Устройство и способ отображения транспортного средства - RU2675719C1
Код документа: RU2675719C1
Чертежи



Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству и способу отображения транспортного средства, которые, когда рассматриваемое транспортное средство едет за движущимся впереди транспортным средством, отображают выделяемый индикатор поверх движущегося впереди транспортного средства в форме наложения.
Уровень техники
[0002] Патентный документ 1 раскрывает традиционное устройство отображения транспортного средства, адаптированное для автономной системы оптимального регулирования скорости, которая обеспечивает возможность рассматриваемому транспортному средству ехать за движущимся впереди транспортным средством, движущимся впереди. Устройство отображения транспортного средства, раскрытое в патентном документе 1, использует дисплей на лобовом стекле для того, чтобы выделять целевое для следования за ним движущееся впереди транспортное средство посредством наложения выделяемого индикатора поверх движущегося впереди транспортного средства.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2005-67514
Раскрытие изобретения
Техническая задача
[0004] Тем не менее вышеописанное традиционное устройство отображения транспортного средства приводит к такой проблеме, что когда целевое для следования за ним движущееся впереди транспортное средство оказывается на большом расстоянии от рассматриваемого транспортного средства, выделяемый индикатор, накладываемый поверх движущегося впереди транспортного средства, становится меньше, затрудняя распознавание выделяемого индикатора для водителя.
[0005] Таким образом, настоящее изобретение предложено в свете вышеописанных обстоятельств и нацелено на предоставление устройства и способа отображения транспортного средства, которые обеспечивают возможность водителю легко распознавать выделяемый индикатор, даже когда целевое для следования за ним движущееся впереди транспортное средство находится на большом расстоянии от рассматриваемого транспортного средства.
Решение задачи
[0006] Чтобы разрешать вышеописанную проблему, устройство и способ отображения транспортного средства согласно аспекту настоящего изобретения обнаруживают движущееся впереди транспортное средство, движущееся впереди рассматриваемого транспортного средства, вычисляют расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством и задают выделяемый индикатор таким образом, что он отображается поверх движущегося впереди транспортного средства в форме наложения. Устройство отображения транспортного средства делает уровень выделения выделяемого индикатора более высоким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является большим, чем тогда, когда расстояние является небольшим, и отображает изображение такого заданного выделяемого индикатора в области отображения, предоставленной таким образом, что она перекрывается с позицией лобового стекла рассматриваемого транспортного средства.
Преимущества изобретения
[0007] Настоящее изобретение обеспечивает возможность водителю легко распознавать выделяемый индикатор, даже когда целевое для следования за ним движущееся впереди транспортное средство находится на большом расстоянии от рассматриваемого транспортного средства.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства отображения транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру обработки для обработки отображения меток для следования, выполняемую посредством устройства отображения транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 3 является схемой, иллюстрирующей пример метки для следования, отображаемой посредством устройства отображения транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 4 является схемой, иллюстрирующей то, как метка для следования отображается посредством устройства отображения транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 5 является схемой, иллюстрирующей то, как метка для следования отображается посредством устройства отображения транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 6 является схемой, иллюстрирующей то, как метка для следования отображается посредством устройства отображения транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 7 является схемой, иллюстрирующей модификацию того, как метка для следования отображается посредством устройства отображения транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг. 8 является схемой, иллюстрирующей модификацию того, как метка для следования отображается посредством устройства отображения транспортного средства согласно варианту осуществления настоящего изобретения.
