Устройство захвата изображения - RU2548050C2
Код документа: RU2548050C2
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству захвата изображения, имеющему функцию автофокуса.
УРОВЕНЬ ТЕХНИКИ
Обычные способы обнаружения фокуса, используемые для камер, включают в себя способ обнаружения контраста, который используется для компактных камер, видеокамер и т.п., способ разделения зрачка, который используется для однообъективных зеркальных камер, и т.п. Способ обнаружения контраста представляет собой способ, в котором обнаружение фокуса выполняется посредством обнаружения изменения контраста изображения, захваченного датчиком изображения, при приведении в действие формирующего изображение объектива. Однако в способе обнаружения фокуса, основанном на обнаружении контраста, обнаруживается контраст изображения, захватываемого датчиком изображения, при движении формирующего изображение объектива, и состояние фокуса обнаруживается из величины изменения обнаруженного контраста. Таким образом, способ имеет недостаток в том, что, например, в состоянии, которое существенно отличается от сфокусированного состояния, обнаружение фокуса занимает время. Кроме того, способ имеет недостаток в том, что обнаружение фокуса не может выполняться в отношении движущегося объекта. В то же время способ обнаружения фокуса, основанный на разделении зрачка, представляет собой способ, в котором состояния фокуса формирующего изображение объектива обнаруживается посредством сопоставления двух изображений, генерируемых световыми лучами, проходящими сквозь разные области зрачка формирующего изображение объектива.
В последние годы даже однообъективные зеркальные камеры стали выполнять съемку движущихся изображений, и существует потребность в улучшении быстродействия автоматической фокусировки (AF). Таким образом, в отношении цифровых камер, в которых обычно использовалась контрастная AF, в выложенной заявке на патент Японии № 4-267211 описывается твердотельное устройство захвата изображения, которое дополнительно выполняет функции элемента захвата изображения, в котором двумерно размещены пиксели, в которых относительные положения микролинз и блока фотоэлектрического преобразования сдвигаются, чтобы улучшить быстродействие AF. Когда твердотельное устройство захвата изображения, описанное в выложенной заявке на патент Японии № 4-267211, снимает обычное изображение, устройство добавляет пиксели, имеющие другие направления относительного сдвига микролинз и блока фотоэлектрического преобразования, таким образом генерируя изображение. С другой стороны, при вычислении фокусного расстояния формирующего изображение объектива твердотельное устройство захвата изображения выполняет операцию сопоставления, используя пару сигналов изображения, генерируемых столбцами пикселей, имеющими разные направления относительного сдвига микролинз и блока фотоэлектрического преобразования, таким образом вычисляя фокусное расстояние формирующего изображение объектива. Кроме того, в случае, когда происходит виньетирование из-за формирующего изображение объектива в световых лучах, которые формируют изображения во время вычисления фокусного расстояния, виньетирование из-за формирующего изображение объектива вызывает то, что сигналы изображения являются асимметричными (уменьшается совпадение изображений). Для рассмотрения данного вопроса в выложенной заявке на патент Японии № 5-127074 описывается технология, в которой конкретный фильтр модификации изображения, размещенный в устройстве захвата изображения, деформируется в соответствии с относительным отверстием диафрагмы, положением выходного зрачка и величиной расфокусировки, фильтр модификации изображения применяется к сигналам изображения, и, после этого, вычисляется фокусное расстояние.
В случае, когда неподвижное изображение получается с использованием элемента захвата изображения, содержащего пиксели обнаружения фокуса, как описано выше, отсутствуют пиксельные данные, соответствующие положению пикселей обнаружения фокуса. Если сигналы, полученные от пикселей обнаружения фокуса, используются в качестве сигналов изображения для неподвижного изображения «как есть», теряется связность между сигналами от пикселей обнаружения фокуса и сигналами от пикселей вокруг сигналов обнаружения фокуса, так как угловые характеристики приема света пикселей обнаружения фокуса отличаются от угловых характеристик приема света обычных пикселей захвата изображения, и, поэтому, не может быть получено подходящее изображение. Чтобы решить такую проблему, в выложенной заявке на патент Японии № 2007-124056 описывается технология, в которой сигналы изображения, соответствующие сигналам от пикселей обнаружения фокуса, подвергаются, в зависимости от уровня отсутствия, интерполяции, которая использует сигналы изображения от пикселей вокруг пикселей обнаружения фокуса, или коррекции смещения, или коррекции коэффициента усиления для отсутствующих пиксельных данных.
Однако вышеописанная обычная технология имеет проблему в том, что даже если коррекция изображения может выполняться подходящим образом в сфокусированной области, так как используются данные пикселей вокруг пикселей, подлежащих коррекции, коррекция изображения в состоянии расфокусировки выполняется с использованием разных пикселей, и, поэтому, не может генерироваться подходящее изображение.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение было сделано с учетом вышеописанных проблем и делает возможным реализацию подходящего процесса коррекции изображения, даже когда формирующий изображение объектив находится в состоянии расфокусировки в отношении заданных пикселей обнаружения фокуса.
Устройство захвата изображения согласно настоящему изобретению включает в себя средство захвата изображения, имеющее первую группу пикселей, которая принимает световой луч, проходящий через первую область в выходном зрачке формирующего изображение объектива, который формирует изображение объекта, вторую группу пикселей, которая принимает световой луч, проходящий через вторую область в выходном зрачке формирующего изображение объектива, причем вторая область отличается от первой области, и третью группу пикселей, которая принимает световой луч, проходящий через всю область в выходном зрачке формирующего изображение объектива, средство обнаружения фокуса, которое вычисляет величину расфокусировки формирующего изображение объектива, используя первый сигнал изображения, полученный от первой группы пикселей, и второй сигнал изображения, полученный от второй группы пикселей, и средство генерирования изображения, которое корректирует первый сигнал изображения и второй сигнал изображения, полученные от первой группы пикселей и второй группы пикселей средства захвата изображения, чтобы они были эквивалентными третьему сигналу изображения, полученному от третьей группы пикселей, и которое генерирует захваченное изображение, используя первый скорректированный сигнал изображения, второй скорректированный сигнал изображения и третий сигнал изображения, причем средство генерирования изображения корректирует первый сигнал изображения и второй сигнал изображения, основываясь на величине расфокусировки, вычисленной средством обнаружения фокуса, используя первый сигнал изображения и второй сигнал изображения, и получает первый скорректированный сигнал изображения и второй скорректированный сигнал изображения.
Дополнительные признаки настоящего изобретения станут очевидными из последующего описания примерных вариантов осуществления с ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
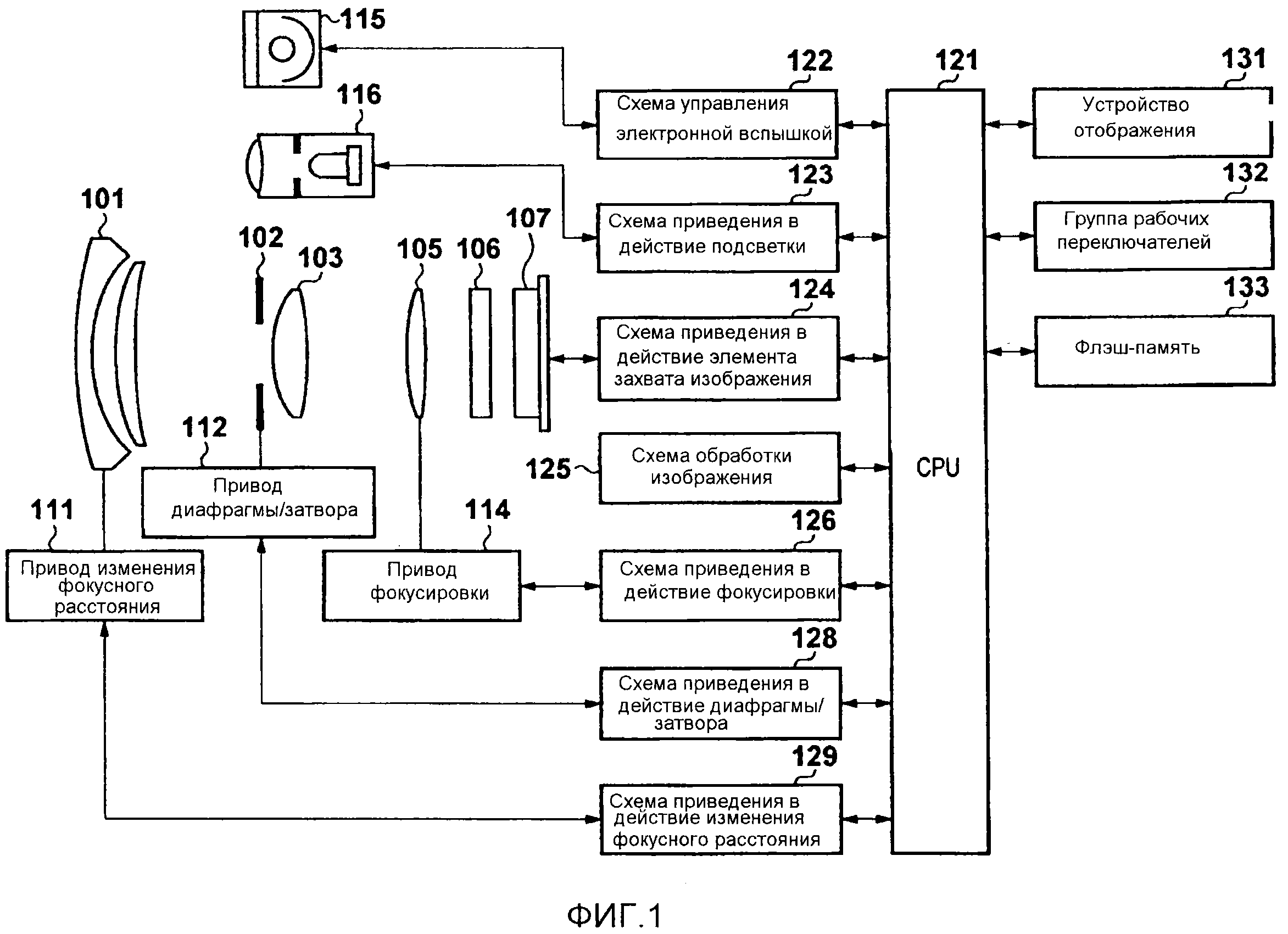
Фиг. 1 изображает конфигурацию устройства захвата изображения.
Фиг. 2A и 2B изображают структуру пикселей захвата изображения.
Фиг. 3A и 3B изображают структуру пикселей обнаружения фокуса.
Фиг. 4 представляет собой концептуальную диаграмму разделения зрачка.
