позволить использование ручного перемещения с поддержкой от двигательного привода, как описывалось ранее.
Прерывая подачу электропитания для двигательного элемента, можно получить, по существу, двигательный элемент, работающий на холостом ходе, что может рассматриваться, по существу, как движение на холостом ходе, не требующее дополнительного приложения сил сверх сил для ручного перемещения конструктивного элемента без поддержки. Соответствующая операция может упоминаться как режим муфты.
В режиме прерывания устройство генерации рентгеновского излучения и/или рентгеновский детектор могут остановиться в заданном положении и могут даже удерживаться в упомянутом положении противодействием двигателя, возможно, силами, непреднамеренно приложенными, например, к C-образному кронштейну или, по меньшей мере, к С-образно изогнутому элементу.
Соответствующий двигательный элемент может быть элементом щеточного или бесщеточного двигателя. Бесщеточный двигатель может обеспечивать хорошие характеристики управления при высоких вращающих моментах и низких скоростях, в том числе при нулевой скорости. Следовательно, могут использоваться цепи привода с низким передаточным числом или цепи непосредственного привода, приводя, таким образом, в результате к очень эффективной передаче.
Дополнительным преимуществом, по существу, непосредственного привода может быть то, что ток двигательного элемента может быть хорошим критерием или индикацией соответствующего вращающего момента при определенной нагрузке. Элемент управления перемещением может быть установлен в режим вращающего момента или тока, в котором вращающий момент, приложенный к двигателю, определяется результирующим током двигателя, являющимся основой для функциональной возможности оказания поддержки посредством двигателя. Другими словами, двигатель может определять, что оператор намеревается делать/какое движение оператор желает произвести и, следовательно, элемент управления перемещением может реагировать на обратную связь по положению и может подавать от двигательного элемента часть силы, которая требуется для желаемого перемещения рентгеновской системы. Дополнительные функции, подобные стопорению, предпочтительному позиционированию и отключению, могут достигаться посредством, по существу, мгновенного переключения, например "переключением на лету", из режима вращающего момента в режим скорости или позиционирования, в котором определяется абсолютное положение первого конструктивного элемента и второго конструктивного элемента, возможно содержащих устройство генерации рентгеновского излучения и/или рентгеновский детектор. Положение может также содержать относительное положение первого конструктивного элемента и второго конструктивного элемента относительно друг друга.
Дополнительной проблемой функциональных возможностей при поддержке от двигательного привода может быть аспект безопасности. В известных системах часть, приводимая в движение двигателем, расположенная вокруг пациента, может управляться кнопкой, находящейся под контролем средства безопасности, то есть когда кнопка отпускается, перемещение останавливается фактически немедленно. Так как признаком настоящего изобретения может считаться исключение специализированного пускового элемента, например переключателя или кнопки для управления и инициирования перемещения, осуществляемого двигателем, вероятно, придется осуществить дополнительные меры безопасности. Критерий безопасности может, например, ограничивать вращающий момент и скорость движения при перемещении с поддержкой от двигателя, до уровня, который требует, по существу, постоянной силы или индикации оператора. В случае, когда эта постоянная сила или индикация больше не присутствуют, движение также может быть остановлено, по существу, немедленно. Соответствующий признак безопасности может удовлетворять "требованию безопасности при одиночной неисправности", означая, что любая неисправность одиночного компонента или неспособность обеспечить требуемую постоянную силу или индикацию должны привести к выключению/переводу системы в безопасное состояние и предотвратить последующую автоматическую операцию, пока соответствующая проблема не будет исправлена.
Настоящее изобретение может, в частности, обеспечить следующие признаки.
Двигатель может осуществлять поддержку при перемещении, управляемом вручную, может уменьшать силы, необходимые для работы по перемещению и/или позиционированию рентгеновской системы относительно объекта, подлежащего исследованию, до низкого уровня, по меньшей мере, существенно уменьшая силы для работы с системой. Эти уменьшения сил, требующихся для работы с системой, могут в результате приводить к более быстрому и/или более точному позиционированию рентгеновской системы или рентгеновского пучка.
Отдельный специализированный привод "разрешения движения", выключатель или кнопка могут не потребоваться.
Дополнительно, могут быть осуществлены заранее запрограммированные остановки. Другими словами, предпочтительное заданное позиционирование рентгеновской системы может быть с удобством запрограммировано и выполняться автоматически. Это может содержать возможность или выбор возвращения, то есть обратного движения в ранее использовавшиеся положения.
Кроме того, могут быть реализованы функциональные возможности остановки и удержания/отключения с использованием двигателя. Двигательный элемент или двигательное устройство могут быть запрограммированы на уменьшение сил для выполнения операций, например, учитывая воспринимаемую движущуюся массу и трение, создаваемое пользователем, но могут также ограничивать предельную скорость движения, используя торможение с гашением скорости или торможение с зависимостью от скорости.
Различные режимы работы, например режимы привода, такие как режим привода, режим муфты и/или режим отключения могут быть осуществлены с помощью единого компонента, соответственно программируя двигательное устройство. Однако всегда может существовать возможность ручного позиционирования рентгеновской системы, также или, в частности, когда двигательный элемент не приводится в действие. Все это может привести к системе, которая, по существу, безопасна, не имея возможности выхода системы из-под контроля пользователя или оператора.
Обычно двигательное устройство рентгеновских систем, в частности рентгеновских систем на основе C-образного кронштейна для получения медицинских изображений, основано на устройстве синхронного ремня. Синхронный ремень может прикрепляться к одному конструктивному элементу с двигательным элементом, установленном на другом конструктивном элементе, который может считаться подвижным относительно другого конструктивного элемента. Например, синхронный ремень системы с C-образным кронштейном может проходить от одного конца элемента C-образного кронштейна к другому концу и может устанавливаться, в частности, с сильным предварительным натяжением, чтобы получить достаточную жесткость привода.
Зубчатое ведущее колесо двигательного элемента, возможно, соединяется/входит в зацепление, например, с зубьями синхронного ремня, который подается, по меньшей мере, через два направляющих колеса от C-образного кронштейна к двигательному элементу, однако, в соответствии с дополнительным аспектом настоящего изобретения, может использоваться двойной ременный привод, то есть дополнительный вариант осуществления с приводом Омега. Двойные ременные приводы содержат, например, два ремня, оба из которых являются зубчатыми. Один ремень может быть напрямую присоединен к C-образному кронштейну, по существу, вдоль всей его длины, тогда как другой ремень устанавливается со спариванием зубьев, дополнительно размещаясь на двигательном элементе. По мере того как вал двигателя двигательного элемента вращается, ремень выходит из зацепления на одной стороне вблизи первого направляющего колеса и входит в зацепление на второй стороне, размещенной на втором направляющем колесе. Направляющие колеса или ролики гарантируют должное зацепление, не создавая ошибки. Таким образом, приводя в действие двигательный элемент, первый конструктивный элемент и второй конструктивный элемент могут двигаться относительно друг друга. Сила/натяжение ремня могут считаться существующими только в относительно малой зоне между двумя направляющими колесами, существенно уменьшая соответствующую длину ремня и способствуя созданию жесткости.
