Устройство регулировки фокуса, устройство формирования изображения и объектив - RU2756433C2
Код документа: RU2756433C2
Чертежи














Описание
Область техники
[0001] Настоящее изобретение относится к устройству регулировки фокуса, устройству формирования изображения и объективу.
Описание уровня техники
[0002] В настоящее время известен подход вычисления оценочного значения в отношении контрастности посредством оптической системы во время приведения в движение линзы регулировки фокуса с заранее определенной скоростью движения в направлении оптической оси, для обнаружения, таким образом, состояния фокусировки оптической системы (см., например, патентный источник 1: JP2010-139666A).
[0003] Патентный источник 1: JP2010-139666A
Сущность изобретения
[0004] Задачи настоящего изобретения включают в себя обеспечение устройства регулировки фокуса, которое надлежащим образом обнаруживать состояние регулировки фокуса оптической системы.
[0005] Настоящее изобретение обеспечивает следующее средство решения вышеупомянутых задач.
[0006] Устройство управления регулировкой фокуса по п.1 отличается тем, что содержит: блок обнаружения фокуса, который вычисляет оценочное значение в отношении контрастности изображения посредством оптической системы для обнаружения состояния регулировки фокуса оптической системы; блок получения, который получает от объектива, по меньшей мере, одно из максимального значения и минимального значения коэффициента перемещения плоскости изображения, которое представляет отношение соответствия между величиной перемещения линзы регулировки фокуса, входящей в состав оптической системы, и величиной перемещения плоскости изображения; и блок управления, который использует, по меньшей мере, одно из максимального значения и минимального значения коэффициента перемещения плоскости изображения для определения скорости движения для линзы регулировки фокуса, когда блок обнаружения фокуса обнаруживает состояние регулировки фокуса.
Устройство управления регулировкой фокуса по п.2, в устройстве управления регулировкой фокуса по п.1, отличается тем, что, когда величина перемещения в направлении оптической оси линзы регулировки фокуса равна TL, и величина перемещения плоскости изображения равна TI, коэффициент перемещения плоскости изображения является коэффициентом, который соответствует отношению, задаваемому TL и TI и определяется в зависимости от позиции линзы для линзы регулировки фокуса.
Устройство управления регулировкой фокуса по п.3, в устройстве управления регулировкой фокуса по п.2, отличается тем, что, когда коэффициент перемещения плоскости изображения является коэффициентом, который соответствует TI/TL, блок управления использует максимальное значение коэффициента перемещения плоскости изображения для определения скорости движения, которая является скоростью, которая позволяет блоку обнаружения фокуса обнаруживать состояние регулировки фокуса, даже если линза регулировки фокуса перемещается в позицию, в которой коэффициент перемещения плоскости изображения является максимальным значением коэффициента перемещения плоскости изображения, или когда коэффициент перемещения плоскости изображения является коэффициентом, который соответствует TL/TI, блок управления использует минимальное значение коэффициента перемещения плоскости изображения для определения скорости движения, которая является скоростью, которая позволяет блоку обнаружения фокуса обнаруживать состояние регулировки фокуса, даже если линза регулировки фокуса перемещается в позицию, в которой коэффициент перемещения плоскости изображения является минимальным значением коэффициента перемещения плоскости изображения.
Устройство управления регулировкой фокуса по п.4 отличается тем, что содержит: блок обнаружения фокуса, который вычисляет оценочное значение в отношении контрастности изображения посредством оптической системы для обнаружения состояния регулировки фокуса оптической системы; блок получения, который получает от объектива коэффициент перемещения плоскости изображения, который представляет отношение соответствия между величиной перемещения линзы регулировки фокуса, входящей в состав оптической системы, и величиной перемещения плоскости изображения, и информацию, касающуюся величины люфта оптической системы; блок управления, который осуществляет управление сканированием для сканирования посредством линзы регулировки фокуса, когда блок обнаружения фокуса обнаруживает состояние регулировки фокуса и осуществляет, после того, как блок обнаружения фокуса обнаруживает сфокусированную позицию, управление фокусирующим движением для перемещения линзы регулировки фокуса в сфокусированную позицию; и блок управления, который использует коэффициент перемещения плоскости изображения и величину люфта для определения, осуществлять ли уменьшение люфта при управлении фокусирующим движением.
Устройство управления регулировкой фокуса по п.5, в устройстве управления регулировкой фокуса по п.4, отличается тем, что блок управления использует коэффициент перемещения плоскости изображения и величину люфта для вычисления величины перемещения плоскости изображения, соответствующей величине люфта, и сравнивает вычисленную величину перемещения плоскости изображения, соответствующую величине люфта, с глубиной фокусировки изображения посредством оптической системы для определения, осуществлять ли уменьшение люфта при управлении фокусирующим движением.
[0007] Устройство управления регулировкой фокуса по п.6, в устройстве управления регулировкой фокуса по п.4 или 5, отличается тем, что блок управления использует коэффициент перемещения плоскости изображения и величину люфта для определения, осуществлять ли уменьшение люфта при управлении фокусирующим движением, причем коэффициент перемещения плоскости изображения, соответствующие позиции линзы для линзы регулировки фокуса, когда линза регулировки фокуса приводится в обратное движение в сфокусированную позицию после обнаружения сфокусированной позиции.
Устройство управления регулировкой фокуса по п.7, в устройстве управления регулировкой фокуса по п.4 или 5, отличается тем, что, когда величина перемещения в направлении оптической оси линзы регулировки фокуса равна TL, и величина перемещения плоскости изображения равна TI, коэффициент перемещения плоскости изображения является коэффициентом, который соответствует отношению, задаваемому TL и TI, и когда коэффициент перемещения плоскости изображения является коэффициентом, который соответствует TI/TL, блок управления использует максимальное значение коэффициента перемещения плоскости изображения и величину люфта для определения, осуществлять ли уменьшение люфта при управлении фокусирующим движением, или когда коэффициент перемещения плоскости изображения является коэффициентом, который соответствует TL/TI, блок управления использует минимальное значение коэффициента перемещения плоскости изображения и величину люфта для определения, осуществлять ли уменьшение люфта при управлении фокусирующим движением.
Устройство управления регулировкой фокуса по п.8, в устройстве управления регулировкой фокуса по п.4 или 5, отличается тем, что блок управления использует коэффициент перемещения плоскости изображения и величину люфта для определения, осуществлять ли уменьшение люфта при управлении фокусирующим движением, причем коэффициент перемещения плоскости изображения соответствует позиции линзы для линзы регулировки фокуса в окрестности сфокусированной позиции линзы регулировки фокуса.
Устройство формирования изображения по п.9 содержит устройство управления регулировкой фокуса по любому из пп.1-8.
Объектив по п.10 отличается тем, что содержит: оптическую систему, которая включает в себя линзу регулировки фокуса; блок привода, который приводит в движение линзу регулировки фокуса в направлении оптической оси; приемопередающий блок, который осуществляет передачу и прием сигнала между объективом и корпусом камеры; и блок управления, который, в случае приема заранее определенного сигнала от корпуса камеры через приемопередающий блок, передает на корпус камеры через приемопередающий блок, по меньшей мере, одно из максимального значения и минимального значения коэффициента перемещения плоскости изображения, которое представляет отношение соответствия между величиной перемещения линзы регулировки фокуса и величиной перемещения плоскости изображения.
[0008] Объектив по п.11, в объективе по п.10, отличается тем, что дополнительно содержит блок хранения, где хранится, по меньшей мере, одно из максимального значения и минимального значения коэффициента перемещения плоскости изображения.
Объектив по п.12, в объективе по п.10 или 11, отличается тем, что коэффициент перемещения плоскости изображения соответствует отношению, задаваемому величиной перемещения в направлении оптической оси линзы регулировки фокуса и величиной перемещения плоскости изображения по оптической оси.
Объектив по п.13 отличается тем, что содержит: оптическую систему, которая включает в себя линзу регулировки фокуса; блок привода, который приводит в движение линзу регулировки фокуса в направлении оптической оси; приемопередающий блок, который осуществляет передачу и прием сигнала между объективом и корпусом камеры; и блок управления, который управляет приемопередающим блоком так, что приемопередающий блок передает, на корпус камеры, первую информацию, определяемую в зависимости от позиции линзы для линзы регулировки фокуса, причем блок управления, в случае приема заранее определенного сигнала от корпуса камеры через приемопередающий блок, передает на корпус камеры через приемопередающий блок, по меньшей мере, одно из максимального значения и минимального значения первой информации.
Объектив по п.14, в объективе по п.13, отличается тем, что, когда величина перемещения линзы регулировки фокуса равна TL, и величина перемещения плоскости изображения равна TI, первая информация является коэффициентом, который соответствует TL/TI, или коэффициентом, который соответствует TI/TL.
Объектив по п.15 отличается тем, что содержит: оптическую систему, которая включает в себя линзу регулировки фокуса; блок привода, который приводит в движение линзу регулировки фокуса в направлении оптической оси; приемопередающий блок, который осуществляет передачу и прием сигнала между объективом и корпусом камеры; и блок управления, который управляет приемопередающим блоком так, что приемопередающий блок передает на корпус камеры первый коэффициент перемещения плоскости изображения, определяемый в зависимости от позиции линзы для линзы регулировки фокуса, причем блок управления, в случае приема заранее определенного сигнала от корпуса камеры через приемопередающий блок, передает на корпус камеры через приемопередающий блок второй коэффициент перемещения плоскости изображения, который не зависит от позиции линзы для линзы регулировки фокуса.
[0009] Объектив по п.16, в объективе по п.15, отличается тем, что второй коэффициент перемещения плоскости изображения является, по меньшей мере, одним из максимального значения и минимального значения первого коэффициента перемещения плоскости изображения.
Объектив по п.17, в объективе по п.15 или 16, отличается тем, что дополнительно содержит блок привода линзы трансфокации, который приводит в движение линзу трансфокации в направлении оптической оси, в котором, когда фокусное расстояние линзы трансфокации не изменяется, второй коэффициент перемещения плоскости изображения не изменяется, даже если позиция линзы для линзы регулировки фокуса изменяется, но когда фокусное расстояние линзы трансфокации изменяется, второй коэффициент перемещения плоскости изображения изменяется.
