Усовершенствование пространственной выборки для сбора данных пэт в виде списка, использующее спланированное перемещение стола/гентри - RU2597074C2
Код документа: RU2597074C2
Чертежи

Описание
Изобретение относится к области диагностической визуализации. Оно находит конкретное применение в использовании спланированного движения стола и/или гентри для того, чтобы получить усовершенствованную пространственную выборку для сбора данных ПЭТ в виде списка. Следует понимать, однако, что оно также находит применение в других устройствах и не обязательно ограничивается применением, указанным выше.
Ядерные устройства визуализации, например сканеры позитронно-эмиссионной томографии (ПЭТ), реконструируют изображения из линий отклика (LORs) в поле обзора (FOV). Значение изображения для вокселя генерируется путем суммирования вклада каждой LOR, которая пересекает воксель. При сборе данных в виде списка события записываются одно за другим в файл списков и считаются независимыми элементами данных, используемыми при реконструкции. В современной клинической визуализации ПЭТ сбор данных ПЭТ обычно осуществляется при фиксированных положениях стола. Как сканер, так и стол остаются неподвижными во время сбора, что приводит к фиксированным расположениям датчиков и неизменяемой пространственной выборке данных по FOV.
В связи с ограниченной FOV ПЭТ, изображение, реконструированное при одном положении, возможно, не в состоянии охватить весь изображаемый объект, например изображение тела целиком. Таким образом, набираются сборы данных при нескольких положениях стола для того, чтобы сформировать целое изображение объекта. Из-за ограниченного размера кристалла сканера ПЭТ сбор данных ПЭТ всегда имеет ограниченную выборку из FOV (как в осевом, так и в поперечном направлениях), которая ограничивает разрешение ПЭТ изображения. Так как стол пациента и гентри сканера обычно остаются неизменными во время сбора данных, то место, где событие может быть собрано, полностью зависит от местоположений кристаллов и геометрий сканеров.
Настоящее изобретение предоставляет новую и усовершенствованную систему и способ, который преодолевает вышеупомянутые проблемы и другие.
В соответствии с одним аспектом предоставляется устройство ПЭТ. Устройство ПЭТ включает в себя детекторную матрицу, включающую в себя отдельные детекторы, которые принимают события излучения из области визуализации. Контроллер перемещения управляет, по меньшей мере, одним: относительным продольным перемещением между опорой для субъекта и детекторной матрицей или круговым перемещением между детекторной матрицей и субъектом. Процессор временной метки присваивает временную метку каждому принятому событию излучения. Буферная память для хранения событий в режиме списка сохраняет события с временной меткой. Процессор верификации событий отбирает одновременно принятые события излучения, местоположения которых для каждой пары соответствующих одновременно принятых событий определяют линию отклика. Процессор реконструкции реконструирует достоверные события в виде изображения области визуализации.
В соответствии с другим аспектом предлагается способ. Способ включает в себя прием событий излучения из области визуализации, управление, по меньшей мере, одним из относительного продольного перемещения между опорой для субъекта и детекторной матрицей и кругового перемещения между детекторной матрицей и субъектом, назначение временной метки каждому принятому событию излучения, сохранение достоверных событий, имеющих временную метку, проверку на одновременно принятые события излучения, определение линии отклика на каждую пару соответствующих одновременно принятых событий; и реконструкцию достоверных событий в виде изображения области визуализации.
В соответствии с другим аспектом предлагается устройство ПЭТ для визуализации. Устройство ПЭТ для визуализации включает в себя детекторную матрицу, которая окружает область визуализации. Один или несколько двигателей перемещают детекторную матрицу, по меньшей мере, по кругу либо продольно. Один или несколько процессоров запрограммированы, чтобы идентифицировать пары событий излучения, одновременно принятых парой детекторов матрицы, определять линию отклика на основе, по меньшей мере, одного из положений, продольного или на окружности, детекторов, которые принимают соответствующие одновременные пары событий, и реконструировать линии отклика в изображение.
Одно из преимуществ заключается в улучшенной пространственной выборке данных ПЭТ.
