Эндоскоп и способ его использования - RU2686393C2
Код документа: RU2686393C2
Чертежи


Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к области контроля механических деталей и, в частности, контроля труднодоступных механических деталей.
Уровень техники
Специалисту в данной области известно использование эндоскопов для визуального контроля труднодоступных механических деталей. Эндоскоп, используемый в механике, строительстве, а также в медицине, как правило, содержит эндоскопическую головку, устройство отображения изображений, снимаемых через указанную эндоскопическую головку, и удлиненный элемент, соединенный с эндоскопической головкой. Таким образом, эндоскопическую головку можно ввести через узкое отверстие и направлять при помощи удлиненного элемента к объекту осмотра для осуществления визуального наблюдения через эндоскопическую головку и устройство отображения. Среди этих эндоскопов известны жесткие эндоскопы, а также гибкие эндоскопы, позволяющие обходить препятствия на пути прохождения эндоскопической головки. Кроме того, известны также оптические эндоскопы, в которых эндоскопическая головка соединена с устройством отображения через по меньшей мере одно оптическое волокно, напрямую передающее свет, улавливаемый эндоскопической головкой, и видеоэндоскопы, в; которых эндоскопическая головка содержит видеокамеру, соединенную через проводную или беспроводную связь с устройством отображения. Кроме того, такой эндоскоп обычно оснащен осветительным устройством, установленным либо непосредственно на эндоскопической головке, либо соединенным с ней через по меньшей мере одно оптическое волокно, что позволяет освещать объекты осмотра для их визуального наблюдения.
Однако в некоторых случаях простого визуального наблюдения оказывается недостаточно для определения состояния целостности механической детали. Так, некоторые дефекты, скрытые для простого наблюдения, можно выявить при помощи частотного контроля, называемого также "ping test". При таком частотном контроле на объект осмотра воздействуют по меньшей мере одним импульсом, чтобы спровоцировать вибрацию, и анализ частот этой механической вибрационной реакции позволяет выявлять возможные дефекты в объекте осмотра или просто характеризовать этот объект осмотра. В наиболее простой версии контролер слегка ударяет по объекту осмотра и прослушивает издаваемый им в ответ звук.
Однако в известных технических решениях, чтобы осуществить такой частотный контроль на труднодоступной детали, часто приходиться ее демонтировать, что может быть затратным с точки зрения времени и рабочей силы. Кроме того, осуществление частотного контроля на снятой детали может отрицательно сказаться на его репрезентативности.
Раскрытие изобретения
Задачей настоящего изобретения является устранение этих недостатков. В частности, настоящая заявка призвана предложить эндоскоп, который позволяет осуществлять не только визуальный контроль, но также частотный контроль труднодоступной детали.
В по меньшей мере одном варианте выполнения указанная задача решена за счет; того, что эндоскопическая головка эндоскопа содержит устройство частотного контроля, содержащее по меньшей мере один датчик вибраций, контактный элемент для механического возбуждения объекта частотного контроля и привод для подачи импульса на объект частотного контроля через указанный контактный элемент.
Благодаря этим признакам, эту эндоскопическую головку можно визуально направлять к труднодоступному объекту частотного контроля, чтобы эта деталь оказалась в поле действия датчика вибраций и контактного элемента для осуществления частотного контроля этого объекта.
В частности, устройство частотного контроля может содержать по меньшей мере одну электромеханическую микросистему, включающую в себя датчик вибраций и/или по меньшей мере привод контактного элемента для механического возбуждения объекта частотного контроля, что позволяет ограничить габарит эндоскопической головки с целью обеспечения для нее доступа к особенно недоступным местам.
Для исключительно точного улавливания вибрационного ответа объекта контроля датчик вибраций может быть, в частности, микрофоном.
Для обеспечения обхода препятствий на пути эндоскопической головки эндоскоп может быть гибким эндоскопом, то есть эндоскопом, указанный удлиненный элемент которого может изгибаться, например, по меньшей мере под углом 30°. Однако в альтернативном варианте эндоскоп может быть жестким эндоскопом, то есть эндоскопом, удлиненный элемент которого не может так изгибаться.