Осуществление изобретения
[0009] Ниже описывается вариант осуществления, к которому применяется настоящее изобретение, со ссылкой на чертежи.
[0010] Конфигурация устройства отображения транспортного средства
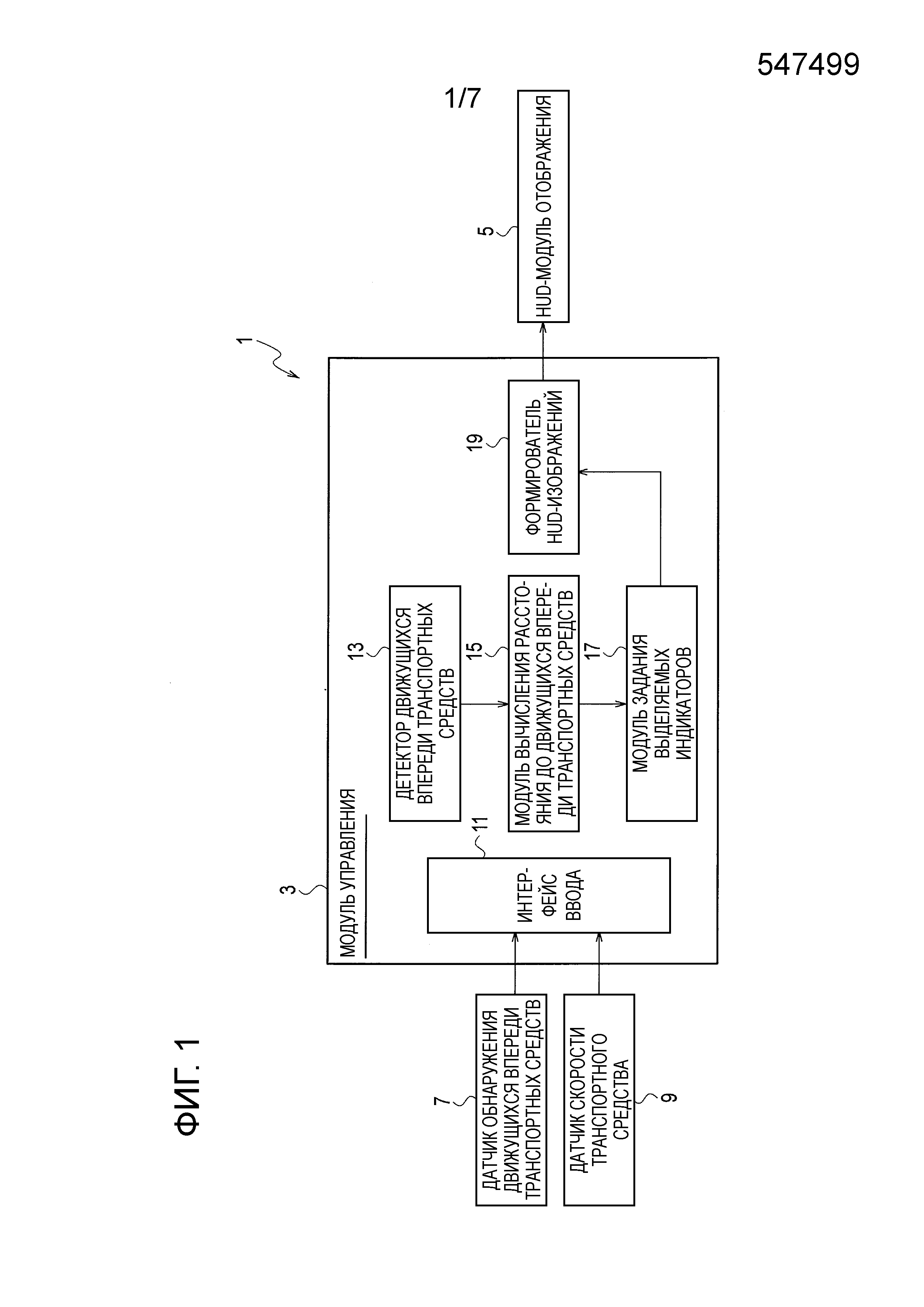
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства отображения транспортного средства согласно настоящему варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 1 отображения транспортного средства согласно настоящему варианту осуществления включает в себя модуль 3 управления и HUD-модуль 5 отображения. Дополнительно, устройство 1 отображения транспортного средства соединяется с датчиками и т.п., смонтированными на транспортном средстве, и, в частности, соединяется с датчиком 7 обнаружения движущихся впереди транспортных средств и датчиком 9 скорости транспортного средства. Устройство 1 отображения транспортного средства с такой конфигурацией монтируется на транспортном средстве, и транспортное средство со смонтированным устройством 1 отображения транспортного средства оснащено такой системой, как автономная система оптимального регулирования скорости или адаптивная система оптимального регулирования скорости, для следования за движущимся впереди транспортным средством, находящимся впереди рассматриваемого транспортного средства. Устройство 1 отображения транспортного средства представляет собой устройство, которое отображает выделяемый индикатор через лобовое стекло транспортного средства с использованием дисплея на лобовом стекле (HUD) посредством наложения выделяемого индикатора поверх целевого для следования за ним движущегося впереди транспортного средства.
[0011] Модуль 3 управления представляет собой контроллер, который управляет выделяемым индикатором и выводит изображение выделяемого индикатора в HUD-модуль 5 отображения. Модуль 3 управления включает в себя интерфейс 11 ввода, детектор 13 движущихся впереди транспортных средств, модуль 15 вычисления расстояния до движущихся впереди транспортных средств, модуль 17 задания выделяемых индикаторов и формирователь 19 HUD-изображений.
[0012] Интерфейс 11 ввода соединяется с датчиками и т.п., смонтированными на транспортном средстве, в частности, с датчиком 7 обнаружения движущихся впереди транспортных средств и датчиком 9 скорости транспортного средства, и передает и принимает данные, необходимые для управления выделяемым индикатором.
[0013] Детектор 13 движущихся впереди транспортных средств обнаруживает движущееся впереди транспортное средство, движущееся впереди рассматриваемого транспортного средства. В частности, детектор 13 движущихся впереди транспортных средств получает информацию движущихся впереди транспортных средств из датчика 7 обнаружения движущихся впереди транспортных средств и обнаруживает целевое для следования за ним движущееся впереди транспортное средство на основе изображения окружения впереди рассматриваемого транспортного средства, результатов радарных измерений и/или т.п., включенных в информацию движущихся впереди транспортных средств.
[0014] Модуль 15 вычисления расстояния до движущихся впереди транспортных средств вычисляет расстояние между движущимся впереди транспортным средством, обнаруженным посредством детектора 13 движущихся впереди транспортных средств, и рассматриваемым транспортным средством. В частности, модуль 15 вычисления расстояния до движущихся впереди транспортных средств может вычислять расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством посредством анализа изображения камеры переднего вида, включенной в датчик 7 обнаружения движущихся впереди транспортных средств, или может вычислять расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством на основе результатов измерений радара, включенного в датчик 7 обнаружения движущихся впереди транспортных средств.