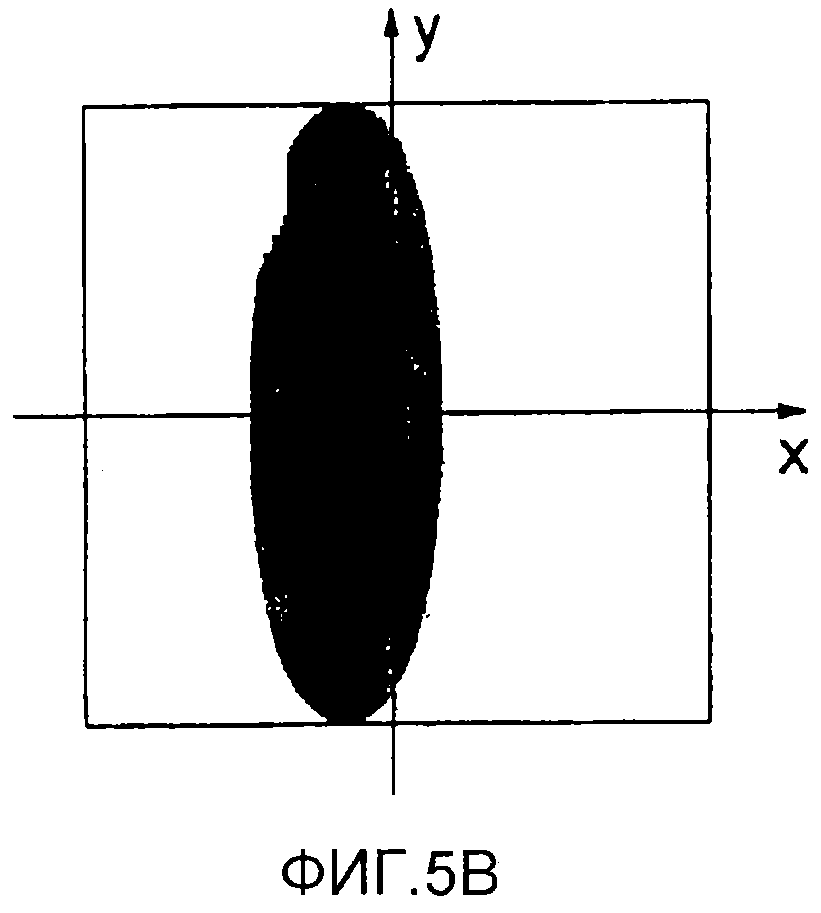
Фиг. 5A-5C представляют собой концептуальные диаграммы распределения интенсивности принятого света для пикселей обнаружения фокуса.
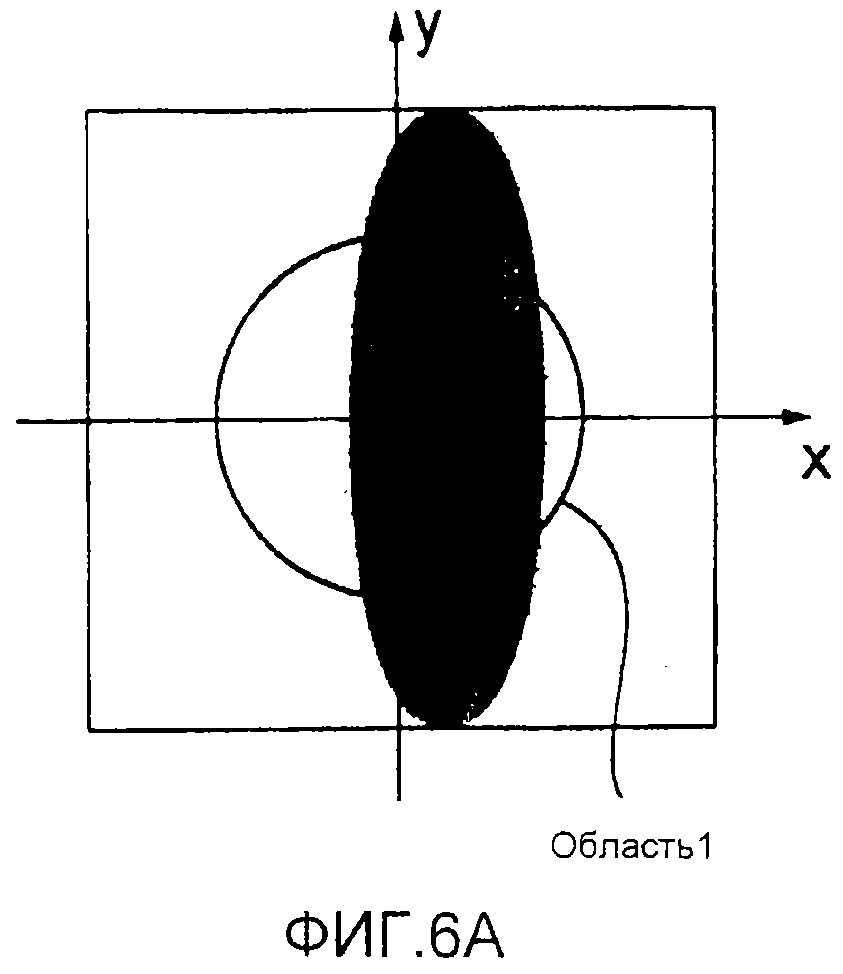
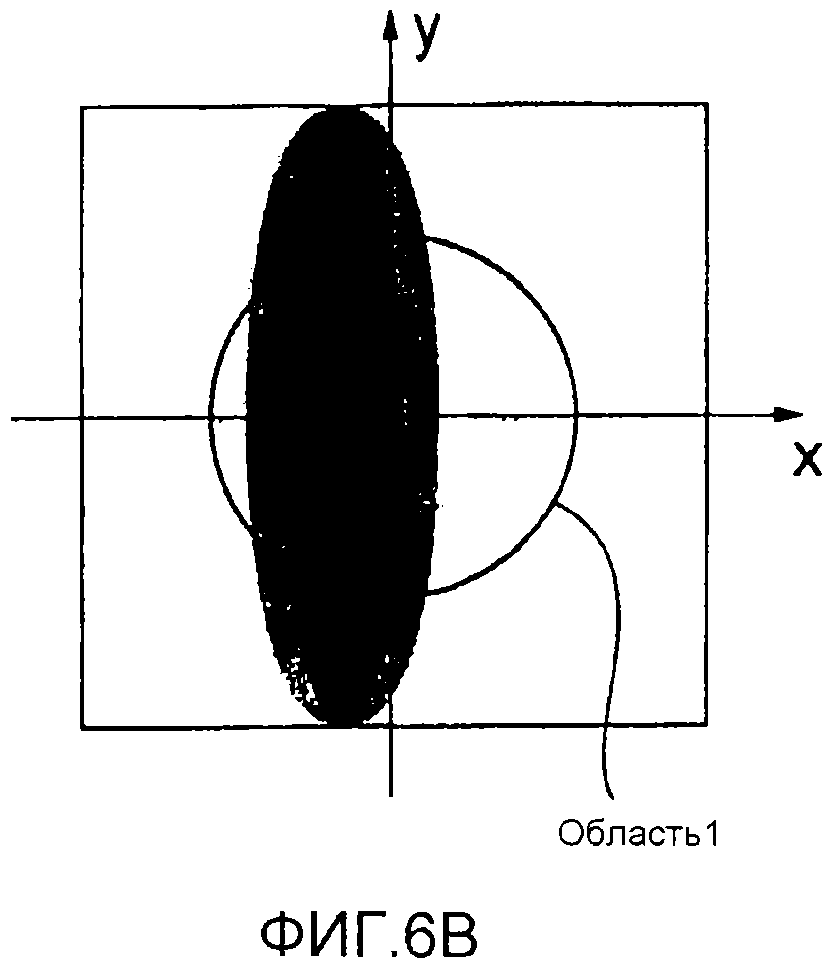
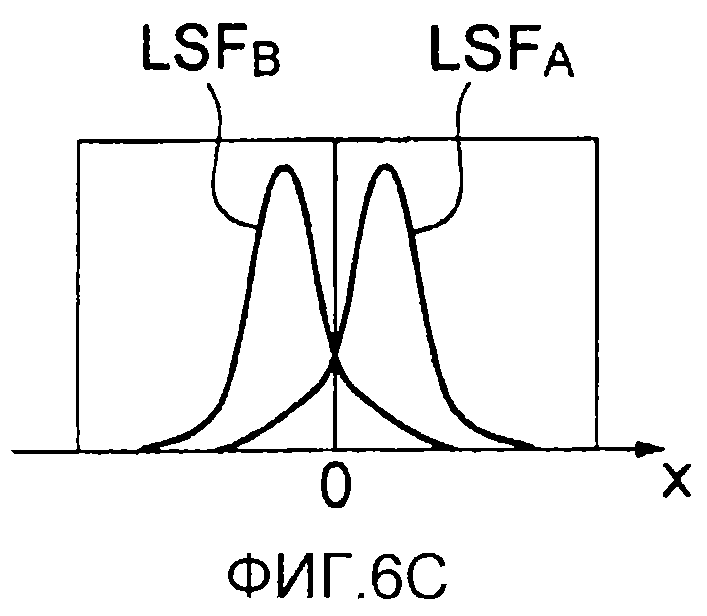
Фиг. 6A-6C представляют собой концептуальные диаграммы распределения интенсивности зрачка для пикселей обнаружения фокуса в середине элемента захвата изображения.
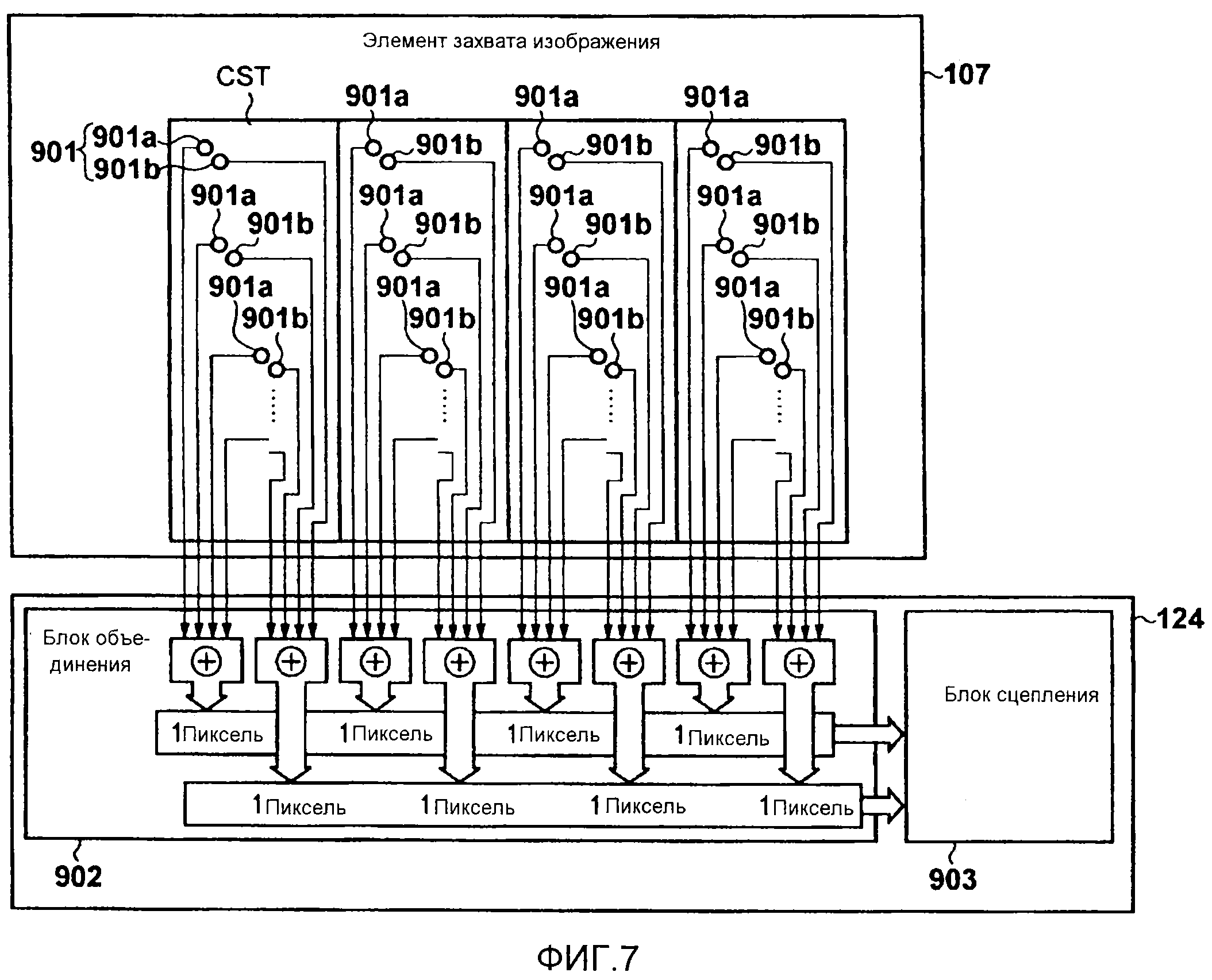
Фиг. 7 представляет собой схему соединений схемы приведения в действие элемента захвата изображения.
