Устройство обнаружения фокуса - RU2486551C2
Код документа: RU2486551C2
Чертежи
Описание
УРОВЕНЬ ТЕХНИКИ
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству обнаружения фокуса, а более конкретно к устройству обнаружения фокуса для объекта.
Описание предшествующего уровня техники
Традиционно делались различные предложения для технологий определения фокуса в устройстве съемки изображения, таком как фотоаппарат и видеокамера. Например, предлагается способ разностей и фаз, использующий так называемое TTL (сквозь объектив), в котором на оптическом пути в оптической системе отображения предоставляется блок разделения и положение фокуса обнаруживается, используя разделенные лучи.
В дополнение также предлагается способ внешнего измерения, использующий так называемый non-TTL, в котором положение фокуса обнаруживается, используя луч внешнего света, который отличен от луча оптической системы отображения. Дополнительно предлагается способ, в котором положение фокуса обнаруживается, используя выходной сигнал изображения от элемента съемки изображения.
В устройстве обнаружения фокуса способа разности фаз и способа внешнего измерения из числа вышеупомянутых способов фотоэлектрическим преобразователем в устройстве обнаружения фокуса выполняется фотоэлектрическое преобразование луча от объекта и полученные электрические заряды накапливаются и считываются в качестве сигналов изображения. Дополнительно, сигналы изображения, считанные с фотоэлектрического преобразователя, используются для выполнения корреляционного вычисления для определения значения смещений в изображении, а именно разности фаз. В этом случае степень совпадения между двумя изображениями используется в качестве степени корреляции для определения целевого значения до достижения точки фокусировки. Вообще такая разность фаз, при которой степень корреляции становится крайней и наибольшей, устанавливается в качестве целевого значения высокой надежности. Затем целевое значение преобразовывается в целевое местоположение фокусной линзы на основании степени расфокусирования от точки фокусировки или информации расстояния до объекта, благодаря чему выполняется управление фокусной линзой.
Попутно предлагаются различные способы для управления операцией по накоплению зарядов датчиками обнаружения фокуса в способе разницы фаз и способе внешнего измерения. Например, существует известный способ управления посредством автоматической регулировки усиления (AGC), в котором операция по накоплению прекращается, когда достигается предопределенный уровень сигнала. В качестве другого примера существует известный способ управления, в котором операция по накоплению прекращается в момент времени, когда истекает предопределенное время накопления, даже если не был достигнут предопределенный уровень сигнала. В дополнение оба вышеупомянутых типа способов управления накоплением иногда используются с тем, чтобы охватывать широкий динамический диапазон степени освещенности объекта при различных условиях захвата изображения.
В качестве датчика для обнаружения фокуса в способе разности фаз или способе внешнего измерения используется линейный датчик, образованный в одну линию, или зональный датчик, образованный из множества линейных датчиков. В некоторых зональных датчиках каждая его зона соединяется со схемой AGC, а управление накоплением выполняется так, что каждая зона может выдавать сигнал с оптимальным контрастом независимо. Таким образом, размещая множество зон на экране захвата изображения для выполнения обнаружения фокуса, является возможным выполнить обнаружение фокуса, вычисляя оптимальный контраст для зоны обнаружения фокуса.
Однако если датчик разделен на множество зон, изображение может быть образовано над множеством зон. Например, в способе разности фаз, когда генерируется большое расфокусирование, два образованных изображения не могут содержаться в одной зоне. В дополнение, в способе внешнего измерения в зависимости от расстояния до объекта два образованных изображения объекта могут быть разнесены на различные расстояния, чтобы содержаться в одной зоне так, что изображения образуются над зонами.
При установке подходящего AGC для каждой области и выполнения корреляционного вычисления после связывания частей данных между областями является возможным выполнить обнаружение фокуса с использованием множества зон. Однако множество действий по накоплению являются необходимостью, а следовательно, длительность процесса обнаружения фокуса увеличивается. В частности, при низкой степени освещенности окружения, из-за того что время накопления является протяженным, сложно справиться с процессом в реальном режиме времени при захвате подвижного изображения или в подобных обстоятельствах. Следовательно, в качестве традиционного примера предлагается способ выполнения вычисления для обнаружения фокуса, использующий два изображения над множеством зон.
Например, выложенная заявка № 2006-184320 на выдачу патента Японии предлагает следующий способ. Если обнаружение фокуса не может быть выполнено, когда корреляционное вычисление выполняется на m-й зоне, данные (m-l)-й зоны или (m+l)-й в качестве соседних зон конвертируются в произвольное время накопления и связываются с данными m-й зоны. Затем диапазон корреляционного вычисления увеличивается, пока не сможет быть выполнено обнаружение фокуса. При такой конфигурации является возможным охватывать случай, в котором изображение образуется в различных зонах, когда генерируется большое расфокусирование.
В дополнение, выложенная заявка № 2008-009279 на выдачу патента Японии предлагает способ переключения между первым режимом, в котором управление накоплением выполняется независимо для каждой зоны для независимого считывания выходного сигнала, и вторым режимом, в котором управление накоплением выполняется целиком для всех зон для считывания выходного сигнала. В конфигурации выложенной заявки № 2008-009279 на выдачу патента Японии во втором режиме множество зон связаны для выполнения управления накоплением подобно одному линейному датчику, а отдельные схемы управления последовательно возбуждаются для вывода сигналов. Следовательно, без смещения выделенного датчика при большом расфокусировании является возможным выполнить обнаружение фокуса над множеством зон.
Однако в традиционных способах, раскрытых в выложенной заявке № 2006-184320 и 2008-009279 на выдачу патента Японии, не принято во внимание отставание во времени в управлении накоплением различных зон или разница чувствительности накопления между зонами. Следовательно, в строгом смысле полученные данные являются разными между зонами. Следовательно, согласно традиционным способам связи компонентов данных между зонами получаются различные результаты между случаем, где корреляционная обработка вычисляется для того же объекта в одной зоне, и случаем, где корреляционная обработка вычисляется на границе между зонами, и, следовательно, в некоторых случаях точный результат корреляционной обработки не может быть получен.
В частности, в окружении с высокой степенью освещенности заметно затрагивается уровень разницы между различными зонами. Существует случай, когда результат корреляционного вычисления является отличным от присущего значения в зависимости от условий освещения. В результате, когда выполняется действие по автоматической фокусировке, действие фокусировки может привести к размытому состоянию.
В способе разности фаз обычно образуются два изображения в одной зоне, как только положение фокуса становится близким к положению фокусировки. Следовательно, точность корреляционного вычисления между зонами улучшается больше при положении фокуса, более близком к положению фокусировки. Следовательно, всегда возможно выполнить управление фокусом при регулировании с обратной связью. Однако в случае способа внешнего измерения, который указывает данные расстояния до объекта, постоянный результат получается независимо от положения фокусировки или положения расфокусирования. Другими словами, способ внешнего измерения является способом управления разомкнутой системы. Следовательно, в случае способа внешнего измерения влияние ошибки в результате корреляционного вычисления, в частности на границе между зонами, склонно к увеличению. В дополнение, также в случае способа разности фаз, если на границе между зонами присутствует максимум уровня степени освещенности объекта в момент времени, когда окончательно устанавливается положение фокусировки, в отличие от присущих данных накопления, точность разности фаз, которая должна быть вычислена корреляционным вычислением, уменьшается.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, задачей настоящего изобретения является предоставление устройства обнаружения фокуса, допускающего выполнение обнаружения фокуса объекта над множеством зон с высокой точностью в короткий период времени, а также предоставление устройства съемки изображения, включающего в себя устройство обнаружения фокуса.
Для того чтобы решить вышеупомянутую задачу, устройство обнаружения фокуса согласно настоящему изобретению включает в себя: блок фотоэлектрического преобразования типа накопления заряда, включающий в себя множество датчиков, причем каждый имеет множество пикселей изображения; контроллер накопления для управления накоплением заряда блока фотоэлектрического преобразования; блок измерения времени накопления для измерения времени накопления от начала накопления заряда до конца накопления заряда каждого из множества датчиков блока фотоэлектрического преобразования; блок коррекционного вычисления для выполнения коррекционного вычисления сигнала фотоэлектрического преобразования каждого из множества датчиков блока фотоэлектрического преобразования и блок вычисления для обнаружения фокуса для выполнения вычисления обнаружения фокуса при использовании сигнала фотоэлектрического преобразования, откорректированного блоком коррекционного вычисления, в котором: контроллер накопления обнаруживает сигнал завершения накопления в первом датчике из множества датчиков и затем вынуждает датчики, за исключением первого датчика, прервать накопление заряда и блок коррекционного вычисления выполняет коррекционное вычисление сигнала фотоэлектрического преобразования на основе первого времени накопления, которое является временем накопления первого датчика, и второго времени накопления, которое отличается от первого времени накопления.
Настоящее изобретение может предоставить устройство обнаружения фокуса, допускающее выполнение обнаружения фокуса объекта над множеством зон с высокой точностью в короткий промежуток времени, должным образом корректируя данные накопления целевой зоны перед связыванием данных для выполнения корреляционного вычисления.
Дополнительные признаки настоящего изобретения будут более очевидными из следующего описания примерных вариантов осуществления со ссылкой на приложенные чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - конфигурационная схема согласно первому варианту осуществления настоящего изобретения.
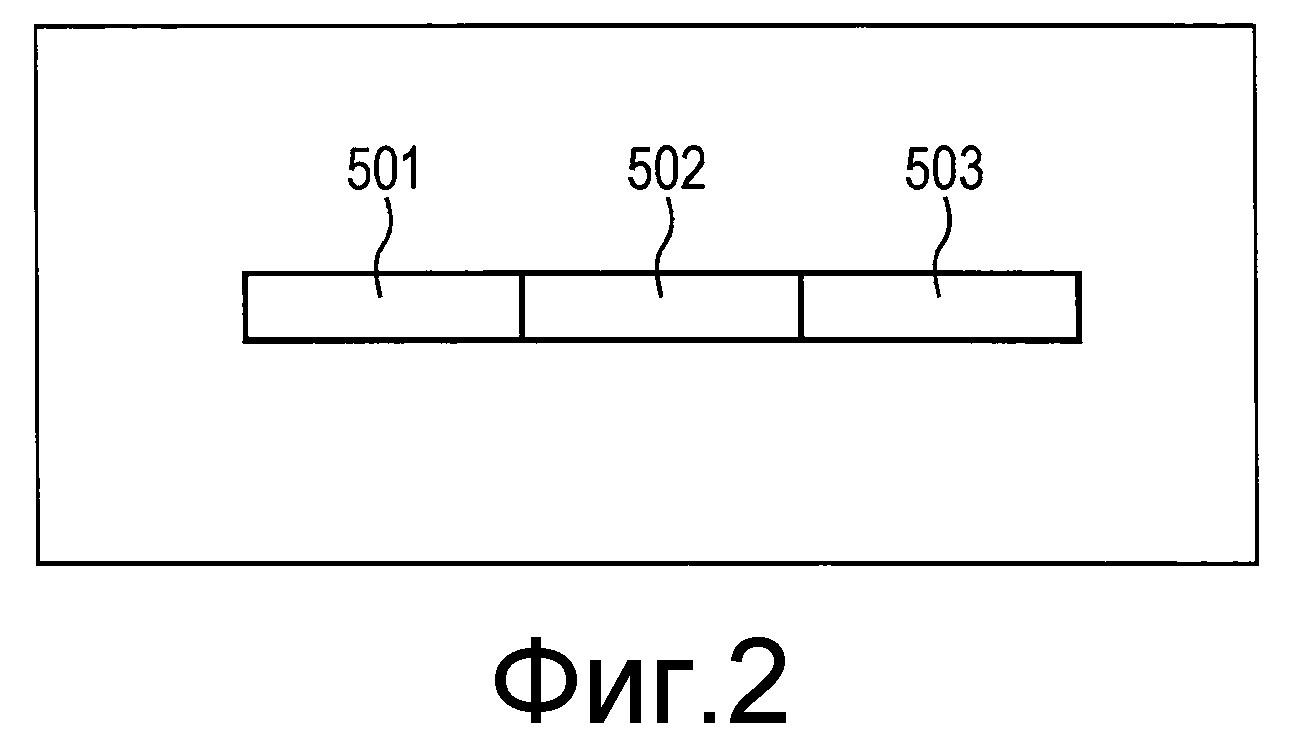
Фиг.2 - первая схема, иллюстрирующая конфигурацию датчика в первом варианте осуществления.
