Гентри для системы формирования изображения - RU2543494C2
Код документа: RU2543494C2
Чертежи














Описание
Область техники
Настоящее изобретение относится к системам формирования изображения и находит конкретное применение при формировании изображений при компьютерной томографии (CT). Однако оно также может использоваться для других медицинских и не медицинских применений при формировании изображений.
Предшествующий уровень техники
Сканер компьютерной томографии (CT) обычно содержит рентгеновскую трубку и детекторную матрицу, которая обнаруживает излучение, испускаемое рентгеновской трубкой. Рентгеновская трубка и детекторная матрица устанавливаются на вращающейся раме, которая вращается около области исследования вокруг оси z. Вращающаяся рама поддерживается с возможностью вращения с наклонной рамой через подшипник и т.п. Наклонная рама поддерживается неподвижной рамой и наклоняется вокруг оси x и вдоль оси z. Неподвижная рама крепится к полу в комнате для исследования.
К сожалению, различные силы, действующие на вращающуюся раму (например, гравитационные, радиальные и т.д.), имеют тенденцию вызывать напряжения, способствующие уменьшению срока службы и ухудшению рабочих характеристик различных компонентов, таких как подшипник, используемый для соединения вращающейся рамы с наклонной рамой. Кроме того, относительно гибкий подшипник часто соединяется с относительно жестко присоединенными вращающейся и наклонной рамами. В результате может происходить деформация дорожки качения, которая может повлечь за собой напряжение в дорожке качения при вращении вращающейся рамы. Величина такого напряжения обычно пропорциональна деформации и получившейся при монтаже жесткости. Дополнительно, монтажная поверхность может меняться по точности от сканера к сканеру, что может приводить к большому разбросу рабочих характеристик подшипника.
Различные силы, действующие на вращающуюся раму, а также вибрация, также стремятся вызвать дисбаланс вращающейся рамы. Такой дисбаланс может заставить вращающуюся раму колебаться, из-за чего может изменяться центр поля зрения во время сканирования, что может ухудшать качество изображения. Степень колебания основывается на различных факторах, таких как угловая скорость вращающейся рамы, жесткость опорной конструкции и т.д. Жесткость сканеров, сконфигурированных для наклона, имеет тенденцию снижаться за счет доступности мест, в которых неподвижная рама может прикрепляться к полу в помещении для исследования, что может приводить к увеличению колебания.
При пропадании электропитания в то время, когда вращающаяся рама вращается, обычно желательно контролировать остановку вращения вращающейся гентри. Традиционные системы имели фрикционный тормоз двигателя и относительно высокое трение вращения, которое при пропадании электропитания должно снизить скорость вращения вращающейся рамы до полной остановки. Более современный сканер имеет повышенные угловые скорости, подшипники с более низким трением и бесконтактные системы движения ротора, которые приводят к повышенным временам торможения при пропадании электропитания. К сожалению, фрикционное торможение двигателя недоступно, когда двигатель бесконтактный. Кроме того, в подшипниках с низким трением время движения по инерции может быть чрезмерно большим, если только не используется энергия ветра (воздушное трение), чтобы замедлить вращающуюся раму до полной остановки.
Сущность изобретения
Изложенные здесь варианты направлены на решение упомянутых выше и/или других проблем.
В соответствии с одним аспектом система формирования изображения содержит вращающуюся раму, которая вращается около области исследования вокруг оси z, вторую раму и опору, которая соединяет с возможностью вращения вращающуюся раму со второй рамой. Одна из вращающейся рамы или второй рамы подвижно соединяется с опорой и другая вращающаяся рама или вторая рама жестко соединяется с опорой.
В соответствии с другим аспектом система формирования изображения содержит вращающуюся раму, которая вращается около области исследования вокруг оси z, наклонную раму, наклоняемую вдоль оси z, причем вращающаяся рама соединяется с возможностью вращения с наклонной рамой, и неподвижную раму, причем наклонная рама соединяется с неподвижной рамой с возможностью наклона. Элемент жесткости рамы обеспечивает конструктивную опору для вращающейся и наклонной рам вдоль поперечных осей.
В соответствии с другим аспектом система формирования изображения содержит вращающуюся раму, которая вращается около области исследования вокруг оси z, и вторую раму, которая поддерживает вращающуюся раму с возможностью вращения. Вращающаяся рама соединяется со второй рамой посредством бесконтактного подшипника и управляется бесконтактным механизмом. Тормозящий компонент избирательно применяет торможение к вращающейся раме.
В соответствии с другим аспектом система содержит вращающуюся гентри, которая вращается около области исследования вокруг оси z, и неподвижную гентри. Бесконтактный подшипник с текучей средой соединяет с возможностью вращения вращающуюся гентри и неподвижную гентри. Бесконтактный подшипник содержит первый участок, прикрепленный к вращающейся гентри, и второй участок, прикрепленный к неподвижной гентри. Второй участок сцепляется с первым участком, чтобы тормозить вращающуюся гентри.
В соответствии с другим аспектом способ содержит этап соединения с возможностью вращения вращающейся рамы системы формирования изображения и второй рамы системы формирования изображения. Одна из вращающейся рамы или второй рамы системы формирования изображения подвижно соединяется с опорой системы формирования изображения, и другая вращающаяся рама или вторая рама системы формирования изображения жестко соединяется с опорой системы формирования изображения.
В соответствии с другим аспектом способ содержит обеспечение боковой опоры для вращающейся и наклонной рам системы формирования изображения через элемент жесткости рамы. Наклонная рама соединяется с неподвижной рамой системы (100) формирования изображения с возможностью наклона и наклоняется вдоль оси z, а вращающаяся рама соединяется с наклонной рамой с возможностью вращения и вращается вокруг оси z.
В соответствии с другим аспектом способ содержит использование первого участка бесконтактного подшипника системы формирования изображения, чтобы тормозить вращающийся второй участок бесконтактного подшипника и, следовательно, вращающуюся гентри, соединенную со вторым участком. Бесконтактный подшипник соединяет вращающуюся гентри системы формирования изображения с неподвижной гентри системы формирования изображения.
Краткое описание чертежей
Изобретение может быть выполнено из различных компонентов и в различных компоновках и содержать различные этапы и этапы компоновки. Чертежи служат только для иллюстрации предпочтительных вариантов осуществления и не должны считаться ограничением изобретения, на чертежах:
Фиг. 1 изображает систему формирования изображения;
Фиг. 2 изображает пример опоры подшипника;
Фиг. 3-8 изображают пример элемента жесткости гентри;
Фиг. 9-11 изображают пример тормозящего компонента;
Фиг. 12-14 изображают пример бесконтактного подшипника;
Фиг. 15-16 изображают пример блока подшипника и тормозной колодки;
Фиг. 17-18 изображают пример крепления блока подшипника;
Фиг. 19-21 изображают примеры способов.
Описание вариантов воплощения изобретения
На фиг. 1 изображен сканер или система 100 формирования изображения, которая содержит неподвижную раму 102, наклонную раму 104 и вращающуюся раму 106. Неподвижная рама 102 крепится к полу в помещении для исследования. Наклонная рама 104 крепится к неподвижной раме 102 с возможностью наклона и сконфигурирована для наклона около оси x и вдоль оси z. В одном варианте осуществления наклонная рама 104 сконфигурирована для наклона вверх до тридцати (30) градусов в обоих направлениях вдоль оси z. Вращающаяся рама 106 поддерживается наклонной рамой 104 с возможностью вращения через опору 108, которая содержит подшипник, такой как шарикоподшипник, воздушный подшипник, магнитный подшипник и т.д. Вращающаяся рама 106 вращается около области исследования вокруг оси z. В некоторых вариантах осуществления наклонная рама 104 отсутствует и вращающаяся рама 106 поддерживается неподвижной рамой 102 с возможностью вращения.