Фиг. 8 представляет собой диаграмму, изображающую сигналы изображения, которые получены от элемента на фиг. 7.
Фиг. 9A-9I представляют собой концептуальные диаграммы для объяснения способа коррекции асимметрии сигналов изображения.
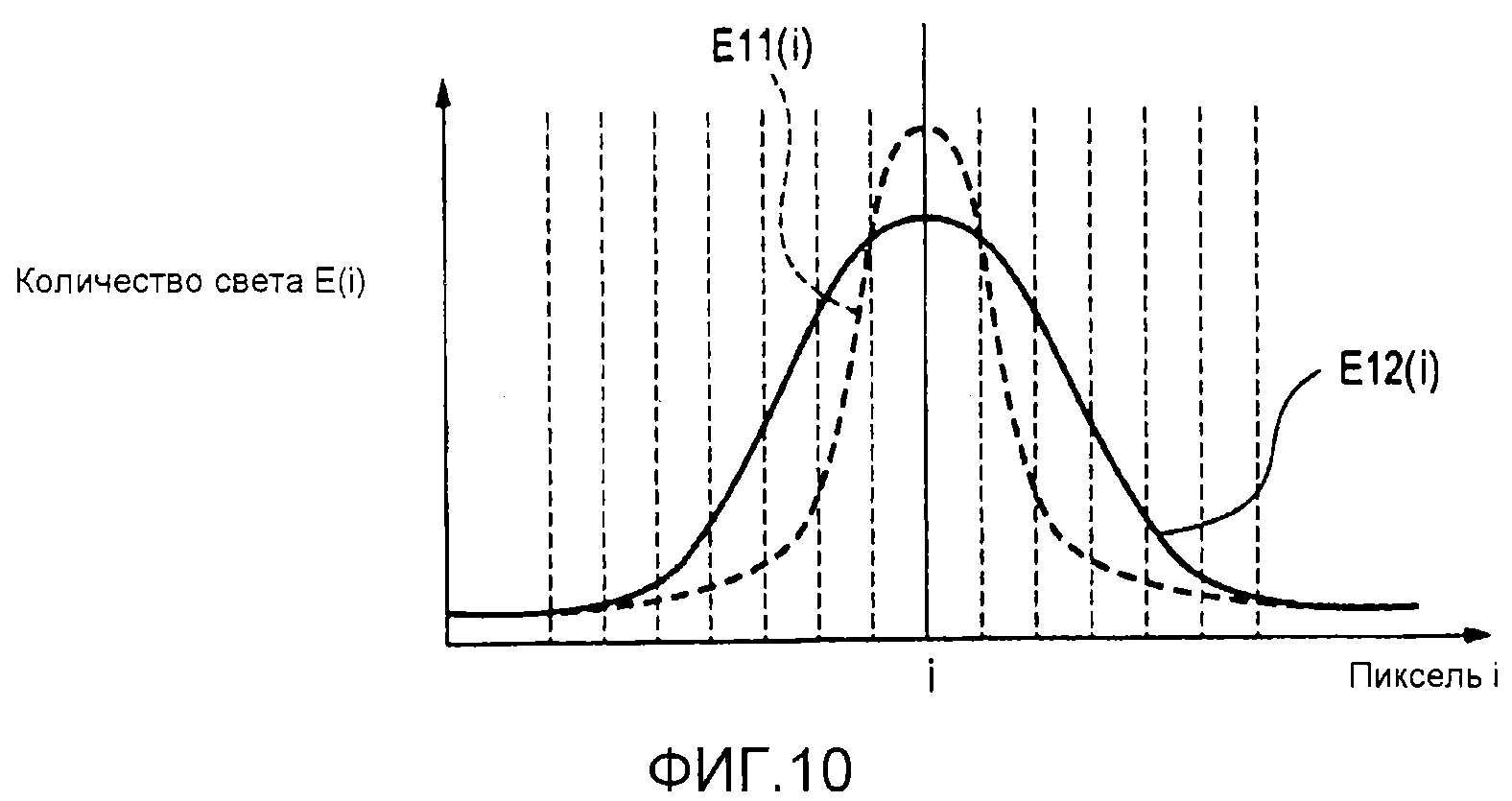
Фиг. 10 представляет собой диаграмму, изображающую сигналы изображения, которые получаются от пикселей захвата изображения в состоянии расфокусировки и в сфокусированном состоянии.
Фиг. 11 представляет собой диаграмму, изображающую сигналы изображения, которые получаются от пикселей обнаружения фокуса в состоянии расфокусировки и в сфокусированном состоянии.
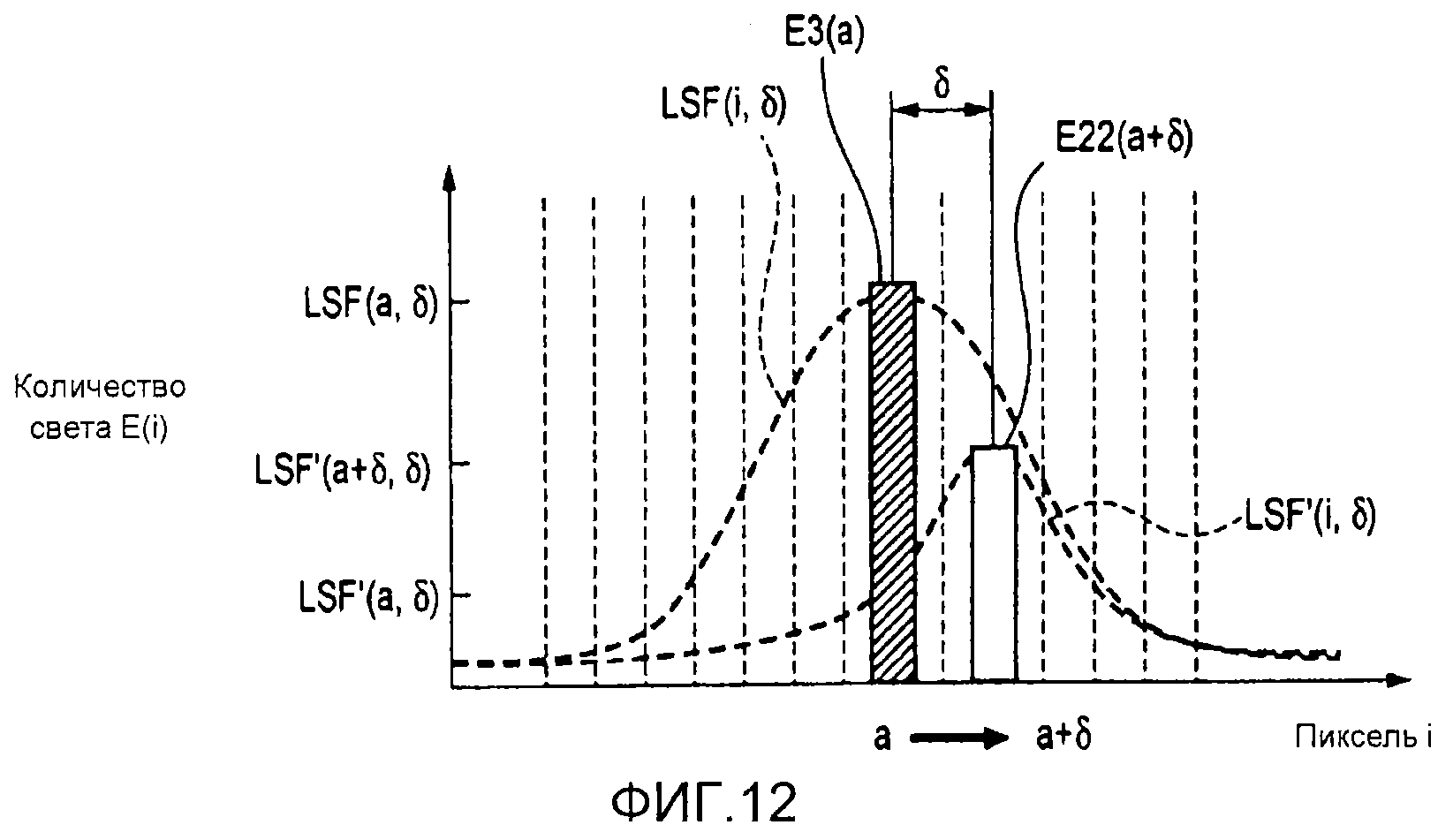
Фиг. 12 представляет собой концептуальную диаграмму коррекции пикселя обнаружения фокуса во время генерирования изображения.
Фиг. 13 представляет собой блок-схему последовательности операций для последовательности операций съемки.
Фиг. 14 представляет собой блок-схему последовательности операций коррекции в случае, когда пиксель, который задается с использованием значения апертуры, величины расфокусировки и положения пикселя, представляет собой пиксель обнаружения фокуса.
