Система для приведения в движение посредством ускорения и управления направлением текучей среды - RU2203199C2
Код документа: RU2203199C2
Чертежи















Описание
Область техники
Изобретение относится к ускорению и управлению направлением текучей среды с использованием непрерывной динамической
поверхности, например высокоскоростного вращательного цилиндра или высокоскоростной подвижной ленты.
Предпосылки для создания изобретения
Самолеты, корабли, суда на воздушной
подушке и другие транспортные средства приводят в движение посредством ускорения текучей среды для создания тяги. Тяга обеспечивает усилие, которое приводит в движение транспортное средство в
направлении, противоположном направлению тяги. Обычные системы приведения в движение большей частью включают в себя воздушные или гребные винты, либо турбины.
Системы приведения в движение, содержащие воздушные или гребные винты, широко используются применительно к самолетам и кораблям. Однако винты относительно неэффективны из-за того, что значительное количество текучей среды направляется радиально наружу в сторону от желаемого направления тяги. Соответственно, винты вхолостую расходуют энергию на текучую среду, так что лишь незначительно увеличивают тяговую мощность. При работе в воде винты также подвергаются кавитации, которая значительно снижает их эффективность. Другая проблема, касающаяся винтов, заключается в том, что они создают опасность, приводя к серьезным ранениям и даже гибели людей или животных, которые соприкасаются с винтами во время их вращения. И, наконец, воздушные винты создают весьма сильный шум, что приводит к значительным неудобствам для населения вокруг аэропортов.
Для приведения в движение самолетов широко используют турбины. Однако турбины имеют ограниченное применение вследствие того, что они весьма дороги и создают сильный шум. Кроме того, турбины работают в случае текучих сред с высокой плотностью, например воды. В свете проблем, присущих винтам и турбинам, желательно разработать систему приведения в движение, которая эффективна, безопасна, бесшумна и может широко применяться для наземных, морских и воздушных транспортных средств.
Одной из альтернативных систем приведения в движение является вращающийся цилиндр. Предыдущие изобретения, касающиеся высокоскоростных вращающихся цилиндров, обычно сфокусированы на использовании цилиндров в потоке текучей среды для обеспечения подъема согласно эффекту Магнуса. Хотя такие виды применения скоростного вращающегося цилиндра и полезны для обеспечения подъема, они не относятся к использованию скоростного вращающегося цилиндра для создания силы тяги в статичной текучей среде.
До настоящего времени вращающиеся цилиндры не находили широкого применения в качестве систем приведения в движение посредством текучей среды. Когда цилиндр вращается в текучей среде, трение между цилиндром и текучей средой вызывает унос части текучей среды в слой вокруг цилиндра. Обычные системы приведения в движение, в которых используются вращающиеся цилиндры, не создают достаточную тягу без значительного увеличения физических размеров данного транспортного средства, например размаха крыла (у самолетов) или ширины (у судов или тележек). Таким образом до настоящего времени вращающиеся цилиндры практически не использовались на полногабаритных самолетах, кораблях, судах на воздушной подушке и других транспортных средствах.
Одна из систем приведения в движение, в которой используются вращающиеся цилиндры, показана в патенте США 2985406, выпущенном на имя H.W.Bump, который раскрывает два вращающихся цилиндра, действующих как средства приведения в движение и подъема самолета. Цилиндры расположены фактически параллельно друг другу и вращаются по направлению друг к другу, так что воздух течет вокруг цилиндров и сходится у задней части цилиндров. Воздух вначале уносится из пространства между цилиндрами и направляется вокруг внешней стороны цилиндров. При беспрепятственном уходе направление ускоренной текучей среды в пространстве между цилиндрами в общем было бы противоположно желаемому направлению максимальной тяги. Для надлежащего направления ускорения текучей среды Bump в задней части цилиндров располагает отражатель, который отделяет ускоренный воздух от цилиндров и отклоняет его на 90o для придания желаемого направления.
Система приведения в движение с вращательными цилиндрами обладает многими преимуществами по сравнению с винтами и турбинами. Во-первых, такие системы безопасны по сравнению с винтами, поскольку они не имеют лопастей и создают слой невязкого потока текучей среды вблизи цилиндра, который обычно предотвращает реальный контакт объекта с поверхностью цлининдра. Кроме того, вращательные цилиндры весьма малошумны и в равной степени применимы для работы в воздухе или воде. Поэтому было бы желательно разработать эффективную и гибкую систему приведения в движение, в которой используются быстро вращающиеся цилиндры, либо иной тип непрерывной динамической поверхности, например ленты, перемещающейся с высокой скоростью, для ускорения статичной текучей среды и придания ей направления.
Сущность изобретения
Система приведения в движение согласно изобретению представляет собой непрерывную динамическую поверхность для циркуляции сквозь текучую
среду от зоны ее забора к зоне создания тяги. Динамическая
поверхность ускоряет текучую среду приблизительно до ускорения поверхности, с тем чтобы создать слой ускоренной текучей среды от зоны забора
до зоны создания тяги. Для приведения динамической
поверхности в движение к ней оперативно подсоединен двигатель. Вблизи от динамической поверхности расположена сепараторная пластина. Сепараторная
пластина имеет переднюю кромку для отделения слоя
ускоренной текучей среды от динамической поверхности, и фактически плоскую напорную поверхность, примыкающую к передней кромке для подачи ускоренного
потока текучей среды в желаемом направлении.
Сепараторная пластина может быть расположена по отношению к динамической поверхности таким образом, что передняя кромка в общем находится в
непосредственной близости от динамической поверхности, а
напорная поверхность фактически тангенциальна к динамической поверхности по меньшей мере для части тяговой зоны.