Как описано ниже более подробно, в одном неограничивающем варианте осуществления опора 108 содержит участок статора и участок подшипника, который соединен с участком статора через опору подвижного подшипника. Опора подвижного подшипника позволяет одной стороне опоры быть, в целом, подвижно соединенной с другой стороны опоры, которая обычно более жесткая. Например, участок подшипника может обычно формировать более подвижную сторону, а участок статора может формировать обычно более жесткую сторону или наоборот. Такая опора подвижного подшипника может обеспечивать общую жесткость, в то же время снимая локализованные рабочие напряжения на подшипнике.
Также, как описано ниже более подробно, в одном неограничивающем варианте осуществления система 100 содержит, по меньшей мере, один элемент 110 жесткости, который может уменьшать движение вдоль направлений осей x и y относительно конфигурации, в которой элемент 110 жесткости отсутствует. Это обеспечивает уменьшение движения, при котором наклонная рама 104 находится в ненаклонном вертикальном положении или в наклонном положении.
Как далее описано более подробно, в одном неограничивающем варианте осуществления, тормозящий компонент 112 используется для замедления и/или остановки вращающейся рамы 106 при вращении вокруг оси z. Контроллер 114 управляет тормозящим компонентом 112. Тормозящий компонент 112 позволяет выполнять торможение в обычных и/или аварийных рабочих условиях. Для примера, когда система 100 сконфигурирована с воздушным подшипником и отключается электропитание системы, тормозящий компонент 112 может использоваться для уменьшения и остановки вращения относительно подшипника качения.
Источник 116 излучения, такой как рентгеновская трубка, соединяется и вращается вместе с вращающейся рамой 106 около области исследования. Источник 116 излучения испускает излучение, которое пересекает область исследования. Матрица 118 детекторов образует угловую дугу противоположного источнику 116 излучения напротив области исследования. Матрица 118 детекторов содержит одну или более последовательностей чувствительных к излучению пикселей, которые продолжаются в поперечном направлении. Чувствительные к излучению пиксели обнаруживают излучение, пересекающее область исследования, и, соответственно, создают индицирующий его сигнал.
Преобразователь 120 преобразует сигналы и создает объемные данные изображения, показывающие область исследования. Опора для пациента (не показана), такая как кушетка, поддерживает пациента в области исследования. Опора для пациента может двигаться вдоль оси x, y и/или z. Универсальная компьютерная система служит в качестве пульта 122 оператора, который содержит устройства ввода и пригодные для считывания человеком устройства вывода, такие как клавиатура и/или "мышь" и дисплей и/или принтер. Программное обеспечение, резидентное в компьютерной системе, управляет работой системы 100.
Как кратко обсуждалось выше, в одном неограничивающем варианте осуществления опора 108 содержит участок статора и участок подшипника, который соединен с участком статора через опору подвижного подшипника. На фиг. 2 изображен неограничивающий пример такой опоры.
В данном примере опора 108 содержит статор 202, первый участок 204 подшипника 206 и опору 208 подшипника, расположенную между ними. Опора 208 подшипника соединяет статор 202 и первый участок 204 подшипника 206. Первый участок 204 подшипника 206 подвижно соединяется с опорой 208 подшипника. Ротор 210 крепится ко второму участку 212 подшипника 206. Ротор 210 соединяется со статором 202 через подшипник 206 с возможностью вращения. Статор 202 жестко крепится к наклонной раме 104 и обеспечивает относительно жесткую общую опору для ротора 210.
В изображенном варианте осуществления опора 208 подшипника содержит множество элементов или изогнутых элементов 214. Как показано на чертеже, изогнутые элементы 214 разнесены друг от друга c находящейся между ними областью, свободной от материала. В данном примере, по меньшей мере, один из изогнутых элементов 214 является индивидуальным элементом, прикрепленным к статору 202 и подшипнику 206. Такой изогнутый элемент 214 может крепиться винтом, болтом, заклепкой, клеем и/или другим соответствующим механизмом крепления. В другом варианте осуществления два или более изогнутых элементов 214 являются частью единого элемента, прикрепленного к статору 202 и подшипнику 206. В еще одном варианте осуществления, по меньшей мере, один из изогнутых элементов 214 является частью статора 202, подшипника 206 или статора 202 и подшипника 206 вместе. Изогнутый элемент 214 может быть выполнен из металла, пластмассы или другого подходящего материала.
Изогнутые элементы 214 позволяют получать локализованный изгиб на подшипнике 206. В одном случае поднабор (например, один или более) изогнутых элементов 214 может изгибаться, сдвигаться, сжиматься, растягиваться и/или иначе физически деформироваться, основываясь на связи между первым и вторым участками 204, 212 подшипника 206, нагрузках, силах и/или чем-либо ином. Такая деформация обычно основана на геометрической неполноте подшипника 206, нагрузке ротора, гравитационных силах, других силах и т.д. и может снижать локализованные рабочие напряжения относительно конфигурации, в которой опора 208 подшипника более жесткая или твердая. Это может увеличивать срок службы подшипника 206 и позволяет иметь подшипник с менее жесткими допусками, что может снижать затраты комплексной системы.
Для примера, дорожки качения и шарики подшипника 206 обычно являются относительно жесткими структурами, которые обрабатываются на станке в пределах заданного допуска и основаны на технических ограничениях обрабатывающих инструментов. Например, геометрия дорожек качения и шариков далека от совершенства. Кроме того, нагрузки ротора могут вызвать деформации дорожек качения, и монтажные поверхности подшипника вносят степень неточности. Несовершенная геометрия, деформации и неточности вносят меняющиеся локализованные рабочие напряженности. В целом, величина напряженности пропорциональна степени жесткости или прочности. Изогнутые элементы 214 подвижны и могут деформироваться и, таким образом, снижать такие рабочие напряженности. Как отмечалось выше, жесткое соединение между статором 202 и наклонной рамой 104 обеспечивает общую жесткость для вращающейся рамы 106.
Конечно, размеры изогнутых элементов 214 и/или свободных от материала областей в изображенном примере предоставляются для разъяснения. В других вариантах осуществления рассматриваются другие размеры.
Как кратко обсуждалось выше, в одном неограничивающем варианте осуществления элемент 110 жесткости используется в системе 100. На фиг. 3-8 изображен пример элемента 110 жесткости гентри.