Части ремня, размещенные на валу двигателя, проходящие от направляющих колес или роликов к любой из сторон или к любому концу C-образного кронштейна, могут считаться не способствующими жесткости привода, и, таким образом, обычно для них не требуется предварительное натяжение, сравнимое с предварительным натяжением обычного привода Омега. Двойной ременный привод может, в частности, обеспечивать высокую жесткость устройства привода даже при ремнях с низкой нагрузочной способностью и отсутствующим или пониженным предварительным натяжением. Могут использоваться ремни малого размера, что в итоге приводит к компактной конструкции. Отсутствие или снижение предварительного натяжения может освободить C-образный кронштейн от какой-либо нагрузки. Подшипники, таким образом, могут быть малыми и компактными, возможность использования малого шага может повысить точность привода и жесткость ремня с точки зрения двигательного элемента или двигательного устройства может считаться постоянной по всему диапазону хода/максимально возможному перемещению.
Далее описываются дополнительные варианты осуществления настоящего изобретения, относящиеся, в частности, к узлу перемещения с поддержкой от двигательного привода. Однако следует понимать, что эти объяснения также относятся к рентгеновской системе, содержащей узел перемещения с поддержкой от двигательного привода, к способу перемещения с поддержкой от двигательного привода и к применению узла привода с поддержкой от двигательного привода.
Явно отмечается, что произвольные вариации и перестановки одиночных или многочисленных признаков между заявленными пунктами формулы изобретения, в частности между вариантами осуществления, связанными с пунктами формулы изобретения, относящимися к устройству, пунктами формулы изобретения, относящимися к способу, и пунктами формулы изобретения, относящимися к применению, являются потенциально возможными и находящимися в пределах объема и раскрытия настоящей патентной заявки.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, двигательный элемент может быть выполнен с возможностью определения вращающего момента, прикладываемого к двигательному устройству.
Другими словами, когда, например, элемент ручного управления используется для обеспечения индикации желаемого перемещения, индикация может привести в результате к поступательной или вращающей силе, действующей на двигательный элемент, в частности на вал двигательного элемента, способом, который может рассматриваться как попытка вращать вал двигательного элемента, прикладывая, таким образом, вращающий момент к двигательному элементу.
Эта попытка вращения вала двигательного элемента может, например, привести в результате к току, создаваемому внутри двигательного элемента, который может быть обнаружен в местах электрического подключения двигательного элемента, например, самим двигателем или последующей системой управления. Этот создаваемый ток может, таким образом, использоваться, чтобы обнаруживать вращающий момент, приложенный к двигательному устройству, возможно, приводя в результате к определенной реакции.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, двигательное устройство может быть двигательным устройством непосредственной передачи.
Двигательное устройство непосредственной передачи может рассматриваться как двигательное устройство, являющееся, по существу, механизмом без передаточных шестерен или без передаточного механизма, таким образом, вращение передается напрямую без необходимости обеспечения передаточного числа, что, в свою очередь, может потребовать дополнительных элементов, например элементов зубчатой передачи или трансмиссионной передачи, чтобы осуществлять перемещение, увеличивая, таким образом, точность при снижении требований к мощности двигательного устройства.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, двигательное устройство непосредственной передачи выполнено с возможностью наличия режима привода, режима муфты и/или режима отключения.
Режим привода может интерпретироваться как рабочий режим, в котором обеспечивается движение с поддержкой от двигательного привода. Режим муфты может рассматриваться как рабочий режим, в котором обеспечивается, по существу, свободное, без поддержки, в частности ручное, перемещение первого конструктивного элемента относительно второго конструктивного элемента. В режиме муфты мощность, по существу, может вообще не подаваться на двигательное устройство/двигательный элемент. В рабочем режиме отключения определенное положение первого конструктивного элемента относительно второго конструктивного элемента может удерживаться даже при внешних, возможно непредумышленных силах, действующих на конструктивные элементы. Режим отключения может, в частности, требовать определения абсолютного положения конструктивных элементов относительно друг друга. Также в режиме отключения перемещение с поддержкой от двигательного привода может замедляться, пока не будет достигнуто определенное положение, причем такое положение может в дальнейшем удерживаться, даже противодействуя дополнительной внешней силе.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, двигательный элемент является элементом бесщеточного двигателя.
Элемент бесщеточного двигателя может рассматриваться как двигательный элемент, который содержит электронно управляемую систему коммутации, в отличие от механической системы коммутации, основанной на щетках щеточного двигателя. В элементах бесщеточных двигателей ток и вращающий момент, с одной стороны, и приложенное напряжение и скорость вращения (число оборотов в минуту или RPM) могут считаться линейно связанными. Бесщеточные двигатели могут позволить предпочтительную характеристику непосредственной передачи двигательного элемента и двигательного устройства, соответственно.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, двигательное устройство может быть выполнено с возможностью поддержки перемещения второго конструктивного элемента за счет по меньшей мере частичного уменьшения воспринимаемого сопротивления второго конструктивного элемента перемещению, в частности, относительно первого конструктивного элемента.
Сопротивление перемещению может, в частности, быть связано с трением, ручной движущей силой и/или разбалансом второго конструктивного элемента относительно первого конструктивного элемента. Следует понимать, что на фактическое трение при разбалансе и/или на массу объекта, который должен двигаться, по сути, нельзя влиять, так как эти величины могут обеспечиваться за счет физических предпосылок, однако по меньшей мере воспринимаемое трение, масса и/или разбаланс объекта пользователем или оператором, пытающимся перемещать этот объект, могут быть уменьшены или снижены.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, устройство может дополнительно содержать элемент управления перемещением для управления движением второго конструктивного элемента относительно первого конструктивного элемента.
Элемент управления перемещением может, в частности, реагировать на силу/вращающий момент, прикладываемые к двигательному элементу, например, через элемент ручного управления, обнаруживая, таким образом, и/или определяя, таким образом, созданный ток, из которого может быть получена или определена индикация о желаемом перемещении. Элемент управления перемещением может затем помочь желаемому перемещению, например, приводя в действие двигательный элемент, чтобы, например, поддержать движение в том же самом направлении, что и желаемое движение.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, элемент управления перемещением может работать по меньшей мере в одном рабочем режиме из группы, содержащей режим вращающего момента, режим тока, режим скорости и режим положения.
