Способ создания заданного уровня вакуума в системе доения и компьютерные программные продукты - RU2461186C2
Код документа: RU2461186C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к области регулирования вакуума применительно к машинному доению. Конкретно, изобретение относится к способу создания необходимого уровня вакуума в системе доения. Изобретение также относится к компьютерным программным продуктам для выполнения способа.
Уровень техники изобретения
На сегодня, значительная часть операций, связанных с доением, автоматизирована, и многие фермеры применяют автоматизированную систему доения для доения своих животных молочных пород. Предпосылкой для выполнения такой автоматизации является система регулирования вакуума для создания и регулирования вакуума в системе доения.
В целом, существуют различные проблемы, которые необходимо принимать в расчет при разработке системы регулирования вакуума для системы доения. Избыточный уровень вакуума может повредить животным, подлежащим доению, в то время как, с другой стороны, слишком низкий уровень вакуума может замедлить операции, связанные с доением. Дополнительно, во время определенных операций желательно поддерживать уровень вакуума системы доения на постоянном уровне, без ненужных колебаний уровня вакуума.
Желательно поддерживать потребление энергии на самом низком уровне, возможном в системе доения. Система регулирования вакуума обычной молочной фермы потребляет большую часть общего количества используемого электричества, и система регулирования вакуума, таким образом, должна быть сделана эффективной насколько возможно.
Система регулирования вакуума обычно содержит вакуумный насос, который выбирают таким образом, чтобы можно было удалять воздух из системы доения для соблюдения необходимого максимального уровня вакуума и требуемого количества воздуха в системе доения. Если для соблюдения требований недостаточно одного вакуумного насоса, то могут быть установлены два или более вакуумных насоса. Вакуумные насосы могут быть установлены для обеспечения вакуума в различных частях системы доения. Система регулирования вакуума, обычно, дополнительно содержит устройство управления для регулирования скорости вакуумных насосов и, таким образом, количества воздуха, подлежащего удалению из системы доения и/или для регулирования клапанов для поддержания уровня вакуума на желательном уровне.
Пример системы регулирования вакуума, содержащей вакуумные насосы с регулируемой скоростью, раскрыт в международной патентной публикации WO 2006/006906, переуступленной автору настоящей заявки. Если потребность в вакууме в системе доения такая, что недостаточно мощности первого вакуумного насоса, то скорость первого вакуумного насоса устанавливают на фиксированные обороты, в то время как запускают второй вакуумный насос. Уровнем вакуума в системе доения управляют, таким образом, посредством скорости второго вакуумного насоса.
Существуют трудности, связанные с управлением двумя или более вакуумными насосами одновременно. Например, может быть затруднительно поддерживать уровень вакуума на постоянном уровне. Особенно в случае, когда количество воздуха, который необходимо удалить из системы доения, очень низкое и вакуумные насосы вследствие этого работают на низкой скорости. Существует также опасность перегревания вакуумных насосов.
Ввиду сказанного выше было бы желательно предоставить улучшенный способ регулирования уровня вакуума в системе доения.
Сущность изобретения
Главная цель изобретения состоит в том, чтобы предоставить способ создания и регулирования необходимого уровня вакуума в системе доения.
Еще одна цель изобретения состоит в том, чтобы предоставить способ создания и регулирования уровня вакуума, предоставляя постоянный уровень вакуума в системе доения, без колебаний вакуума, который может вызывать дискомфорт у животных молочной породы.
Еще одна другая цель изобретения состоит в том, чтобы предоставить способ создания и регулирования уровня вакуума, где потребление энергии для создания необходимого уровня вакуума в системе доения должно поддерживаться на минимальном уровне.
Еще одна другая цель изобретения состоит в том, чтобы предоставить гибкий способ создания и регулирования уровня вакуума, например гибкий в отношении количества вакуумных насосов и легкости содержания и обслуживания вакуумных насосов.
Данные цели, среди других, достигаются посредством способа создания необходимого уровня вакуума в системе доения и посредством компьютерных программных продуктов, как заявлено в независимых пунктах формулы изобретения.