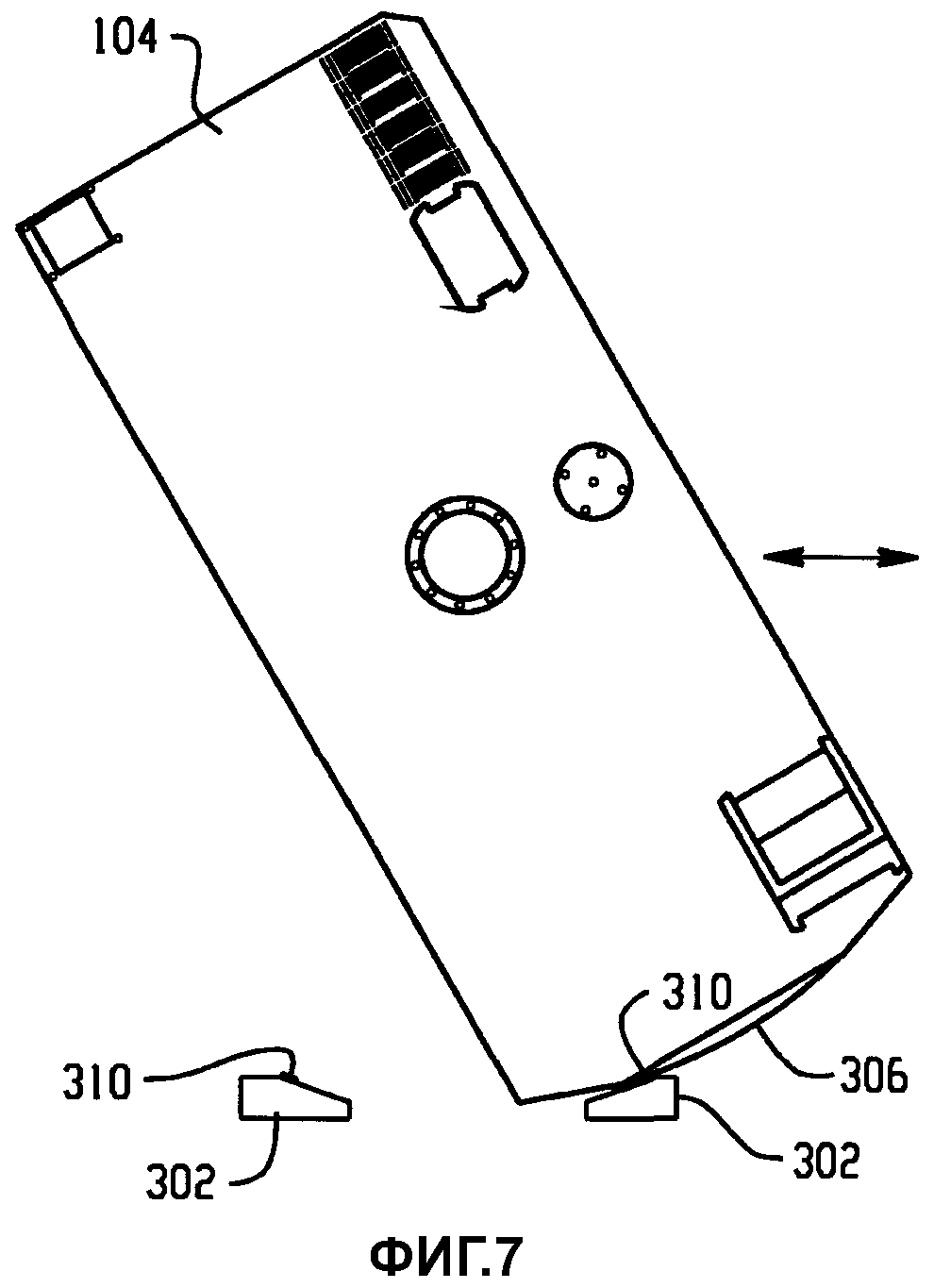
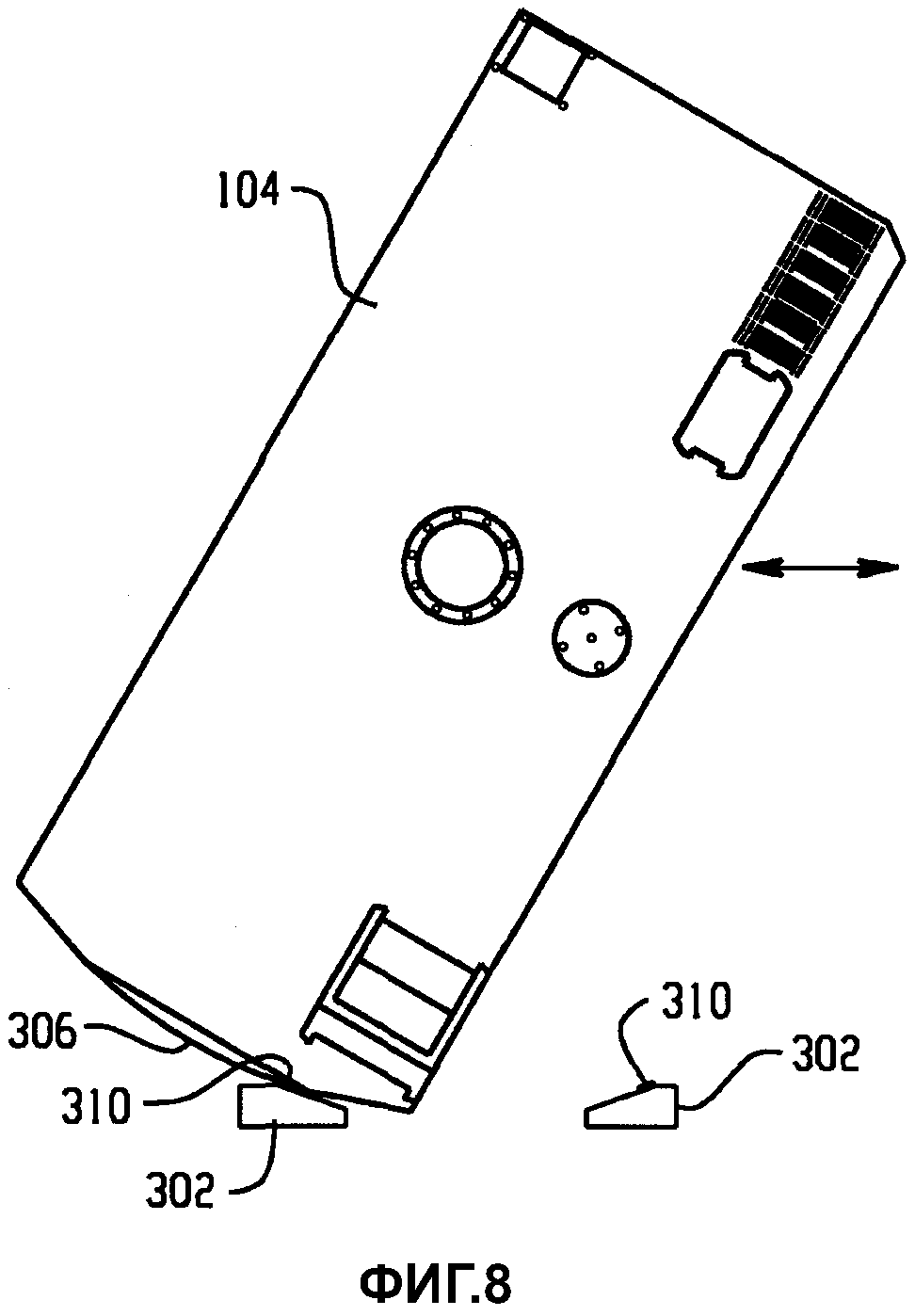
Со ссылкой сначала на фиг. 3, элемент 110 жесткости гентри содержит первый участок 302, который крепится к основанию 304 неподвижной рамы 102, и выступающий участок 306, выступающий из наклонной рамы 104 вдоль оси y в направлении основания 304. Первый участок 302 крепится к основанию через крепежные средства, такие как винты, болты, заклепки и т.п., и содержит, по меньшей мере, две направляющие 310, которые образуют углубления или канал 308, внутри которого скользит выступающий участок 306. Как изображено на фиг. 4, выступающий участок 306 проходит вдоль оси z от переднего участка 402 наклонной рамы 104 к заднему участку 404 наклонной рамы 104.
На фиг. 5 представлен пример первого участка 302 элемента 110 жесткости гентри. Изображенный первый участок 302 содержит, в целом, неподвижную область 502, которая неподвижно устанавливается на основание 304, и свободно плавающую область 504. Неподвижные и свободно плавающие области 502, 504 отделяются друг от друга областью 508, свободной от материала, и объединяются в области 506 основания. Крепежное 510 средство проходит через область 504, свободную от материала, и крепится к неподвижной области 502.
Крепежное 510 средство может содержать пружину или другой компонент, который позволяет крепежному 510 средству прикрепляться с заранее заданной предварительной нагрузкой. Предварительная нагрузка может определяться, основываясь на применении и/или чем-либо ином. В одном случае такая предварительная нагрузка достигается посредством пружины и т.п. Например, крепежное 510 средство может быть винтом с пружиной, где натяжение винта сжимает пружину, тем самым нагружая пружину.
В одном случае предварительная нагрузка заставляет свободно плавающую область 504 двигаться в направлении неподвижной области 502, но позволяет свободно плавающей области 504 изгибаться или двигаться от неподвижной области 502, когда сила, имеющая большую величину, чем предварительная нагрузка, прикладывается к свободно плавающей области 504 в направлении от неподвижной области 502. Например, когда выступающий участок 306 на наклонной раме 104 находится между направляющими 310, свободно плавающий участок 504 принуждается двигаться относительно выступающего участка 306, который облегчает снижение движения (например, благодаря колебанию вращающейся рамы) выступающего участка 306 и, следовательно, наклонной и вращающейся рам 104, 106 вдоль осей x и y.
