Прицельное устройство для транспортного средства и соответствующее транспортное средство - RU2754120C2
Код документа: RU2754120C2
Чертежи
Описание
Изобретение относится к прицельному устройству. Изобретение также относится к транспортному средству, снабженному таким прицельным устройством.
Изобретение относится к области наземных транспортных средств, в которых требуется вести обзор окружающего пространства. В военной области такой обзор производят из танков, используя прицельные устройства, применяемые, в частности, для стрельбы.
Известны прицельные устройства, содержащие оптико-электронную часть с датчиками, приспособленную к перемещению относительно опоры. Такие прицельные устройства расположены «поверх брони».
Однако такие прицельные устройства не обеспечивают возможность прямого визуального обзора оперативной обстановки. Такой обзор является важным при неисправности оптико-электронных датчиков.
Другой тип прицельного устройства, называемый «прямым видоискателем», предполагает использование прицельной системы в виде монокуляра или бинокля, расположенных в транспортном средстве. Доступ к окружающей среде при этом осуществляется посредством прямого обзора через проем, выполненный в стенке транспортного средства.
Тем не менее, такое прицельное устройство является обычно массивным, и для него требуется большой проем в стенке транспортного средства, в частности, в случае, когда требуется дублирование прицельной системы, чтобы у командира транспортного средства была собственная прицельная система.
Из документа FR 2,584,202 A1 известно стабилизированное прицельное устройство, содержащее камеру, чувствительную к тепловому инфракрасному (ИК) излучению, установленную на платформе с возможностью вращения вокруг первой оси на мобильном оборудовании, вращаемом на платформе вокруг второй оси, перпендикулярной к первой оси, при этом камера снабжена системой инерционной стабилизации вокруг двух осей. Устройство также содержит оптический видоискатель, содержащий направляющее зеркало, установленное на блоке и приводимое в действие с соотношением 1:2 при вращении вокруг оси, параллельной первой, и смещающий оптический блок, возвращающий луч света, отраженный направляющим зеркалом.
Однако масса зеркала нарушает инерцию устройства, в результате чего устройство становится менее стабильным так, что устройство включает в себя использование инерционной массы для стабилизации прицеливания оптико-электронной головки, что осуществляют посредством массы ИК камеры.
По этой причине существует потребность в прицельном устройстве, обеспечивающем возможность оператору производить прямой обзор оперативной обстановки, окружающей транспортное средство, при этом прицельное устройство было бы более компактным и более стабильным.
Поставленная задача решается прицельным устройством для транспортного средства, содержащего стенку, ограничивающую внутреннее пространство от внешнего пространства, при этом прицельное устройство содержит опору, установленную с возможностью вращения относительно стенки вокруг первой оси и определяющую внутренний объем; оптико-электронную головка для опосредованного визуального наблюдения первой части окружающего пространства снаружи транспортного средства, установленную с возможностью вращения на опоре вокруг второй оси, перпендикулярной первой оси; прямой оптический канал для визуального наблюдения второй части окружающего пространства снаружи транспортного средства, включающий в себя собирающий оптический блок, приспособленный для улавливания части окружающего пространства снаружи транспортного средства и установленный с возможностью вращения вокруг второй оси; и оптическую передающую систему, приспособленную для передачи изображения, собранного собирающим оптическим блоком, к по меньшей мере одному предварительно заданному месту во внутреннем пространстве и содержащую множество оптических компонентов, одна часть из которых расположена во внутреннем пространстве, а другая часть расположена во внутреннем объеме опоры. Прицельное устройство содержит приводные средства для приведения в движение оптико-электронной головки и собирающего оптического блока так, чтобы, при повороте оптико-электронной головки на первый заданный угол вокруг второй оси, собирающий оптический блок выполнял поворот на второй заданный угол вокруг второй оси, при этом соотношение двумя углами составляет от 0,99 до 1,01, предпочтительно 1,0.
Согласно вариантам выполнения, прицельное устройство обладает одним или несколькими признаков, рассматриваемыми отдельно или согласно любым технически возможным комбинациям:
- собирающий оптический блок является самоинерционным для стабилизации вокруг оси;
- оптическая передающая система, содержащая поворотную линзу, выполнена с возможностью ориентации изображения, полученного в предварительно заданном месте, так, чтобы оно имело одну и ту же ориентацию во всех возможных положениях опоры и приводных средств;
- прямой оптический канал содержит по меньшей мере два блока, каждый из которых приспособлен для выполнения специальной функции в прицельном устройстве и имеет вход, оптическую передающую систему, содержащую переключатель, обеспечивающий возможность выбора одного из предварительно заданных мест, к которому эта оптическая передающая система приспособлена передавать изображения, собранное собирающим оптического блоком так, чтобы каждое предварительно заданное место представляло собой вход блока, для которого выбрана специальная функция;
- блоки, выполняющие специальную функцию в прицельном устройстве, выбраны из группы, включающую в себя: обзорный блок, окуляр, монокуляр, бинокль, экран на органических светоизлучающих диодах, лазер и камеру;
- передающая система, выполнена так, чтобы оптический луч между компонентами во внутреннем пространстве и компонентами во внутреннем объеме представлял собой параллельный оптический луч;
- определены направляющая высоты и относительное направление пеленга, при этом первая ось параллельна относительному направлению пеленга, а вторая ось параллельна направлению высоты.
Изобретение также относится к транспортному средству, содержащему вышеописанное прицельное устройство.
Согласно одному из вариантов выполнения, оптическая передающая система содержит отверстие, диаметр которого меньше или равен 100 мм, пригодное для оптических систем, при этом стенка также содержит отверстие, обеспечивающее герметичность стенки относительно внешнего пространства.
Другие особенности и преимущества изобретения станут понятны из последующего описания вариантов выполнения, представленного в виде примеров и со ссылками на чертежи.
