Медицинское ультразвуковое устройство с определением усилия - RU2556975C2
Код документа: RU2556975C2
Чертежи







Описание
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к медицинскому ультразвуковому устройству, такому как зонд или устройство на основе катетера. В частности, изобретение относится к таким устройствам, которые способны детектировать контактное усилие, прикладываемое к области дистального конца устройства.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Основанное на катетере хирургическое вмешательство благоприятно используют в различных отношениях для лечения органов тела при минимальном размере рассечения и клиренсе органов. В качестве примера, аритмию сердца можно лечить посредством различных основанных на катетере способов абляции для разрушения аритмогенных частей сердечной ткани. В частности, общеупотребительными являются радиочастотная (РЧ) абляция, абляция сфокусированным ультразвуком высокой интенсивности (HIFU) или криоабляция ткани.
В отношении процесса абляции сердечной ткани недавно поняли, что контактное усилие между кончиком абляционного катетера и сердечной тканью представляет собой крайне важную переменную, которую нужно контролировать. Показано, что контактное усилие является решающим фактором в отношении размера повреждения, см. «Novel Contact Force Sensor Incorporated in Irrigated Radio frequency Ablation Catheter Predicts Lesion Size and Incidence of Steam Pop and Thrombus», Circ Arrhythmia Electrophysiol, 2008 исследователей Yokoyama et al. Слишком сильное контактное усилие может вести к излишнему повреждению здоровой ткани, тогда как слишком слабое контактное усилие может вести к созданию недостаточного повреждения. Кроме того, риск осложнений резко возрастает вместе с контактным усилием, в частности, относительно риска образования хлопков пара и тромбов в связи с абляцией. Дополнительно, посредством применения слишком сильного контактного усилия, можно повредить сердечную стенку, что приведет к ошибкам регистрации электроанатомического картирования, см. «Systematical analysis of in vivo contact forces on virtual catheter tip/tissue surface contact during cardiac mapping and intervention», J Cardiovasc Electrophysiol, 2008 исследователей Okumura et al.
В опубликованной патентной заявке US 2008/0009750 A1 раскрыт катетер для диагностики или лечения сосуда или органа. Катетер в области его дистального конца имеет встроенный трехосевой датчик усилия для определения контактного усилия. Датчик усилия содержит корпус и множество световодных волокон в корпусе, который измеряет изменения в интенсивности света, возникающие в результате деформаций корпуса. Деформацию вызывают усилия, прикладываемые к дистальному концу катетера. Трехосевой датчик усилия и связанные волокна занимают пространство в дистальной области катетера и, кроме того, необходим источник света, который увеличивает стоимость устройства.
В данной области все еще сохраняется потребность в усовершенствованном оборудовании, пригодном для использования в связи с основанном на катетере хирургическом вмешательстве.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Будет полезным создать датчик усилия, подходящий для встраивания в медицинское устройство, такое как медицинский зонд или катетер, который не требует дополнительного пространства или только предлагает минимальные требования к пространству в области дистального конца медицинского устройства. В основном, изобретение предпочтительно стремится к уменьшению, снижению или устранению одного или нескольких указанных выше недостатков по отдельности или в любом сочетании. Задачей настоящего изобретения является предоставление способа, который решает указанные выше проблемы или другие проблемы известного уровня техники.
Чтобы более полно решить один или несколько из этих вопросов, в первом аспекте изобретения представлено медицинское ультразвуковое устройство, которое содержит:
- удлиненный корпус, который имеет проксимальный конец, область дистального конца и продольную ось вдоль удлинения;
- один или несколько ультразвуковых преобразователей для генерации акустического излучения, указанные один или несколько ультразвуковых преобразователей размещены в области дистального конца, внутри удлиненного корпуса;
- пропускающий элемент, расположенный на пути излучения акустического излучения, причем пропускающий элемент является по существу прозрачным для акустического излучения;
- при этом пропускающий элемент и один или несколько ультразвуковых преобразователей установлены так, чтобы длина акустического пути между пропускающим элементом и ультразвуковым преобразователем изменялась вместе с контактным усилием, приложенным к области дистального конца.