В другом варианте осуществления конструкции система приведения в движение согласно изобретению содержит множество цилиндров. Каждый цилиндр имеет наружную поверхность, которая может вращаться сквозь текучую среду от зоны забора к тяговой зоне для создания слоя ускоренной текучей среды вокруг каждой наружной поверхности. Цилиндры отстоят друг от друга для образования заборной сходящейся зоны между цилиндрами, при этом цилиндры вращаются внутрь к сходящейся зоне, с тем чтобы ускоренная текучая среда от каждого цилиндра текла через зону схождения в желаемом направлении тяги. К цилиндрам оперативно прикреплен двигатель, с тем чтобы приводить цилиндры в движение с высокой скоростью. Вблизи от цилиндров расположено множество подвижных, обеспечивающих тягу сепараторных пластин, каждая из которых имеет переднюю кромку и напорную поверхность, при этом каждый цилиндр имеет по меньшей мере одну соответствующую сепараторную пластину, расположенную в его тяговой зоне. Каждая сепараторная пластина может быть расположена в сходящейся зоне и может перемещаться относительно соответствующего ей цилиндра.
Краткое описание чертежей
На фиг. 1 представлен
вид в поперечном сечении системы приведения в движение посредством
текучей среды с быстро вращающимся цилиндром, выполненный согласно изобретению.
На фиг. 2А представлен другой вид в поперечном сечении быстро вращающегося цилиндра системы приведения в движение посредством текучей среды согласно фиг. 1.
На фиг. 2В представлен еще один в поперечном сечении быстро вращающегося цилиндра системы приведения в движение согласно фиг. 1.
На фиг. 3А представлен вид в изометрии быстро вращающегося цилиндра системы приведения в движение посредством текучей среды, выполненной согласно изобретению и имеющей множество сепараторных пластин.
На фиг. 3В представлен вид в поперечном сечении системы приведения в движение согласно фиг. 3А.
На фиг. 4А представлен быстро вращающийся цилиндр системы приведения в движение посредством текучей среды, выполненной согласно изобретению и используемой совместно с плавучим средством для его движения вперед.
На фиг. 4В представлен быстро вращающийся цилиндр согласно фиг. 4А в случае нулевой тяги.
На фиг. 4С представлен быстро вращающийся цилиндр согласно фиг. 4А при обратном движении.
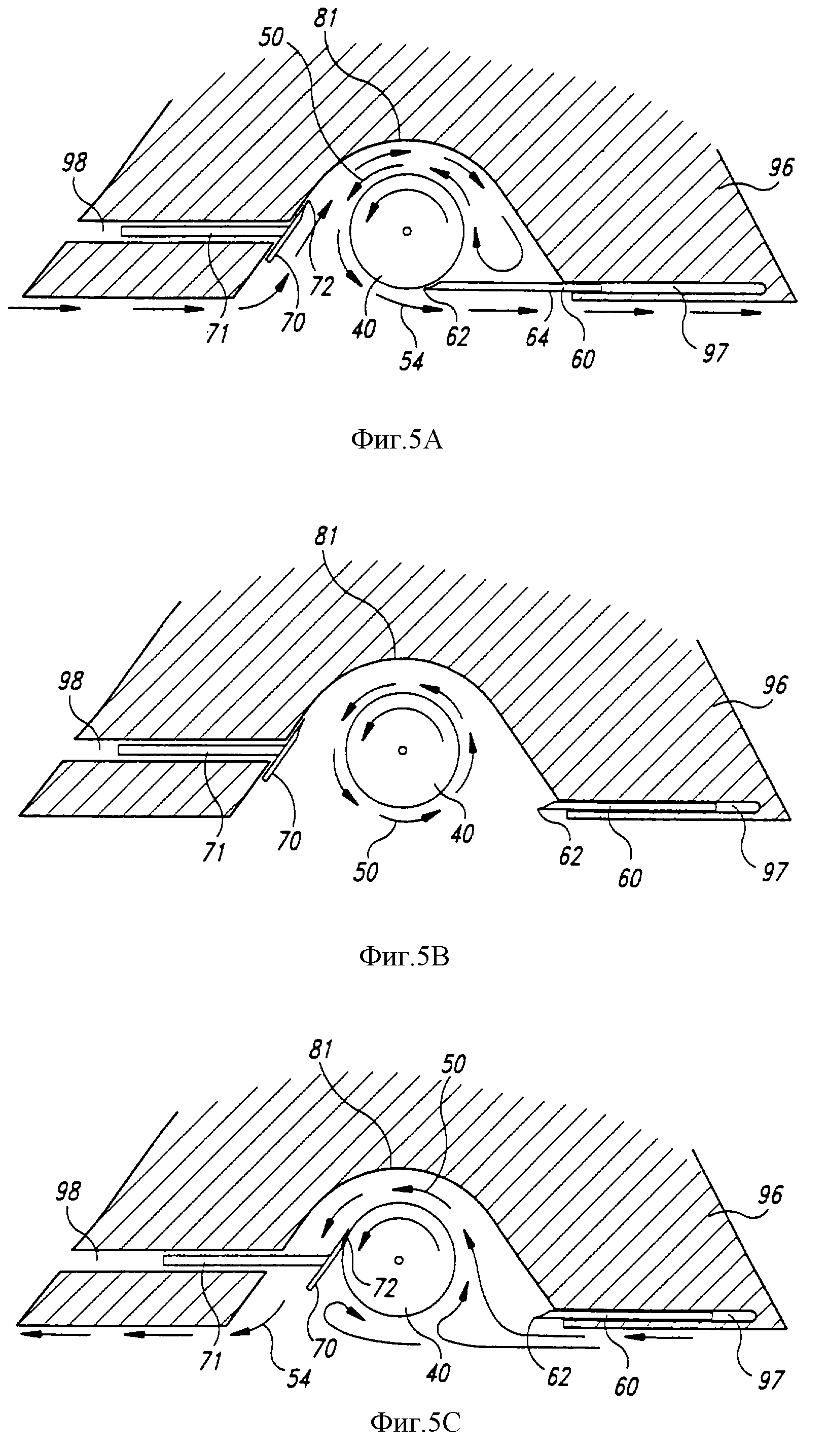
На фиг. 5А представлен подробный вид в поперечном сечении быстро вращающегося цилиндра согласно фиг. 4А.
На фиг. 5В представлен подробный вид в поперечном сечении быстро вращающегося цилиндра согласно фиг. 4В.