В частности, режим вращающего момента и режим тока, так же как режим скорости и режим положения, могут объединяться друг с другом, чтобы получить, например, режим вращающего момента/тока и режим скорости/положения.
В режиме вращающего момента/тока может быть обнаружено желаемое перемещение, тогда как в режиме скорости/положения желаемое положение может быть обнаружено, закреплено и/или в дальнейшем поддерживаться.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, режим работы элемента управления перемещением может быть, по существу, мгновенно переключаемым.
В частности, режим работы может, по существу, мгновенно переключаться между режимом вращающего момента/тока и режимом скорости/положения. Это может позволить иметь сложное движение, в котором сначала желаемое движение указывается элементу управления движением для перехода в определенное положение с помощью переключения в режим положения, в котором определяется положение второго конструктивного элемента относительно первого конструктивного элемента, и затем, когда определено, что текущее положение соответствует желаемому положению, положение может удерживаться. Элемент управления перемещением может непрерывно переключаться между режимом вращающего момента/тока и режимом скорости/положения, пока желаемое положение не будет достигнуто.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, двигательное устройство может дополнительно содержать привод Омега и/или двойной ременный привод.
Соответствующий привод может позволить простое и в то же время эффективное движение первого конструктивного элемента относительно второго конструктивного элемента с повышенной точностью.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, двойной ременный привод может содержать подвижный ремень, установленный на двигательном устройстве, и неподвижный ремень, установленный на втором конструктивном элементе. Подвижный ремень и неподвижный ремень могут быть установлены с геометрическим замыканием и двигательное устройство может быть выполнено с возможностью движения второго конструктивного элемента относительно первого конструктивного элемента, приводя в действие подвижный ремень.
Соответствующий двойной ременный привод может позволить выполнение позиционирования с чрезвычайно высокой точностью, уменьшая, в то же время, силу или натяжение ременного устройства.
В соответствии с дополнительным примером варианта осуществления настоящего изобретения, устройство может дополнительно содержать по меньшей мере один элемент из группы, состоящей из элемента определения абсолютного положения для определения положения второго конструктивного элемента относительно первого конструктивного элемента, элемента определения силы, элемента определения давления, элемента определения веса и элемента определения наклона.
Элемент определения наклона может, в частности, быть одноосным или двуосным элементом определения наклона. Каждый из элементов определения может использоваться для определения параметра, влияющего на движение узла перемещения с поддержкой от двигательного привода. Соответствующие определенные параметры могут, в частности, использоваться элементом управления перемещением для управления перемещением с поддержкой. Параметры могут использоваться для перемещения с поддержкой без уведомления пользователя или оператора, приводя, таким образом, к предпочтительному естественному ручному управлению. Элементами определения могут быть, в частности, датчики.
Эти и другие аспекты настоящего изобретения станут очевидны и будут подробно объяснены со ссылкой на варианты осуществления, описанные далее.
Примеры вариантов осуществления настоящего изобретения будут описаны ниже со ссылкой на последующие чертежи.
Изображение на чертежах является схематическим. На разных чертежах подобные или идентичные элементы снабжаются подобными или идентичными ссылочными позициями.
Чертежи выполнены не в масштабе, однако могут представлять качественные соотношения.
Краткое описание чертежей
Фиг.1 - общий вид примера варианта осуществления системы с C-образным кронштейном, соответствующего настоящему изобретению;
Фиг.2 - общий вид примера варианта осуществления блока привода системы с C-образным кронштейном, показанной на фиг.1;
Фиг.3 - подробный вид примера варианта осуществления привода Омега, соответствующего настоящему изобретению;
Фиг.4 - схематический вид примера варианта осуществления элемента управления перемещением узла перемещения с поддержкой от двигательного привода, соответствующего настоящему изобретению;
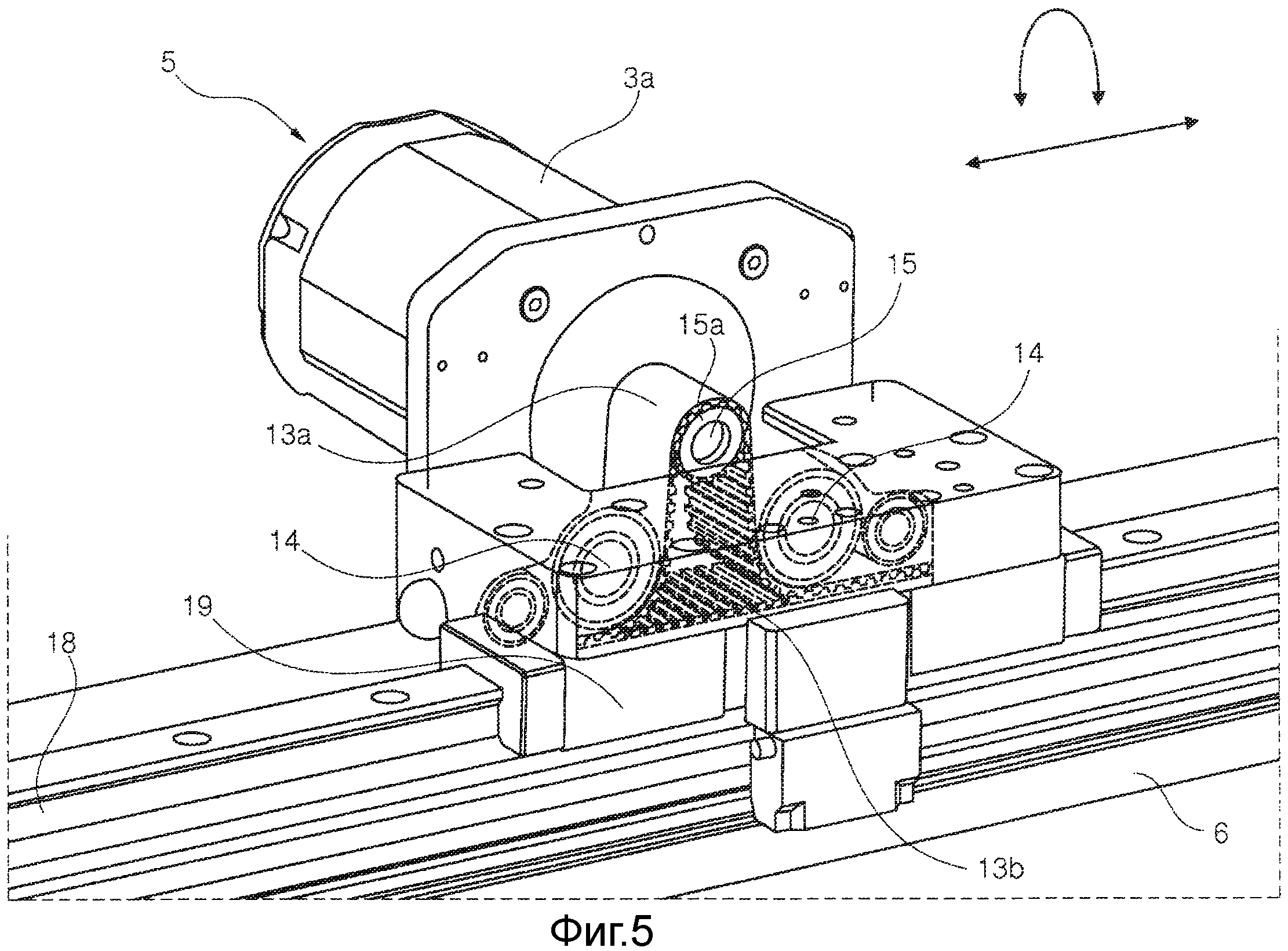
Фиг.5 - подробный вид примера варианта осуществления линейного двойного ременного привода, соответствующего настоящему изобретению;
Фиг.6 - общий вид примера варианта осуществления двойного ременного привода, установленного в системе с C-образным кронштейном, соответствующего настоящему изобретению;
Фиг.7 - общий вид примера варианта осуществления рентгеновской системы, соответствующего настоящему изобретению;
Фиг.8 - подробный вид части создания изображений рентгеновской системы, соответствующей фиг.4; и
Фиг.9 - общий вид примера варианта осуществления опоры для пациента, соответствующего настоящему изобретению.