[0015] Модуль 17 задания выделяемых индикаторов задает выделяемый индикатор таким образом, что он отображается поверх целевого для следования за ним движущегося впереди транспортного средства в форме наложения, и делает уровень выделения выделяемого индикатора более высоким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является большим, чем тогда, когда расстояние является небольшим. Модуль 17 задания выделяемых индикаторов сначала задает позицию отображения, размер отображения, пространственную частоту, яркость и/или т.п. метки для следования, которая должна отображаться в качестве выделяемого индикатора. Модуль 17 задания выделяемых индикаторов затем делает уровень выделения такой заданной метки для следования более высоким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является большим, чем тогда, когда расстояние является небольшим. Например, модуль 17 задания выделяемых индикаторов повышает уровень выделения посредством увеличения размера метки для следования по мере того, как расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством увеличивается. Альтернативно, модуль 17 задания выделяемых индикаторов может повышать уровень выделения посредством увеличения пространственной частоты или яркости метки для следования по мере того, как расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством увеличивается. Следует отметить, что метка для следования представляет собой метку индикатора, используемую для того, чтобы выделять целевое для следования за ним движущееся впереди транспортное средство, и отображается в форме наложения около движущегося впереди транспортного средства, в позиции, смежной (например, ниже) с движущимся впереди транспортным средством.
[0016] Дополнительно, в случае если расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством составляет предварительно определенное расстояние или меньше, модуль 17 задания выделяемых индикаторов делает уровень выделения выделяемого индикатора более низким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является небольшим, чем тогда, когда расстояние является большим. Например, модуль 17 задания выделяемых индикаторов понижает уровень выделения посредством уменьшения размера метки для следования по мере того, как расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством уменьшается. Альтернативно, модуль 17 задания выделяемых индикаторов может понижать уровень выделения посредством уменьшения пространственной частоты или яркости метки для следования по мере того, как расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством уменьшается.
[0017] Формирователь 19 HUD-изображений формирует изображения дисплея на лобовом стекле для отображения метки для следования, которая представляет собой выделяемый индикатор, согласно настройкам, выполняемым посредством модуля 17 задания выделяемых индикаторов.
[0018] Следует отметить, что модуль 3 управления формируется посредством электронной схемы общего назначения, включающей в себя микрокомпьютер, микропроцессор и CPU и периферийное устройство, к примеру, запоминающее устройство. Посредством выполнения конкретных программ, модуль 3 управления работает в качестве вышеописанного детектора 13 движущихся впереди транспортных средств, модуля 15 вычисления расстояния до движущихся впереди транспортных средств, модуля 17 задания выделяемых индикаторов и формирователя 19 HUD-изображений.
[0019] HUD-модуль 5 отображения представляет собой дисплей на лобовом стекле, включающий в себя проектор для проецирования изображений, экран и зеркала Френеля для отражения изображений и т.п., и выполнен с возможностью отображать изображение выделяемого индикатора в области отображения, предоставленной таким образом, что она перекрывается с позицией лобового стекла транспортного средства. В частности, HUD-модуль 5 отображения представляет собой дисплей на лобовом стекле, допускающий отображение изображения поверх окружения в передней части транспортного средства в форме наложения посредством проецирования отражаемого от зеркала изображения за пределами лобового стекла в качестве виртуального изображения. Тем не менее, HUD-модуль 5 отображения не ограничен дисплеем на лобовом стекле такого типа. Например, HUD-модуль 5 отображения может иметь комбинированный тип с использованием прозрачной панели вместо лобового стекла для того, чтобы отображать изображение, либо тип, отображающий изображение непосредственно на лобовом стекле. Другими словами, дисплей на лобовом стекле настоящего варианта осуществления должен только допускать отображение информации посредством наложения информации поверх окружения, которое водитель видит через лобовое стекло, без опускания головы водителя. Следует отметить, что HUD-модуль 5 отображения соответствует модулю отображения в пункте 1 формулы изобретения.
[0020] Датчик 7 обнаружения движущихся впереди транспортных средств представляет собой датчик для обнаружения движущегося впереди транспортного средства, такой как камера переднего вида или радар миллиметрового диапазона, и выводит информацию движущихся впереди транспортных средств, включающую в себя изображение камеры переднего вида или результаты измерений радара миллиметрового диапазона. Помимо камеры переднего вида или радара миллиметрового диапазона, датчик 7 обнаружения движущихся впереди транспортных средств может включать в себя инфракрасный датчик, датчик расстояния между транспортными средствами и/или т.п. Датчик 9 скорости транспортного средства определяет скорость транспортного средства на основе импульсного сигнала, указывающего число оборотов моста.
[0021] Процедура обработки отображения меток для следования
Далее описывается процедура обработки отображения меток для следования, выполняемая посредством устройства 1 отображения транспортного средства согласно настоящему варианту осуществления, со ссылкой на блок-схему последовательности операций способа на фиг. 2.
[0022] Как проиллюстрировано на фиг. 2, сначала на этапе S10, детектор 13 движущихся впереди транспортных средств получает информацию движущихся впереди транспортных средств из датчика 7 обнаружения движущихся впереди транспортных средств, чтобы получать изображение камеры переднего вида или результаты радарных измерений, включенные в информацию движущихся впереди транспортных средств.