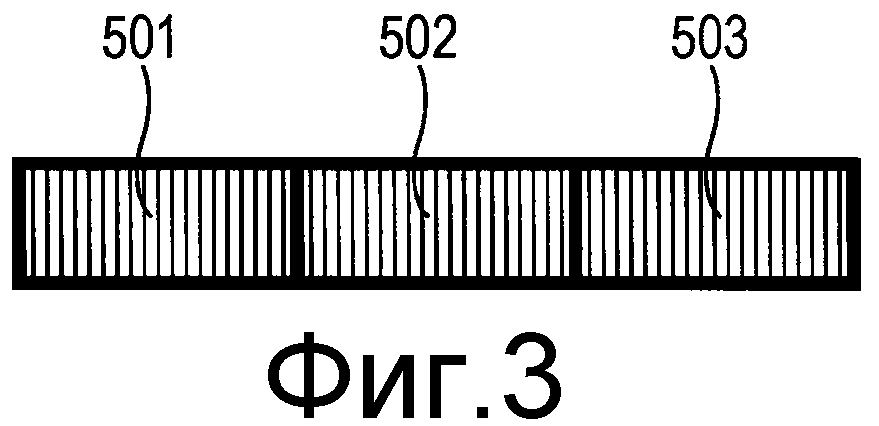
Фиг.3 - вторая схема, иллюстрирующая конфигурацию датчика в первом варианте осуществления.
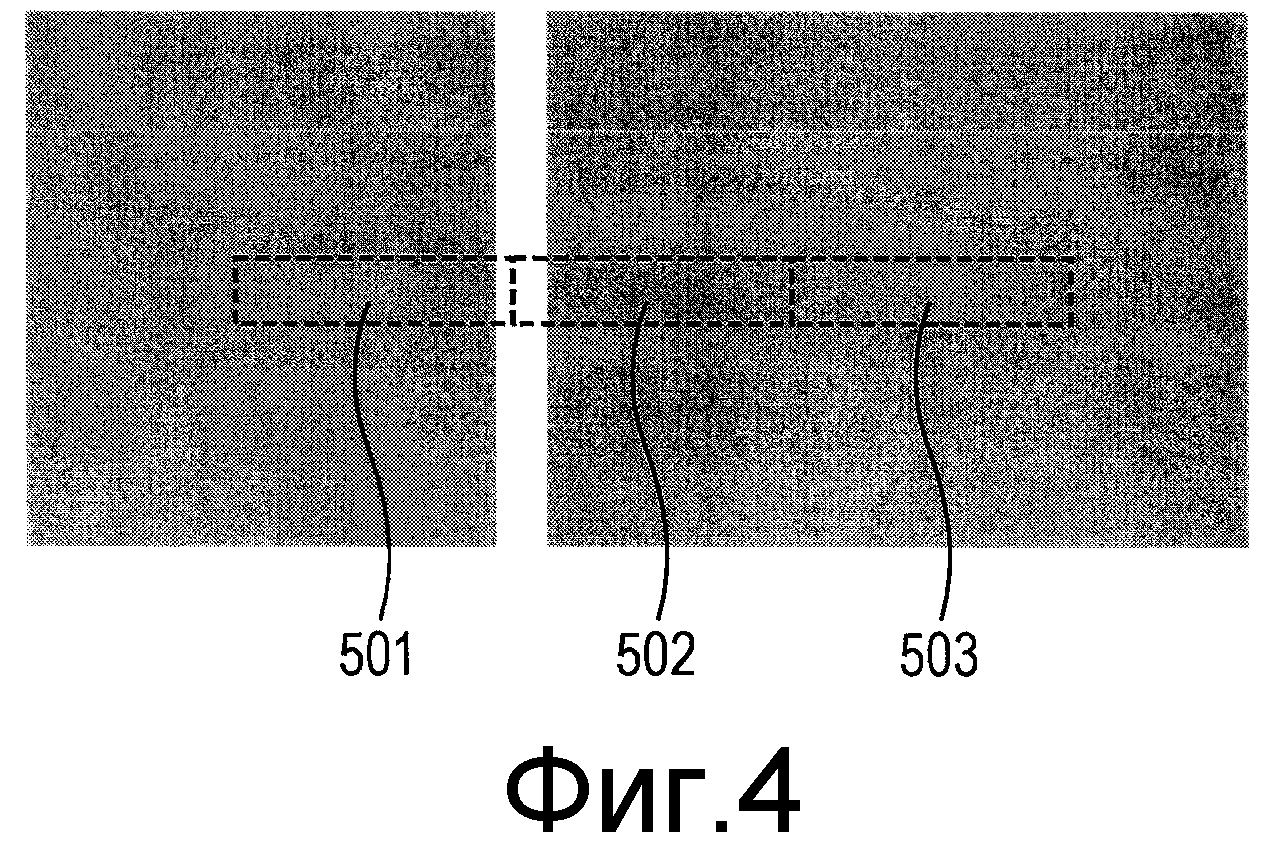
Фиг.4 - схема, иллюстрирующая пример позиционного взаимоотношения между экраном захвата изображения и датчиками в первом варианте осуществления.
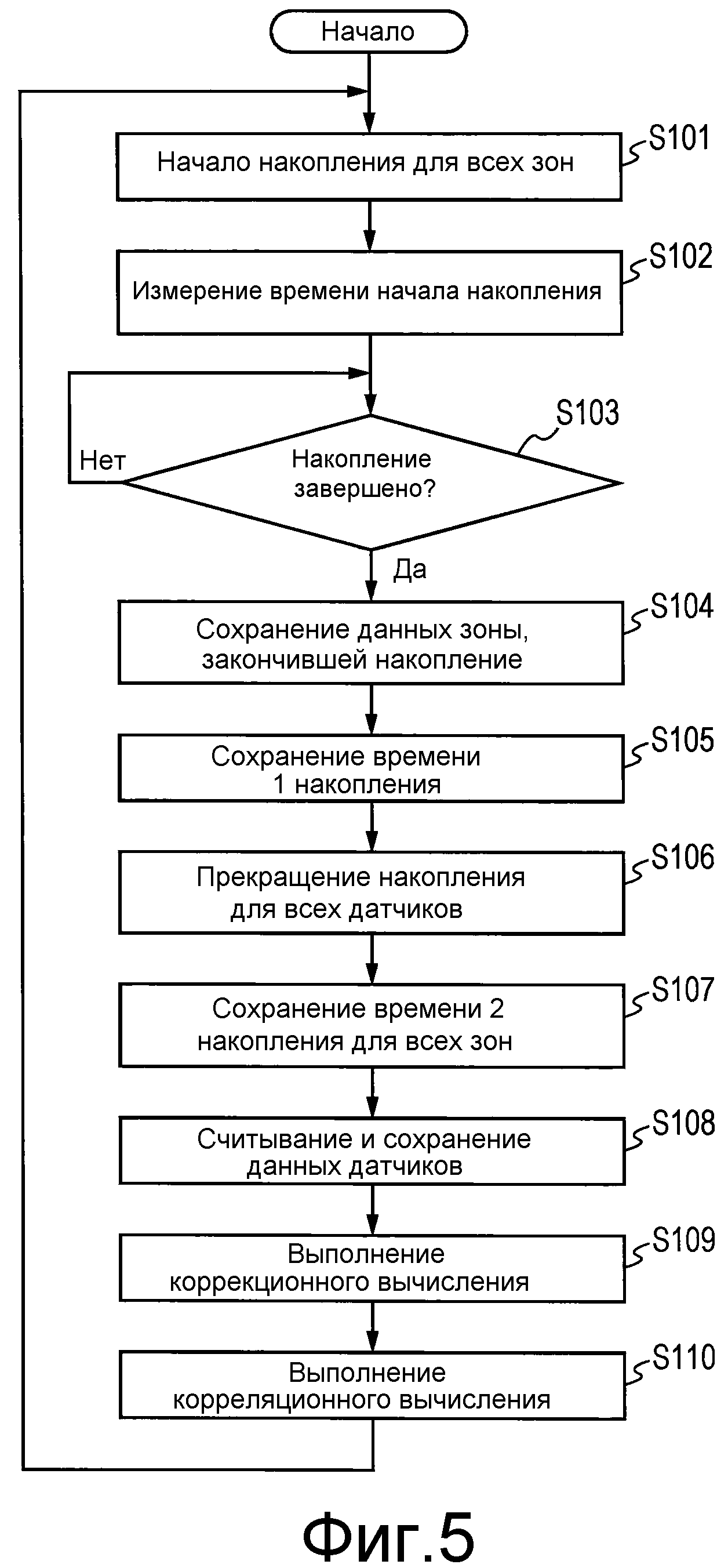
Фиг.5 - блок-схема последовательности операций в первом варианте осуществления.
Фиг.6 - схема, иллюстрирующая пример выходных данных датчика в первом варианте осуществления.
Фиг.7 - таблица, показывающая пример времени накопления датчика в первом варианте осуществления.
Фиг.8 - схема, иллюстрирующая процесс накопления датчика в первом варианте осуществления.
Фиг.9 - схема, иллюстрирующая пример позиционного взаимоотношения между экраном захвата изображения и датчиками во втором варианте осуществления настоящего изобретения.
Фиг.10 - схема, иллюстрирующая пример выходных данных датчика во втором варианте осуществления.
Фиг.11 - конфигурационная схема во втором варианте осуществления.
Фиг.12 - схема, иллюстрирующая пример позиционного взаимоотношения между экраном захвата изображения, кадром автофокусирования и датчиками во втором варианте осуществления.
Фиг.13 - блок-схема последовательности операций во втором варианте осуществления.