Корпус камеры по п.18 отличается тем, что содержит: блок обнаружения фокуса, который вычисляет оценочное значение в отношении контрастности изображения посредством оптической системы для обнаружения состояния регулировки фокуса оптической системы; приемопередающий блок, который осуществляет передачу и прием сигнала между корпусом камеры и объективом; и блок управления, который использует сигнал, принятый через приемопередающий блок, для осуществления управления приводом для линзы регулировки фокуса, входящей в состав оптической системы, причем блок управления управляет приемопередающим блоком так, что приемопередающий блок передает на объектив первый сигнал запроса, который запрашивает первый коэффициент перемещения плоскости изображения, определяемый в зависимости от позиции линзы для линзы регулировки фокуса, и второй сигнал запроса, который запрашивает второй коэффициент перемещения плоскости изображения, определяемый вне зависимости от позиции линзы для линзы регулировки фокуса, и принимает первый коэффициент перемещения плоскости изображения и второй коэффициент перемещения плоскости изображения от объектива.
Корпус камеры по п.19, в корпусе камеры по п.18, отличается тем, что второй коэффициент перемещения плоскости изображения является, по меньшей мере, одним из максимального значения и минимального значения первого коэффициента перемещения плоскости изображения.
Корпус камеры по п.20, в корпусе камеры по п.19, отличается тем, что, когда величина перемещения в направлении оптической оси линзы регулировки фокуса равна TL, и величина перемещения плоскости изображения равна TI, коэффициент перемещения плоскости изображения является коэффициентом, который соответствует отношению, задаваемому TL и TI, и блок управления осуществляет заранее определенную операцию, когда коэффициент перемещения плоскости изображения является коэффициентом, который соответствует TI/TL, и определено, что первый коэффициент перемещения плоскости изображения, соответствующий текущей позиции линзы для линзы регулировки фокуса, больше второго коэффициента перемещения плоскости изображения, или когда коэффициент перемещения плоскости изображения является коэффициентом, который соответствует TL/TI, и определено, что первый коэффициент перемещения плоскости изображения, соответствующий текущей позиции линзы для линзы регулировки фокуса, меньше второго коэффициента перемещения плоскости изображения.
[0010] Корпус камеры по п.21, в корпусе камеры по п.19, отличается тем, что блок управления осуществляет заранее определенную операцию, когда первый коэффициент перемещения плоскости изображения, равный второму коэффициенту перемещения плоскости изображения, не обнаружен в результате получения первого коэффициента перемещения плоскости изображения, соответствующего текущей позиции линзы для линзы регулировки фокуса во время приведения в движение линзы регулировки фокуса от одного конца к другому концу в направлении оптической оси.
Корпус камеры по п.22, в корпусе камеры по п.20 или 21, отличается тем, что заранее определенная операция является, по меньшей мере, одним из управления, которое осуществляет поисковое движение линзы регулировки фокуса со второй скоростью, которая ниже первой скорости, которая является скоростью поискового движения до определения, управления, которое запрещает извещать фотографа о получении сфокусированного состояния, и управления, которое запрещает блоку обнаружения фокуса обнаруживать состояние регулировки фокуса.
Система камеры по п.23 отличается тем, что содержит корпус камеры по любому из пп.18-22 и объектив.
[0011] Согласно настоящему изобретению, можно надлежащим образом обнаруживать состояние регулировки фокуса оптической системы.
Краткое описание чертежей
[0012] Фиг. 1 - блок-схема, демонстрирующая камеру согласно вариантам осуществления настоящего изобретения;
фиг. 2 - планарный вид спереди, демонстрирующий плоскость формирования изображения устройства формирования изображения, показанного на фиг. 1;
фиг. 3 - планарный вид спереди, где в увеличенном виде изображена часть III фиг. 2 для схематической демонстрации компоновки пикселей 222a и 222b обнаружения фокуса;
фиг. 4(A) - планарный вид спереди, демонстрирующий в увеличенном виде один из пикселей 221 формирования изображения;
фиг. 4(B) - планарный вид спереди, демонстрирующий в увеличенном виде один из пикселей 222a обнаружения фокуса;
фиг. 4(C) - планарный вид спереди, демонстрирующий в увеличенном виде один из пикселей 222b обнаружения фокуса;
фиг. 4(D) - вид в разрезе, демонстрирующий в увеличенном виде один из пикселей 221 формирования изображения;
фиг. 4(E) - вид в разрезе, демонстрирующий в увеличенном виде один из пикселей 222a обнаружения фокуса;
фиг. 4(F) - вид в разрезе, демонстрирующий в увеличенном виде один из пикселей 222b обнаружения фокуса;
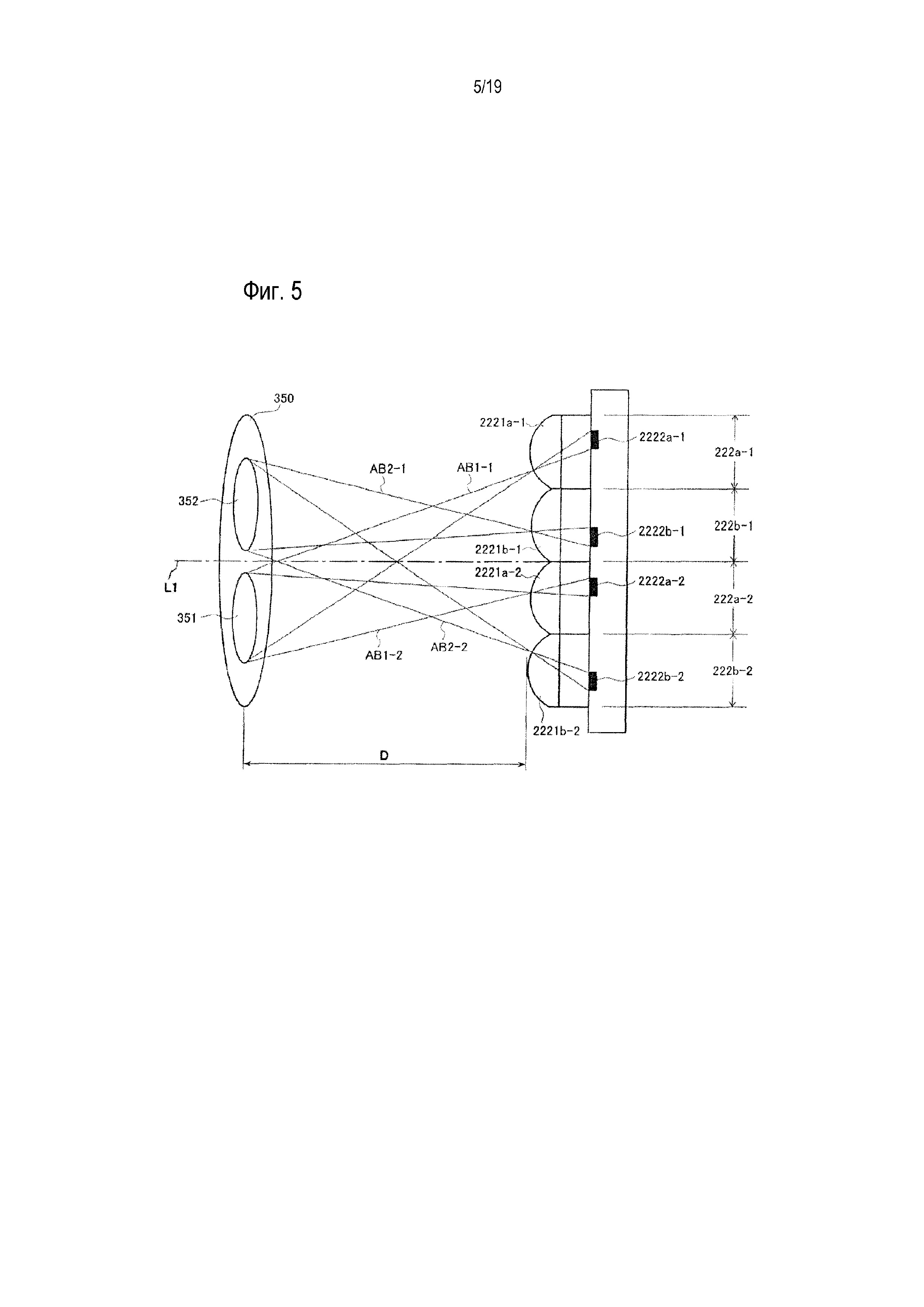
фиг. 5 - вид в разрезе по линии V-V, показанной на фиг. 3;
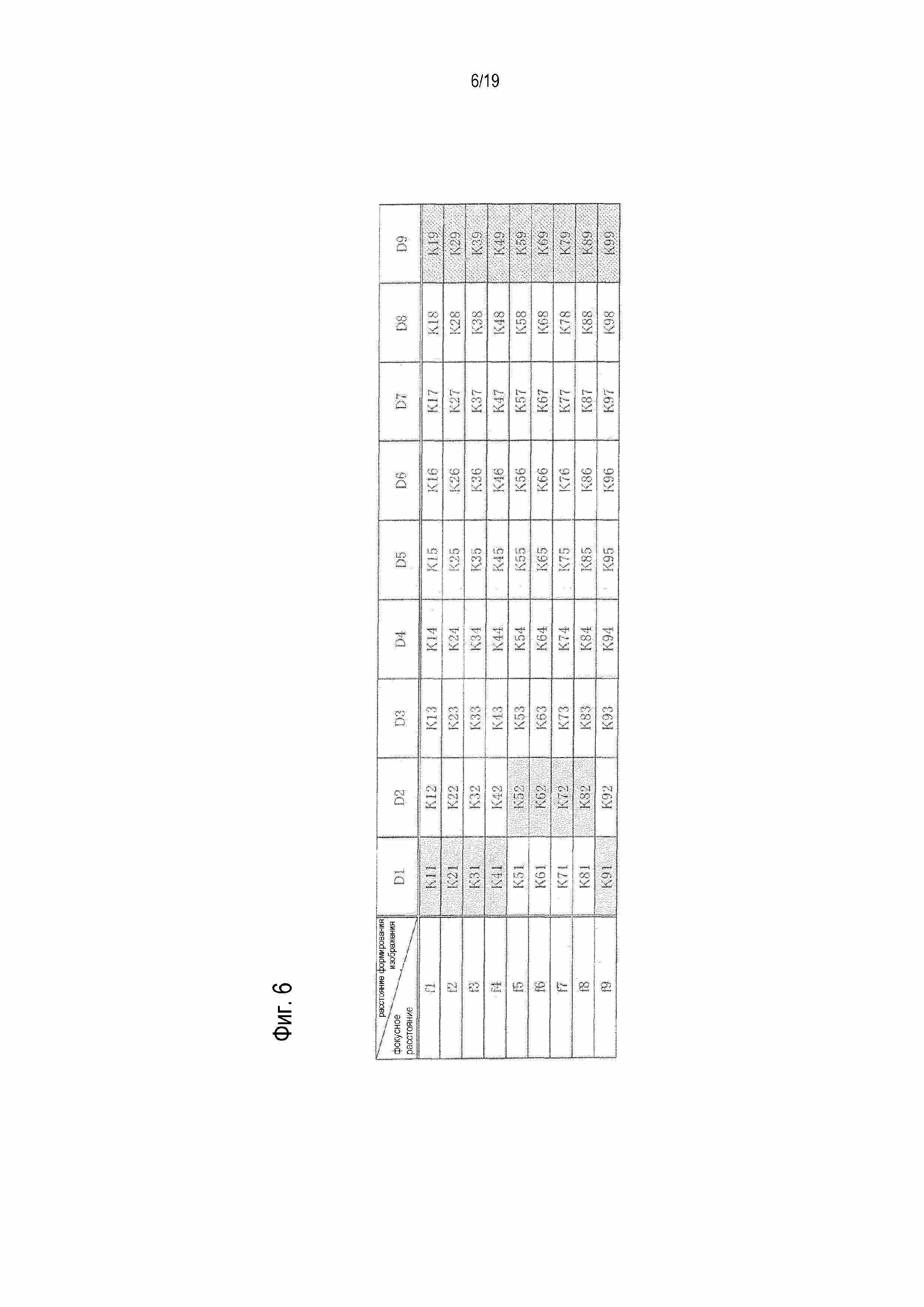
фиг. 6 изображает таблицу, демонстрирующую соотношение между позицией линзы для линзы 32 трансфокации (фокусным расстоянием) и позицией линзы для фокусирующей линзы 33 (расстоянием формирования изображения), и коэффициентом K перемещения плоскости изображения;
фиг. 7 - блок-схема операций, демонстрирующая принцип действия первого варианта осуществления;
фиг. 8 - вид, поясняющий величину G люфта механизма передачи движения для фокусирующей линзы 33;
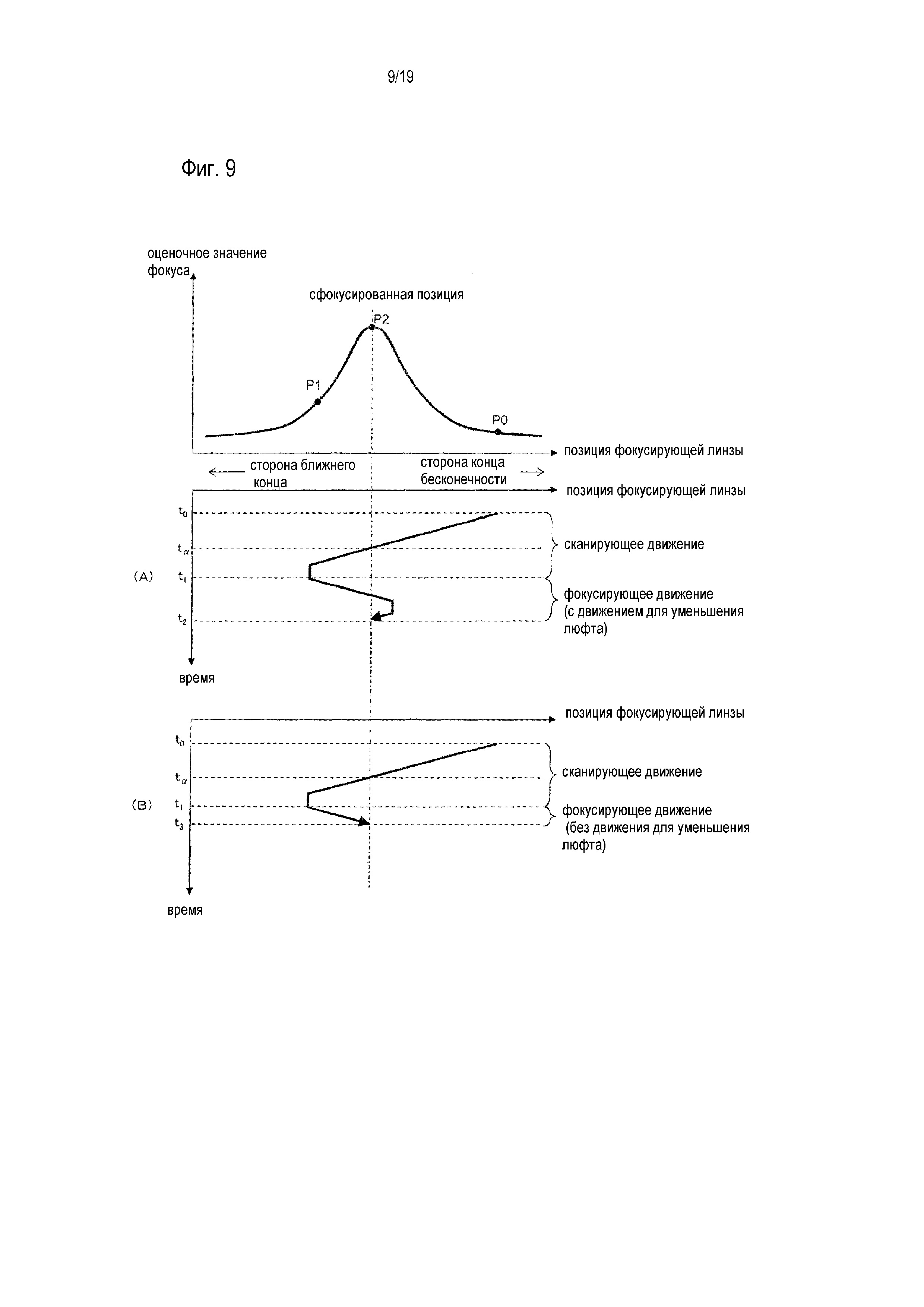
фиг. 9 - набор диаграмм, демонстрирующих соотношение между позицией фокусирующей линзы и оценочным значением фокуса и соотношения между позицией фокусирующей линзы и временем, когда операция сканирования и фокусирующее движение на основе системы обнаружения контрастности осуществляются согласно варианту осуществления, описанному ниже;
фиг. 10 - блок-схема операций, демонстрирующая принцип действия согласно второму варианту осуществления;
фиг. 11 - блок-схема операций, демонстрирующая принцип действия согласно третьему варианту осуществления;
фиг. 12 - блок-схема операций, демонстрирующая принцип действия согласно четвертому варианту осуществления;
фиг. 13 - блок-схема, демонстрирующая камеру согласно пятому варианту осуществления;
фиг. 14 - блок-схема операций, демонстрирующая принцип действия согласно пятому варианту осуществления;
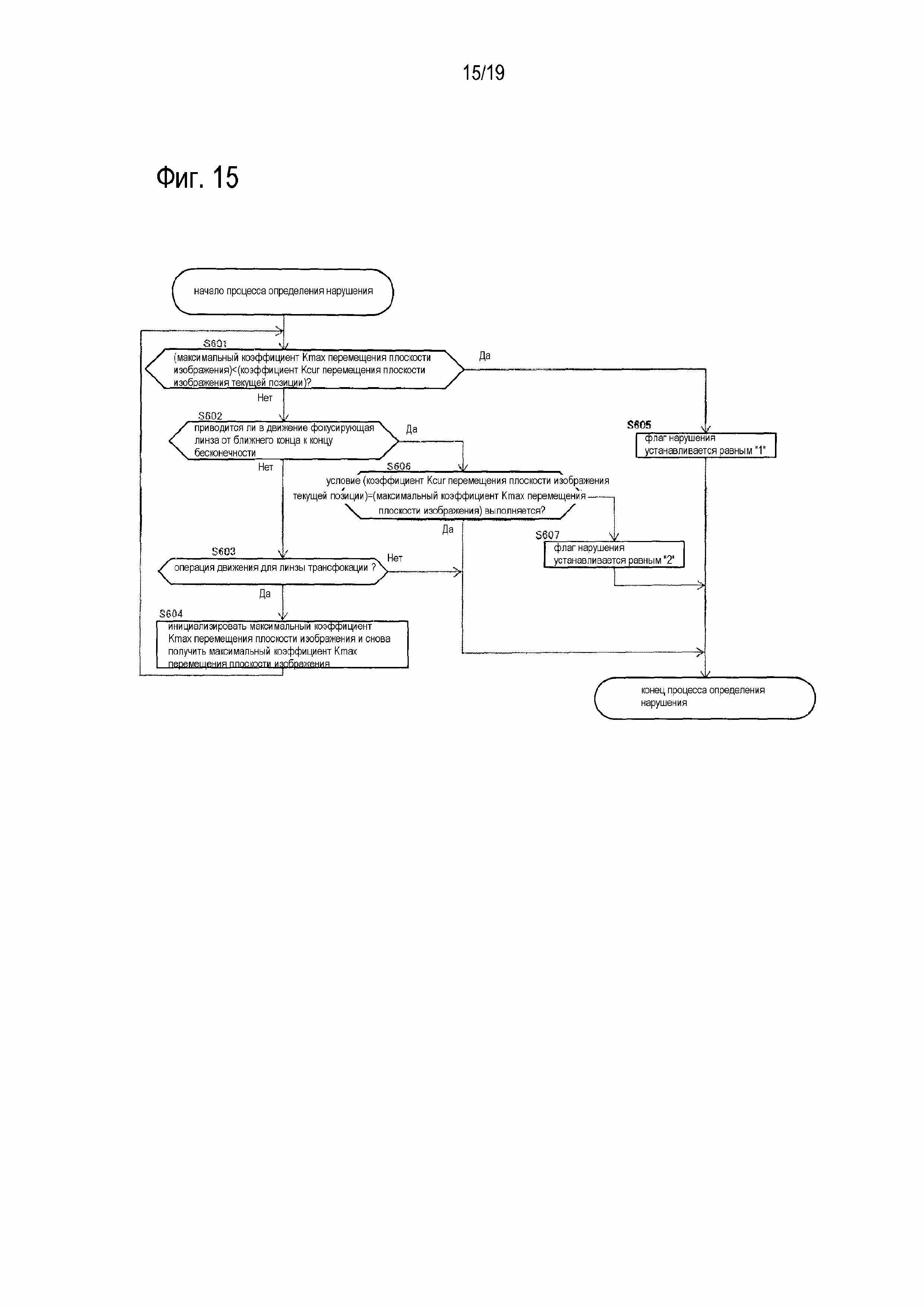
фиг. 15 - блок-схема операций, демонстрирующая процесс определения нарушения согласно пятому варианту осуществления;
фиг. 16 - диаграмма, демонстрирующая пример одной сцены, поясняющий конкретный пример процесса определения нарушения согласно пятому варианту осуществления;
фиг. 17 изображает таблицу, демонстрирующую соотношение между позицией линзы для линзы 32 трансфокации (фокусное расстояние) и максимальным коэффициентом Kmax перемещения плоскости изображения;
фиг. 18 - блок-схема операций, демонстрирующая принцип действия согласно шестому варианту осуществления; и
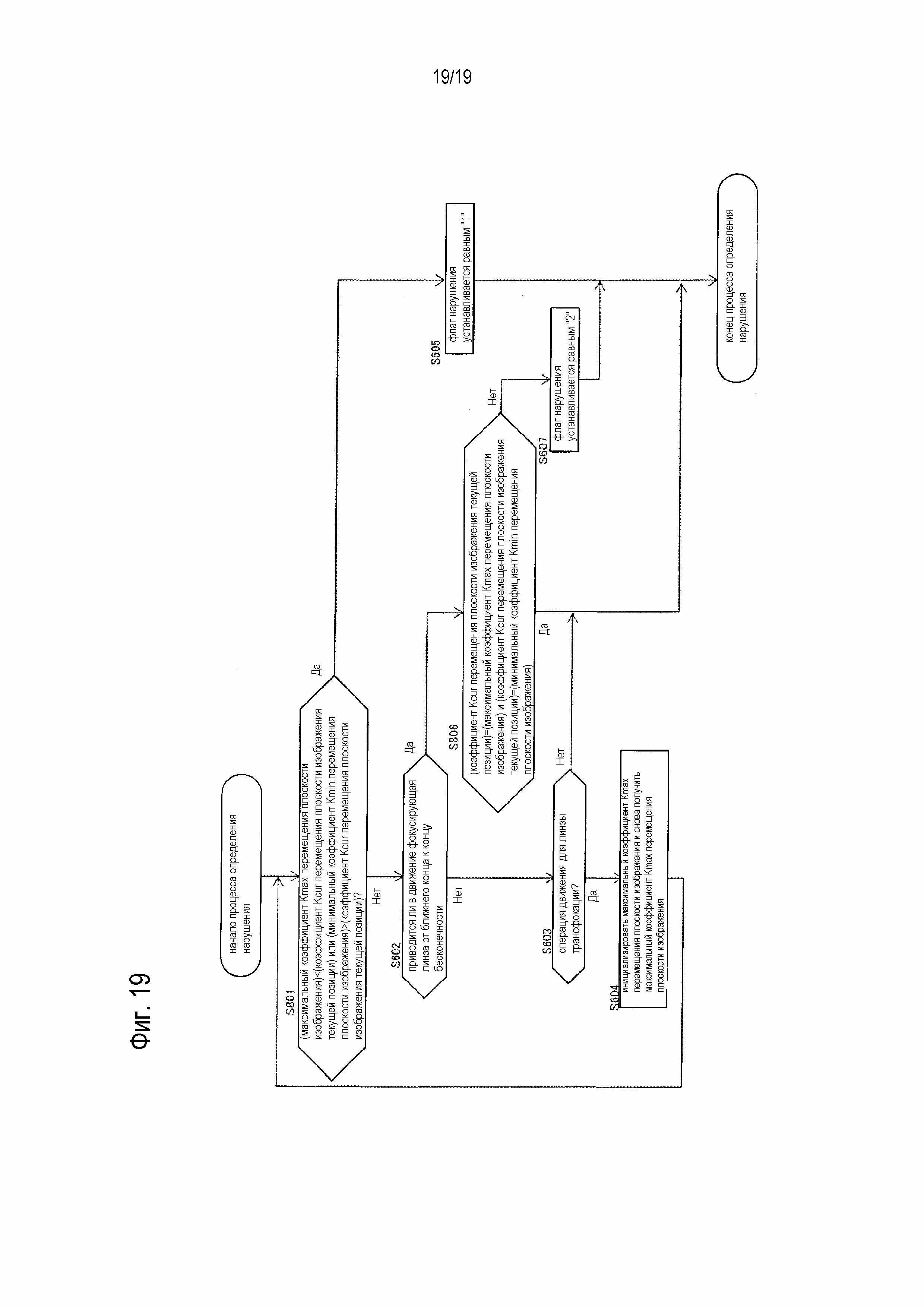
фиг. 19 - блок-схема операций, демонстрирующая процесс определения нарушения согласно шестому варианту осуществления.
Описание предпочтительных вариантов осуществления
[0013] Варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
[0014] Первый вариант осуществления
На фиг. 1 показан вид основной конфигурации, где изображена цифровая камера 1 согласно настоящему варианту осуществления. Цифровая камера 1 согласно настоящему варианту осуществления (далее именуемая просто "камера 1",) состоит из корпуса 2 камеры и объектива 3, таким образом, что монтажный блок 401 корпуса 2 камеры и монтажный блок 402 объектива 3 соединены друг с другом с возможностью разъединения.
[0015] Объектив 3 является сменным объективом, который может присоединяться к корпусу 2 камеры с возможностью отсоединения. Как показано на фиг. 1, в объективе 3 обеспечена оптическая система формирования изображения, которая включает в себя линзы 31, 32, 33 и 34 и диафрагму 35.
[0016] Линза 33 является фокусирующей линзой, которую можно перемещать в направлении оптической оси L1 таким образом, чтобы можно было регулировать фокусное расстояние оптической системы формирования изображения. Фокусирующая линза 33 обеспечена подвижной вдоль оптической оси L1 объектива 3, и позицию фокусирующей линзы 33 можно регулировать приводным двигателем 331 фокусирующей линзы, обнаруживая ее кодером 332 для фокусирующей линзы.
[0017] Конкретная конфигурация механизма перемещения для фокусирующей линзы 33 вдоль оптической оси L1 не имеет конкретных ограничений. В порядке одного примера, вращающееся кольцо вставлен с возможностью вращения в неподвижное кольцо, прикрепленное к объективу 3. На внутренней окружной поверхности этого вращающегося кольца сформирована винтовая канавка (спиральная канавка). Конец оправы линзы, к которому прикреплена фокусирующая линза 33, входит в зацепление с винтовой канавкой. Приводной двигатель 331 фокусирующей линзы используется для вращения вращающегося кольца, благодаря чему, фокусирующая линза 33, прикрепленная к оправе линзы, перемещается прямолинейно вдоль оптической оси L1.
[0018] Как описано выше, путем вращения вращающегося кольца относительно объектива 3, фокусирующая линза 33, прикрепленная к оправе линзы, перемещается прямолинейно в направлении оптической оси L1. В объективе 3 обеспечен приводной двигатель 331 фокусирующей линзы в качестве источника движущей силой для вышеописанного перемещения. Приводной двигатель 331 фокусирующей линзы и вращающееся кольцо связаны, например, передачей, содержащей множество шестерен. Если ведущий вал приводного двигателя 331 фокусирующей линзы приводится в движение для вращения в любом направлении, то эта движущая сила будет передаваться вращающемуся кольцу с заранее определенным передаточным числом для приведения его в движение в любом направлении, таким образом, перемещая фокусирующую линзу 33, прикрепленную к оправе линзы, прямолинейно в определенном направлении вдоль оптической оси L1. Если же ведущий вал приводного двигателя 331 фокусирующей линзы приводится в движение для вращения в противоположном направлении, то шестерни передачи также вращаются в противоположных направлениях, и фокусирующая линза 33 будет двигаться прямолинейно в противоположном направлении вдоль оптической оси L1.
[0019] Позиция фокусирующей линзы 33 обнаруживается кодером 332 для фокусирующей линзы. Как описано выше, позиция в направлении оптической оси L1 фокусирующей линзы 33 коррелирует с углом поворота вращающегося кольца, что позволяет определять ее путем обнаружения относительного угла поворота вращающегося кольца, например, относительно объектива 3.
[0020] В качестве кодера 332 для фокусирующей линзы в настоящем варианте осуществления, можно использовать тот, который обнаруживает вращение вращающегося диска, связанного с вращательным приводом вращающегося кольца фотодатчиком, например, фотопрерывателем для вывода импульсного сигнала, соответствующего скорости вращения, или тот, который приводит рисунок кодера на поверхности гибкой печатной платы, предусмотренной на любом из неподвижного кольца и вращающегося кольца в контакт со щеточным контактом, который обеспечен на другом, и обнаруживает изменение позиции контакта, соответствующее величине перемещения вращающегося кольца (либо в направлении вращения, либо в направлении оптической оси) с помощью схемы обнаружения и т.д.