[0023] На этапе S20, детектор 13 движущихся впереди транспортных средств анализирует изображение камеры переднего вида и определяет то, обнаруживает или нет детектор 13 движущихся впереди транспортных средств движущееся впереди транспортное средство, движущееся впереди рассматриваемого транспортного средства. Если детектор 13 движущихся впереди транспортных средств не может обнаруживать движущееся впереди транспортное средство, обработка возвращается к этапу S10. При возможности обнаруживать движущееся впереди транспортное средство, детектор 13 движущихся впереди транспортных средств определяет то, что обнаруженное движущееся впереди транспортное средство представляет собой целевое для следования за ним движущееся впереди транспортное средство, и обработка переходит к этапу S30.
[0024] На этапе S30, модуль 15 вычисления расстояния до движущихся впереди транспортных средств вычисляет расстояние между движущимся впереди транспортным средством, обнаруженным на этапе S20, и рассматриваемым транспортным средством. Модуль 15 вычисления расстояния до движущихся впереди транспортных средств может вычислять расстояние между целевым для следования за ним движущимся впереди транспортным средством и рассматриваемым транспортным средством на основе результатов радарных измерений или может вычислять расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством посредством анализа изображения камеры переднего вида.
[0025] На этапе S40, модуль 17 задания выделяемых индикаторов выполняет настройки относительно выделяемого индикатора таким образом, что он отображается поверх движущегося впереди транспортного средства в форме наложения. В настоящем варианте осуществления, чтобы выделять движущееся впереди транспортное средство, за которым едет рассматриваемое транспортное средство, метка для следования отображается в качестве выделяемого индикатора. С этой целью, модуль 17 задания выделяемых индикаторов задает позицию отображения и размер отображения метки для следования. Во-первых, модуль 17 задания выделяемых индикаторов задает прямоугольную рамку, окружающую движущееся впереди транспортное средство, на изображении камеры переднего вида и задает базисную точку в центре рамки. Затем модуль 17 задания выделяемых индикаторов задает позицию отображения метки для следования как позицию на предварительно определенном расстоянии ниже базисной точки. Следует отметить, что предварительно определенное расстояние задается на основе расстояния между движущимся впереди транспортным средством и рассматриваемым транспортным средством.
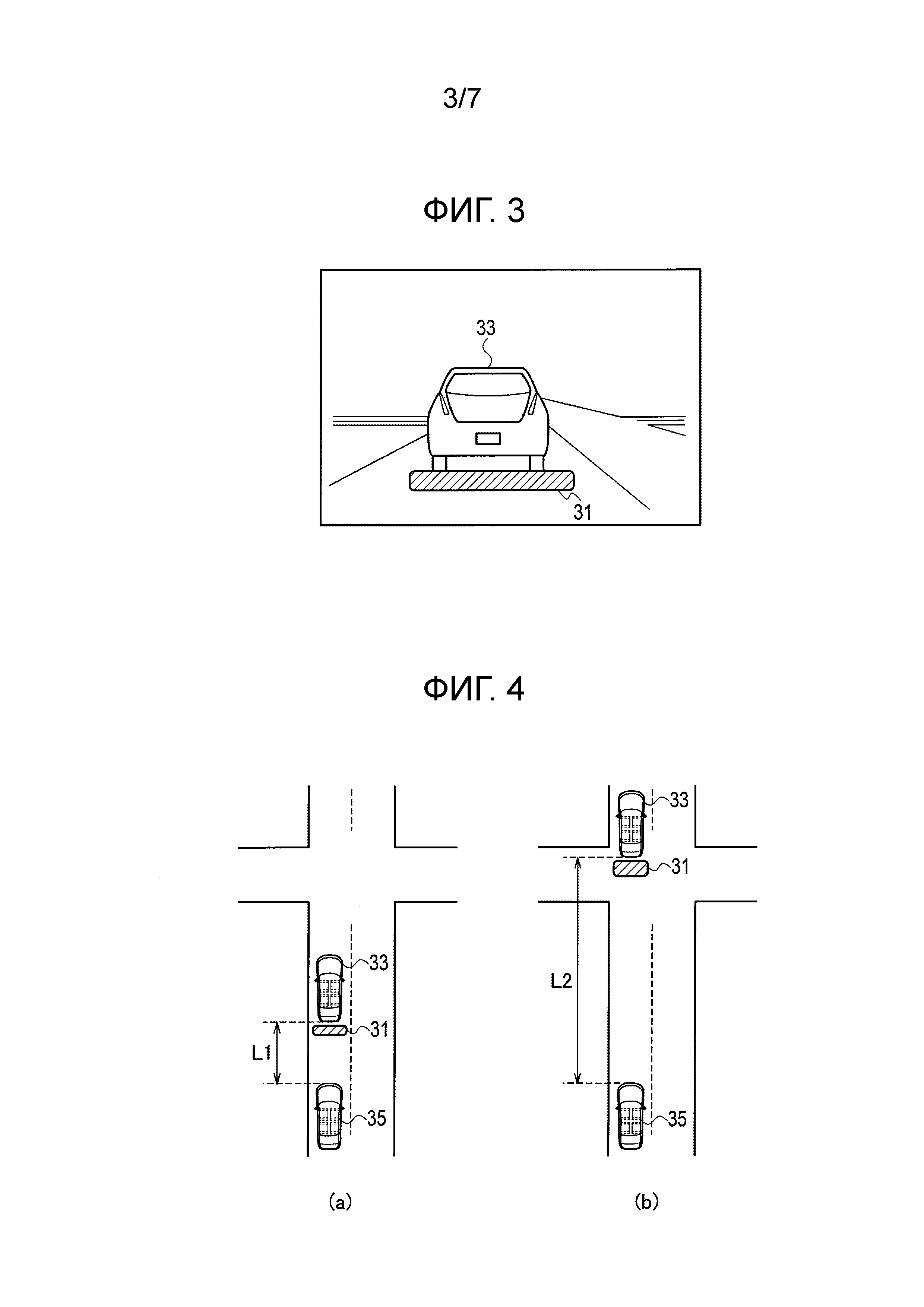