Эндоскоп может быть оптическим эндоскопом, то есть эндоскопом, в котором эндоскопическая головка соединена с устройством отображения изображений при помощи по меньшей мере одного оптического волокна. Однако в альтернативном варианте эндоскоп может быть видеоэндоскопом, то есть эндоскопом, в котором эндоскопическая головка содержит видеокамеру, соединенную с устройством отображения изображений.
Разумеется, эндоскоп может дополнительно содержать осветительное устройство. В частности, это осветительное устройство может быть установлено непосредственно на эндоскопической головке или может быть соединено с ней через по меньшей мере одно оптическое волокно.
Кроме того, привод может быть расположен отдельно от датчика вибраций, но может быть также с ним объединен, в частности, если привод является пьезоэлектрическим, магнитным или электромеханическим приводом. С другой стороны, для подачи импульса на перкуссионный молоточек можно предусмотреть другие типы приводов, в частности пневматические приводы и упругие пружины. Привод может быть выполнен с возможностью подачи единственного импульса на объект контроля через контактный элемент, чтобы спровоцировать вибрационный ответ объекта при помощи простого удара, или с возможностью генерирования вибрации контактного элемента, что позволяет осуществить анализ ответа объекта частотного контроля на по меньшей мере одной заранее определенной частоте возбуждения.
Альтернативно включению контактного элемента и привода в ту же эндоскопическую головку, что и для датчика вибраций, настоящее изобретение относится также к набору, содержащему первый эндоскоп с эндоскопической головкой, содержащей устройство частотного контроля с датчиком вибраций, устройство отображения изображений, снимаемых через эту эндоскопическую головку, и удлиненный элемент, соединенный с этой эндоскопической головкой, а также второй эндоскоп, содержащий эндоскопическую головку с по меньшей мере одним контактным элементом для механического возбуждения объекта частотного контроля, привод для подачи импульса на объект частотного контроля через контактный элемент, устройство отображения изображений, снимаемых через эндоскопическую головку второго эндоскопа, и удлиненный элемент, соединенный с эндоскопической головкой указанного второго эндоскопа. В случае необходимости, можно использовать одно и то же устройство для отображения изображений первого и второго эндоскопов, чтобы объединить ресурсы, при этом как первый, так и второй эндоскопы могут быть гибкими или жесткими оптическими или видеоэндоскопами.
Объектом изобретения является также способ использования этого эндоскопа для частотного контроля объекта осмотра. В по меньшей мере одном варианте осуществления этот способ может включать в себя направленное подведение эндоскопической головки к объекту осмотра, возбуждение объекта осмотра путем подачи импульса на объект осмотра через контактный элемент при помощи привода, чтобы спровоцировать вибрационный ответ, и прием указанного вибрационного ответа при помощи датчика вибраций. Затем принятый датчиком вибраций вибрационный ответ можно подвергнуть частотному анализу для определения состояния целостности объекта осмотра.
Краткое описание чертежей
Изобретение и его преимущества будут более очевидны из нижеследующего подробного описания нескольких примеров выполнения, представленных в качестве не ограничительных примеров. Описание приведено со ссылками на прилагаемые чертежи.