На фиг. 5С представлено поперечное сечение быстро вращающегося цилиндра согласно фиг. 4С.
На фиг. 6А схематически представлены вращающийся цилиндр и подвижная в продольном направлении сепараторная пластина системы приведения в движение посредством текучей среды, выполненной согласно изобретению.
На фиг. 6В представлены вращающийся цилиндр и подвижная в радиальном направлении сепараторная пластина системы приведения в движение посредством текучей среды, выполненной согласно изобретению.
На фиг. 6С схематически представлены вращающийся цилиндр и подвижная в тангенциальном направлении сепараторная пластина системы приведения в движение посредством текучей среды, выполненной согласно изобретению.
На фиг. 6D представлены вращающийся цилиндр и поворотно подвижная сепараторная пластина системы приведения в движение посредством текучей среды, выполненной согласно изобретению.
На фиг. 6Е схематически представлены вращающийся цилиндр и подвижная в угловом направлении сепараторная пластина системы приведения в движение посредством текучей среды, выполненная согласно изобретению.
На фиг. 7 представлен вид в поперечном сечении двухцилиндровой системы приведения в движение посредством текучей среды, выполненной согласно изобретению.
На фиг. 8 представлен вид сверху двухцилиндровой системы приведения в движение посредством текучей среды, выполненной согласно изобретению.
На фиг. 9А представлен вид в поперечном сечении двухцилиндровой системы приведения в движение посредством текучей среды, выполненной согласно изобретению, при движении вперед.
На фиг. 9В представлен вид в поперечном сечении двухцилиндровой системы приведения в движение посредством текучей среды, выполненной согласно изобретению, при обратном движении.
На фиг. 9С представлен вид в поперечном сечении двухцилиндровой системы приведения в движение посредством текучей среды, выполненной согласно изобретению, которая обеспечивает боковую тягу.
На фиг. 9D представлен вид в поперечном сечении двухцилиндровой системы приведения в движение посредством текучей среды, выполненной согласно изобретению, которая обеспечивает другую боковую тягу.
На фиг. 10 представлена двухцилиндровая система приведения в движение посредством текучей среды, выполненная согласно изобретению и используемая для приведения в движение плавучего средства.
На фиг. 11А представлен вид в изометрии многоцилиндровой системы приведения в движение посредством текучей среды, выполненной согласно изобретению.
На фиг. 11В представлен вид в изометрии другой многоцилиндровой системы приведения в движение, выполненной согласно изобретению.
На фиг. 12 представлен вид в поперечном сечении многоцилиндровой системы приведения в движение согласно фиг. 11А.
На фиг. 13 представлен вид сверху многоцилиндровой системы приведения в движение, выполненной согласно изобретению и используемой применительно к судну на воздушной подушке.
На фиг. 14 представлен вид в поперечном сечении многоцилиндровой системы приведения в движение, выполненной согласно изобретению и имеющей подвижные оси вращения.
На фиг. 15 представлен вид сверху многоцилиндровой системы приведения в движение, выполненной согласно изобретению и имеющей ребра.
На фиг. 16 представлен вид в поперечном сечении многоцилиндровой системы приведения в движение согласно фиг. 15.
На фиг. 17 представлен вид в поперечном сечении системы приведения в движение, выполненной согласно изобретению, в которой динамическая поверхность представляет собой подвижную ленту.
Подробное описание изобретения
На фиг. 1-17 представлены системы приведения в движение посредством
текучей среды, выполненные согласно изобретению и предназначенные для ускорения и
управления направлением текучей среды для создания тяги. Для ясности следует указать, что термин "тяга" в общем
используется для указания потока ускоренной текучей среды в данном направлении, а
термин "подъем" в общем используется для указания вертикально направленной тяги. На разных фиг. для обозначения
одинаковых деталей использованы одни и те же номера позиций.
На фиг. 1 представлен вид в поперечном сечении системы 10 приведения в движение посредством текучей среды, имеющей непрерывную динамическую поверхность, которая представляет собой быстро вращаемый цилиндр 40. Цилиндр имеет наружную поверхность 41 и установлен на вращающемся валу 42. Когда цилиндр 40 вращается, любая данная точка на наружной поверхности 41 непрерывно вращается сквозь текучую среду от зоны 44 ее забора до зоны 46 тяги. Фрикционная поверхность раздела между наружной поверхностью 41 и текучей средой F создает слой ускоренной текучей среды 50 от точки 52, расположенной в начале зоны 44 забора, до полосы 54 тяги, расположенной в конце зоны 46 тяги. Толщина слоя 50 растет радиально наружу от наружной поверхности 41, когда он продвигается через зоны 44 и 46 забора и тяги. В слое 50 имеет место градиент G скорости, так что текучая среда вблизи от наружной поверхности 41 перемещается быстрее, чем вдоль наружного края слоя 50 при том же самом радиальном положении по отношению к цилиндру 40.
Сепараторная пластина 60 располагается в зоне 46 тяги, чтобы отделить слой ускоренной текучей среды 50 от цилиндра 40 и придать ему желаемое направление. Сепараторная пластина 60 имеет переднюю кромку 62, которая расположена в непосредственной близости от наружной поверхности 41 цилиндра 40, и напорную поверхность 64, примыкающую к передней кромке 62. Напорная поверхность 64 предпочтительно выполнена плоской или фактически плоской и располагается таким образом, чтобы проходить фактически тангенциально к наружной поверхности 41. Посредством использования плоской или фактически плоской напорной поверхности 64, расположенной тангенциально к наружной поверхности 41, ускоренная текучая среда эффективно отделяется от наружной поверхности 41 с минимальной потерей энергии. Фактически плоская тангенциальная поверхность 64 уменьшает потери энергии при отделении ускоренной текучей среды от пограничного слоя по сравнению с лопастями, которые не являются ровными и не тангенциальны, поскольку напорная поверхность 64 лишь уменьшает энергию вращения текучей среды; неровные и не тангенциальные лопасти стремятся уменьшить как энергию вращения, так и линейную энергию текучей среды. Сепараторная пластина 60 также может иметь контурную поверхность 67 (показана пунктиром), находящуюся за напорной поверхностью 64. В предпочтительном варианте 64. В предпочтительном варианте осуществления конструкции криволинейная внутренняя поверхность 66, имеющая радиус, который фактически является таким же, что и радиус наружной поверхности 41, расположена с другой стороны пластины 60 вблизи от передней кромки.