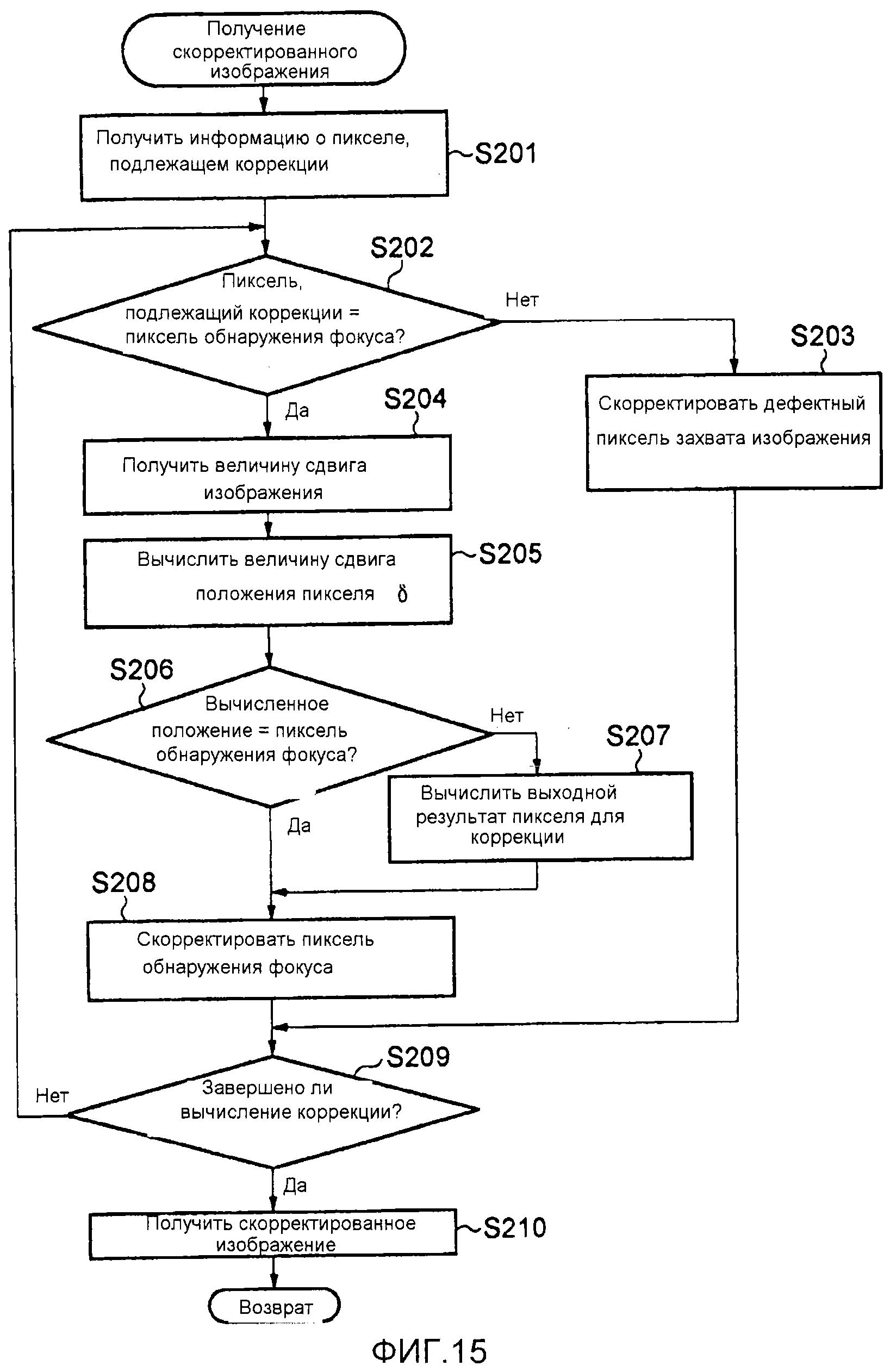
Фиг. 15 представляет собой блок-схему последовательности операций коррекции в случае, когда пиксель, который задается с использованием значения апертуры, величины расфокусировки и положения пикселя, не представляет собой пиксель обнаружения фокуса.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Первый вариант осуществления настоящего изобретения описывается ниже с ссылкой на фиг. 1-14.
КОНФИГУРАЦИЯ УСТРОЙСТВА ОБНАРУЖЕНИЯ ФОКУСА
Фиг. 1 представляет собой схему, изображающую конфигурацию устройства захвата изображения, имеющего устройство обнаружения фокуса, согласно настоящему варианту осуществления. На фиг. 1 ссылочная позиция 101 обозначает первую группу линз, которая размещается в передней части формирующего изображение объектива (оптической системы формирования изображения), и первая группа линз удерживается так, что эта группа может двигаться вперед/отводиться назад по направлению оптической оси. Ссылочная позиция 102 обозначает затвор, который имеет двойную функцию в качестве апертуры (диафрагмы), которая регулирует количество света во время съемки посредством регулировки размера ее отверстия и также функционирует в качестве затвора регулировки времени экспонирования во время съемки неподвижного изображения. Ссылочная позиция 103 обозначает вторую группу линз формирующего изображение объектива. Диафрагма/затвор 102 и вторая группа 103 линз как единое целое двигаются вперед/отводятся назад по направлению оптической оси, таким образом выполняя масштабирование (функцию изменения фокусного расстояния) вместе с операцией движения вперед/отведения назад первой группы 101 линз. Ссылочная позиция 105 обозначает третьею группу линз формирующего изображение объектива, которая регулирует величину расфокусировки посредством движения вперед/отведения назад по направлению оптической оси. Ссылочная позиция 106 обозначает оптический фильтр нижних частот, который представляет собой оптический элемент для уменьшения ложного цвета или муара, который появляется на захваченном изображении. Ссылочная позиция 107 обозначает элемент захвата изображения, сконфигурированный из датчика КМОП (комплементарный металл-оксидный полупроводник) и его периферийных схем. Двумерный однокристальный датчик цвета, в котором мозаичный фильтр основного цвета, имеющий матрицу Байера, образован на кристалле на принимающих свет пикселях, которые расположены m столбцами и n рядами, используется в качестве элемента 107 захвата изображения. Ссылочная позиция 111 обозначает привод изменения фокусного расстояния, который приводит в действие первую группу 101 линз - третью группу 105 линз для движения вперед/отведения назад по направлению оптической оси посредством вращения трубки с криволинейным пазом (не показана), таким образом выполняя операцию масштабирования. Ссылочная позиция 112 обозначает привод диафрагмы/затвора, который управляет размером отверстия диафрагмы/затвора 102 для регулировки количества света для съемки и также управляет временем экспозиции во время съемки неподвижного изображения. Ссылочная позиция 114 обозначает привод фокусировки, который приводит в действие третью группу 105 линз для движения вперед/отведения назад по направлению оптической оси, таким образом регулируя величину расфокусировки. Ссылочная позиция 115 обозначает электронную вспышку для освещения объекта во время съемки, и, хотя является предпочтительным устройство освещения вспышкой, которое использует ксеноновую лампу, также может использоваться устройство освещения, обеспечиваемое со светоизлучающим диодом (LED), который непрерывно излучает свет. Ссылочная позиция 116 обозначает блок подсветки AF, который проецирует изображение маски, имеющей шаблон заданного отверстия на поле объекта при помощи проекционного объектива, таким образом улучшая возможность обнаружения фокуса в отношении темного объекта или малоконтрастного объекта. Ссылочная позиция 121 обозначает центральный процессор (CPU), который выполняет различные типы управления основной частью устройства обнаружения фокуса. CPU 121 имеет арифметический блок, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), аналого-цифровой (A/D) преобразователь, цифроаналоговый (D/A) преобразователь, схему интерфейса связи и т.п. и, основываясь на заданной программе, хранимой в ROM, приводит в действие различные типы схем, включенных в устройство обнаружения фокуса, для исполнения последовательности операций, включающих в себя обнаружение фокуса, съемку, обработку изображения и запись. Кроме того, CPU 121 также служит в качестве блока генерирования изображения согласно настоящему изобретению.
Ссылочная позиция 122 обозначает схему управления электронной вспышкой, которая управляет освещением электронной вспышкой 115 синхронно с операцией съемки. Ссылочная позиция 123 обозначает схему приведения в действие подсветки, которая управляет освещением блока 116 подсветки AF синхронно с операцией обнаружения фокуса. Ссылочная позиция 124 обозначает схему приведения в действие элемента захвата изображения, которая управляет операцией захвата изображения элемента 107 захвата изображения, выполняет аналого-цифровое преобразование полученного сигнала изображения и посылает преобразованный сигнал на CPU 121. Ссылочная позиция 125 обозначает схему обработки изображения, которая выполняет обработку, такую как гамма-преобразование, интерполяция цвета и сжатие JPEG (алгоритм сжатия Объединенной группы экспертов в области фотографии) изображения, полученного элементом 107 захвата изображения. Ссылочная позиция 126 обозначает схему приведения в действие фокусировки, которая выполняет управление приведением в действие привода 114 фокусировки, основываясь на результате обнаружения фокуса, и регулирует величину расфокусировки посредством приведения в движение третьей группы 105 линз для движения вперед/отведения назад по направлению оптической оси. Ссылочная позиция 128 обозначает схему приведения в действие диафрагмы/затвора, которая выполняет управлением приведением в действие привода 112 диафрагмы/затвора, таким образом управляя раскрытием диафрагмы/затвора 102. Ссылочная позиция 129 обозначает схему приведения в действие изменения фокусного расстояния, которая приводит в действие привод 111 изменения фокусного расстояния в соответствии с операцией изменения фокусного расстояния фотографом. Ссылочная позиция 131 обозначает устройство отображения, такое как жидкокристаллический дисплей (LCD), которое отображает информацию, касающуюся режима съемки устройства обнаружения фокуса, изображение предварительного просмотра перед съемкой и изображение подтверждения после съемки, изображение, указывающее сфокусированное состояние во время обнаружения фокуса, и т.п. Ссылочная позиция 132 обозначает группу рабочих переключателей, которая включает в себя выключатель питания, выключатель спуска (спусковой механизм съемки), рабочий переключатель изменения фокусного расстояния, переключатель выбора режима съемки и т.п. Ссылочная позиция 133 обозначает съемную флэш-память, которая записывает изображение, которое было захвачено.