Согласно изобретению предложено медицинское устройство, такое как катетер или зонд, с интегрированными ультразвуковыми средствами, где ультразвуковое излучение можно использовать в общих целях, а также для генерации меры контактного усилия, прикладываемого к области дистального конца. В благоприятном варианте осуществления один или несколько ультразвуковых преобразователей способны генерировать акустическое излучение, подходящее для мониторинга области, представляющей интерес, одновременно с, параллельно с или вместе с определением длины акустического пути между ультразвуковым преобразователем и пропускающим элементом. Контактное усилие, приложенное к дистальному концу, выводят из длины пути. Если определение контактного усилия осуществлять на определении ультразвукового излучения и длине пути между ультразвуковым преобразователем и пропускающим элементом, ключевые элементы для выполнения определения контактного усилия представляют собой элементы, которые также можно использовать для других целей, а отдельный датчик не обязателен. Ультразвуковой преобразователь(и) можно использовать в целях мониторинга, и пропускающий элемент всегда необходим для того, чтобы выводить акустическое излучение из медицинского устройства. Следовательно, предусмотрено компактное и экономически эффективное медицинское устройство.
В контексте настоящего изобретения мониторинг следует толковать в широком смысле. Он включает как одномерный мониторинг, т.е. обнаружение отраженной интенсивности вдоль линии зрения, а также двухмерную визуализацию, где массив преобразователей применяют для генерации двухмерного изображения. В принципе, также можно добиться трехмерной визуализации и визуализации с временным разрешением. В основанном на катетере мониторинге обычно используют одномерный или двухмерный мониторинг вследствие пространственных ограничений в области дистального конца, т.е. в области кончика.
В основном, пропускающий элемент должен быть по существу прозрачным для акустического излучения. Этому отвечают многие материалы, включая различные полимерные материалы. В основном можно использовать любой материал при условии, что прозрачность достаточна для возможности клинического использования, а также возможности определении длины акустического пути через элемент. В частности, можно использовать материал с прозрачностью для акустического излучения выше 50%, например, выше 60%, 70%, 80%, 90% или даже выше 95%.
В предпочтительном варианте осуществления длину акустического пути между ультразвуковым преобразователем и пропускающим элементом определяют на основе определения отраженного акустического излучения от поверхности задней стороны пропускающего элемента или от поверхности передней стороны пропускающего элемента. В частности, определение длины акустического пути может быть основано на определении времени прохождения и изменений времени прохождения излучения, испускаемого преобразователем, которое отражено от поверхности пропускающего элемента, и снова определено посредством преобразователя.
В предпочтительном варианте осуществления медицинское устройство дополнительно содержит сжимаемый элемент, расположенный в области дистального конца, сжимаемый элемент способен менять свои размеры как функцию приложенного сжимающего усилия, возникающего в результате изменений длины акустического пути. Предпочтительно использовать сжимаемый элемент, поскольку сжимаемый элемент можно встроить в область дистального конца компактным образом. В зависимости от конкретного варианта осуществления, сжимаемый элемент можно встраивать в область дистального конца таким образом, который не требует дополнительного пространства в области дистального конца, или который накладывает лишь минимальные требования к пространству.
В предпочтительных вариантах осуществления сжимаемый элемент, такой как сжимаемая муфта, встроен в удлиненный корпус. В других предпочтительных вариантах осуществления один или несколько сжимаемых элементов, таких как один или несколько упругих элементов, встроены в пропускающий элемент или прикреплены к пропускающему элементу.
В предпочтительном варианте осуществления устройство содержит по меньшей мере два ультразвуковых преобразователя для испускания акустического излучения вдоль по меньшей мере двух осей. Используя два или более ультразвуковых преобразователей, можно определять усилие в двух или более (трех) измерениях.
Предпочтительно, пропускающий элемент может содержать терапевтическое воздействие для лечения ткани организма. В варианте осуществления терапевтическое воздействие представляет собой абляцию, такую как радиочастотная (РЧ) абляция.