Заборник 81 расположен вокруг части цилиндра 40, чтобы направить большую часть текучей среды для контакта с цилиндром, а также предотвратить обволакивание ускоренной текучей среды вокруг сепараторной пластины 60 и ее возврат к заборной зоне 44. В одном из вариантов осуществления конструкции заборник 81 выполнен в виде криволинейного листа 80, который подсоединен к дальнему концу сепараторной пластины 60 и проходит вокруг части цилиндра 40. В другом варианте осуществления конструкции заборник 81 имеет большое количество частей, включающих в себя криволинейный лист 80 и наружный лист 82 с внешней стороны криволинейного листа 80. Криволинейный лист 80 и наружный лист 82 перекрывают друг друга вдоль зоны 84, в целом проходящей параллельно оси вращения цилиндра 40. Направляющие 86 расположены на смежных концах криволинейного листа 80 и наружного листа 82 для направления криволинейного листа 80 под наружный лист 82, когда криволинейный лист 80 перемещается вокруг цилиндра 40, как показано стрелкой А.
Заборник 81 значительно увеличивает тяговую мощность вращающегося цилиндра 40. Тяга, создаваемая вращающихся цилиндром 40, заставляет транспортное средство, к которому он подсоединен, перемещаться через текучую среду. При перемещении транспортное средство создает поток текучей среды по цилиндру 40. Соответственно, создается эффект Магнуса по цилиндру 40, при этом у передней кромки 62 обеспечивается зона низкого давления, а вблизи от наружной поверхности 41 в зоне 44 забора обеспечивается зона высокого давления. Заборник 81 имеет высокое давление у цилиндра 40, что вызывает большее трение между наружной поверхностью 41 и текучей средой. Поэтому слой ускоренной текучей среды 50 растет быстрее и становится больше, чем при отсутствии заборника 81.
При работе наружная поверхность 41 предпочтительно перемещается с чрезвычайно высокой скоростью. В зависимости от радиуса цилиндра 40 и типа текучей среды цилиндр 40 обычно вращается со скоростью, составляющей приблизительно 500-12000 об/мин в воде или приблизительно 18000-100000 об/мин в воздухе. Объем изобретения не ограничен вышеуказанными скоростями вращения, поэтому могут быть использованы другие скорости вращения. Например, при использовании в воде скорость наружной поверхности 41 обычно составляет несколько сотен футов в секунду [например, 471,24 фута/сек (143,6 м/сек) для цилиндра, имеющего радиус величиной в 6 дюймов (152,4 см) и вращающегося со скоростью 9000 об/мин]. Трение между текучей средой и наружной поверхностью 41 цилиндра 40 вызывает рост слоя 50 в зоне забора 44 с высокой скоростью. Как показано стрелкой F в отношении потока текучей среды, заборник 81 усиливает рост пограничного слоя 50 по всей зоне 44 забора, в то время как дополнительная текучая среда все еще уносится к слою 50 в зоне тяги. Скорость слоя 50 является функцией скорости наружной поверхности 41 цилиндра и вязкости текучей среды. Транспортное средство приводят в движение с желаемой скоростью и в желаемом направлении посредством изменения скорости цилиндра 40 и тангенциального положения напорной поверхности 64 вокруг наружной поверхности 41.
На фиг. 2А и 2В представлено управление направлением ускоренной текучей среды посредством использование одного вращающегося цилиндра 40. Как показано на фиг. 2А, сепараторная пластина 60 повернута радиально вокруг цилиндра 40, с тем, чтобы придавать тяге 54 направление по поверхности 64 к правой стороне цилиндра. На фиг. 2В представлена сепараторная пластина 60, расположенная радиально вокруг цилиндра 40, так что тяга 54 направлена к левой стороне цилиндра.
Положение сепараторной пластины 60 по отношению к цилиндру 40 также влияет на размер и местоположение зоны 44 забора и тяговой зоны 46. Зона забора 44 начинается справа от цилиндра 40, когда создается правосторонняя тяга, как показано на фиг. 2А. В случае направления тяги влево от цилиндра 40, как показано на фиг. 2В, зона 44 забора начинается с левой стороны от цилиндра 40.
На фиг. 3А и 3В представлен вращающийся цилиндр 40, в котором сепараторная пластина разделена на первую часть 60а, имеющую переднюю кромку 62а, и вторую часть 60b, имеющую переднюю кромку 62b. Первая и вторая части 60а и 60b разделены вдоль границы, которая фактически перпендикулярна наружной поверхности 41. Первая и вторая части 60а и 60b также независимо располагаются вокруг наружной поверхности 41. Первая часть 60а отделяет ускоренную текучую среду в слое 50а от цилиндра 40 и направляет ее по напорной поверхности 64а, в то время как вторая часть 60b ответвляет ускоренную текучую среду ко второму слою 50b и направляет ее по напорной поверхности 64b. В предпочтительном варианте осуществления конструкции первая часть 60а имеет первый криволинейный лист 80а, прикрепленный к концу ее напорной поверхности 64а, а вторая часть 60b имеет второй криволинейный лист 80b, прикрепленный к концу ее напорной поверхности 64b. В первой и второй частях 60а и 60b криволинейные листы 80а и 80b независимо расположены вокруг цилиндра 40. Один наружный лист 82 располагается с наружной стороны криволинейных листов 80а и 80b. Предпочтительно, чтобы наружный лист 82 проходил фактически по всей длине цилиндра 40. Посредством обеспечения независимо располагаемых частей 60а и 60b ускоренная текучая среда может быть разделена таким образом, что тяга 54а будет направлена влево от цилиндра 40, в то время как тяга 54b будет направлена вправо от цилиндра 40, как показано на фиг. 3А. Напротив, первая и вторая части 60а и 60b могут вращаться вокруг цилиндра 40 так, что тяга 54а будет направлена вправо от цилиндра, в то время как тяга 54b будет направлена влево, как показано на фиг. 3В. Сепараторные пластины с множеством частей вокруг одного вращающегося цилиндра обеспечивают повышенный контроль за направлением транспортного средства.
