Нейрофизиологический мониторинг для проспективного стробирования движений в радиологической визуализации - RU2695250C2
Код документа: RU2695250C2
Чертежи


Описание
УРОВЕНЬ ТЕХНИКИ
[0001] Сбор медицинских изображений для томографической визуализации, например CT или MRI, может происходить в течение длительного периода времен (например, нескольких секунд или минут). Данные собираются в течение некоторого периода времени и реконструируются для создания конечного объема изображений. Движение пациента в течение периода визуализации, однако, может приводить к искажению части данных, поскольку данные, собранные при нахождении пациента в другом физическом положении, не могут объединяться с остальными данными. Таким образом, движение в течение периода визуализации сильно усложняет реконструкцию изображения.
[0002] Современные алгоритмы введения поправок на движение и компенсации движения имеют ретроспективный характер. Например, искаженные движением данные могут быть отброшены в процессе конечной реконструкции изображения. Однако в процессе визуализации трудно определить, сколько собрано искаженных движением данных. Таким образом, характеристики конечного изображения (например, отношение сигнал-шум) могут отличаться среди в остальном идентичных сканов, поскольку в реконструкции изображения может использоваться различное количество данных. Кроме того, для процессов медицинской визуализации, требующих ионизирующего излучения (например, при CT-визуализации), желательно ограничить радиационное воздействие на пациента и операторов, находящихся вблизи системы визуализации. Сбор искаженных данных, которые, в конечном счете, будут отброшены, однако, по-прежнему подвергает пациента излучению без какой-либо дополнительной пользы. Устройства, использующие способы компенсации движения для детектирования движения в процессе самого сбора, по-прежнему страдают теми же недостатками, поскольку по-прежнему сначала требуется собрать данные изображений.
В публикации WO 2009/060348 A1 раскрыт подход к стробированию и коррекции циклических движений в MR-PET исследованиях. При подготовке к сбору данных PET-изображений осуществляется построение моделей движений субъекта на основе мониторинга физиологических сигналов, при этом MR-данные собираются и используются для улучшения PET-визуализации. Мониторинг физиологических сигналов также используется в процессе PET-визуализации, при этом собранные MR-данные используются для проспективного или ретроспективного стробирования сбора PET-изображений либо в реконструкции PET-изображений для совершенствования коррекции/визуализации.
В публикации WO 03/003796 A1 раскрыты способ и система для детектирования и оценки с возможностью прогнозирования регулярных циклов физиологической активности и движений. Другой раскрытый аспект касается предсказуемого приведения в действие компонентов системы стробирования. Еще один раскрытый аспект касается стробирования лучевой терапии на основе фазы физиологической активности.
В патенте США 5271055 раскрыты способы уменьшения артефактов, вызванных движением, в системе проекционной визуализации. Система медицинской визуализации имеет источник рентгеновских лучей, а также детектор, формирующий электрический сигнал в ответ на детектирование рентгеновских лучей. Сигнал, генерируемый детектором в интервале времени сбора данных, используется для построения изображения терапевтического пациента, которое может содержать артефакты, вызванные движением пациента. Формируется сигнал, свидетельствующий о движении, который имеет период покоя, в течение которого движение минимально. Первый участок этого сигнала выбирается так, что, если сбор изображений начинается в конце первого участка, интервал сбора данных приходится на период покоя. Этот первый участок первоначально используется в качестве референсного участка сигнала. Затем последующие участки сигнала сравниваются с референсным участком сигнала для создания описателя степени схожести. Сбор изображений начинается, когда описатель указывает на наличие заданной степени схожести, превышающей определенное пороговое значение. Периодически последующий участок сигнала объединяется с предшествующим референсным участком сигнала для создания скорректированного референсного участка сигнала, который в дальнейшем используется на этапе сравнения.
В заявке США 2005/082491 A1 раскрыт детектор излучения с множеством энергетических уровней.
В заявке США 2012/0310053 раскрыты медицинское оборудование и способ управления имеющимся в нем медицинским устройством.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Способ мониторинга движения в процессе медицинской визуализации. Способ включает в себя инициацию сбора данных изображения, измерение физиологических сигналов пациента, в том числе нейрофизиологического сигнала, генерирование сигнала прогнозирования путем интегрирования физиологических сигналов, определение вероятности возникновения движения пациента на основе сигнала прогнозирования, а также изменение сбора данных изображения, если прогнозируется, что движение пациента произойдет с высокой долей вероятности.
