Система позиционирования пациента для систем радиационной терапии - RU2342172C2
Код документа: RU2342172C2
Чертежи


















Описание
Родственные заявки
Данная заявка испрашивает приоритет согласно предварительным заявкам США №60/494 699 (подана 12 августа 2003 г.) и 60/579095 (подана 10 июня 2004). Обе заявки называются «Точное расположение пациента и система лучевой терапии», и их содержание целиком включено в данный документ посредством ссылки на них.
Уровень техники
Настоящее изобретение относится к системам лучевой терапии и в частности к системе позиционирования и корректировки положения пациента, некоторые варианты выполнения которой включают систему измерения параметров внешней среды и обратную связь по положению. Варианты выполнения настоящего изобретения обеспечивают повышенную точность регистрации и позиционирования пациента. Кроме того, в некоторых вариантах компенсируется рассогласование, вызванное такими факторами, как допуски, связанные с механическим перемещением частей и с тем, что конструкции не являются абсолютно жесткими. Дополнительные варианты выполнения изобретения обеспечивают возможность активного планирования траектории и предотвращения столкновений, обеспечивая эффективное перемещение и повышенную безопасность.
Описание уровня техники
Известные системы лучевой терапии применяют для лечения пациентов, находящихся в различных состояниях. Лучевую терапию обычно используют для уничтожения или подавления роста паразитной ткани, например, раковой опухоли. Определенное количество макроэнергетического электромагнитного излучения и/или макроэнергетических быстрых частиц направляют в паразитную ткань для ее повреждения и уменьшения при этом ненамеренного повреждения необходимой или здоровой ткани, через которую проходит излучение на пути к пораженной ткани.
Протонная терапия появилась как очень действенная терапия, применяемая при различных состояниях. В протонной терапии положительно заряженные субатомные протонные частицы ускоряют, сводят в точно сфокусированный пучок и направляют к заданной области-мишени пациента. Протоны обнаруживают меньшее боковое рассеивание после столкновения с тканью пациента, чем электромагнитное излучение или заряженные частицы электронов низкой массы, и, соответственно, предоставляют возможность более точного направления и подачи пучка вдоль оси. Также после столкновения протонов с тканью пациента проявляется характерный пик Брегга, в котором значительная часть кинетической энергии ускоренной массы располагается в относительно ограниченном районе глубины проникновения в ткань пациента. Таким образом, обеспечивается значительное преимущество уменьшения количества энергии, доставляемой ускоренными протонными частицами к здоровым тканям, расположенным между областями-мишенями и излучающей насадкой установки протонной терапии, а также ткани, лежащей позади заданной области-мишени, в направлении от места облучения. В зависимости от показаний для конкретного пациента и его состояния возможно осуществлять доставку терапевтического пучка протонов различными терапевтическими дозами в многочисленных направлениях, сохраняя размер суммарной дозы, доставляемой к области-мишени, и снижая при этом сопутствующее воздействие на здоровую ткань.
Таким образом, система лучевой терапии, например система протонной дистанционной терапии, обычно обеспечивает условия для позиционирования и корректировки положения пациента в различных положениях относительно протонного пучка. Для определения предпочтительной прицельной точки пациента для протонного пучка при начальном планировании или на этапе назначения предписания необходимо проведение компьютерной томографии (КГ), которая позволяет определять различные рентгенограммы, воспроизведенные в цифровой форме (РЦФ). На рентгенограммах, воспроизведенных в цифровой форме (РЦФ), искусственно представлены трехмерные данные внутренней физиологической структуры пациента, которые получены при КГ в двух проекциях, рассмотренных с различных сторон, и таким образом могут служить изображением мишени для опухоли подлежащей облучению. Назначают заданный изоцентр мишени, совпадающий с опухолью, которой обеспечивают терапию. Пространственное расположение изоцентра мишени может быть соотнесено с физиологической структурой пациента (образцом), показанной на изображении мишени.
При осуществлении последующей настройки для доставки радиационной терапии создают радиографическое изображение пациента, например известное рентгеновское изображение, затем это изображение сопоставляют с изображением мишени или регистрируют с ним относительно заданного изоцентра мишени. Положение пациента корректируют, располагая изоцентр мишени максимально близко или в пределах допустимого отклонения в заданном положении относительно пучка протонов и в соответствии с назначением врача. Заданное положение часто выбирают в качестве положения начального планирования или сканирования для создания предписания.
Следует отметить, что для уменьшения вероятности смещения радиационного пучка относительно заданного изоцентра мишени для получения желаемого терапевтического эффекта и уменьшения неблагоприятного воздействия облучения на прочие ткани, важна точность размещения пациента относительно насадки пучка. В частности, изоцентр мишени располагают так, что при линейном перемещении он совпадает с осью доставляемого пучка, а также в надлежащем угловом положении для расположения пациента в заданном положении при вращении. В особенности пространственное расположение пика Брегга зависит, и от энергии доставляемого протонного пучка, и от глубины, и строения ткани пациента, через которую проходит пучок. Поэтому при вращении пациента вокруг изоцентра мишени даже при его линейной ориентации глубина и строение ткани между точкой начального столкновения и изоцентром мишени, расположенных в теле пациента, могут отличаться и таким образом изменять глубину проникновения.
Дополнительная трудность регистрации и позиционирования заключается в том, что режим лучевой терапии обычно включает несколько отдельных терапевтических сеансов, проводимых в течение определенного времени, например ежедневную терапию на протяжении периода в несколько недель.
Таким образом, корректировка положения пациента и изоцентра мишени, а также позиционирование пациента в заданном положении относительно пучка обычно многократно определяются и выполняются несколько раз на протяжении нескольких дней или недель.
При точном позиционировании пациента относительно устройства лучевой терапии возникает несколько проблем. Как указано выше, регистрацию пациента выполняют получая рентгеновские изображения пациента в месте получения лучевой терапии во время текущего терапевтического сеанса и сравнивая полученное изображение с полученной ранее рентгенограммой, воспроизведенной в цифровой форме, или с изображением мишени, применяемым для определения конкретного предписания для каждого пациента. При проведении последующих сеансов терапии точное повторение позы, в которой находился пациент при создании изображения мишени, например, положения, в котором компьютерный томограф создает изначальную РЦФ, невозможно, так как пациент изменяют свое положение и позу в устройстве лучевой терапии. Таким образом, при осуществлении каждого терапевтического сеанса или его части обычно необходимо точно совмещать рентгеновское изображение, полученное позже, с соответствующим РФЦ для упрощения определения поправочного вектора линейного движения и/или вращения для позиционирования пациента в заданном месте и позе.
Кроме трудностей измерения и вычисления, возникающих при реализации данной операции, существует необходимость не только точного, но и быстрого ее выполнения. В частности, устройство лучевой терапии представляет собой медицинское оборудование дорогое в установке и техническом обслуживании как благодаря материалам и оборудованию, необходимым для конструкции, так и благодаря необходимости использования достаточно высококвалифицированного медицинского персонала для управления им и его технического обслуживания. Учитывая большое количество раковых пациентов, получающих пользу от лучевой терапии, например протонной терапии, существует необходимость достижения большей пропускной способности как для повышения доступности данной терапии большему количеству пациентов, так и для снижения конечной стоимости терапии для пациентов или страховых компаний, оплачивающих терапию, а также для увеличения прибыльности терапии для ее поставщиков. По существу имеется потребность в системах поддержки и позиционирования пациента, использующих автоматизированные или роботизированные устройства позиционирования пациента, и таким образом в том, чтобы обеспечить поставщикам лучевой терапии возможность достижения большей пропускной способности. Сама подача дозы облучения представляет собой достаточно быстрый процесс. Однако дополнительные задержки при входе и выходе пациента из терапевтического устройства, создании изображения, размещении пациента и его регистрации снижают общую пропускную способность и, следовательно, доступность системы, ее доходность и повышают ее стоимость.