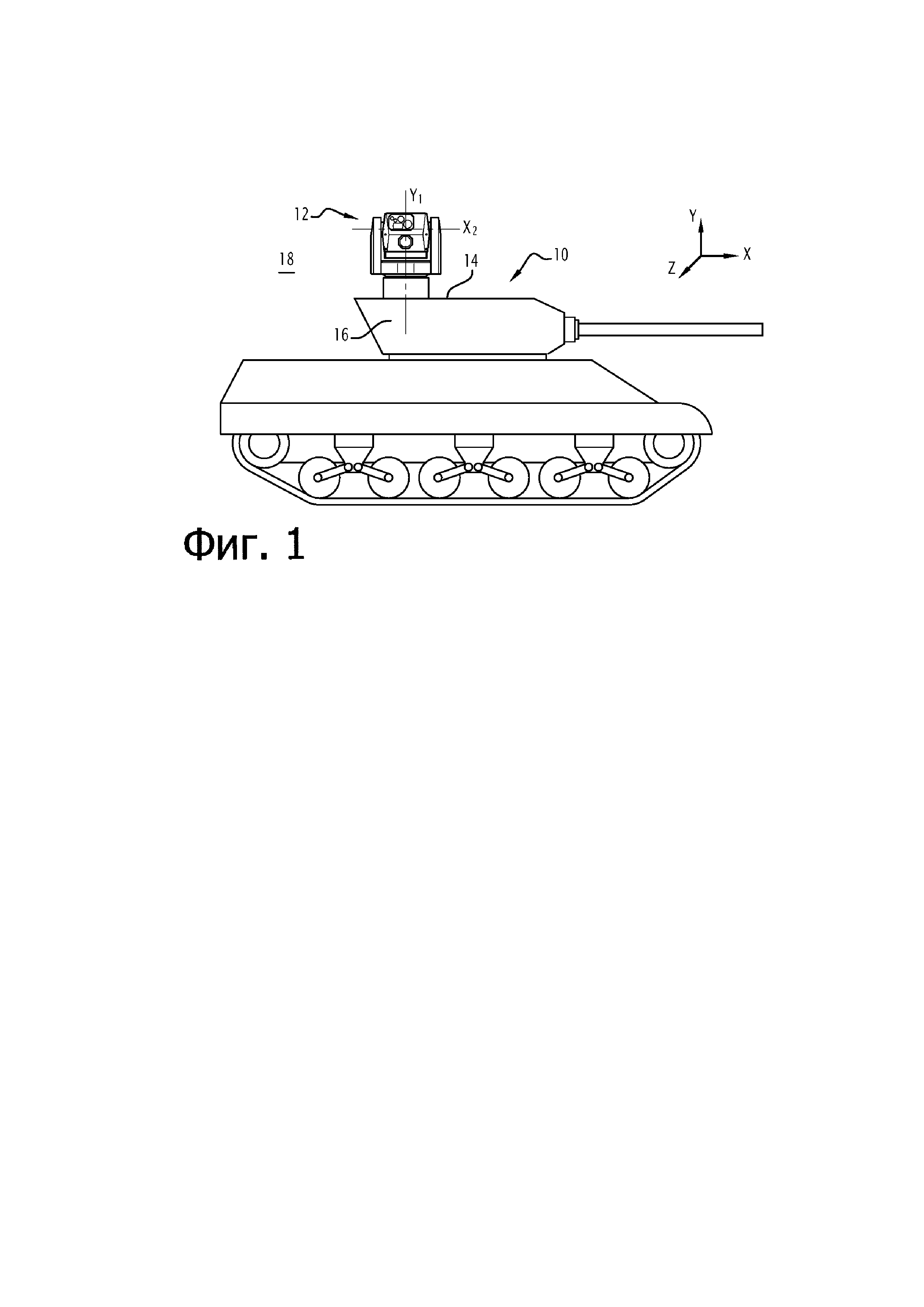
На фиг. 1 схематично показано транспортное средство, снабженное прицельным устройством согласно варианту выполнения;
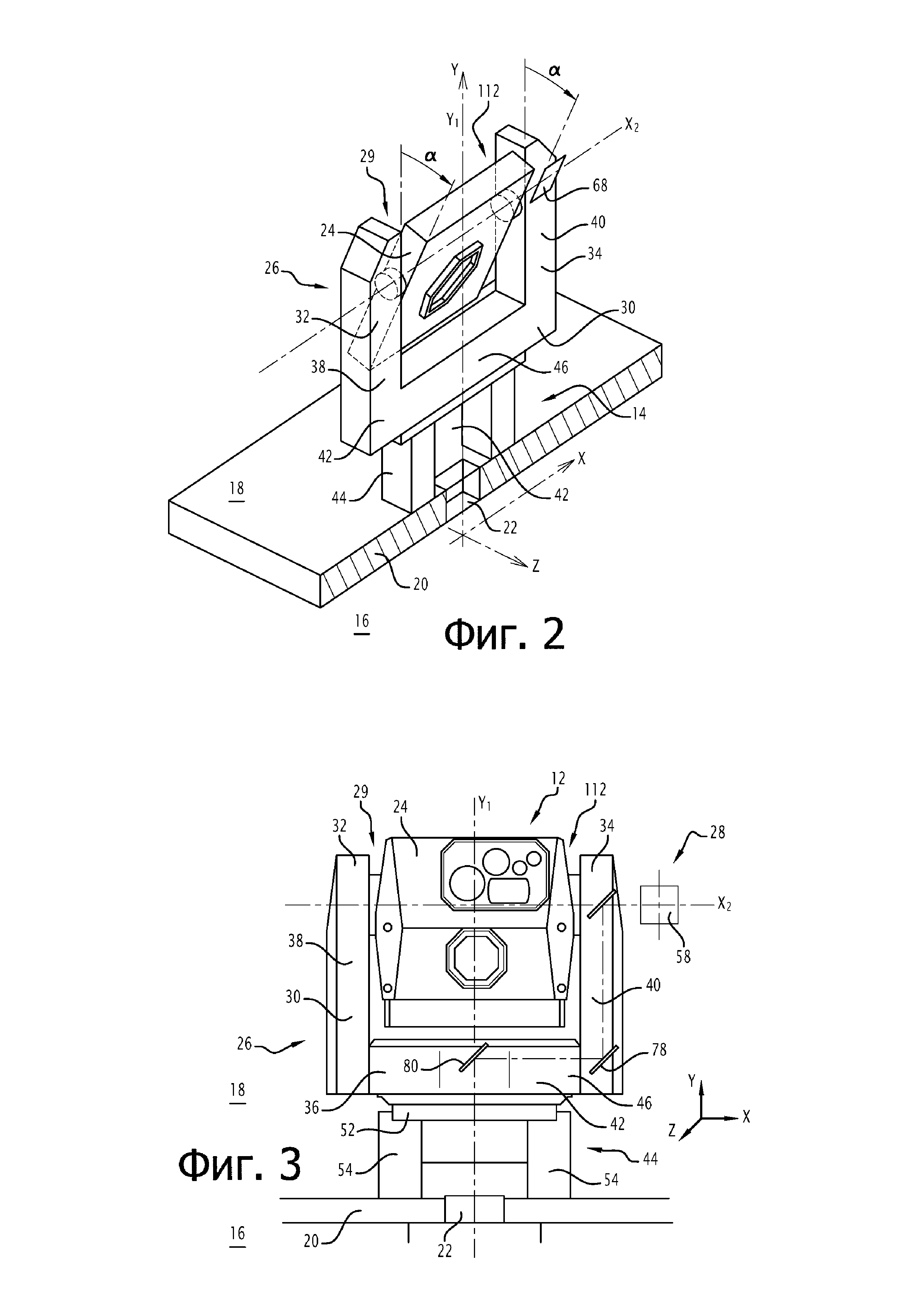
на фиг. 2 - прицельное устройство по фиг. 1, вид сбоку в перспективе с разрезом;
на фиг. 3 - прицельное устройство по на фиг. 1, схематичный вид сбоку;
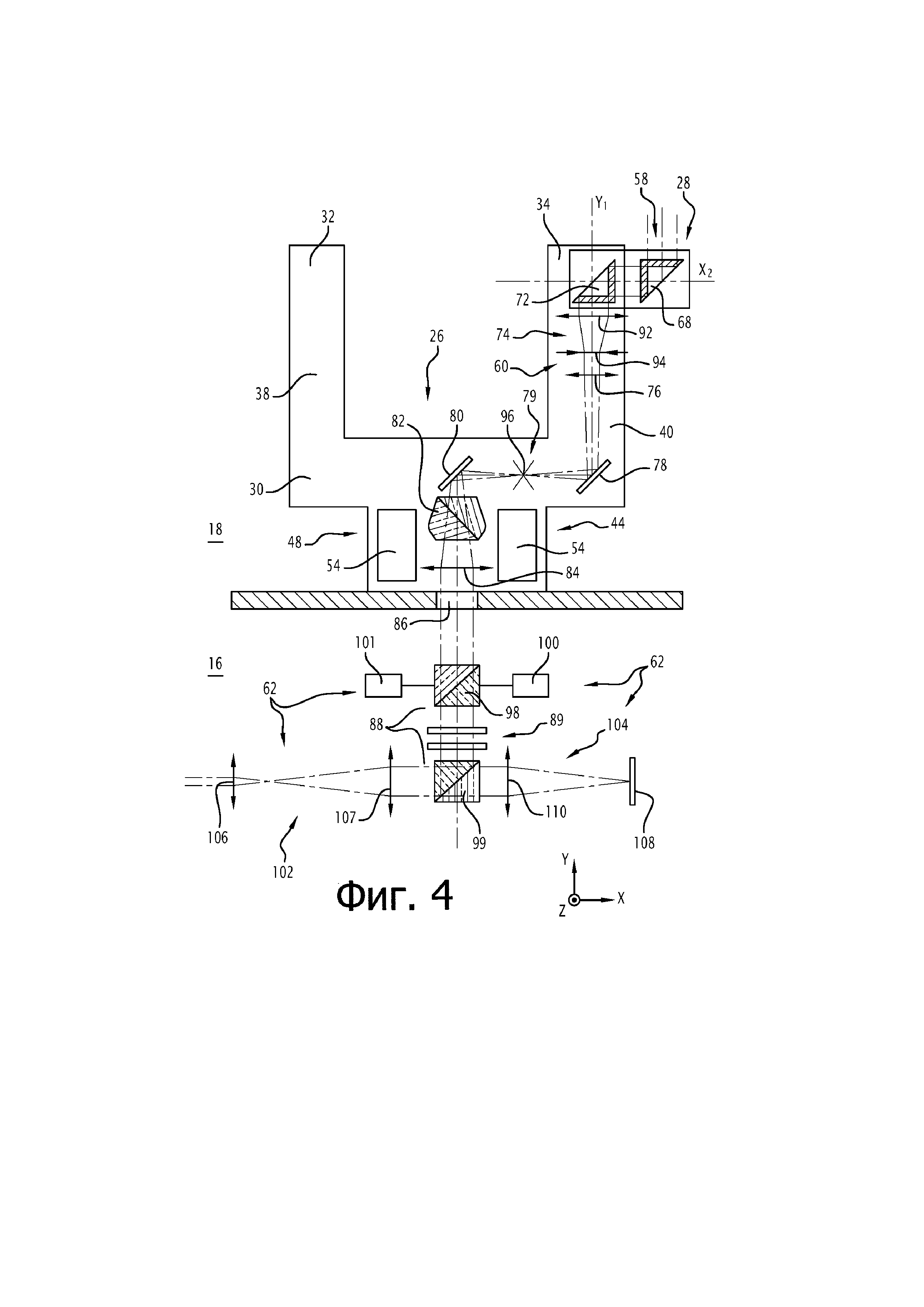
на фиг. 4 - прицельное устройство по фиг. 1, вид в разрезе;
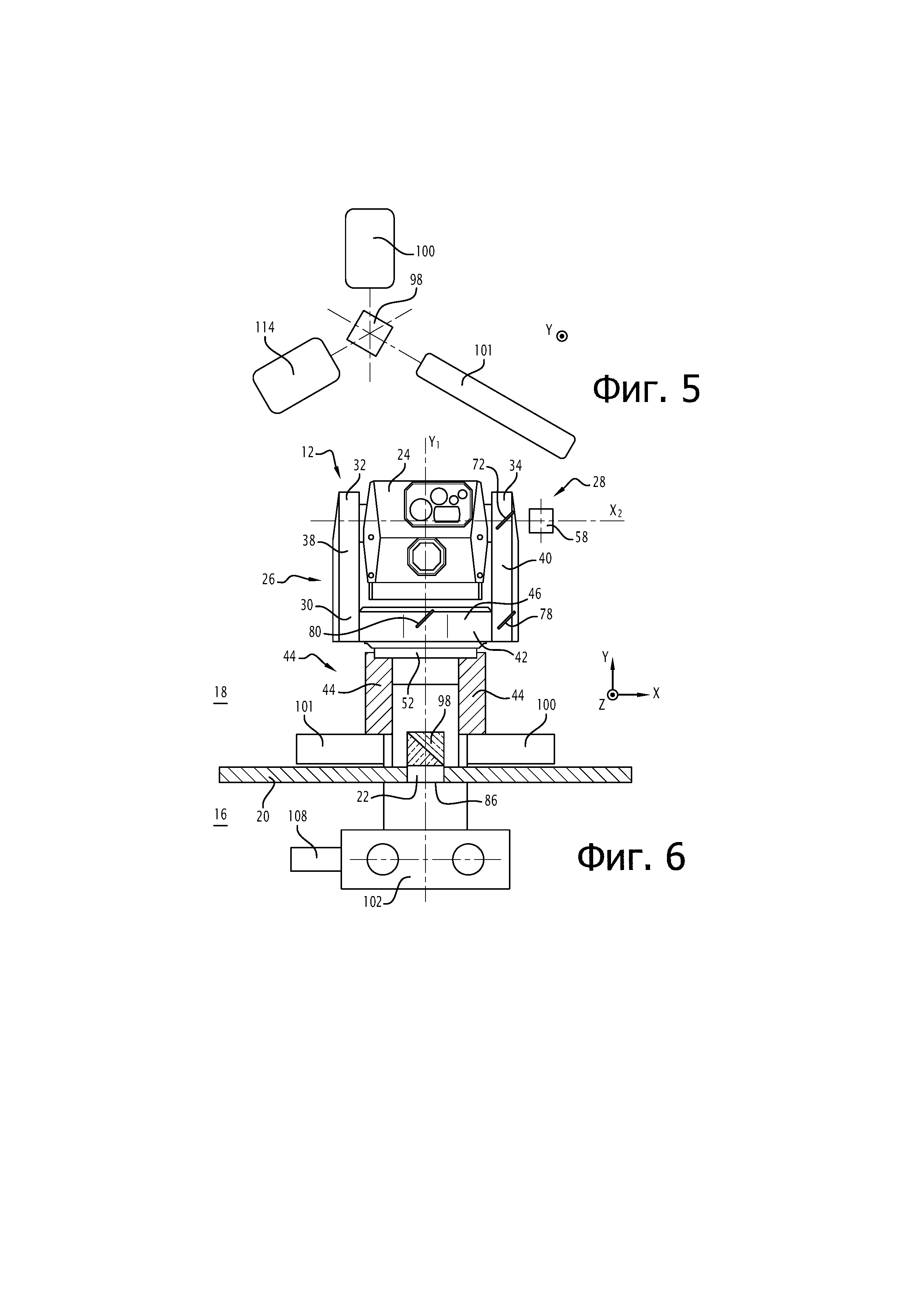
на фиг. 5 - прицельное устройство согласно варианту выполнения, схематичный вид сверху; и
на фиг. 6 - прицельное устройство согласно другому варианту выполнения.
На фиг. 1 показано транспортное средство 10, снабженное прицельным устройством 12.
Транспортное средство 10 является наземным транспортным средством.
Транспортное средство 10 является, например, транспортным средством военного типа, например, танком.
Такое транспортное средство 10 пригодно для размещения множества типов оружия и защитных средств по меньшей мере для одного оператора, находящегося внутри транспортного средства 10. Например, транспортное средство 10 содержит пушку.