Другое преимущество заключается в улучшенном разрешении изображения.
Другое преимущество заключается в большем эффективном поле обзора.
Дополнительные преимущества настоящего изобретения станут понятны специалистам в данной области техники по прочтении и изучении следующего подробного описания.
Изобретение может принимать форму различных компонент и вариантов сочетания компонент, а также различных этапов и компоновок этапов. Чертежи имеют целью только проиллюстрировать предпочтительные варианты осуществления и не должны толковаться как ограничивающие данное изобретение.
Фиг. 1 представляет собой графическую иллюстрацию системы визуализации в соответствии с настоящей заявкой.
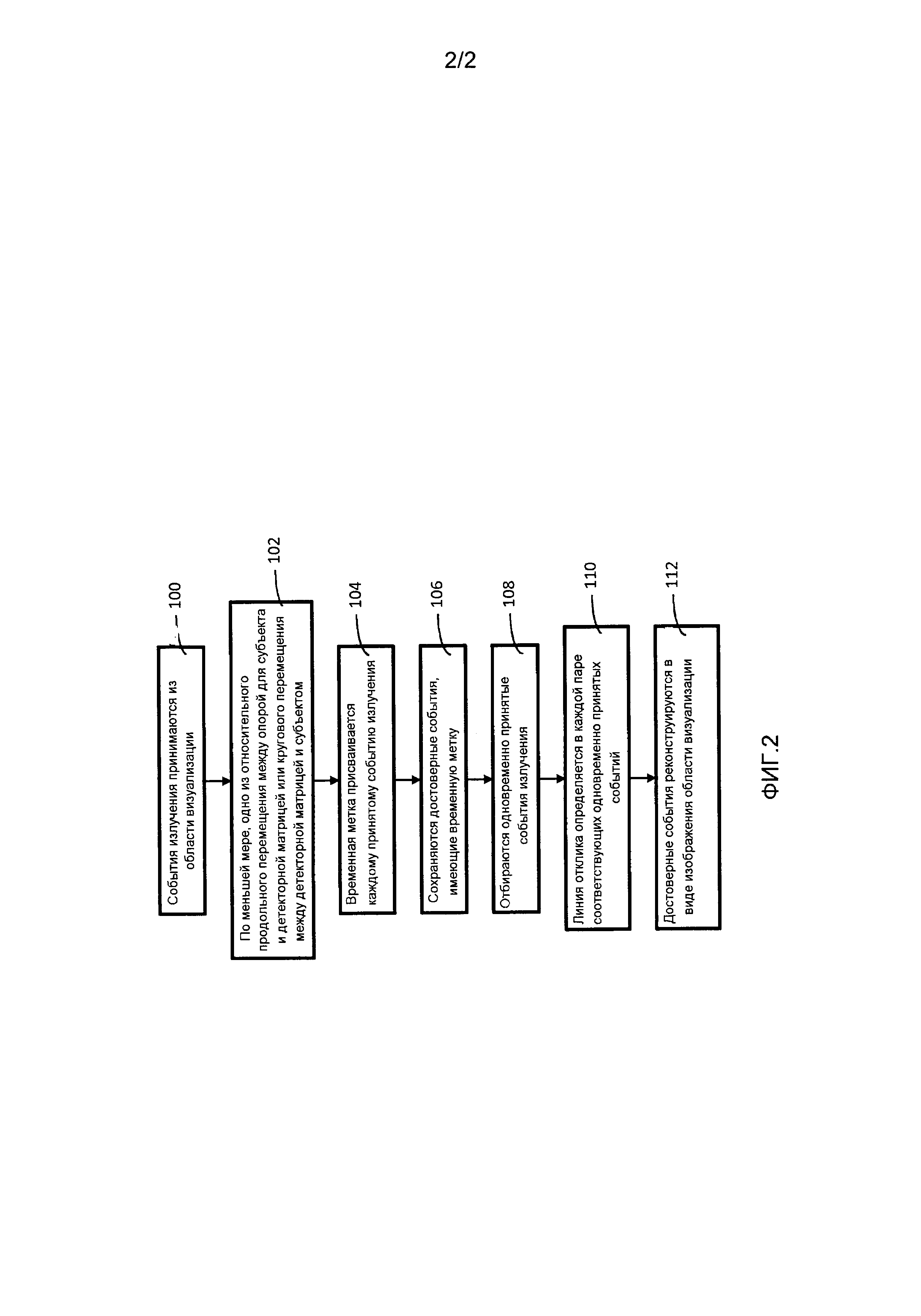
Фиг. 2 представляет собой блок-схему последовательности операций, иллюстрирующую способ обработки изображений в соответствии с настоящей заявкой.