[0021] Фокусирующую линзу 33 можно перемещать путем вращения вышеописанного вращающегося кольца от конца на стороне корпуса камеры (именуемой также "ближним концом") к концу на стороне объекта (именуемой также "концом бесконечности") в направлении оптической оси L1. Кодер 332 для фокусирующей линзы обнаруживает текущую позицию фокусирующей линзы 33 и выводит информацию текущей позиции. Блок 36 управления объектива осуществляет управление для передачи информации текущей позиции на блок 21 управления камеры. Блок 21 управления камеры использует информацию текущей позиции для вычисления конечной позиции движения фокусирующей линзы 33, скорости движения для фокусирующей линзы 33 или скорости перемещения плоскости изображения (далее именуемую "информацией движения"). Блок 21 управления камеры осуществляет управление для передачи информации движения на блок 36 управления объектива. На основании информации движения, блок 36 управления объектива осуществляет управление приводом для приводного двигателя 331 фокусирующей линзы.
[0022] С другой стороны, линза 32 является линзой трансфокации, которую можно перемещать в направлении оптической оси L1, таким образом, чтобы можно было регулировать увеличение при формировании изображения оптической системы формирования изображения. Аналогично случаю вышеописанной фокусирующей линзы 33, позицию линзы 32 трансфокации можно регулировать приводным двигателем 321 линзы трансфокации, обнаруживая ее кодером 322 для линзы трансфокации. Позицию линзы 32 трансфокации можно регулировать, оперируя кнопкой трансфокации, предусмотренной на операционном блоке 28, или оперируя кольцом трансфокации (не показан), предусмотренным на объективе 3. Механизм перемещения для линзы 32 трансфокации вдоль оптической оси L1 может быть идентичен вышеописанному механизму для фокусирующей линзы 33. Конфигурации кодера 322 для линзы трансфокации и приводного двигателя 321 линзы трансфокации, также могут быть такими же, как для кодера 332 для фокусирующей линзы и приводного двигателя 331 фокусирующей линзы.
[0023] Диафрагма 35 выполнена так, что размер диафрагмы, центрированный по оптической оси L1, можно регулировать для ограничения величины световых пучков, которые проходят через вышеописанную оптическую систему формирования изображения и достигают устройства 22 формирования изображения и для регулировки величины размывания. Размер диафрагмы 35 регулируется подходящим размером диафрагмы, вычисленным в режиме автоматической экспозиции, который отправляется от блока 21 управления камеры, например, через блок 36 управления объектива. Эта регулировка также может осуществляться размером диафрагмы, установленным вручную с использованием операционного блока 28, предусмотренного на корпусе 2 камеры, вводимым от блока 21 управления камеры на блок 36 управления объектива. Размер диафрагмы для диафрагмы 35 обнаруживается датчиком диафрагмы, не показан, и блок 36 управления объектива распознает текущий размер диафрагмы.
[0024] Память 37 объектива обеспечен для сохранения коэффициента K перемещения плоскости изображения. Используемый здесь коэффициент K перемещения плоскости изображения представляет собой значение, который представляет отношение соответствия между величиной движения фокусирующей линзы 33 и величиной перемещения плоскости изображения, и может представлять собой отношение, задаваемое, например, величиной движения фокусирующей линзы 33 и величиной перемещения плоскости изображения. Согласно настоящему варианту осуществления, коэффициент перемещения плоскости изображения можно получить с использованием нижеприведенного выражения (1), например, и в этом случае с увеличением коэффициента K перемещения плоскости изображения, величина перемещения плоскости изображения вследствие приведения в движение фокусирующей линзы 33 также возрастает.
(коэффициент K перемещения плоскости изображения)=(величина перемещения плоскости изображения)/(величина движения фокусирующей линзы 33) …(1)
В камере 1 согласно настоящему варианту осуществления, даже при одинаковой величине движения фокусирующей линзы 33, разная позиция линзы для фокусирующей линзы 33 дает разную величину перемещения плоскости изображения. Аналогичным образом, даже при одинаковой величине движения фокусирующей линзы 33, разная позиция линзы для линзы 32 трансфокации дает разную величину перемещения плоскости изображения. Таким образом, коэффициент перемещения плоскости изображения изменяется в зависимости от позиции линзы на оптической оси фокусирующей линзы 33, а также от позиции линзы на оптической оси линзы 32 трансфокации, и блок 36 управления объектива согласно настоящему варианту осуществления, таким образом, действует для сохранения коэффициента K перемещения плоскости изображения для каждой позиции линзы для фокусирующей линзы 33 и для каждой позиции линзы для линзы 32 трансфокации.
[0025] Фиг. 6 изображает таблицу, которая хранится в памяти 37 объектива и демонстрирует соотношение между позицией линзы для линзы 32 трансфокации (фокусным расстоянием) и позицией линзы для фокусирующей линзы 33 (расстоянием формирования изображения), и коэффициентом K перемещения плоскости изображения. Таблица, изображенная на фиг. 6, выполнена так, что размах движения линзы 32 трансфокации делится на девять сегментов от "f1" до "f9" в указанном порядке от ближнего конца к концу бесконечности, тогда как размах движения фокусирующей линзы 33 также делится на девять сегментов от "D1" до "D9" в указанном порядке от ближнего конца к концу бесконечности, чтобы, таким образом сохранить коэффициент K перемещения плоскости изображения, соответствующий каждой позиции линзы. Например, когда позиция линзы для линзы 32 трансфокации (фокусное расстояние) находится в "f1", и позиция линзы для фокусирующей линзы 33 (расстояние формирования изображения) находится в "D1", коэффициент K перемещения плоскости изображения равен "K11". В вышеприведенном примере, таблица, изображенная на фиг. 6, выполнена так, что размах движения каждой линзы делится на девять сегментов, но кратность разделения не имеет конкретных ограничений и может быть установлена произвольно.
[0026] Теперь, согласно фиг. 6, опишем максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения.
Используемый здесь максимальный коэффициент Kmax перемещения плоскости изображения является значением, которое соответствует максимальному значению коэффициента K перемещения плоскости изображения. Предпочтительно, чтобы максимальный коэффициент Kmax перемещения плоскости изображения изменялся в зависимости от текущей позиции линзы для линзы 32 трансфокации. Также предпочтительно, чтобы, когда текущая позиция линзы для линзы 32 трансфокации не изменяется, максимальный коэффициент Kmax перемещения плоскости изображения является постоянным значением (фиксированным значением) даже если текущая позиция линзы для фокусирующей линзы 33 изменяется. Таким образом, предпочтительно, чтобы максимальный коэффициент Kmax перемещения плоскости изображения имел фиксированное значение (постоянное значение), которое определяется в зависимости от позиции линзы для линзы 32 трансфокации (фокусного расстояния) и который не зависит от позиции линзы для фокусирующей линзы 33 (расстояния формирования изображения).
[0027] Например, на фиг. 6, каждый из "K11", "K21", "K31", "K41", "K52", "K62", "K72", "K82" и "K91" в серых ячейках является максимальным коэффициентом Kmax перемещения плоскости изображения, который представляет максимальное значение среди коэффициентов K перемещения плоскости изображения в каждой позиции линзы для линзы 32 трансфокации (для каждого фокусного расстояния). В частности, при условии, что позиция линзы для линзы 32 трансфокации (фокусное расстояние) находится в "f1", "K11" в качестве коэффициента K перемещения плоскости изображения, когда позиция линзы для фокусирующей линзы 33 (расстояние формирования изображения) находится в "D1" из позиций от "D1" до "D9" является максимальным коэффициентом Kmax перемещения плоскости изображения, который представляет максимальное значение. Таким образом, "K11" в качестве коэффициента K перемещения плоскости изображения, когда позиция линзы для фокусирующей линзы 33 (расстояние формирования изображения) находится в "D1" представляет максимальное значение среди "K11"-"K19" которые являются коэффициентами K перемещения плоскости изображения, когда соответствующие позиции линзы (расстояния формирования изображения) находятся в "D1"-"D9". Аналогичным образом, при условии, что позиция линзы для линзы 32 трансфокации (фокусное расстояние) находится в "f2", "K21" в качестве коэффициента K перемещения плоскости изображения, когда позиция линзы для фокусирующей линзы 33 (расстояние формирования изображения) находится в "D1", также представляет максимальное значение среди "K21"-"K29", которые являются коэффициентами K перемещения плоскости изображения, когда соответствующие позиции линзы (расстояния формирования изображения) находятся в "D1"-"D9". Таким образом, "K21" является максимальным коэффициентом Kmax перемещения плоскости изображения. То же самое справедливо для случая, когда позиция линзы для линзы 32 трансфокации (фокусное расстояние) находится в каждом из "f3"-"f9", и в этом случае каждый из "K31", "K41", "K52", "K62", "K72", "K82" и "K91" в серых ячейках является максимальным коэффициентом Kmax перемещения плоскости изображения.
[0028] Аналогичным образом, используемый здесь минимальный коэффициент Kmin перемещения плоскости изображения является значением, которое соответствует минимальному значению коэффициента K перемещения плоскости изображения. Предпочтительно, чтобы минимальный коэффициент Kmin перемещения плоскости изображения изменялся в зависимости от текущей позиции линзы для линзы 32 трансфокации. Также предпочтительно, чтобы, когда текущая позиция линзы для линзы 32 трансфокации не изменяется, минимальный коэффициент Kmin перемещения плоскости изображения имел постоянное значение (фиксированное значение), даже если текущая позиция линзы для фокусирующей линзы 33 изменяется. Например, на фиг. 6, каждый из "K19", "K29", "K39", "K49", "K59", "K69", "K79", "K89" и "K99" в заштрихованных ячейках является минимальным коэффициентом Kmin перемещения плоскости изображения, который представляет минимальное значение среди коэффициентов K перемещения плоскости изображения в каждой позиции линзы для линзы 32 трансфокации (для каждого фокусного расстояния).
[0029] Таким образом, как показано на фиг. 6, в памяти 37 объектива хранятся: коэффициенты K перемещения плоскости изображения, которые соответствуют соответствующим позициям линзы для линзы 32 трансфокации (фокусным расстояниям) и соответствующим позициям линзы для фокусирующей линзы 33 (расстояниям формирования изображения); максимальный коэффициент Kmax перемещения плоскости изображения, который представляет максимальное значение среди коэффициентов K перемещения плоскости изображения для каждой позиции линзы для линзы 32 трансфокации (фокусного расстояния); и минимальный коэффициент Kmin перемещения плоскости изображения, который представляет минимальное значение среди коэффициентов K перемещения плоскости изображения для каждой позиции линзы для линзы 32 трансфокации (фокусного расстояния).
[0030] Электрические контакты 403, предусмотренные на монтажном блоке 401 корпуса 2 камеры и электрические контакты 404 предусмотренный на монтажном блоке 402 объектива 3 соединены друг с другом таким образом, чтобы электрически соединять блок 36 управления объектива с блоком 21 управления камеры через приемопередающий блок 38 объектива и приемопередающий блок 29 камеры.
Согласно настоящему варианту осуществления, блок 21 управления камеры и блок 36 управления объектива осуществляют стационарную связь между собой и также осуществляют нестационарную связь, как будет описано ниже. При осуществлении стационарной связи, блок 21 управления камеры неоднократно передает с заранее определенным интервалом (например, интервалом от десятков миллисекунд до сотен миллисекунд) первый сигнал запроса, который запрашивает информацию объектива, на блок 36 управления объектива через приемопередающий блок 29 камеры и приемопередающий блок 38 объектива. Будучи инициирована, стационарная связь, предпочтительно, может продолжаться с заранее определенным интервалом до отключения питания.
[0031] Кроме того, блок 21 управления камеры передает команды, например, для приведения в движение линзы 32 трансфокации, приведения в движение фокусирующей линзы 33 и регулировки размера диафрагмы для диафрагмы 35, на блок 36 управления объектива.
Блок 36 управления объектива, при осуществлении стационарной связи, принимает команды, например, для регулировки размера диафрагмы, и осуществляет управление на основании принятых команд. Блок 36 управления объектива, в случае приема первого сигнала запроса при осуществлении стационарной связи, неоднократно передает информацию объектива на блок 21 управления камеры. Используемые здесь примеры информации объектива включают в себя информацию в отношении позиции линзы 32 трансфокации, позиции фокусирующей линзы 33 и размера диафрагмы для диафрагмы 35, и т.д. и коэффициент Kcur перемещения плоскости изображения текущей позиции. Используемый здесь коэффициент Kcur перемещения плоскости изображения текущей позиции является коэффициентом K перемещения плоскости изображения, который соответствует текущей позиции линзы трансфокации (фокусному расстоянию) и текущей позиции фокусирующей линзы (расстоянию формирования изображения).
Согласно настоящему варианту осуществления, блок 36 управления объектива обращается к таблице, которая хранится в памяти 37 объектива и представляет соотношение между позициями линзы (позицией линза трансфокации и позицией фокусирующей линзы) и коэффициентом K перемещения плоскости изображения, чтобы, таким образом получить коэффициент Kcur перемещения плоскости изображения текущей позиции, который соответствует текущей позиции линзы для линзы 32 трансфокации и текущей позиции линзы для фокусирующей линзы 33.
[0032] При осуществлении нестационарной связи, которая отличается от вышеупомянутой стационарной связи, блок 21 управления камеры передает второй сигнал запроса для запрашивания передачи максимального коэффициента Kmax перемещения плоскости изображения и минимального коэффициента Kmin перемещения плоскости изображения. Предпочтительно, чтобы вышеупомянутая нестационарная связь была прерываемой связью к стационарной связи. Блок 36 управления объектива, в случае приема второго сигнала запроса при осуществлении нестационарной связи, передает максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения на блок 21 управления камеры.
Максимальный коэффициент Kmax перемещения плоскости изображения передается, когда второй сигнал запроса принимается при осуществлении нестационарной связи, и отличается от коэффициента Kcur перемещения плоскости изображения текущей позиции, который передается, когда первый сигнал запроса принимается при осуществлении стационарной связи.
Согласно фиг. 6, при условии, что позиция линзы для линзы 32 трансфокации (фокусное расстояние) находится в "f1", и позиция линзы для фокусирующей линзы 33 (расстояние формирования изображения) находится в "D4", например, блок 36 управления объектива передает "K14" в качестве коэффициента Kcur перемещения плоскости изображения текущей позиции на блок 21 управления камеры в случае приема первого сигнала запроса от блока 21 управления камеры при осуществлении стационарной связи, и передает "K11" в качестве максимального коэффициента Kmax перемещения плоскости изображения и "K19" в качестве минимального коэффициента Kmin перемещения плоскости изображения на блок 21 управления камеры в случае приема второго сигнала запроса от блока 21 управления камеры при осуществлении нестационарной связи.
[0033] С другой стороны, в корпусе 2 камеры, устройство 22 формирования изображения, которое принимает световые пучки L1 из вышеописанной оптической системы формирования изображения, обеспечено в заранее определенной фокальной плоскости оптической системы формирования изображения. Перед ней, обеспечен затвор 23. Устройство 22 формирования изображения состоит из такого устройства, как ПЗС и КМОП, которое преобразует принятый оптический сигнал в электрический сигнал, который поступает на блок 21 управления камеры. Информация захваченного изображения, поступающая на блок 21 управления камеры, затем передается на схему 25 возбуждения жидкого кристалла и отображается на электронном видоискателе (EVF) 26 оптической системы наблюдения. Когда спусковая кнопка (не показана), предусмотренная на операционном блоке 28, полностью нажата, информация захваченного изображения записывается на носителе записи, то есть, в памяти 24 камеры. Память 24 камеры может представлять собой, либо память типа сменной карты, либо память встроенного типа. Детали конструкции устройства 22 формирования изображения будут описаны ниже.
[0034] Оптическая система наблюдения обеспечена в корпусе 2 камеры, для наблюдения изображения, захваченного устройством 22 формирования изображения. Оптическая система наблюдения в настоящем варианте осуществления содержит: электронный видоискатель (EVF) 26, содержащий элемент жидкокристаллического дисплея; схему 25 возбуждения жидкого кристалла, который управляет электронным видоискателем 26; и линзу 27 окуляра. Схема 25 возбуждения жидкого кристалла считывает информацию захваченного изображения, которое было захвачено устройством 22 формирования изображения и отправлено на блок 21 управления камеры, и использует ее как основание для управления электронным видоискателем 26. Это позволяет фотографу наблюдать захваченное в данный момент изображение через линзу 27 окуляра. Вместо вышеописанной оптической системы наблюдения, использующей оптическую ось L2, или помимо нее, можно также обеспечить жидкокристаллический дисплей на задней поверхности корпуса 2 камеры, и т.д. и отображать захваченное изображение на этом жидкокристаллическом дисплее.
[0035] Блок 21 управления камеры обеспечен в корпусе 2 камеры. Блок 21 управления камеры, который электрически соединен с блоком 36 управления объектива через приемопередающий блок 38 объектива и приемопередающий блок 29 камеры, передает первый сигнал запроса при осуществлении стационарной связи на блок 36 управления объектива с интервалом от десятков миллисекунд до сотен миллисекунд, как описано выше, и принимает информацию объектива, например, коэффициент Kcur перемещения плоскости изображения текущей позиции. Кроме того, блок 21 управления камеры передает команды для осуществления регулировки значения диафрагмы и т.д. на блок 36 управления объектива.
[0036] Кроме того, блок 21 управления камеры, как описано выше, считывает пиксельный выход из устройства 22 формирования изображения, и обрабатывает считанный пиксельный выход при необходимости посредством заранее определенного информационного процесса для генерации информации изображения, которая выводится на схему 25 возбуждения жидкого кристалла электронного видоискателя 26 и/или в память 24. Кроме того, блок 21 управления камеры управляет камерой 1 в целом, например, осуществляет коррекцию информации изображения из устройства 22 формирования изображения и обнаружение состояния регулировки фокуса объектива 3 и состояния регулировки диафрагмы и т.д.
[0037] Кроме того, блок 21 управления камеры, помимо вышеперечисленного, использует пиксельные данные, считанные из устройства 22 формирования изображения, как основание для обнаружения состояния регулировки фокуса оптической системы формирования изображения системой обнаружения разности фаз и обнаружения состояния регулировки фокуса оптической системы формирования изображения системой обнаружения контрастности. Конкретный способ обнаружения состояния регулировки фокуса будет описан ниже.
[0038] Операционный блок 28 включает в себя кнопку спуска затвора и входные переключатели, например, пусковой переключатель формирования движущегося изображения, позволяющий фотографу устанавливать различные режимы работы камеры 1 и предназначенный для обеспечения возможности переключения между режимом автофокусировки и режимом ручной фокусировки и переключения между режимом формирования неподвижного изображения и режимом формирования движущегося изображения. Различные режимы, установленные с помощью операционного блока 28, отправляются на блок 21 управления камеры, который управляет работой камеры 1 в целом. Кнопка спуска затвора включает в себя первый переключатель SW1, который включается полунажатием кнопки, и второй переключатель SW2, который включается полным нажатием кнопки.
[0039] Перейдем к объяснению устройства 22 формирования изображения согласно настоящему варианту осуществления.
[0040] На фиг. 2 показан планарный вид спереди, где изображена плоскость формирования изображения устройства 22 формирования изображения, и на фиг. 3 показан планарный вид спереди, где изображена в увеличенном виде область III фиг. 2 для схематической демонстрации компоновки пикселей 222a и 222b обнаружения фокуса.
[0041] Устройство 22 формирования изображения настоящего варианта осуществления, как показано на фиг. 3, выполнено так, что множество пикселей 221 формирования изображения размещено в двух измерениях в плоскости, образованной плоскостью формирования изображения, т.е. зеленые пиксели G, имеющие цветовые фильтры, которые пропускают диапазон длин волны зеленого цвета, красные пиксели R, имеющие цветовые фильтры, которые пропускают диапазон длин волны красного цвета, и синие пиксели B, имеющие цветовые фильтры, которые пропускают диапазон длин волны синего цвета, размещены в так называемой "байеровской компоновке". Таким образом, в каждой группе 223 из четырех соседствующих пикселей (плотно упакованной квадратной решетке), два зеленых пикселя размещены на одной диагонали, тогда как один красный пиксель и один синий пиксель размещены на другой диагонали. Путем использования таких групп 223 пикселей, размещенных в байеровской компоновке в виде блоков, и размещения с повторением таких групп 223 пикселей на плоскости формирования изображения устройства 22 формирования изображения в двух измерениях, можно сформировать устройство 22 формирования изображения.