Подробное описание вариантов осуществления
На фиг.1 представлен общий вид примера варианта осуществления системы с C-образным кронштейном, соответствующего настоящему изобретению.
Рентгеновская система 1 с C-образным кронштейном содержит устройство 8 генерации рентгеновского излучения, например рентгеновскую трубку и рентгеновский детектор 7, ориентированные в направлении друг друга и оперативно соединенные для создания рентгеновского изображения объекта. Как устройство 8 генерации рентгеновского излучения, так и рентгеновский детектор 7 устанавливаются на изогнутом C-образном элементе 16. На изогнутом C-образном элементе 16 устанавливается элемент 4 ручного управления, который на фиг.1 в качестве примера показан как рукоятка или поручень. На фиг.1 изогнутый C-образный элемент 16 может рассматриваться как образующий второй конструктивный элемент 6, тогда как корпус системы 1 с C-образным кронштейном может рассматриваться как образующий первый конструктивный элемент 5. Двигательное устройство 3 устанавливается в месте соединения между первым конструктивным элементом 5 и вторым конструктивным элементом 6, например между корпусом 24 рентгеновской системы 1 и изогнутым С-образным элементом 16. Корпус 24 может содержать дополнительный подвижный элемент 25, который на фиг. 1 в качестве примера показан как установленный для поднимания и опускания изогнутого С-образного элемента 16.
Корпус 24 дополнительно содержит элемент 10 управления перемещением, который функционально соединяется с приводами или двигателями, установленными на подвижном элементе 25 и в месте соединения между первым конструктивным элементом 5 и вторым конструктивным элементом 6 и дополнительно может управлять устройством 8 генерации рентгеновского излучения и рентгеновским детектором 7 для создания рентгеновских изображений.
Система 1 с C-образным кронштейном, соответствующая фиг.1, может, в частности, рассматриваться как мобильная рентгеновская система для хирургических применений. Изогнутый С-образный элемент 16 может вращаться вокруг двух осей, оси для установки под углом и оси вращения. Вместе с подвижным элементом 25 для регулировки высоты и возможности продольного движения мобильной рентгеновской системы 1 вращением всей рентгеновской системы 1, например на полу операционной, объект может располагаться в изоцентре, то есть точке пересечения оси для установки под углом и оси вращения.
Даже когда пользователь изменяет проекционный угол, вращая или устанавливая угол устройства 8 генерации рентгеновского излучения и рентгеновского детектора 7 вокруг объекта 9, подлежащего исследованию, интересующая точка объекта будет оставаться в центре изображения. В зависимости от конкретного применения для получения изображения, пользователь может решить выполнить перемещение двойной оси или одиночной оси, используя элемент 4 ручного управления. В случае, когда желательно перемещение только одиночной оси, ось, движение которой нежелательно, может блокироваться. Для последующего описания двигательный элемент перемещает изогнутый C-образный элемент 16 посредством перемещения для установки под углом.
Оператор использует элемент 4 ручного управления, чтобы обеспечить индикацию желаемого перемещения, например вращения изогнутого С-образного элемента 16 против часовой стрелки. Оператор может, таким образом, потянуть элемент 4 ручного управления вниз, в направлении пола операционной, соответственно указывая элементу 10 управления перемещением желаемое направление вращения против часовой стрелки.
Двигательное устройство 3 вместе с элементом 10 управления перемещением определяет, что индикация желаемого перемещения присутствует и, следовательно, элемент 10 управления перемещением подает сигнал на двигательное устройство 3, чтобы поддержать или помочь желаемому перемещению посредством приведения в действие двигательного элемента 3 для движения в том же самом направлении, здесь против часовой стрелки. Таким образом, от оператора, по существу, требуется только обеспечить начальную индикацию желаемого перемещения, возможно в ходе перемещения, поддерживающего индикацию желаемого перемещения, продолжая слегка нажимать на элемент 4 ручного управления в направлении желаемого перемещения, в то время как фактическая энергия для перемещения, чтобы переместить изогнутый С-образный элемент 16 против часовой стрелки или, по меньшей мере, ее часть обеспечивается двигательным устройством 3, в частности двигательным элементом 3a.
Теперь, со ссылкой на фиг.2 и 3, представляются общий вид примера варианта осуществления блока привода системы 1 с С-образным кронштейном, показанной на фиг.1, и подробный вид примера варианта осуществления привода 11 Омега, соответствующего настоящему изобретению.
На фиг.2 представлен основной принцип работы двигательного устройства 3 для двигателя, помогающего перемещению изогнутого элемента 16 в направлении установки под углом, таким образом, по часовой стрелке или против часовой стрелки относительно фиг.1.
C-образно изогнутый элемент 16 содержит ремень 13a, присоединенный к его концам, который проходит вдоль внешней дуги окружности C-образно изогнутого элемента 16, пока не достигнет видимого со стороны каждого конца направляющего колеса 14. Внешняя окружность направляющего колеса 14 устанавливается на расстоянии, по существу, равном внешней длине окружности зубчатого колеса 15a, установленного на валу 15 двигательного элемента.