СТРУКТУРА ПИКСЕЛЕЙ ЗАХВАТА ИЗОБРАЖЕНИЯ
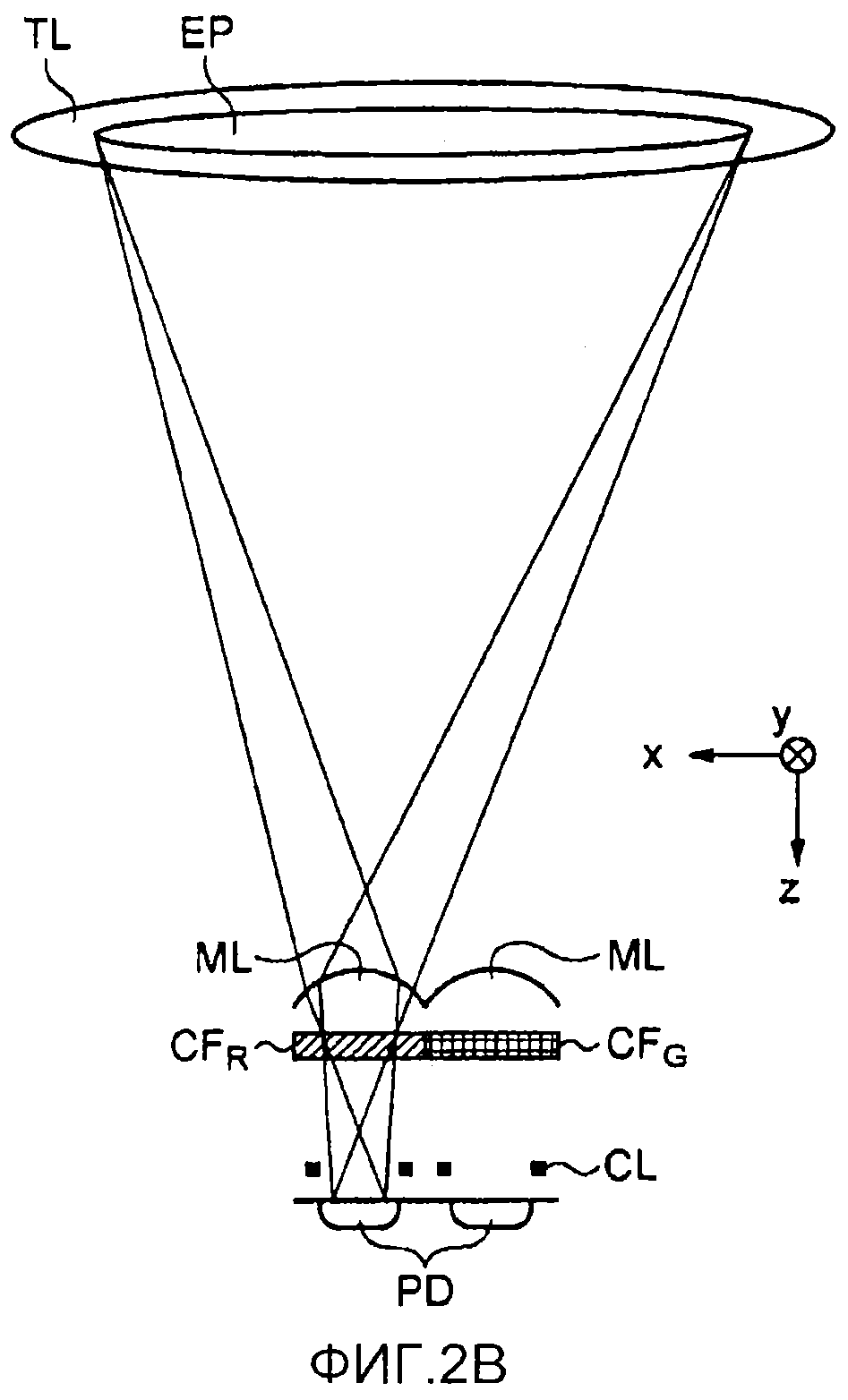
Фиг. 2A и 2B представляют собой диаграммы для объяснения структуры пикселей захвата изображения. Пиксели захвата изображения могут упоминаться как третья группа пикселей в настоящем варианте осуществления. Фиг. 2A и 2B изображают вид сверху и вид в разрезе соответственно, на которых увеличен участок пикселей захвата изображения. В настоящем варианте осуществления пиксели захвата изображения (пиксели G), имеющие спектральную чувствительность к G (зеленому цвету), располагаются в виде двух диагонально противоположных пикселей из четырех соседних пикселей, размещенных в два ряда и два столбца. Два пикселя захвата изображения (пиксель R и пиксель B), имеющие спектральную чувствительность к R (красному цвету) и B (синему цвету) соответственно, расположены в виде других двух пикселей. Т.е. в настоящем варианте осуществления описывается пример, в котором применяется матрица Байера. Кроме того, пиксели обнаружения фокуса, имеющие структуру, которая описывается ниже, повсюду располагаются в матрице Байера в соответствии с заданным правилом. Фиг. 2A представляет собой вид сверху пикселей захвата изображения, которые располагаются в середине элемента захвата изображения и размещены в двух рядах и двух столбцах. В матрице Байера пиксели G располагаются по диагональному направлению, и пиксели R и B располагаются в виде других двух пикселей. Затем повторяется это размещение из двух рядов и двух столбцов. Фиг. 2B изображает разрез по линии A-A на фиг. 2A. ML обозначает микролинзы на кристалле, которые располагаются перед каждым пикселем захвата изображения, CFR обозначает цветной фильтр R (красного цвета) и CFG обозначает цветной фильтр G (зеленого цвета). PD обозначает схематическое представление блока фотоэлектрического преобразования датчика КМОП, и CL обозначает слой разводки для формирования сигнальной линии, которая передает сигналы различных типов в датчике КМОП. TL обозначает схематическое представление формирующего изображение объектива. В данном случае, микролинза ML на кристалле и блок PD фотоэлектрического преобразования каждого пикселя захвата изображения выполнены так, чтобы захватывать световые лучи, проходящие через формирующий изображение объектив TL насколько возможно эффективным образом. Другими словами, выходной зрачок EP (также упоминаемый как область зрачка) формирующего изображение объектива TL и блок PD фотоэлектрического преобразования выполнены так, что быть сопряженными друг с другом посредством микролинзы ML, и блок фотоэлектрического преобразования разработан так, чтобы он имел большую эффективную область. Кроме того, хотя фиг. 2B иллюстрирует световые лучи, падающие на пиксель R, пиксели G и пиксель B также имеют подобную структуру. Поэтому, области пикселей захвата изображения R, G и B, где может приниматься свет, имеют большой диаметр и эффективно захватывают световые лучи от объекта, таким образом улучшая отношение сигнал-шум (S/N) сигнала изображения (третий сигнал изображения).
СТРУКТУРА ПИКСЕЛЕЙ ОБНАРУЖЕНИЯ ФОКУСА
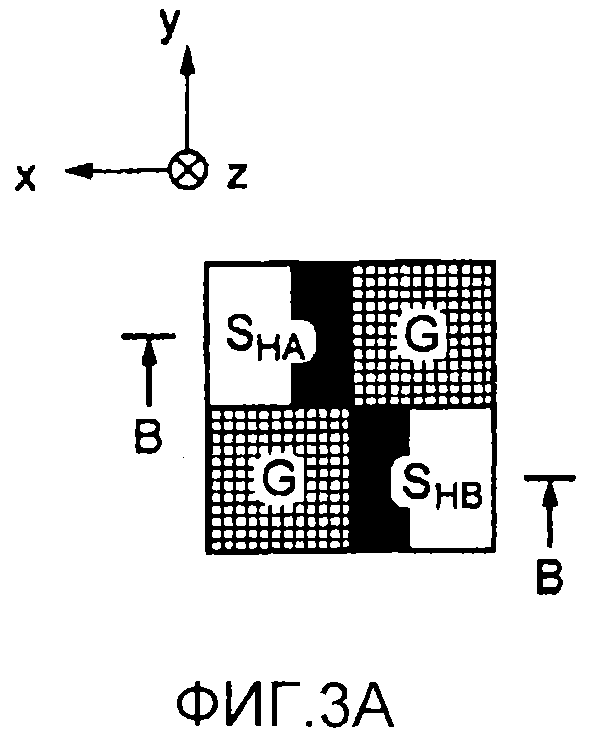
Фиг. 3A и 3B представляют собой диаграммы, объясняющие структуру пикселей обнаружения фокуса. В настоящем варианте осуществления пиксели обнаружения фокуса могут упоминаться как первая группа пикселей и вторая группа пикселей. Фиг. 3A и 3B изображают вид сверху и вид в разрезе соответственно, на которых увеличен участок пикселей обнаружения фокуса для выполнения разделения зрачка по направлению x формирующего изображение объектива TL на фиг. 3B. Фиг. 3A представляет собой вид сверху пикселей, которые располагаются в середине элемента захвата изображения и размещаются в двух рядах и двух столбцах, содержащих пиксели обнаружения фокуса. В случае, когда должен быть получен сигнал изображения, так как среди характеристик человека по распознаванию изображения люди чувствительны к информации о яркости, если отсутствует пиксель G, вероятно, что должно восприниматься ухудшение качества изображения. Таким образом, пиксели G обеспечивают основную составляющую информации о яркости. С другой стороны, пиксели R или пиксели B представляют собой пиксели захвата изображения для получения информации о цвете, и, так как люди являются нечувствительными к информации о цвете, даже когда отсутствует несколько пикселей R или пикселей B, которые получают информацию о цвете, маловероятно, что будет замечено ухудшение качества изображения. Таким образом, в настоящем варианте осуществления среди соседних пикселей захвата изображения, размещенных в два ряда и два столбца, пиксели G остаются в качестве пикселей захвата изображения, и пиксели обнаружения фокуса располагаются с некоторой частотой в положениях, соответствующих пикселю R и пикселю B. На фиг. 3A эти пиксели обозначены позициями SHA и SHB. Фиг. 3B изображает разрез, взятый по линии B-B на фиг. 3A. Микролинзы ML и блоки PD фотоэлектрического преобразования имеют конфигурацию, аналогичную конфигурации пикселей захвата изображения, показанных на фиг. 2B. Кроме того, так как разделение зрачка выполняется элементом захвата изображения, отверстия в слое CL разводки сдвигаются по направлению x относительно центральных линий микролинз ML. Конкретно, отверстие OPHA пикселя SHA обнаружения фокуса сдвигается в направлении -x, и, поэтому, принимают световые лучи, проходящие через выходной зрачок EPHA (первую область) на левой стороне формирующего изображение объектива TL на плоскости бумаги фиг. 3B. Аналогично, отверстие OPHB пикселя SHB сдвигается по направлению +x, и, поэтому, принимает световые лучи, проходящие через выходной зрачок EPHB (вторую область) на правой стороне формирующего изображение объектива TL на плоскости бумаги фиг. 3B. В данном случае, пиксели SHA обнаружения фокуса регулярно размещаются по направлению x, и первый сигнал изображения, получаемый группой этих пикселей SHA обнаружения фокуса, выражается как сигнал A изображения (первый сигнал изображения). Кроме того, пиксели SHB обнаружения фокуса также регулярно размещаются по направлению x, и второй сигнал изображения, получаемый группой этих пикселей SHB обнаружения фокуса, выражается как сигнал B изображения (второй сигнал изображения). Тогда можно вычислить величину расфокусировки формирующего изображение объектива из относительной величины сдвига изображения между сигналом A изображения и сигналом B изображения. Основываясь на результате вычисления, регулируется величина расфокусировки формирующего изображение объектива.
ПРИНЦИП РАЗДЕЛЕНИЯ ЗРАЧКА ЭЛЕМЕНТОМ ЗАХВАТА ИЗОБРАЖЕНИЯ
Фиг. 4 представляет собой диаграмму для концептуального объяснения разделения зрачка формирующего изображение объектива элементом захвата изображения настоящего варианта осуществления. TL обозначает формирующий изображение объектив, ссылочная позиция 107 обозначает элемент захвата изображения, OBJ обозначает объект, и IMG обозначает изображение объекта. Пиксели захвата изображения принимают световые лучи, проходящие через весь выходной зрачок EP формирующего изображение объектива, как описывается с использованием вида сверху вида в разрезе пикселей захвата изображения элемента захвата изображения на фиг. 2A и 2B. С другой стороны, пиксели обнаружения фокуса имеют функцию разделения зрачка, как описывается с использованием вида сверху и вида в разрезе пикселей обнаружения фокуса для выполнения разделения зрачка по направлению x на фиг. 3A. Конкретно, пиксель SHA на фиг. 3A принимает световые лучи, проходящие через сторону направления +x зрачка, или, другими словами, световые лучи, проходящие через область EPHA зрачка на фиг. 4. Кроме того, пиксель SHB на фиг. 3A принимает световые лучи, проходящие через сторону направления -x зрачка, или, другими словами, световые лучи, проходящие через область EPHB зрачка на фиг. 4. Пиксели обнаружения фокуса распределяются по всему элементу 107 захвата изображения, таким образом позволяя выполнять обнаружение фокуса по всей области захвата изображения. Необходимо отметить, что, хотя была описана конфигурация, подходящая для объекта, имеющего распределение яркости по направлению x, так как угловые характеристики приема света пикселей обнаружения фокуса имеет симметрию по направлению x, конфигурация, также подходящая для объекта, имеющего распределение яркости по направлению y, может быть достигнута посредством расширения этой же конфигурации также по направлению y.