Дополнительные трудности точного позиционирования пациента и соответствующего изоцентра мишени в заданном положении и позе относительно насадки для пучка представляют собой многочисленные дополнительные погрешности точного положения и относительного угла различных компонентов системы лучевой терапии. Например, насадка для пучка может быть соединена с относительно жесткой конструкцией гентри с возможностью ее вращения вокруг центра гентри, что облегчает доставку радиационного пучка с различных углов относительно пациента, без необходимости весьма неудобного самостоятельного размещения пациента. Однако конструкция гентри выполнена достаточно большой (порядка нескольких метров), массивной и сконструирована из не полностью жестких материалов, поэтому неизбежно возникновение некоторого сгибания или деформации конструкции и однократного механического допуска при вращении насадки вокруг гентри. Более того, насадка может быть выполнена в виде удлиненной распределенной массы, также не полностью жесткой, так что дальний излучающий конец насадки может сгибаться до определенного уровня, например, при перемещении насадки от вертикального положения над головой к положению горизонтальной подаче пучка сбоку. Безошибочное определение точного положения насадки также затрудняется ее винтообразным изгибом относительно гентри.
Пациент может быть аналогичным образом помещен на поддерживающий желобок или стол, который может быть соединен с устройством позиционирования пациента и который подвержен определенному механическому изгибу под воздействием гравитационной нагрузки, а также механическим допускам в подвижных сочленениях, которые могут не полностью соответствовать диапазону возможных поз пациента. Факт этих отклонений возможно оценить и измерить, так как они обычно переменны и неповторяемы. Однако во время нескольких сеансов терапии достаточно сложно повторно располагать пациента на предсказуемой основе в одном и том же месте и положении в ограниченных пределах точности, например в пределах миллиметра, или с меньшей точностью. Таким образом, известен способ обращения к смещению гентри и стола для пациента путем перерегистрации пациента перед терапией.
Этот способ является нежелательным, так как для формирования изображения пациента подвергают дополнительному облучению рентгеновскими лучами, и уменьшается общая пропускная способность установки из-за дополнительной задержки при повторной регистрации.
Подвижные компоненты также выполняют большими и массивными, а следовательно, они требуют приводного движение. Эти компоненты проявляют при движении значительную инерцию и обычно приводятся в движение механическим приводом, поэтому возможно использовать систему безопасности с целью предотвращения травм и повреждений. Системы безопасности могут включать прерыватели энергии, основанные на переключателях. Переключатели активируются при прекращении движения в пределах диапазона перемещения, отключая питание от приводных электродвигателей. Ограничители резкой остановки или упоры также могут быть выполнены для физического ограничения движения в пределах заданного диапазона. Однако переключатели и ограничители резкой остановки приводят в действие, когда соответствующий компонент(ы) достигает предела движения, что приводит к достаточно резкой остановке, которая повышает износ механизма и может даже привести к повреждению в случае чрезмерного зацепления. Кроме того, блок ограничения движения из переключателей и/или упоров для предотвращения резкой остановки выполнен достаточно сложным для предотвращения столкновения различных компонентов. Это может приводить к неэффективной работе всей системы, если для облегчения задачи предотвращения столкновений задано ограничение на движение не более одного компонента за один раз.
Таким образом, существует необходимость увеличения точности и скорости процесса регистрации пациента. Кроме того, существует необходимость снижения количества повторных созданий изображений пациента и повторного расположения пациента с целью его размещения в заданной позе. Существует также потребность в создании системы с возможностью вычисления различных и не поддающихся прогнозированию ошибок расположения для увеличения точности регистрации пациента и корректировки положения в системе лучевой терапии.
Кроме того, существует необходимость создания системы избежания столкновений для поддержания безопасности работы и для защиты от повреждений при расположении различных подвижных компонентов системы лучевой терапии. Существует потребность в эффективном выполнении движений для сохранения точности и скорости при регистрации пациента.
Сущность изобретения
Один вариант выполнения системы корректировки положения пациента удовлетворяет указанным потребностям и выполнен с возможностью проведения внешних измерений и корректирующей обратной связи для вариантов и отклонений от номинального положения и размещения, направления между пациентом и доставляемым терапевтическим пучком излучения. Этот вариант выполнения может с легкостью приспосабливаться к различным непредсказуемым допускам механического движения и структурной гибкости неподвижных и подвижных компонентов системы лучевой терапии.
Этот вариант снижает необходимость в создании изображения пациента между частями терапии и уменьшает задержку процесса регистрации пациента, увеличивая, таким образом, пропускную способность установки. Еще один вариант выполнения включает систему активного планирования траектории, позволяющую определять эффективную процедуру перемещения и управлять движением для активного избежания столкновений оборудования и персонала.
Другой вариант выполнения представляет собой систему лучевой терапии, содержащую гентри, устройство закрепления пациента, выполненное с возможностью закреплять пациента относительно устройства фиксации пациента, позиционирующий механизм для позиционирования пациента, соединенный с устройством фиксации пациента с возможностью расположения устройства фиксации пациента вдоль осей линейного перемещения и вращения в гентри. Система лучевой терапии также содержит насадку для лучевой терапии, соединенную с гентри и осуществляющую лучевую терапию выборочно по направлению вдоль оси пучка, несколько устройств измерения внешних параметров, определяющих положение, по меньшей мере, устройства фиксации пациента и насадки, и контроллер, определяющий местоположение по меньшей мере устройства фиксации пациента и насадки и подающий сигналы управления к позиционирующему механизму для позиционирования пациента для расположения пациента в заданном положении относительно оси пучка.
Еще один вариант выполнения представляет собой систему позиционирования пациента для системы лучевой терапии, содержащую несколько подвижных компонентов. Система позиционирования пациента содержит несколько устройств измерения внешних параметров, расположенных с возможностью определения местоположения нескольких компонентов таким образом, чтобы предоставить информацию о положении, подвижную опору для пациента, выполненную с возможностью поддержания пациента по существу в фиксированном положении относительно опоры для пациента и управляемого позиционирования пациента в различных осях линейного перемещения и вращения. Кроме того, система содержит контроллер, принимающий информацию о положении с нескольких устройств измерения внешних параметров и передающий команды на перемещение к подвижной опоре пациента для корректировки положения пациента в заданной позе таким образом, что система позиционирования компенсирует движение нескольких компонентов.
Еще один вариант выполнения представляет собой способ регистрации и позиционирования пациента для подачи терапии, причем система включает множество подвижных компонентов. Данный способ включает этапы позиционирования пациента в исходной терапевтической позе с управляемым позиционирующим механизмом для позиционирования пациента, внутреннего измерения местоположения выбранных точек нескольких компонентов, определения вектора разницы между наблюдаемой исходной терапевтической позой и заданной позой пациента, и также этап подачи команд на перемещение к позиционирующему механизму для позиционирования пациента для расположения пациента в заданной позе.
Другой вариант выполнения изобретения представляет собой систему позиционирования пациента, используемую в сочетании с установкой лучевой терапии, содержащей несколько компонентов, которые включают источник частиц и насадку, испускающую частицы, причем насадка выполнена подвижной относительно пациента для облегчения подачи частиц к выбранной области пациента по нескольким различным траекториям. Система позиционирования пациента содержит позиционирующий механизм для позиционирования, принимающий пациента, причем позиционирующий механизм для позиционирования сконструирован подвижным для расположения пациента по направлению к насадке с целью упрощения подачи частиц к выбранной области пациента; систему мониторинга, которая создает изображение, по меньшей мере, одного компонента установки лучевой терапии, расположенного рядом с позиционирующим механизмом для позиционирования пациента, причем система мониторинга проявляет изображение показывающее размещение по крайней мере одного компонента относительно пациента перед терапией; и систему управления, управляющую доставкой частиц к пациенту и принимающую сигналы, предписывающие выполнение определенной терапии, причем сигналы включают заданное расположение, по меньшей мере, одного компонента для подачи частиц к пациенту. Система управления также принимает терапевтическое изображение и оценивает его для определения фактического расположения, по меньшей мере, одного компонента перед терапией и сопоставляет фактическое расположение одного компонента перед терапией с его заданным расположением и в случае несовпадения фактического положения с заранее установленными критериями заданного положения отправляет к позиционирующему механизму для позиционирования пациента сигналы на перемещение позиционирующего механизма для позиционирования таким образом, чтобы во время получения частиц фактическое положение пациента более точно соответствовало его заданному положению.