[0026] Затем, модуль 17 задания выделяемых индикаторов задает размер отображения метки для следования. Размер отображения метки для следования может задаваться на основе размера движущегося впереди транспортного средства на изображении или на основе расстояния между движущимся впереди транспортным средством и рассматриваемым транспортным средством. Например, метка 31 для следования задается немного более широкой, чем движущееся впереди транспортное средство 33, как проиллюстрировано на фиг. 3. После задания позиции отображения и размера отображения метки для следования, как описано выше, модуль 17 задания выделяемых индикаторов размещает, в трехмерном пространстве транспортного средства, метку для следования с заданным размером отображения в заданной позиции отображения. Затем, как проиллюстрировано на фиг. 3, кажется, что метка 31 для следования отображается рядом с движущимся впереди транспортным средством 33 в форме наложения. Хотя прямоугольная или стержневидная на фиг. 3, метка 31 для следования может иметь другие формы, к примеру, прямоугольной рамки, окружающей движущееся впереди транспортное средство, треугольника, звезды или стрелки. Яркость, пространственная частота и т.п. метки 31 для следования задаются заранее, и такие предварительно определенные значения используются для того, чтобы отображать метку 31 для следования. После того, как позиция отображения и размер отображения метки для следования задаются так, как описано выше, обработка переходит к этапу S50.
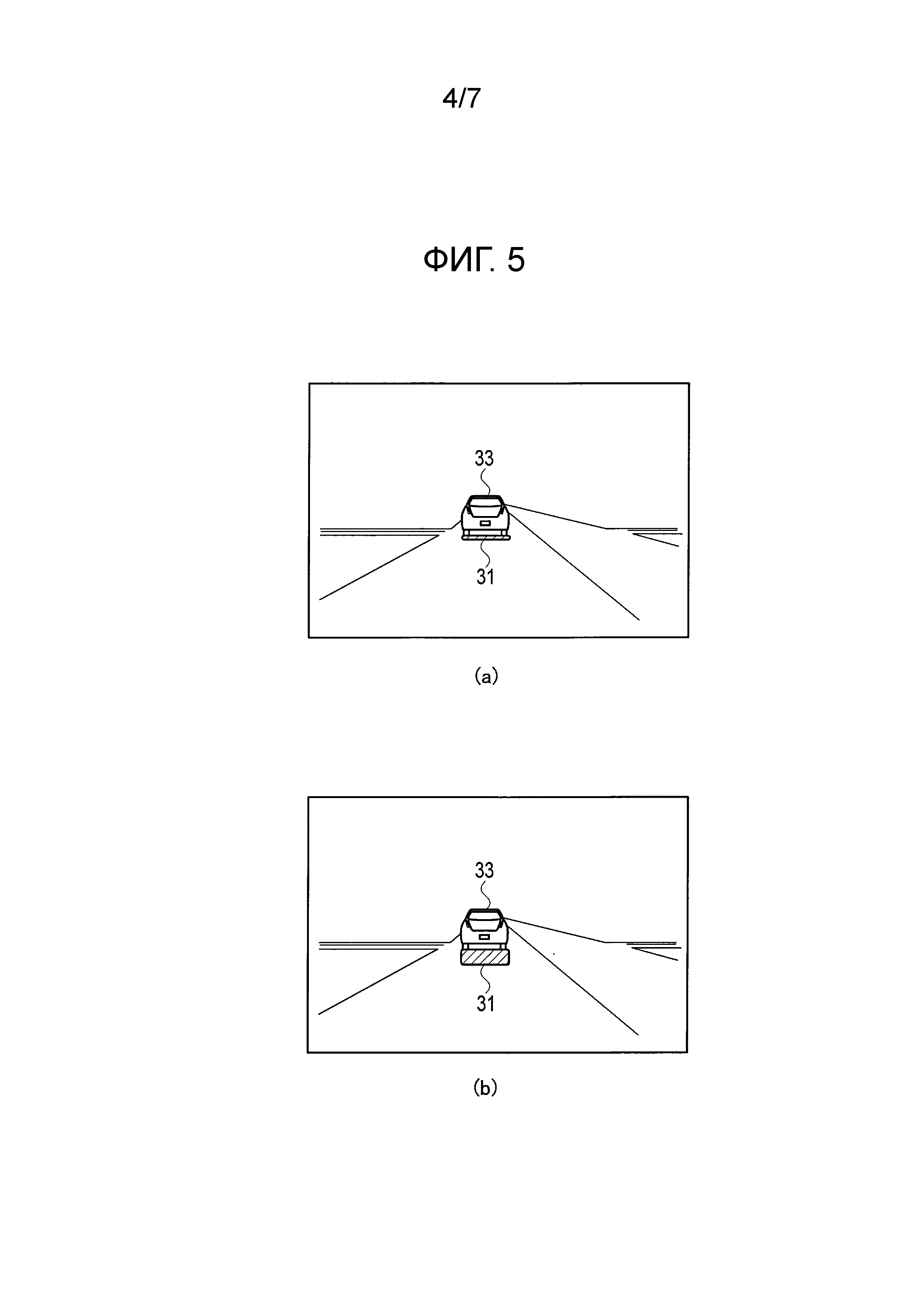
[0027] На этапе S50, модуль 17 задания выделяемых индикаторов делает уровень выделения выделяемого индикатора более высоким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством, вычисленное на этапе S30, является большим, чем тогда, когда расстояние является небольшим. В частности, модуль 17 задания выделяемых индикаторов изменяет размер выделяемого индикатора в качестве уровня выделения выделяемого индикатора. Например, когда движущееся впереди транспортное средство 33 находится в позиции на расстоянии L1 от рассматриваемого транспортного средства 35, как проиллюстрировано на фиг. 4(a), метка 31 для следования отображается с размером, легко распознаваемым водителем, как проиллюстрировано на фиг. 3. После этого, когда движущееся впереди транспортное средство 33 находится на большом расстоянии в позиции на расстоянии L2 от рассматриваемого транспортного средства 35, как проиллюстрировано на фиг 4(b), метка 31 для следования становится меньше, как проиллюстрировано на фиг. 5(a), так что ее становится затруднительным видеть водителю. Это обусловлено тем, что размер метки 31 для следования задается на основе размера движущегося впереди транспортного средства 33 на изображении либо расстояния между движущимся впереди транспортным средством 33 и рассматриваемым транспортным средством 35. Таким образом, в случае если расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством превышает предварительно определенное расстояние L1, модуль 17 задания выделяемых индикаторов повышает уровень выделения посредством обеспечения большего размера метки 31 для следования, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является большим, по сравнению с тем, когда расстояние является небольшим. Например, как проиллюстрировано на фиг. 5(b), размер метки 31 для следования изменяется таким образом, что он больше размера на фиг. 5(a). Таким образом, метка 31 для следования является легко распознаваемой для водителя, даже