Системы спиральной кт и способы реконструкции - RU2595312C1
Код документа: RU2595312C1
Чертежи




Описание
Область техники, к которой относится изобретение
Варианты осуществления изобретения в целом относятся к визуализации посредством излучения и, в частности, к системе компьютерной томографии (КТ) с большим шагом и к способу реконструкции для такой системы.
Уровень техники
Системы КТ для досмотра багажа играют важную роль при обнаружении взрывчатых веществ и широко применяются в общественных местах, таких как аэропорты, вокзалы и т.д. Основной задачей системы обнаружения с использованием метода КТ является получение проекционных данных о багаже путем сканирования, получение его томографических изображений с помощью алгоритма реконструкции, идентификация взрывчатых веществ на основе алгоритма идентификации и выдача сигнала оповещения. Сканирование осуществляется за счет вращения контактного кольца, установленного вместе с источником рентгеновского излучения и детекторами, при одновременном перемещении объекта по ленте, и поэтому траектория сканирования является спиральной. Для соответствия требованиям станций досмотра по пропускной способности для багажа скорость перемещения ленты должна достигать определенного предельного значения, например 0,3 м/с - 0,5 м/с. Для того чтобы собрать все проекционные данные, необходимые для реконструкции изображений, нужно увеличить скорость вращения контактного кольца или увеличить количество рядов детекторов. Для соблюдения механической интенсивности и устойчивости скорость вращения контактного кольца нельзя увеличивать бесконечно. С другой стороны, с точки зрения предельного значения угла конуса источника рентгеновского излучения и расходов на детекторы количество рядов детекторов также нельзя увеличивать бесконечно. В целом с учетом указанных выше различных факторов наиболее эффективным способом увеличения пропускной способности для багажа является лишь увеличение шага сканирования.
На протяжении последних лет был достигнут ряд существенных результатов в области алгоритмов реконструкции для спиральной КТ, например алгоритм Кацевича, PI-алгоритм, алгоритм CB-FBP и т.п. Однако все алгоритмы должны удовлетворять определенному условию шага, и увеличение шага и угла конуса приводит к потере проекционных данных, увеличению ошибки в результатах реконструкции или даже появлению артефактов. Для того чтобы качество изображений соответствовало требованиям, коэффициент изменения шага в целом не должен превышать 1,5.
В системах досмотра на основе метода КТ выполнение алгоритма реконструкции в реальном времени также является важным показателем. В соответствии с алгоритмом реконструкции фильтрация в неодномерной инвариантной относительно сдвига форме, обратное проецирование в геометрии конусного пучка с весовым коэффициентом расстояния, решение большого количества нелинейных уравнений и использование большого углового диапазона обратного проецирования будет обуславливать неэффективность алгоритма реконструкции, поэтому использования таких алгоритмов следует избегать. Следовательно некоторые из перечисленных выше алгоритмов реконструкции предусматривают стадии, которые влияют на эффективность алгоритмов, а также главным образом используются в случае, если проекционные данные являются полными или избыточными.
В заключение, проблема потери данных при условии большого шага в уровне техники в последнее время не рассматривалась, следовательно технологии предшествующего уровня техники нельзя непосредственно использовать в системе КТ с большим шагом.
Раскрытие изобретения
С учетом одной или нескольких проблем, свойственных предшествующему уровню техники, предлагается система спиральной КТ и способ реконструкции для такой системы, которые удовлетворяют требованиям, выдвигаемым к реконструкции изображений при условии большого шага.
В соответствии с одним аспектом изобретения предлагается способ реконструкции для системы спиральной компьютерной томографии (КТ) в геометрии конусного пучка, предусматривающий стадии: вычисления минимального количества рядов детекторов, требуемого для покрытия окна Тама согласно шагу системы спиральной КТ в геометрии конусного пучка и межрядному интервалу для множества рядов детекторов; компенсации утерянных проекционных данных за счет взвешивания дополнительных проекционных данных в случае, если количество рядов детекторов системы спиральной КТ в геометрии конусного пучка меньше минимального количества рядов детекторов; пересортировки данных конусного пучка в данные параллельных конусных пучков; реализации взвешивания косинуса угла конуса по пересортированным данным параллельных конусов, а затем реализации одномерной фильтрации по данным вдоль направления ряда виртуальных детекторов, образованных во время пересортировки проекционных данных, в данные параллельных пучков; и реализации обратного проецирования в геометрии параллельных конусных пучков без взвешивания по отфильтрованным данным для получения восстановленных изображений.