Зубчатое колесо 15a может быть отдельным элементом, присоединяемым к валу 15 двигательного элемента, или может быть неотъемлемой частью вала 15 двигательного элемента. Благодаря вышеупомянутому расстоянию направляющих колес 14 друг от друга, зубчатый ремень 13a отклоняется, по существу, перпендикулярно от поверхности С-образно изогнутого элемента 16, проходя вокруг управляющих колес 14 к валу 15 двигательного элемента и его зубчатому колесу 15a.
Направляющие колеса 14 обычно имеют ровную поверхность для предпочтительного плавного движения зубчатого ремня 13a вокруг них. Сторона зубчатого ремня 13a, установленного на управляющих колесах 14 или вокруг них, является, про существу, плоской, тогда как поверхность зубчатого ремня 13a, который расположен рядом с поверхностью С-образно изогнутого элемента 16, и зубчатого колеса 15a вала 15 двигательного элемента, соответственно, обладает зубчатой формой, содержащей зубья и промежутки между зубьями или вдавливания между зубчатыми элементами зубчатого ремня 13a. Зубчатые элементы зубчатого ремня 13a имеют, по существу, прямоугольную форму и выполнены с возможностью сопряжения с зубьями, имеющимися на зубчатом колесе 15a вала 15 двигательного элемента, как следствие, обеспечивая геометрическое зацепление или точное сцепление зуба зубчатого ремня 13a и зуба зубчатого колеса 15a.
Двигательный элемент 3а устанавливается и присоединяется к первому конструктивному элементу 5, который может рассматриваться как, по существу, связанный с полом операционной, например, посредством стойки или корпуса 24. Теперь, когда двигательный элемент 3a вращает вал 15 двигательного элемента, вращая, таким образом, зубчатое колесо 15a, благодаря точной подгонке зубчатого колеса 15a и зубчатого ремня 13a, ремень 13a движется вдоль и над поверхностью зубчатого колеса 15a, и, таким образом, С-образно изогнутый элемент 16 поворачивается по часовой стрелке или против часовой стрелки относительно положения, показанного на фиг.1.
Таким образом, C-образный кронштейн 1 приводится в движение зубчатым ремнем 13a, который закрепляется на обоих концах С-образного кронштейна 1, и его зубья устанавливаются по внешнему диаметру или поверхности С-образно изогнутого элемента 16. Двигательный элемент 3a с его зубчатым колесом 15a устанавливается на первом конструктивном элементе 5 в месте соединения между первым конструктивным элементом 5 и вторым конструктивным элементом 6, как показано на фиг.2 для C-образно изогнутого элемента 16.
Направляющие колеса 14 направляют ремень по зубчатому колесу 15a. На одной стороне C-образного кронштейна 1 закрепление может обеспечиваться за счет натяжения, обеспечивая, таким образом, соответствующее натяжение зубчатого ремня 13a для очень точного движения без какого-либо люфта. Эффективность соответствующего привода Омега и также соответствующего двойного ременного привода достаточно высокая, чтобы система привода могла считаться образующей непосредственный привод.
Влиянием двигательного элемента 3a, когда на него не подано электропитание, например во время ручного управления в режиме муфты, требующем дополнительной силы для перемещения, можно пренебречь.
Сила, необходимая для управления пользователем или оператором, определяется трением, инерцией и некоторым остающимся разбалансом. Эти силы, хотя и не создают удобства и, возможно, являются слишком высокими для быстрого движения, все же могут считаться допустимыми для использования без поддержки двигателем.
Функция поддержки от двигателя, соответствующая настоящему изобретению, делает ручное управление легче и проще, прикладывая необходимую долю сил к нагрузке. Пользователь может все еще чувствовать трение и инерцию, но только со сниженным уровнем. Разбаланс может компенсироваться полностью.
На фиг.3 представлен привод Омега, показанный на фиг.2, однако дополнительно изображается кабель 17b кодера для приема обратной связи от двигателя, зависящей от вращающего момента, действующего на двигательный элемент 3a, или для определения положения, в частности абсолютного положения двигательного элемента 3a, который может быть, например, элементом 3a бесщеточного двигателя. Электропитание подается на двигательный элемент 3a через кабель 17a.
На фиг.4 теперь представлено схематическое изображение примера варианта осуществления элемента управления перемещением узла перемещения с поддержкой от двигательного привода, соответствующего настоящему изобретению.
Двигательное устройство 3 может быть, например, бесщеточным векторным управляемым двигательным устройством 3 переменного тока для приведения в действие рентгеновской системы 1 с С-образным кронштейном. Бесщеточный двигатель переменного тока (BLAC) может, в частности, использовать электронно управляемую систему коммутации с синусными векторами. Соответствующий тип двигателя может обеспечивать непрерывный четырехквадрантный вращающий момент и диапазон скоростей, начиная от нуля.
Двигательный элемент 3а принимает пусковую мощность через усилитель Kt и обеспечивает обратную связь относительно своего положения с помощью абсолютного кодера обратной связи по положению для коммутации и сервоуправления. Согласно фиг.4, могут быть установлены два основных режима, описанных как режим A, режим ПИД или положения, и режим B, режим вращающего момента/тока. Контроллер серводвигателя обеспечивает такие функции, как бесщеточное управление коммутацией переменного тока, контур управления вращающим моментом/током, контур управления положением (ПИД) и механизм переключения контура управления "на лету".
Усилитель может обеспечивать электронную коммутацию и контур управления током. Благодаря вращающему моменту двигателя, возможно, пропорциональному току (Kt), может быть достигнуто управление вращающим моментом. Управление ПИД может реагировать на сигнал ошибки по положению, чтобы минимизировать его. Чтобы этого достигнуть, контроллер ПИД может подавать пропорциональные, интегрированные и дифференцированные значения сигнала ошибки. Переключение в режиме "на лету" может гарантировать, что во время переходного процесса ничего не будет чувствоваться. Это может быть достигнуто, плавно увеличивая или уменьшая три параметра ПИД.
Принцип управления представлен на блок-схеме, приведенной на фиг.4, где приводится краткий обзор всех функций контроллера двигателя. Функции располагаются в сервоконтроллере и в элементе управления. Усилитель обеспечивает коммутацию и контур управления. Текущая установочная точка создается контроллерами ПИД и упреждающим смещением. Обратная связь по положению двигателя может обеспечиваться посредством абсолютного кодера с высокой разрешающей способностью.
В случае, когда обеспечивается система с упреждающим управлением, установленный ток может определяться алгоритмом упреждающего управления, в частности, зависящего от положения, скорости и ускорения установочных точек и массы, демпфирования, трения и параметров разбаланса. В этом случае, установочный ток может, в частности, равняться току смещения. Контроллер ПИД может корректировать отклонения модели с опережающим управлением.
