Способ и система оповещения водителя грузового автомобиля - RU2724935C1
Код документа: RU2724935C1
Чертежи












Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе оповещения водителя грузового автомобиля.
УРОВЕНЬ ТЕХНИКИ
В настоящее время в механических транспортных средствах все чаще используют продвинутые системы содействия водителю (системы ADAS, Advanced Driver Assistance System). Указанные так называемые системы ADAS содержат датчики сканирования, сканирующие окружение транспортного средства, и компьютерную систему управления для принятия решений о вмешательстве в действия водителя или поддержке действий водителя. Система также содержит исполнительные механизмы, такие как механизмы торможения и рулевого управления, и предпочтительно средства связи для информирования водителя о состоянии системы и/или подачи предупреждающих сигналов в случае опасных условий движения транспорта, также называемые человеко-машинным интерфейсом. Указанные системы ADAS ориентированы на безопасность дорожного движения и предупреждают водителя в случае возникновения опасной ситуации, связанной с другими участниками дорожного движения или другим риском повреждения транспортного средства и/или окружающей среды. Способ оповещения водителей также может быть усовершенствован. Известный способ предоставления предупреждений ADAS заключается в отображении сигналов тревоги на приборной панели транспортного средства. Однако указанный подход имеет отрицательный побочный эффект, связанный с тем, что приборная панель требует постоянно обращать внимание, на внутреннюю часть транспортного средства, а не фактическую опасность вне транспортного средства.
Новое направление в области предупреждения о возможных столкновениях заключается в проецировании данных приборной панели на лобовое стекло транспортного средства. Указанный подход позволяет сохранить повышенное внимание на ситуации вне автомобиля. Также известен вариант, в котором при предупреждении о возможном столкновении на лобовое стекло проецируют световой сигнал торможения. В US 8049609 раскрыта система, проецирующая массив источников света, обеспеченных на поверхности приборной панели транспортного средства напротив лобового стекла и отображающих целевую информацию. Одна из проблем, в частности касающихся водителей грузовых автомобилей, заключается в том, что многие объекты в непосредственной близости от грузового автомобиля не видны водителю.
Существует значительная необходимость в дальнейшей разработке и оптимизации указанных систем. Одна из множества проблем заключается в разработке обратной связи системы ADAS, предупреждающей водителя, не отвлекая его или ее сигналами, в результате чего внимание водителя сосредоточено на реальных представляющих интерес ситуациях.
Существует необходимость в обеспечении надежного способа оповещения водителя на основе указанных сигналов ADAS в практичной конфигурации. Настоящее изобретение обеспечивает решение указанной задачи.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение направлено на обеспечение способа и системы оповещения водителя в кабине водителя механического транспортного средства. Система содержит множество источников света, размещенных в виде одного или более массивов для проецирования светового сигнала на лобовое стекло и/или боковое окно. Источники света обеспечены в кабине водителя вдоль горизонтального контура лобового стекла и боковых окон за пределами линии прямой видимости водителя. Так называемый световой массив может предпочтительно состоять из полосы светодиодов, выполненных с возможностью независимой активации, в нижеприведенном описании называемой "полосой светодиодов ADAS". Источники света выполнены с возможностью отображения зеркального изображения источника света на лобовом стекле или боковом окне, видимом водителю. Контроллер отслеживания выполнен с возможностью идентификации одного или более объектов, подлежащих отслеживанию по периметру механического транспортного средства. Система управления соединена с контроллером отслеживания для активации ряда источников света из множества источников света, выполненных с возможностью проецирования светового сигнала, указывающего на указанный отслеживаемый объект, по существу центрированного вдоль виртуальной линии видимости от водителя к идентифицированному объекту.
Для водителя грузового автомобиля указанная конфигурация имеет преимущество, заключающееся в том, что в восприятии водителя прямая видимость и виртуальная видимость в слепой зоне транспортного средства за пределами прямой видимости могут быть объединены путем проецирования световых сигналов видимых объектов и объектов в слепой зоне на лобовое стекло в зоне видимости при обзоре с точки зрения водителя, составляющей примерно 180 градусов по периметру лобового стекла и бокового окна. Таким образом, обеспечено оповещение не только о видимых объектах, но в особенности и об объектах, не видимых водителю. В данном отношении виртуальная линия видимости от водителя к идентифицированному объекту обеспечивает направление, в котором отслеживаемый объект расположен относительно водителя, а источники света, центрированные вдоль указанной линии видимости, активируют с обеспечением сигнала об отслеживаемом объекте. Водитель может получать предупреждения о потенциальной или непосредственной опасности. Для видимых и невидимых (находящихся в слепой зоне) объектов могут быть обеспечены различные сигналы, которые могут быть обеспечены путем использования различных цветов, размеров и/или выделения части светового массива или массивов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение дополнительно раскрыто на чертежах, на которых:
На ФИГ. 1А и 1В показана первая схематичная иллюстрация одного из примеров реализации изобретения;
На ФИГ. 2 показана схематичная карта видимости объектов, видимых водителю грузового автомобиля;
На ФИГ. 3 показано схематичное отображение проецирования светового сигнала, указывающего на отслеживаемый объект, вдоль виртуальной линии видимости;
На ФИГ. 4А и 4В более подробно показана визуализация объекта, проецируемого световыми сигналами.