На фиг. 4А-4С представлено применение одного быстро вращаемого цилиндра 40 на плавучем судне 90 с донной частью 92, которая проходит между носовой частью 94 и кормой 96. В одном из вариантов осуществления конструкции быстро вращающийся цилиндр 40 установлен горизонтально по ширине судна 90, при этом заборник 81 образован в донной части 92. Вращающийся цилиндр 40 предпочтительно располагается таким образом, что самая нижняя поверхность фактически находится на одном уровне с плоскостью, образованной донной частью 92 у кормы 96. Сепараторная пластина 60 частично расположена в кармане 97, находящемся в донной части 92 у кормы 96. Сепараторная пластина 60 имеет возможность возвратно-поступательного движения между положением зацепления или положением отделения, в котором ее передняя кромка 62 находится в непосредствоенной близости от цилиндра 40, и отведенным положением, в котором она заходит в карман 97. В предпочтительном варианте осуществления конструкции сепараторная пластина 60 перемещается фактически параллельно днищу 92 и тангенциально к нижней части вращающегося цилиндра 40. Реверсивная пластина 70 расположена на передней стороне вращающегося цилиндра 40 и под углом вверх к транцу судна. Реверсивная пластина 70 соединена с возвратно-поступательным штоком 71, который установлен через отверстие 98 для возвратно-поступательного движения между положением зацепления и отведенным положением.
На фиг. 4А и 5А представлена система приведения в движение с одним цилиндром при движении вперед. Чтобы создать тягу для движения вперед сепараторная пластина 60 располагается в ее положении зацепления, а реверсивная пластина 70 располагается в ее отведенном положении у передней части заборника 81. Когда цилиндр 40 вращается, текучая среда в заборной зоне ускоряется и направляется назад к сепараторной пластине, что обсуждалось выше применительно к фиг. 1. Когда ускоренная текучая среда 50 приближается к самой нижней части вращающегося цилиндра 40, передняя кромка 62 отделяет тяговый поток 54 от цилиндра 40 и напорная поверхность 64 направляет тяговый поток 54 по вектору, который фактически параллелен днищу 92.
На фиг. 4В и 5В представлена система приведения в движение с одним цилиндром при нейтральной передаче. Как сепараторная пластина 60, так и реверсивная пластина 70 находятся в отведенном положении. Сепараторная пластина 60 может быть отведена либо частично, как показано на фиг. 4В, либо полностью, как показано на фиг. 5В. Никакой тяги не создается, когда обе пластины находятся в их отведенном положении, поскольку не происходит отделение ускоренной текучей среды от цилиндра 40. Соответственно, силы ускоренной текучей среды вокруг цилиндра 40 аннулируют друг друга, эффективно приводя к нулевой тяге.
На фиг. 4С и 5С представлена система приведения в движение с одним цилиндром в случае обратной передачи. Сепараторная пластина 60 отведена в карман 97, а реверсивная пластина 70 в положение зацепления, так что ее передняя кромка 72 располагается вблизи от передней стороны вращающегося цилиндра 40. Когда цилиндр 40 вращается, текучая среда уносится к заборнику на кормовой стороне цилиндра 40 и направляется под углом вниз к носу 94 посредством напорной поверхности 74.
В другом варианте осуществления конструкции (не показан) горизонтальный вращающийся цилиндр 40, изображенный на фиг. 4А-4С и 5А-5С имеет многосекционную сепараторную пластину и многосекционную реверсивную пластину. Сочетание многосекционных сепараторной и реверсивной пластин разделяет поток текучей среды вокруг цилиндра так, что имитирует обычную систему приведения в движение с двумя гребными винтами. Например, левый поворот может быть осуществлен посредством установки левых сепараторной и реверсивной пластин в положение обратной передачи, а правых сепараторной и реверсивной пластин в положение передней передачи. Напротив, правый поворот может быть осуществлен посредством установки левых сепараторной и реверсивной пластин в положение передней передачи, а правых сепараторной и реверсивной пластин в положение обратной передачи.
На фиг. 6А-6Е схематически представлено возможное расположение сепараторной пластины 60 вокруг цилиндра 40. На фиг. 6А сепараторная пластина 60 расположена по длине цилиндра 40 в продольном направлении фактически параллельно валу 42. Посредством регулирования продольного положения сепараторной пластины 60 по отношению к цилиндру 40 ускоренная текучая среда может быть избирательно отделена от вращающегося цилиндра 40, с тем, чтобы создать силовой момент М1 (сепараторная пластина 60 расположена слева от центра) или М2 (сепараторная пластина 60 расположена справа от центра). Если обратиться к фиг. 6В, то сепараторная пластина 60 расположена радиально наружу от наружной поверхности 41 и фактически перпендикулярно ей. Радиальное расположение сепараторной пластины 60 позволяет регулировать количество ускоренной текучей среды, которая отделяется от цилиндра 40. Сепараторная пластина 60 может быть расположена достаточно радиально наружу от цилиндра 40, так что она высвобождает слой ускоренной текучей среды для предотвращения создания какой-либо тяги. Согласно фиг. 6С сепараторная пластина может быть расположена по касательной к наружной поверхности 41. Как и в случае радиального расположения, показанного на фиг. 6В, тангенциальное расположение сепараторной пластины уменьшает количество ускоренной текучей среды, которая отделяется от цилиндра 40. На фиг. 6D представлено вращательное расположение сепараторной пластины 60 вокруг цилиндра 40, что обсуждалось применительно к фигурам 2А и 2В. На фиг. 6Е передняя кромка 62 сепараторной пластины 60 может регулироваться по углу относительно цилиндра 40. Первый конец 61 передней кромки 62 располагается в стороне от наружной поверхности 41, в то время как второй конец 63 передней кромки 62 находится вблизи от наружной поверхности 41. Посредством углового регулирования передней кромки 62 относительно цилиндра 40 могут быть обеспечены незначительные изменения силы инерции и направления тяги, с тем, чтобы выравнивать транспортное средство на ходу или отрегулировать его скорость.