Транспортное средств 10 содержит стенку 14, ограничивающую внутреннее пространство 16 от внешнего пространства 18.
В частности, в военном деле, такое внутреннее пространство 16 является пространством, подлежащим защите, так как оно является пространством, в котором перемещается (перемещаются) оператор (операторы), тогда как внешнее пространство 18 является театром действий, в котором безопасность более сложно гарантировать в зависимости от рассматриваемого окружающего пространства.
Стенка 14 содержит две части 20 и 22, в частности, показанные на фиг. 2.
Первая часть 20 стенки 14 изготовлена из первого непрозрачного материала.
Обычно, первый непрозрачный материал является достаточно прочным для создания брони транспортного средства 10, при этом транспортное средство 10 должно выдерживать попадание снарядов.
Вторая часть 22 стенки 14 изготовлена из второго прозрачного материала.
Прицельное устройство 12 описано более точно со ссылками на фиг. 2-4.
Для удобства указаны направления.
Направление, перпендикулярное к стенке 14, обозначено на фиг. 2 как ось Y. Это направление соответствует относительному направлению пеленга и в остальной части описания называется относительным направлением пеленга Y.
Указано также первое поперечное направление, расположенное в плоскости фиг. 2, при этом первое поперечное направление перпендикулярно направлению пеленга. Это направление обозначено на фиг. 2 как ось X. Это направление соответствует направлению высоты и в остальной части описания называется направлением высоты X.
Указано также второе поперечное направление, и оно обозначено на фиг. 2 как ось Z. Второе поперечное направление Z перпендикулярно направлению пеленга Y и направлению высоты X.
Прицельное устройство 12 содержит: оптико-электронную головку 24, опору 26, прямой оптический канал 28 и приводные средства 29.
Оптико-электронная головка 24 представляет собой оптико-электронную головку для обозревания части окружающего пространства во внешнем пространстве 18 относительно транспортного средства 10.
Оптико-электронная головка 24 содержит, например, камеры, приспособленные к захвату видимого света, черно-белыми и/или цветными ИК камерами, телеметрическими камерами или наводчиками. Видеосъемку и данные, собранные с помощью оптико-электронной головки, направляют внутрь транспортного средства 10 посредством аналоговых и/или цифровых сигналов.