В соответствии с другим аспектом изобретения предлагается система спиральной компьютерной томографии (КТ) в геометрии конусного пучка, содержащая: средства для вычисления минимального количества рядов детекторов, требуемого для покрытия окна Тама согласно шагу системы спиральной КТ в геометрии конусного пучка и межрядному интервалу для множества рядов детекторов; средства для компенсации утерянных проекционных данных за счет взвешивания дополнительных проекционных данных в случае, если количество рядов детекторов системы спиральной КТ в геометрии конусного пучка меньше минимального количества рядов детекторов; средства для пересортировки дополненных проекционных данных в данные параллельных пучков с углом конуса; средства для выполнения взвешивания косинуса угла конуса по пересортированным данным параллельных конусов, а затем выполнения одномерной фильтрации по данным вдоль направления ряда виртуальных детекторов, образованных во время пересортировки проекционных данных в данные параллельных пучков; и средства для выполнения обратного проецирования в геометрии параллельных конусных пучков без взвешивания по отфильтрованным данным для получения восстановленных изображений.
Согласно некоторым вариантам осуществления с помощью указанных выше решений скорость движения ленты можно увеличить в несколько раз, если существующая область с детекторами и существующая скорость контактного кольца остаются неизменными, тем самым повышая пропускную способность для багажа и сохраняя качество восстановленных изображений неизменными.
Краткое описание чертежей
Для более глубокого понимания изобретения далее варианты осуществления изобретения будут описаны подробно со ссылкой на прилагаемые чертежи.
На фиг. 1 показана схема сканирования по спиральной траектории в системе КТ в соответствии с одним вариантом осуществления изобретения, где серая область на детекторах представляет собой окно Тама;
на фиг. 2 показано определение пары сопряженных лучей при сканировании веерным пучком в соответствии с одним вариантом осуществления изобретения;
на фиг. 3 показана принципиальная схема компьютерного томографа в соответствии с одним вариантом осуществления изобретения;
на фиг. 4 показана принципиальная блок-схема вычислительного процессора, показанного на фиг. 3;
на фиг. 5 показана принципиальная блок-схема контроллера в соответствии с одним вариантом осуществления изобретения;