В варианте осуществления абляцию осуществляют посредством использования электрода, поддерживаемого пропускающим элементом. Можно предусмотреть такой электрод, что акустическое излучение по существу не меняется из-за присутствия электрода. В варианте осуществления электрод представлен в форме тонкого слоя, который достаточно тонок, чтобы быть по существу прозрачным для акустического излучения. Акустическое излучение будет пропускаться по существу неизмененным за счет присутствия металлического слоя толщиной менее 500 нанометров, например, менее 250 нанометров, например, толщиной 150 нанометров. В других вариантах осуществления электрод может быть представлен в форме сетки или других открытых структур. Электрод в форме сетки, с центральным отверстием или даже в форме полосы или кольца, может позволять излучению проходить, и все еще быть способным выполнять функцию РЧ-электрода. Преимущество состоит в том, чтобы использовать установку, которая допускает одновременное определение усилия и терапевтическое воздействие для лечения. Несмотря на то, что определение усилия можно осуществлять без терапевтического воздействия для лечения, тем не менее, во время лечения, например, во время абляции, наиболее важно обеспечить должное контактное усилие между устройством и тканью.
Во втором аспекте изобретения представлена медицинская система. Система содержит медицинское устройство в соответствии с первым аспектом изобретения и блок контроллера, функционально соединенный с ультразвуковым преобразователем, причем блок контроллера определяет длину акустического пути между ультразвуковым преобразователем и пропускающим элементом и определяет контактное усилие по установленной длине акустического пути.
В варианте осуществления, где пропускающий элемент дополнительно содержит терапевтическое воздействие для лечения ткани организма, терапевтическое воздействие для лечения можно функционально соединить с блоком контроллера с тем, чтобы терапевтическое воздействие при лечении находилось под управлением в предварительно установленном диапазоне контактных усилий. Соответствующие контактные усилия могут быть настолько малы, что медицинский практик не способен воспринимать изменения в приложенном контактном усилии, а управление терапевтическим воздействием при лечении в предварительно установленном диапазоне контактных усилий может гарантировать, что мощность абляции, доставляемую в ткань, можно применять безопасно.
В третьем аспекте изобретения представлен способ работы медицинского устройства. Медицинское устройство в соответствии с первым аспектом изобретения содержит следующие шаги, на которых
- генерируют акустическое излучение посредством приведения в действие одного или нескольких преобразователей в режиме генерации;
- определяют отраженное акустическое излучение посредством приведения в действие одного или нескольких преобразователей в режиме определения;
- определяют длину акустического пути между пропускающим элементом и ультразвуковым преобразователем по отраженному акустическому излучению;
- определяют контактное усилие по установленной длине акустического пути.
В четвертом аспекте изобретения представлен компьютерный программный продукт, который адаптирован для того, чтобы позволить компьютерной системе, содержащей по меньшей мере один компьютер, имеющий средство хранения данных, связанное с ним, для приведения в действие медицинского устройства по первому или второму аспектам изобретения или для осуществления операций по третьему аспекту изобретения.