На ФИГ. 5 показан схематичный вид сбоку кабины водителя, снабженной иллюстрируемой системой выдачи сигналов;
На ФИГ. 6А и 6В показан пример реализации массива источников света, выполненного вдоль лобового стекла;
На ФИГ. 7А и 7В показан другой схематичный вид кабины водителя, снабженной другой иллюстрируемой системой выдачи сигналов;
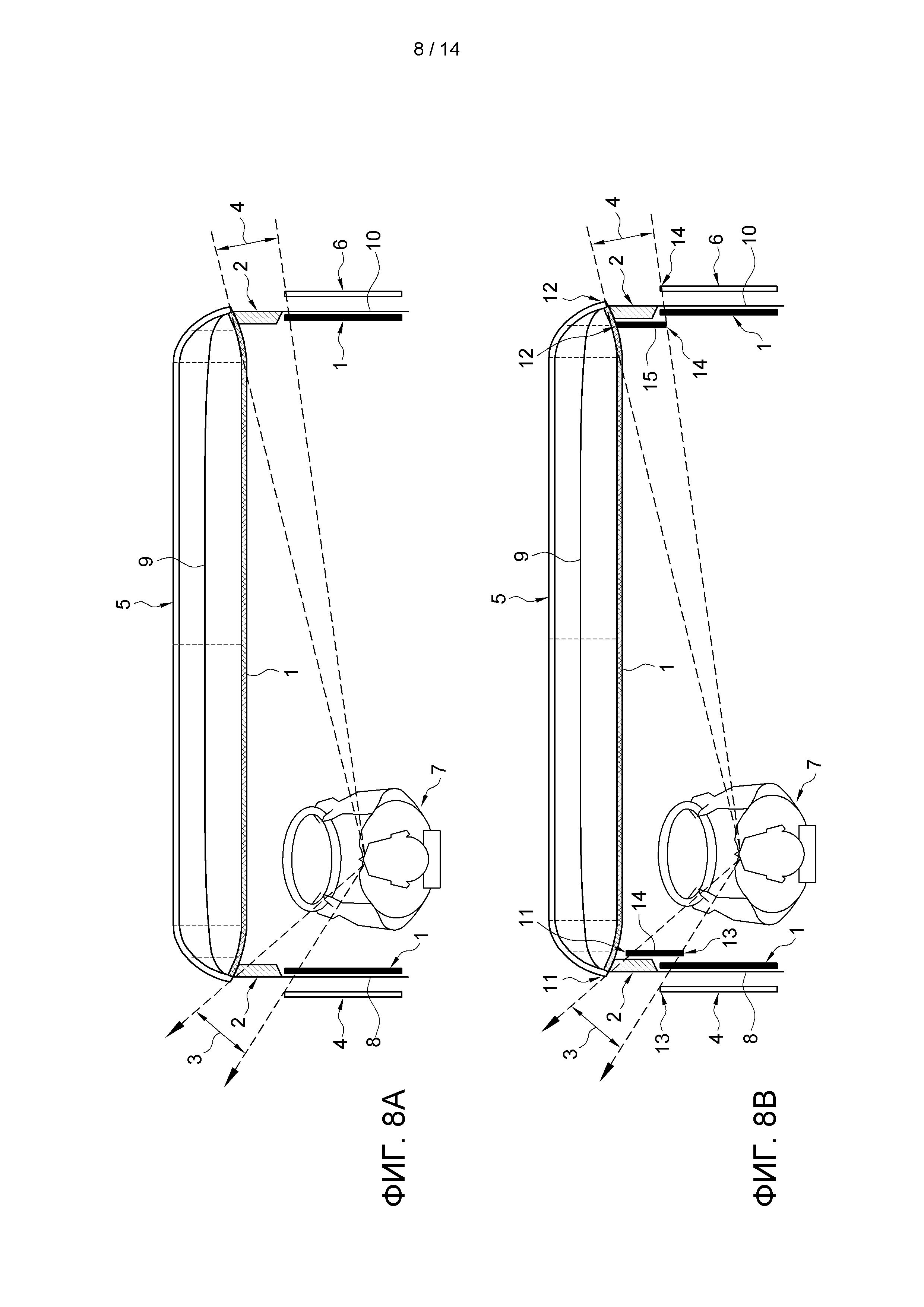
На ФИГ. 8А и 8В показан вид в поперечном сечении оптического расположения системы выдачи сигналов, причем на ФИГ. 8В приведена усовершенствованная конструкция полосы светодиодов ADAS вблизи передней стойки;
На ФИГ. 9А, В и С показаны примеры реализации системы в отношении боковых сторон транспортного средства;
На ФИГ. 10 показан еще один пример реализации системы, обеспечивающей множество проекций на боковом окне с различными глубинами;
На ФИГ. 11А и 11В показана примерная конфигурация контроллера отслеживания и сигнального контроллера;
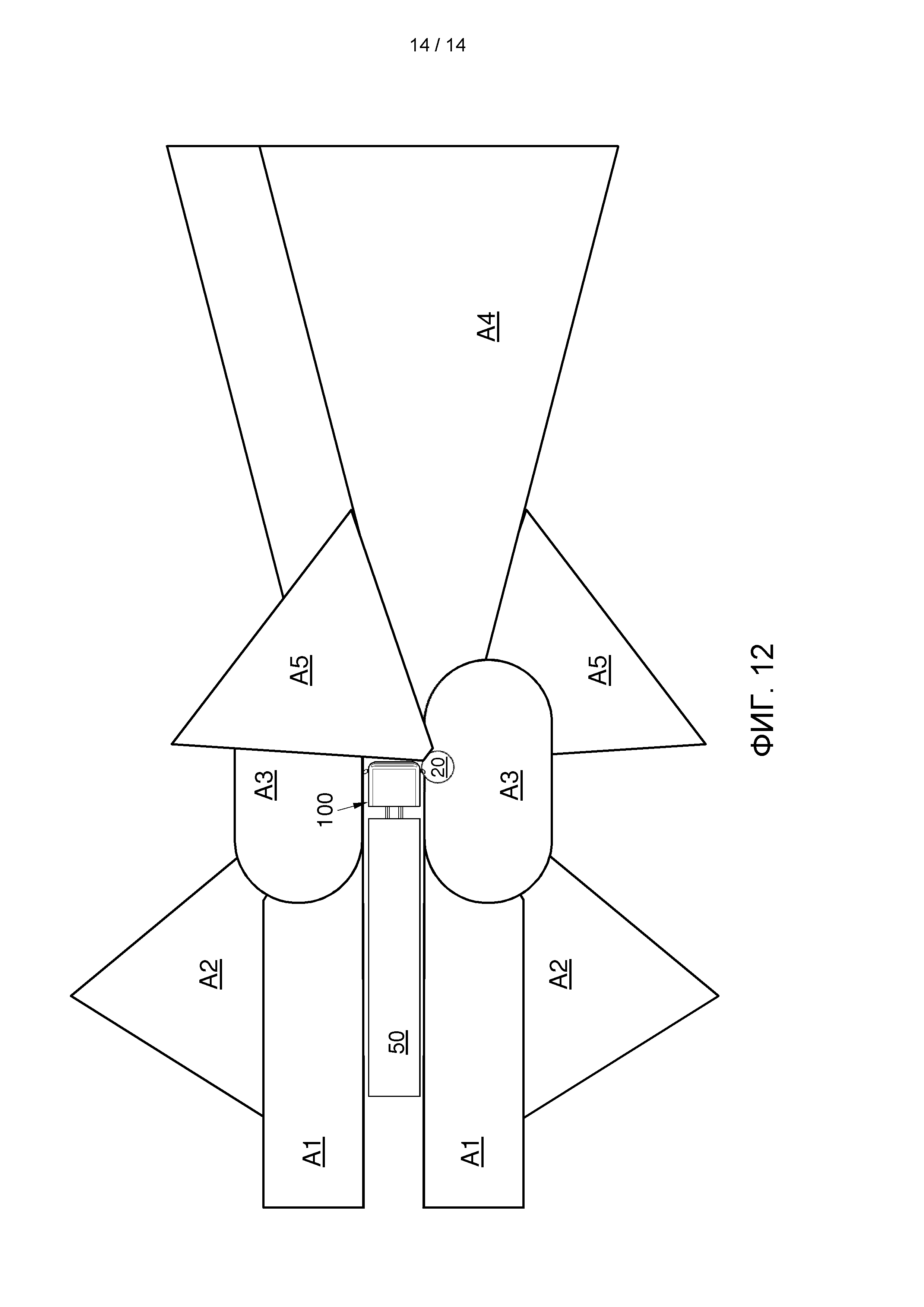
На ФИГ. 12 показана примерная конфигурация системы датчиков для контроллера отслеживания, состоящей из двух боковых блоков с множеством камер, сканирующих весь периметр транспортного средства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Если не указано иное, все термины (включая технические и научные термины), используемые в данном документе, имеют значение, широко принятое специалистами в области техники, к которой относится настоящее изобретение, рассматриваемое в контексте описания и чертежей. Также следует понимать, что термины, такие как термины, определенные в широко используемых словарях, следует интерпретировать как имеющие значение, соответствующее их значению в контексте соответствующей области техники, и не следует интерпретировать в идеализированном или чрезмерно формальном смысле, если в настоящем описании открытым текстом не указано иное. В некоторых случаях подробные описания широко известных устройств и способов могут быть опущены во избежание затруднения понимания настоящих систем и способов. Терминология, используемая для описания конкретных примеров реализации, не призвана ограничивать настоящее изобретение. Используемые в данном описании формы единственного числа включают также и формы множественного числа, если из контекста явно не следует иное. Термин "и/или" охватывает любые и все комбинации одного или более соответствующих перечисленных элементов. Также следует понимать, что термины "содержит" и/или "содержащий" указывают наличие приведенных признаков, но не исключают наличия или добавления одного или более других признаков. Все публикации, патентные заявки, патенты и другие ссылки, приведенные в настоящем описании, включены в настоящую заявку в качестве ссылки во всей их полноте. В случае противоречия, настоящее описание, включая определения, имеет преимущественную силу.
Термин "контроллер" использован в широко известном смысле для обозначения любого структурного аппаратного или программного обеспечения, выполненного с возможностью исполнения программной логики с целью обеспечения определенной базовой функции. Специалисту в данной области техники, как правило, известны принципы управления или реализации схемы в контексте описания, причем элементы процессора раскрыты в нижеприведенном описании. Например, "сигнальный контроллер" содержит аппаратные и/или программные элементы, согласно нижеприведенному описанию предназначенные для активации нескольких источников света для проецирования светового сигнала, указывающего на отслеживаемый объект и по существу центрированного вдоль виртуальной линии видимости от водителя к отслеживаемому объекту.
Кроме того, центральная система управления транспортным средством может быть снабжена программной логикой для управления трансмиссией двигателя и тормозной системой грузового автомобиля для ускорения или замедления движения грузового автомобиля, регулировки поведения транспортного средства в зависимости от изначальной реакции водителя на световой сигнал или даже в результате вмешательства системы ADAS в случае близости столкновения. В последнем случае может быть рассмотрена возможность вмешательства в рулевое управление транспортным средством для инициирования или стимулирования маневра уклонения от столкновения. Программная логика контроллера отслеживания может содержать схему управления обратной связью, основанную на входных данных от датчиков, измеряющих промежуточное расстояние и относительную скорость между грузовиком и обнаруженным объектом, таких как ультразвуковой датчик, радар, лидар, изображение с камеры или комбинации указанных датчиков.