На Фиг. 1 представлена мультимодальная (комплексная) система 10, которая реализует последовательность выполняемых действий, которая использует спланированное перемещение стола/гентри, чтобы собрать события в виде списка при различных местоположениях пространственной выборки для усовершенствования пространственной выборки данных ПЭТ для разрешения изображения. Последовательность выполняемых действий, подробно описанная ниже, использует спланированное перемещение стола/гентри во время сбора данных. При таком подходе каждый кристалл может покрывать различные пространственные местоположения в течение сканирования, что приводит к более точной выборке при сборе данных ПЭТ в поле обзора (FOV). При точном знании о перемещении стола/гентри и хронировании может быть рассчитана линия отклика (LOR) каждого события из списка на основании хронирования события и спланированного перемещения. Перемещение может быть на близкое расстояние, такое как одна или несколько половин длины кристалла. Перемещение стола будет в основном в пользу выборки в осевом направлении, в то время как перемещение гентри по типу вращения может улучшить выборку в поперечном направлении. Кроме того, перемещение стола также может помочь увеличению сканирования осевого FOV и снижению эффекта отбрасывания при коррекции данных.
В соответствии с Фиг. 1 мультимодальная система 10 включает в себя первую систему визуализации, например функциональный модуль, предпочтительно ядерную систему 12 визуализации, и вторую систему визуализации, например анатомический модуль, такой как сканер 14 компьютерной томографии (КТ), магнитно-резонансный (МР) сканер, рентгеновский сканер с рамой С-типа и тому подобные. КТ сканер 14 включает в себя не относящуюся к гентри часть 16. Рентгеновская трубка 18 устанавливается на гентри 20. Туннель 22 определяет область 24 обследования КТ сканером 14. Матрица детекторов 26 излучения располагается на гентри 20 для того, чтобы принимать излучение от рентгеновской трубки 18 после того, как рентгеновские лучи пересекут область 24 обследования. Альтернативно, матрица детекторов 26 может быть расположена на не относящейся к гентри части 16. Конечно, также рассматриваются магнитно-резонансный и другие модули визуализации.
Функциональная или ядерная система 12 визуализации в представленном варианте осуществления включает в себя сканер 30 позитронно-эмиссионной томографии (ПЭТ), который может быть установлен на направляющие 32 для облегчения доступа к пациенту. Разумеется, ОФЭКТ, КТ, рентгенологическая визуализация и другие модули визуализации также могут использоваться. Направляющие 32 проходят параллельно продольной оси опоры для субъекта или стола 34, таким образом, позволяя сканеру 14 КТ и сканеру 12 ПЭТ сформировать замкнутую систему. Двигатель и привод 36 предусматриваются для перемещения сканера 12 ПЭТ в и из закрытого положения и/или перемещения пациента и сканера относительно друг друга. Детекторы 38 расположены вокруг гентри 40, который определяет область 42 обследования. Гентри установлен так, чтобы колебаться или вращаться 44 по дуге, которая составляет, по меньшей мере, расстояние между серединами соседних радиально сопряженных детекторных элементов. Двигатель вращения и привод 46 или тому подобное, обеспечивают колебательное или вращательное движение детекторов относительно пациента. Когда детекторы непрерывно перемещаются, детекторы последовательно располагаются по непрерывному множеству местоположений детекторов. Альтернативно, детекторы могут совершать шаговое движение. Для единообразия, в одном из вариантов осуществления детекторы проводят некоторый интервал времени в каждом положении. Продольный двигатель и привод 48, 48' или тому подобное обеспечивает относительное продольное перемещение между опорой 34 для субъекта и детекторами ПЭТ. В одном из вариантов осуществления продольные двигатели и привод 48 перемещают опору для субъекта. В другом варианте осуществления продольный двигатель и привод 48 перемещает гентри ПЭТ и, таким образом, детекторы. Также рассматриваются комбинированные системы КТ и ПЭТ в одном общем компактном гентри с общей областью обследования.