В соответствии с изобретением предоставлен способ создания необходимого уровня вакуума в системе доения, содержащий, по меньшей мере, два вакуумных насоса с регулируемой скоростью. Способ содержит стадии: применения первого вакуумного насоса с регулируемой скоростью для создания необходимого уровня вакуума в системе доения; мониторинга потребности уровня вакуума в системе доения, а когда потребность уровня вакуума системы доения такая, что скорость первого вакуумного насоса с регулируемой скоростью достигает первого предельного значения скорости, то: запуска второго вакуумного насоса с регулируемой скоростью и работы первого и второго вакуумных насосов с регулируемой скоростью параллельно для создания необходимого уровня вакуума. В настоящей заявке использовать параллельно два или более вакуумных насоса с регулируемой скоростью означает, что они все управляются от одного и того же управляющего сигнала. Блок управления предоставляет один и тот же управляющий сигнал на все вакуумные насосы. Если вакуумные насосы идентичны, то это будет, в свою очередь, означать, что они работают, по существу, с равной скоростью или скоростью вращения. В соответствии с изобретением нет необходимости превышать размеры мощности одного насоса с регулируемой скоростью для того, чтобы была возможность предоставить необходимый уровень вакуума, когда в систему доения поступает много воздуха. В соответствии с изобретением применяется количество вакуумных насосов с регулируемой скоростью, которое фактически необходимо для конкретной операции доения. Дополнительно, легко осуществлять техническое обслуживание двух или более вакуумных насосов системы доения, в которой применяется способ в соответствии с изобретением. Например, любой вакуумный насос может быть выведен из эксплуатации для того, чтобы его обслужить без прерывания или оказания существенного влияния на непрерывность операций доения.
В соответствии с вариантом осуществления изобретения способ содержит дополнительную стадию понижения скорости второго вакуумного насоса с регулируемой скоростью до нуля, когда потребность в вакууме в системе доения такая, что скорость первого и/или второго вакуумных насосов с регулируемой скоростью опускается ниже предельного значения скорости. Посредством данного признака, нет необходимости в использовании двух или более вакуумных насосов с регулируемой скоростью на нижнем пределе своей мощности. Например, как только потребность в вакууме становится такой, что достаточно одного вакуумного насоса для соблюдения потребности, то другой (другие) выключаются один за другим, до тех пор, пока необходимые вакуумные насосы не будут работать на подходящем уровне мощности. В качестве альтернативы, когда, например, скорость, равная 80% максимальной скорости для одного вакуумного насоса, достаточна для соблюдения потребности в вакууме, то другой (другие) могут быть выключены, и работает только один вакуумный насос. Это обеспечивает сохранение энергии, поскольку является более энергозатратным использовать несколько вакуумных насосов на нижнем уровне своей мощности, чем использование одного вакуумного насоса на верхнем уровне его мощности. Дополнительно, вакуумные насосы все время используют при наиболее оптимальной скорости, продлевая продолжительность их службы.
Дополнительные варианты осуществления определены в подчиненных пунктах формулы изобретения.
В соответствии с дополнительным аспектом изобретения предоставлены компьютерные программные продукты, посредством чего достигаются преимущества, подобные описанным выше. Конкретно, изобретение может, таким образом, легко быть реализовано в уже существующих системах доения.
Дополнительные характеристики изобретения и его преимущества будут очевидны из подробного описания вариантов осуществления настоящего изобретения, приводимых далее и прилагаемых фигур, которые даны единственно ради иллюстрирования.