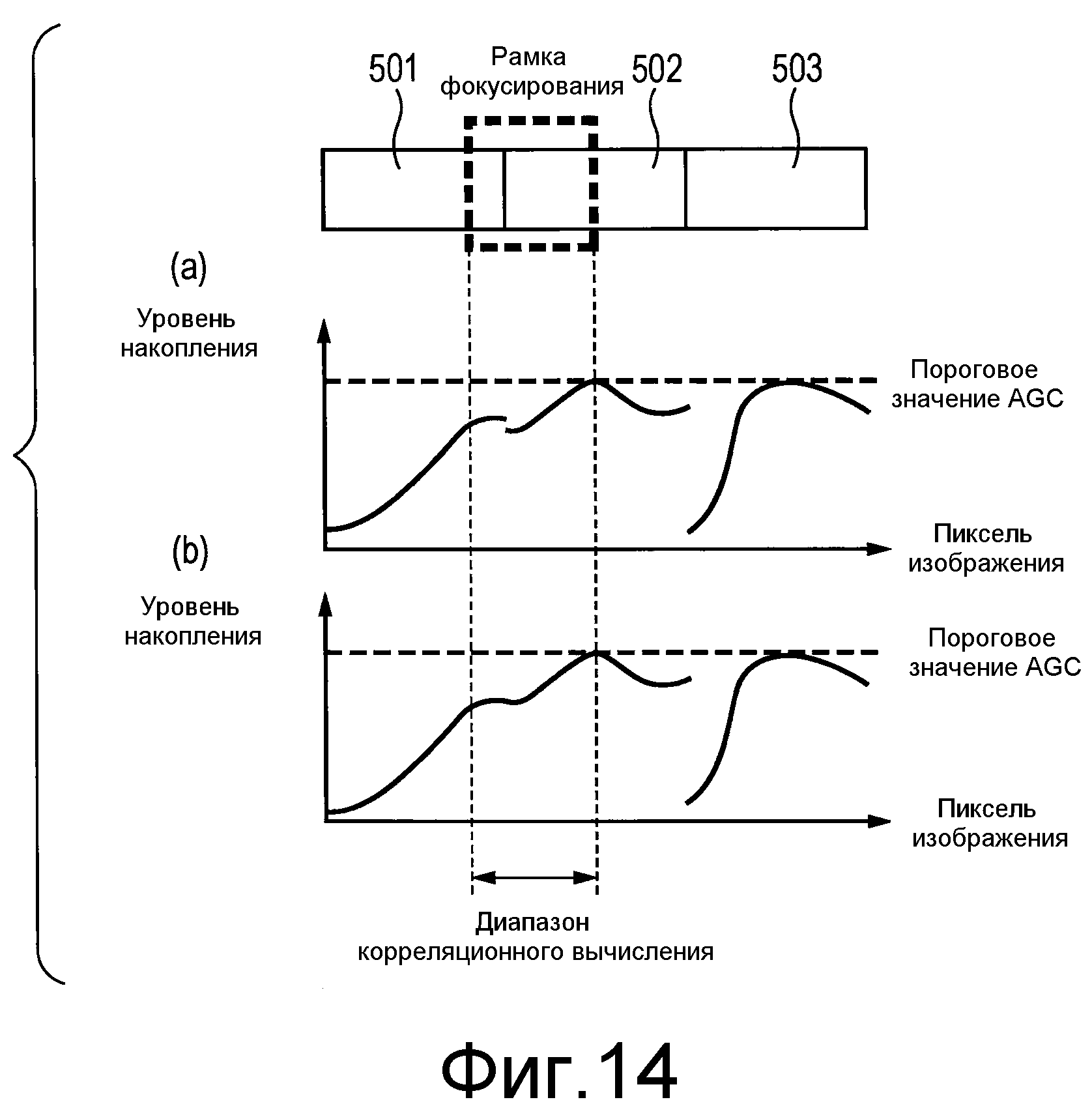
Фиг.14 - схема, иллюстрирующая пример выходных данных датчика во втором варианте осуществления.
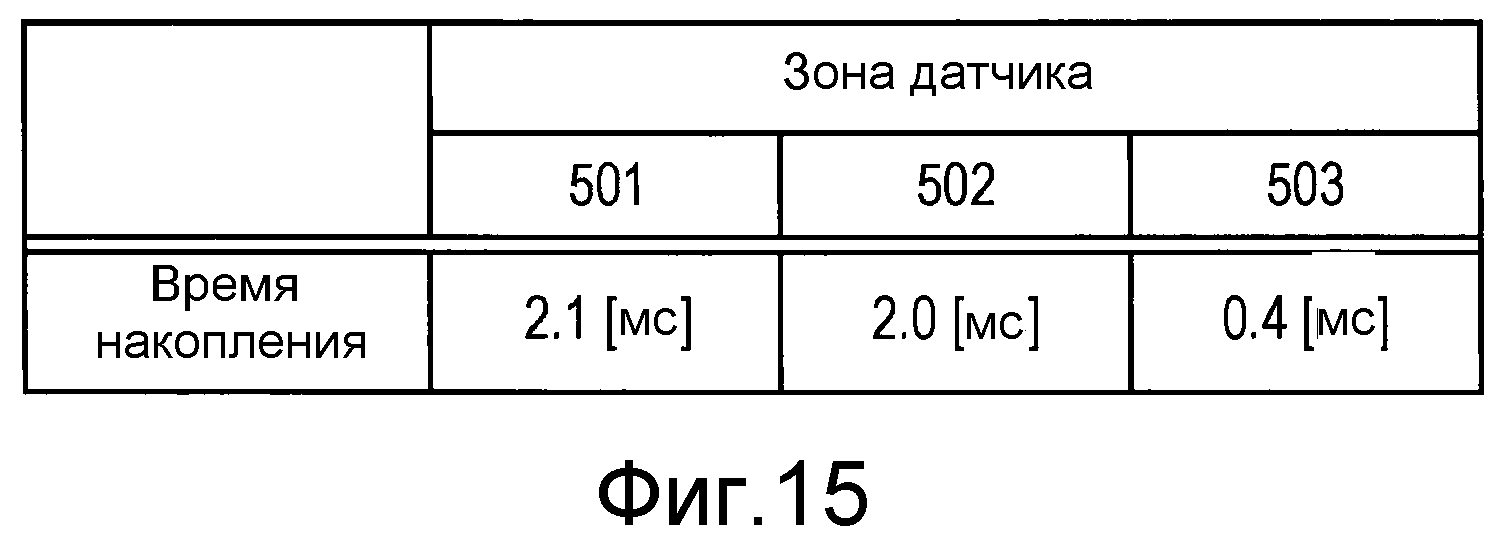
Фиг.15 - схема, иллюстрирующая пример времени накопления датчиков во втором варианте осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В дальнейшем в деталях описываются примерные варианты осуществления настоящего изобретения, ссылаясь на прилагаемые чертежи. Фиг.1 - конфигурационная схема согласно варианту осуществления настоящего изобретения.
Первый вариант осуществления
В дальнейшем, ссылаясь на фиг.1, описывается устройство 100 обнаружения фокуса согласно первому варианту осуществления настоящего изобретения.
Устройство 100 обнаружения фокуса включает в себя оптическую систему 110 отображения, которая включает в себя блок фокусной линзы.
Со стороны плоскости изображения оптической системы 110 отображения предоставлено половинное зеркало 121. Половинное зеркало в материалах настоящей заявки является любым оптическим элементом (элементом деления луча), который делит луч от объекта на два луча. Например, половинное зеркало может быть поляризационным делителем луча или может быть оптическим элементом, который делит луч на два (множество) без (почти без) отношения к поляризации. Однако является желательным, чтобы половинное зеркало (элемент деления луча) имел меньшую зависимость от длины волны. Луч от объекта, входящий в устройство 100 обнаружения фокуса, проходит через оптическую систему 110 отображения и разделяется на луч, проходящий половинное зеркало 121, и луч, отраженный половинным зеркалом 121. Луч, отраженный половинным зеркалом 121, попадает на датчик 122.
Датчик 122, который является блоком фотоэлектрического преобразования, включает в себя две пары вспомогательных линз отображения (не показаны) и две пары датчиков автофокусирования в качестве датчиков разности фаз. Датчик включает в себя множество зональных датчиков, каждый из которых является линейным датчиком, составленным из множества пикселей изображения (фотоэлектрических преобразователей). Пара изображений объекта (здесь и далее именуемых как пара изображений) образуется на каждом зональном датчике делением двух лучей каждой парой вспомогательных линз отображения после отражения половинным зеркалом 121. Фотоэлектрический преобразователь является типичным датчиком накопления заряда, и каждый зональный датчик выполняет фотоэлектрическое преобразование двух изображений и вследствие этого накапливает его заряд для генерирования двух сигналов изображения. Разность фаз, соответствующая положению фокуса устройства 100 обнаружения фокуса, может быть получена от двух сигналов изображения. Как описано выше, зональный датчик, описанный в этом варианте осуществления, является надлежащем датчиком, имеющим множество пикселей изображения (фотоэлектрическим преобразователем, имеющим множество пикселей изображения). Другими словами, зональный датчик, описанный в этом варианте осуществления, может быть линейным датчиком, в котором множество пикселей изображения расположены в одну линию, или датчик зоны может быть двумерным датчиком, в котором множество пикселей изображения размещены двумерным образом.
Когда устройство 100 обнаружения фокуса находится в положении фокусировки, разность фаз, соответствующая интервалу между двумя изображениями, указывает заданное значение. В случае так называемого положения переднего фокуса разность фаз является меньшей, чем заданное значение. В дополнение в случае так называемого положения заднего фокуса разность фаз является большей, чем заданное значение. Таким образом, датчик 122 генерирует два сигнала изображения для получения разности фаз между изображениями объекта, образованными светом, входящим в устройство 100 обнаружения фокуса.
Устройство 100 обнаружения фокуса включает в себя ЦП (CPU) 130. ЦП 130 образован из контроллера 11 накопления, счетчика 132 времени накопления, контроллера 133 считывания, блока 134 коррекционного вычисления, памяти 135 и блока 136 корреляционного вычисления.
Контроллер 131 накопления в качестве блока управления накоплением соединен с датчиком 122 для выполнения управления началом накопления заряда каждого зонального датчика из датчика 122 для обнаружения завершения накопления схемой автоматической регулировки усиления (AGC) (не показана), сохранения данных о датчике и для управления завершением накопления заряда. Когда контроллер 131 накопления начинает действие по накоплению датчика 122, счетчик 132 времени накопления в качестве блока измерения времени накопления начинает подсчитывать время накопления каждого зонального датчика. Затем, когда контроллер 131 накопления обнаруживает сигнал завершения накопления датчика 122 или прекращает действие по накоплению, подсчет завершается. Когда действия по накоплению всех зональных датчиков из датчика 122 завершены, контроллер 133 считывания данных считывает данные накопления. Считанные данные накопления преобразуются в откорректированные данные блоком 134 коррекционного вычисления и сохраняются в памяти 135. Подробности преобразования в откорректированные данные описываются позже. Затем блок 136 корреляционного вычисления в качестве блока вычисления для обнаружения фокуса использует откорректированные данные, сохраненные в памяти 135, и выполняет корреляционное вычисление для подсчета разности фаз, чтобы таким образом обнаружить положение фокуса устройства 100 обнаружения фокуса.