В целом, различные аспекты изобретения можно комбинировать и объединять каким-либо образом, возможным в рамках объема изобретения. Эти и другие аспекты, признаки и/или преимущества изобретения видны из и разъяснены в отношении вариантов осуществления, описанных далее в настоящем документе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения описаны лишь в качестве примера со ссылками на чертежи, на которых
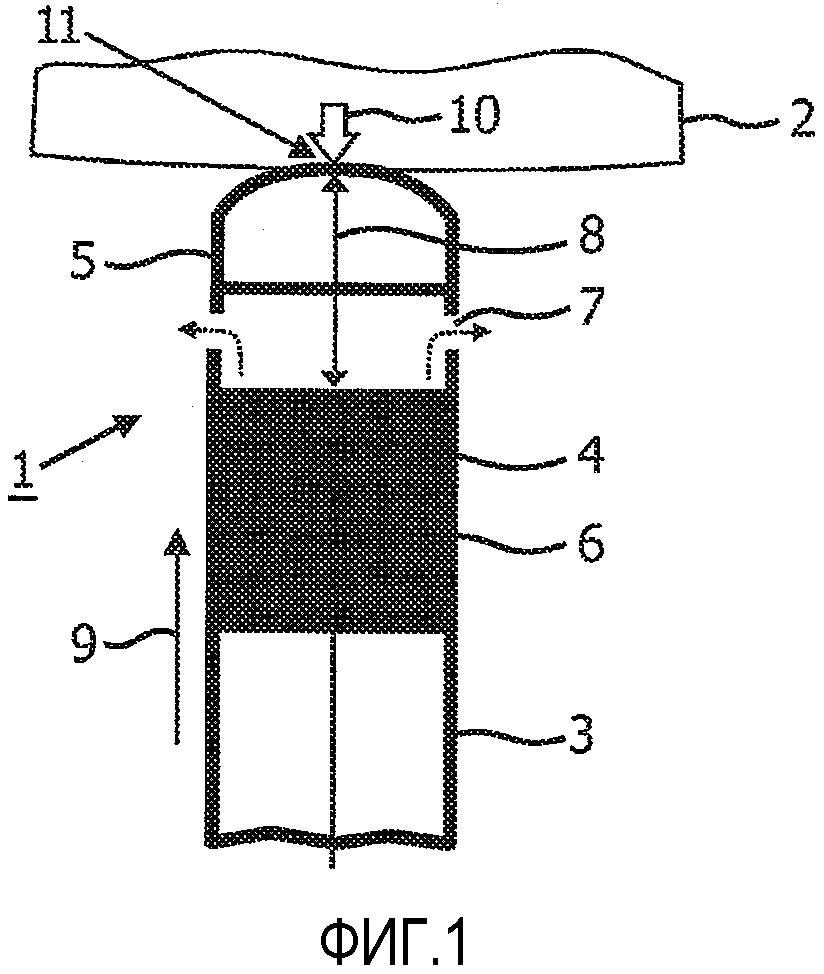
фиг.1 изображает область дистального конца абляционного основанного на катетере зонда;
фиг.2 изображает абляционный электрод, поддерживаемый пропускающим элементом;
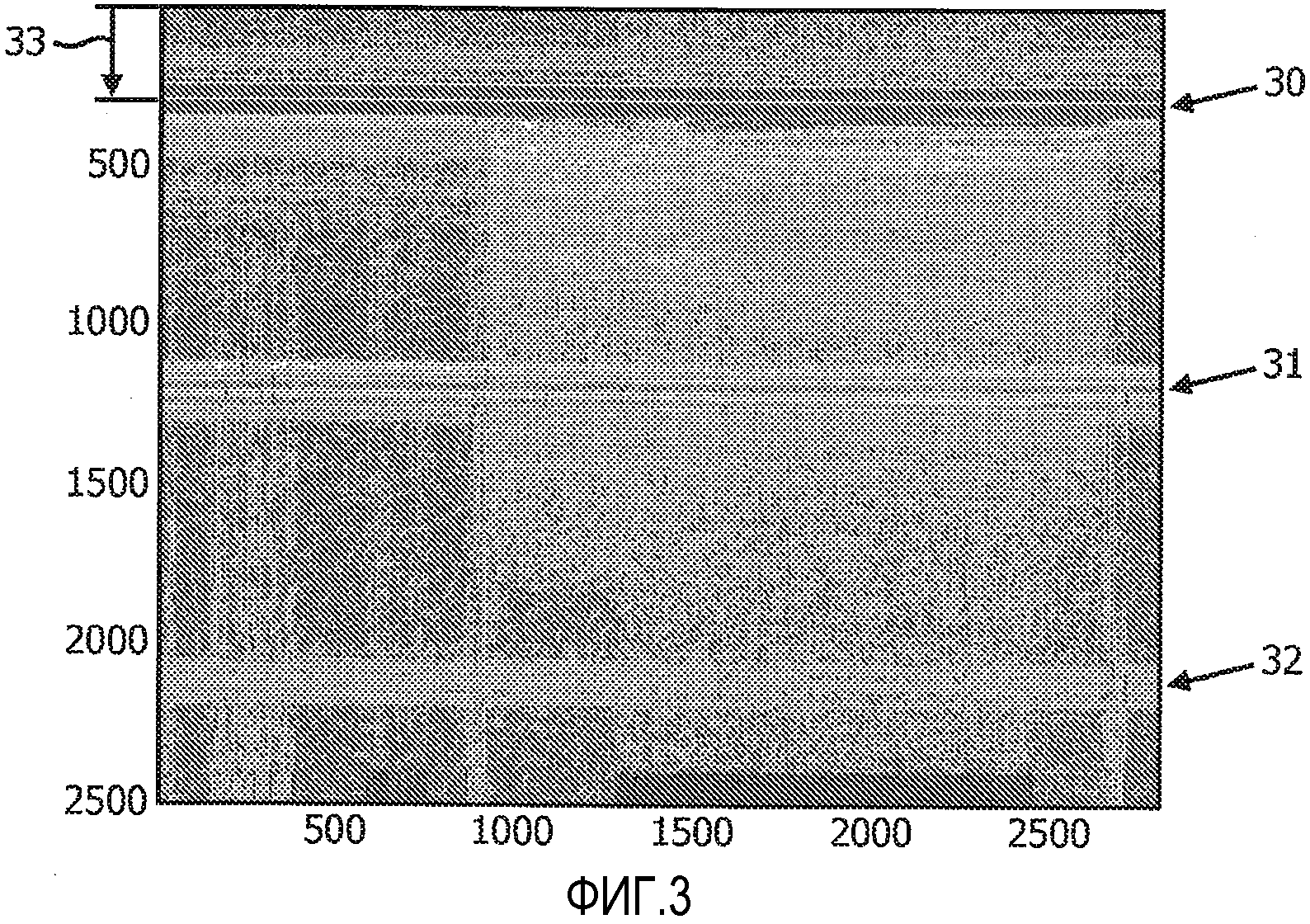
фиг.3 изображает снимок экрана ультразвукового изображения в M-режиме для сердечной абляции в сердце овцы;
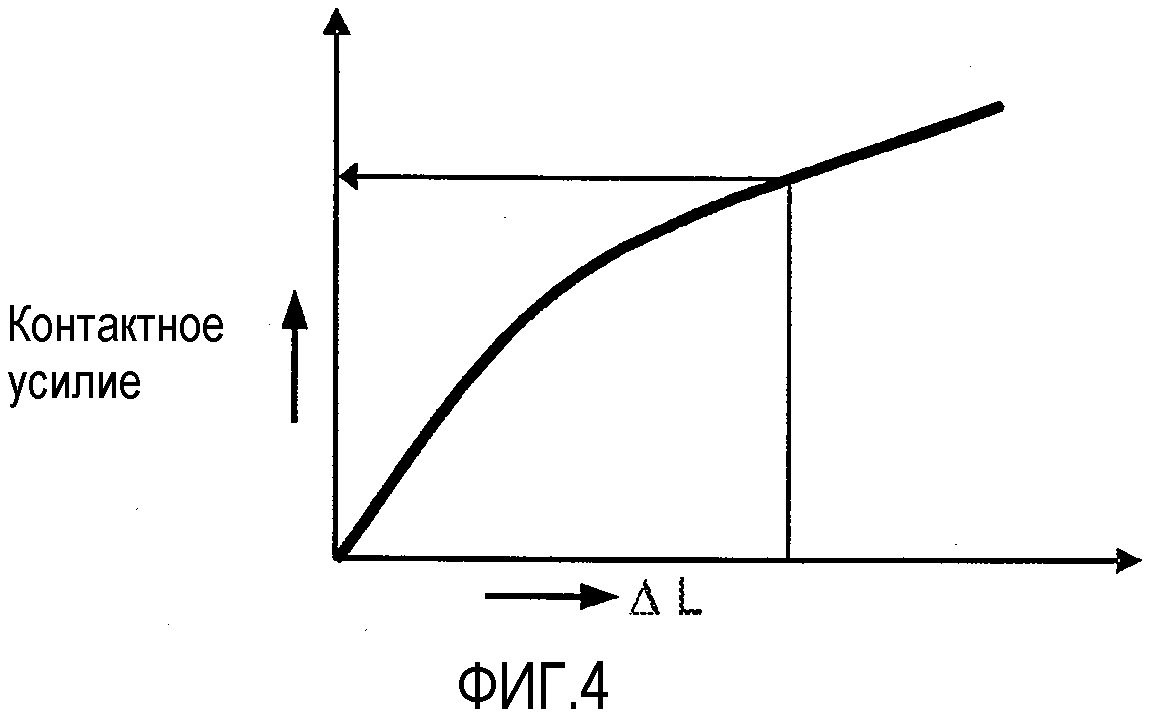
фиг.4 изображает функциональную зависимость между ΔL по горизонтальной оси и контактным усилием по вертикальной оси;