В режиме ПИД или положении или режиме управления положением, скоростью переключатели в элементе "переключатель ввода действия/установки" и "включение/выключение ПИД" в сервоконтроллере устанавливаются в положение "режим А". Алгоритм опережающего управления может вычислить или определить ожидаемый ток двигателя, основываясь, например, на физической модели движения. Модель может содержать такие параметры, как трение, демпфирование, масса и разбаланс, и может обращаться к соответствующим физическим формулам. Если моделирование совпадает, в частности, по существу, полностью совпадает с моделированной реальной системой, вмешательство со стороны контроллера ПИД в установку тока для усилителя может не требоваться. В этом, чисто теоретическом, случае движение С-образно изогнутого элемента может следовать по требуемой или желаемой траектории без поддержки со стороны контроллера ПИД. Соответствующая модель может также использоваться в качестве ссылки для установки поддержки в режиме поддержки.
Во время режима поддержки управление ПИД выключается и установочные точки перемещения заменяются фактическими установочными точками с выхода фильтра дифференцирующего устройства, в противоположность режиму ПИД, в котором соответствующие значения обеспечиваются генератором установочных точек. В режиме поддержки механизм опережающего управления может оставаться действующим, но величина может быть уменьшена до требуемого уровня поддержки. В режиме поддержки может полностью добавляться опережающее управление по разбалансу. Введение демпфирования может использоваться, чтобы избежать слишком высокой ручной скорости, например, обеспечивая противодействующую силу, которая может в результате привести к существенному снижению механической выходной мощности двигателя или поддерживаемому перемещению или даже противодействию или даже движению в противоположном направлении в случае, когда Pd может быть даже ниже нуля.
С помощью параметров восприятия или коэффициентов Pm, Pd и Pf требуемая или желаемая поддержка может регулироваться. В режиме поддержки эти параметры могут быть между 0 и меньше чем 1, тогда как в режиме ПИД параметры могут быть равны 1. Допустимый диапазон коэффициентов составляет от 0 до 1, с учетом граничных значений.
Фактические скорость и ускорение получаются дифференцированием и фильтрацией фактического сигнала обратной связи по положению, что выполняется в фильтре дифференцирующего устройства. Движение может, в частности, активироваться, когда контроллер движения обнаруживает изменение положения.
Кроме того, может быть осуществлено предпочтительное позиционирование. Используя режим поддержки, может быть осуществлена остановка в заданных положениях. Пользователь обеспечивает ручную индикацию желаемого направления перемещения, в направлении которого может располагаться программируемое положение. Вблизи этого положения управление может автоматически блокироваться контроллером положения ПИД, чтобы принудительно произвести плавную и точную остановку в заранее запрограммированном положении. Контроллер режима пользователя обеспечивает плавное переключение режима управления от токового контура к контуру ПИД. После того как движение остановлено, режим поддержки снова может стать доступным.
Дополнительно, может быть осуществлен режим отключения, который, по существу, эквивалентен остановке в заданном положении, как описано ранее. Кроме того, функция удержания/отключения может быть осуществлена удержанием положения в режиме ПИД с помощью двигателя, активируемого, только когда покидается положение отключения.
Элемент управления, показанный на фиг.4, содержит дополнительный вспомогательный компонент упреждающего управления на случай, когда, например, должен также управляться стол для пациента или в случае, если должна быть также учтена информация о положении стола для пациента.
Вспомогательный входной сигнал опережающего управления может использоваться для компенсации дополнительных силовых возмущений из-за внешних воздействий, например из-за наклона системы или изменений по мере исследования объекта. Компенсация, в частности, может быть выполнена на опоре для пациента или столе для пациента, как будет описан позже со ссылкой на фиг.9.
Теперь, на фиг.5 показан подробный вид примера варианта осуществления линейного двойного ременного привода 12, соответствующего настоящему изобретению.
На фиг.5 показано устройство 12 двойного ременного привода, здесь как линейного осевого привода. Основным отличием от привода 11 Омега, как он описан ранее, может считаться добавление второго зубчатого ремня 13b, по существу, по всей рабочей длине устройства привода. Оба зубчатые ремня 13a, 13b, также называемые синхронными ремнями, находятся в точном зацеплении или совпадении зубьев по всему диапазону перемещения, за исключением расстояния или промежутка между двумя направляющими колесами 14, где зубчатый ремень 13a обертывается вокруг зубчатого колеса 15a вала двигательного элемента 15.
Соответствующее устройство привода может позволить, по существу, ненатянутый зубчатый ремень 13a в области от направляющих колес 14 до конца диапазона перемещения с силой или натяжением, существующим в ремне 13a только в небольшой зоне между двумя управляющими колесами 14 и зубчатым колесом 15a. С помощью соответствующего двойного ременного привода 12 двигательного элемента 3a, к которому может быть прикреплен первый конструктивный элемент 5, может перемещаться вокруг второго конструктивного элемента 6. Для легкого и относительно свободного от трения перемещения направляющий элемент 18 прикрепляется ко второму конструктивному элементу 6, и направляемый элемент 19 прикрепляется к двигательному элементу 3a, таким образом, первый конструктивный элемент 5 располагается под зубчатыми ремнями 13a, b, как показано на фиг.5, чтобы обеспечить возможность линейного перемещения.
В случае, показанном на фиг.5, поперечное перемещение направляемого элемента 19 относительно направляющего элемента 18 вызывается вращением двигательного элемента 3a, в частности валом 15 двигательного элемента с зубчатым колесом 15a. С помощью соответствующего вращательного движения зубчатого колеса 15a, зубчатый ремень 13a тянется в направлении двигательного элемента 3a на одной стороне зубчатого колеса 15a, в то же время оттягиваясь от двигательного элемента 3 на противоположной стороне, со сторонами в зависимости от направления вращения. Это движение отклоняется направляющими колесами 14, чтобы достигнуть поперечного движения, вызванного движением вверх/вниз зубчатого ремня 13a, и, таким образом, вращательного движения зубчатого колеса 15a. В случае, если движение второго конструктивного элемента 6 в направлении правой стороны на фиг.5 является намеренным, зубчатое колесо 15a может вращаться по часовой стрелке, когда предполагается зафиксированное положение первого конструктивного элемента 5.
На фиг.6 представлен общий вид примера варианта осуществления двойного ременного привода, установленного в системе с C-образным кронштейном в соответствии с настоящим изобретением.