Со ссылкой на Фиг. 1 опора 34 для субъекта, которая несет субъект, помещается в область 24 обследования сканера 14 КТ. Сканер 14 КТ генерирует данные ослабленного излучения, которые затем используются процессором 60 реконструкции ослабления, чтобы реконструировать данные ослабленного излучения в карту ослабления или анатомическое изображение ослабления, которая хранится в памяти 62 ослабления. Изображение КТ с высоким разрешением можно использовать в качестве карты ослабления. Альтернативно, карта ослабления может иметь относительно низкое пространственное разрешение и контрастность. Опора 34 для пациента перемещает субъект в сканер 12 ПЭТ в положение, которое геометрически и механически определяется как такое же, как визуализированное положение в области 24 визуализации КТ. Для создания изображения по продольно протяженной области пациент помещается в общее начальное положение в сканеры КТ и ПЭТ и перемещается по соответствующей анатомической области. Из-за различных скоростей визуализации у сканеров КТ и ПЭТ скорости продольного перемещения могут быть различными. Перед тем, как начинается цикл визуализации ПЭТ, субъекту вводится радиофармацевтический препарат. При ПЭТ сканировании, пары гамма-лучей вызываются событием позитронной аннигиляции в области 42 визуализации и распространяются в противоположных направлениях. Когда гамма-луч ударяет в детекторы 38, регистрируются местоположение бомбардируемого детекторного элемента и время удара. Процессор 52 инициирования и временной метки отслеживает каждый детектор 38 на предмет всплеска энергии, например интегрированной зоны под импульсом, характерной для энергии гамма-лучей, сгенерированных радиоактивным медицинским препаратом. Процессор 52 инициирования и временной метки сверяется с часами 54 и присваивает каждому обнаруженному событию гамма-луча время приема переднего фронта импульса и во время-пролетном сканере время пролета (TOF). В РЕТ-визуализации временная метка, оценка энергии и местоположение детектора, в первую очередь, используются процессором 56 верификации событий для определения наличия одновременного события. Принятые пары одновременных событий определяют линии отклика (LOR). После того как пара событий верифицирована процессором 56 верификации событий, LOR передается в буферную память 58 для хранения событий с их временными метками и местоположениями детекторов конечных точек хранятся в буферной памяти 58 для хранения событий, как данные о событиях.