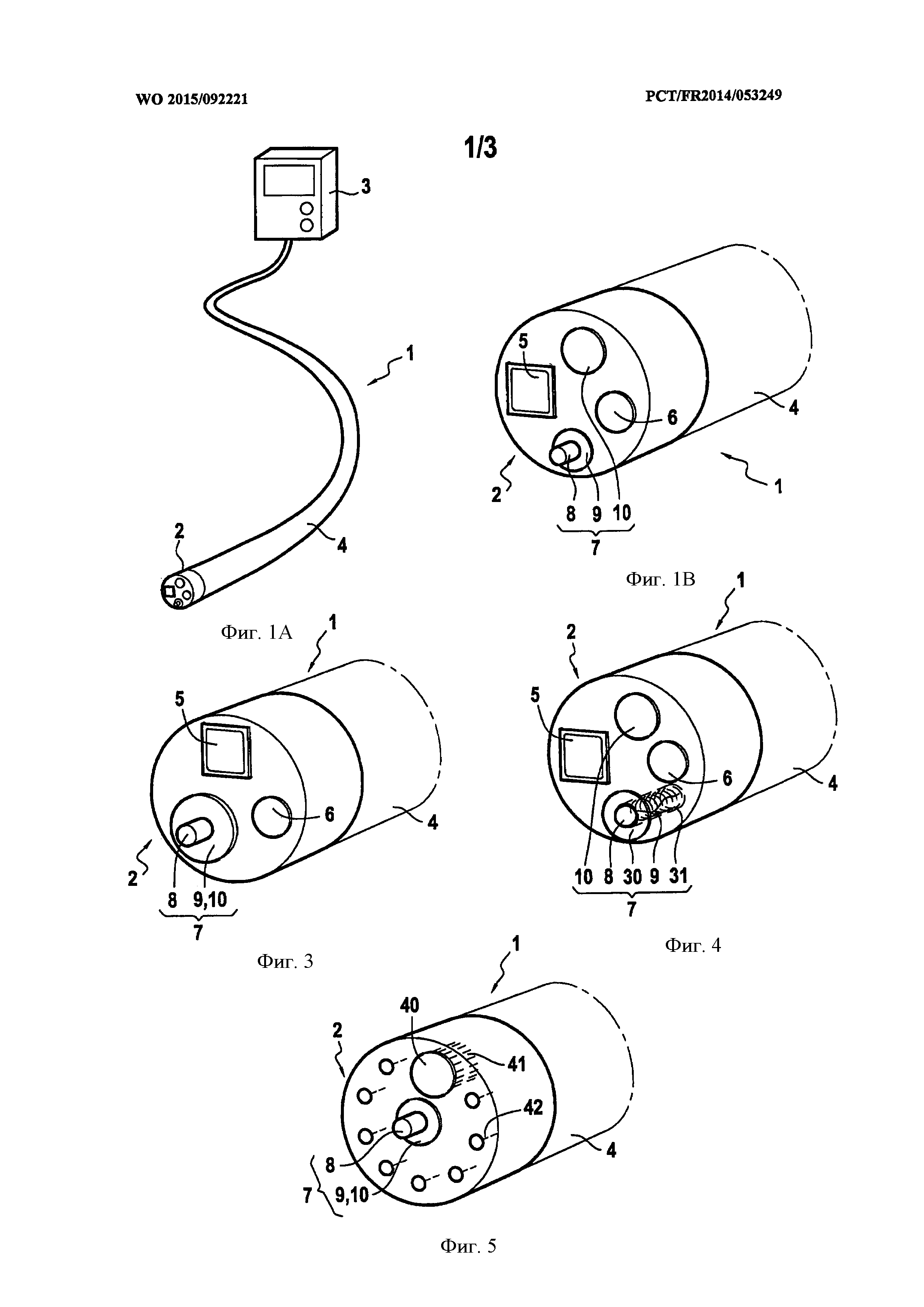
На фиг. 1А показан схематичный вид эндоскопа согласно первому варианту выполнения;
на фиг. 1B - детальный вид эндоскопической головки эндоскопа, показанного на фиг. 1A;
на фиг. 2А-2С - варианты использования эндоскопа, показанного на фиг. 1А, для контроля различных деталей газотурбинного двигателя;
на фиг. 3 - схематичный вид эндоскопической головки эндоскопа согласно второму варианту выполнения;
на фиг. 4 - схематичный вид эндоскопической головки эндоскопа согласно третьему варианту выполнения;
на фиг. 5 - схематичный вид эндоскопической головки эндоскопа согласно четвертому варианту выполнения;
на фиг. 6 - схематичный вид набора из первого и второго эндоскопов согласно шестому, варианту выполнения.