На фиг.6 двойной ременный привод 12 выполнен с возможностью обеспечения движения вращения для установки под углом С-образно изогнутого элемента 16 по сравнению с фиг.1. Зубчатый ремень 13b может быть прикреплен, по существу, по всей внешней дуге окружности С-образно изогнутого элемента 16. Зубчатый ремень 13b может быть прикреплен к С-образно изогнутому элементу 16, по существу, по всей его длине или, из-за искривления поверхности С-образно изогнутого элемента, может прикрепляться только в его соответствующих концевых точках. Второй зубчатый ремень 13a или сопряженный ремень располагается непосредственно над зубчатым ремнем 13b, с зубьями ремня, обращенными друг к другу, возможно являясь точно подогнанными от направляющих колес 14 до соответствующих концов С-образно изогнутого элемента 16.
Между управляющими колесами 14 зубчатый ремень 13a накручивается вокруг зубчатого колеса 15a двигательного элемента 3a. Подобно линейному осевому приводу, показанному на фиг.5, синхронный ремень с относительно малыми возможностями может быть расположен на обратной стороне С-образно изогнутого элемента 16, например, сцепленным с внешней поверхностью С-образно изогнутого элемента 16, с другим ремнем 13a, зубчато сопряженным с зубчатым ремнем 13b. Оба ремня, прикрепленный ремень 13b и плавающий ремень 13a, фиксируются на соответствующих концах С-образно изогнутого элемента 16, однако, без какого-либо или, по меньшей мере, со сниженным предварительным натяжением. Зубчатый ремень 13a образует петлю вокруг зубчатого колеса 15a двигательного элемента 3 подобно приводу Омега, показанному на фиг.2 и 3.
Теперь, на фиг.7 представлен общий вид примера варианта осуществления рентгеновской системы, соответствующего настоящему изобретению.
Рентгеновская система 21 содержит установленную на потолке рентгеновскую систему 1 с С-образным кронштейном, содержащую устройство 8 генерации рентгеновского излучения и рентгеновский детектор 7. На опоре 20 для пациента объект 9 устанавливается в изоцентре или по меньшей мере на пути между устройством 8 генерации рентгеновского излучения и рентгеновским детектором 7.
Рентгеновская система 21 управляется элементом 10 управления движением, возможно, дополнительно управляющим параметрами получения изображения.
Установленная на потолке рентгеновская система 1 с С-образным кронштейном содержит многочисленные подвижные элементы 25, которые реализуются как узлы 2a-2d перемещения с поддержкой от двигательного привода. Узел 2a с поддержкой от двигательного привода может обеспечивать перемещение для установки под углом С-образного кронштейна, тогда как узел 2b перемещения с поддержкой от двигательного привода может обеспечивать вращение C-образного кронштейна относительно положения, показанного на фиг.1.
Узел 2d перемещения с поддержкой от двигательного привода может обеспечивать изменение расстояния между устройством 8 генерации рентгеновского излучения и рентгеновским детектором 7. Узел 2c перемещения с поддержкой от двигательного привода может позволить двумерное линейное движение рентгеновской системы 1 с C-образным кронштейном, по существу, параллельное потолку, то есть потолочной опорной конструкции рентгеновской системы 1 с C-образным кронштейном, и может также обеспечивать дополнительную возможность вращательного движения вокруг оси, по существу, перпендикулярной потолку или потолочной опорной конструкции. Дополнительная способность движения для регулировки высоты рентгеновской системы 1 с C-образным кронштейном относительно опоры 20 для пациента может быть осуществлена в узле 2c или 2b перемещения с поддержкой от двигательного привода.
Дополнительно, опора 20 для пациента может обеспечивать регулировку высоты. Все движущиеся элементы 25 или узла 2a-2d перемещения с поддержкой от двигательного привода могут управляться вручную пользователем или могут приводиться в действие автоматически элементом 10 управления перемещением.
Теперь на фиг.8 будет представлен подробный вид части создания изображения в рентгеновской системе, соответствующей фиг.4.
Рентгеновская система 1 с С-образным кронштейном, показанная на фиг.7, содержащая устройство 8 генерации рентгеновского излучения и рентгеновский детектор 7, показана под другим углом. Также показана соответствующая свобода движения каждого подвижного элемента 25 или узла 2a-2d перемещения с поддержкой от двигательного привода.
Элемент 4 ручного управления может, в частности, влиять на узел 2с перемещения с поддержкой от двигательного привода для осуществления поступательного и вращательного движения. Дополнительные элементы ручного управления могут обеспечиваться для движений, поддерживаемых узлами 2a, 2b и 2d перемещений с поддержкой от двигательного привода, которые, однако, не показаны на фиг.8.
Рентгеновская система 1 с C-образным кронштейном может двигаться, например, по рельсам, установленным на потолке, в продольном направлении, возможно, обеспечивая двумерное движение, параллельное потолку операционной. Она может двигаться посредством двигателя или управляться вручную. Пример рентгеновской системы 1 с С-образным кронштейном может регулярно испытывать весовую нагрузку более 1000 кг и, таким образом, необходимая сила для работы с ней в чисто ручном, без поддержки, режиме может быть чрезвычайно высокой.
Следовательно, узел перемещения с поддержкой от двигательного привода может быть полезным. В такой реализации рентгеновская система 1 с C-образным кронштейном может крепиться к направляемым элементам 19, которые могут двигаться вдоль направляющих элементов 18. Зубчатые ремни 13a, b могут прикрепляться к концам направляющих элементов 18, например рельсам, выполненным с возможностью согласования движения направляемых элементов 19, например продольной каретки. Остальные возможности движения, в частности движение с поддержкой от двигательного привода, могут рассматриваться, как описано выше.
Теперь, на фиг.9 представлен общий вид примера варианта осуществления поддержки для пациента, соответствующего настоящему изобретению.
На фиг.9 опора 20 для пациента содержит элемент 22 определения наклона, выполненный с возможностью определения наклона по одной или двум осям, и элемент 23 определения силы, давления или массы, например датчик веса. Объект 9, который должен быть исследован, располагается на подвижной кушетке для пациента, которая может перемещаться в двух измерениях, как показано двумя пересекающимися стрелками.
Верхняя поверхность опоры 10 для пациента может плавно перемещаться вручную в поперечном и продольном направлениях. Благодаря жесткости основания стола прогиб при наклоне может происходить в вытянутых положениях верхней поверхности, в частности, когда это сочетается с тяжелыми объектами 9, подлежащими исследованию, приводя в результате к силе, создающей разбаланс в продольном направлении.
Однако, для определенных медицинских вмешательств, точное расположение является обязательным. Ручное перемещение с поддержкой может компенсировать прогиб при наклоне и может уменьшать трение, а также объемные силы, связанные с опорой 20 для пациента.