Термин "программная логика" использован в широко известном смысле для обозначения рабочих команд, которые могут быть реализованы в аппаратных или программных структурах, управляющих схемой с обеспечением заданного функционального поведения.
Термин "сигнальная линия" использован в широко известном смысле для обозначения информации, обмениваемой посредством передачи сигнала, который может быть выполнен в виде кодированных сигналов, аналоговым или цифровым способом посредством любого известного устройства связи, без исключения возможности доступа к другим сигнальным линиям, а лишь для обозначения факта наличия доступа к некоторой системе связи. Указанный термин также может указывать на наличие опосредованной связи, т.е. сигнальная линия может быть обеспечена путем опосредованной передачи сигналов, например, беспроводной передачи сигналов и/или передачи сигналов посредством другого функционального устройства.
Процессор может представлять собой специализированный процессор для выполнения действий, обуславливаемых настоящей системой или может представлять собой процессор общего назначения, в котором лишь одна из множества функций предназначена для работы, обуславливаемой настоящей системой. Процессор может работать с использованием программной части, множества программных сегментов, или может представлять собой аппаратное устройство, использующее специализированную или многоцелевую интегральную схему. Может быть использован процессор любого типа, такой как специализированный или совместно используемый. Процессор может содержать микроконтроллеры, центральные процессорные устройства (CPU), графические процессорные устройства (GPU), процессоры цифровых сигналов (DSP), специализированные интегральные схемы (ASIC) или любые другие процессоры или контроллеры, такие как цифровые оптические устройства, или аналоговые электрические схемы, выполняющие идентичные функции и использующие электронные методы и архитектуру. Контроллер или процессор может также содержать память, которая может представлять собой часть контроллера или может находиться в рабочей связи с контроллером. Память может представлять собой память любого подходящего вида, в которой могут быть сохранены данные. В качестве памяти может быть использован любой известный или разработанный носитель, выполненный с возможностью хранения и/или передачи информации и подходящий для использования с настоящими системами и способами. В памяти также могут быть сохранены пользовательские настройки и/или данные приложения, доступные для контроллера с целью его конфигурирования для выполнения рабочих действий согласно настоящим системам и способам.
Несмотря на то, что в описании раскрыты примеры реализации систем и способов, специалистам в данной области техники также могут быть очевидны альтернативные способы, позволяющие использовать настоящее изобретение для достижения сходной функции и результата. Например, некоторые компоненты могут быть объединены или разделены на один или более альтернативных компонентов. Наконец, указанные примеры реализации приведены исключительно в целях иллюстрации настоящей системы и не призваны ограничивать сопутствующую формулу изобретения каким-либо конкретным примером реализации или группой примеров реализации. Таким образом, несмотря на то, что настоящая система подробно описана со ссылкой на конкретные примеры реализации системы, следует понимать, что специалисты в области техники могут разработать многочисленные модификации и альтернативные примеры реализации, не выходящие за рамки объема настоящих систем и способов, заданных в сопутствующей формуле изобретения. Соответственно, описание и чертежи следует считать приведенными в иллюстративных целях, и они не призваны ограничивать объем сопутствующей формулы изобретения.