[0042] Матрица в единичной группе 223 пикселей также может представлять собой, например, плотно упакованную гексагональную решетку вместо проиллюстрированной плотно упакованной квадратной решетки. Конфигурация и матрица цветовых фильтров не ограничиваются вышеприведенным примером. Можно также использовать матрицу дополнительных цветовых фильтров (зеленый: G, желтый: Ye, малиновый: Mg и голубой: Cy).
[0043] На фиг. 4(A) показан планарный вид спереди, где изображен в увеличенном виде один из пикселей 221 формирования изображения, и фиг. 4(D) показан его вид в разрезе. Один пиксель 221 формирования изображения состоит из микролинзы 2211, блока 2212 фотоэлектрического преобразования и не показанного цветового фильтра. Как показано в виде в разрезе на фиг. 4(D), блок 2212 фотоэлектрического преобразования встроен в поверхность монтажной платы 2213 для полупроводниковых приборов устройства 22 формирования изображения, при этом микролинза 2211 сформирована на его поверхности. Блок 2212 фотоэлектрического преобразования приспособлен для использования микролинзы 2211 для приема световых пучков формирования изображения, проходящих через выходной зрачок (например, F1.0) оптической системы формирования изображения, и, таким образом, принимает световые пучки формирования изображения.
[0044] Кроме того, в центре плоскости формирования изображения устройства 22 формирования изображения и в левой и правой симметричных позициях от центра, то есть в трех местах, обеспечены строки 22a, 22b и 22c пикселей обнаружения фокуса, в каждом из которых пиксели 222a и 222b обнаружения фокуса размещены вместо вышеописанных пикселей 221 формирования изображения. Как показано на фиг. 3, одна строка пикселей обнаружения фокуса выполнена так, что множество пикселей 222a и 222b обнаружения фокуса размещены рядом друг с другом попеременно в горизонтальной строке (22a, 22b, 22c). В настоящем варианте осуществления, пиксели 222a и 222b обнаружения фокуса плотно размещены без зазоров в позициях зеленых пикселей G и синих пикселей B из пикселей 221 формирования изображения, размещенных в байеровской компоновке.
[0045] Позиции строк 22a-22c пикселей обнаружения фокуса, показанные на фиг. 2, не ограничиваются проиллюстрированными позициями. Строки могут располагаться в любом отдельно взятом месте или в двух местах, или в четырех или более местах. Кроме того, в ходе фактического обнаружения фокуса, фотограф также может вручную оперировать операционным блоком 28 для выбора нужной строки пикселей обнаружения фокуса в качестве области обнаружения фокуса из множества размещенных строк 22a-22c пикселей обнаружения фокуса.
[0046] На фиг. 4(B) показан планарный вид спереди, где изображен один из пикселей 222a обнаружения фокуса в увеличенном виде, и на фиг. 4(E) показан вид в разрезе пикселя 222a обнаружения фокуса. На Фиг. 4(C) показан планарный вид спереди, где изображен один из пикселей 222b обнаружения фокуса в увеличенном виде, и на фиг. 4(F) показан вид в разрезе пикселя 222b обнаружения фокуса. Пиксель 222a обнаружения фокуса, как показано на фиг. 4(B), состоит из микролинзы 2221a и блока 2222a фотоэлектрического преобразования полукруглой формы. Как показано в виде в разрезе на фиг. 4(E), блок 2222a фотоэлектрического преобразования встроен в поверхность монтажной платы 2213 для полупроводниковых приборов устройства 22 формирования изображения, при этом микролинза 2221a сформирована на его поверхности. Пиксель 222b обнаружения фокуса, как показано на фиг. 4(C), состоит из микролинзы 2221b и блока 2222b фотоэлектрического преобразования. Как показано в виде в разрезе на фиг. 4(F), блок 2222b фотоэлектрического преобразования встроен в поверхность монтажной платы 2213 для полупроводниковых приборов устройства 22 формирования изображения, при этом микролинза 2221b сформирована на его поверхности. Эти пиксели 222a и 222b обнаружения фокуса, как показано на фиг. 3, размещены рядом друг с другом в горизонтальной строке, образуя, таким образом, строки 22a-22c пикселей обнаружения фокуса, показанные на фиг. 2.
[0047] Блоки 2222a и 2222b фотоэлектрического преобразования пикселей 222a и 222b обнаружения фокуса приспособлены для использования микролинз 2221a и 2221b для приема световых пучков, проходящих через заранее определенную область (например, F2.8) выходного зрачка оптической системы формирования изображения. Пиксели 222a и 222b обнаружения фокуса не снабжены цветовыми фильтрами, поэтому их спектральные характеристики являются комбинациями спектральных характеристик фотодиодов, которые осуществляют фотоэлектрическое преобразование, и спектральных характеристик инфракрасных режекторных фильтров, которые не показаны. Однако следует заметить, что каждый пиксель также может быть выполнен с возможностью содержать один из тех же цветовых фильтров, которые входят в состав пикселей 221 формирования изображения, например, зеленый фильтр.
[0048] Блоки 2222a и 2222b фотоэлектрического преобразования пикселей 222a и 222b обнаружения фокуса, показанные на фиг. 4(B) и фиг. 4(C) выполнены в форме полукруга, но формы блоков 2222a и 2222b фотоэлектрического преобразования не ограничиваются этим. Также можно использовать другие формы, например, овальные формы, прямоугольные формы и многоугольные формы.
[0049] Нижеследующее описание посвящено так называемой "системе обнаружения разности фаз", которая обнаруживает состояние регулировки фокуса оптической системы формирования изображения на основании пиксельных выходов вышеописанных пикселей 222a и 222b обнаружения фокуса.
[0050] На фиг. 5 показан вид в разрезе по линии V-V на фиг. 3 и показано, что пиксели 222a-1, 222b-1, 222a-2 и 222b-2 обнаружения фокуса, размещенные вблизи оптической оси L1 формирования изображения и соседствующие друг с другом, принимают световые пучки AB1-1, AB2-1, AB1-2 и AB2-2, соответственно, которые излучаются из зрачков 351 и 352 измерения расстояния выходного зрачка 350. На фиг. 5, из множества пикселей 222a и 222b обнаружения фокуса, в порядке примеров показаны только расположенные вблизи оптической оси L формирования изображения, но другие пиксели обнаружения фокуса, отличные от показанных на фиг. 5, аналогично выполнены с возможностью приема соответствующих световых пучков, излучаемых из пары зрачков 351 и 352 измерения расстояния.
[0051] Используемый здесь термин "выходной зрачок 350" означает изображение, установленное в позиции на расстоянии D перед микролинзами 2221a и 2221b пикселей 222a и 222b обнаружения фокуса размещенный на заранее определенной фокальной плоскости оптической системы формирования изображения. Расстояние D это значение, однозначно определяемое в соответствии с кривизной и показателем преломления микролинзы и расстоянием между микролинзой и блоком фотоэлектрического преобразования и т.д. Это расстояние D именуется "расстоянием до зрачка измерения расстояния". Используемые здесь "зрачки 351 и 352 измерения расстояния" это изображения блоков 2222a и 2222b фотоэлектрического преобразования, которые проецируются, соответственно, микролинзами 2221a и 2221b пикселей 222a и 222b обнаружения фокуса.
[0052] На фиг. 5, направление компоновки пикселей 222a-1, 222b-1, 222a-2 и 222b-2 обнаружения фокуса совпадает с направлением компоновки пары зрачков 351 и 352 измерения расстояния.
[0053] Как показано на фиг. 5, микролинзы 2221a-1, 2221b-1, 2221a-2 и 2221b-2 пикселей 222a-1, 222b-1, 222a-2 и 222b-2 обнаружения фокуса размещены вблизи заранее определенной фокальной плоскостью оптической системы формирования изображения. Когда формы блоков 2222a-1, 2222b-1, 2222a-2 и 2222b-2 фотоэлектрического преобразования, размещенных позади микролинз 2221a-1, 2221b-1, 2221a-2 и 2221b-2, проецируются на выходной зрачок 350, который отделен от микролинз 2221a-1, 2221b-1, 2221a-2 и 2221b-2 в точности расстоянием D измерения расстояния, проецируемые формы образуют зрачки 351 и 352 измерения расстояния.
[0054] Другими словами, относительные позиционные соотношения микролинз и блоков фотоэлектрического преобразования в пикселях обнаружения фокуса заданы так, что проецируемые формы (зрачки 351 и 352 измерения расстояния) блоков фотоэлектрического преобразования пикселей обнаружения фокуса совпадают на выходном зрачке 350 на расстоянии D измерения расстояния, и, таким образом, определяются направления проекции блоков фотоэлектрического преобразования в пикселях обнаружения фокуса.
[0055] Как показано на фиг. 5, блок 2222a-1 фотоэлектрического преобразования пикселя 222a-1 обнаружения фокуса выводит сигнал, соответствующий интенсивности изображения, сформированного на микролинзе 2221a-1 световым пучком AB1-1, который проходит через зрачок 351 измерения расстояния и направляется к микролинзе 2221a-1. Аналогично, блок 2222a-2 фотоэлектрического преобразования пикселя 222a-2 обнаружения фокуса выводит сигнал, соответствующий интенсивности изображения, сформированного на микролинзе 2221a-2 световым пучком AB1-2, который проходит через зрачок 351 измерения расстояния и направляется к микролинзе 2221a-2.
[0056] Блок 2222b-1 фотоэлектрического преобразования пикселя 222b-1 обнаружения фокуса выводит сигнал, соответствующий интенсивности изображения, сформированного на микролинзе 2221b-1 световым пучком AB2-1, который проходит через зрачок измерения расстояния 352 и направляется к микролинзе 2221b-1. Аналогично, блок 2222b-2 фотоэлектрического преобразования пикселя 222b-2 обнаружения фокуса выводит сигнал, соответствующий интенсивности изображения, сформированного на микролинзе 2221b-2 световым пучком AB2-2, который проходит через зрачок измерения расстояния 352 и направляется к микролинзе 2221b-2.
[0057] Размещение вышеописанных двух типов множественных пикселей 222a и 222b обнаружения фокуса на прямой, как показано на фиг. 3 и группирование выходных сигналов блоков 2222a и 2222b фотоэлектрического преобразования пикселей 222a и 222b обнаружения фокуса в соответствующие группы выходных сигналов, соответствующие зрачкам 351 и 352 измерения расстояния, позволяет получить данные, относящиеся к распределениям интенсивности пары изображений, которые пучки обнаружения фокуса, проходящие через зрачки 351 и 352 измерения расстояния, формируют на строках пикселей обнаружения фокуса. Эти данные распределения интенсивности можно обрабатывать посредством операции обнаружения отклонения изображения, например, операции корреляции или обнаружения разности фаз, таким образом, обнаруживая величину отклонения изображения посредством так называемой системы обнаружения разности фаз.
[0058] Кроме того, обрабатывая полученную величину отклонения изображения с использованием операции преобразования в зависимости от интервала между центрами тяжести пары зрачков измерения расстояния, можно найти отклонение текущей фокальной плоскости относительно заранее определенной фокальной плоскости (фокальной плоскости в области обнаружения фокуса, соответствующей позиции микролинзовой матрицы на заранее определенной фокальной плоскости), то есть величину расфокусировки.
[0059] Вычисление величины отклонения изображения с использованием системы обнаружения разности фаз и вычисление величины расфокусировки на ее основе осуществляются блоком 21 управления камеры.
[0060] Кроме того, блок 21 управления камеры считывает выходные сигналы пикселей 221 формирования изображения устройства 22 формирования изображения и использует считанные пиксельные выходы как основу для вычисления оценочного значения фокуса. Это оценочное значение фокуса можно получить, например, выделяя высокочастотные компоненты изображения, выведенного из пикселей 221 формирования изображения устройства 22 формирования изображения с использованием высокочастотного фильтра. В альтернативном варианте осуществления, их можно получить с использованием двух высокочастотных фильтров с разными частотами среза для выделения высокочастотных компонентов.
[0061] Затем блок 21 управления камеры отправляет возбуждающий сигнал на блок 36 управления объектива для приведения в движение фокусирующей линзы 33 с заранее определенным интервалом (расстоянием) выборки, таким образом, получая оценочные значения фокуса в разных позициях и находя позицию фокусирующей линзы 33, в которой оценочное значение фокуса максимально, как сфокусированную позицию, т.е. осуществляя обнаружение фокуса с помощью системы обнаружения контрастности. Эту сфокусированную позицию можно получить, например, вычисляя оценочные значения фокуса одновременно с приведением в движение фокусирующей линзы 33, путем интерполяции или другой надлежащей операции с использованием этих оценочных значений фокуса, которые принимают значение, которое возрастает вдвое и после этого падает вдвое.
[0062] Теперь опишем пример работы камеры 1 согласно настоящему варианту осуществления согласно фиг. 7. На Фиг. 7 показана блок-схема операций, демонстрирующая пример работы камеры 1 согласно настоящему варианту осуществления. Следующая операция инициируется включением питания камеры 1.
[0063] Сначала, на этапе S101, блок 21 управления камеры инициирует вычисление величины расфокусировки с использованием системы обнаружения разности фаз. Согласно настоящему варианту осуществления, процесс вычисления величины расфокусировки с использованием системы обнаружения разности фаз осуществляется следующим образом. Таким образом, блок 21 управления камеры первый считывает пару элементов данных изображения, соответствующую паре изображений из пикселей 222a и 222b обнаружения фокуса, которые составляют каждую из трех строк 22a-22c пикселей обнаружения фокуса устройства 22 формирования изображения. В этом случае, также возможна конфигурация, в которой, когда фотограф вручную выбирает конкретную позицию обнаружения фокуса, считываются только данные из пикселей обнаружения фокуса, соответствующих этой позиции обнаружения фокуса. Затем блок 21 управления камеры использует считанную пару элементов данных изображения как основание для осуществления обработки обнаружения отклонения изображения (корреляционной обработки), и вычисляет величину отклонения изображения в позиции обнаружения фокуса, соответствующей каждой из трех строк 22a-22c пикселей обнаружения фокуса, которая затем преобразуется в величину расфокусировки. Кроме того, блок 21 управления камеры осуществляет оценивание достоверности вычисленной величины расфокусировки. Оценивание достоверности величины расфокусировки можно осуществлять, например, на основании степени совпадения пары элементов данных изображения и/или контрастности и т.д. Такая вычислительная обработка величины расфокусировки с использованием системы обнаружения разности фаз осуществляется неоднократно с заранее определенным интервалом.
[0064] На этапе S102, блок 21 управления камеры инициирует процесс вычисления для оценочного значения фокуса с использованием системы обнаружения контрастности. Согласно настоящему варианту осуществления, процесс вычисления для оценочного значения фокуса осуществляется путем считывания пиксельных выходов из пикселей 221 формирования изображения устройства 22 формирования изображения, выделения высокочастотных компонентов считанных пиксельных выходов с использованием высокочастотного фильтра, и их накопления. Если фотограф вручную выбирает конкретную позицию обнаружения фокуса, возможна также другая конфигурация, в которой пиксельные выходы считываются только из пикселей 221 формирования изображения, соответствующих выбранной позиции обнаружения фокуса, для вычисления оценочного значения фокуса. Процесс вычисления для оценочного значения фокуса осуществляется неоднократно с заранее определенным интервалом.
[0065] Согласно настоящему варианту осуществления, на этапе S101, в моменты времени, когда система обнаружения разности фаз инициирует вычисление величины расфокусировки, или в моменты времени, когда система обнаружения контрастности инициирует процесс вычисления для оценочного значения фокуса, или после их инициирования, инициируется стационарная связь между блоком 21 управления камеры и блоком 36 управления объектива, и процесс осуществляется неоднократно с заранее определенным интервалом, так что блок 36 управления объектива передает на блок 21 управления камеры информацию объектива, которая включает в себя коэффициент Kcur перемещения плоскости изображения текущей позиции, соответствующей текущей позиции линзы для линзы 32 трансфокации и текущей позиции линзы для фокусирующей линзы 33.
[0066] На этапе S103, блок 21 управления камеры производит определение, была ли кнопка спуска затвора, предусмотренная на операционном блоке 28, полунажата (первый переключатель SW1 включен). Если первый переключатель SW1 включен, то процедура переходит к этапу S104, если же первый переключатель SW1 не включен, то процедура ожидает на этапе S103, на котором вычисление величины расфокусировки и вычисление оценочного значения фокуса и дальнейшее получение информации объектива с использованием стационарной связи осуществляются неоднократно, пока не будет включен первый переключатель SW1.
[0067] На этапе S104, блок 21 управления камеры передает второй сигнал запроса при осуществлении нестационарной связи, и блок 36 управления объектива, приняв второй сигнал запроса при осуществлении нестационарной связи от блока 21 управления камеры, обращается к таблице (см. фиг. 6), хранящейся в памяти 37 объектива, для передачи на блок 21 управления камеры максимального коэффициента Kmax перемещения плоскости изображения и минимального коэффициента Kmin перемещения плоскости изображения, которые соответствуют текущей позиции линзы для линзы 32 трансфокации. Таким образом, блок 21 управления камеры принимает максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения.
[0068] На этапе S105, блок 21 управления камеры производит определение, можно ли вычислить величину расфокусировки с использованием системы обнаружения разности фаз. Если величину расфокусировки можно вычислить, то процедура переходит к этапу S111, если же величину расфокусировки нельзя вычислить, то процедура переходит к этапу S106. Заметим, что, согласно настоящему варианту осуществления, даже в случае, когда величину расфокусировки можно вычислить, случаи, когда вычисленная величина расфокусировки имеет низкую достоверность, рассматриваются как случаи, когда величину расфокусировки невозможно вычислить, и процедура должна перейти к этапу S106. Согласно настоящему варианту осуществления, достоверность величины расфокусировки можно определить как низкую в случае низкой контрастности объекта, объект является объектом очень низкой яркости, или объект является, например, объектом очень высокой яркости.
[0069] Вышеописанное определение на этапе S105 производится с использованием результата наиболее недавнего однократного процесса вычисления величины расфокусировки, но альтернативный вариант осуществления может предусматривать, что, если величину расфокусировки последовательно невозможно вычислить, или достоверность величины расфокусировки последовательно низка в заранее определенном количестве наиболее недавних процессов вычисления величины расфокусировки, то делается вывод, что измерение расстояния невозможно, и процедура переходит к этапу S106, если же, по меньшей мере, одну величину расфокусировки можно вычислить в заранее определенном количестве наиболее недавних процессов вычисления величины расфокусировки, то делается вывод, что измерение расстояния возможно, и процедура переходит к этапу S111.
[0070] Если на этапе S105 определена возможность вычисления величины расфокусировки, что позволяет определить возможность измерения расстояния, то процедура переходит к этапу S111, на котором фокусирующее движение осуществляется на основании величины расфокусировки, вычисленного с использованием системы обнаружения разности фаз. В частности, блок 21 управления камеры вычисляет, из величины расфокусировки, вычисленной с использованием системы обнаружения разности фаз, величину движения линзы, которая необходима для приведения в движение фокусирующей линзы 33 в сфокусированную позицию, которая отправляется на приводной двигатель 331 фокусирующей линзы через блок 36 управления объектива. Это позволяет приводному двигателю 331 фокусирующей линзы приводить в движение фокусирующую линзу 33 в сфокусированную позицию на основании величины движения линзы, вычисленной блоком 21 управления камеры.
[0071] Заметим, что, согласно настоящему варианту осуществления, даже когда приводной двигатель 331 фокусирующей линзы приводится в движение для приведения в движение фокусирующей линзы 33 в сфокусированную позицию, блок 21 управления камеры осуществляет неоднократно вычисление величины расфокусировки с использованием системы обнаружения разности фаз, так что в случае вычисления новой величины расфокусировки, блок 21 управления камеры приводит в движение фокусирующую линзу 33 на основании новой величины расфокусировки.