Краткое описание чертежей
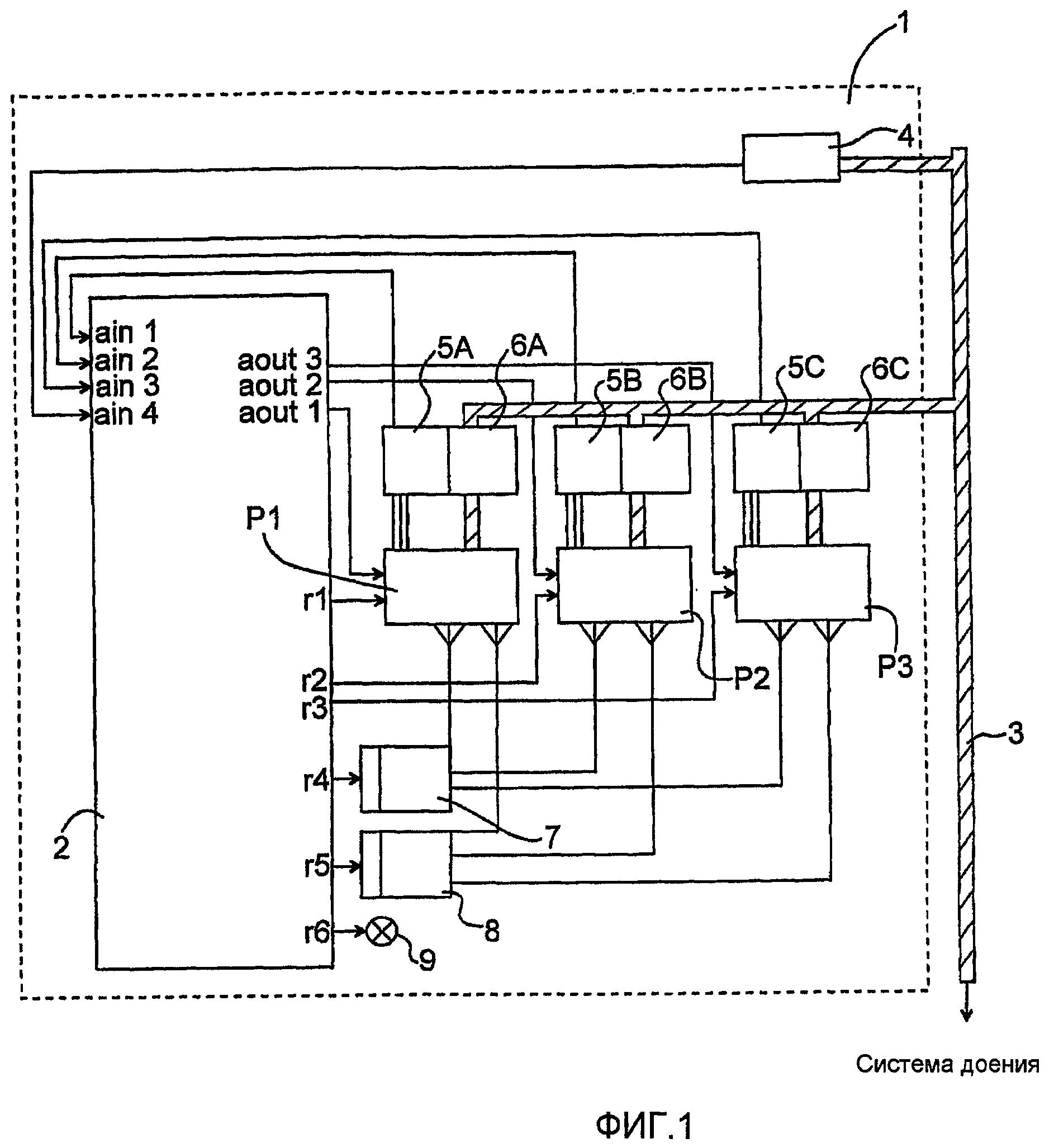
Фиг.1 представляет собой функциональную схему примера осуществления настоящее изобретения.
Фиг.2 представляет собой блок-схему стадий, включенных в способ в соответствии с настоящим изобретением.
Подробное описание вариантов осуществления
Изобретение описано в дальнейшем для трех вакуумных насосов с регулируемой скоростью, но необходимо отметить, что количество вакуумных насосов с регулируемой скоростью может быть расширено до любого количества вакуумных насосов с регулируемой скоростью. Однако, как станет очевидно, для способа, пригодного к применению, должно быть, по меньшей мере, два вакуумных насоса с регулируемой скоростью. Количество вакуумных насосов с регулируемой скоростью главным образом зависит от размера системы доения, необходимого уровня вакуума и количества воздуха, который может попасть (просочиться) в систему доения, например, во время различных операций доения.