На ФИГ. 1 показана базовая конфигурация системы выдачи сигналов. В системе схематично показана кабина 10 водителя механического транспортного средства. С точки зрения Р водителя источники света непосредственно не видны, но расположены в виде массива для проецирования светового сигнала 20 на лобовое стекло 30 и/или боковое окно 40. Согласно нижеприведенным иллюстрациям на следующих чертежах, источники света обеспечены в кабине водителя по существу вдоль горизонтального нижнего контура лобового стекла 30 и боковых окон 40 за пределами линии прямой видимости водителя. Согласно изображению светового сигнала 20, зеркальное изображение источника света показано на лобовом стекле 30. На ФИГ. 1А в качестве примера показано, что в слепой зоне перед грузовым автомобилем находится пешеход а. На ФИГ. 1В показано, что в слепой зоне со стороны от грузового автомобиля обнаружен велосипедист b. Пешеход а или велосипедист b отслеживается контроллером отслеживания, более подробно раскрытым в нижеприведенном описании и предназначенным для идентификации объектов, подлежащих отслеживанию по периметру грузового автомобиля, в частности, кабины 10 грузового автомобиля. Сигнальный контроллер соединен с контроллером отслеживания и активирует источники света для проецирования светового сигнала 20, указывающего на указанный отслеживаемый объект (а, b). Преимущество заключается в том, что световой сигнал 20 по существу центрирован вдоль виртуальной линии видимости от водителя к идентифицированному объекту для обращения внимания водителя на реальные объекты вместо панели предупреждения.
На ФИГ. 2 также приведена схематичная указательная карта видимости объектов, видимых водителю грузового автомобиля. На карте заданы различные зоны, задающие различные характеристики сигнализации сигнального контроллера. Например, сигнальный контроллер выполнен с возможностью реагирования на дополнительную информацию от контроллера отслеживания, например, на расстояние и относительную скорость отслеживаемого объекта. В зависимости от расстояния, например, в зонах, задающих близкое расстояние, среднее расстояние и дальнее расстояние, восприятие объекта отличается. Преимущество заключается в том, что сигнальный контроллер запрограммирован с возможностью подачи сигнала в соответствии с отслеживаемыми объектами, обнаруженными в различных зонах, на основании фактических слепых зон, обусловленных геометрией кабины. Например, в зоне (зона А) в непосредственной близости от транспортного средства (например, в пределах ближних 1-2 м) объекты значительной высоты (например, люди, велосипеды высотой до 1,5 м) не видны. В зоне, расположенной в отдалении (зона D) от транспортного средства на краю слепой зоны (например, на расстоянии свыше 12 м от транспортного средства), непосредственно видны также и объекты небольшой высоты. Очевидно, что расстояния могут варьироваться, например, в зависимости от геометрии и размера грузового автомобиля, а также от высоты положения водителя.
Вторая зона В покрывает наибольшую часть области слепой зоны, то есть зоны, в которой объекты небольшой высоты не видны. Объекты, обнаруженные в зоне В, могут быть отображены отличным от объектов в зоне А образом, т.е. сигнальный контроллер световых сигналов основан на фактическом расстоянии между точкой зрения водителя и центральной точкой объекта, в результате чего водитель получает представление о расстоянии или расстояниях между водителем и объектом или объектами: например, световые сигналы в виде большой активной зоны светодиодов указывают на то, что объект находится в непосредственной близости, а небольшая активная зона светодиодов указывает на то, что объект находится на большем расстоянии. Также см. ФИГ. 3.
В зоне С отслеживаемые объекты, расположенные в указанной зоне, находятся вне слепой зоны (и таким образом, являются видимыми). Вновь, например, в указанной зоне не может быть обеспечено визуальное отображение обнаруженного расстояния между объектом и водителем, в отличие от сигнализации в зоне В. Таким образом, в указанной зоне не обеспечено визуальное отображение расстояния до объекта относительно водителя, и сигнальный контроллер не помогает водителю в оценке расстояния до объекта. Кроме того, поскольку зона С находится на наибольшем удалении от водителя, указанное визуальное отображение в указанной по размеру меньше по сравнению с другими зонами. Преимущество заключается в том, что в указанной зоне обеспечены сигналы посредством минимального заметного числа источников света, применимого для объектов в указанной зоне, соответствующих критериям обнаружения. См. также ФИГ. 3, на которой приведены дополнительные примеры.
Объекты в зоне D находятся в задней области, проходящей сзади от линий прямой видимости глаз водителя, и могут быть отображены на внешних концах массива источников света, при рассмотрении с точки зрения водителя расположенных сбоку примерно под углом 90 градусов по периметру бокового окна. Поскольку объекты, обнаруженные в указанной зоне, не проецируют посредством световых сигналов, центрированных вдоль виртуальной линии видимости от водителя к идентифицированному объекту, для указанных объектов обеспечено еще одно сигнальное отображение, например, в виде меньшей активной области на внешнем конце массива источников света. Также обеспечен переход в сигнализации объектов, перемещающихся между различными зонами. Для обеспечения показательного перехода и обеспечения отличного визуального отображения, помогающего водителю при оценке расстояния между водителем и объектом, зона D может быть разделена на различные подзоны, например, до шести различных подзон, для обеспечения плавного перехода в случае перемещения объектов из зоны А, В или С в зону D. Соответственно, зона А покрывает область слепой зоны в непосредственной близости от кабины и может быть расширена посредством задней зоны D1.
Для зоны А грузового автомобиля, т.е. области слепой зоны для объектов, высота которых превышает 1,5 м, размеры зон могут быть следующими: А2: проходит в передней части грузовика на расстояние до 2 м; А4: область слепой зоны сбоку на стороне водителя, расстояние до 0,5 м; А5: область слепой зоны сбоку на противоположной от водителя стороне, расстояние до 4 м.
Для зоны В грузового автомобиля, т.е. области слепой зоны для объектов высотой менее 1,5 м, размеры зон могут быть следующими: А1: область слепой зоны, проходящая в передней части грузовика на расстояние до 7 м; A3: область слепой зоны сбоку на стороне водителя, расстояние до 3 м; и А6: область слепой зоны сбоку на противоположной от водителя стороне, расстояние до 14 м.