Осуществление изобретения
На фиг. 1A и 1B показан эндоскоп согласно первому варианту выполнения. Этот эндоскоп 1 содержит эндоскопическую головку 2, устройство 3 отображения и удлиненный элемент 4 в виде стебля, соединяющего эндоскопическую головку 2 с устройством 3 отображения и позволяющего вводить эндоскопическую головку 2 в узкие пространства, одновременно показывая пользователю снаружи через устройство 3 отображения изображения, снятые через эту эндоскопическую головку 2. В представленном варианте выполнения этот удлиненный элемент 4 является гибким и может изгибаться под углом по меньшей мере 30°, также возможно по меньшей мере 90°, между своими двумя концами, чтобы иметь возможность огибать препятствия на пути эндоскопической головки 2. Вместе с тем, в альтернативных вариантах выполнения этот удлиненный элемент может быть по существу жестким.
На фиг. 1B представлен детальный вид эндоскопической головки 2 эндоскопа 1 согласно этому первому варианту выполнения. Так, согласно этому первому варианту выполнения, эндоскоп 1 является видеоэндоскопом, и на эндоскопической головке 1 установлены видеокамера 5, которая может быть, например, датчиком типа DTC («прибор с: зарядовой связью», известный также под английским сокращением CCD) или CMOS ("комплементарный металло-оксидный полупроводник", то есть комплементарная МОП-структура), осветительное устройство 6, которое может быть, например, светодиодом, а также устройство 7 частотного контроля, содержащее контактный элемент 8, привод 9, выполненный с возможностью подачи импульса на объект частотного контроля через контактный элемент 8, и датчик 10 вибраций, выполненный с возможностью улавливания вибраций объекта частотного контроля в ответ на его механическое возбуждение через контактный элемент 8. Привод 9 может быть выполнен с возможностью подачи единственного импульса на объект частотного контроля через контактный элемент 8, чтобы возбудить его вибрацию за счет простого удара, или с возможностью возбуждения его вибрирования напротив объекта контроля. Материал контактного элемента 8 можно выбирать в зависимости от его использования. Так, например, если устройство 7 частотного контроля выполнено с возможностью возбуждения вибрационного ответа объекта контроля от простого удара, контактный элемент 8 можно выполнить из относительно твердого материала, такого как керамика или металлический материал. Если же контактный элемент 8 предназначен для передачи вибрации от привода 9 на объект частотного контроля, для этого контактного элемента 8 можно выбрать менее твердый материал, в частности такой, как эластомер или другой синтетический полимер.
В этом первом варианте выполнения привод 9 и датчик 10 вибраций являются двумя отдельными электромеханическими микросистемами. Например, привод 9 может быть пьезоэлектрическим, электростатическим или электромагнитным, тогда как датчик 10 вибраций является микрофоном, который тоже может быть, например, пьезоэлектрическим, электростатическим или электромагнитным. Однако в альтернативном варианте привод 9 может быть пневматическим приводом, тогда как датчик 10 вибраций может быть датчиком вибраций любого типа, контактным или бесконтактным, например, таким как акселерометр или лазерный виброметр или оптоволоконный микрофон.
Видеокамера 5 соединена с устройством 3 отображения через удлиненный элемент 4, а привод 9 и датчик 10 вибраций могут быть соединены через этот удлиненный элемент 4 соответственно с устройствами управления и анализа сигналов (не показаны), чтобы подавать импульс на объект частотного контроля через контактный элемент 8 и затем анализировать вибрации этого объекта частотного контроля в ответ на этот импульс, чтобы оценить его целостность. Эти соединения могут быть проводными, например, электрическими или оптоволоконными, или беспроводными, например, через радио или ультразвуковые преобразователи.