Настоящее изобретение теперь будет описано с первой ссылкой на фиг.1. Фиг.1 схематично иллюстрирует различные части системы регулирования вакуума 1, подходящей для создания и регулирования уровня вакуума в системе доения. Система регулирования вакуума 1 содержит три вакуумных насоса с регулируемой скоростью Pl, P2, P3, которые все могут использоваться с разными скоростями, то есть с разным количеством оборотов в минуту (об/мин). Соответствующая скорость вакуумных насосов с регулируемой скоростью P1, P2, P3 зависит от потребности в вакууме и количестве воздуха, попавшего в систему доения. Система регулирования вакуума 1 дополнительно содержит вакуумные трубопроводы 3, присоединенные к вакуумным насосам с регулируемой скоростью P1, P2, P3, к датчику вакуума 4 и к различным частям системы доения, использующим вакуум (не показанным).
Для управления системой регулирования вакуума 1 сконфигурирован блок управления 2. Блок управления содержит регулировочный узел, например ПИ-регулятор. Регулятор подает вакуумным насосам с регулируемой скоростью P1, P2, P3 управляющий сигнал для регулирования их скоростей. Блок управления 2 сравнивает входной сигнал, который обозначает актуальный уровень вакуума в вакуумной системе, с желательным значением, а регулятор регулирует скорости соответствующим образом.
Блок управления 2 содержит ряд входов и ряд выходов. На фигуре показаны четыре выхода аналоговых сигналов ain1, ain2 , ain3, ain4, три входа аналоговых сигналов aoutl, aout2, aout 3 и шесть выходов ретранслированных сигналов r1, r2, r3, r4, r5, r6. Необходимо отметить, что количество входов и выходов можно изменять в соответствии с необходимостью посредством простого добавления или удаления выходов и входов.
Входы аналоговых сигналов ain1, ain2 и ain3 подсоединены к температурным датчикам 5A, 5B и 5C. Температурные датчики 5A, 5B, 5C являются необязательными и сконфигурированы для измерения температуры соответствующего вакуумного насоса с регулируемой скоростью P1, P2, P3. Если температура определенного вакуумного насоса с регулируемой скоростью превышает установленное пороговое значение, может быть использован соответствующий выход ретранслированного сигнала для отключения данного вакуумного насоса.
Четвертый вход аналогового сигнала ain4, обозначаемый далее как сигнал управления вакуумом ain4, присоединен к датчику вакуума 4. Датчик вакуума 4 сконфигурирован для измерения уровня вакуума в системе доения и для передачи вакуумного управляющего сигнала на блок управления 2, указывая данный уровень вакуума. Сигнал управления вакуумом подается на блок управления 2 на вход ain4.
Выходы аналоговых сигналов aout1, aout2, aout3 сконфигурированы для подачи сигнала на каждый соответствующий вакуумный насос с регулируемой скоростью P1, P2, P3 для регулирования их соответствующих скоростей. Посылаемый аналоговый сигнал зависит от аналогового вакуумного управляющего сигнала, получаемого от датчика вакуума 4. Конкретно, скорость вакуумных насосов с регулируемой скоростью P1, P2, P3 зависит от потребности в вакууме в системе доения (будет описано более подробно позднее); если датчик вакуума 4 показывает слишком низкий уровень, скорость вакуумных насосов с регулируемой скоростью P1, P2, P3 должна быть повышена, а если скорость вакуумных насосов с регулируемой скоростью P1, P2, P3 обеспечивает уровень вакуума, который является очень высоким, то скорость одного или более вакуумных насосов с регулируемой скоростью P1, P2, P3 необходимо понизить. Выходы аналоговых сигналов aout1, aout2 и aout3 являются входом на каждый соответствующий вакуумный насос с регулируемой скоростью и могут представлять собой сигнал, имеющий значение в диапазоне, равном, например, 0-10 В, причем такие сигналы затем интерпретируются как конкретная команда изменения скорости в зависимости от их значений.
Три из выходов ретранслируемых сигналов r1, r2, r3 сконфигурированы для подачи сигналов на соответствующий один из вакуумных насосов с регулируемой скоростью P1, P2, P3 для их включения или выключения соответственно.