фиг.5 изображает вариант осуществления медицинского устройства со сжимаемым элементом в форме сжимаемой муфты, встроенной в удлиненный корпус;
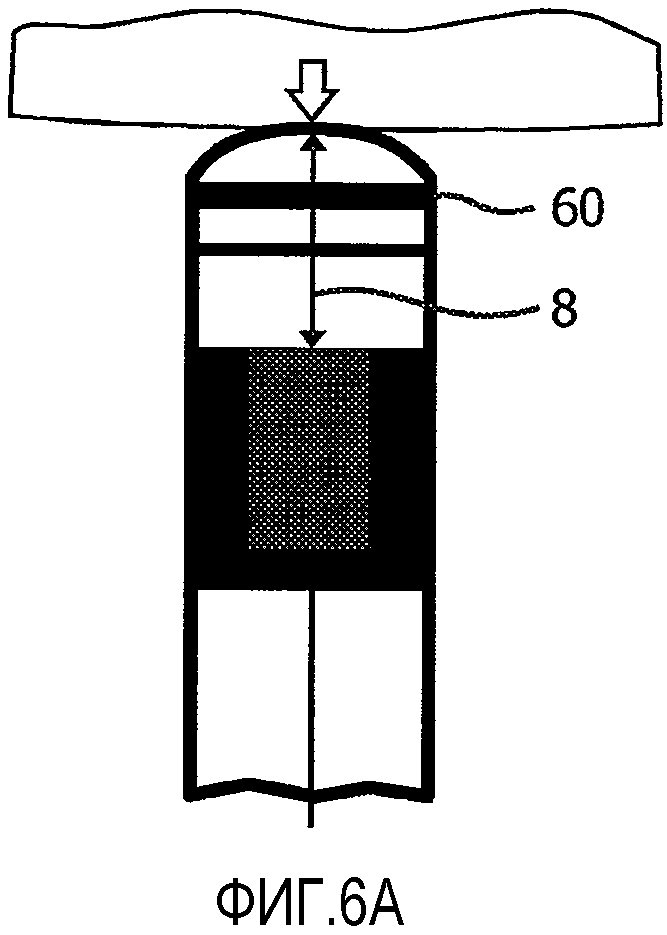
фиг.6A и 6B изображают вариант осуществления медицинского устройства со сжимаемым элементом, встроенным в (A) и прикрепленным к (B) пропускающему элементу;
фиг.7 изображает вариант осуществления медицинского устройства, где пропускающий элемент прикреплен в области дистального конца удлиненного корпуса посредством одного или нескольких сжимаемых элементов;
фиг.8A и 8B изображают вариант осуществления медицинского устройства с двумя ультразвуковыми преобразователями;
фиг.9 изображает блочную схему контура обратной связи, который можно использовать для автоматической регуляции абляционной мощности, прикладываемой через кончик катетера на основе контактного усилия между кончиком катетера и тканью;
фиг.10 изображает блок-схему операций способа, которые можно осуществлять для того, чтобы приводить в действие медицинское устройство в соответствии с вариантами осуществления настоящего изобретения; и
фиг.11 изображает медицинскую систему в связи с компьютерным программным продуктом.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение раскрыто в связи с РЧ абляционным катетером, содержащим систему мониторинга, в соответствии с вариантами осуществления настоящего изобретения. Однако следует понимать, что несмотря на то что такое применение является полезным, изобретение не ограничено этим. Фактически медицинское устройство можно применять в связи с любым устройством, в котором используют ультразвуковые преобразователи и которое поддерживает структурную конфигурацию, которая позволяет менять длину акустического пути между пропускающим элементом и ультразвуковым преобразователем вместе с контактным усилием, приложенным к области дистального конца.