Дополнительный вариант выполнения представляет собой систему лучевой терапии, имеющую подвижные и неподвижные компоненты и включающую гентри, желобок для пациента, выполненный для обеспечения по существу неподвижного положения пациента относительно желобка, позиционирующий механизм для позиционирования пациента, соединенный с желобком с возможностью расположения желобка вдоль нескольких осей линейного перемещения и осях вращения в гентри. Система лучевой терапии также включает насадку для лучевой терапии, соединенную с гентри и выборочно подающую лучевую терапию вдоль оси пучка, несколько устройств измерения внешних параметров, определяющих положение, по меньшей мере, устройства фиксации пациента и насадки, и контроллер, принимающий информацию об измерении положения по меньшей мере от желобка для пациента и насадки и передающий команды на перемещение для расположения пациента в заданном положении относительно оси пучка и соответствующих траекториях перемещения желобка пациента относительно других подвижных и неподвижных компонентов системы лучевой терапии, на основании команд на перемещение, и определяющий, указывает ли команда на перемещение на столкновение, и предотвращающий перемещение при указании на столкновение.
Кроме того, некоторые варианты изобретения включают систему планирования траектории и избежания столкновения для системы лучевой терапии, имеющую неподвижные и подвижные компоненты и выборочно доставляющую пучок лучевой терапии вдоль оси пучка, систему позиционирования, включающую несколько устройств измерения внешних параметров расположенных с возможностью определения местоположения нескольких компонентов для предоставления информации о положении, подвижную опору для пациента, выполненную с возможностью поддержания пациента в фиксированном положении относительно опоры для пациента, и контролируемого позиционирования пациента в различных осях линейного перемещения и вращения. Система также содержит контроллер, принимающий информацию о положении с нескольких устройств измерения внешних параметров и передающий команды на перемещение к подвижной опоре пациента для автоматической корректировки положения пациента в заданной позе, и определяющий соответствующую огибающую перемещения, причем контроллер оценивает эту огибающую перемещения и останавливает движение опоры пациента, если данные указывают на столкновение, и начинает движение в противном случае.
Прочие варианты выполнения изобретения представляет собой способ регистрации и позиционирования пациента для подачи терапии с системой, включающей множество неподвижных и по меньшей мере один подвижный компонент. Данный способ включает этапы позиционирования пациента в исходной терапевтической позе с регулируемым позиционирующим механизмом для позиционирования пациента, измерения внешних параметров местоположения выбранных точек неподвижного компонента и по меньшей мере одного подвижного компонента, определения вектора разницы между наблюдаемой исходной терапевтической позой и заданной позой пациента, определения соответствующих команд на перемещение и траектории перемещения для расположения позиционирующего механизма для позиционирования пациента в заданной позе, а также этап сравнения траектории перемещения с измеренными положениями выбранных точек неподвижного и по меньшей мере одного подвижного компонента для остановки движения пациента, если при сравнении данные указывает на столкновение.
Эти и прочие цели и преимущества настоящего изобретения подробно раскрываются ниже со ссылками на прилагающиеся чертежи.
Краткое описание чертежей
Фиг.1А изображает принципиальную схему одного варианта выполнения системы лучевой терапии с системой позиционирования пациента, находящейся в одном положении.
Фиг.1В изображает принципиальную схему одного варианта выполнения системы лучевой терапии с системой позиционирования пациента, находящейся в другом положении.
Фиг.2А изображает один вариант выполнения выдвигаемых формирователей изображения в выдвинутом положении.
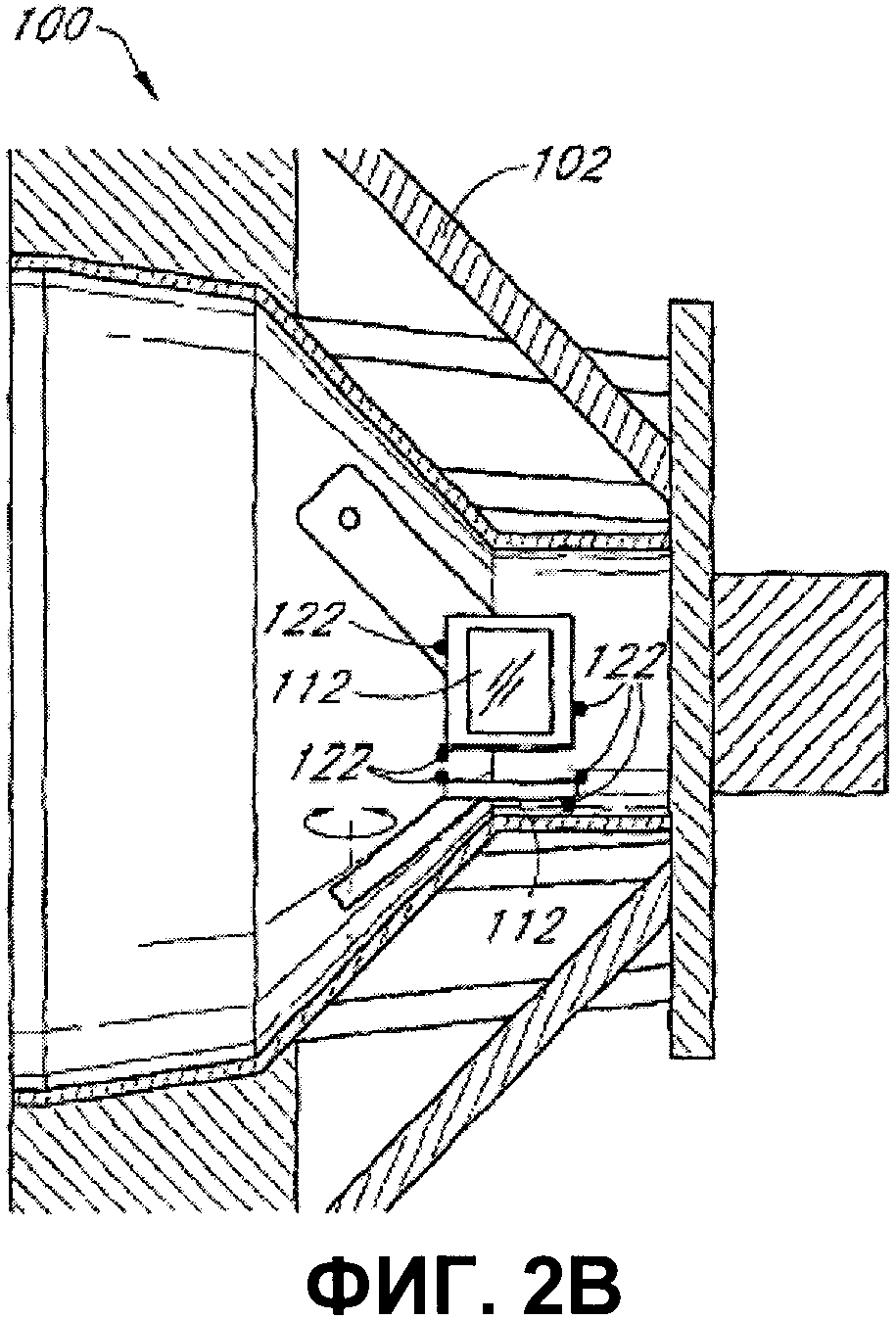
Фиг.2В изображает формирователи изображения во втянутом положении.
Фиг.3 изображает один вариант выполнения позиционирующего механизма для позиционирования, к которому может быть присоединен желобок для пациента.
Фиг.4А-4Е изображает различные варианты ошибок в определении местоположения источников для первого варианта выполнения системы лучевой терапии.
Фиг.5 показывает схему последовательности операций одного варианта выполнения способа определения местоположения и направления объектов среды лучевой терапии.
Фиг.6 изображает один вариант выполнения устройств измерения внешних параметров для системы лучевой терапии.
Фиг.7 изображает другие варианты выполнения устройств измерения внешних параметров для системы лучевой терапии.
Фиг.8 изображает схему последовательности операций для системы точного позиционирования пациента системы лучевой терапии.
Фиг.9 изображает схему последовательности операций для одного варианта системы измерения внешних параметров и системы шестимерных координат (далее по тексту 6D) для системы позиционирования пациента.
Фиг.10 изображает схему последовательности операций модуля регистрации пациента для системы позиционирования пациента.
Фиг.11 изображает схему последовательности операций модуля разработки траектории модуля управления перемещением для системы позиционирования пациента.