В одном случае предварительная нагрузка такова, что неподвижный участок 502 и свободно плавающий участок 504 всегда находятся в контакте в худшем случае дисбаланса ротора. В данном случае свободно плавающий участок 504 движется от неподвижного участка 502 или к нему, в зависимости от локальной толщины выступающего участка 306. Это позволяет наклонной раме 104 свободно перемещаться в поперечном направлении по наклонной опоре, чтобы компенсировать ошибки, связанные с плоскостностью поверхности и перпендикулярностью поверхности выступающего участка 306 и/или неподвижного участка относительно оси наклона.
На фиг. 6-8 изображены виды сбоку участка системы 100, содержащей наклонную раму 104 и элемент 110 жесткости. Как видно на чертеже, в одном варианте осуществления используются, по меньшей мере, два элемента 110 жесткости гентри, по одному с каждой стороны системы вдоль оси z. На фиг. 6 изображена наклонная рама 104 в вертикальном положении. В этом положении выступающий участок 306 находится внутри направляющих 310 обоих элементов 110 жесткости гентри.
На фиг. 7 наклонная рама 104 наклоняется в первом направлении вдоль оси z. По мере того как наклонная рама 104 движется из вертикального положения (фиг. 6) к данному изображенному на чертеже положению, выступающий участок 306 скользит по направляющим 310, непрерывно скользя по первой из двух направляющих 310, покидая в конечном счете вторую из двух направляющих 310. На фиг. 8 изображена наклонная рама 104, наклоненная в противоположном направлении вдоль оси z. Использование двух направляющих 310, как изображено, позволяет, по меньшей мере, одной направляющей 310 всегда предоставлять дополнительную боковую опору.
Следует понимать, что в другом варианте осуществления используется одиночная направляющая 310. В другом варианте осуществления может использоваться больше одного элемента 110 жесткости. Соответствующие места расположения элемента 110 жесткости включают в себя одну из ближайших сторон неподвижной рамы 102, приблизительно в центральной области наклонной рамы 104 и/или где-либо еще. Следует также понимать, что для привода в наклонное положение могут использоваться ролики.
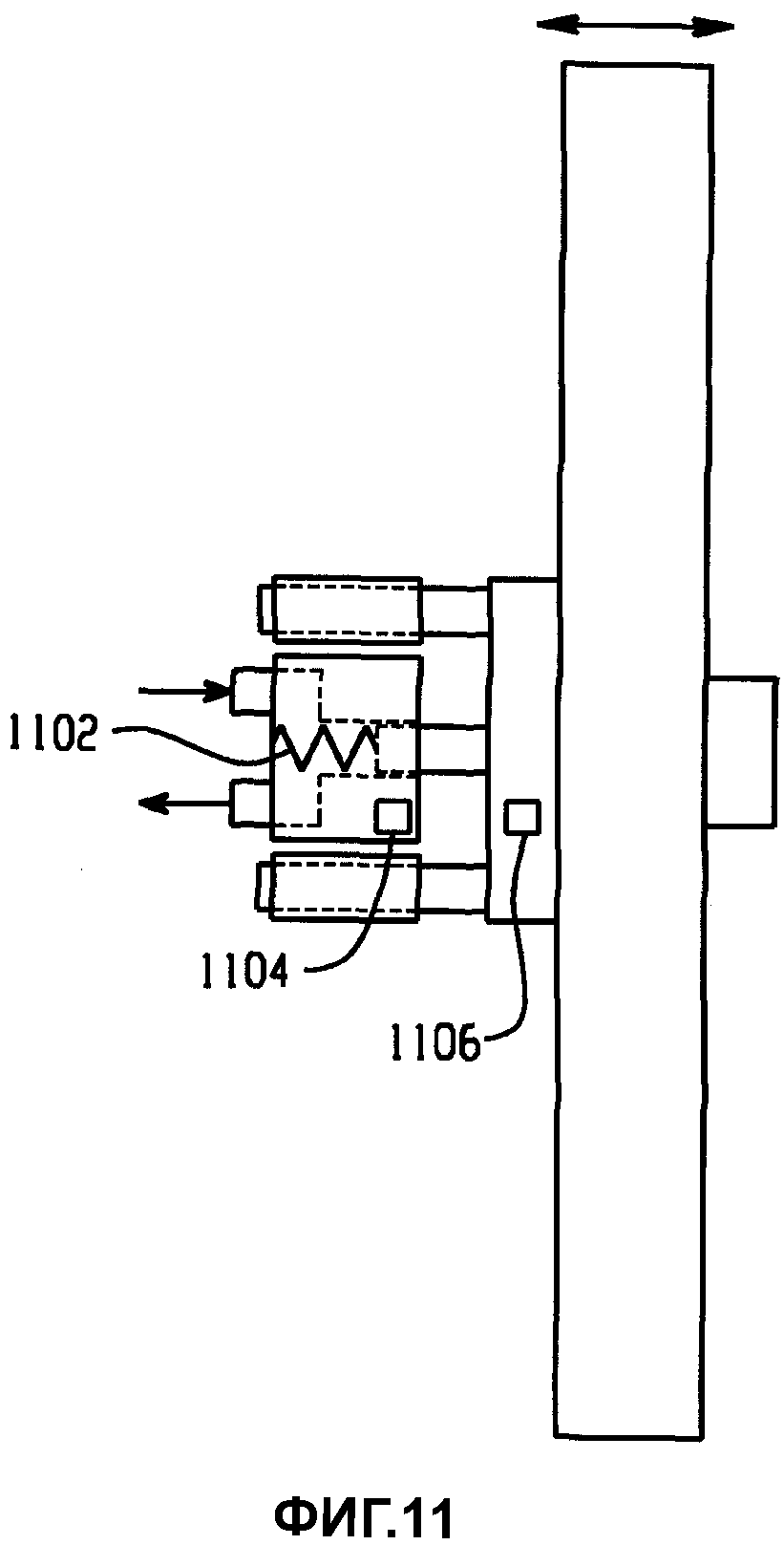
Как кратко обсуждалось выше, в одном неограничивающем варианте осуществления с системой 100 используется тормозящее устройство 112. На фиг. 9-11 изображен пример тормозящего компонента 112, соединенного с вращающейся гентри 106, обращенный вниз к системе в направлении пола. В данном примере для объяснения, тормозящий компонент 112 располагается в вертикальном положении. Однако следует понимать, что тормозящий компонент 112 может быть расположен по-разному. Кроме того, могут использоваться более одного тормозящего компонента 112.
Первоначально со ссылкой на фиг. 9 и 10, тормозящий компонент 112 содержит привод 902. Изображенный привод 902 содержит впускное отверстие или первое отверстие 904, выпускное отверстие или второе отверстие 906, камеру 908 и стержень 910, такой как поршень и т.п. Стержень 910 сконфигурирован для перехода между первым задвинутым положением (фиг. 9) в камере 908 и вторым выдвинутым положением (фиг. 10) в камере 908.
Газ, такой как воздух, текучая среда, вода и т.д., входя во впускное отверстие 904, заполняет камеру 908, заставляя стержень 910 двигаться во второе выдвинутое положение. Поступающая среда может также использоваться для приложения нагрузки, когда сила прикладывается к стержню 910 в направлении первого задвинутого положения. Воздух может быть подан к впускному отверстию 904 нагнетательный резервуар, бак, компрессор, насос и т.п. Выпуск газа через выпускное отверстие 906 позволяет стержню 910 двигаться в первое задвинутое положение. Всасывание и т.п. может использоваться, чтобы перемещать текучую среду и вытягивать стержень 910 в первое задвинутое положение.
Тормозная колодка 912 крепится к концу стержня 910, который выдвигается из камеры 908, и приводу 902, когда стержень 910 находится во втором выдвинутом положении. По существу, тормозная колодка 912 также движется между первым задвинутым положением (фиг. 9) и вторым выдвинутым положением (фиг. 10), в котором тормозная колодка 912 физически контактирует с ротором 918 вращающейся рамы 106. В одном случае тормозная колодка 912 содержит металлический корпус, к которому присоединяется фрикционный материал или колодка. Корпус крепится к стержню 910 и поддерживает и рассеивает тепло от фрикционного материала. Фрикционный материал имеет соответствующий коэффициент трения для системы, к которой он крепится.