На ФИГ. 3 показано примерное отображение проекции светового сигнала (9, 10, 11), указывающего на отслеживаемый объект (5, 6, 7), по существу центрированный вдоль виртуальной линии видимости от водителя 8 к идентифицированному объекту (5, 6, 7). Преимущество заключается в том, что устройство обнаружения водителя в указанных целях определяет местоположение головы или глаз водителя относительно светового сигнала. Следует отметить, что проецируемый источник света отличается от физических источников света (2, 3, 4), которые, таким образом, могут не находиться на линии прямой видимости, что зависит от ориентации линии прямой видимости относительно плоскости окна. Таким образом, сигнальный контроллер может быть выполнен с возможностью содержания устройства обнаружения водителя, и сигнальный контроллер запрограммирован с возможностью корректировки виртуальной линии видимости в зависимости от обнаруженного положения водителя, получаемого от устройства обнаружения водителя. Отражение активной области светового сигнала 9, 10, 11 не выполнено излишне мелким, для обеспечения ее заметности и понятности для водителя; например, минимальная длина может составлять 5-10 см. В обладающем преимуществом примере реализации максимальный размер отражения световых сигналов, связанных с объектами в зоне А, В или С, по восприятию соответствует фактическому размеру объекта соответствующего вида, как будто указанный объект был бы расположен на границе зоны А и зоны В. Указанная конфигурация обеспечивает реалистичную визуализацию объекта сигнальным контроллером. В другом обладающем преимуществом примере реализации система выдачи сигналов запрограммирована с возможностью активации указанного светового сигнала, указывающего на видимость указанного отслеживаемого объекта водителю. Таким образом, объекты, обнаруженные в зоне А в непосредственной близости от периметра грузового автомобиля, могут быть сигнализированы отличным образом, например, посредством мигающего светового сигнала, от объектов, обнаруженных в зоне В.
На ФИГ. 4а более подробно показана визуализация объекта 6, проецируемого в виде проекции 10 сигнальной зоной 3 световых сигналов 1. Части 2, 3 и 4 по ФИГ. 4В полосы 1 светодиодов ADAS, активируемые для указания на наличие объектов, проецируемых в виде проекций 9, 10 и 11, соответственно, зависят от положения указанных объектов 5, 6 и 7 относительно точки 8 зрения водителя. Согласно ФИГ. 4b, центр виртуальных изображений 9, 10 и 11 активной области полосы светодиодов, отраженной в окне, выровнен с центром объектов 5, 6 и 7, при рассмотрении с точки (8) зрения водителя. Определение подлежащей активации части полосы 1 светодиодов ADAS основано на следующих аспектах по ФИГ. 4А:
Положение точек зрения глаз водителя и положение объекта: на основе указанных аспектов определяется угол 11 обзора водителя на окно 14.
На основании указанного угла 11 обзора, принципа "внутренний угол = внешний угол" для отражений и расстояния 12 между окном 14 и полосой 1 светодиодов ADAS определяют надлежащую активируемую (3) зону полосы светодиодов ADAS.
Все вышеуказанные аспекты приводят к образованию виртуального изображения 10 непосредственно на линии прямой видимости от водителя 8 к соответствующему объекту 6.
Указанное виртуальное изображение отражено на лобовом стекле 14 с проекционным расстоянием 13, в данном примере равным расстоянию 12 от активированной части полосы светодиодов ADAS до лобового стекла.
На ФИГ. 5 схематично показана конфигурация датчиков системы выдачи сигналов, раскрытой в вышеприведенном описании. Датчик 1, который может быть специально разработан для обозначенной зоны, например, для передней зоны A1, А2 грузового автомобиля (см. ФИГ. 2), сканирует окружение в поиске объектов, например, пешехода (6). В кабине 10 может быть обеспечен центральный блок управления, например, блок управления двигателем (ECU), или любая подходящая система 2 управления информацией, обеспеченная в грузовом автомобиле и непрерывно отслеживающая объекты, обнаруженные датчиком 1, по мере их перемещения относительно транспортного средства 100 и водителя D. Для указанной цели ECU 2 содержит контроллер отслеживания, передающий исходные данные от датчика и определяющий значимые объекты. Со ссылкой на ФИГ. 11А и 11В более подробно проиллюстрированы примеры подобной операции отслеживания, которая может быть выполнена способами, известными специалисту в области техники. На основании операции отслеживания сигнальный контроллер, обеспеченный в ECU 2, управляет частью массива источников света, который может быть выполнен на вытянутой опоре или в виде сигнальной полосы или полосы 3 ADAS. Сигнальная полоса 3 содержит множество источников света, расположенных в виде массива, обеспеченного в кабине 10 водителя вдоль горизонтального контура лобового стекла и боковых окон. Источник света может излучать световые сигналы нескольких цветов для предупреждения водителя или привлечения его внимания. Подача сигналов связана со значимым объектом, видимым с точки зрения 4 водителя над нижним краем 5 линии прямой видимости водителя за окном. Полоса 3 непосредственно не видна водителю, поскольку она расположена за пределами линии прямой видимости 5 над лобовым стеклом, задающим визуальный периметр. Активная сигнальная зона полосы 3 отражена в окне 4, показанном на вставке на ФИГ. 5а. На чертеже показано, что зеркальное изображение 4 активной зоны полосы ADAS обеспечено отражением 4, проецируемым на окно 40. С указанной целью источники света полосы ADAS расположены на некотором расстоянии 8 от лобового стекла, составляющем 10-40 см. Указанное оптическое расстояние может быть увеличено посредством промежуточных зеркал согласно иллюстрациям на нижеследующих чертежах. Предпочтительно, отражение 40 находится на свободном участке лобового стекла 40 над стеклоочистителями 7 лобового стекла, в результате чего обеспечены проекции в передней части транспортного средства 9, привлекающие внимание к ситуации вне транспортного средства, где обнаружен значимый объект 6.
На ФИГ. 6А и 6В показаны виды сверху кабины 10 водителя, например, кабины показанного на ФИГ. 5 вида. Полоса 1 светодиодов ADAS предпочтительно размещена на некотором расстоянии от переднего лобового стекла 2 для обеспечения достаточного расстояния проецирования виртуального изображения 3, воспринимаемого водителем. Конструкция кабины грузового автомобиля и лобового стекла подразумевает, что для обеспечения указанного расстояния полоса светодиодов должна быть размещена между вертикальными передними стойками 4, ограничивающими лобовое стекло 2. В результате сформировано виртуальное изображение, видимое водителю 5, которое не покрывает углы лобового стекла, в которых оно достигает передних стоек 6.