Фиг.12 изображает схему последовательности операций для модуля активного избежания столкновений для модуля управления перемещением системы позиционирования пациента.
Фиг.13 изображает схему последовательности операций для модуля активного избежания столкновений и координатора последовательности перемещений системы позиционирования пациента.
Фиг.14 изображает схему последовательности операций управления одним вариантом способа позиционирования пациента и подачи лучевой терапии.
Подробное описание предпочтительного варианта выполнения
Описание приведено со ссылками на прилагающиеся чертежи, на которых аналогичные части обозначены одними теми же номерами. На фиг.1А и 1В схематично показаны первое и второе расположение одного варианта выполнения системы лучевой терапии 100, например, основанной на системе протонной терапии, используемой в Калифорнии в Медицинском центре университета Лома Линда и описанной в патенте США №4,870,287, зарегистрированном 26 сентября 1989, содержание которого целиком включено в данный документ посредством ссылки на него. Система лучевой терапии 100 выполнена с возможностью подачи терапевтических доз облучения к областям-мишеням больного для лечения злокачественных состояний (опухолей) или других состояний, по меньшей мере, под одним углом или в одном направлении относительно пациента. Система лучевой терапии 100 включает гентри 102, которая включает опорную раму в целом полусферической формы или в форме усеченного конуса для прикрепления и поддержки других компонентов системы лучевой терапии 100. Дальнейшие подробности конструкции и работы вариантов выполнения гентри 102 описаны в патентах США №4,917,344 и №5,039,057, содержание которых целиком включено в данный документ посредством ссылки на них.
Система 100 также включает насадку 104, прикрепленную к гентри 102 и поддерживаемую ей с возможностью относительно точного вращения гентри 102 и насадки 104 вокруг изоцентра гентри 120, которые, однако, подвергаются винтообразному изгибу, перекосу и другим отклонениям от заданного движения.
Система 100 также содержит источник 106 радиационного излучения, доставляющий терапевтический пучок вдоль оси радиационного пучка 140, например пучок ускоренных протонов. Радиационный пучок проходит через отверстие 110, расположенное у дальнего конца насадки 104, и принимает определенную форму для определения терапевтического пучка доставляемого вдоль оси подачи 142. Отверстие предпочтительно выполнено в соответствии с определенным предписанием лучевой терапии для пациента. В конкретных вариантах применения несколько отверстий 110 выполнены пригодными для различных терапевтических частей.
Кроме того, система 100 включает, по меньшей мере, один формирователь изображения 112, выполненный с возможностью перемещения из выдвинутого положения, как показано на фиг.2А, во втянутое положение, как показано на фиг.2В, относительно гентри 102. В соответствии с данным вариантом формирователь изображения 112 содержит монолитный формирователь рентгеновского изображения из аморфного кремния с возможностью проявления графической информации, полученной, например, от падающего рентгеновского излучения, прошедшего через тело пациента. Выдвигаемость формирователя изображения 112 предоставляет преимущественную возможность отведения экрана формирователя изображения с оси подачи 142 источника радиационного излучения 106, когда формирователь изображения 112 не требуется, обеспечивая, таким образом, дополнительное пространство в камере гентри 102 и убирая формирователь изображения 112 с траектории потенциально вредного излучения от источника радиационного излучения 106. Таким образом, уменьшается необходимость в экранировании/предоставлении щита для формирователя изображения 112.
Система 100 содержит, по меньшей мере, один соответствующий источник рентгеновских лучей 130, который выборочно испускает отвечающее требованиям рентгеновское излучение вдоль, по меньшей мере, одной оси 144 источника рентгеновских лучей, проходящее через промежуточную ткань пациента, создавая рентгеновское изображение промежуточных материалов при помощи формирователя изображения 112. В различных вариантах применения предпочтительная энергия, доза частиц, продолжительность облучения и прочие параметры воздействия различны для источника(ов) 130 для формирования изображения и для источника радиационного излучения 106. Они известны специалистам в области изобретения и определяются ими.
В данном варианте, по меньшей мере, один источник рентгеновских лучей 130 выполнен с возможностью размещения таким образом, что ось 144 источника рентгеновских лучей может быть расположена номинально совпадающей с осью подачи 142. Данный вариант изобретения предоставляет преимущество проявления изображения пациента для регистрации с точки зрения номинально идентичной терапевтической точке зрения.
Данный вариант выполнения также отличается тем, что пара первого формирователя изображения и источника излучения 130 расположена в целом ортогонально паре второго формирователя изображения и источника излучения 130. Этот вариант обеспечивает преимущество создания рентгеновского изображения пациента с двух ортогональных проекций для увеличения точности регистрации пациента, как подробно описано ниже. Система формирования изображений может быть выполнена аналогично системам, описанным в патентах США №5825845 и 5117829, содержание которых полностью включено в данный документ посредством ссылок на них.
Система 100 содержит также позиционирующий механизм для позиционирования 114 (фиг.3) и желобок 116 для пациента, прикрепленный к дальнему, рабочему концу позиционирующего механизма для позиционирования 114 для пациента. Позиционирующий механизм для позиционирования 114 выполнен с возможностью расположения желобка 200 в нескольких осях линейного перемещения и осях вращения при получении соответствующих команд на перемещение. Позиционирующий механизм для позиционирования предпочтительно выполнен с возможностью расположения желобка 116 в трех ортогональных осях линейного перемещения и трех ортогональных осях вращения, обеспечивая все шесть степеней подвижности для размещения желобка для пациента.
Желобок 116 для пациента выполнен с возможностью надежно удерживать пациента на месте в желобке 116 для подавления любого перемещения пациента относительно желобка 116. В различных вариантах выполнения желобок 116 содержит расширяющуюся пену, прикусные блоки и/или лицевые маски, как устройства и/или материалы иммобилизации. Желобок 116 для пациента также предпочтительно выполнен с возможностью уменьшения затруднений, возникающих при предписанной подаче части терапии на краю или в пограничной области желобка 116 для пациента.
Дополнительные подробности предпочтительных вариантов выполнения позиционирующего механизма для позиционирования 114 и желобка 116 для пациента описаны в заявках (серийный номер неизвестен, в реестре поверенного LOMARRL. 128VPC), озаглавленных «Модульная Система Поддержки Пациента», настоящим одновременно зарегистрированных в данном документе, содержание которых целиком включено в данный документ посредством ссылки на них.
Как указано выше, в некоторых вариантах применения системы 100, например, если система содержит систему протонной лучевой терапии, важной целью системы является точное относительное позиционирование и положение оси подачи 142 терапевтического пучка от источника радиационного излучения 106 с тканью-мишенью в пациенте, поддерживаемом желобком пациента 116 и позиционирующим механизмом для позиционирования 114 пациента. Однако, как указано выше, различные компоненты системы 100, например гентри 102, насадка 104, источник радиационного излучения 106, формирователь изображения 112, позиционирующий механизм для позиционирования пациента 114 для пациента, желобок 116 для пациента, источник (источники) рентгеновских лучей 130, подвергаются некоторому структурному сгибанию и допускам перемещения относительно номинального положения и направления, что может влиять на точность подачи пучка пациенту.
На фиг.1А и 1В проиллюстрированы конкретные расположения определенных компонентов системы 100 и прерывистыми стрелками указаны отклонения линейного перемещения и/или вращения от номинального положения, возникающие в системе 100. Например, в варианте, показанном на фиг.1А, насадка 104 и первый формирователь изображения 112 продолжаются в горизонтальном направлении и подвергаются уклону, в частности на их соответствующих дальних концах, из-за воздействия силы тяжести. Второй формирователь изображения 112 расположен в целом вертикально и не подвержен горизонтальному отклонению первого формирователя 112. На фиг.1В показана система 100 другого варианта выполнения, вращающаяся в положении приблизительно 45' против часовой стрелки от расположения, показанного на фиг.1А. В данном положении оба формирователя изображения 112 и насадка 114 подвергаются отклонению под воздействием силы гравитации, однако на градус, отличный от градуса отклонения при расположении, изображенном на фиг.1А. При перемещении гентри 102 между различными положениями, как показано на фиг.1А и 1В, различные ее компоненты также подвергаются механическим допускам на движущихся поверхностях. Все подобные отклонения от номинала являются, по меньшей мере, отчасти непредсказуемыми, дополнительными и не повторяются. Введение поправок на отклонения на предсказуемой основе весьма сложно и ограничивает общую точность позиционирования. Далее разъясняется, что эти отклонения от номинального положения системы являются примерными и в описанной системе может иметь место любое количество источников погрешностей без отклонения от объема настоящего изобретения.