Один или более дополнительных стержней 914 также крепятся к тормозной колодке 912 и поступательно движутся внутри соответствующих направляющих 916. По существу, стержни 914 поступательно движутся внутри направляющих 916 между первыми задвинутым положениями (фиг. 9) и вторыми выдвинутыми положениями (фиг. 10) с тормозной колодкой 912. Стержни 914 могут использоваться для облегчения выравнивания тормозной колодки 912 и поперечные нагрузки несущей системы. В одном моменте стержни 914 включают в себя сталь и движутся поступательно вдоль шарикоподшипников или других подшипников направляющих 916. Такие подшипники могут служить для обеспечения плавности работы, устойчивости к заклиниванию, а также для предотвращения повреждения привода 902 сдвигающей силой.
В одном варианте осуществления привод 902 автоматически приводит в действие тормозную колодку 912 при пропадании электропитания системы. В данном варианте осуществления, когда электропитание присутствует, привод 902 через соленоид и т.п. автоматически закрывает впускное отверстие 904 и открывает выпускное отверстие 906. В данном варианте осуществления электроэнергия подается на привод 902, который поддерживает упомянутые выше состояния отверстий 904, 906. При пропадании электропитания питание привода 902 отключается и привод 902 автоматически открывает впускное отверстие 904 и закрывает выпускное отверстие 906, который позволяет текучей среде входить в камеру 908, заставляя стержень 910 двигаться вперед, чтобы сцепиться с ротором 918.
Трение между тормозной колодкой 912 и ротором 918 заставляет вращающуюся раму 106 замедляться и останавливать вращение. Когда электропитание восстанавливается, привод 902 автоматически открывает впускное отверстие 904 и закрывает выпускное отверстие 906, освобождая тормозную колодку 912. В данном варианте осуществления текучая среда, выходящая из камеры 908, тянет стержень 910 и, следовательно, тормозную колодку 912 от ротора 918. Данный вариант осуществления позволяет тормозной колодке 912 сцепить и остановить ротор 918 автоматически при пропадании электропитания. В противном случае тормозная колодка 912 не сцепляется с ротором 918 и ротор 918 свободно вращается.
На фиг. 11 изображен вариант осуществления, в котором возвратная пружина 1102 крепится с натяжением к стержню 910. При пропадании электропитания текучая среда, входящая во впускное отверстие 904, преодолевает силу натяжения и заставляет тормозную колодку 912 двигаться вперед, чтобы зацепить ротор 918. При наличии электропитания возвратная пружина 1102 поддерживает стержень 910 в задвинутом положении или вытягивает стержень 910 из второго выдвинутого положения в первое задвинутое положение и, следовательно, тормозная колодка 912 движется в направлении от ротора 918. В данном варианте осуществления всасывание может использоваться или не использоваться, чтобы вытянуть стержень 910 в первое задвинутое положение.
В другом варианте осуществления контроллер 114 создает управляющий сигнал, который заставляет привод 902 выдвигать тормозную колодку 912, чтобы тормозить ротор 918. В данном варианте осуществления тормозная колодка 912 может также использоваться, чтобы выборочно тормозить ротор 918, когда электропитание доступно, например во время любых или всех тормозных циклов. Сюда может относиться исключительно торможение ротора 918, используя тормозящий компонент 112, или использование тормозящего компонента 112 в помощь другим способам торможения.
В другом варианте осуществления к тормозящему узлу 112 крепится датчик 1104 и/или 1106 (фиг. 11), который опознает, сцепилась или нет тормозная колодка 912 с ротором 918. Данная информация может использоваться, чтобы предотвратить попытку системы 100 вращать вращающуюся раму 106, когда тормоз сцеплен. Такой датчик может быть встроен в соленоид или встроен в привод 902. Альтернативно датчик может быть датчиком перемещения, который считывает движение стержня 910 и/или тормозной колодки 912.
Хотя приведенные выше варианты осуществления описываются в отношении компьютерного томографа, следует понимать, что здесь предполагается и другое применение с и/или без формирования изображения. Например, концепция подшипника, описанная, по меньшей мере, в отношении фиг. 1 и 2, может быть применена к любому подшипнику, в том числе, но не ограничиваясь, к подшипникам большого диаметра с относительно низкой жесткостью и/или тонким поперечным сечением. Если перечислить лишь некоторые применения, то такие подшипники можно видеть в башенках резервуаров, экскаваторах, вертолетах и ветряных мельницах. В некотором случае подшипник может упоминаться как поворотный подшипник. Конечно, концепция может также применяться к подшипникам малого и/или среднего размера.
Подшипники большого диаметра с тонким поперечным сечением обычно больше подвержены деформациям дорожки качения по сравнению с малыми подшипниками, благодаря свойственной им относительно низкой жесткости, делающей их, таким образом, более подвижными по сравнению с их более мелкими аналогами. Так как подшипники обычно относительно гибки/подвижны, они обычно будут принимать жесткость своей опорной конструкции/корпуса. Если опорная конструкция является неоднородной по своей жесткости (или по путям передачи нагрузки), то тогда более жесткие части будут видны как конструктивно усиленные точки. В данных усиленных точках можно видеть чрезмерно большие нагрузки на подшипник, что снижает срок службы подшипника. Для примера, для большого подшипника/кольца (30 футов в диаметре), подвешенного в воздухе на трех опорных стойках, в каждой из стоек должна быть конструктивная усиленная точка.
В более широком плане предполагаются также применения, отличные от подшипников. Примером может служить любой случай, когда существует необходимость соединить две критичные поверхности вместе (по оси или по радиусу). В таком случае изогнутые элементы должны деформироваться и оставлять поверхности/признаки невредимыми. Например, форма признаков должна оставаться той же самой, однако изогнутые элементы полностью согласовываются с неидеальными поверхностями.
На фиг. 12, 13 и 14 изображен вариант осуществления, в котором система 100 содержит бесконтактный подшипник 1200, такой как воздушный подшипник, и тормозящий компонент 112 (фиг. 1) является частью бесконтактного подшипника 1200. На фиг. 12 изображен вид сбоку в разрезе воздушного подшипника 1200, на фиг. 13 изображен вид воздушного подшипника 1200 сзади системы 100, и на фиг. 14 изображен общий вид воздушного подшипника 1200.
Примеры соответствующих воздушных подшипников описываются в патентах США 6276145, 6404845 и 7023952 и в патентной заявке № 11/568227, которые в полном объеме включены в данную заявку посредством ссылки. Воздушный подшипник 120 может приводиться в движение бесконтактным двигателем, таким как индукционный двигатель, бесщеточный двигатель постоянного тока, магнитный двигатель или другой бесконтактный двигатель.
Со ссылкой на фиг. 12-14, подшипник 1200 содержит первый участок 1202, который крепится к вращающейся гентри 106. Первый участок 1202 вращается вместе с вращающейся гентри 106. Изображенный первый участок 1202 является круговым "T"-образным кольцом с обоймой 1204 подшипника на каждой стороне "T"-образного кольца. Здесь также предполагаются и другие формы для первого участка 1202.
С дополнительной ссылкой на фиг. 12-14, подшипник 1200 также содержит один или более вторых участков 1206, которые крепятся к неподвижной гентри 102 (не видна). Вторые участки 1206 располагаются рядом с обоймой 1204 подшипника. Как описано ниже более подробно, текучая среда используется, чтобы отделить вторые участки 1206 от обоймы 1204 подшипника, позволяя, таким образом, вращающейся гентри 106 свободно вращаться.
Заметим, что на фиг. 12-14 имеются в общей сложности семь (7) вторых участков 1206, три (3) расположены на задней стороне 1208 "T"-образного кольца, два (2) расположены на передней стороне 1210 "T"-образного кольца, и два (2) расположены рядом с внешним периметром 1212 "T"-образного кольца. Другие варианты осуществления содержат больше или меньше вторых участков 1206, в том числе по-другому расположенные вторые участки 1206.