[0004] Система мониторинга движения в процессе медицинской визуализации. Система включает в себя систему мониторинга, измеряющую физиологические сигналы пациента, в том числе нейрофизиологический сигнал, а также процессор, инициирующий сбор данных изображения, генерирующий сигнал прогнозирования путем интегрирования физиологических сигналов, определяющий вероятность возникновения движения пациента на основе сигнала прогнозирования, а также изменяющий сбор данных изображения, если прогнозируется, что движение пациента произойдет с высокой долей вероятности.
[0005] Энергонезависимый машиночитаемый носитель, содержащий набор инструкций, выполняемых процессором. Набор инструкций выполнен с возможностью инициации сбора данных изображения, измерения физиологических сигналов пациента, в том числе нейрофизиологического сигнала, генерирования сигнала прогнозирования путем интегрирования физиологических сигналов, определения вероятности возникновения движения пациента на основе сигнала прогнозирования, а также изменения сбора данных изображения, если прогнозируется, что движение пациента произойдет с высокой долей вероятности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
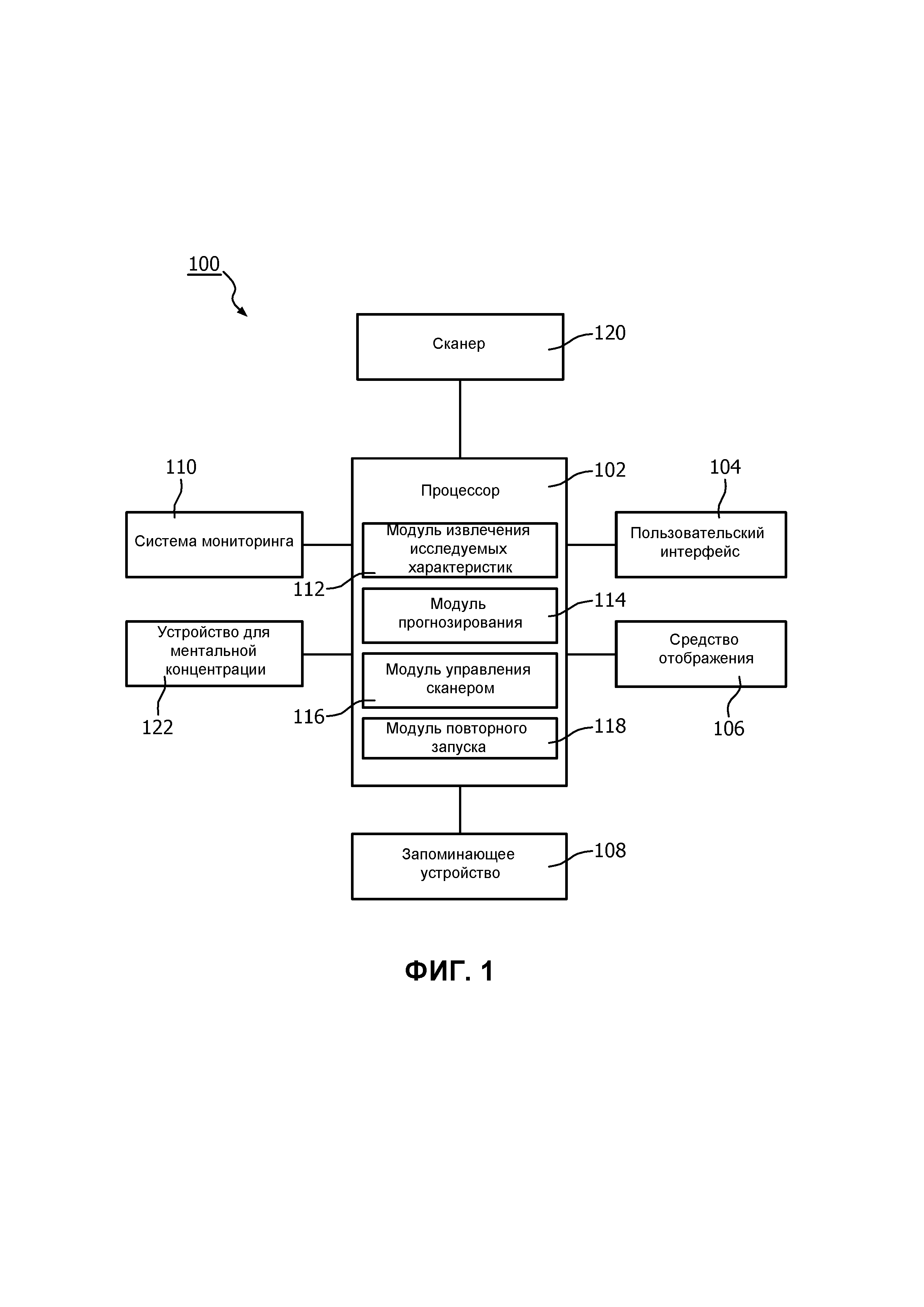
[0006] На Фиг. 1 показано схематичное изображение системы согласно одному примеру осуществления.