Выход ретранслированного сигнала r4 сконфигурирован для запуска процесса очистки. Необходимо отметить, что такой процесс очистки применим не для всех типов вакуумных насосов, но, главным образом, относится к лопастным вакуумным насосам. Клапан моющей воды 7 управляется посредством ретранслированного сигнала r4. Предпочтительно, чтобы очистка вакуумных насосов с регулируемой скоростью инициировалась автоматически спустя определенное количество часов функционирования, хотя, в качестве альтернативы, процесс очистки может инициироваться вручную. Если используется несколько вакуумных насосов, предпочтительно, чтобы все они очищались в одно и то же время, так как все насосы должны иметь приблизительно один и тот же период использования в соответствии с мультинасосной схемой включения, описанной позднее.
Предпочтительно, чтобы во время моющей фазы все насосы работали для того, чтобы их очистить. Вслед за этим будет заливаться вода перед началом периода продувки или во время него, т.е. периода, во время которого в вакуумную систему подается воздух и вакуумные насосы работают тяжелее. Вакуумные насосы затем высушивают во время окончания периода продувки. Период времени, в течение которого будет подаваться вода, может быть регулируемым параметром, в этом случае данный параметр должен быть введен в блок управления 2. Период времени, в течение которого будет подаваться вода, может составлять, например, 0,1-0,5 литров в течение 10 секунд, однако это зависит от размера насоса.
Выход ретранслированного сигнала r5 сконфигурирован для открывания клапана для того, чтобы инициировать автоматический процесс распыления после очистки. Такой процесс распыления мог бы, например, включать в себя распыление антикоррозийного или смазывающего распыляемого материала после выполнения цикла очистки. В блоке управления 2 может быть установлен параметр для установки времени распыления, например, 0,1 секунды.
Каждый вакуумный насос с регулируемой скоростью P1, P2, P3 имеет присоединенный к нему соответствующий обратный клапан 6A, 6B, 6C. Обратные клапаны 6A, 6B, 6C предоставлены, например, для того, чтобы предотвратить просачивание воздуха в случае, когда демонтируют один из вакуумных насосов с регулируемой скоростью, например для обслуживания, или для предотвращения вращения вакуумных насосов с регулируемой скоростью, когда они не используются.
Блок управления 2 может также содержать средство слежения за продолжительностью непрерывной работы каждого вакуумного насоса с регулируемой скоростью. В функции, обозначаемой далее как мультинасосная схема включения, очередность порядка запуска вакуумных насосов с регулируемой скоростью изменяется в зависимости от их соответствующих продолжительностей непрерывной работы. Например, если первый вакуумный насос с регулируемой скоростью Pl был запущен сперва в течение X часов (например, 100 часов) с включением питания, то порядок запуска может быть изменен таким образом, чтобы второй вакуумный насос с регулируемой скоростью P2 запускался первым, а первый вакуумный насос с регулируемой скоростью P1 запускался последним. Посредством данного признака мультинасосной схемы включения вакуумные насосы с регулируемой скоростью работают приблизительно одинаково. Принцип мультинасосной схемы включения может быть расширен до любого количества вакуумных насосов с регулируемой скоростью.
Также может присутствовать внешний световой предупредительный сигнал, обозначенный на фигуре под ссылочным номером 9. Если имеет место неисправность в работе, требующая внимания пользователя, то мигающий свет может быть преимуществом, так как пользователь легко может это увидеть. Блок управления 2 вследствие этого может содержать реле для включения такого светового предупредительного сигнала, когда необходимо.
Блок управления 2 может дополнительно содержать средство для выключения вакуумного насоса с регулируемой скоростью для обслуживания, в то время как другой один или более вакуумный насос (вакуумные насосы) с регулируемой скоростью остается/остаются задействованными. Блок управления 2, кроме того, может содержать меню, посредством которого выбранный вакуумный насос с регулируемой скоростью переводится в режим обслуживания.
Дополнительно, блок управления 2 предпочтительно включает дисплей для предоставления актуальной информации пользователю, например о текущем уровне вакуума, установках, сообщениях об ошибках, характеристиках вакуумных насосов, таких как максимальная скорость или продолжительность непрерывной работы и т.д.
Конкретные электронные компоненты для выполнения различных функций не описаны выше, так как они будут очевидны квалифицированным специалистам в данной области. Например, квалифицированный специалист в данной области будет знать, как ввести в работу реле управления выхода сигналов и обработки сигналов.