Опора 26 предназначена для поддержания оптико-электронной головки 24 с возможностью перемещения относительно второй оси X2. Оптико-электронная головка 24 установлена с возможностью поворота на опоре 26 вокруг второй оси X2.
Согласно показанному примеру, вторая ось X2 параллельна направлению высоты X.
Опора 26 содержит стенку, которая ограничивает внутренний объем 30.
Опору 26 можно перемещать вокруг первой оси Y1, при этом первая ось Y1 параллельна направлению пеленга Y.
В частности, опора 26 содержит две боковины 32 и 34 и основание 36.
Две боковины 32 и 34, и основание 36 расположены так, чтобы была образована, по существу, U-образная часть.
В конкретном примере, представленном на фиг. 2, две боковины 32 и 34 являются одинаковыми.
Каждая из двух боковин 32 и 34 расположена с одной из боковых сторон оптико-электронной головки 24 для обеспечения возможности её поддержания.
Каждая из боковин 32 и 34 проходит в основном вдоль относительного направления пеленга Y.
Стенка каждой боковины 32 и 34 изготовлена из сплава на основе алюминия.
Для каждой из боковин 32 и 34 указан внутренний объем 38 и 40.
Согласно показанному примеру, каждая боковина 32 и 34 имеет, по существу, форму параллелепипеда.
Основание 36 содержит две части: центральную часть 42, соединяющую две боковины 32 и 34, и часть 44, сопряженную со стенкой 14.
Центральная часть 42 выполнена полой так, чтобы центральный объем 46 мог быть также определен для центральной части 42.
В рассматриваемом случае внутренний объем 30 опоры 26 представляет, таким образом, сумму боковых объемов 38 и 40, и центрального объема 46.
Сопрягающая часть 44 является механической поверхностью контакта, имеющей согласно фиг. 3, цилиндрическую форму с выполненной полой центральной частью, при этом сопрягающая частью ограничивает внутренний объем 54.
Сопрягающая часть 44 служит опорой для сопрягающей части 52, которой ограничен внутренний объем. Форму сопрягающей части 52 выбирают так, чтобы она была приспособлена к форме оптико-электронной головки 24.
Объем, ограниченный суммой внутренних объемов сопрягаемой части 52 и центрального объема 46 центральной части 42, содержит: двигатели, счетно-решающие устройства, предназначенные для управления двигателями, а также электрическое поворотное соединение и/или оптическое волокно, которые способны передавать сигналы или данные между оптико-электронной головкой 24 и внутренними устройствами транспортного средства 10.
Двигатели приспособлены для приведения во вращение опоры 26 относительно стенки 14 вокруг первой оси Y1.
Сопрягающая часть 44 является, согласно вариантам осуществления, неподвижной или поднимаемой. На фиг. 3, сопрягающая часть 44 является неподвижной.
Прямой оптический канал 28 приспособлен к визуальному наблюдению части окружающего внешнего пространства 18 вокруг транспортного средства 10.
Термин «прямой» следует понимать как противоположный термину «опосредованный».
Действительно, под прямым обзором понимается обзор, который может проводить человек непосредственно, тогда как опосредованный обзор является обзором через экран, посредством которого принимают действие всех элементов, вовлеченных в обзор оперативной обстановки на экране.
Прямой оптический канал 28 (фиг. 4) содержит: собирающий оптический блок 58, оптическую передающую систему 60 и множество блоков 62.
Собирающий оптический блок 58 предназначен для улавливания части окружающего внешнего пространства 18 вокруг транспортного средства 10.
Согласно показанному примеру, собирающий оптический блок 58 содержит первую призму 68.
В варианте осуществления собирающий оптический блок 58 представляет собой плоское зеркало, установленное на боковине 34 опоры 26.
Собирающий оптический блок 58 установлен с возможностью поворота относительно боковины 34 опоры 26 вокруг второй оси X2.
Оптическая передающая система 60 может передавать изображение, уловленное посредством собирающего оптического блока 58, в одно или несколько предварительно заданных мест во внутреннем пространстве 16.
Собирающий оптический блок 58 является устройством, самоинерционным для стабилизации вокруг второй оси X2. Другими словами, собирающий оптический блок 58 выполнен таким образом, чтобы, во время движения транспортного средства 10, вызывающего механическую вибрацию опоры 26, собирающий оптический блок 58 оставался, по существу, неподвижным при повороте вокруг второй оси X2.
Собирающий оптический блок 58 обладает моментом инерции, который выше порогового момента инерции, при этом пороговый момент инерции соответствует вращательной устойчивости 0,1° при повороте на 10° вокруг второй оси X2.
Оптическая передающая система 60 содержит множество оптических компонентов.
Оптическим компонентом, в данном контексте, называют оптический компонент, обеспечивающий возможность прямого визуального наблюдения оператором.
По этой причине, камера или любое другое электронное устройство не может рассматриваться как оптический компонент.
Одна часть оптических компонентов находится во внутреннем пространстве 16 транспортного средства 10, а другая часть оптических компонентов находится во внутреннем объеме 30 опоры 26.
Каждый компонент используется для передачи света или для контроля за его направлением, или для предотвращения его прохода, в частности, если система содержит запирающие элементы.
Ниже описана конкретная узел (фиг. 4), но следует понимать, что, конечно, возможны и другие узлы для выполнения аналогичной функции.
В конкретном примере (фиг. 4) оптическая передающая система 60 содержит: вторую призму 72; бинокль Галилея 74; первую линзу 76; первое отражающее зеркало 78; полевую линзу 79; второе отражающее зеркало 80; поворотную линзу 82; вторую линзу 84; отверстие 86; переключатель 88 и запирающую систему 89.
Указанные выше компоненты представлены в определенном порядке: сверху – вниз; верхняя сторона указана как место, откуда передающая система 60 принимает наружное изображение, собранное с помощью собирающего оптического блока 58; а нижняя сторона указана как место, куда передающая система 60 передает изображение части внешнего пространства 18, собранной посредством собирающего оптического блока 58, т.е. к предварительно заданному месту или к каждому предварительно заданному месту во внутреннем пространстве 16.