При придании полосе 1 светодиодов ADAS кривизны по ФИГ. 7А и 7В, которая начинается в точке 7 и заканчивается в точке 8, отражение в переднем лобовом стекле 2 приводит к формированию виртуального изображения 3, имеющего кривизну, начинающуюся в точке 9 и заканчивающуюся в точке 8. Вследствие наличия кривизны 10 переднего лобового стекла 2 вблизи от передних стоек 4, кривая отраженного виртуального изображения 3 меняет свой радиус и заканчивается непосредственно у передней стойки.
Соответственно, массив 1 источников света выполнен на удлиненной опоре, изогнутой в направлении лобового стекла 11 или бокового окна 10. Указанная кривизна 11 специально скорректирована на противоположных концевых сторонах переднего лобового стекла 2. Также в контексте указанной кривизны 11 опоры массив 1 источников света может быть скорректирован по кривизне лобового стекла 2, например, таким образом, что зеркальное изображение источника света проецируют по существу на постоянном расстоянии в направлении обзора водителя.
Для дополнительной регулировки визуального эффекта относительно водителя сигнальный контроллер может быть снабжен устройством обнаружения водителя. Таким образом, сигнальный контроллер может быть запрограммирован с возможностью корректировки виртуальной линии видимости в зависимости от обнаруженного фактического положения водителя, получаемого от устройства обнаружения водителя. Подобное устройство обнаружения может быть основано на механизмах отслеживания глаз и т.п.
Сигнальный массив, образованный полосой 1 светодиодов согласно ФИГ. 8А, прерывается в точках 11 и 12 вблизи передних стоек 2. Указанная конфигурация подразумевает, что объекты в зонах 3 и 4 непосредственно за передней стойкой не (полностью) отображены отражениями 5, 6 и 7 ни на одном из окон 8, 9 и 10. Для решения указанной проблемы конструкция полосы 1 светодиодов ADAS по ФИГ. 8В, продолжается за передними стойками 2 таким образом, что с точки зрения водителя 7 она начинается в конце отражения в переднем лобовом стекле 11 и 12 и заканчивается, в точке, в которой начинается отражение 13 и 14 в боковом окне или окнах, в результате чего объект, скрытый за передними стойками 3 и 4 может быть полностью покрыт полосой светодиодов ADAS. В частности, таким образом, отслеживаемый объект проецируют на боковые стойки кабины и по существу центрирован вдоль виртуальной линии видимости от водителя к идентифицированному объекту.
Промежуточные части 14 и 15 полосы светодиодов ADAS в направлении обзора передних стоек могут быть непосредственно видимыми или опосредованно видимыми посредством отражения на боковых стойках или передних стойках 2. Система по п. 12, в которой боковые стойки покрыты отражающим материалом таким образом, что зеркальное изображение источника света проецируют на виртуальном расстоянии за боковой стойкой. Например, для достижения указанной цели боковые стойки могут быть покрыты (сильно)отражающим материалом таким образом, что зеркальное изображение источника света проецируют на виртуальном расстоянии за боковой стойкой.
На ФИГ. 9а, b и с схематично показана система полос светодиодов ADAS, содержащая источник света (массив источников света), встроенный в боковые двери, который может излучать свет различных цветов для предупреждения водителя или привлечения его внимания. С этой целью датчик 1 (ФИГ. 9b) сканирует окружающую среду в поиске объектов, например, пешехода 6, и непрерывно отслеживает объекты по мере их перемещения относительно транспортного средства и водителя. Исходные данные от датчика 1 (ФИГ. 9b) поступают в ECU 2, преобразующий данные для определения значимых объектов, например, пешехода 6, и активирует часть полосы 3 ADAS (ФИГ. 9а), соответствующую значимому объекту.
Полоса ADAS не может быть непосредственно видна водителю 5, но активная зона панели ADAS отражена в окне 4. Источник света полосы ADAS находится на определенном расстоянии от окна, составляющем 5-20 см, что приводит к формированию проекции ситуации вне транспортного средства, привлекающей внимание к ситуации вне транспортного средства, где находится значимый объект 6. Для боковых окон в кабине полоса 1 светодиодов ADAS может быть расположена в двери 7 таким образом, что она не видна с сидения водителя. Таким образом, виртуальное изображение 4 проецируют на боковое окно 5 в положении, видимом с сидения водителя. Полоса светодиодов ADAS может быть расположена в боковой двери таким образом, что она не видна с сидения водителя - см. ФИГ. 9с.
Полоса 1 светодиодов ADAS должна быть расположена на некотором расстоянии 8 от бокового окна 5 для обеспечения достаточного расстояния 9 проецирования виртуального изображения 4, воспринимаемого водителем 6. Однако (см. ФИГ. 9с) расстояние между окном и полосой светодиодов ADAS ограничено шириной двери 7, например, указанное расстояние может составлять 4 см в наиболее узкой точке двери. Подобное расстояние 9 проецирования в наиболее узкой точке двери может быть недостаточным для привлечения внимания к ситуации вне транспортного средства, где находится объект. Для дальнейшего усовершенствования системы выдачи сигналов опора 2 изменена (см. ФИГ. 9а) таким образом, что на оптическом пути между источником 1 света и окном 10 обеспечены одно или более зеркал 4, 7, причем указанные зеркала 4, 7 увеличивают длину оптического пути от источника 1 света до окна 10. Например, может быть показано, что источник 1 света соответствует позициям 9 и 14 виртуального изображения, в частности, источник света отображают на определенном оптическом расстоянии 15 от лобового стекла 10. Полоса (1) светодиодов ADAS отражена в зеркале 4. Указанное зеркало также расположено в двери таким образом, что оно не является видимым непосредственно с сидения водителя 5. "Первое" виртуальное изображение 6 отражено в зеркале 4. Указанное виртуальное изображение 6 не видно с сидения водителя. Полоса 1 светодиодов ADAS отражена в первом зеркале 4, также расположенном в двери таким образом, что оно не является видимым непосредственно с сидения 3 водителя. Указанная конфигурация подразумевает, что "первое" виртуальное изображение 5 отражено в первом зеркале 4. Первое зеркало 4 и первое виртуальное изображение 5 не видны с сидения 6 водителя. Первое зеркало 4 и первое виртуальное изображение 5 отражены (8, 9) во втором зеркале 7. Указанное второе зеркало расположено в двери 2 таким образом, что оно не является видимым непосредственно с сидения 3 водителя.