РАСПРЕДЕЛЕНИЕ ИНТЕНСИВНОСТИ ПРИНЯТОГО СВЕТА ДАТЧИКА
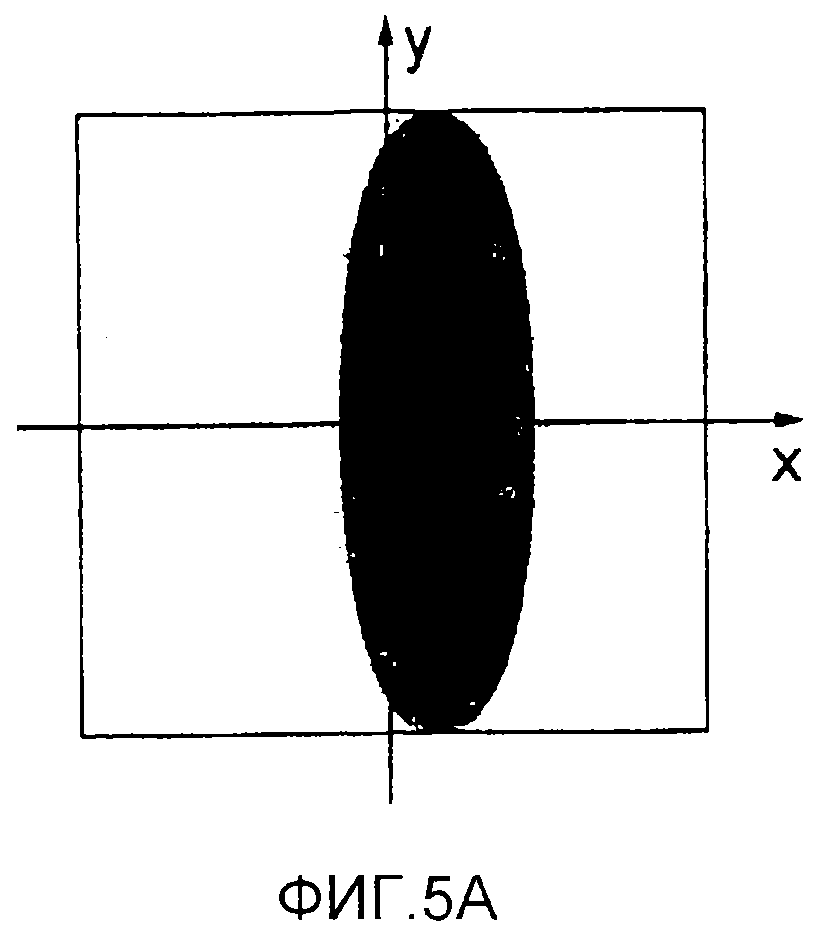
Распределение интенсивности света, который может быть принят пикселем, составляющим элемент захвата изображения, упоминается как распределение интенсивности принятого света. Фиг. 5A-5C представляют собой диаграммы, представляющие распределения интенсивности принятого света пикселей обнаружения фокуса и отображений, полученных из распределений интенсивности принятого света. Фиг. 5A изображает характеристики пикселя SHA обнаружения фокуса, и фиг. 5B изображает характеристики пикселя SHB обнаружения фокуса. Ось x и ось y на фиг. 5A-5C соответствуют оси x и оси y на фиг. 4. На фиг. 5A-5C более темный цвет обозначает более высокие интенсивности принятого света. На фиг. 3B, чтобы облегчить описание, выходной зрачок для пикселя SHA обнаружения фокуса и выходной зрачок для пикселя SHB обнаружения фокуса были отдельно изображены как EPHA и EPHB соответственно. Однако, как показано на фиг. 5A-5C, фактически световые лучи являются расплывчатыми и размытыми в результате дифракции, вызванной отверстиями из отверстия OPHA и отверстия OPHB, показанных на фиг. 3B, и принимающая свет область пикселя SHA обнаружения фокуса и принимающая свет область пикселя SHB обнаружения фокуса частично перекрываются. Фиг. 5C изображает отображения распределений интенсивности принятого света на фиг. 5A и 5B по направлению y. На фиг. 5C отображение фиг. 5A обозначается посредством FA, и отображение фиг. 5B обозначается посредством FB. Горизонтальная ось соответствует оси x на фиг. 5A и 5B, и вертикальная ось представляет интенсивность функции рассеяния линии. Начало O отсчета соответствует положению оптической оси формирующего изображение объектива. FA и FB являются, таким образом, приблизительно симметричными по направлению оси x относительно положения центроида по направлению оси x.
Распределение интенсивности зрачка и функция рассеяния линии, когда имеет место виньетирование
Ниже рассматривается состояние, при котором подсоединен формирующий изображение объектив. Распределение интенсивности света, который может быть принят пикселем, составляющим элемент захвата изображения на предполагаемой плоскости зрачка, упоминается как распределение интенсивностей зрачка. Фиг. 6A-6C представляют собой диаграммы, изображающие распределения интенсивности принятого света в случае, когда происходит виньетирование из-за формирующего изображение объектива, т.е. распределения интенсивности зрачка и функции рассеяния линии, полученные из этих распределений интенсивности зрачка, в противоположность распределениям интенсивности принятого света на фиг. 5A-5C. Фиг. 6A изображает характеристики распределения интенсивности зрачка пикселя SHA обнаружения фокуса, и фиг. 6B изображает характеристики распределения интенсивности зрачка пикселя SHB обнаружения фокуса в случае, когда происходит виньетирование из-за формирующего изображение объектива. Внутри распределений интенсивности зрачка пикселей SHA и SHB обнаружения фокуса, показанных на фиг. 5A-5C, только внутренняя часть форм, обозначенных посредством Область 1, представляет собой область, где пиксель SHA или SHB обнаружения фокуса принимает свет. Фиг. 6C представляет собой диаграмму, изображающую функции рассеяния линии в случае, когда имеет место виньетирование из-за формирующего изображение объектива. Фиг. 6C изображает отображения распределений интенсивности зрачка на фиг. 6A и 6B по направлению y, как в случае с фиг. 5C. Горизонтальная ось соответствует оси x на фиг. 5A и 5B, и вертикальная ось представляет интенсивность функции рассеяния линии. Начало O отсчета соответствует положению оптической оси формирующего изображение объектива. В данном случае является возможным, что распределение интенсивности точечного изображения, образованного на плоскости формирования изображения данным точечным источником света, проходящим через выходной зрачок оптической системы, т.е. так называемая функция рассеяния точки, представляет собой отображение уменьшенного размера формы выходного зрачка на формирующую изображение плоскость, если оптическая система является апланатической. Так как функция рассеяния линии представляет собой отображение функций рассеяния точки, отображение распределения интенсивности зрачка рассматривается как функция рассеяния линии. Как показано на фиг. 6C, в отношении пикселей обнаружения фокуса в середине элемента захвата изображения, функции LSFA и LSFB рассеяния линии приблизительно симметричны в отношении оптической оси (формы изображений приблизительно совпадают). Кроме того, каждая из функций LSFA и LSFB рассеяния линии является асимметричной по направлению оси x в отношении положения ее центроида по направлению оси x.
Конфигурация для обнаружения фокуса элемента 107 захвата изображения и схемы 124 приведения в действие элемента захвата изображения
Фиг. 7 представляет собой схему, схематически изображающую конфигурацию обнаружения фокуса элемента 107 захвата изображения и схемы 124 приведения в действие элемента захвата изображения на фиг. 1. Необходимо отметить, что блок преобразования A/D опускается на фиг. 7 для ясности описания. Элемент 107 захвата изображения имеет множество пикселей 901 обнаружения фокуса, составленных пикселями 901a обнаружения фокуса и пикселями 901b обнаружения фокуса, которые были описаны с использованием фиг. 3A и 3B. Каждый пиксель 901a обнаружения фокуса соответствует пикселю SHA обнаружения фокуса, и каждый пиксель 901b обнаружения фокуса соответствует пикселю SHB обнаружения фокуса. Кроме того, элемент 107 захвата изображения включает в себя множество пикселей захвата изображения для фотоэлектрического преобразования изображения объекта, образованного формирующим изображение объективом. Схема 124 приведения в действие элемента захвата изображения включает в себя блок 902 объединения и блок 903 сцепления. Схема 124 приведения в действие элемента захвата изображения назначает множество секций (областей) CST плоскости захвата изображения элемента 107 захвата изображения, так что множество пикселей 901 обнаружения фокуса содержится в каждой секции. Кроме того, схема 124 приведения в действие элемента захвата изображения может изменять размер, размещение, количество и т.п. секций CST. Блок 902 объединения выполняет обработку для получения первого составного сигнала одного пикселя посредством объединения сигналов, выводимых с пикселей 901a обнаружения фокуса в каждой из множества секций CST, назначенных на элементе 107 захвата изображения. Блок 902 объединения также выполняет обработку для получения второго составного сигнала одного пикселя посредством объединения сигналов, выводимых с пикселей 901b обнаружения фокуса в каждой секции CST. Блок 903 сцепления выполняет обработку для получения первого сцепленного сигнала посредством сцепления пикселей обнаружения фокуса, которые представляют собой первые составные сигналы, и обработку для получения второго сцепленного сигнала посредством сцепления вторых составных сигналов в отношении множества секций CST. Таким образом, сцепленные сигналы, в которых сцеплено столько пикселей обнаружения фокуса, сколько число секций, получаются для пикселей 901a обнаружения фокуса и для пикселей 901b обнаружения фокуса соответственно. CPU 121 вычисляет величину расфокусировки формирующего изображение объектива, основываясь на первом сцепленном сигнале и втором сцепленном сигнале. Так как сигналы, выводимые с пикселей обнаружения фокуса одного и того же направления разделения зрачка, которые размещены в секциях, объединяются таким образом, даже в случае, когда яркость индивидуальных пикселей 901 обнаружения фокуса является малой, можно в достаточной степени обнаруживать распределение яркости объекта.
Сигнал изображения, выводимый с элемента 107 захвата изображения
Фиг. 8 изображает пару сигналов изображения, которая формируется пикселями 901 обнаружения фокуса, блоком 902 объединения и блоком 903 сцепления на фиг. 7, и которая посылается на CPU 121. На фиг. 8 горизонтальная ось представляет направление, по которому выравниваются пиксели сцепленных сигналов, и вертикальная ось представляет интенсивность сигнала. Сигнал 430a изображения формируется пикселями 901a обнаружения фокуса, и сигнал 430b изображения формируется пикселями 901b обнаружения фокуса. Фокусное расстояние формирующего изображение объектива находится в состоянии расфокусировки, и, поэтому, сигнал 430a изображения сдвигается влево, и сигнал 430b изображения сдвигается вправо. Эта величина сдвига изображения между сигналами 430a и 430b изображения вычисляется операцией сопоставления, и, таким образом, можно найти величину расфокусировки формирующего изображение объектива. В данном случае, в соответствии с обнаружением фокуса настоящего варианта осуществления, так как виньетирование из-за формирующего изображение объектива вызывает то, что функции рассеяния линии являются асимметричными в отношении центроида, как описывается с использованием фиг. 6A-6C, сигнал A изображения и сигнал B изображения, полученные с пикселей обнаружения фокуса, также становятся асимметричными. Другими словами, уменьшается совпадение изображений. При обнаружении фокусировки с использованием способа обнаружения фазовой разности, когда является низким совпадение изображений (асимметрия), нельзя точно вычислить величину расфокусировки. В настоящем изобретении эта проблема решается посредством коррекции асимметрии между полученными сигналами изображения во время обнаружения фокуса.
АСИММЕТРИЯ МЕЖДУ СИГНАЛАМИ ИЗОБРАЖЕНИЯ
Ниже в данном документе подробно описывается причина, что сигналы изображения становятся асимметричными, и коррекция асимметрии.