На фиг. 7-14 изображен другой вариант осуществления изобретения, в котором система приведения в движение согласно изобретению включает в себя множество вращательных цилиндров для обеспечения увеличенного вектора тяги, либо большое количество векторов тяги. Если обратиться к фиг. 1, то система 100 приведения в движение включает в себя первый вращающийся цилиндр 40 и второй вращающийся цилиндр 140. Сепараторная пластина 60 и криволинейный лист 80 оперативно расположены вокруг первого цилиндра 40, что обсуждалось выше применительно к фигурам 1-6. Сепараторная пластина 160 и криволинейный лист 180 подобным же образом расположены вокруг второго вращающегося цилиндра 140. В предпочтительном варианте осуществления конструкции вторая сепараторная пластина 160 имеет переднюю кромку 162, расположенную в непосредственной близости от наружной поверхности 141 второго вращающегося цилиндра 140, и фактически плоскую напорную поверхность 164 вблизи от передней кромки 162. Напорная поверхность 164 предпочтительно проходит фактически тангенциально к наружной поверхности 141, при этом она имеет возможность вращения вокруг наружной поверхности 141, так что она остается в фактически тангенциальной взаимосвязи с наружной поверхностью 141 во всем своем диапазоне движения. Первый и второй цилиндры 40 и 140 располагаются таким образом, что отстоят друг от друга, так что сепараторные пластины 60 и 160 находятся вблизи друг от друга по сходящейся зоне 148 забора. В предпочтительном варианте осуществления конструкции цилиндра 40 и 140 выполнены в виде противоположной пары, в которой приводные валы 42 и 142 фактически параллельны друг другу. Следовательно, сепараторные пластины 60 и 160 расположены противоположно и фактически параллельно друг другу по сходящейся зоне 148.
При работе первый цилиндр 40 уносит текучую среду от точки 52 к слою ускоренной текучей среды 50, который проходит через напорную поверхность 64 в желаемом направлении в качестве тяги 54. Второй цилиндр 141 подобным же образом переносит текучую среду от точки 152 к слою ускоренной текучей среды 150, который проходит через напорную поверхность 164 в желаемом направлении в качестве тяги 154. Когда слои ускоренной текучей среды 50 и 150 сходятся в зоне 148 схождения, они стремятся унести к тяге большее количество текучей среды по сравнению с обычными вращательными цилиндрами, что приводит к увеличенной тяге 158. Увеличенная тяга 158 имеет значительно большую силу инерции, чем сумма одиночных тяг 54 и 154 без приращения. Сила инерции увеличенной тяги 158 зависит от размера зоны 148 схождения и от относительного положения приводных валов 42 и 142. Можно оценить, что приращение отдельных тяг 54 и 154 уменьшается, если зона схождения чрезмерно мала, или если валы 42 и 142 располагаются в разных горизонтальных плоскостях. Соответственно, в тех случаях применения, при которых требуется максимальное увеличение тяги, желательно оптимизировать размер зоны 148 схождения по отношению к радиусу вращающихся цилиндров 40 и положению валов 42 и 142 в общей плоскости.
Направление вращения цилиндров представляет собой важный аспект многоцилиндровых вариантов осуществления изобретения. Чтобы создать максимальную тягу для приведения транспортного средства в движение в направлении V, первый цилиндр 40 вращается по часовой стрелке, а второй цилиндр 140 против часовой стрелки к зоне 148 схождения. Таким образом слои ускоренной текучей среды 50 и 150 проходят с внешней стороны цилиндров через зону схождения 148 между цилиндрами и по напорным сепараторным пластинам 60 и 160. За счет вращения цилиндров 40 и 140 таким образом, что слои ускоренной текучей среды 50 и 150 проходят через зону 148 схождения между цилиндрами, поток увеличивается, что обсуждалось выше, при этом отсутствуют потери энергии на дефлекторных пластинах, которые более чем тангенциально направляют поток с цилиндров.
На фиг. 8 представлено соединение приводного двигателя 20 и поворотного штока 181 с системой 100 приведения в движение, имеющей два вращающихся цилиндра 40 и 140. Приводная система включает в себя первый шкив 21, второй шкив 23 и третий шкив 26. Первый шкив 21 прикреплен к приводному валу двигателя 20, а второй и третий шкивы 23 и 26 установлены так, чтобы отделять вращательные валы. Второй шкив 23 имеет зубчатое колесо 24, входящее в зацепление с зубчатым колесом 25, прикрепленным к третьему шкиву 26. Зубчатое колесо 24 входит в зацепление с зубчатым колесом 25, так что вращение второго шкива 23 в одном направлении обеспечивает вращение третьего шкива 26 в противоположном направлении. Четвертый шкив 29 прикреплен к валу 42 первого цилиндра 40, а пятый шкив 30 прикреплен к валу 142 второго цилиндра 140. Первый приводной ремень 22 расположен между первым шкивом 21 и вторым шкивом 23, второй приводной ремень 27 расположен между третьим шкивом 26 и четвертым шкивом 29, а третий приводной ремень 28 расположен между вторым шкивом 23 и пятым шкивом 30. При работе двигатель 20 вращает первый шкив 21 для приведения в движение первого ремня 22 и второго шкива 23. Второй шкив 23 приводит в движение как третий ремень 28, так и третий шкив 26. Второй ремень 27 и третий ремень 28 приводят в движение цилиндры соответственно 40 и 140.
Поворотный механизм включает в себя кронштейн 85, шарнирно соединенный с валом 42 и жестко соединенный с криволинейным листом 80 в противоположных точках 87 и 89. Подобным же образом кронштейн 185 прикреплен к валу 142 и жестко прикреплен к криволинейному листу 180 в точках 187 и 189. Шток 181 шарнирно прикреплен к концам кронштейнов 85 и 185 посредством пальцев соответственно 83 и 183. При работе осевое движение штока 181 вызывает поворот кронштейнов 85 и 185 вокруг валов 42 и 142. Когда кронштейны 85 и 185 поворачиваются вокруг соответствующих им валов, сепараторные пластины 60 и 160, и криволинейные листы 80 и 180 поворачиваются вокруг цилиндров 40 и 140 для обеспечения желаемого направления тяги.