Вследствие того, что водитель не может видеть второе зеркало 7, виртуальные изображения 8 и 9, сформированные вторым зеркалом 7, не видны с сидения водителя. Второе зеркало 7 и его внутренние виртуальные изображения 8 и 9 первого зеркала 4 и первое виртуальное изображение 5 проецируют на боковое окно 10. В результате возникает виртуальное изображение 11 второго зеркала 7, которое видно с сидения 12 водителя. На виртуальном изображении 11 второго зеркала 7 внутренние виртуальные изображения 8 и 9 также проецируют на боковое окно 10, что приводит к возникновению второго виртуального изображения 13 первого зеркала 4 и третьего виртуального изображения 14 полосы 1 светодиодов ADAS. Третье виртуальное изображение 14 полосы 1 светодиодов ADAS видно с сидения 12 водителя.
Расстояние 16 проецирования первого виртуального изображения 5 в первом зеркале 4 равно расстоянию 17 между полосой 1 светодиодов ADAS и первым зеркалом 4. Расстояние 18 проецирования виртуального изображения 8 первого зеркала 4 равно расстоянию 19 между первым зеркалом 4 и вторым зеркалом 7. Расстояние проецирования второго виртуального изображения 9 полосы 1 светодиодов ADAS представляет собой сумму расстояния 16 проецирования первого виртуального изображения 5 и расстояния 18 проецирования виртуального изображения 8 первого зеркала 4 во втором зеркале 7. Принципы, сходные с вышеописанными, также применяют к виртуальным изображениям 11, 13 и 14, проецируемым на боковом окне 10. В результате образовано расстояние 15 проецирования третьего виртуального изображения 14, которое является суммой расстояния 17 между полосой 1 светодиодов ADAS и первым зеркалом 4, расстояния 19 между первым зеркалом 4 и вторым зеркалом 7 и расстояния 20 между вторым зеркалом 7 и боковым окном 10.
На ФИГ. 10 показан еще один пример увеличенного расстояния проецирования, обеспеченного путем размещения дополнительных зеркал и источников света в опоре 6. В частности, на оптическом пути между источником 1 света и лобовым стеклом 10 обеспечен один или более дополнительных источников 2 света, причем система управления запрограммирована с возможностью избирательной активации одного или более из указанных источников 1 или 2 света вдоль указанного оптического пути в виде функции расстояния до отслеживаемого объекта.
Посредством указанного решения расстояние проецирования виртуального изображения может быть дополнительно изменено.
На ФИГ. 11А дополнительно проиллюстрирована система 800 ECU. Система ECU состоит из контроллера 810 отслеживания, запрограммированного с возможностью вычисления вероятности столкновения с объектом, которая может быть выражена как время до столкновения (ТТС), на основании перемещения отслеживаемого объекта. Сигнальный контроллер 820 активируют для отображения светового сигнала на основании вычисленной вероятности. Датчик получает исходные данные 1 и выполняет действие 2 группировки для визуализации группированных данных 3, которые идентифицируют значимые объекты и характеристики. Может быть рассчитан уровень тревоги, например, на основании того, является ли объект пешеходом, велосипедом или автомобилем. Указанный контроллер 810 обладает арифметическими средствами для вычисления конкретной активации источника света на основании выходных данных контроллера отслеживания в зависимости от возможных дополнительных данных информации отслеживания, связанных с отслеживаемым объектом. Указанные данные информации отслеживания могут соответствовать природе объекта (человек или не человек), размеру, относительной скорости и вероятности столкновения с отслеживаемым объектом. Например, сигнальный контроллер запрограммирован с возможностью активации ряда источников света вдоль контура в виде функции расстояния до указанного отслеживаемого объекта. Объекты различных видов также имеют различные размеры, например, пешеход значительно меньше по сравнению с легковым автомобилем. Указанное различие в размерах объектов передают водителю посредством обеспечения различных размеров отражения активной зоны полосы светодиодов. Блок предупреждений определяет аспекты поведения системы выдачи сигналов на основании обнаруженного уровня тревоги с помощью контроллера. Указанные аспекты поведения представляют собой, например, цвет светодиода, интенсивность света, частоту мигания или движения, и уровень 4 тревоги передают на сигнальный контроллер 820, определяющий поведение 6 светового сигнала (например, цвет, интенсивность света, частоту мигания). Местоположение 5 объекта передают в блок отображения объекта; указанная подфункция отвечает за определение светодиодов, которые должны быть активированы, на основании информации об обнаруженном объекте (например, местоположения и вида объекта). Таким образом, блок отображения определяет активацию нескольких источников света (местоположение и расстояние) из множества источников света. Датчик 9 яркости может определять уровень фона для регулировки уровня яркости источников света в соответствии с условиями освещения окружения. Таким образом, источники света выполнены с возможностью проецирования светового сигнала, указывающего на отслеживаемый объект. Кроме того, положение обзора водителя используют для вычисления надлежащей активации светодиодов полосы ADAS, в результате чего полоса по существу центрирована вдоль виртуальной линии видимости от водителя к идентифицированному объекту.
Диспетчер управления светодиодами: на основе информации, получаемой указанной подфункцией от других подфункций, диспетчер выдает запрос индикации, описывающий все требуемые свойства и поведение светодиодов, которые должны быть сообщены водителю.
Например, уровень тревоги может быть сообщен путем увеличения интенсивности света от источников света для указания на повышение риска критического столкновения. В другом примере необходимость привлечения внимания посредством светодиодов отсутствует вследствие того, что указанный уровень тревоги может быть совмещен со звуковым предупреждением, обеспечиваемым диспетчером звука. В другом примере дополнительно повышенный уровень предупреждения может быть сообщен путем увеличения интенсивности света с мигающим символом. Для выполнения функции контроллера 820 выделение всех объектов не является целью, и могут быть реализованы дополнительные правила и подходы для определения объектов, достаточно важных для подачи сигнала. Кроме того, сигнальный контроллер может быть запрограммирован с возможностью активации некоторого количества источников света вдоль контура в последовательном порядке по направлению к указанной виртуальной линии видимости для привлечения внимания водителя к соответствующему направлению обзора.