Здесь фиг.2 иллюстрирует пример, в котором зональные датчики обнаружения фокуса датчика 122 накладываются на экран захвата изображения. Фиг.2 иллюстрирует зональные датчики 501-503 обнаружения фокуса. Зональные датчики 501, 502 и 503 располагаются в порядке следования с левой стороны фиг.2, и каждый зональный датчик соединен со схемой автоматической регулировки усиления (AGC) (не показана). В дополнение каждый зональный датчик образован из линейного датчика, образованного из множества пикселей изображения, как проиллюстрировано на фиг.3. Фиг.4 иллюстрирует вид захваченного изображения, когда изображение объекта захватывается. Этот объект является полосой яркого света на фоне темного цвета. Как проиллюстрировано на фиг.4, полоса яркого цвета в качестве объекта помещается над зоной датчиков 501 и 502. Первый вариант осуществления описывает случай, когда положение фокуса объекта точно обнаруживается в композиции захвата изображения, проиллюстрированной на фиг.4.
Фиг.5 - блок-схема последовательности операций способа обнаружения фокуса в устройстве 100 обнаружения фокуса. ЦП 130 управляет последовательностью операций согласно компьютерной программе (не показана), сохраненной в памяти.
Когда питание подается к устройству 100 обнаружения фокуса, ЦП 130 осуществляет управление последовательностью операций с этапа S101. На этапе S101 контроллер 131 накопления инициализирует зональные датчики 501-503 датчика 122 для начала накопления.
Далее на этапе S102 счетчик 132 времени накопления начинает измерение времени накопления зональных датчиков 501-503.
Далее на этапе S103 контроллер 131 накопления ожидает завершение накопления любого одного из зональных датчиков датчика 122. Схема AGC (не показана) датчика 122 отслеживает уровни накопления заряда соответствующих зональных датчиков 501-503. Если существует, по меньшей мере, один зональный датчик (первый зональный датчик), на котором накопление заряда превышает пороговое значение AGC завершения накопления, схема AGC выдает сигнал завершения накопления контроллеру 131 накопления. Когда контроллер 131 накопления обнаруживает сигнал завершения накопления, ЦП 130 переходит к этапу S104 после этапа S103.
На этапе S104 контроллер 131 накопления сохраняет данные о зональном датчике, который завершил накопление на этапе S103, и переходит к этапу S105. На этапе S105 счетчик 132 времени накопления сохраняет время 1 накопления зонального датчика, который завершил накопление на этапе S103. Затем последовательность операций продолжается этапом S106.
На этапе S106 контроллер 131 накопления завершает накопление каждого зонального датчика за исключением зонального датчика, который завершил накопление и данные о котором были сохранены на этапе S104.
Далее на этапе S107 счетчик 132 времени накопления сохраняет время 2 накопления зональных датчиков за исключением зонального датчика, для которого время 1 накопления было сохранено на этапе S105.
Далее на этапе S108 контроллер 133 считывания данных считывает данные накопления каждого зонального датчика, принадлежащего датчику 122. Затем на этапе S109, пользуясь временем 1 накопления и временем 2 накопления, блок 134 коррекционного вычисления выполняет коррекционное вычисление данных накопления зональных датчиков за исключением зонального датчика, который завершил накопление данных и данные которого были сохранены на этапе S104. Затем откорректированные данные накопления сохраняются в памяти 135.
Далее на этапе S110 блок 136 корреляционного вычисления использует данные накопления, сохраненные в памяти 135, для соединения компонентов данных накопления зональных датчиков 501 и 502 и выполнения корреляционного вычисления, чтобы таким образом подсчитать разницу фаз. Затем последовательность операций снова возвращается к этапу S101. ЦП 130 повторно выполняет вышеупомянутую последовательность операций.
Здесь используется конкретный пример для описания содержания последовательности операций, проиллюстрированной на фиг.5.
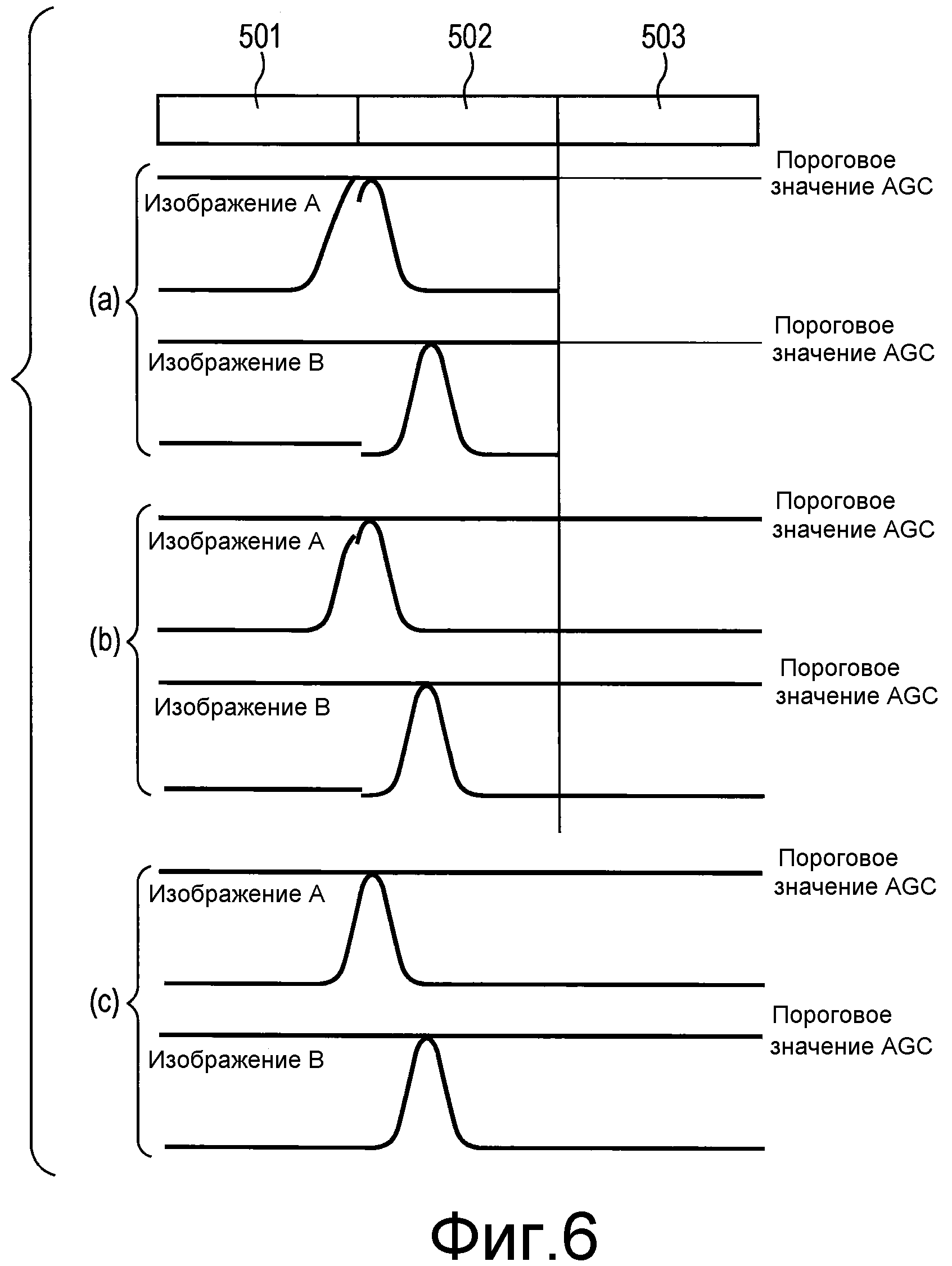
Фиг.6 иллюстрирует три формы (a)-(c) выходной кривой изображения А и изображения В двух сигналов изображения, считанных с датчика 122, в экране захвата изображения, проиллюстрированном на фиг.4. Со ссылкой на фиг.6 дается частичное описание наряду с последовательностью операций, проиллюстрированной на фиг.5.
Этапы S101, S102 и S103 являются такими, как описано выше.
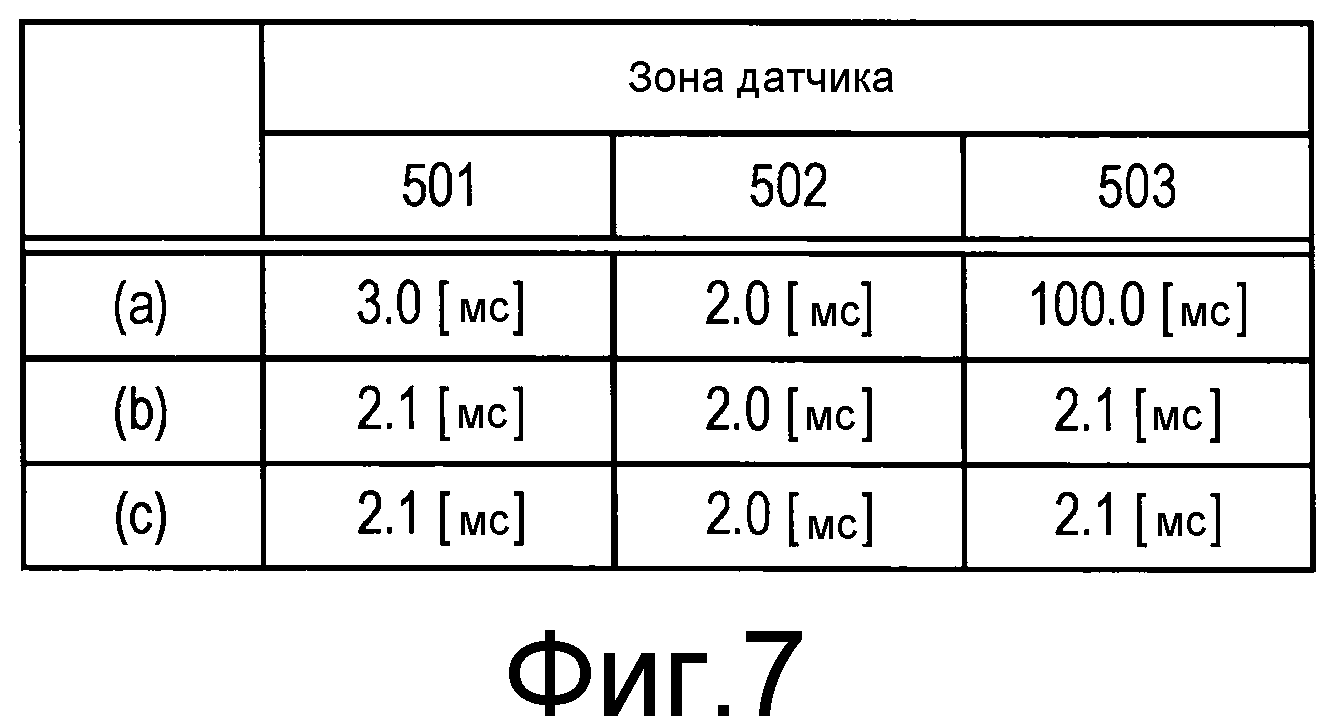
На этапе S103, например, если сигнал считывается вслед за ожиданием завершения накопления в каждом зональном датчике, накопление заряда продолжается, пока количество накопленного заряда, по меньшей мере, одного линейного датчика в каждом зональном датчике не достигнет предопределенного уровня AGC. Тем самым получают форму сигнала (а) фиг.6. В дополнение часть (а) фиг.7 иллюстрирует пример времени накопления зональных датчиков. Накопление заканчивается сначала в зональном датчике 502, имеющем максимум уровня освещенности и для изображения А и для изображения В при 2,0 миллисекундах (здесь и далее именуемых как мс). Далее в зональном датчике 501 накопление завершается при 3,0 мс. И наконец, накопление в зональном датчике 503 завершается при 100,0 мс. В этом случае форма сигнала в окрестности максимума уровня освещенности изображения А находится на зональных датчиках 501 и 502 датчика 122. Зональный датчик 501 датчика 122 выполняет накопление длительнее, чем зональный датчик 502 на 1,0 мс, которые являются разницей во времени накопления. Следовательно, когда формы сигналов стыкуются, возникает отсутствие непрерывности на границе между зональными датчиками. По этой причине, когда выполняется корреляционное вычисление, форма пика в изображении А является отличной от формы пика в изображении В. В результате является трудным получить точные результаты корреляционного вычисления.