В изображенном варианте осуществления клапан 1218, такой как соленоид, позволяет выборочно пропускать текучую среду 1220 (например, воздух) от источника 1222 текучей среды ко второму участку 1206, чтобы облегчить создание, по существу, зазора с невязкой текучей средой между вторым участком 1206 и обоймой 1204. Текучая среда, подаваемая к клапану 1218, может поступать от различных источников, таких как нагнетательная камера, компрессор, воздухоподаватель для текучей среды или т.п. Для ясности и краткости на чертеже в качестве примера изображен только один клапан 1218. Однако клапан 1218 может использоваться с двумя или более вторыми участками 1206, в том числе со всеми вторыми участками 1206.
Контроллер 114 (фиг. 1) управляет клапаном 1218. В одном случае клапан 1218 является электрически управляемым нормально открытым клапаном и закрывается управляющим сигналом от контроллера 114. В данном случае при отсутствии управляющего сигнала клапан 1218 автоматически открывается и прохождение текучей среды через клапан 1218 сдерживается. Подпружиненный клапан может использоваться для облегчения открывания клапана 1218 или переключения клапана 1218 из закрытого состояния в открытое состояние. Контроллер 114 может также вырабатывать управляющий сигнал, чтобы регулировать открывание клапана 1218, или не подавать управляющий сигнал, чтобы управлять открыванием клапана 1218. В других вариантах осуществления используется нормально закрытый или другой клапан.
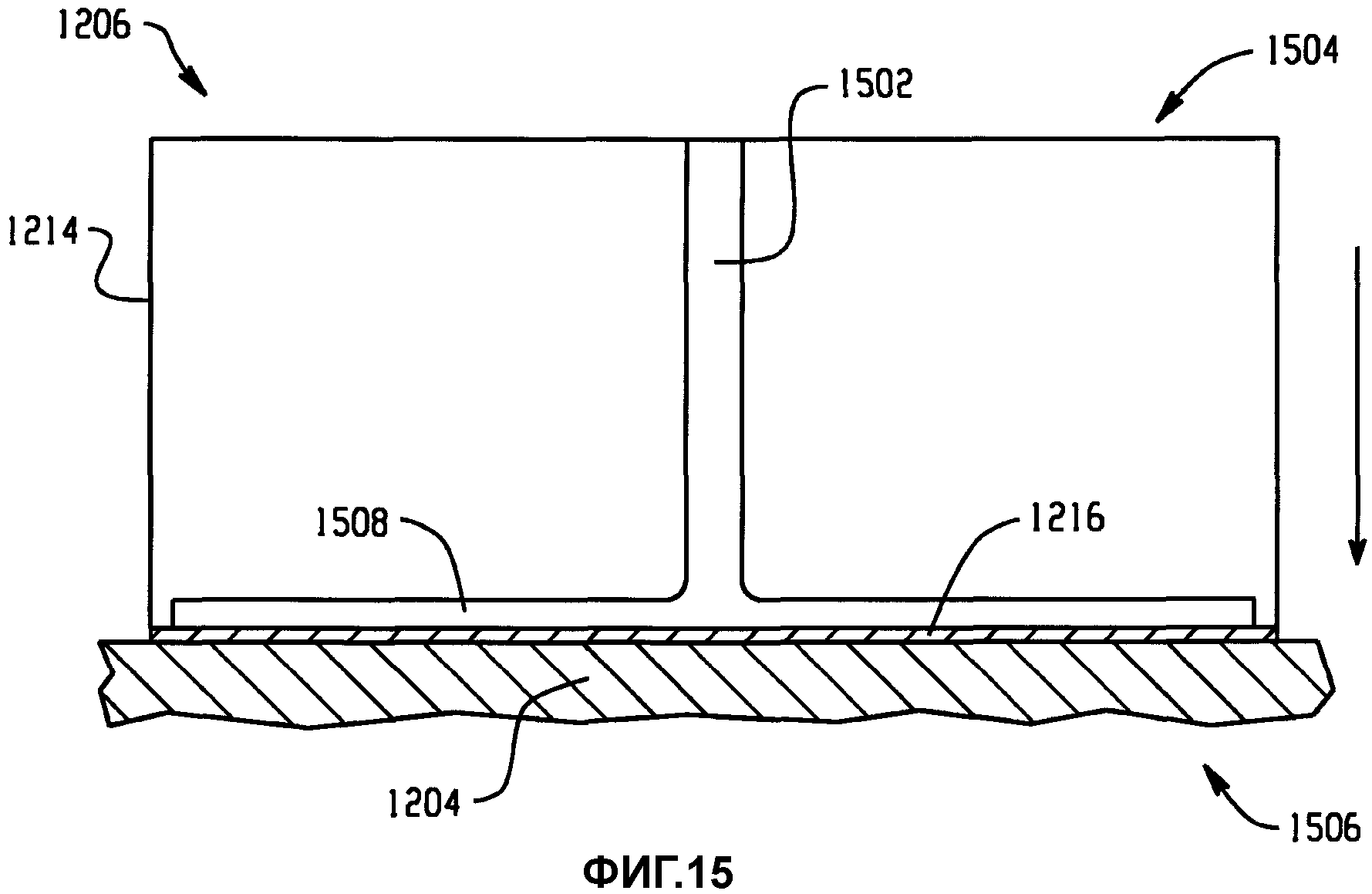
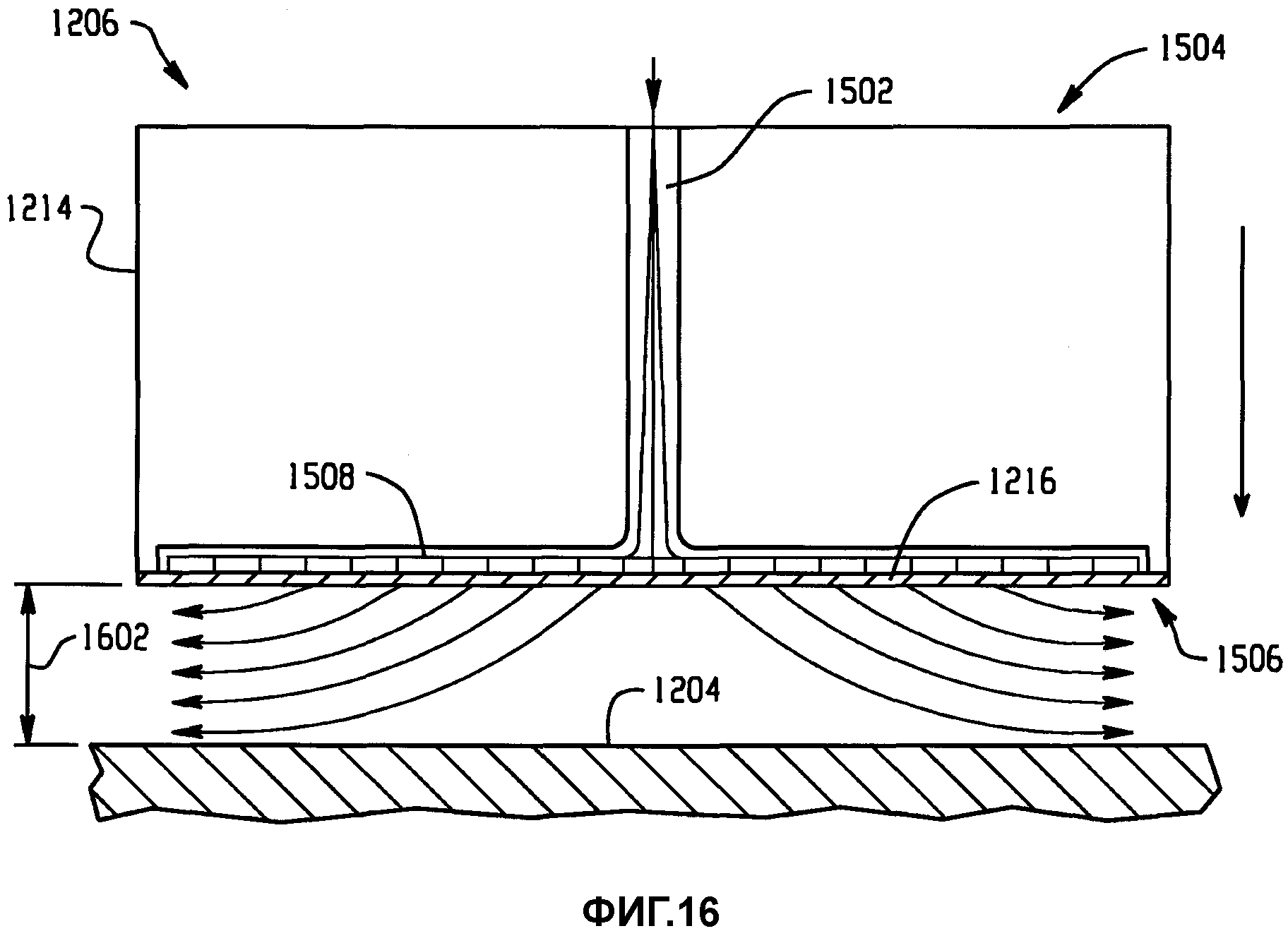
В изображенном варианте осуществления, по меньшей мере, один из вторых участков 1206 содержит блок 1214 подшипника с тормозной колодкой 1216, прикрепленный к нему, и сконфигурирован для перемещения между первым положением, в котором тормозная колодка 1216 физически сцепляется с обоймой 1204, и вторым положением, в котором тормозная колодка 1216 отделяется от обоймы 1204. При сцеплении с обоймой 1204 тормозная колодка 1216 задерживает вращение вращающейся гентри 106 или замедляет вращение вращающейся гентри 106. При расцеплении или отделении от обоймы 1204 вращающаяся гентри 106 может свободно вращаться. На фиг. 15 и 16 изображен пример второго участка 1206 с тормозной колодкой 1216. В данном примере канал 1502 проходит сквозь блок 1214 подшипника от задней стороны 1504 блока 1214 подшипника к передней стороне 1506 блока 1214 подшипника вдоль направления оси z. Канал 1502 ведет к двумерному углублению 1508 в передней стороне 1506 блока 1214 подшипника. Колодка 1216 крепится к передней стороне 1506 блока 1214 подшипника, закрывая углубление 1508. Соответствующая колодка 1216 содержит углеродный материал с относительно высокой плотностью, который пористый для воздуха, имеет относительно низкий коэффициент износа и может останавливать движение вращающейся гентри 106. Здесь также предполагаются и другие колодки.
Как изображено на фиг. 16, когда клапан 1218 закрыт, текучая среда проходит через канал 1502 к углублению 1508 и рассеивается, в целом однородно, через пористый материал относительно обоймы 1204, создавая зазор 1602 между колодкой 1216 и обоймой 1204. Как показано на фиг. 15, когда клапан 1218 открыт, текучая среда не протекает через клапан 1218 к блоку 1214 подшипника и колодке 1216 и колодка 1216 сцепляется с обоймой 1204. Поры в материале, в целом, достаточно большие, так чтобы мусор не засорял поры и позволял воздуху проходить через поры и удалять мусор с поверхности колодки.
На фиг. 17 и 18 показан пример установки второго участка 1206 на неподвижной гентри 102, используя монтажное устройство 1702. Монтажное устройство 1702 крепит заднюю сторону 1504 второго участка 1206 к неподвижной гентри 102. Изображенное монтажное устройство 1702 сконфигурировано для разрешения второму участку 1206 двигаться поступательно и/или вращаться и располагается со смещением относительно центральной области 1704 второго участка 1206 в плоскости x-y.