На фиг. 9А-9D представлен другой вариант осуществления изобретения, при котором два вращательных цилиндра 40 и 140 имеют независимо управляемые сепараторные пластины и заборники. На фиг. 9А сепараторные пластины 60 и 160 расположены в зоне 148 схождения, что обсуждалось выше применительно к фиг. 7, для создания максимальной тяги в переднем направлении. На фиг. 9В представлены сепараторные пластины 60 и 160, расположенные на противоположных сторонах цилиндров 40 и 140 снаружи зоны 148 схождения для создания отдельных тяг 54 и 154 в обратном направлении. Обратные тяги 54 и 154 не увеличены, как показано на фиг. 9А, поскольку не происходит объединение тяг в зоне 148 схождения для увеличения уноса статичной текучей среды в слой ускоренной текучей среды. На фиг. 9С представлены сепараторные пластины 60 и 160, расположенные вокруг соответствующих цилиндров для создания боковой тяги в одном направлении, а на фиг. 9D представлены сепараторные пластины 60 и 160, расположенные так, чтобы создать боковую тягу в противоположном направлении.
На фиг. 10 представлен боковой вид, иллюстрирующий применение двух двухцилиндровых систем 100 приведения в движение, прикрепленных к днищу 192 буксирного судна 190. Системы приведения в движение прикреплены к буксирному судну таким образом, что их оси вращения проходят вертикально вниз от днища 192. Для создания максимальной передней тяги сепараторные пластины цилиндров расположены так, как показано на фиг. 9а, с тем чтобы приводить буксир в движение в переднем направлении с максимальной силой.
На фиг. 11А представлена система 200 приведения в движение посредством текучей среды, имеющая четыре цилиндра 40, 140, 240 и 340. Цилиндры расположены торец к торцу и фактически перпендикулярны смежным с ними цилиндрами для формирования зоны 248 схождения, имеющей прямолинейную форму. Как и в случае двухцилиндровой системы 100 приведения в движение, направление вращения цилиндров представляет собой важный аспект изобретения. Для получения максимального приращения потока текучей среды цилиндры вращаются к зоне 248 схождения, так что ускоренная текучая среда проходит через зону 248 схождения между цилиндрами, а затем выходит из зоны схождения в желаемом направлении максимальной тяги.
Каждый цилиндр имеет по меньшей мере одну соответствующую сепараторную пластину, расположенную в зоне тяги. В одном из вариантов осуществления конструкции цилиндр 40 имеет две сепараторные пластины 60, цилиндр 140 имеет две сепараторные пластины 160, цилиндр 240 имеет сепараторные пластины 260 и цилиндр 340 имеет сепараторные пластины 360. Каждая сепараторная пластина может быть расположена относительно соответствующего ей цилиндра таким образом, что отдельные векторы тяги, взаимосвязанные с каждым цилиндром, можно регулировать по отдельности. Как показано на фиг. 11А, векторы тяги 54, 154, 254 и 354 могут быть отделены от соответствующих им цилиндров и направлены вниз и наружу от зоны 248 схождения. Направленные тяги 54, 154, 254 и 354 рассеивают общую тягу по большей площади, обеспечивая большую возможность управления маневрами, связанными с приземлением, и уменьшение концентрации скошенного вниз потока. На фиг. 11В векторы тяги 54, 154, 254 и 354 направлены внутрь, тем самым фокусируя силы тяги для увеличения объема текучей среды, которая уносится в слои ускоренной текучей среды. В эксплуатации для подъема и продвижения такого транспортного средства, как самолет или судно на воздушной подушке, может быть использована многоцилиндровая конфигурация, показанная на фиг. 11.
На фиг. 12 представлен вид в поперечном сечении четырехцилиндровой системы 200 приведения в движение. Для обеспечения максимального подъема напорные поверхности 60, 160, 260 и 360 располагаются так, чтобы направить тягу 54, 154, 254 и 354 вертикально вниз и тангенциально к самой внутренней поверхности цилиндров в зоне 248 схождения. Для создания боковой тяги в сочетании с вертикальной тягой одна или более сепараторные пластины вращаются вокруг соответствующих им центров, чтобы направить силы тяги вбок под соответствующим углом, с тем чтобы обеспечить желаемую боковую тягу.
Система 200 приведения в движение обеспечивает как подъемную, так и боковую тягу посредством сочетания трех или более вращательных цилиндров, причем с такой конфигурацией, при которой по меньшей мере два цилиндра в целом располагаются противоположно друг другу. При обеспечении трех или более цилиндров по меньшей мере два цилиндра могут быть предназначены для создания подъемной тяги, в то время как по меньшей мере один из цилиндров может создавать боковую тягу. В одном из вариантов осуществления конструкции цилиндрам придана конфигурация в виде противоположных пар, при этом цилиндры каждой пары фактически параллельны друг другу. В таком варианте осуществления конструкции количество цилиндров может составлять, не ограничиваясь этим количеством, порядка четырех при прямоугольной конфигурации, шесть цилиндров при шестиугольной конфигурации или восемь цилиндров при восьмиугольной конфигурации.
В другом варианте осуществления конструкции система 200 приведения в движение может включать в себя три цилиндра в U-образной или треугольной конфигурации, пять цилиндров в пятиугольной конфигурации, либо какое-то иное количество цилиндров при соответствующей конфигурации.
Гироскопический эффект и характеристики кренения могут быть сообщены транспортному средству путем индивидуального изменения скорости цилиндров 40, 140, 240 и 340. Левый поворот при кренении влево может быть осуществлен посредством уменьшения скорости цилиндра 40 и/или увеличения скорости цилиндра 240. Напротив, правый поворот с кренением вправо может быть осуществлен посредством увеличения скорости цилиндра 40 и/или уменьшения скорости цилиндра 240.