Следовательно, когда накопление, по меньшей мере, одного зонального датчика завершается, прерывается накопление всех остальных зональных датчиков. Полученная форма сигнала в этом случае является такой, как проиллюстрировано в части (b) фиг.6. Описывается последовательность операций, пока не будет получена форма сигнала (b) фиг.6. В дополнение, описывается пример случая, когда время накопления каждого зонального датчика является таким, как проиллюстрировано в части (b) фиг.7.
На этапе S103 фиг.5 накопление заканчивается сначала в зональном датчике 502. Когда контроллер 131 накопления обнаруживает завершение накопления зонального датчика 502, последовательность операций продолжается этапом S104 после этапа S103. На этапе S104 контроллер 131 накопления запоминает зональный датчик 502 в качестве зонального датчика, который завершил накопление. Далее последовательность операций продолжается этапом S105, на котором счетчик 132 времени накопления сохраняет время накопления зонального датчика 502 в качестве первого времени накопления. В этом случае согласно части (b) фиг.7 в качестве первого времени накопления сохраняются 2,0 мс. Далее последовательность операций продолжается этапом S106, на котором контроллер 131 накопления принуждает зональные датчики 501 и 503, которые выполняют накопление, завершить накопление. Затем последовательность операций продолжается этапом S107, на котором счетчик 132 времени накопления сохраняет время накопления зональных датчиков 501, 503 в качестве второго времени накопления. В этом случае согласно части (b) фиг.7 в качестве второго времени накопления сохраняются 2,1 мс.
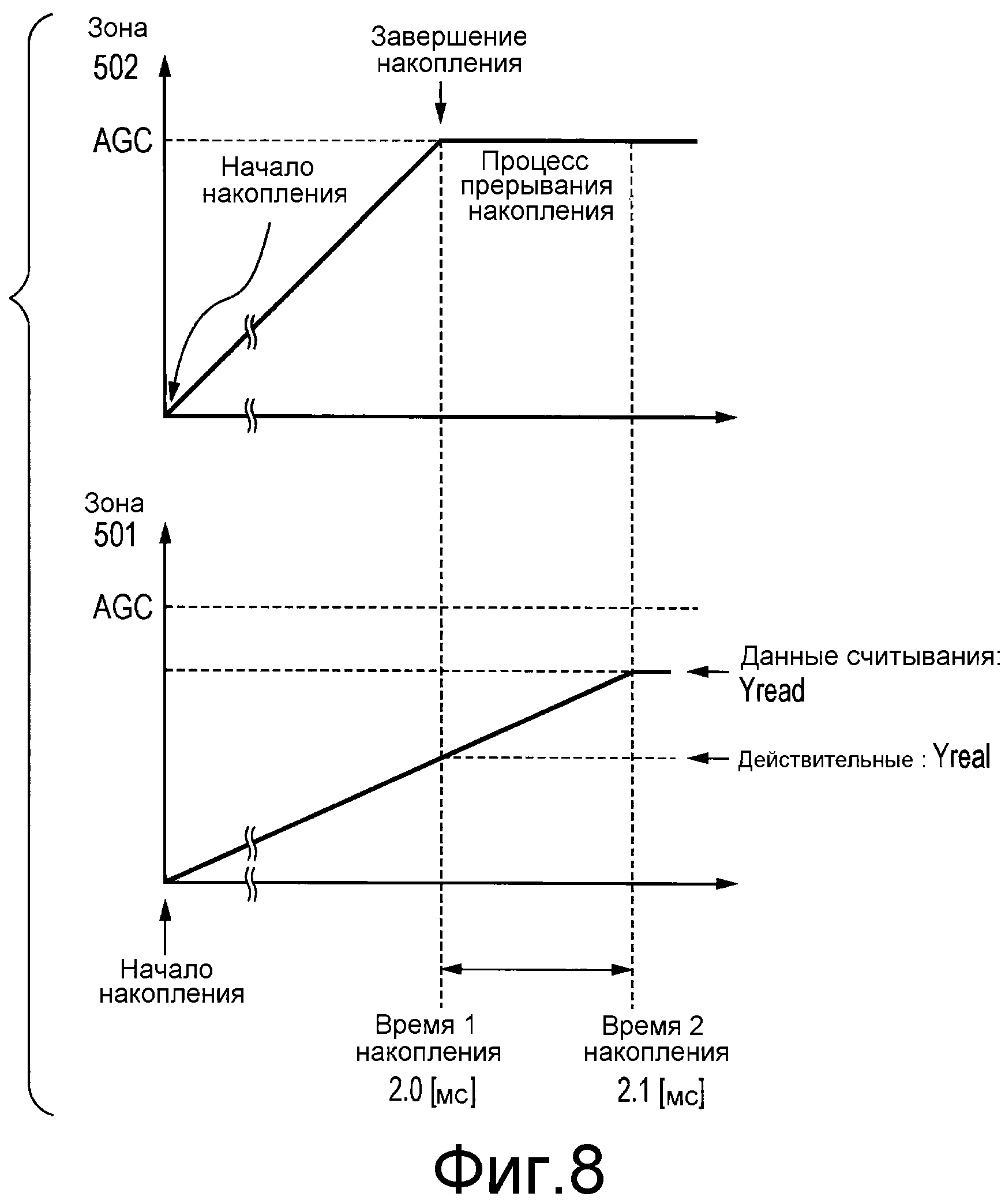
На этапе S108 данные накопления датчика считываются. В качестве формы сигнала этого случая будет получена форма сигнала, проиллюстрированная в части (b) фиг.6, как описано выше. Здесь фиг.8 иллюстрирует преобразование данных, накопленных в зональных датчиках 501 и 502. Горизонтальная ось фиг.8 представляет время накопления, измеренное счетчиком 132 времени накопления. Вертикальная ось фиг.8 представляет накопленные данные в каждом зональном датчике датчика 122. Согласно фиг.8 отставание по времени от обнаружения конца накопления зонального датчика 502 (первого зонального датчика) на этапе S103 до обработки завершения накопления зональных датчиков 501 и 503 на этапе S106 составляет 0,1 мс, что является временем разницы с зональным датчиком 502, проиллюстрированным в части (b) фиг.7. По причине этого отставания по времени сигнал фотоэлектрического преобразования избыточно накапливается в каждом из зональных датчиков 501 и 503. Как проиллюстрировано в части (b) фиг.6, изображение А имеет незначительное отсутствие непрерывности на границе между зональными датчиками 501 и 502. В принципе является желательным прервать накопление зонального датчика 501 в то же самое время, когда заканчивается накопление зонального датчика 502. Следовательно, существуют действительные данные Yreal зонального датчика, как проиллюстрировано на фиг.8.
На этапе S109 выполняется коррекционное вычисление в отношении данных накопления зональных датчиков 501 и 503, которые являются данными за исключением данных зонального датчика 502. Как проиллюстрировано на фиг.8, в отношении действительных данных Yreal достаточно откорректировать излишек величины накопления вышеупомянутого отставания по времени, которое в этом варианте осуществления составляет 0,1 мс. Величина накопления может расцениваться как пропорциональная времени накопления. Следовательно, при умножении отношения между первым временем Т1 накопления и вторым временем Т2 накопления, которое отличается от первого времени накопления на величину считывания накопления Yread каждого пикселя изображения в зональных датчиках за исключением первого зонального датчика, величина накопления Yreal при первом времени Т1 накопления может быть вычислена, как выражено в следующем уравнении (1).
Yreal=Yread×Tl/T2 (1)
Данные, которые должны быть накоплены избыточно при вышеприведенном отставании во времени, находятся под отличной продолжительностью воздействия в зависимости от количества света, попадающего на датчик. Например, когда максимальный уровень накопленных данных составляет 100 при времени накопления 2,0 мс зонального датчика 502, максимальное количество данных, накопленных при отставании во времени в 0,1 мс, составляет 5, что формирует значение ошибки величиной 5% при максимуме.
Количество света, попадающего на датчик в единицу времени, различно в зависимости от степени освещенности. Следовательно, даже для одинакового отставания во времени в 0,1 мс величина ошибки между зональными датчиками становится большей при повышении степени освещенности.
Следовательно, если объект с высокой степенью освещенности находится в окрестности границы между зональными датчиками в окружении захвата изображения с высокой степенью освещенности, увеличивается количество данных, которые должны быть накоплены. Следовательно, существует высокая вероятность того, что возникнет отсутствие непрерывности, когда зональные датчики будут связаны.
Дополнительно описывается последовательность операций фиг.5. На этапе S109, когда применяется уравнение (1) к зональным датчикам 501 и 503 блоком 14 коррекционного вычисления, получаются откорректированные данные накопления, проиллюстрированные в части (с) фиг.6. Данные, проиллюстрированные в части (с) фиг.6, могут обеспечить неразрывность данных накопления на границе между датчиками, когда данные накопления зональных датчиков соединяются. Затем последовательность операций продолжается этапом S110, на котором части данных накопления зональных датчиков 501-503 соединяются для выполнения корреляционного вычисления. Таким образом, изначально требуемые данные накопления могут быть получены отсечением данных, накопленных при отставании во времени после обнаружения конца накопления конкретного зонального датчика до конца накопления другого зонального датчика. Как результат может быть улучшена точность результата корреляционного вычисления.
Второй вариант осуществления
Первый вариант осуществления являлся примером случая, в котором все зональные датчики 501-503 используются для вычисления корреляционного вычисления. Второй вариант осуществления приводит пример конфигурации, которая может постоянно выполнять корреляционное вычисление также в оборудовании захвата изображения, проиллюстрированном на фиг.9.