[0072] Затем, на этапе S106, блок 21 управления камеры использует максимальный коэффициент Kmax перемещения плоскости изображения, полученный на этапе S104 для осуществления процесса определения скорости V сканирующего движения, которая является скоростью движения для фокусирующей линзы 33 в операции сканирования. Используемый здесь термин "операция сканирования" означает операцию, в которой блок 21 управления камеры одновременно осуществляет вычисление величины расфокусировки с использованием системы обнаружения разности фаз и вычисляет оценочное значение фокуса с использованием системы обнаружения контрастности с заранее определенным интервалом одновременно с приведением в движение фокусирующей линзы 33 с использованием приводного двигателя 331 фокусирующей линзы на скорости V сканирующего движения, определенной на этапе S106, чтобы, таким образом, одновременно и параллельно осуществлять обнаружение сфокусированной позиции с использованием системы обнаружения разности фаз и обнаружение сфокусированной позиции с использованием системы обнаружения контрастности с заранее определенным интервалом.
[0073] В этой операции сканирования, когда обнаружение сфокусированной позиции осуществляется с использованием системы обнаружения контрастности, блок 21 управления камеры вычисляет оценочные значения фокуса с заранее определенным интервалом выборки одновременно с приведением в движение фокусирующей линзы 33 для сканирования, и обнаруживает позицию линзы, в которой вычисленное оценочное значение фокуса является пиковым, в качестве сфокусированной позиции. В частности, блок 21 управления камеры приводит в движение фокусирующую линзу 33 для сканирования для перемещения плоскости изображения оптической системы в направлении оптической оси и, таким образом, вычисляет оценочные значения фокуса в разных плоскостях изображения и обнаруживает позицию линзы, в которой оценочное значение фокуса является пиковым, в качестве сфокусированной позиции. Если же скорость перемещения плоскости изображения чрезмерно высока, то интервал плоскостей изображения для вычисления оценочных значений фокуса становится чрезмерно большим, что не позволяет надлежащим образом обнаруживать сфокусированную позицию. В частности, коэффициент K перемещения плоскости изображения, представляющий величину перемещения плоскости изображения к величине движения фокусирующей линзы 33, изменяется в зависимости от позиции линзы на оптической оси фокусирующей линзы 33, и, следовательно, даже когда фокусирующая линза 33 приводится в движение с постоянной скоростью, в некоторых позициях линзы для фокусирующей линзы 33 скорость перемещения плоскости изображения становится чрезмерно высокой, и интервал плоскостей изображения для вычисления оценочных значений фокуса, таким образом, становится чрезмерно большим, что не позволяет надлежащим образом обнаруживать сфокусированную позицию.
[0074] Таким образом, согласно настоящему варианту осуществления, блок 21 управления камеры использует максимальный коэффициент Kmax перемещения плоскости изображения, полученный на этапе S106, как основу для вычисления скорости V сканирующего движения во время приведения в движение фокусирующей линзы 33 для сканирования. Блок 21 управления камеры использует максимальный коэффициент Kmax перемещения плоскости изображения для вычисления скорости V сканирующего движения, так что это максимальная скорость движения из тех, которые можно использовать для надлежащего обнаружения сфокусированной позиции с использованием системы обнаружения контрастности.
[0075] Затем, на этапе S107, операция сканирования инициируется с использованием скорости V сканирующего движения, определенной на этапе S106. В частности, блок 21 управления камеры отправляет команду инициирования сканирующего движения на блок 36 управления объектива, который использует команду как основание для приведения в действие приводного двигателя 331 фокусирующей линзы, благодаря чему, фокусирующая линза 33 приводится в движение для сканирования на скорости V сканирующего движения, определенной на этапе S106. Затем блок 21 управления камеры действует для: считывания пары элементов данных изображения, соответствующей паре изображений из пикселей 222a и 222b обнаружения фокуса устройства 22 формирования изображения с заранее определенным интервалом одновременно с приведением в движение фокусирующей линзы 33 на скорости V сканирующего движения; использования считанных данных как основания для осуществления вычисления величины расфокусировки с использованием системы обнаружения разности фаз и оценивания достоверности вычисленной величины расфокусировки; считывания пиксельных выходов из пикселей 221 формирования изображения устройства 22 формирования изображения с заранее определенным интервалом одновременно с приведением в движение фокусирующей линзы 33 на скорости V сканирующего движения; и использования считанных пиксельных выходов как оснований для вычисления и получения оценочных значений фокуса в разных позициях фокусирующей линзы и, таким образом, для осуществления обнаружения сфокусированной позиции с использованием системы обнаружения контрастности.
[0076] Затем, на этапе S108, блок 21 управления камеры производит определение, можно ли вычислить величину расфокусировки с использованием системы обнаружения разности фаз в результате операции сканирования. Если величину расфокусировки можно вычислить, то делается вывод, что измерение расстояния возможно, и процедура переходит к этапу S111, если же величину расфокусировки нельзя вычислить, то делается вывод, что измерение расстояния невозможно, и процедура переходит к этапу S109. Заметим, что, также на этапе S108, как и на этапе S105, даже в случае, когда величину расфокусировки можно вычислить, случаи, когда вычисленная величина расфокусировки имеет низкую достоверность, рассматриваются как случаи, когда величину расфокусировки невозможно вычислить, и процедура должна перейти к этапу S109.
[0077] На этапе S109, блок 21 управления камеры производит определение, можно ли обнаружить сфокусированную позицию с использованием системы обнаружения контрастности в результате операции сканирования. Если сфокусированную позицию можно обнаружить с использованием системы обнаружения контрастности, то процедура переходит к этапу S112, если же сфокусированную позицию нельзя обнаружить, то процедура переходит к этапу S110.
[0078] На этапе S110, блок 21 управления камеры производит определение, осуществлялась ли операция сканирования на протяжении всего диапазона движения фокусирующей линзы 33. Если операция сканирования не осуществляется на протяжении всего диапазона движения фокусирующей линзы 33, то процедура возвращается к этапу S108, и этапы S108-S110 повторяются, таким образом, продолжая осуществлять операцию сканирования, то есть операцию для одновременного осуществления вычисления величины расфокусировки с использованием системы обнаружения разности фаз и обнаружения сфокусированной позиции с использованием системы обнаружения контрастности с заранее определенным интервалом одновременно с приведением в движение фокусирующей линзы 33 для сканирования. Если же операция сканирования завершается на протяжении всего диапазона движения фокусирующей линзы 33, то процедура переходит к этапу S113.
[0079] В результате выполнения операции сканирования, если на этапе S108 определено, что величину расфокусировки можно вычислить с использованием системы обнаружения разности фаз, то, после обработки для остановки операции сканирования, процедура переходит к этапу S111, на котором фокусирующее движение осуществляется, как описано выше, для приведения в движение фокусирующей линзы 33 в сфокусированную позицию, обнаруженную с использованием системы обнаружения разности фаз.
[0080] Кроме того, в результате выполнения операции сканирования, если на этапе S109 определено, что сфокусированную позицию можно обнаружить с использованием системы обнаружения контрастности, то, после обработки для остановки операции сканирования, процедура переходит к этапу S112, на котором блок 21 управления камеры осуществляет фокусирующее движение для приведения в движение фокусирующей линзы 33 в сфокусированную позицию, обнаруженную с использованием системы обнаружения контрастности.
[0081] Если движение фокусирующей линзы 33 завершилось после приведения в движение фокусирующей линзы 33 в сфокусированную позицию, обнаруженную с использованием системы обнаружения разности фаз или в сфокусированную позицию, обнаруженную с использованием системы обнаружения контрастности, то завершенная фокусировка отображается через электронный видоискатель 26.
[0082] Если же на этапе S110 определено, что выполнение операции сканирования завершилось на протяжении всего диапазона движения фокусирующей линзы 33, то процедура переходит к этапу S113. На этапе S113, обработка осуществляется для окончания операции сканирования, поскольку в результате осуществления операции сканирования, сфокусированную позицию нельзя было обнаружить с использованием системы обнаружения контрастности, и после этого отображается невозможность фокусировки. Отображение невозможности фокусировки осуществляется с использованием, например, электронного видоискателя 26.
[0083] Как описано выше, согласно настоящему варианту осуществления, максимальный коэффициент Kmax перемещения плоскости изображения, который представляет максимальный коэффициент перемещения плоскости изображения из множества коэффициентов K перемещения плоскости изображения, сохраненных для соответствующих позиций фокусирующей линзы 33, получается от блока 36 управления объектива. Блок 21 управления камеры использует максимальный коэффициент Kmax перемещения плоскости изображения для вычисления скорости V сканирующего движения, так что это максимальная скорость движения из тех, которые можно использовать для надлежащего обнаружения сфокусированной позиции с использованием системы обнаружения контрастности, и, следовательно, интервал вычисления для оценочных значений фокуса (интервал плоскостей изображения для вычисления оценочных значений фокуса) имеет значение, подходящее для обнаружения фокуса, даже если фокусирующая линза 33 приводится в движение для сканирования в позицию, в которой коэффициент K перемещения плоскости изображения является максимальным значением (например, значение, равное максимальному коэффициенту Kmax перемещения плоскости изображения).
Это позволяет надлежащим образом обнаруживать сфокусированную позицию с использованием системы обнаружения контрастности согласно настоящему варианту осуществления, даже если коэффициент K перемещения плоскости изображения увеличивается (например, в случае максимального коэффициента Kmax перемещения плоскости изображения) в результате изменения коэффициента K перемещения плоскости изображения, когда фокусирующая линза 33 приводится в движение в направлении оптической оси.
[0084] Вышеописанный вариант осуществления демонстрирует конфигурацию, в которой максимальный коэффициент Kmax перемещения плоскости изображения, который представляет максимальный коэффициент перемещения плоскости изображения из множества коэффициентов K перемещения плоскости изображения, сохраненных для соответствующих позиций фокусирующей линзы 33, получается из объектива 3, и операция сканирования осуществляется с использованием скорости V сканирования, которая является максимальной скоростью движения для фокусирующей линзы 33, которая позволяет надлежащим образом осуществлять обнаружение фокуса с использованием системы обнаружения контрастности, даже если коэффициент K перемещения плоскости изображения во время приведения в движение фокусирующей линзы 33 такой же, как полученный максимальный коэффициент Kmax перемещения плоскости изображения, но настоящее изобретение не ограничивается этой конфигурацией, и также можно применять другую конфигурацию, например, описанную ниже.
[0085] Таким образом, больший из двух коэффициентов получается из объектива 3 как заранее определенный коэффициент Kpre перемещения плоскости изображения, причем один из двух коэффициентов является первым коэффициентом K1 перемещения плоскости изображения, который соответствует первой позиции на стороне ближнего конца от текущей позиции линзы для фокусирующей линзы 33, тогда как другой является вторым коэффициентом K2 перемещения плоскости изображения, который соответствует второй позиции на стороне конца бесконечности от текущей позиции линзы для фокусирующей линзы 33. В этом случае, можно применять такую конфигурацию, в которой операция сканирования осуществляется с использованием скорости V сканирования, которая является максимальной скоростью движения для фокусирующей линзы 33, которая позволяет надлежащим образом осуществлять обнаружение фокуса с использованием системы обнаружения контрастности, даже если коэффициент K перемещения плоскости изображения во время приведения в движение фокусирующей линзы 33 является заранее определенным коэффициентом Kpre перемещения плоскости изображения при осуществлении операции сканирования.
[0086] Если же заранее определенный коэффициент Kpre перемещения плоскости изображения, который соответствует заранее определенной позиции линзы для фокусирующей линзы 33 больше коэффициента Kcur перемещения плоскости изображения в текущей позиции линзы для фокусирующей линзы 33, то заранее определенный коэффициент Kpre перемещения плоскости изображения подлежит получению из объектива 3. В этом случае, можно применять такую конфигурацию, в которой операция сканирования осуществляется с использованием скорости V сканирования, которая является максимальной скоростью движения для фокусирующей линзы 33, которая позволяет надлежащим образом осуществлять обнаружение фокуса с использованием системы обнаружения контрастности, даже если коэффициент K перемещения плоскости изображения во время приведения в движение фокусирующей линзы 33 является полученным заранее определенным коэффициентом Kpre перемещения плоскости изображения при осуществлении операции сканирования.
[0087] Можно применять альтернативную конфигурацию, в которой работа согласно вышеописанному варианту осуществления выполняется только когда в качестве объектива 3 используется линза трансфокации с высоким увеличением. Линза трансфокации с высоким увеличением демонстрирует тенденцию к увеличению коэффициента перемещения плоскости изображения, что позволяет повысить точность обнаружения сфокусированной позиции с использованием системы обнаружения контрастности по сравнению с традиционным подходом.
[0088] Второй вариант осуществления
Теперь опишем второй вариант осуществления согласно настоящему изобретению. Второй вариант осуществления имеет такую же конфигурацию, как вышеописанный первый вариант осуществления, за исключением того, что камера 1, показанная на фиг. 1, действует, как будет описано ниже.
[0089] Таким образом, второй вариант осуществления имеет дополнительный признак, состоящий в том, что в блок-схеме операций, показанной на фиг. 7, после обнаружения сфокусированной позиции на этапе S109 с использованием системы обнаружения контрастности, при осуществлении на этапе S112 фокусирующего движения на основании результата системы обнаружения контрастности, производится определение, осуществлять ли движение для уменьшения люфта, и это определение используется как основание для изменения схемы движения для фокусирующей линзы 33 во время осуществления фокусирующего движения от схемы в вышеописанном первом варианте осуществления, так что в этом отношении второй вариант осуществления отличается от первого варианта осуществления, но другие признаки такие же, как у первого варианта осуществления.
[0090] В общем случае, приводной двигатель 331 фокусирующей линзы для приведения в движение фокусирующей линзы 33, как показано на фиг. 1, состоит из механического механизма передачи движения, который, например, содержит первый движущий механизм 500 и второй движущий механизм 600, как показано на фиг. 8, и выполнен так, что первый движущий механизм 500 приводится в действие для приведения в движение второго движущего механизма 600 на стороне фокусирующей линзы 33, чтобы, таким образом перемещать фокусирующую линзу 33 к стороне ближнего конца или стороне конца бесконечности. В таком механизме передачи движения, величина G люфта обычно обеспечиваться ввиду плавного действия сцепляющихся частей шестерен. Однако в системе обнаружения контрастности, благодаря ее механизму, фокусирующая линза 33 может приводиться в движение, как показано на (A) и (B) фиг. 9, так что фокусирующая линза 33 один раз проходит через сфокусированную позицию в операции сканирования и затем перемещается в сфокусированную позицию после обращения направления движения. Таким образом, характеристика в этом случае такова, что, если движение для уменьшения люфта не осуществляется, как показано на (B) фиг. 9, то позиция линзы для фокусирующей линзы 33 смещается в точности на величину G люфта. По этой причине, для устранения такого эффекта вследствие величины G люфта, как показано на (A) на фиг. 9, при осуществлении фокусирующего движения для фокусирующей линзы 33, может понадобиться осуществлять движение для уменьшения люфта, в котором фокусирующая линза 33 один раз проходит через сфокусированную позицию и затем переходит в сфокусированную позицию, снова обращая направление движения.
[0091] На фиг. 9 показан набор диаграмм, демонстрирующих соотношение между позицией фокусирующей линзы и оценочным значением фокуса и соотношения между позицией фокусирующей линзы и временем, когда операция сканирования и фокусирующее движение на основе системы обнаружения контрастности осуществляются согласно настоящему варианту осуществления. В (A) фиг. 9 показан аспект, который, после инициирования в момент времени t0 операции сканирования для фокусирующей линзы 33 от позиции P0 линзы в направлении от стороны конца бесконечности к стороне ближнего конца, если позиция P2 пика (сфокусированная позиция) оценочного значения фокуса обнаруживается в то время, когда фокусирующая линза 33 перемещается в позицию P1 линзы в момент времени t1, то операция сканирования останавливается, и фокусирующее движение осуществляется совместно с движением для уменьшения люфта для приведения, таким образом, в движение фокусирующей линзы 33 в сфокусированную позицию в момент времени t2. С другой стороны, в (B) фиг. 9 показан аспект, который, после инициирования в момент времени t0 операции сканирования таким же образом, операция сканирования останавливается в момент времени t1, и фокусирующее движение осуществляется без движения для уменьшения люфта для приведения, таким образом, в движение фокусирующей линзы 33 в сфокусированную позицию в момент времени t3.
[0092] Пример работы согласно второму варианту осуществления будет описано ниже со ссылкой на блок-схему операций, показанную на фиг. 10. Описанная ниже работа выполняется, если сфокусированная позиция обнаружена с использованием системы обнаружения контрастности на этапе S109 в вышеописанной блок-схеме операций, показанной на фиг. 7. Таким образом, как показано на (A) и (B) фиг. 9, после инициирования операции сканирования с момента времени t0, если позиция P2 пика (сфокусированная позиция) оценочного значения фокуса обнаружена в то время, когда фокусирующая линза 33 перемещалась в позицию P1 линзы в момент времени t1, то работа выполняется с момента времени t1.
[0093] В частности, если сфокусированная позиция обнаружена с использованием системы обнаружения контрастности, то блок 21 управления камеры осуществляет на этапе S201 получение коэффициента Kcur перемещения плоскости изображения текущей позиции в текущей позиции линзы 32 трансфокации и текущей позиции фокусирующей линзы 33. Например, согласно (A) и (B) фиг. 9, текущий коэффициент K перемещения плоскости изображения, соответствующий позиции P1 линзы в момент времени t0, получается в качестве коэффициента Kcur перемещения плоскости изображения текущей позиции. Коэффициент Kcur перемещения плоскости изображения текущей позиции можно получить от блока 36 управления объектива через приемопередающий блок 38 объектива и блок 21 управления камеры с использованием вышеописанной стационарной связи, которая осуществляется между блоком 21 управления камеры и блоком 36 управления объектива.
[0094] Затем, на этапе S202, блок 21 управления камеры осуществляет получение информации, касающейся величины G люфта (см. фиг. 8) механизма передачи движения для фокусирующей линзы 33. Величину G люфта механизма передачи движения для фокусирующей линзы 33 можно получать, например, предварительно сохраняя ее в памяти 37 объектива, обеспеченной в объективе 3 и обращаясь к ней. В частности, блок 21 управления камеры отправляет запрос передачи для величины G люфта механизма передачи движения для фокусирующей линзы 33 на блок 36 управления объектива через приемопередающий блок 29 камеры и приемопередающий блок 38 объектива, благодаря чему, блок 36 управления объектива передает величину G люфта механизма передачи движения для фокусирующей линзы 33, хранящуюся в памяти 37 объектива. Возможен также альтернативный вариант осуществления, в котором информация, касающаяся величины G люфта механизма передачи движения для фокусирующей линзы 33, хранящаяся в памяти 37 объектива, включается в информацию объектива, подлежащую передаче и приему при осуществлении вышеописанной стационарной связи между блоком 21 управления камеры и блоком 36 управления объектива.
[0095] Затем, на этапе S203, блок 21 управления камеры вычисляет величину IG перемещения плоскости изображения, соответствующую величине G люфта на основании вышеописанного коэффициента Kcur перемещения плоскости изображения текущей позиции, полученного на этапе S201 и вышеописанной информации, касающейся величины G люфта механизма передачи движения для фокусирующей линзы 33, полученной на этапе S202. Величина IG перемещения плоскости изображения, соответствующая величине G люфта, является величиной перемещения плоскости изображения, когда фокусирующая линза приводится в движение на величину, в точности равную величине G люфта, и может вычисляться в соответствии с нижеследующим выражением (2) в настоящем варианте осуществления.