Боковой объем 40 боковины 34 проходит в основном вдоль относительного направления пеленга Y.
Боковой объем 40 содержит среднюю плоскость, проходящую вдоль поперечных направлений X и Z, и определяемую как плоскость, делящую боковой объем 40 на две части одинакового объема, проходящих вдоль относительного направления пеленга Y, а именно: верхняя часть расположена выше средней плоскости, а нижняя часть расположена ниже средней плоскости.
Вторая призма 72 расположена в верхней части внутреннего объема 40 боковины 34.
Вторая призма 72 является полностью отражающей призмой.
Вторая призма 72 изготовлена из материала, выбираемого для обеспечения возможности пропуска оптического потока, соответствующего оптической ширине полосы пропускания, используемой в прямом оптическом канале 28.
Вторая призма 72 является неподвижной.
Вторая призма 72 приспособлена к отражению луча, идущего от первой призмы 68, которая составляет собирающий оптический блок 58, к биноклю Галилея 74.
Согласно другому варианту осуществления вторую призму 72 заменяют плоским зеркалом, составляющим угол в 45° с относительным направлением пеленга Y.
Бинокль Галилея 74 расположен в верхней части внутреннего объема 40 боковины 34.
Согласно конкретному примеру, представленному на фиг. 4, бинокль Галилея 74 содержит две группы линз: первую группу линз 92 и вторую группу линз 94.
Бинокль Галилея 74 пригоден для регулирования размера падающего луча света.
Бинокль Галилея 74 обладает увеличением, приспособленным к типу оперативной обстановки, подлежащей визуальному наблюдению.
Первая линза 76 расположена вдоль направления высоты X, в средней плоскости внутреннего объема 40.
Первая линза 76 приспособлена к созданию изображения обозреваемой части внешнего окружающего пространства, из собранного изображения, и приспособлена к интеграции, в созданное изображение, перекрестий 96 рядом с полевой линзой 79.
Согласно показанному примеру, первая группа 76 линз представляет собой собирающую линзу.
Первое зеркало 78 является плоским зеркалом, расположенным в нижней части внутреннего объема 40 боковины 34.
Второе зеркало 80 является плоским зеркалом, расположенным в центральном объеме центральной части 42 опоры 26.
Два отражающих зеркала 78 и 80 расположены так, чтобы луч, прошедший через боковину 34, отражался в центральной части 42, параллельной относительному направлению пеленга Y.
Между двумя отражающими зеркалами 78 и 80, луч сходится в фокусе. Перекрестия 96 и полевая линза 79 расположены в фокусе.
Посредством полевой линзы 79 обеспечивают возможность оптимизации поля полного света, и с помощью перекрестий 96 обеспечивают возможность повышения точности прицеливания.
Согласно одному варианту осуществления полевая линза 79 не содержит перекрестий 96.
Поворотная линза 82 выполнена в виде сборки из двух призм, разделенных воздушным ножом и расположенных с образованием призмы Пехана.
Согласно одному варианту осуществления поворотная линза 82 расположена перед линзой 84.
Этим обеспечивают возможность схождения оптического луча между компонентами во внутреннем пространстве 16 и компонентами во внутреннем объеме 30.
В варианте выполнения допустимо использовать любой другой тип поворотной линзы 82, и она может быть расположена либо перед линзой 84, либо после линзы 84. Например, поворотной линзой 82 может служить призма Дове. В этом случае поворотная линза 82 расположена в зоне, где оптический луч является параллельным оптическим лучом.
Поворотная линза 82 расположена с возможностью получения, в заданном месте или в каждом заданном месте, изображения с той же ориентацией, независимо от поворотных перемещений оптико-электронной головки 24 и опоры 26.
Вторая линза 84 введена между отверстием 86 и поворотной линзой 82.
Вторая линза 84 расположена так, чтобы оптический луч, передаваемый во внутреннее пространство 16 через отверстие 86, являлся параллельным оптическим лучом.
Отверстие 86 составляет вторую часть 22 стенки 14, ограничивающей внутреннее пространство 16 от внешнего пространства 18.
Отверстие 86 закрыто материалом, прозрачным для видимого спектра (излучения, имеющего длину волны от 400 нанометров до 800 нанометров), а также в следующих доменах: вблизи ИК излучения (также обозначаемого сокращенно NIR – Near infrared -свет ближней длинноволновой ИК области спектра) и коротковолнового ИК излучения (также обозначаемого сокращенном SWIR – Short wavelength IR – коротковолновая ИК область спектра).
Отверстие 86 выполнено для обеспечения возможности прохода изображения, передаваемого оптической передающей системой 60 из внешнего пространства 18 во внутреннее пространство 16.
Отверстие 86 имеет диаметр, меньший или равный 100 мм, и предназначено для обеспечения герметичности стенки 14 относительно внешнего пространства 18. Указанный диаметр соответствует применяемому в оптических системах диаметру, т.е. часть отверстия 86 предназначена для прохода оптических лучей.
Согласно варианту выполнения прямой оптический канал 28 не содержит герметизированного отверстия.
Для части оптических компонентов, расположенных во внутреннем пространстве 16, в описанном примере, оптическая передающая система 60 содержит переключатель 88, содержащий первый куб 98 и второй куб 99.
Согласно варианту выполнения кубы 98 и 99 являются пластинами с параллельными гранями.
Переключатель 88 приспособлен для выбора одного из предварительно заданных мест, к которому оптическая передающая система 60 будет направлять уловленное изображение. В примере, представленном на фиг. 4, такой выбор осуществляют посредством двух кубов 98 и 99.
Согласно примеру на фиг. 4, первый куб 98 взаимодействует с двумя предварительно заданными местами.
Под словом «взаимодействует» здесь понимают способность куба передавать собранное изображение к предварительно заданному месту.
Второй куб 99 взаимодействует с двумя другими предварительно заданными местами.
Между кубами 98 и 99 введена запирающая система 89.
Запирающая система 89 содержит множество запирающих элементов, два из которых показаны на фиг. 4.
Каждый запирающий элемент проходит в основном вдоль направления высоты X.