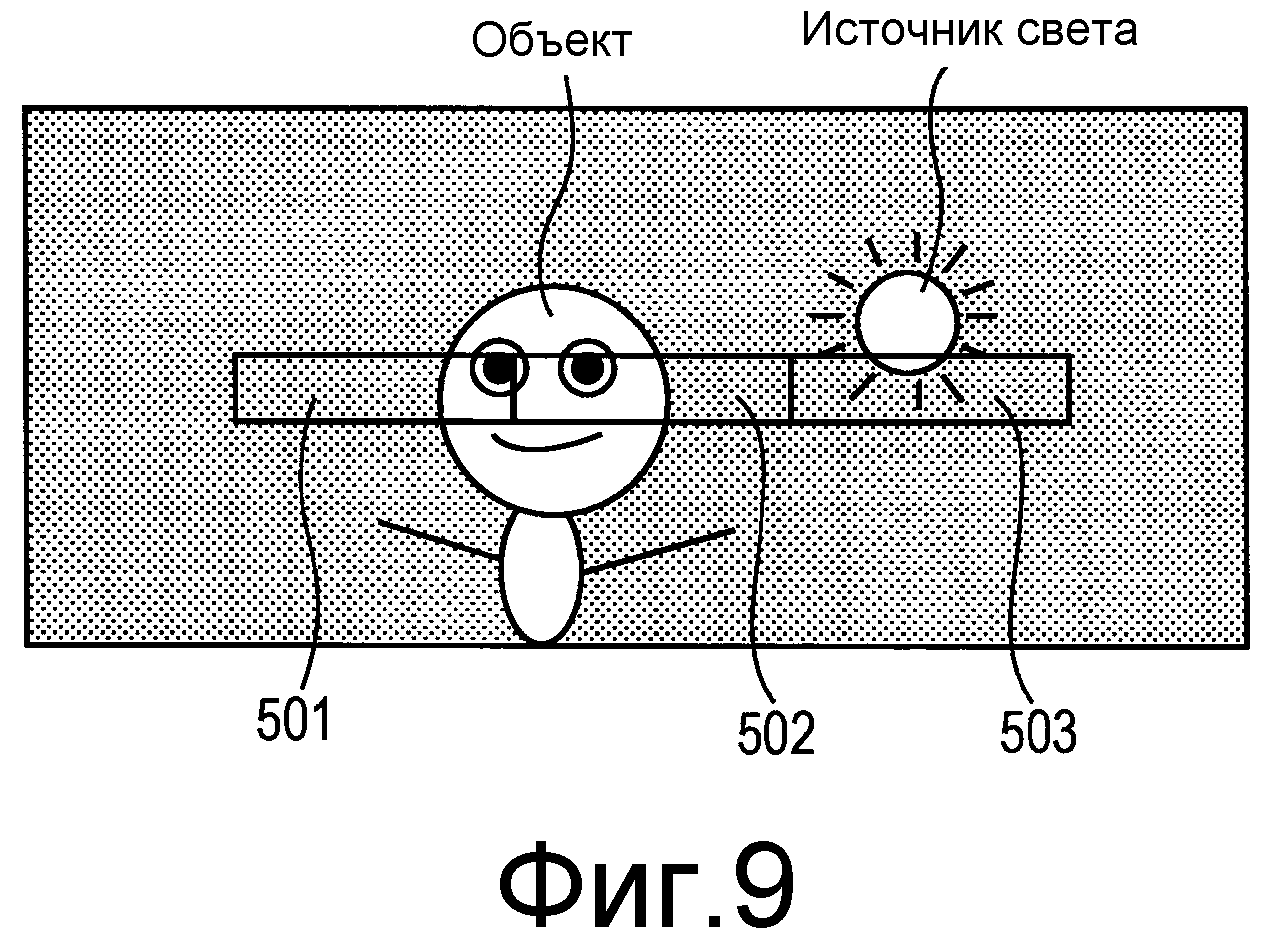
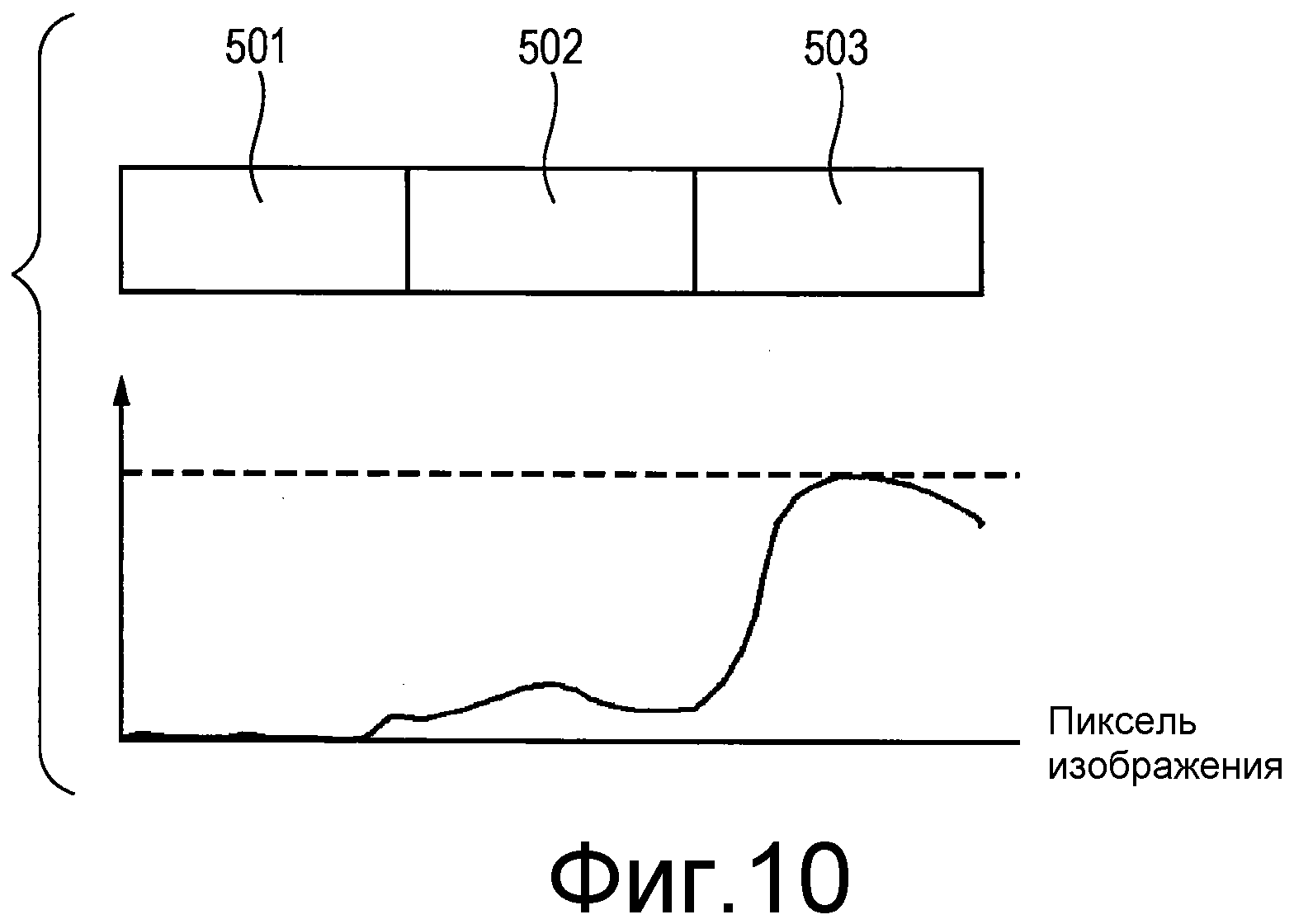
Пример захвата изображения, проиллюстрированный на фиг.9, является окружением захвата изображения, в котором существует объект и источник света высокой яркости сзади него. В этом случае источник света имеет большую яркость, чем объект, и, следовательно, среди зональных датчиков 501-503 накопление завершается сначала в зональном датчике 503. Когда применяется первый вариант осуществления, данные накопления датчика, проиллюстрированного на фиг.10, считываются контроллером 133 считывания на этапе S105 фиг.5. Заметим, что для удобства фиг.10 иллюстрируется только изображение А без иллюстрирования изображения А и изображения В, как на фиг.6. В случае формы сигнала, как проиллюстрировано на фиг.10, не может быть получен контраст данных накопления зональных датчиков 501-502, соответствующих объекту, который должен быть целью. Следовательно, может быть уменьшена точность корреляционного вычисления. Следовательно, желательно считывать данные после выполнения этапа накопления, пока не будет получен подходящий контраст в зональном датчике, в котором присутствует целевой объект.
Следовательно, в этом варианте осуществления описывается пример применения устройства обнаружения фокуса, которое может выполнять устойчивое обнаружение фокуса также при таком условии захвата изображения. Более точно, избирательный переключатель для выбора объекта размещается так, что выбирается целевой зональный датчик, а при ожидании завершения накопления целевого зонального датчика является возможным извлечь данные накопления, соответствующие объекту с подходящим контрастом.