На фиг.4А-4Е подробно показаны варианты потенциальных погрешностей или ошибок, которые могут возникать при процедуре совмещения, например, насадки 104 и мишени пациента у изоцентра 120. На фиг.4А-4Е изображены источники погрешности или ошибки при конкретных расстояниях и положениях. Далее поясняется, что источники описанных погрешностей являются исключительно примерами типов погрешностей, к которым обращается система 100 описанных вариантов выполнения изобретения, и что описанная система 100 может обращаться к другим погрешностям. В этом варианте выполнения расстояние SAD определяют как расстояние от источника до оси - от источника 106 радиационного излучения до оси вращения гентри, которая, в идеальном случае, проходит через изоцентр 120. В целях разъяснения и оценки относительного масштаба и расстояний в этом варианте выполнения SAD приблизительно равен 2,3 метрам.
На фиг.4А проиллюстрировано, что один из потенциальных источников погрешностей представляет собой источник погрешностей, в котором истинное расположение источника 106 радиационного излучения подвержено отклонению от номинального положения. В данном варианте выполнения терапевтический радиационный пучок, испускаемый источником 106 радиационного излучения, проходит через две ионизационные камеры, которые служат для центрации пучка. Камеры обозначены как TIC 1 и TIC 3 и прикреплены к соплу 104.
Начальная погрешность может проистекать от различных источников, включая перемещение пучка, наблюдаемое в TIC 1 и/или TIC 3, погрешность действительного угла вращения гентри 102 и ошибку из-за "egging" или отклонения от окружности при вращении гентри 102. На фиг.4А показана начальная погрешность, включающая отклонение действительного положения источника 106 радиационного излучения от предполагаемого или номинального положения и распространение радиационного пучка по расстоянию SAD через отверстие 110, обуславливающие соответствующую погрешность у изоцентра 120.
На фиг.4В показана возможная погрешность, вызванная ошибкой расположения TIC, причем TIC 1, источник 106 радиационного излучения и TIC 3 отклоняются от идеальной оси пучка, проходящей через номинальный изоцентр гентри 120. Ошибки, проиллюстрированные на фиг.4А и 4В, считают случайными и некоррелированными, поэтому они могут быть соединены в квадратуре и воплощены проходящими через номинальный центр отверстия 110 для установления общего количества ошибок из-за ошибки источника 106 радиационного излучения, перенесенной на изоцентр 120. В данном варианте выполнения перед применением корректирующих мер (как подробно описано ниже) ошибка источника радиационного излучения может составлять приблизительно от 0,6 до 0,4 мм.
На фиг.4С показана ошибка или погрешность, вызванная положением отверстия 110. Предполагают, что положение источника 106 радиационного излучения номинальное, однако наложение допусков, отклонение и сгибание насадки 104, а также производственные допуски самого отверстия 110 вызывают погрешность или ошибку. Кроме того, возможна ошибка прицельной точки подачи пучка (ПТПП) между номинальной ПТПП и действительной ПТПП при выпускании пучка из источника 106 радиационного излучения по расстоянию SAD к номинальному изоцентру 120.
В этом варианте выполнения данная ошибка, возникающая из-за ошибки в расположении отверстия 110, варьируется приблизительно в пределах от 1,1 до 1,5 мм.
Кроме того, в системе 100 может возникать ошибка из-за расположения формирователя (формирователей) изображения 112, а также источника (источников) 130 рентгеновских лучей, как показано на фиг.4D и 4Е. На фиг.4D показана ошибка из-за погрешности в расположении формирователя (формирователей) изображения 112 при номинальном положении соответствующего источника (источников) 130 рентгеновских лучей. От источника 130 рентгеновских лучей излучение проходит через пациента, расположенного по существу в изоцентре 120, и далее к формирователю изображения 112, поэтому это расстояние может быть отличным от расстояния SAD и быть приблизительно равным 2,2 метрам. Ошибка или погрешность в действительном положении формирователя изображения 112 может возникать из-за бокового смещения в действительном положении формирователя изображения 112, ошибок из-за осевого смещения формирователя изображения 112 относительно соответствующего источника130 рентгеновских лучей, а также ошибки регистрации изображений, получаемых формирователем 112 к рентгенограммам, воспроизведенным в цифровой форме. В данном варианте выполнения перед коррекцией ошибок ошибка каждого формирователя изображения 112 составляет приблизительно 0,7 мм.
На фиг.4Е аналогичным образом показаны ошибки, возникающие из-за погрешности в расположении источника 130 рентгеновских лучей при номинальном положении соответствующего формирователя изображения 112.
Возможные источники ошибки, возникающие из-за источника 130 рентгеновских лучей, включают ошибки из-за начального положения источника 130 рентгеновских лучей, из-за перемещения источника 130 рентгеновских лучей в траекторию и вне траектории пучка, а также ошибки, появляющиеся при оценке прогиба и относительных расстояний TIC 1 и TIC 3. Данные ошибки также считают случайными и некоррелированными или независимыми и, следовательно, добавляют в квадратуру, что в данном варианте дает в результате ошибку, обусловленную каждым источником 130 рентгеновских лучей и приблизительно равную А 0,7.
Все эти ошибки являются случайными, независимыми и некоррелированными и, следовательно, потенциально дополнительными, поэтому в данном варианте выполнения система 100 также включает несколько устройств 124 измерения внешних параметров для оценки и облегчения компенсирования ошибок. В одном варианте выполнения система 100 также содержит образцы (физиологической структуры пациента), например маркеры 122, взаимодействующие с устройствами 124 измерения внешних параметров, как показано на фиг.2А, 2В, 6 и 7. Каждое устройство 124 измерения внешних параметров получает данные измерения трехмерного положения в пространстве одного или двух компонентов системы 100, на которое указывают образцы, а также, по меньшей мере, один закрепленный ориентир 132, называемый в данном документе «миром» 132.
В данном варианте выполнения устройства 124 измерения внешних параметров содержат серийно-выпускаемые камеры, например цифровые камеры CMOS с мегапиксельным расширением и частотой кадров в 200-100 Гц, которые независимо получают оптические изображения объектов в поле зрения 126, которое в этом варианте выполнения приблизительно равняется 85° по горизонтали и 70' по вертикали.
Устройства 124 измерения внешних параметров, содержащие цифровые камеры, являются серийно-выпускаемыми, например, как компонент системы Vicon Tracker от Vicon Motion Systems me. of Lake Forrest, CA. Однако в других вариантах выполнения изобретения устройства 124 измерения внешних параметров могут содержать лазерные устройства измерения параметров и/или устройства радиолокации в дополнение или как альтернативу к оптическим камерам данного варианта.
В данном варианте выполнения маркеры 122 содержат сферические сильноотражающие реперы, которые прикреплены к различным компонентам системы 100. В данном варианте выполнения, по меньшей мере, три маркера 122 прикреплены к каждому компоненту интереса системы 100 и предпочтительно асимметрично расположены, например неравно удалены от осевой линии и неравномерно расположены в углах, вокруг объекта. Устройства 124 измерения внешних параметров расположены так, что, по меньшей мере, два устройства 124 измерения внешних параметров имеют заданный компонент системы 100 и соответствующие маркеры 122 в их поле зрения, и в одном варианте выполнены десять устройств 124 измерения внешних параметров. Эта особенность изобретения обеспечивает системе 100 возможность бинокулярного зрения для обеспечения более точного определения положения и направления компонентов системой 100. Маркеры 122 выполняют для облегчения распознания и точного определения положения и направления объектов, к которым прикреплены маркеры 122, однако в других вариантах выполнения система 100 использует устройства 124 измерения внешних параметров для получения информации о положении, основанной на образцах и содержащей характерные внешние контуры объектов, например краев или углов, содержащих систему 100 без применения наружных маркеров 122.