Таким образом, во время использования эндоскопическую головку 2 можно ввести в ограниченное и труднодоступное пространство и визуально направлять к объекту частотного контроля при помощи изображений, снимаемых видеокамерой 5, и при освещении от осветительного устройства 6. Вблизи указанного объекта частотного контроля можно активировать привод 9, чтобы подать импульс на объект частотного контроля через контактный элемент 8. В объекте частотного контроля в результате этого импульса появляются вибрации, и датчик 10 улавливает эти вибрации и, в случае необходимости, передает их через удлиненный элемент 4 для их анализа с целью определения целостности объекта частотного контроля.
На фиг. 2A-2C представлены примеры применения этого эндоскопа и осуществления способа частотного контроля при осмотре труднодоступных деталей в газотурбинной установке, в частности в газотурбинном двигателе 20, содержащем центробежный компрессор 21, камеру 22 сгорания, осевую турбину 23 высокого давления, соединенную во вращении с компрессором 21, осевую турбину 24 низкого давления, выходной силовой вал 25, соединенный во вращении с осевой турбиной 24 низкого давления, и механическую трансмиссию 26, соединенную с выходным силовым валом 25 и содержащую ряд зацепляющихся друг с другом шестерен 27.
На фиг. 2A показано использование эндоскопа 1 для визуального и частотного контроля лопаток центробежного компрессора 21. Для этого эндоскопическую головку вводят через воздухозаборник газотурбинного двигателя 20 и направляют к центробежному компрессору 21. Помимо визуального осмотра лопаток компрессора 21 через устройство 3 отображения эндоскопа 1, пользователь может также осуществить частотный контроль, активировав привод 9 для подачи импульса на каждую лопатку через контактный элемент 8, вызывая вибрации, которые будут улавливаться датчиком 10 вибраций и затем подвергаться анализу с целью выявления дефектов, которые было бы невозможно обнаружить путем простого визуального осмотра.
На фиг. 2B показано использование эндоскопа 1 для визуального и частотного контроля лопаток осевой турбины 23 высокого давления. Для этого эндоскопическую головку 2 вводят через выпускную трубу газотурбинного двигателя и его осевую турбину 24 низкого давления к осевой турбине 23 высокого давления. Таким образом, визуальный и частотный контроль лопаток осевой турбины 24 низкого давления можно осуществлять аналогично визуальному и частотному контролю лопаток компрессора 21, показанному на фиг. 2A.
На фиг. 2C показано использование эндоскопа 1 для визуального и частотного контроля шестерни 27 механической трансмиссии 26. В данном случае после открывания смотровой крышки 28 в механической трансмиссии 26 в нее вводят эндоскопическую головку 2 для осуществления визуального и частотного контроля шестерни 27 в реальных условиях зацепления аналогично визуальному и частотному контролю лопаток, показанному на фиг. 2A и 2B.
Для эндоскопа можно также предусмотреть альтернативные варианты выполнения. Так, на фиг. 3 показана эндоскопическая головка 2 эндоскопа 1 согласно второму варианту выполнения, в котором привод 9 и датчик 10 вибраций интегрированы в одну электромеханическую микросистему. Таким образом, один и тот же пьезоэлектрический, электромагнитный или электростатический элемент, служащий для подачи импульса на объект частотного контроля через контактный элемент 8, служит также для улавливания затем вибрационного ответа от этого объекта частотного контроля. Остальные элементы этого эндоскопа 1 эквивалентны первому варианту выполнения и имеют такие же цифровые обозначения.
В двух предыдущих вариантах выполнения контактный элемент неподвижно соединен со своим приводом, что ограничивает зону его действия. В третьем варианте выполнения, показанном на фиг. 4, контактный элемент 8 представляет собой шарик, удерживаемый в эндоскопической головке 2 с преодолением действия пружины, образующей привод 9, при помощи электромагнита 30. Деактивация этого электромагнита 30 приводит к появлению импульса в контактном элементе 8, который передает его на объект контроля таким образом, чтобы вызвать его вибрационный ответ при простом прикосновении или ударе. Альтернативно этому приводу можно предусмотреть другие типы приводов, например, пневматические или магнитные приводы. Хотя контактный элемент 8 может быть удален от эндоскопической головки 2, он все же может быть связан с ней через провод 31, что позволяет не загрязнять пространство, в котором происходит осмотр. Другие элементы эндоскопа 1 эквивалентны первому варианту выполнения и имеют такие же цифровые обозначения.