(величина IG перемещения плоскости изображения, соответствующая величине G люфта)=(величина G люфта)×(коэффициент Kcur перемещения плоскости изображения текущей позиции) …(2)
[0096] Затем, на этапе S204, блок 21 управления камеры осуществляет процесс сравнения вышеописанной величины IG перемещения плоскости изображения, соответствующей величине G люфта, вычисленной на этапе S203, с заранее определенной величиной IP перемещения плоскости изображения, и результат этого сравнения используется для производства определения, не превышает ли величина IG перемещения плоскости изображения, соответствующая величине G люфта, заранее определенную величину IP перемещения плоскости изображения, т.е. выполняется ли условие (величина IG перемещения плоскости изображения, соответствующая величине G люфта)≤(заранее определенная величина IP перемещения плоскости изображения). Заранее определенную величину IP перемещения плоскости изображения можно установить так, чтобы она соответствовала глубине фокусировки оптической системы, и обычно равной величине перемещения плоскости изображения, которая соответствует глубине фокусировки. Возможен также альтернативный вариант осуществления, в котором заранее определенная величина IP перемещения плоскости изображения надлежащим образом устанавливается в зависимости от значения F, размера ячейки устройства 22 формирования изображения или формата захватываемого изображения и т.д., поскольку заранее определенная величина IP перемещения плоскости изображения устанавливается в соответствии с глубиной фокусировки оптической системы. В частности, заранее определенную величину IP перемещения плоскости изображения можно установить так, чтобы ее значение возрастало с увеличением значения F. Альтернативно или дополнительно, заранее определенную величину IP перемещения плоскости изображения можно установить так, чтобы ее значение возрастало с увеличением размера ячейки устройства 22 формирования изображения или уменьшением формата изображения. Если величина IG перемещения плоскости изображения, соответствующая величине G люфта, не превышает заранее определенной величины IP перемещения плоскости изображения, то процедура переходит к этапу S205. Если же величина IG перемещения плоскости изображения, соответствующая величине G люфта, больше заранее определенной величины IP перемещения плоскости изображения, то процедура переходит к этапу S206.
[0097] Если на вышеописанном этапе S204 определено, что величина IG перемещения плоскости изображения, соответствующая величине G люфта, не превышает заранее определенной величины IP перемещения плоскости изображения, то на этапе S205 принимается решение, что позиция линзы для фокусирующей линзы 33 после приведения в движение может оказаться в пределах глубины фокусировки оптической системы даже без движения для уменьшения люфта, и что движение для уменьшения люфта не подлежит осуществлению во время фокусирующего движения, и такое решение используется как основание для осуществления фокусирующего движения без движения для уменьшения люфта. Таким образом, производится определение, что фокусирующая линза 33 приводится в движение непосредственно в сфокусированную позицию во время осуществления фокусирующего движения, и это определение используется как основание для осуществления фокусирующего движения без движения для уменьшения люфта, как показано на (B) фиг. 9.
[0098] Если же на вышеописанном этапе S204 определено, что величина IG перемещения плоскости изображения, соответствующая величине G люфта, больше заранее определенной величины IP перемещения плоскости изображения, то на этапе S206 принимается решение, что позиция линзы для фокусирующей линзы 33 после приведения в движение не может оказаться в пределах глубины фокусировки оптической системы, если движение для уменьшения люфта не осуществляется, и что движение для уменьшения люфта подлежит осуществлению во время фокусирующего движения, и такое решение используется как основание для осуществления фокусирующего движения совместно с движением для уменьшения люфта. Таким образом, производится определение, что, во время осуществления фокусирующего движения, фокусирующая линза 33 приводится в движение для однократного прохождения через сфокусированную позицию и затем приводится в движение в сфокусированную позицию, снова обращая направление движения, и это определение используется как основание для осуществления фокусирующего движения совместно с движением для уменьшения люфта, как показано на (A) фиг. 9.
[0099] Согласно второму варианту осуществления, как описано выше, коэффициент Kcur перемещения плоскости изображения текущей позиции и информация, касающаяся величины G люфта механизма передачи движения для фокусирующей линзы 33, используются как основа для вычисления величины IG перемещения плоскости изображения, соответствующей величине G люфта, и производится определение, не превышает ли вычисленная величина IG перемещения плоскости изображения, соответствующая величине G люфта, заранее определенной величины IP перемещения плоскости изображения, соответствующей глубине фокусировки оптической системы, для определения, таким образом, осуществлять ли движение для уменьшения люфта во время осуществления фокусирующего движения. В результате определения, если величина IG перемещения плоскости изображения, соответствующая величине G люфта, не превышает заранее определенной величины IP перемещения плоскости изображения, соответствующей глубине фокусировки оптической системы, и позиция линзы для фокусирующей линзы 33 после приведения в движение может, таким образом, оказаться в пределах глубины фокусировки оптической системы, то движение для уменьшения люфта не осуществляется, если же величина IG перемещения плоскости изображения, соответствующая величине G люфта, больше заранее определенной величины IP перемещения плоскости изображения, соответствующей глубине фокусировки оптической системы, и позиция линзы для фокусирующей линзы 33 после приведения в движение, таким образом, не может оказаться в пределах глубины фокусировки оптической системы без движения для уменьшения люфта, то осуществляется движение для уменьшения люфта. Таким образом, согласно настоящему варианту осуществления, если движение для уменьшения люфта не требуется, то движение для уменьшения люфта не осуществляется, что позволяет сократить время, необходимое для фокусирующего движения, и таким образом, можно сократить время, связанное с операцией фокусировки. Если же движение для уменьшения люфта необходимо, то осуществляется движение для уменьшения люфта, что позволяет повысить точность фокусировки.
[0100] В частности, согласно второму варианту осуществления, коэффициент K перемещения плоскости изображения, который изменяется в зависимости от позиции линзы для линзы 32 трансфокации и позиции линзы для фокусирующей линзы 33, используется для вычисления величины IG перемещения плоскости изображения, соответствующей величине G люфта, которая сравнивается с заранее определенной величиной IP перемещения плоскости изображения, соответствующей глубине фокусировки оптической системы, что позволяет надлежащим образом определить, необходимо ли движение для уменьшения люфта во время фокусировки.
[0101] Третий вариант осуществления
Теперь опишем третий вариант осуществления согласно настоящему изобретению. Третий вариант осуществления имеет такую же конфигурацию, как вышеописанный второй вариант осуществления, за исключением того, что камера 1, показанная на фиг. 1, действует, как будет описано ниже.
[0102] Согласно вышеописанному второму варианту осуществления величина IG перемещения плоскости изображения, соответствующая величине G люфта, вычисляется с использованием коэффициента Kcur перемещения плоскости изображения текущей позиции, который соответствует позиции линзы для линзы 32 трансфокации и позиции линзы для фокусирующей линзы 33 во время инициирования обратного движения по завершении операции сканирования для фокусирующей линзы 33 при вычислении величины IG перемещения плоскости изображения, соответствующей величине G люфта. Напротив, согласно третьему варианту осуществления, максимальный коэффициент Kmax перемещения плоскости изображения, соответствующий текущей позиции линзы для линзы 32 трансфокации, используется вместо коэффициента Kcur перемещения плоскости изображения текущей позиции для вычисления величины IG перемещения плоскости изображения, соответствующей величине G люфта, и в этом отношении третий вариант осуществления отличается от вышеописанного второго варианта осуществления.
[0103] Пример работы согласно третьему варианту осуществления будет описано ниже со ссылкой на блок-схему операций, показанную на фиг. 11. Аналогично вышеописанному второму варианту осуществления, описанная ниже работа выполняется, если сфокусированная позиция обнаружена с использованием системы обнаружения контрастности на этапе S109 в вышеописанной блок-схеме операций, показанной на фиг. 7.
[0104] В частности, если сфокусированная позиция обнаружена с использованием системы обнаружения контрастности, то блок 21 управления камеры осуществляет на этапе S301 получение максимального коэффициента Kmax перемещения плоскости изображения в текущей позиции линзы 32 трансфокации. Например, если позиция линзы для линзы 32 трансфокации (фокусное расстояние) находится в "f5" в таблице, показанной на фиг. 6, то "K52" в серой ячейке получается в качестве максимального коэффициента Kmax перемещения плоскости изображения.
[0105] Согласно настоящему варианту осуществления, временной режим, в котором блок 21 управления камеры получает максимальный коэффициент Kmax перемещения плоскости изображения, может представлять собой время, когда обратное движение фокусирующей линзы 33 выполняется после обнаружения сфокусированной позиции с использованием системы обнаружения контрастности, но в противном случае может представлять собой время, когда кнопка спуска затвора, предусмотренная на операционном блоке 28, была полунажата (первый переключатель SW1 включен), или время, когда операция регулировки фокуса была инициирована вследствие полунажатия кнопки спуска затвора. Таким образом, для получения максимального коэффициента Kmax перемещения плоскости изображения в то время, когда кнопка спуска затвора была полунажата или в то время, когда операция регулировки фокуса была инициирована вследствие полунажатия кнопки спуска затвора, блок 21 управления камеры может отправлять в это время сигнал, запрашивающий передачу максимального коэффициента Kmax перемещения плоскости изображения, через приемопередающий блок 29 камеры и приемопередающий блок 38 объектива, чтобы, таким образом, получить его. В этом случае, блок 36 управления объектива может быть выполнен с возможностью: принимать от блока 21 управления камеры сигнал, запрашивающий передачу максимального коэффициента Kmax перемещения плоскости изображения; использовать его как основание для обращения к таблице, которая хранится в памяти 37 объектива и представляет соотношение между каждой позицией линзы и коэффициентом K перемещения плоскости изображения, чтобы, таким образом, получить максимальный коэффициент Kmax перемещения плоскости изображения; и передавать его на блок 21 управления камеры через приемопередающий блок 38 объектива и приемопередающий блок 29 камеры.
[0106] Возможна также альтернативная конфигурация, в которой блок 21 управления камеры получает максимальный коэффициент Kmax перемещения плоскости изображения также в случае, когда позиция линзы для линзы 32 трансфокации изменяется, поскольку приведение в движение линзы 32 трансфокации может приводить к изменению позиции линзы для линзы 32 трансфокации и, таким образом, к отличию в максимальном коэффициенте Kmax перемещения плоскости изображения.
[0107] Затем, на этапе S302, как и на вышеописанном этапе S202, показанном на фиг. 10, блок 21 управления камеры осуществляет получение информации, касающейся величины G люфта (см. фиг. 8) механизма передачи движения для фокусирующей линзы 33.
[0108] Затем, на этапе S303, блок 21 управления камеры вычисляет величину IG перемещения плоскости изображения, соответствующую величине G люфта на основании вышеописанного максимального коэффициента Kmax перемещения плоскости изображения, полученного на этапе S301, и вышеописанной информации, касающейся величины G люфта механизма передачи движения для фокусирующей линзы 33, полученной на этапе S302. Величина IG перемещения плоскости изображения, соответствующая величине G люфта, является величиной перемещения плоскости изображения, когда фокусирующая линза приводится в движение на величину, в точности равную величине G люфта, и может вычисляться в соответствии с нижеприведенным выражением (3) в настоящем варианте осуществления.
(величина IG перемещения плоскости изображения, соответствующая величине G люфта)=(величина G люфта)×(максимальный коэффициент Kmax перемещения плоскости изображения) …(3)
[0109] Затем, на этапе S304, как и на вышеописанном этапе S204, показанном на фиг. 10, блок 21 управления камеры осуществляет процесс сравнения вышеописанной величины IG перемещения плоскости изображения, соответствующей величине G люфта, вычисленной на этапе S303, с заранее определенной величиной IP перемещения плоскости изображения, и результат этого сравнения используется для производства определения, не превышает ли величина IG перемещения плоскости изображения, соответствующая величине G люфта, заранее определенную величину IP перемещения плоскости изображения, т.е. выполняется ли условие (величина IG перемещения плоскости изображения, соответствующая величине G люфта)≤(заранее определенная величина IP перемещения плоскости изображения). Заранее определенную величину IP перемещения плоскости изображения можно установить так таким же образом, как в вышеописанном втором варианте осуществления.
[0110] Если на вышеописанном этапе S304 определено, что величина IG перемещения плоскости изображения, соответствующая величине G люфта, не превышает заранее определенной величины IP перемещения плоскости изображения, то на этапе S305, как и на вышеописанном этапе S205, показанном на фиг. 10, принимается решение, что позиция линзы для фокусирующей линзы 33 после приведения в движение может оказаться в пределах глубины фокусировки оптической системы даже без движения для уменьшения люфта, и что движение для уменьшения люфта не подлежит осуществлению во время фокусирующего движения, и такое решение используется как основание для осуществления фокусирующего движения без движения для уменьшения люфта.
[0111] Если же на вышеописанном этапе S304 определено, что величина IG перемещения плоскости изображения, соответствующая величине G люфта, больше заранее определенной величины IP перемещения плоскости изображения, то на этапе S306, как и на вышеописанном этапе S206, показанном на фиг. 10, принимается решение, что позиция линзы для фокусирующей линзы 33 после приведения в движение не может оказаться в пределах глубины фокусировки оптической системы, если движение для уменьшения люфта не осуществляется, и что движение для уменьшения люфта подлежит осуществлению во время фокусирующего движения, и такое решение используется как основание для осуществления фокусирующего движения совместно с движением для уменьшения люфта.
[0112] Согласно третьему варианту осуществления, можно получить положительные результаты помимо тех, которые описаны выше во втором варианте осуществления.
Таким образом, третий вариант осуществления может эффективно препятствовать тому, что, даже когда движение для уменьшения люфта действительно необходимо, движение для уменьшения люфта, тем не менее, может определяться как ненужное, в зависимости от позиции линзы для фокусирующей линзы 33, поскольку максимальный коэффициент Kmax перемещения плоскости изображения, который устанавливается для каждой позиции линзы для линзы 32 трансфокации, используется в третьем варианте осуществления для вычисления величины IG перемещения плоскости изображения, соответствующей величине G люфта механизма передачи движения для фокусирующей линзы 33, что позволяет определять, необходимо ли движение для уменьшения люфта во время фокусировки, независимо от позиции линзы для фокусирующей линзы 33. В частности, если используется объектив, отличающийся тем, что коэффициент K перемещения плоскости изображения значительно изменяется, несмотря на одну и ту же позицию линзы для линзы 32 трансфокации, когда позиция линзы для фокусирующей линзы 33 изменяется, то, даже когда движение для уменьшения люфта действительно необходимо, вероятность определения, что движение для уменьшения люфта не требуется, высока, поэтому в таком случае настоящий вариант осуществления особенно эффективен.
[0113] Таким образом, в зависимости от типов объективов, вследствие их конструкции, считается, что отношение изменения коэффициента K перемещения плоскости изображения к изменению позиции линзы для фокусирующей линзы 33 различается. В этом отношении, модифицированный вариант осуществления может предусматривать, что, например, когда объектив 3 присоединен к корпусу 2 камеры, производится определение, не меньше ли отношение изменения коэффициента K перемещения плоскости изображения к изменению позиции линзы для фокусирующей линзы 33 заранее определенного порога, и если не меньше заранее определенного порога, то используется максимальный коэффициент Kmax перемещения плоскости изображения, как в третьем варианте осуществления, если же меньше заранее определенного порога, то используется коэффициент Kcur перемещения плоскости изображения текущей позиции, как во втором варианте осуществления, что позволяет надлежащим образом осуществлять такой выбор.
[0114] Четвертый вариант осуществления
Теперь опишем четвертый вариант осуществления согласно настоящему изобретению. Четвертый вариант осуществления имеет такую же конфигурацию, как вышеописанный второй вариант осуществления за исключением того, что камера 1, показанная на фиг. 1, действует, как будет описано ниже.
[0115] Согласно вышеописанному второму варианту осуществления величина IG перемещения плоскости изображения, соответствующая величине G люфта, вычисляется с использованием коэффициента Kcur перемещения плоскости изображения текущей позиции, который соответствует позиции линзы для линзы 32 трансфокации и позиции линзы для фокусирующей линзы 33 во время инициирования обратного движения по завершении операции сканирования для фокусирующей линзы 33 при вычислении величины IG перемещения плоскости изображения, соответствующей величине G люфта. Напротив, согласно четвертому варианту осуществления, вместо коэффициента Kcur перемещения плоскости изображения текущей позиции, коэффициент K перемещения плоскости изображения, который соответствует позиции линзы для фокусирующей линзы 33 при нахождении в окрестности сфокусированной позиции получается как коэффициент Kfou перемещения плоскости изображения окрестности фокусировки, который используется для вычисления величины IG перемещения плоскости изображения, соответствующей величине G люфта, таким образом, в этом отношении четвертый вариант осуществления отличается от вышеописанного второго варианта осуществления.
[0116] Пример работы согласно четвертому варианту осуществления будет описан ниже со ссылкой на блок-схему операций, показанную на фиг. 12. Аналогично вышеописанному второму варианту осуществления, описанная ниже работа выполняется, если сфокусированная позиция обнаружена с использованием системы обнаружения контрастности на этапе S109 в вышеописанной блок-схеме операций, показанной на фиг. 7.
[0117] В частности, если сфокусированная позиция обнаружена с использованием системы обнаружения контрастности, то блок 21 управления камеры осуществляет на этапе S401 процесс получения коэффициента K перемещения плоскости изображения, который соответствует позиции линзы для фокусирующей линзы 33 при нахождении в окрестности сфокусированной позиции как коэффициент Kfou перемещения плоскости изображения окрестности фокусировки. Способ получения коэффициента Kfou перемещения плоскости изображения окрестности фокусировки может осуществляться, например, следующим образом. Таким образом, при выполнении операции сканирования для фокусирующей линзы 33, блок 21 управления камеры последовательно сохраняет коэффициент K перемещения плоскости изображения, соответствующий текущей позиции линзы, который получается с использованием стационарной связи между блоком 21 управления камеры и блоком 36 управления объектива, совместно с информацией, касающейся позиции линзы для фокусирующей линзы 33. Затем, при обнаружении сфокусированной позиции, считывается коэффициент K перемещения плоскости изображения, когда фокусирующая линза 33 находится в окрестности сфокусированной позиции, который можно использовать в качестве коэффициента Kfou перемещения плоскости изображения окрестности фокусировки.
[0118] Затем, на этапе S402, как и на вышеописанном этапе S202, показанном на фиг. 10, блок 21 управления камеры осуществляет получение информации, касающейся величины G люфта (см. фиг. 8) механизма передачи движения для фокусирующей линзы 33.
[0119] Затем, на этапе S403, блок 21 управления камеры вычисляет величину IG перемещения плоскости изображения, соответствующую величине G люфта на основании вышеописанного коэффициента Kfou перемещения плоскости изображения окрестности фокусировки, полученного на этапе S401, и вышеописанной информации, касающейся величины G люфта механизма передачи движения для фокусирующей линзы 33, полученной на этапе S402. Величина IG перемещения плоскости изображения, соответствующая величине G люфта, является величиной перемещения плоскости изображения, когда фокусирующая линза приводится в движение на величину, в точности равную величине G люфта, и может вычисляться в соответствии с нижеприведенным выражением (4) в настоящем варианте осуществления.
(величина IG перемещения плоскости изображения, соответствующая величине G люфта)=(величина G люфта)×(коэффициент Kfou перемещения плоскости изображения окрестности фокусировки) …(4)
[0120] Затем, на этапе S404, как и на вышеописанном этапе S204, показанном на фиг. 10, блок 21 управления камеры осуществляет процесс сравнения вышеописанной величины IG перемещения плоскости изображения, соответствующей величине G люфта, вычисленной на этапе S403 с заранее определенной величиной IP перемещения плоскости изображения, и результат этого сравнения используется для производства определения, не превышает ли величина IG перемещения плоскости изображения, соответствующая величине G люфта, заранее определенную величину IP перемещения плоскости изображения, т.е. выполняется ли условие (величина IG перемещения плоскости изображения, соответствующая величине G люфта)≤(заранее определенная величина IP перемещения плоскости изображения). Заранее определенную величину IP перемещения плоскости изображения можно установить так таким же образом, как в вышеописанном втором варианте осуществления.