[0007] На Фиг. 2 показано другое схематичное изображение системы, представленной на Фиг. 1.
[0008] На Фиг. 3 показана блок-схема алгоритма способа согласно одному примеру осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0009] Примеры осуществлений можно будет лучше понять, изучив нижеследующее описание и сопроводительные чертежи, на которых одинаковые элементы имеют одинаковые ссылочные позиции. Примеры осуществлений относятся к системе и способу оптимизации процесса медицинской визуализации. В частности, примеры осуществлений описывают систему и способ прогнозирования движения пациента и прекращения получения изображения в течение предсказанного периода движения. Некоторые движения пациента могут быть сознательными, например, когда пациент совершает движение, чтобы занять более удобное положение или почесаться. Результаты исследований показали, что нейрофизиологические измерения, такие как EEG, MEG или EMG, свидетельствуют о возможности применения паттернов для прогнозирования и описания отличий реального физического движения, до того как это движение произойдет. Эти измерения могут соответствовать мыслительному процессу, приводящему к сокращению мышц или передаче этого сигнала группам мышц, выполняющим сознательное движение. Используя аналогичные подходы можно также предвидеть совершение непроизвольных движений. Таким образом, путем мониторинганейрофизиологических сигналов в процессе визуализации пациента можно прогнозировать некоторые фрагменты движения пациента, которые пагубно скажутся на данных визуализации, и избежать сбора данных изображения в течение этого периода движения.
[0010] Как показано на Фиг. 1 и 2, система 100 согласно одному примеру осуществления по настоящему раскрытию прогнозирует движение пациента в ходе процесса визуализации посредством физиологических измерений, чтобы избежать сбора искаженных движением данных. Система 100 содержит процессор 102, пользовательский интерфейс 104, средство 106 отображения, а также запоминающее устройство 108. Процессор 102 прогнозирует движение пациента путем измерения физиологических сигналов, поступающих от пациента посредством системы 110 мониторинга. Система 110 мониторинга включает в себя, например, электроэнцефалограф (EEG), магнитоэнцефалограф (MEG), электромиограф (EMG), электрокардиограф (ECG/EKG), камеру, диапазонную камеру передачи изображения, термозонд или камеру, датчики давления или любой датчик, измеряющий любое физиологическое состояние, указывающее на любое предстоящее движение, либо любое сочетание таковых. Модуль 112 извлечения исследуемых характеристик извлекает исследовательскую информацию, связанную с запрошенным исследованием изображения, например, части тела (например, головы, грудной клетки), методикой (например, MRI, CT), протоколом, разрешающей способностью и видом. Средство 114 прогнозирования процессора 102 интерпретирует сигналы, измеренные системой 110 мониторинга, и определяет, предполагается ли возникновение движения пациента, а также время возможного возникновения движения на основе извлеченной исследовательской информации. Когда средство 114 прогнозирования определяет, что движение пациента произойдет, средство 114 прогнозирования посылает сигнал остановки на модуль 116 управления сканером, который прекращает сбор данных изображения сканером 120 в течение заданного периода. В качестве опции система 100 дополнительно содержит модуль 118 повторного запуска, генерирующий и посылающий сигнал повторного запуска на сканер 120 для повторного запуска сбора данных изображения. Сигнал повторного запуска основан, например, на ручном вмешательстве пользователя и/или результате измерений, полученных датчиком посредством монитора 124 для повторного запуска, который указывает, что пациент вернулся в свое исходное положение. В качестве альтернативы датчики системы 110 мониторинга используются для детектирования возвратного движения пациента.