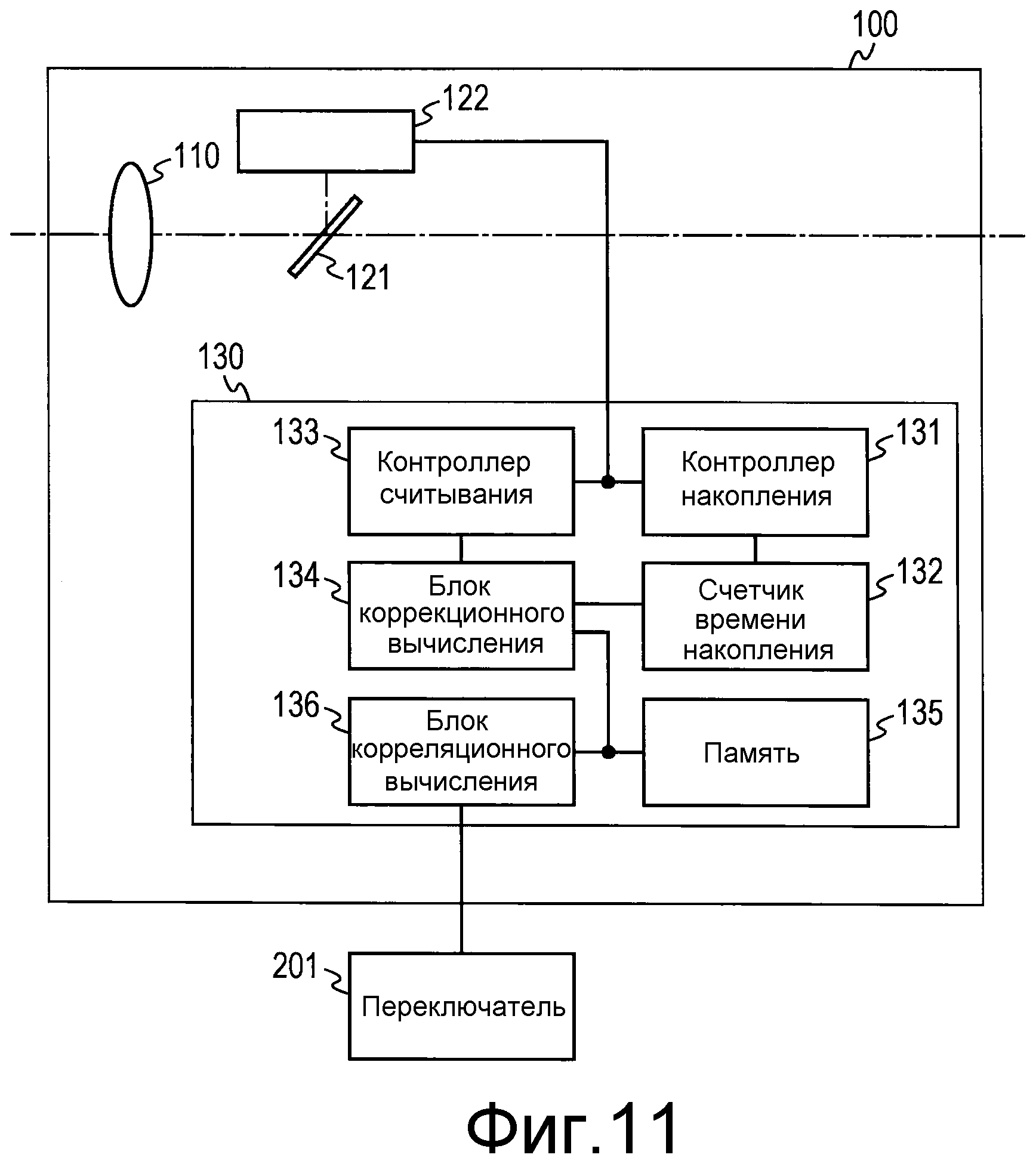
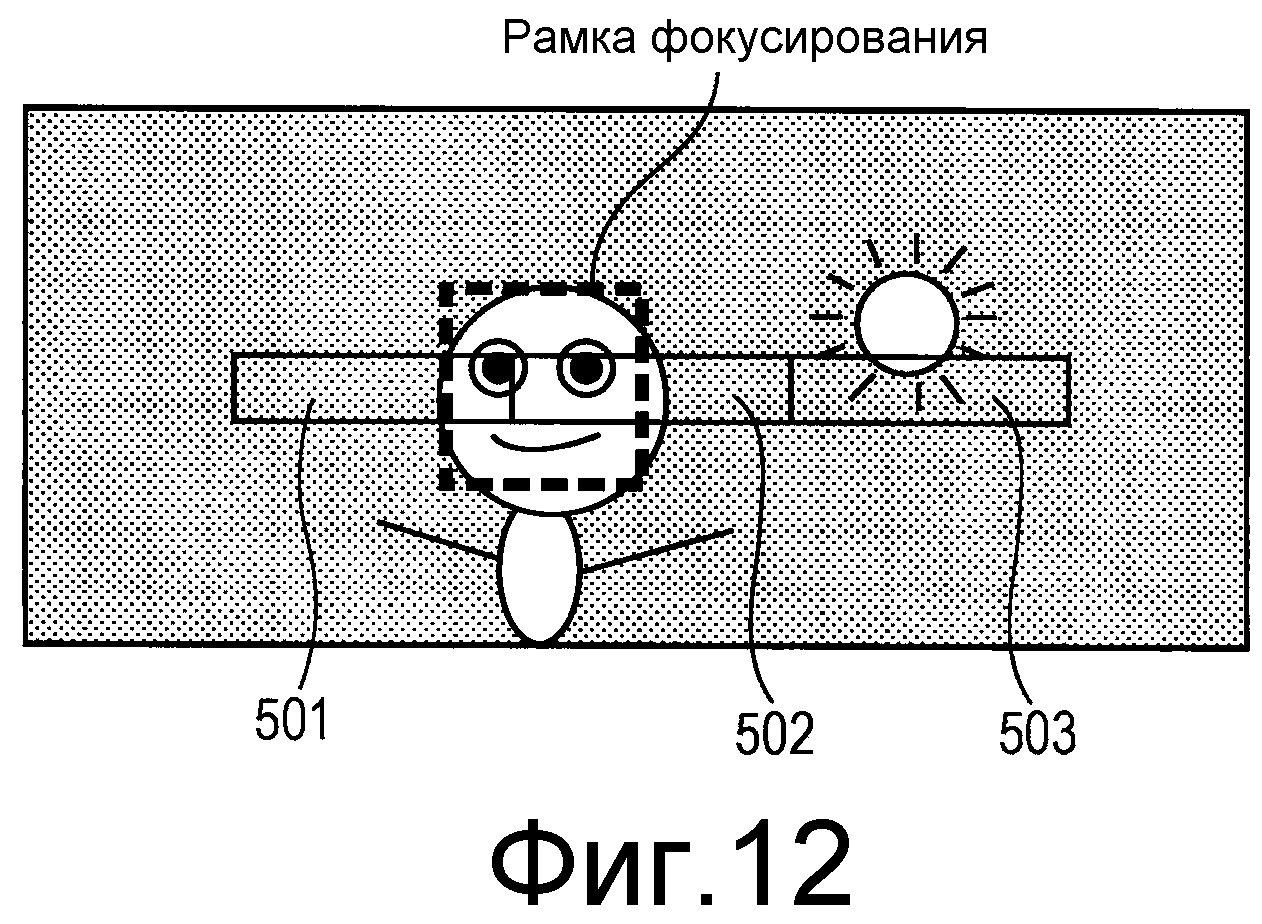
Фиг.11 иллюстрирует конфигурационную схему этого варианта осуществления. Конфигурация второго варианта осуществления включает в себя в дополнение к подобной конфигурации первого варианта осуществления, проиллюстрированного на фиг.1, переключатель 201 в качестве средства выбора диапазона для выбора произвольного объекта. Фиг.12 иллюстрирует схему захвата изображения, указывающую кадр автофокусирования для выбора объекта фокусирования переключателем 201. Как проиллюстрировано на фиг.12, объект присутствует на зональных датчиках 501 и 502 подобно первому варианту осуществления. В этом варианте осуществления описывается пример, в котором положение фокуса целевого объекта обнаруживается с высокой точностью в композиции захвата изображения, проиллюстрированной на фиг.12.
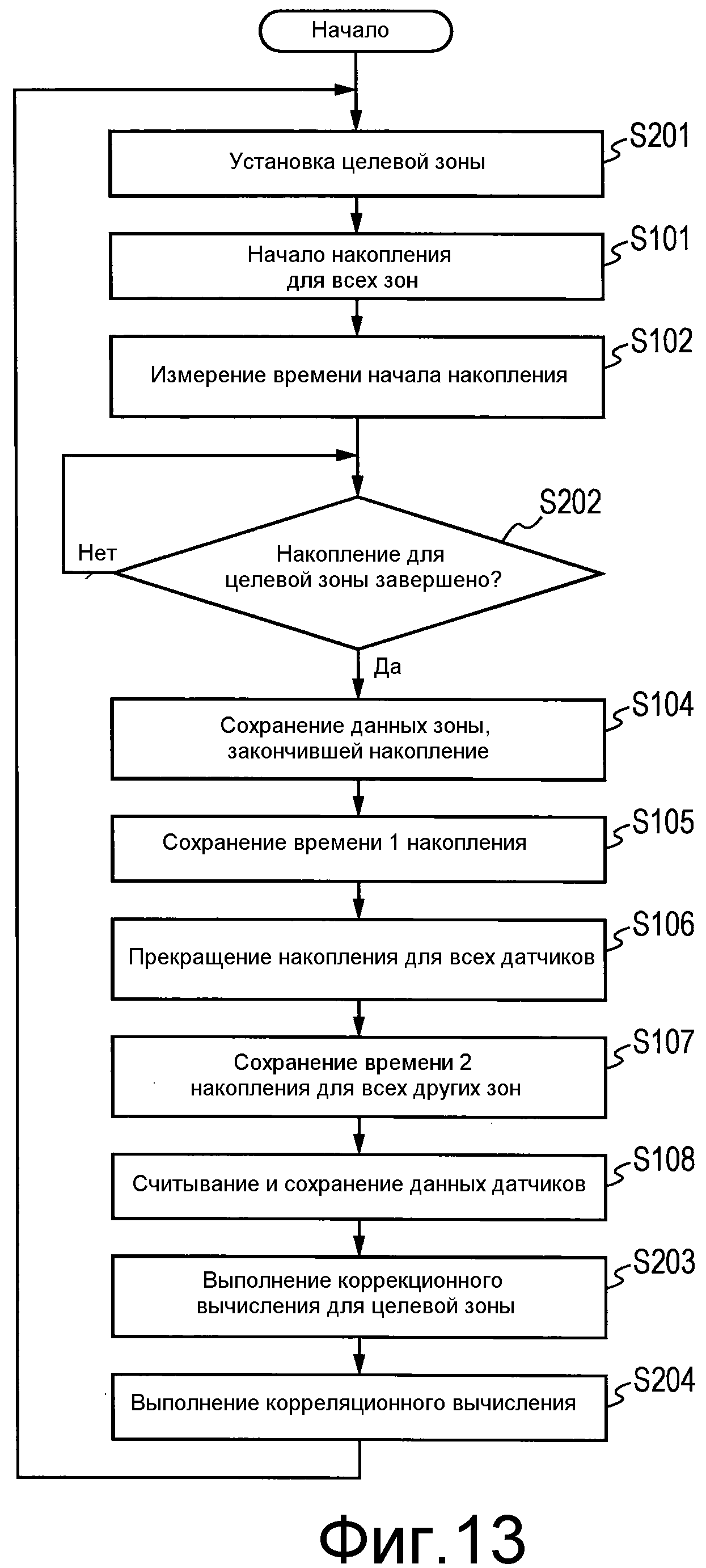
Фиг.13 - блок-схема, иллюстрирующая последовательность операций, выполняемую устройством 100 обнаружения фокуса. ЦП 130 управляет последовательностью операций согласно компьютерной программе (не показана), сохраненной в памяти.
Когда питание подается к устройству 100 обнаружения фокуса, ЦП 130 переходит к этапу S201 для различения датчика, соответствующего зоне кадра автофокусирования, выбранной переключателем 201. Согласно схеме захвата изображения, проиллюстрированной на фиг.12, в этом случае выбираются зональные датчики 501 и 502.
Далее последовательность операций продолжается этапом S101, на котором контроллер 131 накопления начинает накопление для всех зональных датчиков датчика 122 подобно первому варианту осуществления. Затем последовательность операций продолжается этапом S102, на котором счетчик 132 времени накопления начинает измерение времени накопления.
Далее последовательность операций продолжается этапом S202. На этапе S202 контроллер 131 накопления ожидает завершения накопления целевых зональных датчиков, соответствующих рамке фокусирования, выбранной на этапе S201. Сначала завершается накопление зонального датчика 503. Накопление завершается сначала в зональном датчике 503, так как источник света присутствует сзади объекта и зональный датчик 503 имеет более высокую степень освещения, чем зональный датчик 501 или 502 на которых присутствует объект.