на фиг. 6 показана схема способа реконструкции в соответствии с одним вариантом осуществления изобретения;
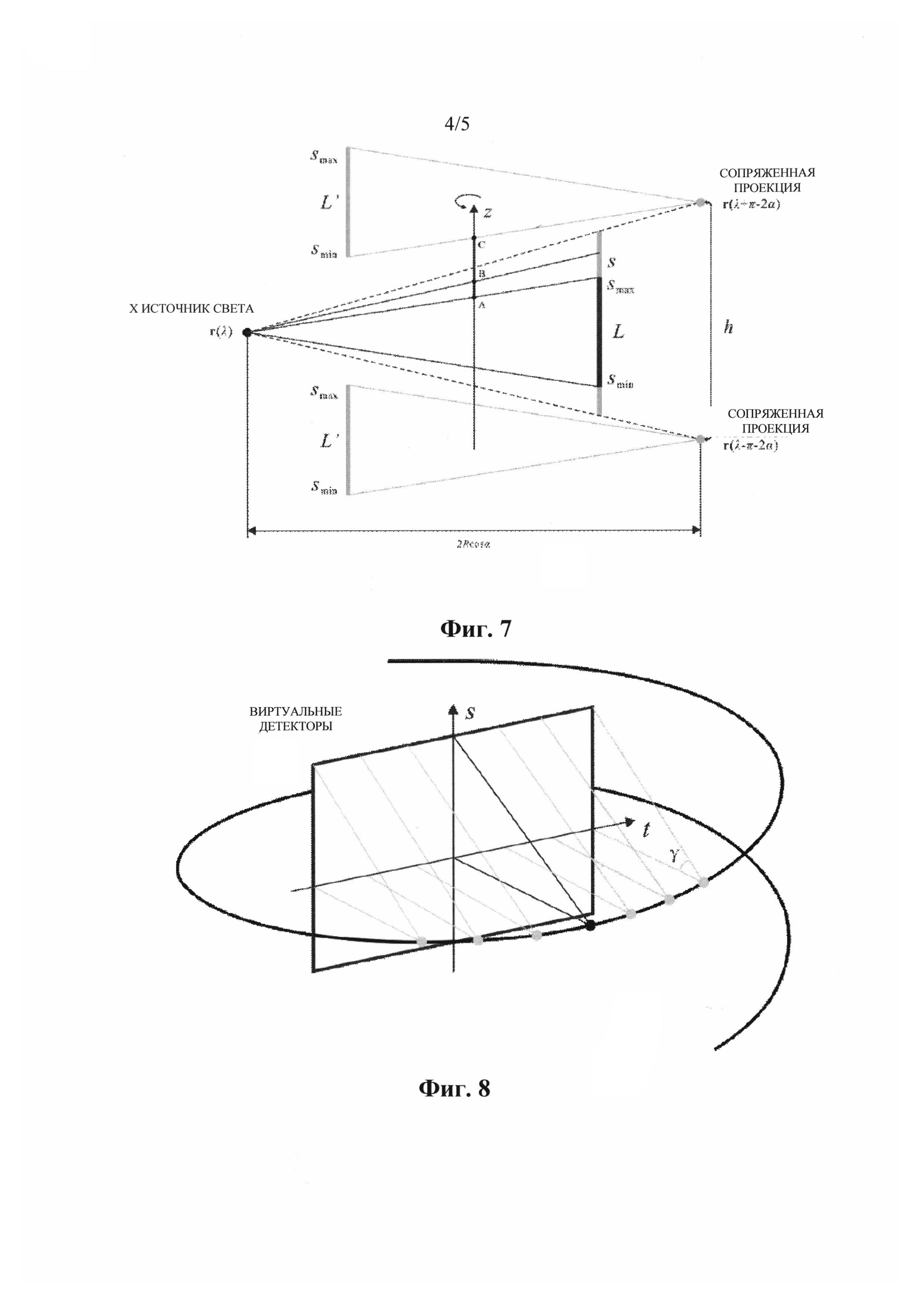
на фиг. 7 показана схема интерполяции сопряженных проекций при сканировании по спиральной траектории в соответствии с одним вариантом осуществления изобретения;
на фиг. 8 показана схема пересортированных параллельных пучков с углом конуса и виртуальными детекторами;
на фиг. 9 показаны результаты реконструкции, где шаг равен 3,9 см в соответствии с характерным вариантом осуществления изобретения; и
на фиг. 10 показаны результаты реконструкции, где шаг равен 6 см в соответствии с характерным вариантом осуществления изобретения.
Осуществление изобретения
Более подробно характерные варианты осуществления изобретения будут описаны ниже. Необходимо отметить, что варианты осуществления в настоящем документе приведены исключительно в иллюстративных целях без ограничения настоящего раскрытия. В приведенном ниже описании описаны некоторые характерные детали, позволяющие понять изобретение более подробно. Однако специалисту в области техники, к которой относится изобретение, должно быть понятно, что изобретение может быть реализовано и без этих характерных деталей. В других случаях хорошо известные схемы, материалы или способы специально не описываются, чтобы не усложнять понимание изобретения.
Под используемыми во всем описании выражениями «один вариант осуществления», «вариант осуществления», «один пример» или «пример» подразумевается, что различные характерные признаки, структуры или свойства, описываемые в связи с вариантом осуществления или примером, включены по меньшей мере в один вариант осуществления изобретения. Поэтому выражения «в соответствии с одним вариантом осуществления», «в соответствии с вариантом осуществления», «в соответствии с одним примером» или «в соответствии с примером», которые встречаются в различных местах в описании, необязательно относятся к тому же варианту осуществления или примеру. Более того, характерные признаки, структуры или свойства могут быть объединены в одном или нескольких вариантах осуществления или примерах в любую соответствующую комбинацию и/или подкомбинацию. Более того, специалисту в области техники, к которой относится изобретение, понятно, что в настоящем документе термин «и/или» подразумевает все без исключения комбинации одного или нескольких перечисленных элементов.