[0011] В качестве еще одного возможного элемента система 100 также дополнительно содержит устройство 122 для ментальной концентрации, притягивающее ментальное внимание пациента, чтобы не допустить движения пациента. Например, если пациент сосредоточен на устройстве для ментальной концентрации, меньше вероятность того, что внимание будет направлено на другие предметы, которые могут привести к движению пациента. Устройство 122 для ментальной концентрации может представлять собой, например, источник света, видеоизображение на экране, аудиосигнал или что-то еще, способное захватить внимание человека. В данном варианте осуществления система 110 мониторинга используется для определения уровня внимания пациента к устройству 122 для ментальной концентрации. По мере сбора данных изображения эти данные хранятся в запоминающем устройстве 108. Запоминающее устройство 108 в качестве опции также хранит данные пациента, например информацию о пациенте (например, идентифицирующую информацию, симптомы, диагнозы), предшествующие сканы, а также очередность исследования скана изображения. Когда все данные изображений собраны, по необходимости процессор 102 компилирует данные изображений для создания конечного изображения, которое может выводиться на средство 106 отображения и/или храниться в запоминающем устройстве 108. Пользователь может указать любые требуемые параметры и/или настройки через пользовательский интерфейс 104, который включает в себя устройства ввода данных, такие как клавиатура, манипулятор типа «мышь» и/или сенсорный дисплей на средстве 106 отображения.
[0012] На Фиг. 3 показан способ 200, с помощью которого система 100 прогнозирует движение пациента и не допускает сбора данных изображения в течение этого периода. На этапе 210 модуль 112 извлечения исследуемых характеристик извлекает исследовательскую информацию для запрошенного скана, например, в отношении части тела, методики, протокола, разрешающей способности и вида. Например, модуль 112 извлечения исследуемых характеристик анализирует очередность исследования для извлечения исследовательской информации. Исследовательская информация далее используется для определения индикатора допустимости движения на этапе 220. Индикатор допустимости движения представляет собой, например, пороговое значение или диапазон значений, указывающий допустимый диапазон движения пациента. Индикатор допустимости движения определяется с помощью, например, справочной таблицы с использованием типа исследования (например, MRI, CT) для определения диапазона движения, который является допустимым с точки зрения отсутствия негативного влияния на реконструкцию изображения. Например, MRI может иметь меньший допустимый диапазон, в то время CT-сканирование может иметь больший допустимый диапазон.
[0013] На этапе 230 сканер 120 начинает сбор данных изображения. Если система также включает в себя устройство 122 для ментальной концентрации, такое как источник света, видеоизображение на экране, аудиосигнал и т.д., устройство 122 для ментальной концентрации также приводится в действие, так что пользователь сосредоточен на устройстве 122, в то время как сканер 120 осуществляет сбор данных. Видеосигналы, например интересные новости, могут использоваться для привлечения ментального внимания, чтобы не допустить движения пациента. Перед началом визуализирующего исследования пациент может выбрать видео- или аудиотему, так что пациент может оставаться предельно сосредоточенным в процессе визуализирующего исследования.
[0014] На этапе 240 система 110 мониторинга измеряет физиологические сигналы пациента. Физиологические сигналы включают в себя, например, электромагнитные сигналы (например, волны, излучаемые мозгом, или сигналы, излучаемые другими элементами нервной системы), внешний вид кожи (например, цвет, текстуру), температуру, частоту дыхания, частоту сердечных сокращений, потоотделение, проводимость или механическое давление, либо распознавание выражения лица с помощью камеры, свидетельствующего о беспокойстве. Если устройство 122 для ментальной концентрации также используется, система 110 мониторинга может измерять и определять уровень внимания, сосредоточенного пациентом на устройстве 122 для ментальной концентрации. Чем выше уровень ментального внимания, тем ниже вероятность того, что пациент сосредоточится на других предметах, например, зудящих областях, что снижает вероятность возникновения движения тела. Данная технология может также использоваться для определения того, насколько субъект сосредоточен на инструкциях, выдаваемых оператором визуализирующего оборудования. Например, для сбора MR-данных сердца, при котором выполняется сбор данных с несколькими задержками дыхания, уровень ментального внимания свидетельствует о ментальной готовности пациента выполнять команды по задержке дыхания.