В способе в соответствии с изобретением первый вакуумный насос с регулируемой скоростью P1 запускают и используют для создания желательного уровня вакуума в системе доения. Уровень вакуума в системе доения все время контролируют посредством датчика вакуума 4.
Когда первый вакуумный насос с регулируемой скоростью P1 достигает определенной скорости, означающей первое пороговое значение скорости Th1, которое, например, может составлять 80% от его максимальной скорости, то запускается второй вакуумный насос с регулируемой скоростью P2 посредством ретранслированного сигнала, посылаемого выходом ретранслированного сигнала r2. Скорость второго вакуумного насоса с регулируемой скоростью P2 нарастает на, например, приблизительно 10-20 Гц в секунду. В предпочтительном варианте осуществления, скорость второго вакуумного насоса с регулируемой скоростью P2 нарастает, а скорость первого вакуумного насоса с регулируемой скоростью P1, соответственно, понижается. Когда два вакуумных насоса с регулируемой скоростью P1, P2 имеют одну и ту же скорость, причем такая скорость является достаточной для соблюдения потребности в вакууме, то аналоговые сигналы aout1 и aout2 станут одинаковыми для обоих вакуумных насосов с регулируемой скоростью. Тогда система регулирования вакуума 1 будет работать, имея два одновременно работающих вакуумных насоса с регулируемой скоростью, использующихся совместно. Первый и второй вакуумные насосы с регулируемой скоростью P1 и P2 работают совместно, что означает, что оба вакуумных насоса с регулируемой скоростью получают один и тот же аналоговый сигнал. Сигнал от датчика вакуума 4 (вход на ain4) используется для управления обоими вакуумными насосами с регулируемой скоростью.
Когда скорость вакуумных насосов с регулируемой скоростью P1 и P2 достигает определенного предела скорости, второго порогового значения скорости Th2, которое снова может составлять, например, 80% от их максимальной скорости, то запускается третий вакуумный насос с регулируемой скоростью P3 и выполняется такая же процедура, как когда запускался второй вакуумный насос с регулируемой скоростью P2. Вакуумный насос с регулируемой скоростью P3 ускоряется, а вакуумные насосы с регулируемой скоростью P1 и P2 замедляются до тех пор, пока все вакуумные насосы не будут иметь одну и ту же скорость и совместно управляться посредством одного и того же управляющего сигнала, подаваемого блоком управления 2.
Таким же образом, когда определено, что потребность в вакууме в системе доения такова, что нет необходимости использовать все три или даже два вакуумных насоса с регулируемой скоростью параллельно, то они выключаются. Определение того, когда потребность в вакууме такова, что один вакуумный насос с регулируемой скоростью может быть выключен, может, например, происходить, когда предел скорости вакуумных насосов с регулируемой скоростью опускается ниже 20% от их максимальной скорости. Конкретно, допуская, что все три вакуумных насоса с регулируемой скоростью P1, P2, P3 используются параллельно, когда их скорость опускается ниже определенного предела скорости, например 20% максимальной скорости, то третий вакуумный насос с регулируемой скоростью P3 замедляется и останавливается. Тогда скорость первого и второго насосов с регулируемой скоростью P1 и P2, соответственно, повышается. Данная процедура повторяется, когда потребность в вакууме такова, что достаточно первого вакуумного насоса с регулируемой скоростью Pl для предоставления необходимого вакуума.
Критерием, используемым для определения, когда останавливать вакуумный насос, может являться показатель предела скорости, например определенное процентное значение от его максимальной скорости, как описано выше. Вакуумный насос, в котором нет более необходимости, может быть остановлен немедленно, или может быть выбран критерий, такой что, когда два вакуумных насоса используются на 30% от своей максимальной мощности в течение 10 секунд, то один из них будет остановлен. Другой критерий для определения, когда останавливать вакуумный насос, может быть использован, например, когда скорость насоса, каждого вакуумного насоса понижается до 30-50%. Их применяют также для принятия решения, когда запускать дополнительный вакуумный насос.
Дополнительные насосы с регулируемой скоростью могут быть добавлены по мере необходимости. Процедура для запуска и остановки n-го вакуумного насоса с регулируемой скоростью проделывается по аналогии с описанными выше процедурами.