[0121] Если на вышеописанном этапе S404 определено, что величина IG перемещения плоскости изображения, соответствующая величине G люфта, не превышает заранее определенной величины IP перемещения плоскости изображения, то на этапе S405, как и на вышеописанном этапе S205, показанном на фиг. 10, принимается решение, что позиция линзы для фокусирующей линзы 33 после приведения в движение может оказаться в пределах глубины фокусировки оптической системы даже без движения для уменьшения люфта, и что движение для уменьшения люфта не подлежит осуществлению во время фокусирующего движения, и такое решение используется как основание для осуществления фокусирующего движения без движения для уменьшения люфта.
[0122] Если же на вышеописанном этапе S404 определено, что величина IG перемещения плоскости изображения, соответствующая величине G люфта, больше заранее определенной величины IP перемещения плоскости изображения, то на этапе S406, как и на вышеописанном этапе S206, показанном на фиг. 10, принимается решение, что позиция линзы для фокусирующей линзы 33 после приведения в движение не может оказаться в пределах глубины фокусировки оптической системы, если движение для уменьшения люфта не осуществляется, и что движение для уменьшения люфта подлежит осуществлению во время фокусирующего движения, и такое решение используется как основание для осуществления фокусирующего движения совместно с движением для уменьшения люфта.
[0123] Согласно четвертому варианту осуществления, можно получить положительные результаты помимо тех, которые описаны выше во втором варианте осуществления.
Таким образом, согласно четвертому варианту осуществления, при вычислении величины IG перемещения плоскости изображения, соответствующей величине G люфта механизма передачи движения для фокусирующей линзы 33, используется коэффициент Kfou перемещения плоскости изображения окрестности фокусировки, который является коэффициентом перемещения плоскости изображения, который соответствует позиции линзы для фокусирующей линзы 33 при нахождении в окрестности сфокусированной позиции, и в этом случае вычисленная величина IG перемещения плоскости изображения, соответствующая величине G люфта, может базироваться на коэффициенте перемещения плоскости изображения, когда фокусирующая линза 33 действительно приводится в движение в сфокусированную позицию. Соответственно, четвертый вариант осуществления может вычислять величину IG перемещения плоскости изображения, соответствующую величине G люфта с более высокой точностью, что позволяет лучше производить определение, необходимо ли движение для уменьшения люфта.
[0124] Пятый вариант осуществления
Теперь опишем пятый вариант осуществления согласно настоящему изобретению. В пятом варианте осуществления, описание конфигурации, аналогичной описанной выше в первом варианте осуществления, будет опущено.
[0125] Работа согласно пятому варианту осуществления, описанному ниже, может выполняться в сочетании с любой из тех, которые соответствуют вышеописанным вариантам осуществления с первого по четвертый, или выполняться по одному, отдельно от тех, которые соответствуют согласно вариантам осуществления с первого по четвертый.
[0126] Однообъективная зеркальная цифровая камера 1a согласно пятому варианту осуществления, как показано на фиг. 13, содержит корпус 2a камеры, зеркальную систему 240, модуль 210 фазоразностной АФ и оптическую систему искателя, и в этом отношении ее конфигурация отличается от конфигурации вышеописанной камеры 1.
[0127] Зеркальная система 240 содержит: быстро возвращающееся зеркало 241, которое поворотно перемещается вокруг оси поворота 243 в заранее определенном угловом диапазоне между позицией наблюдения и позицией формирования изображения к объекту; и вспомогательное зеркало 242, которое поворотно поддерживается на быстро возвращающемся зеркале 241 и поворотно перемещается синхронно с поворотным перемещением быстро возвращающегося зеркала 241. На фиг. 13, состояние, когда зеркальная система 240 располагается в позиции наблюдения к объекту, указано сплошными линиями, тогда как состояние, когда зеркальная система 240 располагается в позиции формирования изображения к объекту указано двухточечно-штриховыми линиями.
[0128] Быстро возвращающееся зеркало 241 состоит из полупрозрачного зеркала и, в состоянии нахождения в позиции наблюдения к объекту, отражает часть световых пучков (оптические оси L3 и L4) из идущих от объекта (оптическая ось L1) для направления их к искателю 135, и фотометрического датчика 137, одновременно пропуская оставшиеся световые пучки (оптическая ось L5) для направления их к вспомогательному зеркалу 242. Напротив, вспомогательное зеркало 242 состоит из полностью отражающего зеркала и направляет световые пучки (оптическая ось L4), пропущенные через быстро возвращающееся зеркало 241, на модуль 210 фазоразностной АФ.
[0129] Световые пучки от объекта, отраженные быстро возвращающимся зеркалом 241, формируют изображение на экране 231 фокусировки, размещенном в плоскости, оптически эквивалентном устройству 22a формирования изображения, что позволяет наблюдать его через пентапризму 233 и линзу 234 окуляра. В это время, устройство 232 жидкокристаллический дисплей пропускающего типа накладывает указатели, например, метку области обнаружения фокуса на изображение объекта, проецируемое на пластину 131 фокальной плоскости для их отображения.
[0130] Операционный блок 28 имеет переключатель включения/выключения формирования изображения с визированием по экрану (не показан). Когда формирование изображения с визированием по экрану отключено, и зеркальная система 240 находится в состоянии нахождения в позиции наблюдения к объекту, фазоразностная АФ может осуществляться с использованием модуля 210 фазоразностной АФ. Кроме того, если формирование изображения с визированием по экрану включено, то зеркальная система 240 переходит в позицию формирования изображения к объекту, и получается состояние, в котором световые пучки от объекта направляются на устройство 22a формирования изображения (например, состояние, когда отображается мнимое изображение), что позволяет осуществлять АФ по контрастности. В этом случае, может осуществляться операция, аналогичная представленной в вышеописанных вариантах осуществления с первого по четвертый. Теперь подробно опишем примеры работы согласно пятому варианту осуществления со ссылкой на фиг. 14, 15 и 16.
[0131] Операция, показанная на фиг. 14, инициируется включением питания камеры 1a. Сначала, на этапе S501, корпус 2a камеры осуществляет связь для идентификации объектива 3. Дело в том, что доступный формат связи различается в зависимости от типов объективов.
[0132] Затем, на этапе S502, производится определение, использует ли фотограф переключатель включения/выключения формирования изображения с визированием по экрану, предусмотренный на операционном блоке 28, и если формирование изображения с визированием по экрану включено, то зеркальная система 240 переходит в позицию формирования изображения к объекту, благодаря чему, световые пучки от объекта направляются на устройство 22a формирования изображения.
[0133] На этапе S503, инициируется стационарная связь между корпусом 2a камеры и объективом 3. При осуществлении стационарной связи, блок 36 управления объектива, в случае приема первого сигнала запроса от блока 21 управления камеры, неоднократно передает информацию объектива, например, коэффициент Kcur перемещения плоскости изображения текущей позиции, на блок 21 управления камеры. Стационарная связь неоднократно осуществляется на этапе S503 и на последующих этапах. Предпочтительно, чтобы стационарная связь осуществлялась неоднократно, например, до отключения переключателя питания.
[0134] На этапе S504 производится определение, осуществил ли фотограф определенную операцию, например, операцию полунажатия спусковой кнопки, предусмотренной на операционном блоке 28 (первый переключатель SW1 включен), или операцию инициирования АФ, и если такая операция произведена, то процедура переходит к этапу S505 (далее будет подробно описан случай, когда производится операция полунажатия).
[0135] На этапе S505, блок 21 управления камеры запускается операцией полунажатия (первый переключатель SW1 включен), осуществляемой фотографом для передачи второго сигнала запроса на блок 36 управления объектива. Условия для передачи второго сигнала запроса на блок 36 управления объектива могут включать в себя случай, когда фотограф осуществляет операцию инициирования АФ, случай, когда полунажатие кнопки спуска затвора инициирует операцию регулировки фокуса, случай, когда фотограф осуществляет операцию для приведения в движение линзы 32 трансфокации и случай, когда питание камеры 1a включено.
[0136] На этапе S506, приняв второй сигнал запроса, блок 36 управления объектива обращается к таблице (см. фиг. 6), которая хранится в памяти 37 объектива и представляет соотношение между каждой позицией линзы и коэффициентом K перемещения плоскости изображения, для получения максимального коэффициента Kmax перемещения плоскости изображения и минимального коэффициента Kmin перемещения плоскости изображения, которые соответствуют текущей позиции линзы для линзы 32 трансфокации, и передает максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения на блок 21 управления камеры.
[0137] На этапе S507, блок 21 управления камеры передает команду сканирующего движения (инструкцию для инициирования сканирующего движения) на блок 36 управления объектива для осуществления обнаружения фокуса с использованием системы обнаружения контрастности. Команда сканирующего движения на блок 36 управления объектива (инструкция скорости движения для сканирующего движения или инструкция позиции движения) может задаваться как скорость движения для фокусирующей линзы 33, скорость перемещения плоскости изображения или конечная позиция движения и т.д. Затем, на этапе S508, блок 36 управления объектива осуществляет управление приводом для фокусирующей линзы 33 на основании команды сканирующего движения.
[0138] Затем, на этапе S509, блок 21 управления камеры осуществляет процесс определения нарушения, который будет описано ниже. На этапе S510, блок 21 управления камеры определяет, можно ли обнаружить пиковое значение оценочного значения фокуса (можно ли обнаружить сфокусированную позицию). Если пиковое значение оценочного значения фокуса невозможно обнаружить, процедура возвращается к этапу S508, если же пиковое значение оценочного значения фокуса можно обнаружить, процедура переходит к этапу S511.
[0139] На этапе S511, блок 21 управления камеры передает на блок 36 управления объектива команду для осуществления фокусирующего движения в позицию, соответствующую пиковому значению оценочного значения фокуса. Блок 36 управления объектива осуществляет управление приводом для фокусирующей линзы 33 в ответ на принятую команду.
[0140] На этапе S512, блок 21 управления камеры принимает решение, что фокусирующая линза 33 достигла позиции, соответствующей пиковому значению оценочного значения фокуса, и осуществляет управление формированием изображения для неподвижного изображения, если фотограф осуществил операцию полного нажатия (второй переключатель SW2 включен). По завершении управления формированием изображения, процедура снова возвращается к этапу S503.
[0141] Теперь подробно опишем процесс определения нарушения (см. этап S509 на фиг. 14) со ссылкой на фиг. 15 и 16.
Сначала обратимся к фиг. 15. На этапе S601, производится определение, превышает ли коэффициент Kcur перемещения плоскости изображения текущей позиции, повторно полученный посредством стационарной связи, вышеописанный максимальный коэффициент Kmax перемещения плоскости изображения, полученный на этапе S506. Таким образом, производится определение, обнаружен ли коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции). Если обнаружен коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции), делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3, и процедура переходит к этапу S605, на котором флаг нарушения устанавливается равным "1" для выхода из процесса определения нарушения, после которого выполняется этап S510, показанный на фиг. 14. Заметим, что флаг нарушения устанавливается равным "0" в нормальных условиях, например, когда нарушения не происходит. Если же коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции), не обнаружен, то процедура переходит к этапу S602.
[0142] На этапе S602, производится определение, приводится ли в движение фокусирующая линза 33 от ближнего конца к концу бесконечности от времени включения питания камеры 1 до текущего времени. Если фокусирующая линза 33 приводится в движение от ближнего конца к концу бесконечности, то процедура переходит к этапу S606, на котором производится определение, можно ли, в результате приведения в движение фокусирующей линзы 33 от ближнего конца к концу бесконечности, обнаружить коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения) из полученных посредством стационарной связи. Если, несмотря на то, что фокусирующая линза 33, приводимая в движение от ближнего конца к концу бесконечности, коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения), невозможно обнаружить, делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3, и процедура переходит к этапу S607, на котором флаг нарушения устанавливается равным "2" для выхода из процесса определения нарушения, после которого выполняется этап S510, показанный на фиг. 14. Если на этапе S606, коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения), можно обнаружить, то процедура выходит из процесса определения нарушения и переходит к этапу S510, показанному на фиг. 14.
[0143] Если на этапе S602 было определено, что фокусирующая линза 33 не приводится в движение от ближнего конца к концу бесконечности, то процедура переходит к этапу S603.
[0144] Затем, на этапе S603, блок 21 управления камеры определяет, осуществлялась ли операция движения для линзы 32 трансфокации. Если определено, что операцию движения для линзы 32 трансфокации нужно осуществить, процедура переходит к этапу S604, если же определено, что операция движения для линзы 32 трансфокации не подлежит осуществлению, процедура выходит из процесса определения нарушения и переходит к этапу S510, показанному на фиг. 14.
[0145] На этапе S604, блок 21 управления камеры снова передает второй сигнал запроса на блок 36 управления объектива, который затем возвращает на блок 21 управления камеры максимальный коэффициент Kmax перемещения плоскости изображения, который соответствует позиции линзы для линзы 32 трансфокации после приведения ее в движение. Кроме того, блок 21 управления камеры инициализирует максимальный коэффициент Kmax перемещения плоскости изображения и коэффициент Kcur перемещения плоскости изображения текущей позиции, полученные до приведения в движение линзы 32 трансфокации.
Дело в том, что вышеописанные определения на этапах S601 и S606 состоят в сравнении максимального коэффициента Kmax перемещения плоскости изображения и коэффициента Kcur перемещения плоскости изображения текущей позиции, полученных, когда линза 32 трансфокации находилась в одной и той же позиции линзы, так что, если позиция линзы для линзы 32 трансфокации изменяется, то вышеописанные определения на этапах S601 и S606 невозможно надлежащим образом осуществлять, пока максимальный коэффициент Kmax перемещения плоскости изображения и коэффициент Kcur перемещения плоскости изображения текущей позиции не будут вновь собраны. По завершении процесса на этапе S604, процедура возвращается к этапу S601.
[0146] Теперь, согласно фиг. 16, подробно опишем случай, когда флаг нарушения устанавливается равным "1". В описании согласно фиг. 16 будет приведен пример случая, когда позиция линзы трансфокации (фокусное расстояние) находится в "f1" (см. фиг. 6).
[0147] Фиг. 16 демонстрирует случай, когда операция полунажатия кнопки спуска затвора осуществлялась фотографом в момент времени t2, и в этом случае предполагается, что блок 36 управления объектива передает в момент времени t4 на блок 21 управления камеры в качестве максимального коэффициента Kmax перемещения плоскости изображения "K12", а не "K11". Затем блок 21 управления камеры отправляет в момент времени t7 команду сканирующего движения на блок 36 управления объектива. В момент времени t1, t3, t5, t6 до команды сканирующего движения, максимальный коэффициент Kmax перемещения плоскости изображения равен "K19" поскольку фокусирующая линза 33 не перемещается.
[0148] После момента t8, когда была отправлена команда сканирующего движения, коэффициент Kcur перемещения плоскости изображения текущей позиции равен "K18" в момент времени t9, затем "K12" в момент времени t10, затем "K11" в момент времени t12.
[0149] В этом случае, согласно примеру, показанному на фиг. 16, блок 21 управления камеры принимает в момент времени t4 максимальный коэффициент Kmax перемещения плоскости изображения, равный "K12". Таким образом, в момент времени t12, принимается коэффициент Kcur перемещения плоскости изображения текущей позиции "K11" больший, чем "K12", что удовлетворяет условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции) (см. этап S601, показанный на фиг. 15), поэтому флаг нарушения устанавливается равным "1" (см. этап S605, показанный на фиг. 15).
[0150] В вышеописанном варианте осуществления, если флаг нарушения задан равным "1" на этапе S605 (если обнаружен коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции)), или если флаг нарушения задан равным "2" на этапе S606 (Если, несмотря на то, что фокусирующая линза 33, приводимая в движение от ближнего конца к концу бесконечности, коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения), невозможно обнаружить), делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3.
[0151] Если флаг нарушения задан равным "1" или "2", предпочтительно осуществлять обработку нарушения. Обработка нарушения может предпочтительно включать в себя запрещение отображения сфокусированного состояния, например, с использованием электронного видоискателя 26. Если флаг нарушения задан равным "1" или "2", то могут происходить такие нарушения, как нарушение связи, нарушение цепи и нарушение питания, что не позволяет гарантировать надежность АФ. По этой причине, предпочтительно осуществлять обработку нарушения, например, запрещение отображения сфокусированного состояния, во избежание "отображение сфокусированного состояния" с низкой достоверностью. Заметим, что если на этапе S509 флаг нарушения устанавливается равным "1" или "2" и отображение сфокусированного состояния подавляется, то отображение сфокусированного состояния не должно осуществляться, даже когда фокусирующая линза 33 достигает сфокусированной позиции на этапе S511.
Если флаг нарушения задан равным "1" или "2", то альтернативно или дополнительно к осуществлению процесса запрещения отображения сфокусированного состояния, также предпочтительно осуществлять поиск по всему диапазону, который, например, приводит в движение фокусирующую линзу 33 от ближнего конца к концу бесконечности. Осуществляя поиск по всему диапазону, можно подтвердить исчезновение причин нарушения.
Также предпочтительно осуществлять поиск по всему диапазону, так что фокусирующая линза 33 приводится в движение от ближнего конца к концу бесконечности с использованием второй скорости движения, которая достаточно ниже первой скорости движения, в качестве нормальной скорости движения. Дело в том, что достаточно низкая вторая скорость движения позволяет безопасно осуществлять поиск по всему диапазону. Дело также в том, что, если скорость движения для фокусирующей линзы 33 слишком высока для обнаружения коэффициента Kcur перемещения плоскости изображения текущей позиции, удовлетворяющего условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения), то поиск по всему диапазону с использованием достаточно низкой второй скорости движения может позволять обнаруживать такой коэффициент Kcur перемещения плоскости изображения текущей позиции.
[0152] Если флаг нарушения задан равным "1" или "2", то, альтернативно или дополнительно процессу запрещения отображения сфокусированного состояния и/или процессу осуществления поиска по всему диапазону с использованием достаточно низкой второй скорости, может осуществляться дополнительный процесс, например для запрещения как обнаружения фокуса с использованием системы обнаружения разности фаз, так и обнаружения фокуса с использованием системы обнаружения контрастности. В частности, если флаг нарушения устанавливается равным "1" или "2", в результате чего, считается, что происходит какое-то нарушение, например, нарушение связи, то вероятность того, что нельзя получить успешный результат обнаружения фокуса, высока, даже когда осуществляются обнаружение фокуса с использованием системы обнаружения разности фаз и обнаружение фокуса с использованием системы обнаружения контрастности, и, следовательно, в таком случае, можно запретить обнаружение фокуса с использованием системы обнаружения разности фаз и обнаружение фокуса с использованием системы обнаружения контрастности.
[0153] В пятом варианте осуществления, если флаг нарушения однажды установлен равным "1" или "2", то считается, что происходит какое-то нарушение, например, нарушение связи, и, таким образом, предпочтительно, чтобы флаг нарушения оставался установленным равным "1" или "2", не инициализируясь до отключения питания или смены объектива 3.
В пятом варианте осуществления, невозможно гарантировать надежность АФ, если, например, флаг нарушения устанавливается равным "1" или "2" на этапе S509, показанном на фиг. 14, и, следовательно, во избежание бессмысленного движения фокусирующей линзы 33, может осуществляться процесс для запрещения движения фокусирующей линзы 33 независимо от того, способен ли блок 21 управления камеры обнаруживать пиковое значение на этапе S510. В этом случае, предпочтительно запрещать приводить в движение фокусирующую линзу 33 до отключения питания или смены объектива 3.
Если, например, флаг нарушения устанавливается равным "1" или "2" на этапе S509, показанном на фиг. 14, то блок 21 управления камеры может осуществлять один или более дополнительных процессов, например, процесс осуществления поиска по всему диапазону с использованием достаточно низкой второй скорости движения независимо от того, можно ли обнаружить пиковое значение на этапе S510, процесс запрещения, по меньшей мере, одного из обнаружения фокуса с использованием системы обнаружения разности фаз и обнаружения фокуса с использованием системы обнаружения контрастности, процесс отключения питания камеры, и процесс отображения предупреждения о возникновения какого-то нарушения.