когда движущееся впереди транспортное средство 33 для следования за ним находится на большом расстоянии от рассматриваемого транспортного средства. Следует отметить, что предварительно определенное расстояние L1 может задаваться равным идеальному расстоянию между транспортными средствами, которое, в общем, считается необходимым, и размер метки для следования задается таким образом, что метка для следования является легко распознаваемой для водителя при этом расстоянии между транспортными средствами.
[0028] С другой стороны, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством составляет предварительно определенное расстояние L1 или меньше, метка для следования отображается со слишком большим размером и может мешать водителю. Таким образом, модуль 17 задания выделяемых индикаторов делает уровень выделения выделяемого индикатора более низким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является небольшим, чем тогда, когда расстояние является большим. Например, когда движущееся впереди транспортное средство 33 приближается к рассматриваемому транспортному средству, метка 31 для следования отображается со слишком большим размером, как проиллюстрировано на фиг. 6(a), и может мешать водителю. Таким образом, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является небольшим, модуль 17 задания выделяемых индикаторов понижает уровень выделения посредством обеспечения уменьшенного размера метки 31 для следования, как проиллюстрировано на фиг. 6(b), по сравнению с тем, когда расстояние является большим. Таким образом, метка 31 для следования не мешает водителю, даже когда движущееся впереди транспортное средство 33 для следования за ним приближается к рассматриваемому транспортному средству, и по-прежнему является легко распознаваемой для водителя.
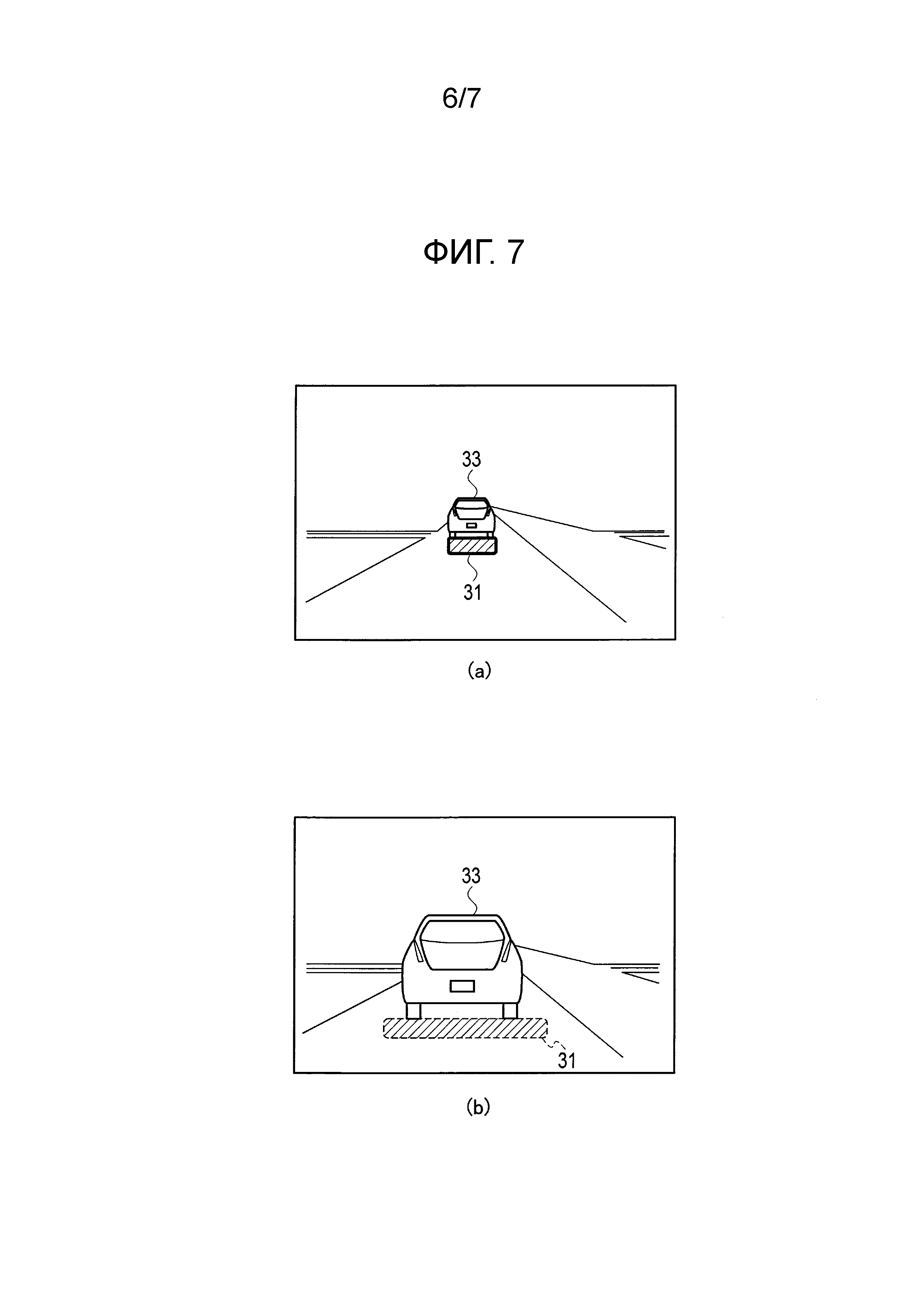
[0029] Дополнительно, модуль 17 задания выделяемых индикаторов может изменять пространственную частоту выделяемого индикатора в качестве уровня выделения выделяемого индикатора. В частности, в случае если расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством превышает предварительно определенное расстояние L1, модуль 17 задания выделяемых индикаторов повышает уровень выделения посредством обеспечения более высокой пространственной частоты метки 31 для следования, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является большим, по сравнению с тем, когда расстояние является небольшим. Например, как проиллюстрировано на фиг. 7(a), когда движущееся впереди транспортное средство 33 находится на большом расстоянии от рассматриваемого транспортного средства, метка 31 для следования увеличивается по пространственной частоте и отображается с рельефными краями. Таким образом, метка 31 для следования является легко распознаваемой для водителя, даже когда движущееся впереди транспортное средство 33 для следования за ним находится на большом расстоянии от рассматриваемого транспортного средства.