Опора 34 для субъекта и/или гентри ПЭТ непрерывно или пошагово перемещаются относительно друг друга для генерации наборов данных ПЭТ в виде списка, которые содержат события, связанные с соответствующей им информацией о местоположении детекторов, которые обнаруживают парные фотоны. Это позволяет каждому детектору покрывать непрерывное множество продольных пространственных местоположений во время цикла визуализации, что приводит к более хорошей выборке сборов данных ПЭТ в продольном или направлении z. Также рассматривается поэтапное продвижение с малыми продольными приращениями, например меньшими, чем продольное расстояние между детекторами. Детекторы также перемещаются по кругу непрерывно или аналогичными малыми шагами. Скорости продольного и вращательного движений могут быть различными. Чтобы достичь этого, система сконфигурирована с процессором 64 перемещения, который управляет относительным перемещением опоры 34 для субъекта и/или гентри 40. Процессор 64 перемещения планирует хронирование и продольную и вращательную траекторию перемещения опоры 34 для субъекта и/или гентри 40, включая расстояние перемещения, скорость, направление и тому подобное. Следует иметь в виду, что во время сбора данных как опора 34 для субъекта, так и гентри 40 могут перемещаться, опора 34 для субъекта может перемещаться сама по себе, или гентри 40 может перемещаться по кругу сам по себе. В одном из вариантов осуществления процессор 64 перемещения предоставляет текущее намеченное продольное и окружное местоположение, например смещение от начального или опорного местоположения, детектора процессору 52 инициирования/временной метки, который вносит поправки в местоположение детектора, обнаруживающего каждое событие соответственно. В другом варианте осуществления блок 66 сбора данных о перемещении измеряет продольное местоположение опоры 34 для субъекта и/или гентри и местоположение детекторов на окружности. Достоверные данные о перемещении, включающие в себя продольное местоположение, местоположение на окружности и т.п., измеряются одним или несколькими датчиками 66L, 66C, которые измеряют относительное продольное местоположение опоры 34 для субъекта и/или гентри и местоположение детекторов на окружности соответственно. В одном из вариантов осуществления данные о перемещении используются процессором 68 репозиционирования данных о событиях, который корректирует или корректирует траекторию LOR для каждого события из списка, например сдвигает конечные или точки обнаружения каждой LOR, на основании геометрии сканера и информации о перемещении.
Процессор 70 реконструкции реконструирует местоположение исправленных или скорректированных LOR в вид изображения субъекта с использованием карты ослабления или изображения для коррекции ослабления. В одном из вариантов осуществления используется алгоритм реконструкции в виде списка. Процессор 70 реконструкции реконструирует вид изображения с учетом скорректированных или исправленных LOR, генерируя значение изображения для каждого вокселя, учитывая вклад каждой исправленной или скорректированной LOR, которая пересекает воксель. Воксель может иметь форму прямоугольной призмы, например куба, шарика или тому подобное. Реконструированное изображение сохраняется в памяти 72 для хранения изображений и отображается для пользователя на устройстве 74 отображения, распечатывается, сохраняется для последующего использования и тому подобное. В одном из вариантов осуществления процессор 76 объединения объединяет функциональное ПЭТ изображение с анатомическим изображением ослабления.
В одном из вариантов осуществления данные о событиях собираются в формате списка. Записывание соответствующих свойств (координат детектора, временной метки, и т.д.) каждого обнаруженного события в список стало известно как сбор и хранение данных в виде списка. Формат списка также включает в себя или корректируется данными о перемещении для данных о каждом событии так, что каждая LOR каждого события из списка может быть исправлена или скорректирована на основе геометрии сканера и данных о перемещении. Это позволяет перемещать опору 34 для субъекта и/или гентри 40 непрерывно, небольшими шагами или подобным образом во время сбора данных. Посредством накопления данных с информацией о местоположении, которая собирается на более мелкой сетке, чем традиционное расстояние между детекторными элементами, разрешение системы и результирующее изображение ПЭТ может быть улучшено.
Инициирующий процессор 52, процессор 56 верификации событий, процессор 60 реконструкции ослабления, процессор 70 реконструкции и процессор 64 перемещения включают в себя универсальный или другой процессор, например микропроцессор или другое программное обеспечение, управляемое устройством, выполненным с возможностью исполнять программы для реконструкции изображения для выполнения операций, описанных более подробно ниже. Типично программы для реконструкции изображения выполняются на материальной памяти или машиночитаемом носителе для выполнения процессором. Виды машиночитаемых носителей включают в себя память, такую как жесткий диск, CD-ROM, DVD-ROM и тому подобное. Также предполагаются другие реализации процессора. Контроллеры дисплея, специализированные микросхемы (ASIC), FPGA и микроконтроллеры являются иллюстративными примерами других типов компонент, которые могут быть применены для обеспечения функций процессора. Варианты осуществления могут быть реализованы с использованием программного обеспечения для выполнения процессором, аппаратными средствами или некоторым их сочетанием.