Здесь на этапе S202 фиг.13 последовательность операций до завершения накопления целевых зональных датчиков описана, ссылаясь на фиг.10, 14 и 15. Фиг.14 - схема, иллюстрирующая данные накопления каждого зонального датчика с датчика 122 в каждой последовательности операций. Фиг.15 иллюстрирует время накопления каждого зонального датчика с датчика 122. Фиг.10 иллюстрирует уровень накопления каждого зонального датчика в момент времени, когда завершается накопление зонального датчика 503. Время накопления зонального датчика 503 в этот момент времени составляет 0,4 мс, как проиллюстрировано на фиг.15. Так как зональный датчик 503 не является целевым зональным датчиком, выбранным на этапе S201, после этого этап S202 выполняется повторно. Затем, как проиллюстрировано в части зонального датчика 502, в части (а) фиг.14, зональный датчик 502 в качестве целевого датчика достигает порогового значения AGC для завершения накопления, и последовательность операций продолжается этапом S104.
Последовательность операций от этапа S104 до этапа S108 является подобной первому варианту осуществления. На этапе S104 зональный датчик 502 сохраняется контроллером 131 накопления в качестве целевого зонального датчика, для которого было завершено накопление. Затем на этапе S105 счетчик 132 времени накопления сохраняет время накопления 2,0 мс зонального датчика 502, проиллюстрированное на фиг.15 в качестве времени 1 накопления. Затем выполняется этап S106, и накопление зонального датчика 501 завершается контроллером 131 накопления.
Далее последовательность операций продолжается этапом S107, на котором время накопления 2,1 мс зонального датчика 501 сохраняется в качестве времени 2 накопления счетчиком 132 времени накопления. Время накопления соответственных зональных датчиков в этом случае проиллюстрировано на фиг.15.
Далее последовательность операций продолжается этапом S108. Данные накопления датчика 122, которые должны быть считаны контроллером 133 считывания, являются такими, как проиллюстрировано в части (а) фиг.14. В части (а) фиг.14 указывается, что зональные датчики 502 и 503 достигли порогового значения AGC на этапе S202 для завершения накопления. Затем накопление зонального датчика 501 выполняется в периоде времени от этапа S202 до этапа S106, т.е. 0,1 мс, что является значением разницы времени накопления между зональными датчиками 501 и 502. Следовательно, понятно, что возникает отсутствие непрерывности в данных накопления на границе между зональными датчиками 501 и 502.
Далее последовательность операций продолжается этапом S203, на котором выполняется коррекционное вычисление для целевых зональных датчиков. Среди зональных датчиков 501 и 502, которые являются целевыми зональными датчиками, установленными на этапе S201, коррекционное вычисление применяется к зональному датчику 501, который является зональным датчиком, исключая зональный датчик 502, который закончил накопление и информация о котором была сохранена на этапе S104. Уравнение коррекционного вычисления выражено в уравнении (1) в первом варианте осуществления. В результате применения этого коррекционного вычисления получается часть (b) фиг.14.
Затем последовательность операций продолжается этапом S204, на котором данные, соответствующие зоне, выбранной переключателем 201, считываются из памяти 135, а части данных связываются для выполнения корреляционного вычисления. Данные накопления и диапазон корреляционного вычисления в этом случае являются такими, как проиллюстрировано в части (b) фиг.15.
ЦП 130 выполняет этап S204, а затем повторно выполняет последовательность операций с этапа S201.
Таким образом, при размещении блока выбора целевого объекта является возможным выполнить накопление так, чтобы целевой зональный датчик имел подходящий контраст. Затем при помощи коррекционного блока для границы между зональными датчиками является возможным извлечь подходящие данные накопления в зоне, соответствующей целевому объекту с тем, чтобы улучшить точность корреляционного вычисления.
Приведенные примерные варианты осуществления настоящего изобретения описаны выше, но, само собой разумеется, что настоящее изобретение не ограничено этими вариантами осуществления и в пределах объема и сущности настоящего изобретения могут быть выполнены различные модификации и изменения.
Например, возможно сочетать последовательности операций, описанных в первом варианте осуществления и во втором варианте осуществления. Дополнительно, возможно осуществлять переключение между процессами при помощи переключателя для того, чтобы поддерживать множество вариантов захвата изображения.
Заметим, что первый вариант осуществления и второй вариант осуществления описывают конфигурационные примеры способа разности фаз TTL, хотя тот же эффект может быть получен при конфигурации способа внешнего измерения, в котором датчик 122 размещен вне устройства 100 обнаружения фокуса без использования половинного зеркала 121, а для обнаружения фокусной точки используется внешний луч.
В дополнение в вариантах осуществления настоящего изобретения используется зональный датчик, образованный из трех зональных датчиков но, само собой разумеется, что количество зональных датчиков не ограничено. Настоящее изобретение может быть применено также к конфигурации, в которой множество зональных датчиков расположено в вертикальном направлении или в горизонтальном направлении. Однако если части данных связываются для выполнения корреляционного вычисления после коррекционного вычисления настоящего изобретения, является желательным то, чтобы зональные датчики были бы примыкающими друг к другу. Если между зональными датчиками, которые должны быть связаны, существует пространство, возможно преобразовать пространство на основе взаимоотношения между данными изображения, образованными на датчике, и фокусным расстоянием, а затем связать части данных с тем, чтобы выполнить корреляционное вычисление.
Дополнительно в настоящем изобретении отдельные компоненты за исключением переключателя 201 расположены в устройстве 100 обнаружения фокуса, как проиллюстрировано на фиг.11, но компоненты могут быть распределены по различным устройствам. В дополнение, контроллер 131 накопления, счетчик 132 времени накопления, контроллер 133 считывания, блок 134 коррекционного вычисления, память 135 и блок 136 корреляционного вычисления размещены в одном ЦП 130, но блоки могут быть распределены в различных ЦП и арифметических блоках, или могут быть образованы аппаратными средствами, или могут быть предусмотрены за пределам устройства 100 обнаружения фокуса.
В дополнение поясняется, что часть отставания во времени между этапом S101 и S102, отставание во времени между этапом S103 и этапом S105, а также отставание во времени между этапом S106 и S107, описанными на фиг.5, являются ничтожно малыми в первом варианте осуществления. В дополнение поясняется, что часть отставания во времени между этапом S101 и этапом S102, отставания во времени между этапом S202 и этапом S105, а также отставания во времени между этапом S106 и этапом S107 на фиг.13 являются ничтожно малыми во втором варианте осуществления. Однако в строгом случае существует элемент, генерирующий отставание во времени в зависимости от конфигурационного способа, и может быть сложным измерить действительное время накопления каждого зонального датчика. Следовательно, если отставание во времени заранее известно, возможно обеспечить смещение или коэффициент для времени 1 накопления или времени 2 накопления в уравнении (1) для коррекционного вычисления. В дополнение, если время 1 накопления не может быть точно измерено, время задержки для конструкции или время разницы между зональными датчиками времени накопления, измеренное другим блоком, может быть заранее включено в качестве константы в уравнение (1) для коррекционного вычисления. Другими словами время 1 накопления плюс предопределенное время разницы может быть установлено в качестве времени 2 накопления.
В дополнение переключатель 201 используется для выбора целевого зонального датчика, а накопление зональных датчиков начинается на этапе S101 фиг.13 во втором варианте осуществления, но также возможно выполнить накопление только в целевом зональном датчике, установленном на этапе S201. В дополнение корреляционное вычисление выполняется только в зоне, выбранной переключателем 201, на этапе S204 фиг.13, но также возможно использовать все зональные датчики, к которым принадлежит зона, выбранная переключателем 201, для выполнения корреляционного вычисления.
В дополнение второй вариант осуществления описывает пример, в котором выбирается целевая зона и ожидается завершение накопления целевой зоны, даже если существует источник света высокой яркости или подобное, но также возможно получить тот же самый эффект без выбора целевой зоны. Более точно может быть выполнена следующая последовательность операций. Сначала устанавливается пороговое значение времени накопления. Затем, если накопление завершается более короткий период времени, чем пороговое значение времени накопления, определяется, что свет от источника света (объекта) высокой яркости попадает на датчик (зональный датчик), который закончил накопление в короткий период времени. Здесь является желательным продолжить накопление в другом датчике (зональном датчике), даже если накопление датчика определенного для приема света от источника света высокой яркости было завершено. Дополнительно, датчик, определенный для приема света от источника света высокой яркости, не ограничен одним, а их может быть множество, как само собой разумеется. В дополнение пороговое значение времени накопления может быть установлено произвольно оператором, или может быть автоматически получено устройством настоящего изобретения на основе количества света, попадающего на зональный датчик (объектного изображения, или объектного изображения на элементе захвата изображения, или количества света на элементе захвата изображения).
Как описано выше, устройство обнаружения фокуса настоящего изобретения дает возможность выполнить обнаружение фокуса объекта для множества зон с высокой точностью в короткий период времени. В дополнение возможно реализовать устройство съемки изображения, имеющее эффект настоящего изобретения, предоставляя устройство съемки изображения с устройством обнаружения фокуса.
Хотя настоящее изобретение было описано со ссылкой к примерным вариантам осуществления, должно быть понятным, что изобретение не ограничено примерными раскрытыми вариантами осуществления. Объем следующей формулы изобретения должен соответствовать расширенному толкованию с тем, чтобы заключать все такие модификации, эквивалентные структуры и функции.
Реферат
Устройство обнаружения фокуса включает в себя: блок фотоэлектрического преобразования типа накопления заряда, включающий в себя множество датчиков; контроллер накопления для управления накоплением заряда блока фотоэлектрического преобразования; блок измерения времени накопления для измерения времени накопления; блок коррекционного вычисления для выполнения коррекционного вычисления сигнала фотоэлектрического преобразования; блок вычисления обнаружения фокуса для выполнения вычисления обнаружения фокуса. Контроллер накопления обнаруживает сигнал завершения накопления в первом датчике из множества датчиков, а затем вынуждает датчики, за исключением первого датчика, завершить накопление заряда. Блок коррекционного вычисления выполняет коррекционное вычисление сигнала фотоэлектрического преобразования на основе первого времени накопления, которое является временем накопления первого датчика, и второго времени накопления, которое отличается от первого времени накопления. Технический результат - повышение точности обнаружения фокуса за короткий период времени. 2 н. и 7 з.п. ф-лы, 15 ил.
Формула
блок фотоэлектрического преобразования типа накопления заряда, включающий множество датчиков, каждый из которых имеет множество пикселей изображения;
контроллер накопления для управления накоплением заряда блока фотоэлектрического преобразования;
блок измерения времени накопления для измерения времени накопления от начала накопления заряда до конца накопления заряда каждого из множества датчиков блока фотоэлектрического преобразования;
блок коррекционного вычисления для коррекционного вычисления сигнала фотоэлектрического преобразования каждого из множества датчиков блока коррекционного преобразования; и
блок вычисления обнаружения фокуса для вычисления обнаружения фокуса, используя сигнал фотоэлектрического преобразования, откорректированный блоком коррекционного вычисления, в котором:
контроллер накопления обнаруживает сигнал завершения накопления в первом датчике из множества датчиков, и затем вынуждает датчики, за исключением первого датчика, закончить накопление заряда; и
блок коррекционного вычисления выполняет коррекционное вычисление сигнала фотоэлектрического преобразования на основе первого времени накопления, которое является временем накопления первого датчика, и второго времени накопления, которое отличается от первого времени накопления.
в котором среди датчиков, выбранных переключателем диапазона, датчик, в котором накопление было завершено в первую очередь, рассматривается в качестве первого датчика.
Комментарии