Невозможно гарантировать надежность АФ если, например, флаг нарушения устанавливается равным "1" или "2" на этапе S509, показанном на фиг. 14, и, таким образом, возможен дополнительный процесс, в котором блок 21 управления камеры не осуществляет фокусирующее движение на этапе S511, даже когда на этапе S510 обнаружено пиковое значение.
Шестой вариант осуществления
Теперь опишем шестой вариант осуществления согласно настоящему изобретению. В шестом варианте осуществления, описание конфигурации, аналогичной описанной выше в пятый вариант осуществления будет опущено.
[0154] Работа согласно шестому варианту осуществления, описанному ниже, может выполняться в сочетании с любой из тех, которые соответствуют вышеописанным вариантам осуществления с первого по пятый, или выполняться по одному, отдельно от тех, которые соответствуют согласно вариантам осуществления с первого по пятый.
[0155] В шестом варианте осуществления, показанном на фиг. 18, этапы S501-S504, S507, S508 и S510-S512 аналогичны соответствующим этапам, показанным на фиг. 14, поэтому подробное объяснение будет опущено. На этапе S504, производится определение, осуществлялась ли определенная операция, например, операция полунажатия спусковой кнопки (первый переключатель SW1 включен) или операция инициирования АФ, и если такая операция произведена, то процедура переходит к этапу S507, на котором блок 21 управления камеры передает команду сканирующего движения на блок 36 управления объектива, после которого выполняется этап S508, на котором блок 36 управления объектива осуществляет управление приводом для фокусирующей линзы 33 на основании команды сканирующего движения.
[0156] Затем, на этапе S705, блок 21 управления камеры запускается командой сканирующего движения (см. этап S507) на блоке 36 управления объектива для периодической передачи второго сигнала запроса на блок 36 управления объектива. Условие для передачи второго сигнала запроса на блок 36 управления объектива может базироваться, например, на триггере в моменты времени, когда блок 21 управления камеры обнаруживает, что блок 36 управления объектива действительно инициирует управление приводом для фокусирующей линзы 33, или триггере в моменты времени, когда определенный сигнал передается от блока 36 управления объектива на блок 21 управления камеры после команды сканирующего движения и т.д. Второй сигнал запроса может передаваться одновременно с командой сканирующего движения на блок 36 управления объектива.
[0157] В настоящем варианте осуществления предпочтительно, чтобы блок 21 управления камеры периодически передавал второй сигнал запроса, пока не будет выполнено условие остановки передачи второго сигнала запроса, как будет описано ниже. Период, с которым передается второй сигнал запроса, предпочтительно, может быть короче периода, с которым передается первый сигнал запроса. Например, он, предпочтительно, может составлять половину или менее периода, с которым передается первый сигнал запроса.
[0158] Затем, на этапе S706, во время периодического приема второго сигнала запроса, блок 36 управления объектива обращается к таблице (см. фиг. 6), которая хранится в памяти 37 объектива и представляет соотношение между каждой позицией линзы и коэффициентом K перемещения плоскости изображения, для получения максимального коэффициента Kmax перемещения плоскости изображения и минимального коэффициента Kmin перемещения плоскости изображения, которые соответствуют текущей позиции линзы для линзы 32 трансфокации, и периодически передает максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения на блок 21 управления камеры.
[0159] Затем, на этапе S709, блок 21 управления камеры осуществляет процесс определения нарушения, который будет описано ниже. Например, блок 21 управления камеры может периодически осуществлять определение нарушения, периодически передавая второй сигнал запроса, с использованием триггера в моменты времени, при передаче второго сигнала запроса или во временном режиме в случае приема максимального коэффициента Kmax перемещения плоскости изображения и минимального коэффициента Kmin перемещения плоскости изображения. Передача второго сигнала запроса за короткий период позволяет осуществлять определение нарушения за короткий период, и, таким образом, можно добиться успешного определения нарушения.
[0160] Затем, на этапе S510, блок 21 управления камеры определяет, можно ли обнаружить пиковое значение оценочного значения фокуса (можно ли обнаружить сфокусированную позицию). Если пиковое значение оценочного значения фокуса невозможно обнаружить, процедура возвращается к этапу S508. Если пиковое значение оценочного значения фокуса можно обнаружить, то процедура переходит к этапу S511, на котором блок 21 управления камеры останавливает периодическую передачу второго сигнала запроса. Условие остановки передачи второго сигнала запроса могут базироваться, например, на триггере в моменты времени, когда команда для фокусирующего движения передается на блок 36 управления объектива, когда фокусирующая линза 33 достигает позиции, которая соответствует пиковому значению оценочного значения фокуса, когда блок 21 управления камеры определяет, что позицию пика невозможно обнаружить, когда блок 21 управления камеры принимает решение закончить операцию сканирования, когда блок 21 управления камеры принимает решение закончить управление АФ по контрастности, или когда блок 21 управления камеры принимает решение закончить отображение с визированием по экрану и т.д. Предпочтительно, чтобы первый сигнал запроса периодически передавался начиная со времени, до начала периодической передачи второго сигнала запроса до времени, когда периодическая передача второго сигнала запроса заканчивается. Другими словами, период времени, в течение которого периодически передается второй сигнал запроса, включается в период времени, в течение которого периодически передается первый сигнал запроса.
[0161] Теперь подробно опишем процесс определения нарушения (см. этап S709 на фиг. 18) согласно фиг. 19. На фиг. 19, этапы S602-S605 и S607 аналогичны соответствующим этапам на фиг. 15, поэтому подробное объяснение будет опущено.
[0162] На этапе S801, показанном на фиг. 19, производится определение, превышает ли коэффициент Kcur перемещения плоскости изображения текущей позиции, повторно полученный посредством стационарной связи, вышеописанный максимальный коэффициент Kmax перемещения плоскости изображения, полученный на этапе S706 или меньше минимального коэффициента Kmin перемещения плоскости изображения. Если коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции) или (минимальный коэффициент Kmin перемещения плоскости изображения)>(коэффициент Kcur перемещения плоскости изображения текущей позиции), обнаружен, делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3, и процедура переходит к этапу S605, на котором флаг нарушения устанавливается равным "1" для выхода из процесса определения нарушения, после которого выполняется этап S510, показанный на фиг. 18. Если же коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции) или (минимальный коэффициент Kmin перемещения плоскости изображения)>(коэффициент Kcur перемещения плоскости изображения текущей позиции), не обнаружен, то процедура переходит к этапу S602.
[0163] Если на этапе S602 определено, что фокусирующая линза 33 приводится в движение от ближнего конца к концу бесконечности, то процедура переходит к этапу S806. На этапе S806, производится определение, можно ли, в результате приведения в движение фокусирующей линзы 33 от ближнего конца к концу бесконечности, обнаружить коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения) и (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(минимальный коэффициент Kmin перемещения плоскости изображения), из полученных посредством стационарной связи. Если, несмотря на то, что фокусирующая линза 33, приводимая в движение от ближнего конца к концу бесконечности, коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения) и (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(минимальный коэффициент Kmin перемещения плоскости изображения) невозможно обнаружить, делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3, и процедура переходит к этапу S607, на котором флаг нарушения устанавливается равным "2", для выхода из процесса определения нарушения, после которого выполняется этап S510, показанный на фиг. 18. Если на этапе S806, коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения) и (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(минимальный коэффициент Kmin перемещения плоскости изображения), можно обнаружить, то процедура выходит из процесса определения нарушения и переходит к этапу S510, показанному на фиг. 18.
[0164] Очевидно, что варианты осуществления, объясненные выше, описаны для облегчения понимания настоящего изобретения и не призваны ограничивать настоящее изобретение. Таким образом, предполагается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструкционные изменения и эквиваленты, подлежащие включению в технический объем настоящего изобретения. Кроме того, два или более из вышеописанных вариантов осуществления можно надлежащим образом комбинировать для использования.
[0165] Например, вышеописанные варианты осуществления применяют значение, вычисленное как (величина перемещения плоскости изображения)/(величина движения фокусирующей линзы 33) в качестве коэффициента K перемещения плоскости изображения, но коэффициент K перемещения плоскости изображения может представлять собой значение, вычисленное как (величина движения фокусирующей линзы 33)/(величина перемещения плоскости изображения).
Например, если значение, вычисленное как (величина перемещения плоскости изображения)/(величина движения фокусирующей линзы 33) применяется в качестве коэффициента K перемещения плоскости изображения, то, с увеличением значения (абсолютного значения), величина перемещения плоскости изображения возрастает, когда фокусирующая линза приводится в движение на определенное значение (например, 1 мм). Если значение, вычисленное как (величина движения фокусирующей линзы 33)/(величина перемещения плоскости изображения) применяется в качестве коэффициента K перемещения плоскости изображения, то с увеличением значения (абсолютного значения), величина перемещения плоскости изображения уменьшается, когда фокусирующая линза приводится в движение на определенное значение (например, 1 мм).
[0166] Согласно вышеописанным вариантам осуществления, если на этапе S601, показанном на фиг. 15, обнаружен коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции), делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3, и флаг нарушения соответственно, устанавливается равным "1" (этап S605), если же коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (максимальный коэффициент Kmax перемещения плоскости изображения)<(коэффициент Kcur перемещения плоскости изображения текущей позиции), не обнаружен, то флаг нарушения устанавливается равным "0" (процедура переходит к этапу S602), но настоящее изобретение не ограничивается вышеописанным.
Например, вышеописанную процедуру можно модифицировать таким образом, что, если на этапе S601, показанном на фиг. 15, обнаружен коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (минимальный коэффициент Kmin перемещения плоскости изображения)>(коэффициент Kcur перемещения плоскости изображения текущей позиции), делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3, и флаг нарушения соответственно, устанавливается равным "1" (этап S605), если же коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (минимальный коэффициент Kmin перемещения плоскости изображения)>(коэффициент Kcur перемещения плоскости изображения текущей позиции) не обнаружен, то флаг нарушения устанавливается равным "0" (процедура переходит к этапу S602).
[0167] Согласно вышеописанным вариантам осуществления, несмотря на то, что фокусирующая линза 33, приводимая в движение от ближнего конца к концу бесконечности, если на этапе S606, показанном на фиг. 15, коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения), невозможно обнаружить, делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3, и флаг нарушения соответственно, устанавливается равным "2" (этап S607), если же коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(максимальный коэффициент Kmax перемещения плоскости изображения), можно обнаружить, то флаг нарушения устанавливается равным "0" (процедура выходит из процесса определения нарушения), но настоящее изобретение не ограничивается вышеописанным.
Например, вышеописанную процедуру можно модифицировать таким образом, что, несмотря на то, что фокусирующая линза 33, приводимая в движение от ближнего конца к концу бесконечности, если на этапе S606, показанном на фиг. 15, коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(минимальный коэффициент Kmin перемещения плоскости изображения) невозможно обнаружить, делается вывод, что произошло какое-то нарушение, например, нарушение связи между корпусом 2 камеры и объективом 3, и флаг нарушения соответственно, устанавливается равным "2" (этап S607), если же коэффициент Kcur перемещения плоскости изображения текущей позиции, удовлетворяющий условию (коэффициент Kcur перемещения плоскости изображения текущей позиции)=(минимальный коэффициент Kmin перемещения плоскости изображения), можно обнаружить, то флаг нарушения устанавливается равным "0" (процедура выходит из процесса определения нарушения).
[0168] Согласно вышеописанным вариантам осуществления, такие нарушения, как нарушение связи, можно обнаруживать простым процессом с использованием, по меньшей мере, одного из минимального коэффициента Kmin перемещения плоскости изображения и максимального коэффициента Kmax перемещения плоскости изображения, что дает значительно положительный результат, состоящий в том, что устройство управления регулировкой фокуса можно обеспечить с высокой надежностью.
[0169] Вышеописанные варианты осуществления выполнены так, что в памяти 37 объектива хранится таблица, которая показана на фиг. 6, и представляет соотношение между каждой позицией линзы и коэффициентом K перемещения плоскости изображения, но возможна также модифицированная конфигурация, в которой таблица хранится в блоке 36 управления объектива, а не в памяти 37 объектива. Вышеописанные варианты осуществления предусматривают сохранение таблицы, которая показана на фиг. 6 и представляет соотношение между позицией линзы для линзы 32 трансфокации и позицией линзы для фокусирующей линзы 33, и коэффициентом K перемещения плоскости изображения, но допускают модификацию, в которой используется таблица, которая представляет соотношение между позицией линзы только для линзы 32 трансфокации и коэффициентом K перемещения плоскости изображения, или таблица, которая представляет соотношение между позицией линзы только для фокусирующей линзы 33 и коэффициентом K перемещения плоскости изображения. В частности, в зависимости от типа, некоторые объективы 3 отличаются тем, что, если позиция линзы для линзы 32 трансфокации одна и та же, изменение коэффициента K перемещения плоскости изображения очень мало, даже когда позиция линзы для фокусирующей линзы 33 изменяется, и в таком случае может быть полезно использовать таблицу, которая представляет соотношение между позицией линзы только для линзы 32 трансфокации и коэффициентом K перемещения плоскости изображения. Если объектив 3 состоит, по существу, из единственной фокусирующей линзы, может быть полезно использовать таблицу, которая представляет соотношение между позицией линзы только для фокусирующей линзы 33 и коэффициентом K перемещения плоскости изображения.
[0170] Вышеописанные варианты осуществления предусматривают сохранение таблицы, которая представляет соотношение между позицией линзы для линзы 32 трансфокации и позицией линзы для фокусирующей линзы 33, и коэффициентом K перемещения плоскости изображения, но может дополнительно содержать таблицу, где хранятся дополнительные данные с учетом температуры окружающей среды и положения камеры 1.
[0171] Вышеописанные варианты осуществления выполнены так, что блок 36 управления объектива передает максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения в ответ на сигнал запроса от блока 21 управления камеры, но настоящее изобретение не ограничивается такой конфигурацией. Альтернативный вариант осуществления может быть выполнен, например, так что блок 36 управления объектива передает максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения, например, в случае приема от блока 21 управления камеры сигнала для приведения в движение линзы 32 трансфокации, в случае приема от блока 21 управления камеры сигнала, который извещает, что кнопка спуска затвора была полунажата, или в случае приема от блока 21 управления камеры сигнала, который извещает, что операция регулировки фокуса была инициирована вследствие полунажатия кнопки спуска затвора, а не в ответ на сигнал запроса от блока 21 управления камеры. В дополнительном варианте осуществления, блок 36 управления объектива может быть выполнен с возможностью передачи, либо максимального коэффициента Kmax перемещения плоскости изображения, либо минимального коэффициента Kmin перемещения плоскости изображения, который представляет минимальное значение среди коэффициентов K перемещения плоскости изображения, установленных для соответствующих позиций линзы для линзы 32 трансфокации, и в этом случае блок 36 управления объектива может осуществлять передачу в ответ на запрос передачи максимального коэффициента Kmax перемещения плоскости изображения или минимального коэффициента Kmin перемещения плоскости изображения от блока 21 управления камеры, или блок 36 управления объектива также может осуществлять передачу, например, в случае приема сигнала для приведения в движение линзы 32 трансфокации даже без запроса передачи, как в вышеописанном случае.
[0172] В вышеописанных вариантах осуществления со второго по четвертый описана схема движения для уменьшения люфта, в которой, при осуществлении фокусирующего движения для фокусирующей линзы 33, фокусирующую линзу 33 заставляют однократно проходить через сфокусированную позицию и затем перемещают обратно в сфокусированную позицию, но можно также применять другую схему движения для уменьшения люфта, в которой, при осуществлении фокусирующего движения, величина люфта прибавляется к величине движения, необходимой для приведения в движение фокусирующей линзы 33 в сфокусированную позицию. В этом случае, если движение для уменьшения люфта не осуществляется, фокусирующую линзу 33 можно приводить в движение в сфокусированную позицию без добавления величины люфта.
[0173] Камера 1 согласно вышеописанным вариантам осуществления не имеет конкретных ограничений, и настоящее изобретение можно применять, например, к цифровой видеокамере, цифровой камере типа встроенного объектива, камере для мобильных телефонов, микроскопу, полевому микроскопу или другим оптическим устройствам.
[0174] Настоящее изобретение не ограничивается возможностью сохранять коэффициент K перемещения плоскости изображения в памяти 37 объектива при условии, что максимальный коэффициент Kmax перемещения плоскости изображения можно передавать. Например, максимальный коэффициент Kmax перемещения плоскости изображения можно вычислять, например, с использованием позиции линзы трансфокации, и вычисленный максимальный коэффициент Kmax перемещения плоскости изображения может передаваться в корпус 2 камеры. Аналогичным образом, минимальный коэффициент Kmin перемещения плоскости изображения можно вычислять, например, с использованием позиции линзы трансфокации, и вычисленный минимальный коэффициент Kmin перемещения плоскости изображения может передаваться в корпус 2 камеры.
Также предпочтительно, например, чтобы, если максимальный коэффициент Kmax перемещения плоскости изображения или минимальный коэффициент Kmin перемещения плоскости изображения изменяется, хотя позиция линзы трансфокации не изменяется, то принимается решение, что происходит нарушение, и надлежащий процесс может осуществляться аналогично случаю, когда флаг нарушения устанавливается равным "1" или "2", как показано на фиг. 15.
[0175] Максимальный коэффициент Kmax перемещения плоскости изображения хранящееся в памяти 37 объектива также может быть таким, как показано на фиг. 17. Минимальный коэффициент Kmin перемещения плоскости изображения также может быть задан аналогично тому, как это сделано для максимального коэффициента Kmax перемещения плоскости изображения, но подробная иллюстрация опущена.
[0176] Максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения, хранящиеся в памяти 37 объектива, могут выражаться целым числом, значением, включающим в себя дробную часть после десятичной точки, номером индекса или логарифмическим числом. Максимальный коэффициент Kmax перемещения плоскости изображения и минимальный коэффициент Kmin перемещения плоскости изображения могут выражаться десятеричным числом или двоичным числом и т.д.
[0177] Настоящее изобретение не ограничивается случаем, когда электрические контакты монтажного блока 401 корпуса 2 камеры и электрические контакты монтажного блока 402 объектива 3 соединены друг с другом, при условии, что максимальный коэффициент Kmax перемещения плоскости изображения можно передавать в корпус 2 камеры. Например, максимальный коэффициент Kmax перемещения плоскости изображения может передаваться с использованием беспроводной линии связи от объектива 3 на корпус 2 камеры.
[0178] 1… цифровая камера
2… корпус камеры
21… блок управления камеры
22… устройство формирования изображения
221… пиксели формирования изображения
222a, 222b… пиксели обнаружения фокуса
3… объектив
32… линза трансфокации
33… фокусирующая линза
36… блок управления объектива
37… память объектива.
Реферат
Сменный объектив присоединен к корпусу камеры и содержит оптическую систему, содержащую линзу регулировки фокуса, привод для ее движения, блок обнаружения для обнаружения позиции линзы регулировки фокуса, и передатчик, выполненный с возможностью передачи первого значения и второго значения. Первое значение изменяется в соответствии с позицией линзы регулировки фокуса и представляет собой коэффициент перемещения плоскости изображения, соответствующий величине перемещения плоскости изображения относительно величины перемещения линзы регулировки фокуса в позиции линзы регулировки фокуса. Второе значение представляет собой коэффициент перемещения плоскости изображения, при этом величина перемещения плоскости изображения относительно величины перемещения линзы регулировки фокуса становится минимальной в диапазоне движения линзы регулировки фокуса. Передатчик передает первое значение после приема первого сигнала от корпуса камеры и передает второе значение после приема второго сигнала. Технический результат - обеспечение отслеживания состояния регулировки фокуса оптической системы. 4 н. и 6 з.п. ф-лы, 19 ил.
Комментарии