Запирающая система 89 обеспечивает возможность защиты оператора транспортного средства 10 от внешних и внутренних лазерных лучей, а также обеспечивают возможность мониторинга оперативной обстановки.
В показанном примере каждый блок 62 содержит вход и выполняет функцию.
Каждое предварительно заданное место соответствует входу блока 62. В описанном примере, таким образом, можно считать, что первый куб 98 взаимодействует с первым блоком 100 и вторым блоком 101, тогда как второй куб 99 взаимодействует с третьим блоком 102 и четвертым блоком 104.
В целом, блоки 62 выполняют специальную функцию в прицельном устройстве 12, а с помощью переключателя 88 обеспечивают возможность выбора одного из предварительно заданных мест, к которому оптическая передающая система 60 способна передавать изображение, уловленное собирающим оптическим блоком 58, таким образом, чтобы каждое предварительно заданное место являлось входом блока 62, для которого была выбрана специальная функция.
Блоки 62 выполняют специальную функцию в прицельном устройстве 12, и их выбирают из группы, состоящей из: обзорного блока, окуляра, монокуляра, бинокля, экрана на органических светоизлучающих диодах, лазера и камеры.
В описанном примере первый блок 100 представляет систему устранения расплывчатости изображения.
Система 100 устранения расплывчатости изображения является мощным лазером, достаточно действенным для обеспечения четкости изображения потенциальной цели.
Второй блок 101 является датчиком, приспособленным к обеспечению дополнительного электронного визуального наблюдения.
Третий блок 102 является биноклем 102, обеспечивающим возможность оператору смотреть своими глазами; бинокль 102 используют для регулирования размеров луча.
Согласно примеру, представленному на фиг. 4, бинокль 102 содержит две линзы 106 и 107, и систему деления луча (не показана), приспособленную к направлению оптического луча к каждому из окуляров бинокля 102.
Четвертый блок 104 содержит экран 108 типа OLED (ОСИД – дисплей на органических светоизлучающих диодах), а также фокусирующий оптический блок 110.
Разрешающая способность экрана 108 сопоставима с матрицей датчика различных используемых камер.
Приводные средства 29 приспособлены к приведению во вращение оптико-электронной головки 24 и собирающего оптического блока 58 вокруг второй оси X2.
Приводные средства 29 приспособлены к приведению в движение оптико-электронной головки 24 и собирающего оптического блока 58 так, чтобы, при повороте оптико-электронной головки 24 на первый заданный угол α вокруг второй оси X2, собирающий оптический блок 58 поворачивался на второй заданный угол вокруг второй оси X2, при этом соотношение между двумя углами составляет от 0,99 до 1,01, предпочтительно оно равно 1.
Приводные средства 29 выполнены, например, в виде двигателя, связанного с приводным валом 112, проходящим вдоль второй оси X2.
Собирающий оптический блок 58 соединен с выступающей частью приводного вала 112 во внутреннем объеме 40 правой боковины 34 опоры 26.
Согласно варианту выполнения приводные средства 29 выполнены из двух двигателей или счетно-решающих устройств. Первый двигатель связан с приводным валом 112 и приспособлен к управлению вращением оптико-электронной головки 24. Второй двигатель приспособлен к управлению вращением оптико-электронного собирающего блока 58 и выполнен с возможностью воспроизведения команд первого двигателя. Такая конфигурация соответствует подстройке действий второго двигателя под действия первого двигателя.
Далее описана работа прицельного устройства 12.
Во время работы прицельное устройство 12 обладает несколькими функциями: с одной стороны, благодаря наличию оптико-электронной головки 24, прицельное устройство 12 обеспечивает возможность визуального наблюдения части оперативной обстановки посредством использования различных камер, приспособленных к созданию изображений в различных областях спектра благодаря наличию различных камер, например, в видимой области спектра, и в ИК области спектра (излучении, в котором длина волны составляет от 800 нанометров до 14 мкм). Камеры, в частности, обеспечивают возможность создания изображений в следующих доменах: NIR, SWIR, IR2 (длина волны от 3 мкм до 5 мкм) и IR3 (длина волны от 7,5 мкм до 14,0 мкм).
Когда оператор управляет вращением вокруг первой оси Y1 опоры 26, несущей оптико-электронную головку 24, опора поворачивается, и наблюдатель может обозревать другую часть оперативной обстановки.
В случае нарушения действия оптико-электронной головки 24, оператор может использовать прямой канал 28, например, через блок 62, пригодный для визуального наблюдения оперативной обстановки, например, через бинокль 102. Таким образом, оператор визуально наблюдает оперативную обстановку невооруженным глазом, и может продолжать его миссию.
В случае выхода из строя транспортного средства в текущий момент, опора 26 может, под управлением оператора, автоматически выставить сама себя в «нулевое положение относительно направления пеленга» (нулевое положение, выверенное через канал ствола орудия) и зафиксироваться благодаря использованию батареи резервного электропитания, а оператор может также использовать прямой канал 28 для обзора оперативной обстановки.
Согласно варианту выполнения опора 26 соединена с пушкой транспортного средства 10. В этом случае, во время выхода из строя транспортного средства в данный момент пушка транспортного средства 10 сообщает движение, используя механическое соединение, поворотной линзе 82 в отношении 1:2, a собирающему оптическому блоку 58 - в отношении 1:1. Этот привод посредством механического соединения выполняют для выставления относительного направления пеленга опоры 26 в «нулевое положение относительно направления пеленга», выверенное через канал ствола орудия.
Когда оператор управляет поворотом оптико-электронной головки вокруг второй оси X2, приводными средствами 29 приводят оптико-электронную головку 24 и собирающий оптический блок 58 так, что оптико-электронная головка 24 выполняет поворот на первый угол вокруг второй оси X2, при этом угол, соответствует команде оператора, и, таким образом, при выполнении оптико-электронной головкой 24 поворота, собирающий оптический блок 58 выполняет поворот на второй заданный угол вокруг второй оси X2, при этом соотношение между этими двумя углами составляет от 0,99 до 1.01, предпочтительно оно равно 1.