На фиг.5 показан один вариант определения положения в пространстве и углового направления компонента системы 100. Компонентами(ы), представляющими интерес, могут быть гентри 102, насадка 104, отверстие 110, формирователь изображения 112, «мир» 132 или прочие компоненты, далее именуемые общим термином «объект». Ниже разъясняется, что описанный для объекта процесс может протекать параллельно с несколькими процессами в нескольких объектах.
После исходного состояния в состоянии 150 система 100 калибрует несколько устройств 124 измерения внешних параметров относительно друг друга и относительно «мира» 132. В состоянии калибровки система 100 определяет положение в пространстве и угловое направление каждого устройства 124 измерения внешних параметров. Кроме того, система 100 определяет положение «мира» 132, которое может быть найдено при помощи специально специализированной L-образной рамки и может определять начало координат пространства или систему отсчета системы 100. «Мир» 132 может содержать любой компонент структуры, по существу закрепленный в поле зрения устройств 124 измерения внешних параметров. Следовательно, структуры не подверженные перемещению или отклонению в результате деятельности системы 100 могут содержать «мир» 132 или точку привязки для устройств 124 измерения внешних параметров.
В полях зрения 126 устройств 124 измерения внешних параметров перемещают зонд, который может включать, по меньшей мере, один маркер 122. Устройства 124 измерения внешних параметров расположены так, что несколько устройств 124 измерения внешних параметров (по меньшей мере, два для данного варианта выполнения) имеют объект в активной зоне системы 100 в их поле зрения 126 в любое установленное время, поэтому система 100 сопоставляет информацию о положении и направлении, предоставляемую независимо от каждого устройства 124 измерения внешних параметров, и определяет корректирующие факторы, обеспечивая независимую информацию о положении и направлении, которая согласуется с последующей калибровкой.
Конкретные математические этапы для калибровки устройств 124 измерения внешних параметров зависят от количества последних, их относительного расположения, геометрического направления относительно друг друга и «мира» 132, а также от используемой системы координат и могут быть разными для различных целей применения, что очевидно специалисту в области изобретения. Кроме того, в определенных случаях применения изобретения, если после калибровки, по меньшей мере, одно из устройств 124 измерения внешних параметров или «мир» 132 перемещается, необходимо повторить состояние калибровки 150.
В состоянии 152 после состояния калибровки 150 несколько устройств 124 измерения внешних параметров получают изображение объекта (объектов) интереса. Благодаря изображениям, полученным в режиме 152, система 100 определяет соответствующий вектор направления 155 к объекту от каждого соответствующего устройства 124 измерения внешних параметров, которое показывает объект в состоянии 154.
Эти векторы показаны на фиг.6 как векторы 155a-d, соответствующие устройствам 124a-d измерения внешних параметров, имеющим объект в их соответствующих полях зрения/зонах обзора 126. Затем в состоянии 156 система 100 рассчитывает точку в пространстве, в которой пересекаются векторы 155 (фиг.6), определенные в состоянии 154. Таким образом, в состоянии 156 объект, соответствующий нескольким векторам, пересекающимся в месте его расположения, возвращается в трехмерное положение в пространстве относительно «мира» 132. Система 100 может также определить трехмерное угловое направление объекта, оценив относительные положения конкретных маркеров 122, связанных с объектом, так как объект имеет, по меньшей мере, три перемещения или маркера 122. В данном варианте выполнения устройства 124 измерения внешних параметров содержат камеры, однако для формирования изображений, например для определения расположения образцов, может быть использовано любое количество различных устройств без отклонения от сущности изобретения. В особенности, устройства, испускающие или принимающие электромагнитную или аудиоэнергию, включая энергию волны видимой или невидимой длины и ультразвук, могут быть использованы для формирования изображения или определения положения образцов.
Информация о положении и направлении объекта определяется в состоянии 160 для использования в системе 100, как подробно описано ниже. В одном варианте выполнения состояние 150 может выполняться в течение приблизительно одной минуты и позволяет системе 100 определять положение объекта в состояниях 152, 154, 156 и 160 до 0,1 мм и положение до 0,15° с задержкой не более 10 мс.
В других вариантах выполнения, как указано выше, устройства 124 измерения внешних параметров могут включать лазерные устройства измерения параметров, устройства радиолокации или прочие устройства, которые могут определять направление или расстояние от устройств 124 измерения внешних параметров в дополнение или как альтернативу к описанным выше устройствам 124 измерения внешних параметров. Таким образом, в определенных вариантах выполнения одно устройство 124 измерения внешних параметров может определять диапазон и направление до объекта для определения положения и направления объекта. В других вариантах выполнения устройства 124 измерения внешних параметров предоставляют только информацию о расстоянии до объекта, а размещение объекта в пространстве определяют находя пересечение нескольких виртуальных сфер, центрированных на соответствующих устройствах 124 измерения внешних параметров. В определенных вариантах система 100 также включает, по меньшей мере, одно устройство обратной связи по положению или распознаватель 134 (см., напр., фиг.1). Устройства обратной связи по положению или распознаватели 134 выполнены, по меньшей мере, в одном компоненте системы 100 или по меньшей мере соединенными с этим компонентом, например с гентри 102, насадкой 104, источником 106 радиационного излучения, отверстием 110, формирователем (формирователями) изображения 112, позиционирующим механизмом для позиционирования пациента 114, желобком пациента 116 и/или «миром» 132.
Устройства 134 обратной связи по положению предоставляют независимую информацию о положении и направлении компонента системы 100. В различных вариантах выполнения устройства 134 обратной связи по положению содержат угловой кодер, линейный кодер, серво и прочие указатели положения, которые выпускают серийно и работа которых хорошо известна специалистам в области изобретения. Устройства 134 обратной связи по положению предоставляют независимую информацию о положении, которая может быть использована системой 100 в дополнение к информации, предоставляемой устройствами 124 измерения внешних параметров для более точного расположения пациента.
В данном варианте система 100 также включает точную систему 200 корректировки положения пациента, которая использует информацию о положении, предоставленную в состоянии 160 для объекта (объектов).
Как показано на фиг.8, система 200 корректировки положения пациента содержит модуль 202 управления и контроля, соединенный с 6D системой 204, модуль 206 регистрации пациента, файлы данных 210, модуль управления движением 212, модуль безопасности 214 и пользовательский интерфейс 216. Система 200 корректировки положения пациента использует информацию о положении, предоставленную 6D системой 204 для более точной регистрации пациента и перемещения сопла 104 и для достижения позиционирующим механизмом для позиционирования 114 пациента заданного положения, указанного в предписании для пациента, предоставленном в файлах данных 210.
В этом варианте выполнения 6D система 204 принимает информацию о положении от устройств 124 измерения внешних параметров и от распознавателей 134, относящуюся к текущему расположению насадки 104, отверстия 110, формирователя изображения 112, позиционирующего механизма для позиционирования 114 и желобка 116 для пациента, а также расположения по крайней мере одного закрепленного репера 132, изображенного на фиг.9 как «мир» 132. Закрепленные реперы или мир 132 представляют собой неподвижное начало координат или систему отсчета, упрощающие определение положения движущихся компонентов системы лучевой терапии 100. Эту информацию о положении предоставляют системе 220 определения начального положения 6D, которая затем использует данные наблюдений от устройств 124 измерения внешних параметров и от распознавателей 134 для расчета координат положения и ориентации, направления этих пяти компонентов и начала координат в первой системе отсчета. Эта информация о положении передается к модулю 222 6D координации, содержащему модуль 224 преобразования координат и модуль арбитража 226. Модуль 224 преобразования координат выполнен соединенным с другими модулями системы 200 корректировки положения пациента, например с модулем 202 управления и контроля и модулем 212 избегания столкновений.
В различных режимах процесса регистрации пациента и подачи терапии прочие модули системы 200 корректировки положения пациента могут передавать 6D системе 204 вызовы на запрос о положении при текущей конфигурации системы лучевой терапии 100.
Другие модули системы 200 корректировки положения пациента могут передавать 6D системе 204 вызовы, например запрос о преобразовании координат. Подобные запросы обычно включают передачу данных о местоположении в заданной системе отсчета, указание системы отсчета, в которой передают данные и заданной система координат, в которую модуль, отправивший вызов, требует перевести данные о положении. Этот запрос о переводе координат передается к модулю 224 преобразования координат, который выполняет соответствующие расчеты над представленными данными в данной системе отсчета, и преобразовывает эти данные в заданную систему координат, и отправляет их обратно к модулю системы 200 корректировки положения пациента, отправившему запрос.