[0030] С другой стороны, в случае если расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством составляет предварительно определенное расстояние L1 или меньше, модуль 17 задания выделяемых индикаторов понижает уровень выделения посредством обеспечения более низкой пространственной частоты метки 31 для следования, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является небольшим, по сравнению с тем, когда расстояние является большим. Например, как проиллюстрировано на фиг. 7(b), когда движущееся впереди транспортное средство 33 приближается к рассматриваемому транспортному средству, метка 31 для следования уменьшается по пространственной частоте и отображается с размытыми краями. Таким образом, метка 31 для следования не мешает водителю, даже когда движущееся впереди транспортное средство 33 для следования за ним приближается к рассматриваемому транспортному средству, и по-прежнему является легко распознаваемой для водителя.
[0031] Дополнительно, модуль 17 задания выделяемых индикаторов может изменять яркость выделяемого индикатора в качестве уровня выделения выделяемого индикатора. В частности, в случае если расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством превышает предварительно определенное расстояние L1, модуль 17 задания выделяемых индикаторов повышает уровень выделения посредством обеспечения более высокой яркости метки 31 для следования, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является большим, по сравнению с тем, когда расстояние является небольшим. Например, как проиллюстрировано на фиг. 8(a), когда движущееся впереди транспортное средство 33 находится на большом расстоянии от рассматриваемого транспортного средства, метка 31 для следования увеличивается в яркости и отображается с ярким тоном. Таким образом, метка 31 для следования является легко распознаваемой для водителя, даже когда движущееся впереди транспортное средство 33 для следования за ним находится на большом расстоянии от рассматриваемого транспортного средства.
[0032] С другой стороны, в случае если расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством составляет предварительно определенное расстояние L1 или меньше, модуль 17 задания выделяемых индикаторов понижает уровень выделения посредством обеспечения более низкой яркости метки 31 для следования, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является небольшим, по сравнению с тем, когда расстояние является большим. Например, как проиллюстрировано на фиг. 8(b), когда движущееся впереди транспортное средство 33 приближается к рассматриваемому транспортному средству, метка 31 для следования уменьшается по яркости и отображается с темным тоном. Таким образом, метка 31 для следования не мешает водителю, даже когда движущееся впереди транспортное средство 33 для следования за ним приближается к рассматриваемому транспортному средству, и по-прежнему является легко распознаваемой для водителя. Следует отметить, что комбинация двух или более из вышеописанного размера, пространственной частоты и яркости выделяемого индикатора может использоваться в качестве уровня выделения выделяемого индикатора.