В одном из вариантов осуществления контроллер 64 перемещения управляет опорой 34 для субъекта для непрерывного перемещения вдоль продольной оси опоры 34 для субъекта. Контроллер 64 перемещения управляет расстоянием, направлением и скоростью опоры 34 для субъекта. Перемещение опоры 34 для субъекта является непрерывным, но также рассматривается, что перемещение осуществляется сериями коротких шагов. Таким же образом, скорость опоры 34 для субъекта является предпочтительно постоянной, но также рассматривается, что скорость опоры 34 для субъекта изменяется, на основании приложения по визуализации. Например, опора 34 для субъекта может двигаться с непостоянной скоростью для того, чтобы добиться большей детализации для некоторых представляющих интерес областей, чтобы вводить поправку на вариации выборки в начале и конце продольного перемещения, и тому подобное. Следует иметь в виду, что перемещение опор 34 для субъекта управляется таким образом, что скорость отсчета является достаточной для ПЭТ визуализации. Например, контроллер 64 перемещения управляет перемещением опоры 34 для субъекта, чтобы перемещать со скоростью 9 сантиметров в минуту, которая обеспечивает достаточные или событийные подсчеты для получения изображений. Непрерывное перемещение еще больше уменьшает общее время получения изображения. Поскольку нет больше необходимости для перемещения опоры для субъекта и/или гентри сериями коротких шагов, время для получения изображения снижается. Например, получение изображения с использованием непрерывного перемещения гентри и/или опоры для субъекта выполняется в два раза быстрее традиционного получения изображения. Время получения изображения также снижается путем перемещения опоры 34 для субъекта с непостоянной скоростью через области, не представляющие интереса. Например, скорость субъекта может быть увеличена для областей, которые не представляют интереса для клинициста, чтобы сократить время получения изображения.
Контроллер 64 перемещения также управляет гентри 40, чтобы выполнять вращение или колебание в направлении вдоль окружности либо непрерывно, либо сериями коротких шагов. Как правило, вращение имеет место только по дуге, которая стягивает приблизительно расстояние между серединами соседних детекторов, граничащими по кругу. Как описано выше, контроллер 64 перемещения управляет расстоянием, направлением и скоростью гентри 40. Контроллер 34 перемещения планирует хронирование и траекторию перемещения опоры 34 для субъекта и/или гентри 40, учитывая расстояние перемещения и направление перемещения для каждой последовательности визуализации ПЭТ.
Блок 66 сбора данных о перемещении измеряет фактические относительные продольные местоположения опоры 34 для субъекта и/или гентри 40 и местоположение гентри на окружности и генерирует данные о перемещении, указывающие на таковое. В одном из вариантов осуществления данные о перемещении включают в себя расстояние перемещения, направление, скорость и тому подобное, используются для создания модели движения, которая используется для корректировки LOR. В другом варианте осуществления блок 66 сбора данных о перемещении также записывает временные метки с местоположениями измерений данных о событиях, которые используются процессором 68 репозиционирования данных о событиях для того, чтобы соотнести поправки к местоположениям с LOR. Например, из данных о движении процессор 68 репозиционирования данных о событиях определяет положение, время, и смещение каждого детектора для каждого события из списка обнаруженных. Местоположение обычно измеряется как величина смещения от опорного местоположения. Процессор 68 репозиционирования данных о событиях использует эту информацию для корректировки или исправления LOR каждого события из списка на основании геометрии сканера и детектора. Величины смещений затем используются для того, чтобы физически сместить, переориентировать или скорректировать LOR.
Фиг. 2 иллюстрирует способ обработки изображения. На этапе 100 события излучения принимаются из области визуализации. На этапе 102 управляют, по меньшей мере, одним относительного продольного перемещения между опорой для субъекта и детекторной матрицей или кругового перемещения между детекторной матрицей и субъектом. На этапе 104 временная метка присваивается каждому принятому событию излучения. На этапе 106 сохраняются достоверные события, имеющие временную метку. На этапе 108 отбираются одновременно принятые события излучения. На этапе 110 линия отклика определяется в каждой паре соответствующих одновременно принятых событий. На этапе 112 достоверные события реконструируются в виде изображения области визуализации.