В описанном выше варианте осуществления, предполагается, что скорости разных вакуумных насосов с регулируемой скоростью P1, P2, P3 будут идентичными, когда все три из них необходимы для удовлетворения потребности в вакууме в системе доения; то есть, когда они работают параллельно. Однако сигнал управления вакуумом ain4 от датчика вакуума 4, каковой управляющий сигнал определяет потребность в вакууме для соответствующих вакуумных насосов с регулируемой скоростью P1, P2, P3, может быть интерпретирован по-разному разными вакуумными насосами с регулируемой скоростью P1, P2, P3. Например, сигнал управления вакуумом ain4 может представлять собой описанный выше аналоговый входной сигнал, имеющий значение в интервале, равном 0-10 В. Однако вакуумный насос с регулируемой скоростью P1 может интерпретировать сигнал, равный 5 В, таким образом, чтобы установить свою скорость на количество оборотов в минуту x, в то время как вакуумный насос с регулируемой скоростью P2 интерпретирует тот же сигнал таким образом, чтобы установить свою скорость на количество оборотов в минуту y, где x≠y. Таким образом, несмотря на то что параллельное использование основано на одном и том же сигнале регулирования вакуума (ain4), нет необходимости, чтобы их скорости были равны, но скорости обоих вакуумных насосов с регулируемой скоростью изменяются вверх или вниз в зависимости от потребностей в вакууме.
Первое пороговое значение скорости Th1 может быть установлено как определенное процентное значение от максимальной скорости первого вакуумного насоса с регулируемой скоростью, например 80%, 90% или 95% от его максимальной мощности. Так же как второе пороговое значение скорости Th2, которое является скоростью первого и второго вакуумных насосов с регулируемой скоростью, когда они используются совместно, может быть установлено как определенное процентное значение от их максимальной скорости, например 75-90%. Необходимо отметить, что пороговые значения могут быть равны или могут отличаться. Дополнительно, необходимо отметить, что указанные выше пределы скоростей, касающиеся того, когда запускать и выключать вакуумный насос с регулируемой скоростью, являются только лишь примерными. Пределы скоростей могут быть изменены в соответствии с необходимостью, например, находиться в интервале, равном 60-95%, или в интервале 60-99% от своих максимальных скоростей.
Скорость вакуумного насоса с регулируемой скоростью может быть переведена в мощность вакуумного насоса с регулируемой скоростью.
Скорость, с которой вакуумный насос с регулируемой скоростью ускоряется или замедляется, может находиться, например, в диапазоне, равном 5-40 Гц в секунду. Скорость повышения может отличаться от скорости понижения; ускорение может, например, происходить шагами, равными 20 Гц/с, а замедление шагами, равными 14 Гц/с.
Каждый насос с регулируемой скоростью может содержать регулятор частоты, обеспечивая частоту для регулирования скорости насоса от входного постоянного напряжения. Таким образом, насос содержит частотно-регулируемый двигатель. Регулятор частоты также приспособлен обеспечивать соответствующим образом изменение скоростей насоса вверх и вниз. В качестве альтернативы, изменение обеспечивает регулятор вакуумного насоса 2.
В предпочтительном варианте осуществления, все вакуумные насосы являются идентичными по размеру и типу. Однако посредством способа, описанного выше, также могут быть управляемыми различные типы вакуумных насосов. Примеры вакуумных насосов, которые могут быть использованы при осуществлении настоящего изобретения, содержат объемный вакуумный насос (DVP), такой как лопастной вакуумный насос (LVP), пластинчатый насос или спиральный насос, хотя также могут быть использованы другие вакуумные насосы.
Фиг.2 представляет собой блок-схему, суммирующую стадии способа, в соответствии с изобретением. Способ 100 включает первую стадию, стадию 110, использования первого вакуумного насоса с регулируемой скоростью P1 для создания необходимого уровня вакуума в системе доения. На второй стадии, стадии 120, контролируется уровень вакуума в системе доения, например, посредством датчика вакуума 4 совместно с блоком управления 2. Когда уровень вакуума системы доения таков, что скорость первого вакуумного насоса с регулируемой скоростью Pl достигает первого порогового значения скорости, то инициируются третья и четвертая стадии способа, стадия 130 и стадия 140. На стадии 130 запускается второй вакуумный насос с регулируемой скоростью P2. На стадии 140 первый и второй вакуумные насосы с регулируемой скоростью Pl и P2 работают параллельно для создания необходимого уровня вакуума в системе доения.