[0033] На этапе S60, формирователь 19 HUD-изображений формирует в трехмерном пространстве транспортного средства изображение выделяемого индикатора, заданное посредством последовательности обработки, описанной выше, и выводит изображение в HUD-модуль 5 отображения.
[0034] На этапе S70, HUD-модуль 5 отображения отображает изображение выделяемого индикатора, заданное в трехмерном пространстве транспортного средства, в области отображения, предоставленной таким образом, что она перекрывается с позицией лобового стекла. В силу этого, изображение метки для следования отображается поверх движущегося впереди транспортного средства в форме наложения, и водитель видит метку для следования за пределами лобового стекла. После того, как метка для следования отображается таким способом, обработка отображения меток для следования согласно настоящему варианту осуществления завершается.
[0035] Преимущества варианта осуществления
Как подробно описано выше, устройство 1 отображения транспортного средства согласно настоящему варианту осуществления задает выделяемый индикатор таким образом, что он отображается поверх движущегося впереди транспортного средства в форме наложения, и делает уровень выделения выделяемого индикатора более высоким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является большим, чем тогда, когда расстояние является небольшим. Это обеспечивает возможность водителю легко распознавать выделяемый индикатор, даже когда целевое для следования за ним движущееся впереди транспортное средство находится на большом расстоянии от рассматриваемого транспортного средства, и в силу этого позволяет достигать улучшения видимости выделяемого индикатора.
[0036] Дополнительно, в случае если расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством составляет предварительно определенное расстояние или меньше, устройство 1 отображения транспортного средства согласно настоящему варианту осуществления делает уровень выделения выделяемого индикатора более низким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является небольшим, чем тогда, когда расстояние является большим. Это позволяет не мешать водителю посредством выделяемого индикатора, даже когда целевое для следования за ним движущееся впереди транспортное средство приближается к рассматриваемому транспортному средству, и в силу этого позволяет достигать улучшения видимости выделяемого индикатора.
[0037] Кроме того, устройство 1 отображения транспортного средства согласно настоящему варианту осуществления увеличивает размер выделяемого индикатора в качестве уровня выделения выделяемого индикатора. Это обеспечивает возможность отображения выделяемого индикатора с большим размером, когда движущееся впереди транспортное средство находится на большом расстоянии, и в силу этого позволяет достигать улучшения видимости выделяемого индикатора.
[0038] Помимо этого, устройство 1 отображения транспортного средства согласно настоящему варианту осуществления увеличивает пространственную частоту выделяемого индикатора в качестве уровня выделения выделяемого индикатора. Это обеспечивает возможность увеличения пространственной частоты, когда движущееся впереди транспортное средство находится на большом расстоянии, и в силу этого позволяет достигать улучшения видимости выделяемого индикатора.
[0039] Помимо этого, устройство 1 отображения транспортного средства согласно настоящему варианту осуществления увеличивает яркость выделяемого индикатора в качестве уровня выделения выделяемого индикатора. Это обеспечивает возможность увеличения яркости, когда движущееся впереди транспортное средство находится на большом расстоянии, и в силу этого позволяет достигать улучшения видимости выделяемого индикатора.
[0040] Следует отметить, что вариант осуществления, описанный выше, является примером настоящего изобретения. Следовательно, настоящее изобретение не ограничено вышеописанным вариантом осуществления и, конечно, может реализовываться в режиме, отличающемся от вышеописанного варианта осуществления, посредством различного изменения вышеописанного варианта осуществления в зависимости от проектного решения и т.п. без отступления от технической идеи настоящего изобретения.
Список ссылочных обозначений
[0041] 1 - устройство отображения транспортного средства
3 - модуль управления
5 - HUD-модуль отображения (модуль отображения)
7 - датчик обнаружения движущихся впереди транспортных средств
9 - датчик скорости транспортного средства
11 - интерфейс ввода
13 - детектор движущихся впереди транспортных средств
15 - модуль вычисления расстояния до движущихся впереди транспортных средств
17 - модуль задания выделяемых индикаторов
19 - формирователь HUD-изображений.
Реферат
Группа изобретений относится к устройству и способу отображения транспортного средства. Работа осуществляется следующим образом. Определяется движущееся впереди транспортное средство, вычисляется расстояние между обнаруженным движущимся впереди транспортным средством и рассматриваемым транспортным средством и задается выделяемый индикатор, который должен отображаться поверх движущегося впереди транспортного средства в форме наложения. Уровень выделения выделяемого индикатора устанавливается более высоким, когда расстояние между движущимся впереди транспортным средством и рассматриваемым транспортным средством является большим, чем тогда, когда расстояние является небольшим. Отображается изображение выделяемого индикатора таким образом, что область отображения перекрывается с позицией лобового стекла транспортного средства. Обеспечивается распознавание индикатора впереди движущегося транспортного средства на больших расстояниях. 2 н. и 3 з.п. ф-лы, 13 ил.
Комментарии