Ввиду того что требования к реконструкции при условии большого шага в предшествующем уровне не выполняются, в частности когда коэффициент изменения шага превышает значение 1,5, в соответствии с вариантами осуществления изобретения предлагается компенсация утерянных в результате большого шага данных за счет взвешивания дополнительных проекционных данных для проекционных данных, полученных с помощью системы спиральной КТ. После того как данные были дополнены, данные конического пучка пересортируются в данные параллельных конусных пучков, взвешивание косинуса угла конуса и одномерную фильтрацию осуществляют по пересортированным данным параллельных конусов и наконец выполняют обратное проецирование параллельных пучков по отфильтрованным данным для получения восстановленных изображений. Согласно некоторым вариантам осуществления с помощью указанного выше способа скорость движения ленты можно увеличить в несколько раз, если существующая область с детекторами и существующая скорость контактного кольца остаются неизменными, тем самым повышая пропускную способность для багажа и сохраняя качество восстановленных изображений неизменными.
На фиг. 1 показана схема сканирования по спиральной траектории в системе КТ в соответствии с одним вариантом осуществления изобретения. Как показано на фиг. 1, радиус вращения источника 110 рентгеновского излучения обозначен как R, расстояние, на которое лента перемещается при вращении контактного кольца по кругу (называемое шагом), обозначено как h, угол обзора веерного пучка цилиндрических равноугольных детекторов 120 обозначен как 2αm, а расстояние от источника 110 рентгеновского излучения до детекторов 120 обозначено как D. Количество рядов детекторов 120 представляет собой Nrow, а межрядный интервал представляет собой srow. Коэффициент изменения шага определяется следующим образом:

Круговое вращение контактного кольца и прямолинейное перемещение ленты образуют спиральную траекторию 131 за счет относительного движения. В системе координат сканируемого объекта траекторию движения источника рентгеновского излучения можно выразить следующим образом:

В случае спиральной траектории сканирования проекционные данные, требуемые для точной реконструкции, представляют собой проекционные данные, покрываемые проекцией двух сегментов спиральной линии, которые расположены максимально близко друг к другу на детекторах, т.е. окно 121 Тама-Дэниельсона (далее упрощенно окно Тама), как показано на фиг. 1. Таким образом, минимальное количество рядов детекторов, необходимое для покрытия окна Тама, если такие параметры, как межрядный интервал srow и шаг h или подобные, определены, можно рассчитать следующим образом:
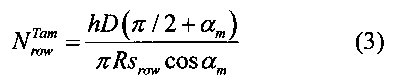
Согласно уравнению (3) максимальный шаг и максимальный коэффициент изменения шага, допускаемые в системе КТ, в которой количество рядов детекторов, межрядный интервал и угол веерного пучка являются фиксированными, можно получить обратным вычислением:

Например, если угол веерного пучка составляет 2δm=π/3, максимальный коэффициент изменения шага равен 1,3.
На фиг. 2 показано определение пары сопряженных лучей при сканировании веерным пучком в соответствии с одним вариантом осуществления изобретения. Как показано на фиг. 2, радиус вращения источника 210 рентгеновского излучения обозначен как R, расстояние, на которое перемещается лента при вращении контактного кольца по кругу (называемое шагом), обозначено как h, угол обзора веерного пучка цилиндрических равноугольных детекторов 220 обозначен как 2αm, а расстояние от источника 210 рентгеновского излучения до детекторов 220 обозначено как D. В случае двухмерного сканирования веерным пучком два луча, расположенные на одной прямой линии, называются парой сопряженных лучей L-L′, т.е. луч от источника 210 излучения к точке 210′ и луч от точки 210′ к точке 210, если источник излучения расположен в точке 210′, как показано на фиг. 2. В случае спирального сканирования в геометрии конусного пучка соответствующая пара сопряженных лучей отсутствует; однако дополнительные проекции с аналогичным взаимоотношением можно определить следующим образом:

Таким образом, во время обратного проецирования алгоритм спиральной реконструкции может порождать избыточное взвешивание или компенсировать утерянные данные за счет использования дополнительных проекционных данных.
На фиг. 3 показана принципиальная схема компьютерного томографа в соответствии с одним вариантом осуществления изобретения. Как показано на фиг. 3, компьютерный томограф в соответствии с вариантом осуществления изобретения содержит гентри 20, несущий элемент 40, контроллер 50, вычислительный процессор 60 или подобное. Гентри 20 содержит источник 10 излучения, испускающий рентгеновское излучение для проведения досмотра, например рентгеновский аппарат, и устройство 30 обнаружения и сбора данных. На несущем элементе 40 располагают досматриваемый багаж 70 для пропускания через сканируемую область между источником 10 излучения и устройством 30 обнаружения и сбора данных, расположенных на гентри 20, при этом гентри 20 вращается относительно направления движения досматриваемого багажа 70 вперед. Таким образом, излучение в форме конусного пучка, испускаемое источником 10 излучения, может проходить через досматриваемый багаж 70 для выполнения сканирования посредством КТ досматриваемого багажа 70.