Продольное и/или поперечное перемещение стола для пациента можно сравнить с движением рентгеновской системы 1 с С-образным кронштейном, показанной на фиг.7 и 8, за исключением ситуации дополнительного разбаланса из-за веса объекта 9. Сила, создающая разбаланс, может определяться углом наклона, определенным элементом 22 определения наклона, и массой объекта 9, определенной датчиком 23 силы.
Элемент 22 определения наклона или датчик угла может измерить отклонение относительно горизонтального конца, в то время как элемент определения силы или датчик силы может измерить силу в вертикальном направлении. Вычисление или произведение массы, гравитационного ускорения и синуса угла прогиба при наклоне может обеспечить силу, возникающую при разбалансе. Это значение или параметр может использоваться в качестве вклада, вносимого поддержкой двигателем за счет вспомогательного опережающего управления, показанного на фиг.4. Измеренная масса может также использоваться для компенсации массы. Механизм, показанный на фиг.9, может обеспечивать оптимальную поддержку, независимо от веса или положения объекта 9, подлежащего исследованию.
Хотя в ходе описания двигательный элемент 3а может, в частности, быть установлен в первом конструктивном элементе 5 и элемент 4 ручного управления может, в частности, быть установлен во втором конструктивном элементе 6, следует понимать, что изменение или обмен местами также возможны. Другими словами, двигательный элемент 3a может также быть установлен во втором конструктивном элементе 6, а элемент 4 ручного управления может также быть установлен в первом конструктивном элементе 5.
Следует отметить, что термин "содержащий" не исключает другие элементы или этапы и что единственное число не исключает множественное число. Также элементы, описанные в связи с разными вариантами осуществления, могут объединяться.
Следует также отметить, что ссылочные позиции в формуле изобретения не должны рассматриваться как ограничение объема формулы изобретения.
Ссылочные позиции
1 - Рентгеновская система с C-образным кронштейном
2 - Узел перемещения с поддержкой от двигательного привода
3 - Двигательное устройство
3а - Двигательный элемент
4 - Элемент ручного управления
5 - Первый конструктивный элемент
6 - Второй конструктивный элемент
7 - Рентгеновский детектор
8 - Устройство генерации рентгеновского излучения
9 - Объект
10 - Элемент управления перемещением
11 - Привод Омега
12 - Двойной ременный привод
13, a, b - Зубчатый ремень
14 - Направляющее колесо/ролик
15 - Вал двигательного элемента
15a - Зубчатое колесо
16 - С-образно изогнутый элемент
17, a, b - Кабель
18 - Направляющий элемент
19 - Направляемый элемент
20 - Опора для пациента
21 - Рентгеновская система
22 - Элемент определения наклона
23 - Элемент определения силы/давления/массы
24 - Корпус
25 - Подвижный элемент
Реферат
Изобретение относится к медицинской технике, а именно к средствам генерации рентгеновского излучения. Узел перемещения с поддержкой от двигательного привода содержит первый конструктивный элемент, второй конструктивный элемент, элемент управления перемещением второго конструктивного элемента относительно первого и двигательное устройство, содержащее двигательный элемент, при этом первый и второй конструктивные элементы выполнены с возможностью перемещения относительно друг друга, а двигательное устройство установлено на первом конструктивном элементе. Второй конструктивный элемент выполнен с возможностью приема ручной индикации его желаемого перемещения относительно первого конструктивного элемента, при этом ручная индикация является силой, прилагаемой оператором ко второму конструктивному элементу, результатом чего является вращающий момент на двигательном элементе. Двигательный элемент выполнен с возможностью создания тока в соответствии с указанным вращающим моментом, определяет который элемент управления перемещением. Рентгеновская система по первому варианту выполнения содержит устройство генерации рентгеновского излучения, рентгеновский детектор и узел перемещения с поддержкой от двигательного привода, при этом устройство генерации рентгеновского излучения и рентгеновский детектор установлены на втором конструктивном элементе и оперативно связаны, а узел перемещения с поддержкой от двигательного привода перемещает устройство генерации рентгеновского излучения и/или рентгеновский детектор вокруг объекта. Во втором варианте выполнения рентгеновская система имеет узел п
Формула
первый конструктивный элемент (5),
второй конструктивный элемент (6),
элемент (10) управления перемещением для управления перемещением второго конструктивного элемента (6) относительно первого конструктивного элемента (5), и
двигательное устройство (3), содержащее двигательный элемент (3а);
при этом первый конструктивный элемент (5) и второй конструктивный элемент (6) выполнены с возможностью перемещения относительно друг друга;
при этом двигательное устройство (3) установлено на первом конструктивном элементе (5);
при этом второй конструктивный элемент (6) выполнен с возможностью приема ручной индикации желаемого перемещения второго конструктивного элемента (6) относительно первого конструктивного элемента (5), при этом ручная индикация является силой, прилагаемой оператором ко второму структурному элементу (6), результатом чего является вращающий момент на двигательном элементе (3а);
при этом двигательный элемент (3а) выполнен с возможностью создания тока в соответствии с указанным вращающим моментом,
при этом элемент (10) управления перемещением выполнен с возможностью определения желаемого перемещения путем определения тока, созданного двигательным элементом (3а), и с возможностью поддержки желаемого перемещения путем приведения в действие двигательного элемента (3а).
подвижный ремень (13а), установленный на двигательном устройстве (5); и
неподвижный ремень (13b), установленный на втором конструктивном элементе (6);
при этом подвижный ремень (13а) и неподвижный ремень (13b) установлены с геометрическим замыканием; и
при этом двигательное устройство (3) выполнено с возможностью перемещения второго конструктивного элемента (6) относительно первого конструктивного элемента (5) посредством приведения в движение подвижного ремня (13а).
устройство (8) генерации рентгеновского излучения,
рентгеновский детектор (7), и
узел (2) перемещения с поддержкой от двигательного привода по меньшей мере по одному из пп. 1-12, при этом устройство (8) генерации рентгеновского излучения и рентгеновский детектор (7) установлены на втором конструктивном элементе (6) и оперативно связаны для получения рентгеновских изображений объекта (9), подлежащего исследованию; и
при этом узел (2) перемещения с поддержкой от двигательного привода выполнен с возможностью перемещения устройства (8) генерации рентгеновского излучения и/или рентгеновского детектора (7) вокруг объекта (9).
узел (2) перемещения с поддержкой от двигательного привода по меньшей мере по одному из пп. 1-10, при этом узел (2) перемещения с поддержкой от двигательного привода выполнен с возможностью перемещения системы (20) поддержки пациента, опоры для пациента или верхней поверхности стола опоры для пациента.
Комментарии