Теперь, когда распределение количества света объекта выражается как f(x, y) и распределение количества света сигнала изображения выражается как g(x, y), выполняется зависимость (свертка)

где h(a, b) представляет собой передаточную функцию, выражающую состояние, в котором ухудшаются характеристики объекта в системе формирования изображения, и называется функция рассеяния точки. Поэтому, чтобы найти пару сигналов изображения для использования при обнаружении фокуса, необходимо найти функцию рассеяния точки. В данном случае, при обнаружении фокуса, которое использует способ обнаружения сдвига изображения, внимание обращается на одномерное направление пары сигналов изображения для вычисления величины расфокусировки. По этой причине можно оценить систему изображения, относящуюся к обнаружению фокуса, используя функцию рассеяния линии, которая является одномерной функцией, вместо двумерной функции рассеяния точки. Поэтому, когда распределение количества света объекта заменяется на f(x) и распределение количества света сигнала изображения заменяется на g(x), вышеупомянутая формула (1) может быть переписана с использованием функции L(a) рассеяния линии в следующую формулу:
Кроме того, зависимость между функцией рассеяния точки и функцией рассеяния линии может быть выражена в виде следующей формулы (3):
Как описано выше, возможно, что распределение интенсивности точечного изображения, которое образовано на плоскости формирования изображения данным точечным источником света, проходящим через выходной зрачок оптической системы, т.е. так называемая функция рассеяния точки представляет собой отображение уменьшенного размера формы выходного зрачка на плоскость формирования изображения, если оптическая система является апланатической. Поэтому, функция h(a, b) рассеяния точки может быть заменена распределением интенсивности зрачка. Кроме того, из формулы (3) возможно, что функция рассеяния линии представляет собой отображение распределения интенсивности зрачка. Поэтому, в отношении фиг. 5A-5C и 6A-6C, отображения распределений интенсивности зрачка были приняты в качестве функций рассеяния линии. Таким образом, из формулы (2) асимметричные функции LSFA' и LSFB' рассеяния линии, описанные на фиг. 6A-6C, индивидуально свертываются в изображение объекта настоящего варианта осуществления, и пара сигналов изображения являются, поэтому, асимметричными. В случае, когда пара сигналов изображения для использования в операции сопоставления является асимметричной, как описано выше, точность вычисления фокусного расстояния также является низкой. Чтобы повысить точность вычисления фокусного расстояния, является эффективным коррекция асимметрии между парой сигналов изображения, таким образом увеличивая совпадение изображений.
СПОСОБ КОРРЕКЦИИ АСИММЕТРИИ МЕЖДУ СИГНАЛАМИ ИЗОБРАЖЕНИЯ
Ниже описывается способ коррекции асимметрии между сигналами изображения во время обнаружения фокуса. В данном случае сигнал изображения, полученный с пикселей 901a обнаружения фокуса на фиг. 7, упоминается как сигнал ImgA изображения, и сигнал изображения, полученный с пикселей 901b обнаружения фокуса, упоминается как сигнал ImgB изображения. Как описано выше, асимметрия между сигналом ImgA изображения и сигналом ImgB изображения вызывается сверткой асимметричных функций LSFA'' и LSFB'' рассеяния линии.
Фиг. 9A-9I представляют собой концептуальные диаграммы для объяснения фильтрации модификации изображения для устранения асимметрии между сигналами изображения. На каждой из фиг. 9A-9I горизонтальная ось представляет направление, в котором выравниваются пиксели, и вертикальная ось представляет интенсивность сигнала изображения. Фиг. 9A изображает распределение Obj количества света объекта, и фиг. 9B и 9C изображают функции LSFA'' и LSFB'' рассеяния линии пикселя SHA обнаружения фокуса и пикселя SHB обнаружения фокуса соответственно. Фиг. 9D и 9E изображают сигнал ImgA изображения и сигнал ImgB изображения, каждый из которых имеет форму, как показано на фигуре, когда функция LSFA'' рассеяния линии или функция LSFB'' рассеяния линии свертывается с распределением Obj количества света объекта. Фиг. 9F изображает фильтр FilA модификации изображения для сигнала ImgA изображения. Фиг. 9G изображает фильтр FilB модификации изображения для сигнала ImgB изображения. Фиг. 9H изображает сигнал ReImgA модифицированного изображения, полученный посредством свертки фильтра FilA модификации изображения с сигналом ImgA изображения. Фиг. 9I изображает сигнал ReImgB модифицированного изображения, полученный посредством свертки фильтра FilB модификации изображения с сигналом ImgB изображения. Как показано на фиг. 9H и 9I, модифицированные изображения имеют одинаковую форму.
Ниже описывается принцип, посредством которого модифицированные изображения имеют одинаковую форму. Сигнал ImgA изображения получается по вышеописанной формуле (2). Когда модифицированное изображение ReImgA, полученное посредством свертки фильтра FilA модификации изображения с полученным сигналом ImgA изображения, выражается как k(x), k(x) может быть получено следующим образом:

Когда модифицированное изображение ReImgB вычисляется аналогичным образом, получается

Из вышеупомянутых формул (4) и (5) полученные ReImgA и ReImgB равны друг другу, и можно вычислить величину расфокусировки посредством выполнения операции сопоставления, используя ReImgA и ReImgB.
КОРРЕКЦИЯ ПИКСЕЛЯ ОБНАРУЖЕНИЯ ФОКУСА
Ниже генерируется захваченное изображение из сигналов изображения пикселей обнаружения фокуса. Обычно сигналы изображения пикселей обнаружения фокуса, такие как SHA и SHB на фиг. 3A и 3B, не могут использоваться «как есть» при генерировании изображения. По этой причине в настоящем варианте осуществления коррекция пикселей обнаружения фокуса выполняется с использованием вычисленной величины расфокусировки, и, таким образом, получается подходящее захваченное изображение.
Сначала описывается разность в сигналах изображения пикселей захвата изображения и пикселей обнаружения фокуса между сфокусированным состоянием и состоянием расфокусировки. Фиг. 10 представляет собой диаграмму, иллюстрирующую штриховые изображения пикселей R или пикселей G, как показано на фиг. 2, в центральной части экрана в сфокусированном состоянии и состоянии расфокусировки. E11(i) обозначает сигнал, выводимый в сфокусированном состоянии, и E12(i) обозначает штриховое изображение в состоянии расфокусировки. Предполагая, что сигнал изображения, подобный E11(i), получается в сфокусированном состоянии, выходной результат пикселя захвата изображения, подобный E12(i), получается в состоянии расфокусировки. В данном случае, накопленные количества света E11(i) и E12(i) равны друг другу, и, поэтому, справедлива следующая зависимость:

Фиг. 11 представляет собой диаграмму, иллюстрирующую штриховые изображения пикселей SHA или пикселей SHB, как показано на фиг. 3A и 3B, в центральной части экрана в сфокусированном состоянии и в состоянии расфокусировки. E21(i) обозначает сигнал изображения в сфокусированном состоянии, и E22(i) обозначает штриховое изображение в состоянии расфокусировки. В отличие от пикселей захвата изображения, отверстия пикселей SHA или SHB обнаружения фокуса частично прикрываются, и, поэтому, сигнал изображения меньше сигнала E11(i) изображения на фиг. 10. Предполагая, что сигнал, выводимый подобно E21(i), получается в сфокусированном состоянии, сигнал изображения, подобный E22(i), получается в состоянии расфокусировки. Кроме того, как и на фиг. 10, накопленные количества света E21(i) и E22(i) равны друг другу. Однако, в отличие от фиг. 10, в состоянии расфокусировки сигнал изображения является не только расплывчатым и размытым. Рассматривая единственный пиксель, отверстие пикселя SHA или SHB обнаружения фокуса на фиг. 3A и 3B сдвигается влево или вправо от оптической оси. Следовательно, в состоянии расфокусировки сторона отверстия становится расплывчатой и размытой в большей степени, и полученный сигнал изображения сдвигается на величину δ в направлении пикселей. Как описано выше, способ, посредством которого сигнал изображения становится расплывчатым, различается между пикселями захвата изображения и пикселями обнаружения фокуса из-за различия в отверстиях. Таким образом, в настоящем варианте осуществления эта величина δ сдвига, которая зависит от величины расфокусировки, используется для оценки оптимального пикселя для коррекции. Затем выполняется коррекция посредством умножения полученных сигналов изображения на коэффициент усиления, таким образом генерируя подходящие изображения (первый скорректированный сигнал изображения и второй скорректированный сигнал изображения), которые эквивалентны сигналу пикселей захвата изображения.
Фиг. 12 представляет собой диаграмму, иллюстрирующую коррекцию пикселей обнаружения фокуса. LSF(i, δ) обозначает штриховое изображение пикселей захвата изображения в состоянии расфокусировки, в котором величина сдвига равна δ, и LSF'(i, δ) обозначает штриховое изображение пикселей обнаружения фокуса в состоянии расфокусировки, в котором величина сдвига равна δ. LSF'(a, δ) обозначает штриховое изображение на i=a-м пикселе обнаружения фокуса, LSF'(a+δ, δ) обозначает штриховое изображение на i=(a+δ)-м пикселе обнаружения фокуса, и LSF(a, δ) обозначает штриховое изображение на i=a-м пикселе захвата изображения. Кроме того, E22(a+δ) обозначает сигнал изображения i=(a+δ)-го пикселя обнаружения фокуса, и E3(a) обозначает сигнал изображения i=a-го пикселя обнаружения фокуса после коррекции.
Сначала вычисляется величина δ сдвига, вызванная пикселями обнаружения фокуса, из величины расфокусировки, которая может быть найдена посредством известной операции сопоставления. Коэффициент G усиления для использования при коррекции вычисляется на основе этой величины δ сдвига, и получается сигнал изображения, умножаемый на коэффициент G усиления. Сначала получается коэффициент G усиления. Этот коэффициент G усиления может быть выражен с использованием положения i пикселя и величины δ сдвига, вычисленные из величины расфокусировки. Если коэффициент G усиления выражается как формула, формула может быть выражена аналогично следующей формуле (7):

В данном случае, штриховые изображения LSF(i, δ) и LSF'(i, δ) представляют собой значения, вычисленные посредством моделирования с использованием величины δ сдвига или других значений, сохраненных заранее в виде таблицы данных. Затем получается сигнал E22(a+δ) изображения, полученный из величины δ сдвига. Затем перемножаются коэффициент G(i, δ) усиления и E22(a+δ), таким образом вычисляя сигнал E3(a) для генерирования изображения.

В первом варианте осуществления настоящего изобретения была описана коррекция пикселей обнаружения фокуса в центральной части экрана при высоте x=0 экрана. Эта же идея также может быть применена к периферийной части экрана.
Последовательность вычислительных операций обработки генерирования изображения
Ниже описывается последовательность операций обработки генерирования изображения согласно первому варианту осуществления, используя блок-схемы последовательности операций на фиг. 13 и 14. Необходимо отметить, что операции в последовательности операций, изображенной на фиг. 13 и 14, выполняются посредством CPU 121.
Сначала описывается блок-схема последовательности операций съемки на фиг. 13, которая представляет собой основную процедуру. На этапе S1 получается информация об объективе для нахождения состояния виньетирования, вызванного формирующим изображение объективом. На этапе S2 обнаруживается, что была нажата SW1. SW1 в данном документе ссылается на первую стадию нажатия кнопки спуска затвора. В результате нажатия SW1 выполняется обнаружение фокуса на этапе S3. На этапе S3 выполняется коррекция затемнения, коррекция фона изображения и коррекция, которая требуется при обнаружении фокуса в случае, когда пиксели обнаружения фокуса размещаются на элементе захвата изображения, как в настоящем варианте осуществления. При обнаружении фокуса, как описано в настоящем варианте осуществления, сигналы изображения для использования при обнаружении фокусировки становятся асимметричными. Таким образом, выполняется коррекция для уменьшения асимметрии, как описано выше. После того как будут выполнены эти различные типы коррекции, выполняется обнаружение фокуса для устранения величины расфокусировки.