Устройство 30 обнаружения и сбора данных представляет собой, например, детекторы и устройства для сбора данных в виде интегрированной модульной конструкции, например в виде множества рядов детекторов, для обнаружения лучей, проходящих через досматриваемые материалы, для получения аналогового сигнала и преобразования аналогового сигнала в цифровой сигнал для выдачи проекционных данных касательно досматриваемого багажа 70 относительно рентгеновского излучения. Контроллер 50 предназначен для управления различными частями целой системы с обеспечением их синхронной работы. Вычислительный процессор 60 предназначен для обработки данных, собранных устройством для сбора данных, обработки и реконструкции данных и выдачи результата.
Как показано на фиг. 3, источник 10 излучения может быть расположен с одной стороны досматриваемого объекта, а устройство 30 обнаружения и сбора данных расположено с другой стороны досматриваемого багажа 70, включая детекторы и устройства для сбора данных, для получения передаваемых данных и/или проекционных данных досматриваемого багажа 70, полученных под различными углами. Устройство для сбора данных содержит схему усиления и формирования данных, которая может работать в режиме интегрирования (тока) или в импульсном (счетном) режиме. Кабель вывода данных устройства 30 обнаружения и сбора данных соединен с контроллером 50 и вычислительным процессором 60 для сохранения собранных данных в вычислительном процессоре 60 согласно команде на включение.
На фиг. 4 показана принципиальная блок-схема вычислительного процессора 60, показанного на фиг. 3. Как показано на фиг. 4, данные, собранные устройством для сбора данных, сохраняются в запоминающем устройстве 61 посредством интерфейсного модуля 68 и шины 64. Постоянное запоминающее устройство (ROM) 62 содержит информацию о конфигурации и программы вычислительного процессора, хранящиеся в нем. Оперативное запоминающее устройство (RAM) 63 предназначено для временного хранения различных данных в ходе работы процессора 66. Более того, запоминающее устройство 61 также содержит компьютерные программы для обработки хранящихся в нем данных. Внутренняя шина 64 предназначена для соединения запоминающего устройства 61, ROM 62, RAM 63, устройства 65 ввода, процессора 66, устройства 67 отображения и интерфейсного модуля 68, как было описано выше.
После ввода пользователем рабочей команды посредством устройства 65 ввода, например клавиатуры, мыши или подобного, командные коды компьютерной программы подают на процессор 66 команду на выполнение заданного алгоритма реконструкции данных, а после получения результатов обработки данных команду на отображение результата на устройстве 67 отображения, таком как жидкокристаллический (ЖК) дисплей или подобное, или команду непосредственного вывода результата обработки в виде бумажного носителя, такого как печатная копия.
На фиг. 5 показана принципиальная блок-схема контроллера в соответствии с одним вариантом осуществления изобретения. Как показано на фиг. 5, контроллер 50 содержит блок 51 контроллера, предназначенный для управления источником 10 излучения, несущим элементом 40 и устройством 30 обнаружения и сбора данных в соответствии с командой, поступившей от компьютера 60; блок 52 создания сигнала на включение, предназначенный для создания команды на включение для активации работы источника 10 излучения, устройства 30 обнаружения и сбора данных и несущего элемента 40 под управлением блока управления; первое приводное устройство 53, предназначенное для приведения в действие несущего элемента 40 для перемещения досматриваемого багажа 70 в соответствии с командой на включение, созданной блоком 52 создания сигнала на включение под управлением блока 51 управления; и второе приводное устройство 54, предназначенное для приведения во вращение гентри 20 в соответствии с командой на включение, созданной блоком 52 создания сигнала на включение под управлением блока 51 управления. Проекционные данные, полученные устройством 30 обнаружения и сбора данных, сохраняются в компьютере 60 для реконструкции томографических изображений КТ с целью получения данных томографических изображений досматриваемого багажа 70. В соответствии с другими вариантами осуществления описанная выше система получения с использованием КТ также может представлять собой двухэнергетическую систему КТ, то есть источник 10 рентгеновского излучения на гентри 20 может испускать два луча, т.е. высокоэнергетический луч и низкоэнергетический луч, а после обнаружения устройством 30 обнаружения и сбора данных проекционных данных на разных энергетических уровнях вычислительный процессор 60 осуществляет двухэнергетическую реконструкцию с использованием КТ для получения данных с эквивалентными зарядовыми числами и эквивалентной плотностью электронов для различных томографических изображений досматриваемого багажа 70.