На ФИГ. 11В показана примерная диаграмма, на которой определен список объектов на основе группировки исходных данных лазерного сканера, полученных от двухмерного или трехмерного лазерного сканера. В другом варианте указанные исходные данные могут также поступать с радара или ультразвукового датчика, или могут быть получены на основе пикселей, взятых с изображений камеры, сгруппированных для идентификации объектов. Измерения от лазерного сканера отображают в виде набора точек в плоскостях х, y. Для получения списка объектов из исходных данных, полученных в виде набора дискретных точек, осуществляют действие группировки. В ходе действия группировки точкам данных присваивают метку, указывающую на тот факт, что указанные точки относятся к одному объекту. Например, алгоритм определяет принадлежность точек к одной группе путем проверки евклидова расстояния до всех других точек данных. Ее параметры указанного действия представляют собой минимальное количество точек, которые должны быть расположены вблизи друг от друга, и пороговое значение расстояния, которое определяет расстояние, считаемое достаточно близким.
Для отображения каждого из объектов на полосе светодиодов необходимо знать местоположение его центра, а также ширину, воспринимаемые водителем, с известным расположением относительно лазерного сканера. Центральное расположение каждой из групп определяют путем подбора охватывающего эллипсоида с минимальным объемом вокруг набора точек (приблизительно до достижения определенного значения допуска).
Эллипс (е, f, g) с произвольной ориентацией может представлять собой облако точек с произвольным отношением длины к ширине, заданного с повышенной точностью, что приводит к довольно точному приблизительному определению расположения центра и ширины объекта (со стороны, видимой водителю). По сравнению с прямоугольной ограничительной рамкой эллипс является более естественной формой при использовании для расчета ширины, поскольку он менее чувствителен к перспективе, используемой для обзора объекта.
Ширину, воспринимаемую водителем, определяют путем вычисления наиболее крайних точек на эллипсе е, f, g, видимых с местоположения водителя. Указанный принцип может быть проиллюстрирован посредством соответствующего конуса обзора при рассмотрении с местоположения водителя (в данном случае - (-1, -0,8)) к наиболее крайним точкам эллипса, видимым с указанной точки. Центры каждой из групп обозначены точкой. На основании местоположения объекта, размера и других критериев определяют объекты, подлежащие визуализации для водителя. Возможный подход к определению способа выделения объектов заключается в вычислении пересечения конуса обзора различных объектов с плоскостью, в которой необходимо визуализировать отражение. Указанный принцип реализован на нижеприведенном чертеже для двух крайних правых объектов: при использовании указанного подхода ширина выделенной части на отражении прямо пропорциональна воспринимаемой ширине объекта.
ДРУГИЕ ПРИМЕРЫ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
В одном из примеров реализации данные изображения могут быть получены с камер или в виде данных сканирования с двухмерных или трехмерных сканеров, причем указанные данные образованы наборами углов отражения и соответствующими расстояниями отражения. Данные сканирования, представляющие собой набор отражений лазера (двухмерный или трехмерный угол и расстояние отражения, полученные, например, лазерами или радарами), могут быть проанализированы для идентификации подлежащего отслеживанию объекта. Кроме того, при необходимости отслеживаемый объект может быть рассчитан или проверен, например, путем калмановской фильтрации, на основании данных других датчиков, например, в зонах, недоступных для сканера. Например, эталонное положение также может быть измерено обычными средствами, например, бортовыми датчиками парковки. Указанные дополнительные датчики также могут быть использованы для оптимизации взаимодействия с водителем; например, путем сглаживания ускорения или рулевого управления в соответствии с заданными ограничениями.
На ФИГ. 12 показан еще один пример реализации, в котором система выдачи сигналов снабжена множеством камер 20, сканирующих периметр транспортного средства. Указанные камеры обычно сгруппированы в боковые блоки в точке, в которой обычно расположены боковые зеркала. Указанный блок боковых камер может содержать первую камеру, получающую изображение боковой зоны А1, проходящей кзади и вдоль транспортного средства; вторую камеру, получающую изображение боковой зоны А2, проходящей в сторону от транспортного средства; третью камеру, получающую изображение близкой боковой зоны A3 транспортного средства, обычно представляющую собой камеру отслеживания слепой зоны в виде так называемой линзы камеры "рыбий глаз", для обнаружения уязвимых участников дорожного движения, таких как пешеходы и велосипедисты, в непосредственной близости от грузового автомобиля; четвертую камеру, направленную кпереди и сканирующую в продольном направлении (параллельно и со значительным смещением относительно оси транспортного средства) переднюю зону А4 транспортного средства, и пятую камеру, получающую изображение близкой передней зоны А5 транспортного средства по существу в боковом наклонном направлении, направленном к противоположной стороне транспортного средства, на которой расположен другой блок камер.
Вследствие наличия указанных камер для соответствующих областей A1, А2, A3, А4 и А5 изображения, отслеживание объектов может быть дополнительно усовершенствовано путем анализа изображений указанных камер, возможно в комбинации с сигналами, поступающими от радара, лидаров и/или ультразвуковых датчиков. Вследствие того, что транспортное средство оборудовано подобными системами камер с обеих сторон транспортного средства, обеспечен полный круговой обзор окружающего пространства, охватывающий среду в непосредственной близости от транспортного средства. Применение системы выдачи сигналов не ограничено оповещением о путниках и мотоциклистах, не видимых посредством прямого визуального обзора. Напротив, система выдачи сигналов может быть применена для оповещения о широком ряде объектов и значимых событий, обнаруженных в непосредственной близости от грузового автомобиля. Указанные объекты без ограничения могут представлять собой, барьеры, столбы, (неподвижные) транспортные средства и т.д., в частности, с обеспечением работы в качестве системы предупреждения столкновения для предотвращения столкновения транспортного средства при маневрировании.
Реферат
Изобретение относится к системе оповещения водителя грузового автомобиля. Система выдачи сигналов для оповещения водителя грузового автомобиля в кабине грузового транспортного средства, имеющей изогнутое лобовое стекло и боковые окна. Система содержит множество источников света, расположенных в виде массива для проецирования светового сигнала на лобовое стекло и/или боковое окно. Массив источников света обеспечен на удлиненной опоре, изогнутой в направлении лобового стекла или бокового окна вдоль горизонтального контура лобового стекла и боковых окон за пределами линии прямой видимости водителя, и выполнен с возможностью отображения зеркального изображения источника света на лобовом стекле или боковом окне. Система также содержит контроллер отслеживания, соединенный по меньшей мере с одним датчиком объектов и выполненный с возможностью обнаружения и идентификации одного или более объектов, сигнальный контроллер, соединенный с контроллером отслеживания для активации ряда источников света из множества источников света, выполненных с возможностью проецирования светового сигнала, указывающего на указанный отслеживаемый объект. Достигается повышение безопасности водителя грузового автомобиля. 11 з.п. ф-лы, 21 ил.
Комментарии