Система 200 приведения в движение также обеспечивает исключительную величину подъема при относительно небольшой площади, при этом цилиндры легко удерживаются транспортным средством. На фиг. 13 показана система 200 приведения в движение, используемая в судне на воздушной подушке или на самолете 290. В отличие от обычных вращательных крыльев, выполненных из длинных цилиндров, установленных на консоли, в системе 200 приведения в движение в качестве цилиндров используется определенное количество более коротких цилиндров, которые могут быть установлены по обоим концам. Посредством использования определенного количества коротких цилиндров система 200 приведения в движение может иметь ту же самую общую длину цилиндров в гораздо меньшем физическом пространстве. Кроме того, цилиндры в системе 200 приведения в движение не требуют дорогостоящих и сложных конструктивных опор, как в случае цилиндров, устанавливаемых на консоли.
На фиг. 14 представлен другой вариант осуществления многоцилиндровой системы 300 приведения в движение, в случае которой поворотные оси цилиндров могут перемещаться, с тем чтобы создать систему приведения в движение, предназначенную для обеспечения увеличенной боковой тяги и повышенной боковой скорости. Первый цилиндр 40 может быть приподнят, так что его ось вращения 42 располагается выше своего нормального положения (показано пунктиром). Подобным же образом третий цилиндр 240 может быть расположен так, что его ось вращения 242 находится ниже своего нормального положения (показано пунктиром). Посредством перемещения осей вращения тяги 54 и 254 могут быть направлены вбок без помех уносу текучей среды для цилиндров 140 и 340.
На фиг. 15 показан другой вариант осуществления многоцилиндровой системы 200 приведения в движение, имеющей большое количество дискообразных ребер 68, прикрепленных к наружной поверхности цилиндра 40. Подобным же образом ребра 168, 268 и 368 крепятся к наружной поверхности цилиндров соответственно 140, 240 и 340. Ребра располагаются перпендикулярно наружной поверхности цилиндров и параллельно потоку текучей среды. Ребра увеличивают площадь поверхности, которая вступает во фрикционный контакт с текучей средой, тем самым обеспечивая перенос большего количества текучей среды в слой ускоренной текучей среды и увеличение скорости текучей среды в таких слоях. Как наилучшим образом показано на фиг. 15, сепараторная пластина 60 имеет большое количество пальцев 65, расположенных в пространстве между каждым из ребер 68. Пальцы сепараторных пластин отделяют ускоренную текучую среду как от наружной поверхности цилиндров, так и от поверхности пальцев, и направляют ее вдоль напорных поверхностей сепараторных пластин, что обсуждалось выше.
Изобретение предполагает использование любого типа непрерывной динамической поверхности и не ограничено вращающимися цилиндрами. На фиг. 17 представлен другой вид непрерывной динамической поверхности, которая представляет собой ленту 40', обвивающую по меньшей мере два цилиндра. Ленту приводят в движение со значительной линейной скоростью посредством по меньшей мере одного из цилиндров, при этом часть ленты циркулирует через текучую среду. Сепараторная пластина 60 расположена у одного из цилиндров, там где ускоренная текучая среда должна быть отделена от ленты. Сепараторная пластина 60 может быть расположена фактически тангенциально к поверхности ленты для направления тяги 54 продольно от ленты, либо может быть расположена под углом (показано пунктиром) для направления тяги в боковую сторону от ленты. Тип непрерывной динамической поверхности (например, вращающийся цилиндр или быстродвижущаяся лента) в общем не оказывает влияния на принципы и варианты осуществления конструкции, которые здесь раскрыты. Таким образом, изобретение не должно ограничиваться вращающимися цилиндрами.
Настоящее изобретение обеспечивает некоторые преимущества по сравнению с обычными системами приведения в движение, имеющими динамические поверхности. Во-первых, посредством отделения ускоренной текучей среды от динамической поверхности вдоль вектора, который тангенциален к поверхности, только энергия вращения ускоренной текучей среды теряется на сепараторных пластинах. Кроме того, ввиду наличия фактически плоской напорной поверхности, которая находится вблизи от передней кромки, изобретение дополнительно сводит к минимуму потери энергии, которые в ином случае имели бы место, когда ускоренная текучая среда отделяется от динамической поверхности. Во-вторых, в случае двух или более вращающихся цилиндров, цилиндры располагаются так, чтобы создать зону схождения, которая усиливает тягу в желаемом направлении посредством вращения цилиндров внутрь к зоне схождения, так что тяга будет беспрепятственно передаваться между цилиндрами в желаемом направлении. В- третьих, в изобретении используются три или более вращающихся цилиндра как для обеспечения тяги для подъема, так и для движения вперед.
Также очевидно и то, что хотя в иллюстративных целях здесь раскрыты лишь определенные варианты, без отклонения от существа и объема изобретения могут быть выполнены его модификации.
Реферат
Изобретение относится к ускорению и управлению направлением текучей среды с использованием непрерывной динамической поверхности. Система для приведения в движение посредством ускорения и управления направлением текучей среды, имеющая непрерывную динамическую поверхность для циркуляции через текучую среду от заборной зоны, где текучую среду подводят к динамической поверхности, к зоне тяги, где текучую среду отводят от динамической поверхности. Динамическая поверхность ускоряет текучую среду приблизительно до ускорения поверхности, чтобы создать слой ускоренной текучей среды от зоны забора через зону тяги. Для приведения динамической поверхности в движение к этой поверхности оперативно подсоединен двигатель. Вблизи от динамической поверхности расположена сепараторная пластина. Сепараторная пластина имеет переднюю кромку для отделения слоя ускоренной текучей среды от динамической поверхности и фактически плоскую напорную поверхность, примыкающую к передней кромке для направления ускоренной текучей среды в желаемом направлении. Сепараторная пластина может быть расположена по отношению к динамической поверхности таким образом, что кромка будет находиться в непосредственной близости от динамической поверхности, а напорная поверхность будет фактически тангенциальна к динамической поверхности по меньшей мере для части зоны тяги. Достигается безопасность и малошумность системы для приведения в движение морских и воздушных судов и других транспортных средств. 2 с. и 24 з.п.ф-лы, 17 ил.

Комментарии