На фиг. 6 показана схема способа реконструкции в соответствии с одним вариантом осуществления изобретения. Как показано на фиг. 6, на стадии S61 в соответствии с шагом системы спиральной КТ в геометрии конусного пучка и межрядным интервалом множества рядов детекторов вычисляют минимальное количество рядов детекторов, необходимое для покрытия окна Тама. Например, минимальное количество рядов детекторов

На стадии S62, если количество рядов детекторов системы спиральной КТ в геометрии конусного пучка меньше минимального количества рядов детекторов, утерянные проекционные данные компенсируют посредством взвешивания дополнительных проекционных данных. Например, если фактическое количество рядов детекторов меньше

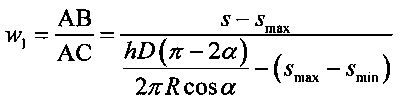
1) если s>smax,

2) аналогично, если s
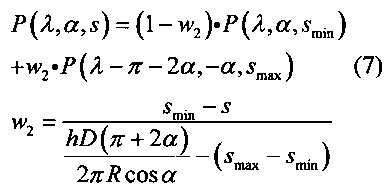
где s - координата в направлении ряда (угол конуса) детекторов, α - координата в направлении столбца (угол веерного пучка) детекторов, λ - проекционный угол, smin - минимальное значение координаты в направлении ряда (угол конуса) детекторов, smax - максимальное значение координаты в направлении ряда (угол конуса) детекторов, R - радиус вращения источника рентгеновского излучения, h - расстояние, на которое перемещается лента во время вращения контактного кольца по кругу, т.е. шаг, и D - расстояние от источника рентгеновского излучения до цилиндрических детекторов.
На стадии S63 дополненные данные конусного пучка P(λ,α,s) пересортируют в данные параллельных конусных пучков, например данные параллельных пучков с углом конуса Pp(λ,t,s). Пересортированные виртуальные детекторы образуются в прямоугольной области в центре вращения и параллельно оси z, ширина которой равна диаметру 2Rsinαm поля, покрываемого углом веерного пучка реальных цилиндрических детекторов, как показано на фиг. 8.
На стадии S64 сначала выполняют взвешивание косинуса угла конуса по пересортированным данным, а затем выполняют одномерную фильтрацию по данным, причем направление фильтрации проходит вдоль направления ряда виртуальных детекторов. Если процесс фильтрации проходит в одномерной инвариантной относительно сдвига форме, фильтрация может быть выполнена с помощью быстрого преобразования Фурье. При выполнении алгоритма фильтрации и обратного проецирования параллельных пучков в качестве ядра фильтрации выбирают ядро свертки R-L (алгоритм Ричардсона-Люси):

На стадии S65 для получения восстановленных изображений выполняют обратное проецирование в геометрии параллельных конусных пучков без взвешивания:

Согласно способу в соответствии с вариантом осуществления изобретения скорость движения ленты можно увеличить в несколько раз, если существующая область с детекторами и существующая скорость контактного кольца остаются неизменными, тем самым повышая пропускную способность для багажа и сохраняя качество восстановленных изображений неизменными. С другой стороны, способ в соответствии с изобретением позволяет изменить конструкцию существующей системы КТ для конкретного варианта применения для соответствующего уменьшения количества рядов детекторов, тем самым снижая стоимость системы.
Например, источник рентгеновского излучения имеет радиус вращения, равный 50 см, расстояние от источника до детекторов составляет 80 см, угол веерного пучка детекторов составляет 60°, количество рядов детекторов равно 32, а межрядный интервал равен 1,5 мм. Если необходимо выполнить требования для сбора всех проекционных данных, максимальный коэффициент изменения шага равен 1,3, а соответствующий максимальный шаг равен 3,9 см. Благодаря способу в соответствии с изобретением максимальный шаг можно увеличить до 6 см, а коэффициент изменения шага равен 2.