В трех предыдущих вариантах выполнения эндоскоп 1 является видеоэндоскопом. Однако те же принципы можно применять для оптического эндоскоп, соответствующего четвертому варианту выполнения, эндоскопическая головка 2 которого показана на фиг. 5. Таким образом, эта эндоскопическая головка 2 содержит не видеокамеру, а оптический объектив 40, соединенный с устройством отображения на другом конце удлиненного элемента 4 через оптические волокна 41. Это устройство отображения может быть простым оптическим видоискателем. Кроме того, чтобы еще больше ограничить габарит и уменьшить сложность эндоскопической головки 2, осветительное устройство установлено не на ней, а на другом конце удлиненного элемента 4, и удлиненный элемент содержит также другие оптические волокна 42 для передачи на эндоскопическую головку света, излучаемого этим осветительным устройством. Другие элементы этого эндоскопа 1 эквивалентны второму варианту выполнения и, следовательно, имеют такие же цифровые обозначения.
Кроме того, эндоскоп не обязательно должен быть гибким.
Нет также необходимости в установке средств, предназначенных для возбуждения вибрационного ответа, на той же эндоскопической головке, что и датчик вибраций, предназначенный для его улавливания. Так, в шестом варианте выполнения, показанном на фиг. 6, используют набор из двух эндоскопов 1 и 1'. Первый эндоскоп 1 аналогичен эндоскопу из первого варианта выполнения, если не считать отсутствия контактного элемента 8 и привода 9 на эндоскопической головке 2. Действительно, эти элементы установлены на эндоскопической головке 2' второго эндоскопа 1', тоже аналогичного первому варианту выполнения, если не считать отсутствия датчика вибраций. Таким образом, благодаря этому набору, можно вызывать вибрации в объекте частотного контроля в одном месте при помощи второго эндоскопа 1' и улавливать эти вибрации в другом месте при помощи первого эндоскопа 1. Остальные элементы первого и второго эндоскопов 1, 1' эквивалентны элементами эндоскопа 1 из первого варианта выполнения и имеют такие же цифровые обозначения.
Хотя настоящее изобретение было описано со ссылками на конкретные примеры выполнения, очевидно, что в эти примеры можно вносить различные изменения, не выходя при этом за пределы общего объема изобретения, определенные формулой изобретения. Кроме того, отдельные признаки вышеупомянутых различных вариантов выполнения можно комбинировать в дополнительных вариантах выполнения. В частности, хотя оба эндоскопа из шестого варианта выполнения аналогичны эндоскопу из первого варианта выполнения, в каждый из них можно включить признаки других вариантов выполнения альтернативно или дополнительно к уже описанным признакам. Следовательно, описание и чертежи можно рассматривать как иллюстративные и не ограничительные примеры.
Реферат
Изобретение относится к области контроля механических деталей и, в частности, к эндоскопу (1), выполненному с возможностью использования для частотного контроля труднодоступной детали, а также к способу использования этого эндоскопа (1), который содержит эндоскопическую головку (2), устройство (3) отображения изображений, снимаемых через указанную эндоскопическую головку (2), и удлиненный элемент (4), соединяющий эндоскопическую головку (2) с устройством (3) отображения, при этом эндоскопическая головка (2) содержит также устройство (7) частотного контроля, содержащее по меньшей мере один датчик (10) вибраций, предназначенный для улавливания вибрационного ответа объекта частотного контроля. Технический результат – диагностирование труднодоступных деталей, сокращение времени. 4 н. и 7 з.п. ф-лы, 9 ил.
Комментарии