Так, например, система лучевой терапии может определить, что для правильной регистрации пациента показано перемещение позиционирующего механизма для позиционирования 114 пациента. Так, например, может отображаться сдвиг на 2 мм вдоль оси X, минус 1,5 мм по оси У, никаких изменений по оси Z и положительное вращение на 1° вокруг вертикальной оси. Эти данные передается к модулю 224 преобразования координат, который выполняет над ними операции и передает обратно позиционирующему механизму для позиционирования 114 пациента соответствующие команды на движение. В различных вариантах выполнения системы 100, например, в зависимости от точной конфигурации и размеров позиционирующего механизма для позиционирования 114 пациента и относительного положения пациента по отношению к другим компонентам системы 100, преобразования координат будут различными. Однако специалист в области изобретения может легко определить подобные преобразования координат для конкретного варианта применения.
Модуль управления 226 участвует в работе модуля управления движением 212, предоставляя конкретную информацию о положении объекта при получении запроса о положении. Система 230 определения вторичного положения обеспечивает альтернативную или дублирующую функцию определения местоположения различных компонентов системы 100. В одном варианте выполнения система 230 определения вторичного положения имеет обычные функциональные возможности по определению местоположения, использующие информацию о расчетном положении, основанную на исходном положении и запрограммированных перемещениях. В еще одном варианте выполнения система 220 определения начального положения принимает информацию от устройств 124 измерения внешних параметров, а система 230 определения вторичного положения принимает независимую информацию о положении от распознавателей 134. Система 220 измерения 6D предпочтительно выполняет функцию системы начального позиционирования, что обеспечивает описанные выше преимущества точности и скорости позиционирования.
На фиг.10 подробно показан модуль 206 регистрации системы 200 пациента. Как описано выше, система 204 определяет местоположения различных компонентов системы лучевой терапии 100, включая стол или желобок 116 для пациента и насадку 104, и определяет координаты положения этих компонентов, и предоставляет их в требуемой системе отсчета. Файлы данных 210 предоставляют информацию, относящуюся к предписанию терапии пациента, включая план терапии и данные компьютерной томографии, полученные до этого на сеансе планирования или предписания. Эти данные пациента могут быть сформированы преобразователем данных 232 для предоставления данных в предпочтительном формате.
Кроме того, информация о местоположении предоставляется формирователем изображения 112 в 6D системе 204 и модулю 236 захвата изображения. Модуль 236 захвата изображения получает необработанные изображения от формирователя изображения 112 и обрабатывает эти данные посредством, например, фильтрования, коррекции экспозиции, масштабирования и кадрирования, предоставляя скорректированные изображения для алгоритма 241 регистрации.
В этом варианте выполнения изобретения данные компьютерного томографа на этапе промежуточной обработки проходят через модуль 234 создания транс-графика для перевода данных компьютерного томографа в транс-графики, которые предоставляются для алгоритма 241 регистрации. Транс-графики представляют собой промежуточное представление промежуточных данных и увеличение скорости создания рентгенограмм, воспроизведенных в цифровой форме (РЦФ). Алгоритм 241 регистрации определяет зарегистрированное положение, информация о котором предоставляется модулю 202 управления и контроля, используя транс-графики, план терапии, данные о текущем положении объекта, предоставленные 6D системой 204, и скорректированные изображения от формирователя (формирователей) изображения 112.
Алгоритм 241 регистрации стремится сопоставить скорректированное изображение от формирователя изображения 112 с рентгенограммой, воспроизведенной в цифровой форме (РЦФ), максимально точно или в пределах заданной погрешности. Модуль 202 управления и контроля выполнен с возможностью оценивать текущую зарегистрированную позу и передавать команды или запросы, побуждающие к перемещению, по меньшей мере, одного компонента системы лучевой терапии 100, для достижения заданной позы. Дополнительные подробности пригодного алгоритма регистрации описаны в докторской диссертации Дэвида А Ла Роуз, опубликованной в мае 2001, представленной на рассмотрение Университета Карнеги-Меллона и озаглавленной «Интерактивная регистрация рентгеновского изображения/компьютерной томограммы с использованием ускоренной объемной визуализации»
Варианты выполнения, в которых система 100 выполняет это движение, показаны на фиг.11-13. На фиг.11 изображено, что модуль 202 управления и контроля отправляет запрос на перемещение, по меньшей мере, одного компонента системы лучевой терапии 100.
В состоянии 238 модуль управления движением 212 извлекает конфигурацию текущего положения из 6D системы 204 и передает конфигурацию нового положения модулю планирования траектории 240. Модуль планирования траектории 240 содержит библиотеку данных пространственных моделей, которые представляют собой огибающие положения, определенные возможными движениями различных компонентов системы лучевой терапии 100. Например, формирователь изображения 112 выполнен, как описано выше, с возможностью выдвижения, а модуль 242 данных пространственных моделей указывает огибающую или объем в пространстве, в котором может перемещаться формирователь изображения 112, в зависимости от его настоящего и конечного положений.
Кроме того, модуль планирования траектории 240 содержит симулятор 244 движения объекта, принимающий данные от модуля 242 данных пространственных моделей и способный рассчитать воспроизводимое движение для различных компонентов системы лучевой терапии 100, основываясь на этих данных. Модуль 244 симуляции движения объекта предпочтительно взаимодействует с модулем 270 избежания столкновений, как показано на фиг.12. На фиг.12 показан один вариант работы 6D системы 204, которая в одном варианте определяет местоположения отверстия 110, формирователя изображения 112, насадки 102, позиционирующего механизма для позиционирования пациента и желобка для пациента 114 и 116, а также закрепленных реперов или «мира» 132. На фиг.12 также изображено, что в данном варианте выполнения обратную связь получают от распознавателей 134, соответствующих позиционирующему механизму для позиционирования пациента 114, насадке 104, формирователю изображения 112 и углу гентри 102.
Эту информация по положению предоставляет модуль 270 избежания столкновений, который получает информацию об объекте в библиотеке 272 данных положения объекта. Подобные данные об объекте предоставляют модулю 274, который оценивает контролепригодность данных. В определенных вариантах благодаря оценке модуля 274 могут быть обнаружены возможные противоречия или конфликты в данных о положении объекта в библиотеке, например, устаревшие данные или данные, указывающие, что несколько объектов занимают одно и то же положение. При определении конфликта или устаревшего состояния, например негативного результата операций модуля 274, в состоянии 284 показана остановка системы для предотвращения дальнейшего перемещения компонентов системы лучевой терапии 100. Затем следует состояние 286 устранения неисправностей, в котором предпринимаются соответствующие меры для исправления или коррекции ошибки или ошибок. По завершении состояния 286 устранение неисправностей выполняют восстановленное состояние 290, после которого осуществляется возвращение к извлечению данных положения объекта библиотеки в модуле 272.
При положительной оценке состояния 274 за ним следует состояние 276, в котором модуль 270 избежания столкновений рассчитывает относительные расстояния вдоль текущих и намеченных траекторий и предоставляет эту расчетную информацию для состояния оценки 280, в котором определяют, не слишком ли близко находится, по меньшей мере, один объект или компонент системы лучевой терапии 100. При отрицательной оценке в состоянии 280, например, если текущие положения и намеченные траектории не представляют опасности столкновения, следует ждущий режим или режим паузы 282, при котором возможно продолжение заданного движения, по меньшей мере, одного компонента системы лучевой терапии 100. Затем осуществляется переход к рекурсивной последовательности, в соответствии с предписанием, через модули 272, 274, 276, 280 и 282.
Однако при положительных результатах состояния оценки 280, например, при обнаружении нахождения, по меньшей мере, одного объекта слишком близко или при обнаружении факта, что намеченные траектории проводят к столкновению, выполняется системная остановка состояния 284, а затем выполняется состояние 286 устранения неисправностей и восстановленное состояние 290, как описано выше. Таким образом, модуль 279 избежания столкновений предоставляет системе лучевой терапии 100 возможность профилактически оценивать текущие и намеренные положения и траектории движения подвижных компонентов системы 100 для подавления возможного столкновения до того, как оно произошло или даже началось. Этот способ является преимущественным для систем с остановкой движения, например, переключателем, который останавливает перемещение при активации переключателя останова или выключателя, которых может быть недостаточно для предотвращения повреждения возможно достаточно больших движущихся компонентов, обладающих значительной инерцией или для предотвращения причинения травмы пользователю или пациенту системы.