На фиг. 9 показаны результаты реконструкции, где шаг равен 3,9 см в соответствии с характерным вариантом осуществления изобретения. На фиг. 10 показаны результаты реконструкции, где шаг равен 6 см в соответствии с характерным вариантом осуществления изобретения. На чертежах видно, что при увеличении скорости сканирования качество восстановленных изображений сохраняется.
В соответствии с некоторыми вариантами осуществления скорость ленты можно дополнительно увеличить в условиях существующего оборудования, такого как детекторы, контактное кольцо или подобное, для повышения пропускной способности, что может быть применимо, например, в области досмотра при поиске взрывчатых веществ, наркотиков и т.п. Более того, предлагаемый способ компенсации утерянных данных с помощью дополнительной проекции применим в случае, если проекционные данные являются неполными, также обеспечивая качество восстановленных изображений, даже если коэффициент изменения шага превышает 1,5. В то же время алгоритм реконструкции, предлагаемый в соответствии с вариантом осуществления, имеет инвариантную относительно сдвига форму, в нем используется обратное проецирование параллельных пучков без коэффициента взвешивания по расстоянию, минимальный угловой диапазон обратного проецирования составляет 180 градусов, при этом нет необходимости решать группу нелинейных уравнений. Таким образом, способ является менее сложным по сравнению с уровнем техники и может обеспечивать соответствие требованиям выполнения досмотра в реальном времени.
Приведенное выше подробное описание продемонстрировало различные варианты осуществления способа реконструкции и системы спиральной КТ посредством использования схем, блок-схем и/или примеров. Если такие схемы, блок-схемы и/или примеры содержат одну или несколько функций и/или операций, специалисту в области техники, к которой относится изобретение, должно быть понятно, что каждая функция и/или операция в таких схемах, блок-схемах или примерах может быть реализована отдельно и/или совместно в широком диапазоне конструкций, оборудования, программного обеспечения, встроенных программ или практически в любом их сочетании. Согласно одному варианту осуществления несколько частей объекта, описанного в вариантах осуществления изобретения, могут быть реализованы посредством специализированных интегральных микросхем (ASIC), программируемых пользователем матриц логических элементов (FPGA), цифровых сигнальных процессоров (DSP) или других встроенных схем. Однако специалисту в области техники, к которой относится изобретение, будет понятно, что некоторые аспекты вариантов осуществления, раскрытые в настоящем документе, целиком или частично также могут быть реализованы в интегральных схемах, в виде одной или нескольких компьютерных программ, работающих на одном или нескольких компьютерах (например, в виде одной или нескольких программ, работающих на одной или нескольких компьютерных системах), в виде одной или нескольких программ, работающих на одном или нескольких процессорах (например, в виде одной или нескольких программ, работающих на одном или нескольких микропроцессорах), в виде встроенных программ или в виде практически любой их комбинации, и что проектирование схем и/или написание кода для программного обеспечения и/или встроенных программ будет в компетенции специалистов в данной области техники, к которой относится изобретение. Более того, специалистам в данной области техники будет понятно, что механизмы объекта, раскрытого в настоящем документе, могут быть представлены в виде программного продукта в различных формах, и что наглядный вариант осуществления объекта, описанного в настоящем документе, является релевантным, независимо от типа передающего сигнал средства, используемого для фактической реализации. Примеры передающего сигнал средства включают, помимо прочего, следующее: записываемый носитель, такой как гибкий диск, жесткий диск, компакт-диск (CD), универсальный цифровой диск (DVD), магнитная лента для цифровой записи, память компьютера и т.д.; и пропускное средство, такое как цифровое и/или аналоговое средство передачи данных (например, волоконно-оптический кабель, волновод, проводной канал передачи данных, беспроводной канал передачи данных и т.д.).
Хотя изобретение было описано со ссылкой на несколько характерных вариантов осуществления, специалисту в области техники, к которой относится изобретение, понятно, что термины приведены в иллюстративных и пояснительных целях без ограничения. Изобретение может быть реализовано на практике в различных формах, при этом не выходя за пределы сущности и объема изобретения. Необходимо понимать, что варианты осуществления не ограничиваются приведенными выше деталями и должны трактоваться в самом широком смысле в пределах объема изобретения, определенного приведенной ниже формулой изобретения. Поэтому все модификации и альтернативы, подпадающие под объем формулы изобретения или их эквиваленты, входят в объем правовой охраны, определяемый прилагаемой формулой изобретения.