Во время вращения изображение, уловленное собирающим оптическим блоком 58, имеет переменную ориентацию. Когда изображение доходит до поворотной линзы 82, его переориентируют посредством поворотной линзы 82 так, чтобы собранное изображение доходило до предварительно заданных мест в одинаковой ориентации, несмотря на поворот собирающего оптического блока 58 и поворот опоры 26 вокруг первой оси Y1.
Оператор также обладает возможностью использования лазера 100 для определения того, расфокусирован ли, или даже разрушен нацеленный оптический блок.
В варианте выполнения на фиг. 5, прицельное устройство 12 может быть снабжено множеством датчиков, размещенных в зоне, расположенной во внутреннем пространстве 16, позади линзы 84, при этом луч является параллельным, оптическим, лазерным лучом.
Согласно примеру, представленному на фиг. 5, внутреннее пространство 16 распределено равномерно на три зоны: одна зона для лазерной системы 100; другая зона для первого датчика 101, а другая зона для второго датчика 114.
Конечно, может быть рассмотрена конфигурация с большим количеством блоков 62, в частности, с большим количеством датчиков.
Согласно другому примеру на фиг. 6, датчики и/или система 100 устранения расплывчатости изображения расположены во внешнем пространстве 18, вдоль стенки 14.
В этом примере сопрягающая часть 44 выполнена для обеспечения возможности для куба 98, расположенного во внешнем пространстве 18, для взаимодействия с системой 100 устранения расплывчатости изображения и с датчиком 101.
Этим обеспечивают возможность освобождения места во внутреннем пространстве 16 для размещения других массивных систем во внутреннем пространстве 16. Для сравнения, оборудование занимает меньший объем во внутреннем пространстве транспортного средства 10, чем так называемый прямой видоискатель с прямым оптическим каналом.
В другом варианте выполнения, только система 100 устранения расплывчатости изображения расположена с наружной стороны по отношению к внутреннему пространству 16 транспортного средства 10 для введения в прямой оптический канал 28.
Согласно варианту выполнения оптический канал 28 интегрирован в две боковины опоры 26.
Во всех рассмотренных выше вариантах выполнения оптический канал интегрирован в одну из боковин или в обе боковины опоры 26 прицельного устройства 12, что обеспечивает возможность получения луча внешнего визуального наблюдения, направленного на окуляры.
Такой оптический канал 28 для визуального наблюдения содержит поворотную линзу 82, посредством которой обеспечивается возможность поддержания ориентации изображения, полученного в предварительно заданных местах, независимо от ориентации собирающего оптического блока 58 и независимо от вращательного движения опоры 26 вокруг первой оси Y1.
Этим обеспечивают возможность поддержания неподвижных окуляров для визуального наблюдения изображения с постоянной ориентацией.
Применение такого оптического канала 28 обеспечивает возможность использования различных функций благодаря переключателю 88, взаимодействующему со множеством блоков 62, расположенных во внутреннем пространстве 16 транспортного средства. Этим обеспечивается возможность увеличения количества функций прицельного устройства 12 без нанесения ущерба стабильности прицельного устройства.
Применение такого оптического канала 28 обеспечивает возможность получения параллельного оптического луча, проходящего через броню. Этим обеспечивают возможность выставления прицельного устройства на различных высотах, сохраняя при этом собранное изображение, и также обеспечивают возможность использования мощных лазеров.
Такой оптический канал 28 для прямого визуального наблюдения, обладает физиологическими преимуществами для операторов и обеспечивают возможность разрешения любых неопределенностей, содержащихся в изображении, получаемом путем опосредованного обзора наружной стороны оперативной обстановки.
Такой оптический канал 28 для визуального наблюдения обеспечивает возможность добавления гиростабилизированной прямой функции обзора, которая не включает в себя прочный проем в броне (около 100 мм в диаметре). Этим обеспечивается возможность сохранения высокого уровня целостности транспортного средства 10 относительно внешних воздействий и гарантированно высокого контроля за герметичностью стенки 14.
Посредством такого оптического канала 28 для обзора обеспечивают возможность сохранения только одного идентичного прицельного устройства 12 для командира и оператора, только с регулированием оптической передачи к окулярам как функции места в танке.
Посредством такого оптического канала 28 для визуального наблюдения улучшается интеграция новых датчиков в оптико-электронной головке 24.
Посредством такого оптического канала 28 для обзора обеспечивают возможность разрешения нарушений действия прицельного устройства 12 в случае выхода из строя электрических средств или нарушения действия оптико-электронной головки 24 (резервный режим).
Кроме того, объем, расположенный во внутреннем пространстве 16, является минимальным, что обеспечивает возможность добавления, если требуется, посредством оператора, дополнительных функций, например, больших экранов.
Применение этого прицельного устройства 12 также обеспечивает возможность, без нарушения стабилизации обзора, добавления рассеивающих или разрушающих лазеров и/или других камер, располагаемых на стенке 14 или под стенкой 14.
Такое стабилизированное прицельное устройство 12 не содержит последующего укрытия и отверстия, связанного с укрытием, чем обеспечивается возможность снижения стоимости и объемности.
Изобретение охватывает все технически возможные сочетания вариантов осуществления, описанных выше.
Реферат
Изобретение относится к транспортному средству, в котором ограничено внутреннее пространство от наружного пространства, а также к транспортному средству, снабженному таким прицельным устройством. Заявленное прицельное устройство, расположенное на транспортном средстве, содержит опору (26), определяющую внутренний объем (30); оптико-электронную головку, приспособленную для вращения вокруг оси (X2); оптический канал (28), включающий в себя оптический блок (58) для сбора части окружающего наружного пространства (18), приспособленный для вращения вокруг оси (X2), и оптическую передающую систему (60), содержащую множество оптических компонентов, одна часть из которых расположена во внутреннем пространстве (16), а другая часть расположена во внутреннем объеме (30); приводные средства для приведения в движение оптико-электронной головки и собирающего оптического блока (58) так, чтобы угол поворота головки и угол поворота собирающего оптического блока (58) были по существу одинаковыми. Технический результат - обеспечение возможности оператору производить прямой обзор оперативной обстановки, окружающей транспортное средство, с одновременной стабилизацией и компактностью прицельного устройства. 2 н. и 7 з.п. ф-лы, 6 ил.
Комментарии