Как показано на чертеже, центральная область 1706 монтажного устройства 1702 установлена на первом расстоянии 1708 от первого 1710 из двух концов второго участка 1206 и на втором большем расстоянии 1712 от второго 1714 из двух концов. В результате второй участок 1706 имеет тенденцию наклоняться по мере того, как он движется поступательно в направлении от обоймы 1204, причем более короткий участок наклоняется к вращающейся гентри 106, а более длинный участок наклоняется в направлении от вращающейся гентри 106.
Пример наклона показан на фиг. 18. Заметим, что второй участок 1206 устанавливается так, чтобы более короткий участок был передним краем 1802 относительно направления 1804 вращения вращающейся гентри 106, а более длинный участок являлся задним краем 1806 относительно направления 1804 вращения вращающейся гентри 106. Передний край 1802 физически контактирует с обоймой 1204 перед задним краем 1806, когда второй участок 1206 сцепляется с обоймой 1204. Это может смягчить долбление обоймы 1204 вторым участком 1206, которое может происходить, если задний край 1806 приходит в контакт с обоймой 1204 первым.
Хотя изображенный вариант осуществления описывает использование одиночного второго участка 1206 в качестве тормоза, следует понимать, что блок 1214 и колодка 1216 могут содержать один или более вторых участков 1206 и использоваться в качестве тормоза. Когда система 100 содержит множество таких вторых участков 1206, часть или все вторые участки 1206 могут индивидуально или одновременно использоваться в качестве тормоза.
Кроме того, контроллер 114 может содержать развитые логические функции для выбора конкретного второго участка(ов) 1206 для использования в качестве тормоза. Например, в одном случае система 100 может выбрать вторые участки 1206, основываясь на износе колодок 1216. В другом случае система 100 может выбрать второй участок(и) 1206, основываясь на угловой скорости вращающейся гентри. В случае аварии в одном варианте осуществления один или более вторых участков 1206 используются автоматически, чтобы тормозить вращающуюся гентри 106 при пропадании электропитания.
В другом варианте осуществления в дополнение или вместо воздушной пористой колодки используется дроссельная колодка. Обычно дроссельная колодка использует вместо пор один или более выполненные машинным способом карманы, которые распределяют воздух. При одной подходящей дроссельной колодке карманы сконфигурированы так, чтобы они не подвергались появлению царапин или других дефектов. В одном случае секции колодки, контактирующие с обоймой 1204, содержат фрикционный материал. Сконфигурировав данные секции так, чтобы они не контактировали с дроссельными отверстиями, колодка может вести себя, по существу, аналогично описанной здесь пористой колодке 1216.
В другом варианте осуществления подшипник является магнитным подшипником. Обычно магнитный подшипник использует силу магнитного поля для создания воздушного зазора между неподвижной и вращающейся сторонами. В одном случае подшипник является электромагнитным подшипником, приводимым в действие источником электропитания, создающим силу магнитного поля. Применяя углерод для корпуса подшипника, можно видеть тот же самый эффект, который описан выше. При отключении электропитания электромагнитного подшипника вращающийся участок должен входить в контакт с углеродом и замедлять движение до остановки. Заметим, что в данном случае, тормоз приводится в действие простым отключением электропитания.
На фиг. 19 изображен способ соединения с помощью бесконтактного подшипника вращающейся гентри 106 с неподвижной гентри 102 системы 100 формирования изображения.
На этапе 1902 нормально открытый клапан 1218 закрывается, чтобы позволить воздуху проходить от источника 1222 воздуха в канал 1502 корпуса 1214 подшипника второго участка 1206.
На этапе 1904 воздух проходит через канал 1502 и выходит обычно равномерно через колодку 1216 второго участка 1206.
На этапе 1906 вышедший воздух, который направляется в обойму 1204 первого участка 1202 подшипника 1200, заставляет второй участок 1206 втягиваться в обратном направлении из обоймы 1204, оставляя свободный от трения зазор между ними.
На этапе 1908 вращающаяся гентри 106 приводится в движение, чтобы свободно вращаться относительно второго участка 1206 подшипника 1200.