[0015] На этапе 250 физиологические сигналы направляются на средство 114 прогнозирования, так что средство 114 прогнозирования может интегрировать эти сигналы по времени и/или по типам сигналов с получением сигнала прогнозирования, который предсказывает, предполагается ли возникновение движения пациента, а также время, когда это произойдет. В одном примере осуществления физиологические сигналы интегрируются по времени путем усреднения за период, предшествующий моменту прогнозирования. В качестве альтернативы могут использоваться максимальное, минимальное, медианное, стандартное отклонение или любые другие статистические оценки.
[0016] В одном примере работы системы физиологические сигналы интегрируются по типам сигналов с использованием некоторой математической функции, например линейной комбинации величин сигналов, сгенерированных системой 110 мониторинга. В качестве альтернативы эта комбинация может описываться нелинейной функцией, характеристики которой могут определяться с использованием известных способов машинного обучения или оптимизации. Модуль 114 прогнозирования может обучаться с использованием данных, полученных от прошлых пациентов. Например, может быть получена совокупность данных режима обучения, для которых величины сигналов известны, а также известны факты появления или непоявления последующего события движения пациента в пределах фиксированного или адаптивного временного интервала. Параметры математической функции комбинирования (например, коэффициенты, показатели степени и т.д.) могут быть оптимизированы так, чтобы выбор этих параметров приводил к предсказанию движения пациента. Способы определения и построения такой функции включают, но не ограничиваются перечисленным, использование искусственных нейронных сетей, байесовских оценок, метода опорных векторов и классификаторов ближайшего целого. Эти способы далее позволяют оценить вероятность события движения, происходящего в пределах фиксированного или адаптивного временного интервала. В дополнительном варианте осуществления, в котором обследуемый пациент прошел повторное сканирование, собранные данные режима обучения могут быть специфичны для обследуемого пациента. В качестве еще одной опции система 100 может дополнительно содержать устройство, детектирующее движение, такое как видеокамеру, способную анализировать изображение. Устройство, детектирующее движение, синхронизировано со сканером 120. Модуль 114 прогнозирования, обученный на данных, полученных от предшествующих пациентов, применяется к обследуемому пациенту для прогнозирования движения обследуемого пациента. Если обследуемый пациент не совершил движения согласно прогнозу, зарегистрированные сигналы помечаются как принадлежащие классу под знаком "движение не осуществилось". Если пациент совершает движение, зарегистрированные сигналы помечаются знаком "движение осуществилось". Если имеется достаточное количество данных режима обучения, модуль 114 прогнозирования обучается на данных только одного обследуемого пациента или в дополнение к данным режима обучения предшествующих пациентов, чтобы повысить рабочие характеристики и точность модуля 114 прогнозирования в предсказании движения пациента.
[0017] В другом примере работы системы прогнозирование может осуществляться в один или несколько дискретных моментов времени, при этом выданные прогнозы объединяются по времени. Если прогнозы объединены по типам сигналов, модуль 114 прогнозирования может также предсказать тип движения, которое должно произойти. Например, модуль 114 прогнозирования может предсказать анатомическое расположение и масштаб прогнозируемого движения.
[0018] На этапе 260 модуль 116 управления сканером получает сигнал прогнозирования и/или измеренные уровни внимания к устройству 122 для ментальной концентрации с целью определения, произойдет ли движение согласно прогнозу. Например, если сигнал прогнозирования превышает пороговое значение (например, вероятность движения высока), найденное на этапе 220, система 100 может определить, что прогнозируется совершение движения, и перейдет к этапу 270, который изменяет (например, прекращает) сбор данных. Если сигнал прогнозирования меньше или равен пороговому значению, система 100 может определить, что совершение движения не прогнозируется или оно не является существенным, чтобы помешать реконструкции изображения. В этом случае способ 200 вернется к этапу 240, чтобы продолжить сбор физиологических сигналов от пациента. Как описано выше в отношении этапа 220, пороговое значение может изменяться на основе извлеченной исследовательской информации. Пороговое значение может изменяться в зависимости от части тела. Например, порог может быть разным для сканирования головы, грудной клетки и ног. Специалистам в данной области техники понятно, что определение того, является ли вероятное движение достаточно существенным, чтобы повлиять на реконструкцию изображения, может осуществляться самыми разными способами, например с использованием диапазона значений или порогового значения, как описано выше. Пороговые значения, используемые для определения уровня внимания пациента к устройству для ментальной концентрации, могут отличаться от пороговых значений, используемых для определения того, следует ли изменить сбор данных сканером 120.