Изобретение также относится к компьютерному программному продукту, который может загружаться в оперативную память компьютера, который используется для управления вакуумными насосами системы регулирования вакуума. Компьютерный программный продукт содержит кодовые участки программы для выполнения описанного выше способа, когда на компьютере запущен компьютерный программный продукт. Изобретение, таким образом, легко внедряется в уже существующие системы доения, имеющие, по меньшей мере, два вакуумных насоса с регулируемой скоростью.
Компьютерный программный продукт, в качестве альтернативы, может быть сохранен на компьютерной считываемой запоминающей среде, например компактном диске. Компьютерная считываемая запоминающая среда содержит компьютерный считываемый текст программы, предназначенной для того, чтобы дать команду компьютеру молочной фермы, выполнять способ, описанный выше.
В описании используется термин "потребность в вакууме". Необходимо отметить, что потребность в вакууме (нужда в вакууме) в системе доения находится в зависимости от количества воздуха, попадающего в систему доения, и воздуха, вытекающего из системы доения. Количество воздуха, выпускаемого/впускаемого в систему доения, является разным в разные моменты времени, например, в зависимости от типа выполняемой операции доения. Вследствие этого для того, чтобы поддерживать определенный желательный уровень вакуума, вакуумные насосы должны работать с различными скоростями в разное время, в зависимости от количества удаляемого в разное время воздуха для обеспечения данного желательного уровня вакуума.
Термин "использование вакуумных насосов параллельно" относится к случаю, когда два или более вакуумных насоса получают один и тот же управляющий сигнал от блока управления 2 и их скорость регулируется в соответствии с данным управляющим сигналом. Когда вакуумный насос добавляют (ускоряют) или удаляют (замедляют), вакуумный насос, который замедляется или ускоряется, не функционирует параллельно с одним другим или более вакуумным насосом (насосами). Например, когда необходим второй вакуумный насос, в зависимости от управляющего сигнала регулировочного узла блока управления 2 работает только первый вакуумный насос. Когда второй вакуумный насос ускоряется, первый вакуумный насос замедляется и затем они оба работают от одного и того же управляющего сигнала, т.е. работают параллельно.
Итак, в соответствии с изобретением нет необходимости превышать размеры мощности одного насоса с регулируемой скоростью для того, чтобы была возможность обеспечить необходимый уровень вакуума при максимальном количестве воздуха, поступаемого в систему доения, и нет необходимости в использовании двух или более вакуумных насосов с регулируемой скоростью на нижнем пределе их мощности. В соответствии с изобретением используется количество вакуумных насосов с регулируемой скоростью, которое является фактически необходимым в конкретной операции доения. Использование двух или более вакуумных насосов, работающих, например, в половину своей максимальной мощности, является более энергозатратным, чем наличие одного вакуумного насоса, работающего на своей максимальной мощности. Изобретение, таким образом, предоставляет энергосберегающее решение.
Реферат
Изобретение относится к сельскому хозяйству. Предложенный способ создания заданного уровня вакуума в системе доения, которая содержит, по меньшей мере, два вакуумных насоса с регулируемой скоростью, заключается в следующем. Согласно способу используют первый вакуумный насос с регулируемой скоростью для создания заданного уровня вакуума в системе доения, контролируют потребность в уровне вакуума в системе доения и, когда потребность в уровне вакуума системы доения такова, что скорость первого вакуумного насоса с регулируемой скоростью достигает первого предельного значения скорости, запускают второй вакуумный насос с регулируемой скоростью, и используют первый и второй вакуумные насосы с регулируемой скоростью параллельно для создания заданного уровня вакуума. Изобретение также относится к компьютерно-читаемым носителям данных для осуществления указанного способа и управления вакуумной системой молочной фермы для выполнения этого способа. Изобретение обеспечивает поддержание постоянного уровня вакуума в системе без колебаний, вызывающих дискомфорт у молочных животных, снижение потребления энергии, легкость содержания и обслуживания вакуумных насосов. 3 н. и 15 з.п. ф-лы, 2 ил.
Комментарии