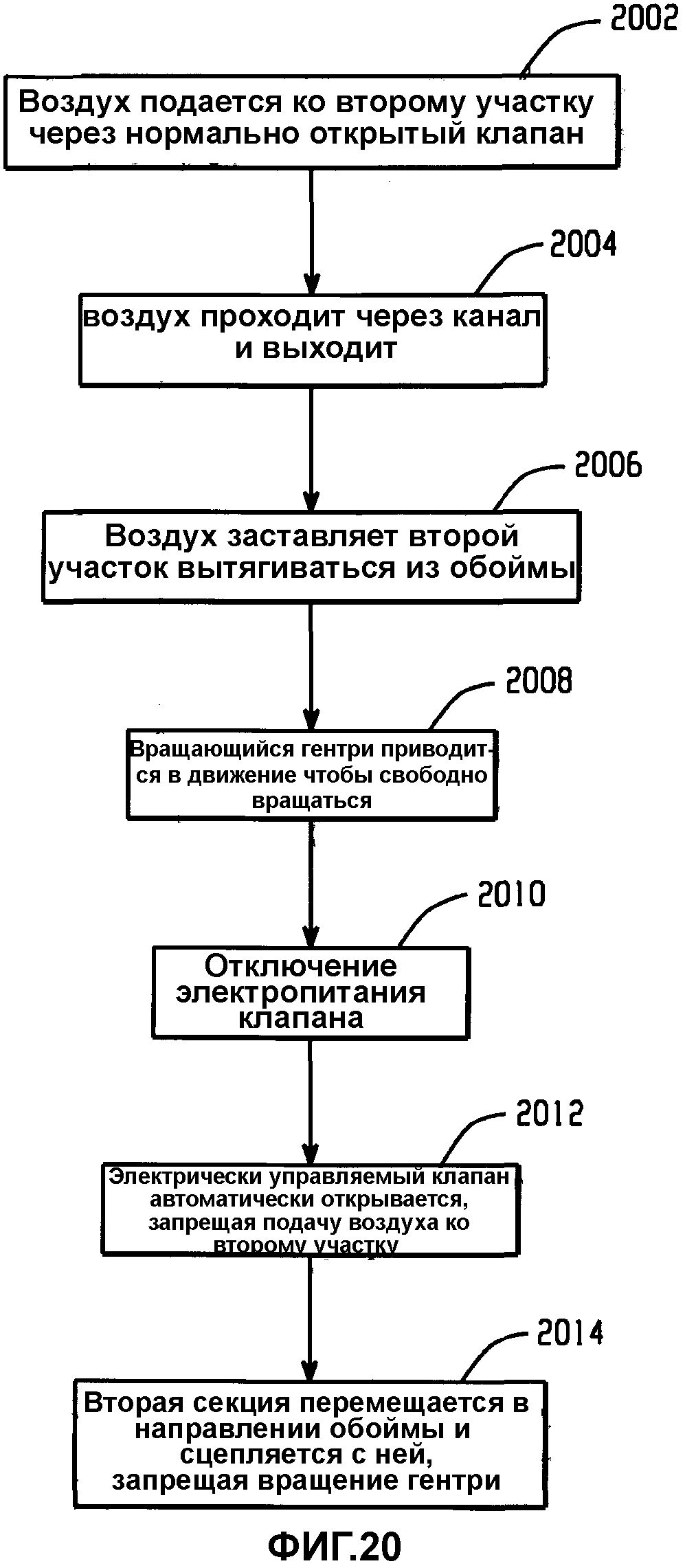
На фиг. 20 изображен способ запрещения или замедления движения вращающейся гентри 106 при отключении электропитания.
На этапе 2002 воздух подается ко второму участку 1206 через электрически управляемый нормально открытый клапан, такой как клапан 1218.
На этапе 2004 воздух проходит через канал 1502 и, в целом, равномерно выходит из колодки 1216.
На этапе 2006 воздух заставляет второй участок 1206 вытягиваться из обоймы 1204.
На этапе 2008 вращающаяся гентри 106 приводится в движение, чтобы свободно вращаться относительно второго участка 1206 подшипника 1200.
На этапе 2010, когда пропадает электропитание системы, отключается электропитание электрически управляемого клапана.
На этапе 2012 электрически управляемый клапан автоматически открывается, запрещая подачу воздуха ко второму участку 1206.
На этапе 2014 вторая секция 1206 перемещается в направлении обоймы 1204 и сцепляется с ней, запрещая вращение вращающейся гентри 106 или удерживая вращающуюся гентри 106 в неподвижном положении.
На фиг. 21 изображен способ управляемого запрещения или замедления движения вращающейся гентри 106.
На этапе 2102 воздух подается ко второму участку 1206 через электрически управляемый нормально открытый клапан, такой как клапан 1218.
На этапе 2104 воздух проходит через канал 1502 и выходит из колодки 1216, в целом равномерно, заставляя второй участок 1206 втягиваться от обоймы 1204.
На этапе 2106 вращающаяся гентри 106 приводится в движение, чтобы свободно вращаться относительно второго участка 1206 подшипника 1200.
На этапе 2108 на клапан подается управляющий сигнал, чтобы выборочно ограничивать прохождение воздуха через него.
На этапе 2110 колодка 1216 контролируемо сцепляется с обоймой 1204, замедляя или останавливая вращение вращающейся гентри 106.
Изобретение было описано со ссылкой на различные варианты осуществления. После прочтения приведенного здесь описания в них могут возникнуть модификации и изменения. Имеется в виду, что изобретение должно истолковываться как содержащее в себе все такие модификации и изменения, в мере их соответствия с объемом приложенной формулы изобретения или его эквивалентов.
Реферат
Изобретение относится к области рентгенотехники. Гентри для системы формирования изображения содержит вращающуюся раму (106), которая вращается около области исследования вокруг оси z; вторую раму (102, 104); опору (108), соединяющую с возможностью вращения вращающуюся раму (106) со второй рамой (102, 104), при этом одна из вращающейся рамы (106) или второй рамы (102, 104) подвижно соединена с опорой (108), а другая из вращающейся рамы (106) или второй рамы (102, 104) жестко соединена с опорой (108), и тормозящий компонент (112), который выборочно применяет тормоз к вращающейся раме (106).Тормозящий компонент (112) является частью бесконтактного подшипника с текучей средой, содержащего первую часть (1202), прикрепленную к вращающейся раме (106), и вторую часть (1206), прикрепленную ко второй раме (102), при этом вторая часть (1206) сцепляется с первой частью (1202) для торможения вращающейся рамы (106), при этом тормозящий компонент (112) управляется электрически управляемым клапаном (1218). 2 н. и 11 з.п. ф-лы, 21 ил.
Формула
вращающуюся раму (106), которая вращается около области исследования вокруг оси z;
вторую раму (102, 104);
опору (108), соединяющую с возможностью вращения вращающуюся раму (106) со второй рамой (102, 104), при этом одна из вращающейся рамы (106) или второй рамы (102, 104) подвижно соединена с опорой (108), а другая из вращающейся рамы (106) или второй рамы (102, 104) жестко соединена с опорой (108), и
тормозящий компонент (112), который выборочно применяет тормоз к вращающейся раме (106), при этом
тормозящий компонент (112) является частью бесконтактного подшипника с текучей средой, содержащего первую часть (1202), прикрепленную к вращающейся раме (106), и вторую часть (1206), прикрепленную ко второй раме (102), при этом вторая часть (1206) сцепляется с первой частью (1202) для торможения вращающейся рамы (106), при этом тормозящий компонент (112) управляется электрически управляемым клапаном (1218).
статор (202);
первую часть (204) подшипника и
опору (208) подшипника, которая соединяет статор (202) и первую часть (204) подшипника.
привод (902) с тормозной колодкой (912), причем привод (902) заставляет тормозную колодку (912) двигаться в направлении вращающейся рамы (106), чтобы тормозить вращающуюся раму (106).
используют первую часть (1206) бесконтактного подшипника (1200) системы (100) формирования изображения для торможения вращающейся второй части (1202) бесконтактного подшипника (1200) и, следовательно, торможения вращающейся рамы (106), соединенной со второй частью (1202),
при этом бесконтактный подшипник (1200) соединяет вращающуюся раму (106) системы (100) формирования изображения с неподвижной второй рамой (102) системы (100) формирования изображения,
при этом первая часть (1206) управляется электрически управляемым клапаном (1218).
Комментарии