[0019] На этапе 270 сбор данных изменяется, когда определено, что вероятность движения превышает некоторое пороговое значение. В одном примере, в котором сканер 120 представляет собой CT-сканер, подача электроэнергии на рентгеновскую трубку может быть прекращена, когда прогнозируется совершение движения. В другом примере, в котором сканер 120 представляет собой MR-сканер, может быть просто прекращен сбор данных. В одном альтернативном варианте осуществления, если предсказано место, в котором произойдет движение, сбор данных может быть смещен в область, менее чувствительную к движению. Например, для MR-сканов, в которых получены срезы изображений, выбор срезов может быть сфокусирован на другой части анатомической структуры или участках магниторезонансного k-пространства, в которых меньшая чувствительность к движению наблюдается ближе к центру. В дополнительном варианте осуществления чувствительность системы 100 может регулироваться пользователем через пользовательский интерфейс 104. Например, пользователь может регулировать пороговое значение, полученное на этапе 220.
[0020] На этапе 280 модуль 118 повторного запуска посылает сигнал повторного запуска на сканер 120 для возобновления сбора данных или возврата в свое исходное состояние. Сигнал повторного запуска может основываться на фиксированном времени, ручном вмешательстве пользователя или результате измерений, полученных датчиком, который указывает, что пациент вернулся в свое исходное положение. Датчики, детектирующие возвратное движение, могут включать в себя элементы системы 100 мониторинга либо могут быть независимыми. Эти датчики не предсказывают движение, а сравнивают текущее физическое положение пациента с физическим положением, занимаемым перед тем, как сбор данных был изменен на этапе 270.
[0021] Следует отметить, что формула изобретения может включать в себя ссылочные позиции/номера позиций согласно правилу 6.2(b) PCT. Однако настоящая формула изобретения не ограничена примерами осуществления, соответствующими ссылочным позициям/номерам позиций.
[0022] Специалистам в данной области техники понятно, что вышеописанные примеры осуществления могут быть реализованы самыми разными способами, в том числе в виде отдельного модуля системы программного обеспечения, сочетания аппаратного обеспечения и программного обеспечения и т.д. Например, модуль 112 извлечения исследуемых характеристик, модуль 114 прогнозирования, модуль 116 управления сканером и модуль 118 повторного запуска могут представлять собой программы, содержащие строки программ, которые, будучи скомпилированными, могут выполняться процессором.
[0023] Специалистам в данной области техники ясно, что в раскрытые примеры осуществления, а также способы и их альтернативные варианты могут быть внесены различные изменения, не выходя за границы сущности и объема изобретения. Таким образом, предполагается, что настоящее раскрытие охватывает эти модификации и изменения, если они входят в объем притязаний прилагаемой формулы изобретения и ее эквивалентных пунктов.
Реферат
Группа изобретений относится к медицинской технике, а именно к сбору медицинских изображений для томографической визуализации. Способ мониторинга движения в процессе медицинской визуализации содержит инициацию сбора данных изображения, измерение физиологических сигналов пациента, при этом физиологические сигналы содержат один нейрофизиологический сигнал, прогнозирование на основе нейрофизиологического сигнала, возникнет ли пороговое значение движения пациента и изменение сбора данных изображения, когда прогнозируется, что возникнет пороговое значение движения пациента, при этом изменение включает в себя смещение сбора данных в область пациента, менее чувствительную к движению. Способ выполняется системой мониторинга движения в процессе медицинской визуализации. Энергозависимый машиночитаемый носитель содержит набор данных инструкции для выполнения способа. Использование группы изобретений позволяет уменьшить искажения данных при движении пациента и улучшить реконструкции изображения с учетом компенсации движения. 3 н. и 10 з.п. ф-лы, 3 ил.
Комментарии