Реферат
Использование: для спиральной компьютерной томографии. Сущность изобретения заключается в том, что вычисляют минимальное количество рядов детекторов, необходимое для покрытия окна Тама в соответствии с шагом системы спиральной КТ в геометрии конусного пучка и межрядным интервалом множества рядов детекторов; компенсируют утерянные проекционные данные посредством взвешивания дополнительных проекционных данных в случае, если количество рядов детекторов системы спиральной КТ в геометрии конусного пучка меньше минимального количества рядов детекторов; пересортировывают данные конусного пучка в данные параллельных конусных пучков; выполняют взвешивание косинуса угла конуса по пересортированным данным параллельных конусов, а затем выполняют одномерную фильтрацию по данным в направлении ряда виртуальных детекторов, образованных при пересортировке проекционных данных в данные параллельных пучков; и выполняют обратное проецирование в геометрии параллельных конусных пучков без взвешивания по отфильтрованным данным для получения восстановленных изображений. Технический результат: повышение пропускной способности для багажа при сохранении качества восстановленных изображений. 2 н. и 3 з.п. ф-лы, 10 ил.
Формула
вычисления минимального количества рядов детекторов, необходимого для покрытия окна Тама в соответствии с шагом системы спиральной КТ в геометрии конусного пучка и межрядным интервалом множества рядов детекторов;
компенсации утерянных проекционных данных посредством взвешивания дополнительных проекционных данных в случае, если количество рядов детекторов системы спиральной КТ в геометрии конусного пучка меньше минимального количества рядов детекторов;
пересортировки данных конусного пучка в данные параллельных конусных пучков;
выполнения взвешивания косинуса угла конуса по пересортированным данным параллельных конусов, а затем выполнения одномерной фильтрации по данным в направлении ряда виртуальных детекторов, образованных при пересортировке проекционных данных в данные параллельных пучков; и
выполнения обратного проецирования в геометрии параллельных конусных пучков без взвешивания по отфильтрованным данным для получения восстановленных изображений.
если s>smax,

если s


где s - координата в направлении ряда (угол конуса) детекторов, α - координата в направлении столбца (угол веерного пучка) детекторов, λ - проекционный угол, smin - минимальное значение координаты в направлении ряда (угол конуса) детекторов, smax - максимальное значение координаты в направлении ряда (угол конуса) детекторов, R - радиус вращения источника рентгеновского излучения, h - расстояние, на которое перемещается лента во время вращения контактного кольца по кругу, т.е. шаг, и D - расстояние от источника рентгеновского излучения до цилиндрических детекторов.
средства для вычисления минимального количества рядов детекторов, необходимого для покрытия окна Тама в соответствии с шагом системы спиральной КТ в геометрии конусного пучка и межрядным интервалом множества рядов детекторов;
средства для компенсации утерянных проекционных данных посредством взвешивания дополнительных проекционных данных в случае, если количество рядов детекторов системы спиральной КТ в геометрии конусного пучка меньше минимального количества рядов детекторов;
средства для пересортировки дополненных проекционных данных в данные параллельных конусных пучков;
средства для выполнения взвешивания косинуса угла конуса по пересортированным данным параллельных пучков, а затем выполнения одномерной фильтрации по данным в направлении ряда виртуальных детекторов, образованного при пересортировке проекционных данных в данные параллельных пучков; и
средства для выполнения обратного проецирования в геометрии параллельных конусных пучков без взвешивания по отфильтрованным данным для получения восстановленных изображений.
если s>smax,


если s


где s - координата в направлении ряда (угол конуса) детекторов, α - координата в направлении столбца (угол веерного пучка) детекторов, λ - проекционный угол, smin - минимальное значение координаты в направлении ряда (угол конуса) детекторов, smax - максимальное значение координаты в направлении ряда (угол конуса) детекторов, R - радиус вращения источника рентгеновского излучения, h - расстояние, на которое перемещается лента во время вращения контактного кольца по кругу, т.е. шаг, и D - расстояние от источника рентгеновского излучения до цилиндрических детекторов.
Комментарии