Изобретение было описано со ссылкой на предпочтительные варианты осуществления. На основе прочтения и понимания предшествующего подробного описания могут быть созданы другие модификации и изменения. Предполагается, что изобретение предусматривает включение в себя всех таких модификаций и изменений постольку, поскольку они входят в объем прилагаемой формулы изобретения или ее эквивалентов.
Реферат
Использование: для позитронно-эмиссионной томографии (ПЭТ). Сущность изобретения заключается в том, что устройство ПЭТ включает в себя детекторную матрицу, включающую в себя отдельные детекторы, которые принимают события излучения из области визуализации. Контроллер перемещения управляет, по меньшей мере, одним из относительного продольного перемещения между опорой для субъекта и детекторной матрицей или кругового перемещения между детекторной матрицей и субъектом. Процессор временной метки времени присваивает временную метку каждому принятому событию излучения. Буферная память для хранения событий в режиме списка сохраняет события с временной меткой. Процессор верификации событий отбирает одновременно принятые события излучения, местоположения которых для каждой пары соответствующих одновременно принятых событий определяют линию отклика. Процессор реконструкции реконструирует достоверные события в виде изображения области визуализации. Технический результат: улучшение пространственной выборки данных ПЭТ, а также улучшение разрешения изображения и обеспечение большего эффективного поля обзора. 2 н. и 13 з.п. ф-лы, 2 ил.
Формула
детекторную матрицу (38), включающую в себя отдельные детекторы, выполненные с возможностью принимать события излучения из области визуализации (42);
контроллер (64) перемещения, запрограммированный управлять, по меньшей мере, одним из относительного продольного перемещения между опорой (34) для субъекта и детекторной матрицей (38) и относительного кругового перемещения между опорой (38) для субъекта и детекторной матрицей (34);
процессор (52) временной метки, запрограммированный присваивать временную метку каждому принятому событию излучения;
буферную память (58) для хранения событий в режиме списка, выполненную с возможностью сохранять события с временной меткой;
процессор (56) верификации событий, запрограммированный отбирать одновременно принятые события излучения и местоположения, в которых каждая пара соответствующих одновременно принятых событий определяет линию отклика;
процессор (68) репозиционирования данных о событиях, запрограммированный определять текущее продольное и окружное местоположение детекторов, которые принимают события излучения, и настраивать соответствующие линии ответов принятых событий на основе определенного текущего продольного и окружного местоположения детекторов, которые принимают события излучения; и
процессор (70) реконструкции, запрограммированный реконструировать одновременные события в виде изображения области (42) визуализации.
блок (66) сбора данных о перемещении, запрограммированный измерять текущее относительное продольное местоположение между опорой (34) для субъекта и детекторной матрицей (38) и текущее относительное окружное местоположение между детекторной матрицей (38) и опорой (34) для субъекта.
принимают события излучения из области (42) визуализации;
управляют, по меньшей мере, одним из относительного продольного перемещения между опорой (34) для субъекта и детекторной матрицей (38) и относительного кругового перемещения между детекторной матрицей (38) и опорой (34) для субъекта;
присваивают временную метку каждому принятому событию излучения;
определяют текущее продольное и окружное местоположение детекторов, которые принимают события излучения;
сохраняют события, имеющие временную метку;
проверяют на одновременно принятые события излучения;
определяют линии отклика между местоположениями пары детекторных элементов, которые приняли одновременно принятые события;
настраивают линии ответов на основе определенного текущего продольного и окружного местоположения детекторов, которые принимают события излучения; и
реконструируют настроенные линии ответов в виде изображения области (42) визуализации.
присваивают временную метку с помощью процессора (52) временной метки текущему продольному и окружному местоположению детектора, который принял событие излучения.
измеряют текущее относительное продольное местоположение опоры (34) для субъекта и детекторной матрицы (38) и текущее относительное окружное местоположение детекторной матрицы (38) и опоры (34) для субъекта.
снижают время получения изображения посредством настройки одного или более параметров сканирования.
Комментарии