На этапе S4, основываясь на величине расфокусировки, вычисленной на этапе S3, формирующий изображение объектив приводится в действие, так что главный объект находится в фокусе. На этапе S5 обнаруживается, что были нажата SW2. SW2 в данном документе ссылается на вторую стадию нажатия кнопки спуска затвора. На этапе S6 в результате нажатия SW2 зеркало поднимается, и световые лучи принимаются элементом 107 захвата изображения, и, таким образом, получается изображение. На этапе S7 выполняется коррекция дефектного пикселя и пикселей обнаружения фокуса во время генерирования изображения, и генерируется изображение. На этапе S8 изображение, скорректированное на этапе S7, получается и сохраняется в флэш-памяти 133. Таким образом, последовательность операций съемки завершается.
Ниже описывается подпроцедура генерирования скорректированного изображения на этапе S7, используя фиг. 14. На этапе S101 информация о пикселе, подлежащем коррекции, получается из изображения, полученного на этапе S6 последовательности операций съемки на фиг. 13. Эта информация о пикселе, подлежащем коррекции, содержит высоту (x, y) изображения, величину δ сдвига, которая зависит от величины расфокусировки, и номер i пикселя, подлежащего коррекции. На этапе S102 определяется, является ли пиксель, подлежащий коррекции, который был получен на этапе S101, пикселем обнаружения фокуса. Если пиксель, подлежащий коррекции, является пикселем обнаружения фокуса, обработка переходит на этап S104, и коррекция выполняется с использованием величины расфокусировки и информации о положении пикселя. Если пиксель, подлежащий коррекции, является дефектным пикселем захвата изображения, обработка переходит на этап S103, и выполняется коррекция. Этап S103 представляет собой обработку в случае, когда определяется на этапе S102, что пиксель, подлежащий коррекции, представляет собой дефектный пиксель захвата изображения. Выполняется коррекция дефектных пикселей захвата изображения с использованием известного процесса коррекции. Например, выполняется интерполяция с использованием соседних пикселей, или процесс коррекции коэффициента усиления, процесс коррекции смещения или т.п.
Этап S104 представляет собой обработку в случае, когда определяется на этапе S102, что пиксель, подлежащий коррекции, представляет собой пиксель обнаружения фокуса. На этапе S3 последовательности операций съемки на фиг. 13 получается величина расфокусировки, которая требуется для коррекции изображения пикселя обнаружения фокуса. На этапе S105 вычисляется величина δ сдвига положения пикселя, используя значение диафрагмы, полученное на этапе S1 последовательности операций съемки на фиг. 13, величину расфокусировки, полученную на этапе S104, и информацию о положении пикселя, подлежащего коррекции, полученную на этапе S101. На этапе S106 выполняется коррекция пикселя обнаружения фокуса во время генерирования изображения, и генерируется изображение. Выходной результат пикселя для использования при коррекции получается из величины δ сдвига положения пикселя, вычисленной на этапе S105. Затем в отношении полученного выходного результата пикселя выполняется процесс коррекции коэффициента усиления с использованием коэффициента G усиления, который задается значением диафрагмы, полученным на этапе S1 последовательности операций съемки на фиг. 13, величины расфокусировки, полученной на этапе S104, информации о пикселе, подлежащем коррекции, полученной на этапе S101, и информации об объективе, полученной на этапе S1 на фиг. 13.
На этапе S107, если было закончено вычисление коррекции для всех пикселей, подлежащих коррекции, обработка переходит на этап S108, и генерируется изображение, тогда как, если еще не было закончено вычисление коррекции, обработка возвращается на этап S102, и выполняется последовательность операций обработки коррекции изображения. На этапе S108 генерируется скорректированное изображение, используя сигнал изображения, после того как будет выполнена обработка коррекции до этапа S107, и сигнал изображения пикселей захвата изображения. Таким образом, завершается последовательность операций процесса для генерирования скорректированного изображения, и обработка возвращается на этап S8 последовательности операций съемки на фиг. 13.
Как описано выше, согласно первому варианту осуществления можно выполнять коррекцию изображения, используя величину расфокусировки, высоту изображения, номер пикселя, значение диафрагмы и т.п., и, таким образом, получать подходящее скорректированное изображение. Необходимо отметить, что, хотя способ обнаружения сдвига изображения использовался для операции коррекции в первом варианте осуществления, этот же результат может быть получен даже тогда, когда используются другие способы.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Второй вариант осуществления представляет собой разновидность первого варианта осуществления.
Обработка в соответствии с величиной δ сдвига положения пикселя
В первом варианте осуществления был описан случай, в котором пиксель, который получается с использованием величины δ сдвига положения пикселя, вычисленной из величины расфокусировки, высоты изображения, номера пикселя и значения диафрагмы, представляют собой пиксель обнаружения фокуса. Однако полученным пикселем не всегда обязательно является пиксель обнаружения фокуса. По этой причине отличительным признаком второго варианта осуществления является то, что, если полученный пиксель не является пикселем обнаружения фокуса, выходной результат пикселя в положении пикселя получается из соседних пикселей обнаружения фокуса посредством интерполяции для генерирования изображения. Ниже описывается второй вариант осуществления, используя фиг. 15. Необходимо заметить, что операции в последовательности операций на фиг. 15 исполняются посредством CPU 121. Так как этапы обнаружения фокуса и съемки устройства захвата изображения согласно второму варианту осуществления являются подобными этапам в первом варианте осуществления, их описание опускается.
Фиг. 15 представляет собой схему, касающуюся настоящего варианта осуществления, т.е. второго варианта осуществления. Фиг. 15 изображает последовательность операций, в которой определение является ли или нет пиксель, полученный из величины δ сдвига положения пикселя, пикселем обнаружения фокуса, добавляется к последовательности операций на фиг. 14.
Так как этапы S201-S205 являются подобными этапам на фиг. 14, которые использовались при описании первого варианта осуществления, их описание опускается. На этапе S206 выходной результат пикселя в положении, используемом для коррекции, получается из величины δ сдвига положения пикселя, которая была вычислена на этапе S205, и определяется, является ли или нет этот пиксель пикселем обнаружения фокуса. Если полученный пиксель является пикселем обнаружения фокуса, обработка переходит на этап S208, и выполняется такая же обработка, что и на этапе S106 на фиг. 14. Если полученный пиксель не является пикселем обнаружения фокуса, обработка переходит на этап S207, и вычисляется выходной результат пикселя для коррекции. Этап S207 выполняется в случае, когда пиксель в положении, вычисленном на этапе S206, не является пикселем обнаружения фокуса. Сначала информация о положении и информация выходного результата о нескольких пикселях обнаружения фокуса вблизи положения пикселя, подлежащего использованию для коррекции, получаются из величины δ сдвига положения пикселя. Затем из полученной информации получается выходной результат пикселя в положении пикселя, подлежащего использованию для коррекции, используя известный процесс интерполяции, такой как линейная интерполяция или бикубическая интерполяция.
На этапе S208 коррекция пикселя обнаружения фокуса во время генерирования изображения выполняется, как и на этапе S106 на фиг. 13. Если определяется из величины δ сдвига положения пикселя на этапе S206, что пикселем в положении, подлежащем использованию для коррекции, является пиксель обнаружения фокуса, получается выходной результат этого пикселя обнаружения фокуса. Если определяется на этапе S206, что пикселем не является пиксель обнаружения фокуса, используется выходной результат пикселя, вычисленный на этапе S207. Затем в отношении полученного выходного результата пикселя выполняется процесс коррекции коэффициента усиления с использованием коэффициента G усиления, который задается значением диафрагмы, полученным на этапе S1 последовательности операций съемки на фиг. 13, величины расфокусировки, полученной на этапе S104, информации о пикселе, подлежащем коррекции, полученным на этапе S101, и информации об объективе, полученной на этапе S1 на фиг. 13.
На этапе S209, если было завершено вычисление коррекции для всех пикселей, подлежащих коррекции, обработка переходит на этап S210, и генерируется изображение, тогда как, если еще не было завершено вычисление коррекции, обработка возвращается на этап S202, и выполняется последовательность операций обработки коррекции изображения. На этапе S210 генерируется скорректированное изображение с использованием сигнала изображения, после того будет выполнена обработка коррекции до этапа S209, и сигнала изображения пикселей захвата изображения. Таким образом, завершается последовательность операций процесса генерирования скорректированного изображения, и обработка возвращается на этап S8 последовательности операций съемки на фиг. 13.
Как описано выше, согласно второму варианту осуществления можно выполнять коррекцию изображения, используя величину расфокусировки, высоту изображения, номер пикселя, значение диафрагмы и т.п., и, таким образом, получать подходящее скорректированное изображение. Необходимо заметить, что, хотя способ обнаружения сдвига изображения использовался для операции сопоставления во втором варианте осуществления, этот же результат может быть получен даже тогда, когда используются другие способы.
Хотя настоящее изобретение было описано с ссылкой на примерные варианты осуществления, необходимо понять, что изобретение не ограничивается описанными примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации, чтобы охватывать все такие модификации и эквивалентные конструкции и функции.
Данная заявка претендует на привилегии заявки на патент Японии № 2011-001393, поданной 6 января 2011 г., которая настоящим включена по ссылке в данный документ во всей своей полноте.
Реферат
Изобретение относится к устройству захвата изображения с автофокусом. Устройство включает средство захвата изображения, имеющее первую, вторую и третью группу пикселей и средство обнаружения фокуса для вычисления величины расфокусировки. Средство генерирования изображения корректирует первый и второй сигналы изображения, чтобы они были эквивалентными третьему сигналу изображения, основываясь на величине расфокусировки. Технический результат - коррекция изображения в состоянии расфокусировки. 2 з.п. ф-лы, 29 ил.
Формула
средство захвата изображения, имеющее первую группу пикселей, которая принимает световой луч, проходящий через первую область в выходном зрачке формирующего изображение объектива, который формирует изображение объекта, вторую группу пикселей, которая принимает световой луч, проходящий через вторую область в выходном зрачке формирующего изображение объектива, причем вторая область отличается от первой области, и третью группу пикселей, которая принимает световой луч, проходящий через всю область в выходном зрачке формирующего изображение объектива;
средство обнаружения фокуса для вычисления величины расфокусировки формирующего изображение объектива, используя первый сигнал изображения, полученный от первой группы пикселей, и второй сигнал изображения, полученный от второй группы пикселей; и
средство генерирования изображения для коррекции первого сигнала изображения и второго сигнала изображения, полученных от первой группы пикселей и второй группы пикселей средства захвата изображения, чтобы они были эквивалентными третьему сигналу изображения, полученному от третьей группы пикселей, и которое генерирует захваченное изображение, используя первый скорректированный сигнал изображения, второй скорректированный сигнал изображения и третий сигнал изображения,
причем средство генерирования изображения корректирует первый сигнал изображения и второй сигнал изображения, основываясь на величине расфокусировки, вычисленной средством обнаружения фокуса, используя первый сигнал изображения и второй сигнал изображения, и получает первый скорректированный сигнал изображения и второй скорректированный сигнал изображения.
Комментарии