Если модуль 244 симуляции движения объекта во взаимодействии с модулем 270 избежания столкновений показывает, что предписанные движения не создают риска столкновения, к модулю 246 координирования последовательности движения направляют команды на фактическое перемещение. Модуль 246 определяет предписанные векторы движения, по меньшей мере, одного компонента системы лучевой терапии 100 и последовательно проводит эти движения через пять модулей преобразования в данном варианте. В частности, модули преобразования 250, 252, 254, 260, и 262 переводят предписанные векторы движения из предоставленной системы координат в требуемую систему координат, пригодную для позиционирующего механизма для позиционирования 114 пациента, гентри 102, источника 130 рентгеновских лучей, формирователя изображения 112 и насадки 104 соответственно.
Как указано выше, различные подвижные компоненты системы лучевой терапии 100 могут быть выполнены разных размеров и иметь различные параметры управления, а модули преобразования 250, 252, 254, 260, и 262 устанавливают взаимосвязь с вектором движения для соответствующего компонента системы лучевой терапии 100 или переводят его из первой системы координат в требуемую систему координат. Например, в данном варианте выполнения гентри 102 выполнена с возможностью вращения по и против часовой стрелки вокруг оси, причем позиционирующий механизм для позиционирования 114 пациента выполнен с возможностью позиционирования в шести степенях подвижности поступательного и вращательного движения и, следовательно, команды на его перемещение осуществляются в системе координат, отличной от системы координат гентри 102. Модуль 246 координирования последовательности движения может эффективно планировать непосредственное, безопасное и эффективное перемещение этих компонентов.
На фиг.14 показана последовательность выполняемых действий или способ 300 первого варианта работы системы лучевой терапии 100, оснащенной системой 200 корректировки положения пациента. За стартовым состоянием следует состояние идентификации 304, при котором определяется конкретный пациент и предоставляемый терапевтический портал. После этого следует состояние 306 поиска терапевтического предписания, а состояния идентификации 304 и 305 поиска терапевтического предписания могут осуществляться через пользовательский интерфейс 216 и доступ к файлам данных модуля 210. Затем в состоянии 310 пациента перемещают в положение создания изображения путем его помещения в желобок 116 и запуска позиционирующего механизма для позиционирования 114 для расположения желобка 116 с возможностью закрепления пациента в положении, приближенном к положению формирования изображения. В состоянии 312 в положение формирования изображения также перемещают гентри 102, формирователя (ей) изображения 112 и источник (и) 130 радиационного излучения, а в состоянии 314 определяют осевые параметры формирования изображения посредством рентгеновских лучей при помощи 6D системы 204, использующей устройства 124 измерения внешних параметров, содействующие маркеры 122 и распознаватели 134.
В состоянии 316 формирователь изображения 112 захватывает радиографическое изображение пациента, в которое могут быть внесены поправки модулем 236, как описано выше. В этом варианте выполнения два формирователя изображения 112 и соответствующие источники рентгеновских лучей 130 расположены по существу перпендикулярно друг другу. Таким образом, из ортогональных перспектив получают два независимых радиографических изображения. С этой точки зрения предоставляется более полная информация об изображения, чем в одной перспективе. Следует также отметить, что в определенных вариантах выполнения в состоянии 316 может быть выполнено формирование изображения с нескольких точек зрения для получения дополнительной информации. В состоянии 320 выполняют оценку 320, чтобы определить, завершен ли процесс получения радиографического изображения. После определения результатов этого решения при отрицательном ответе следует продолжение перемещения в состояние 312 и, как указано выше, состояние определения 320 и состояние захвата 316, а при положительном ответе следует состояние 322.
В состоянии 322 6D системой 204 осуществляется измерение параметров внешней среды, как описано выше, для определения относительных положений и направлений различных компонентов системы лучевой терапии 100 через модуль 206 регистрации пациента. В состоянии 324 осуществляют расчеты движения в соответствии с указаниями для точного расположения пациента в заданной позе.
Состояние 326 не является обязательным для всех случаев подачи терапии, однако для данного варианта показано, что в состоянии 326 предписано некоторое движение гентри для расположения гентри 102 в терапевтическом положении, а также некоторое перемещение пациента, например, посредством позиционирующего механизма для позиционирования 114 пациента в состоянии 330 для расположения пациента в заданной позе.
После этих перемещений в состоянии 332 система 6D 204 снова выполняет измерение параметров внешней среды для расчета и анализа найденного положения, чтобы определить в состоянии 336, достигнута ли заданная поза пациента.
Если точная регистрация и расположение пациента не достигнуты, следует состояние 340, в котором рассчитывается и переводится в пригодную систему координат поправочный вектор для дальнейшего перемещения гентри 102 и/или позиционирующего механизма для позиционирования 114 пациента. Если в состоянии 336 получен положительный ответ, например, пациент удовлетворительно расположен в заданной позе, часть лучевой терапии приводится в действие в состоянии 342 в соответствии с предписанием для пациента. Следует отметить, что в некоторых предписаниях для пациента может быть показано несколько частей терапии для сеанс терапии, например осуществление терапии с нескольких направлений, а соответствующие части способа 300 могут многократно повторяться для нескольких предписанных терапевтических частей. Однако для упрощения иллюстрации на фиг.14 описано однократное повторение. Таким образом, после получения терапии в состоянии 342 следует состояние завершения 344, который может включать завершение лечения для этого пациента на этот день или на заданный цикл терапии.
Итак, система лучевой терапии 100 с системой 200 корректировки положения пациента использует измеренную обратную связь для более точного определения позиционирования подвижных компонентов системы 100 и управления им, производя непосредственные измерения этих компонентов. Особое преимущество системы 100 заключается в возможности более точной регистрации пациента во время сеанса подачи терапии, чем это возможно с известными системами и без повторяющийся последовательности формирования радиографического изображения, повторного позиционирования пациента, последующего формирования радиографического изображения и анализа данных. Таким образом, обеспечивается значительное преимущество более точной доставки терапевтической радиации, значительного уменьшения задержки при осуществлении процессов регистрации, формирования изображения и позиционирования и, следовательно, повышается возможная пропускная способность установки и уменьшается потребность в повторном рентгеновском облучении во время сеанса терапии.
В данном документе описаны, и проиллюстрированы, и указаны основные элементы новизны в связи с вариантами выполнения изобретения, не ограничивающие объем изобретения, однако специалисту в области изобретения очевидно, что возможны различные исключения, замены или изменения в форме деталей описанного устройства без отклонений от объема изобретения. Таким образом, объем изобретения ограничен прилагаемой формулой изобретения, а не вышеизложенным описанием.
Реферат
Использование: для позиционирования пациента при радиационной терапии. Сущность заключается в том, что система доставки лучевой терапии содержит гентри; устройство фиксации пациента, выполненное для закрепления пациента относительно устройства фиксации пациента; позиционирующий механизм для позиционирования пациента, выполненный соединенным с устройством фиксации пациента, так чтобы устройство фиксации пациента можно было расположить вдоль осей линейного перемещения и вращения в гентри; насадку лучевой терапии, соединенную с гентри и выборочно доставляющую лучевую терапию вдоль оси пучка; множество устройств измерения внешних параметров для определения местоположения, по меньшей мере, устройства фиксации пациента и насадки; контроллер, получающий информацию о местоположении по меньшей мере устройства фиксации пациента и насадки и передающий команды на перемещение позиционирующему механизму для позиционирования пациента для размещения позиционирующим механизмом пациента в заданной позе относительно оси пучка. Технический результат - увеличение точности и скорости процесса позиционирования пациента. 8 н. и 61 з.п. ф-лы, 20 ил.

Формула
Документы, цитированные в отчёте о поиске
Способ фиксации пациента для проведения ротационной лучевой терапии горизонтальным терапевтическим пучком протонов и устройство кресла для реализации этого способа
Комментарии