На фиг.1 схематически проиллюстрирована область дистального конца 1 абляционного основанного на катетере зонда, далее в настоящем документе просто обозначаемого как катетер, прилегающего к объекту 2, такому как ткань в форме сердечной стенки. Катетер содержит удлиненный корпус 3, область дистального конца 1 и проксимальный конец (не показан). Продольная ось 9 проходит вдоль удлиненного корпуса. Область дистального конца 1 представляет собой выступающую часть конца удлиненного корпуса 3, прилегающую к самому дистальному концу 11. На проксимальном конце катетер может быть соединен с блоком контроллера (см. фиг.11), чтобы сформировать медицинскую систему. Ультразвуковой преобразователь 4 размещен в области дистального конца, где он прикреплен подходящим средством 6. Катетер содержит пропускающий элемент 5, расположенный на пути акустического излучения. Пропускающий элемент можно использовать в качестве пропускающего окна, чтобы выводить акустическое излучение из медицинского устройства. Пропускающий элемент имеет заднюю сторону, как правило, обращенную к ультразвуковому преобразователю, и противоположно обращенную переднюю сторону. Пропускающий элемент является по существу прозрачным для акустического излучения, чтобы излучение, генерируемое посредством ультразвукового преобразователя, проходило через пропускающий элемент для взаимодействия с тканью 2, которую исследуют или лечат. В варианте осуществления акустическое излучение испускают вдоль длинной оси 9.
Как проиллюстрировано на фиг.1, область дистального конца может дополнительно содержать каналы для текучего вещества 7, которые позволяют доставлять текучее вещество через удлиненный корпус в область дистального конца с тем, чтобы орошать место лечения во время лечения, если это необходимо или желательно, типично используют физиологический раствор, который закачивают из резервуара, расположенного на проксимальном конце. Каналы для текучего вещества могут представлять собой отверстия в стенке трубки, как в проиллюстрированном варианте осуществления, или могут быть выполнены посредством других подходящих средств.
В варианте осуществления устройство может представлять собой, например, ультразвуковой катетер с встроенным абляционным электродом. Ультразвуковой катетер поддерживает мониторинг свойств ткани посредством приведения в действие ультразвукового преобразователя в режиме мониторинга, где испускают ультразвуковые импульсы и определяют отраженное излучение для того, чтобы генерировать ультразвуковое изображение или сканирование. Специалисту известно приведение в действие ультразвукового преобразователя для определения отраженного излучения.
Удлиненный корпус может быть выполнен из гибкого материала, такого как подходящий полимерный материал для использования в медицинском устройстве. Специалистам известны такие материалы. Таким образом, получают гибкое устройство. Альтернативно удлиненный корпус может быть выполнен из жесткого материала, такого как хирургическая сталь или другие подходящие материалы, которые известны специалистам. Жесткое устройство можно реализовать, например, в виде игольчатого устройства.
Пропускающий элемент и ультразвуковой преобразователь установлены так, чтобы длина акустического пути между пропускающим элементом и ультразвуковым преобразователем менялась вместе с контактным усилием, прикладываемым к области дистального конца. То есть, если кончик катетера вдавливают в ткань 2, длина акустического пути меняется вместе с прикладываемым усилием 10. Длину акустического пути можно выражать, например, в виде длины 8 между верхней поверхностью ультразвукового преобразователя и передней поверхностью пропускающего элемента. Определением длины акустического пути управляет блок контроллера, который по установленной длине пути определяет контактное усилие.
На фиг.2 схематически проиллюстрирован абляционный электрод 20, поддерживаемый пропускающим элементом 5. Пропускающий элемент имеет заднюю сторону 21 и переднюю сторону 22. Абляционный электрод можно сформировать посредством тонкого проводящего слоя, поддерживаемого пропускающим элементом. В варианте осуществления пропускающий элемент содержит корпус на полимерной основе и проводящий слой. Корпус на полимерной основе можно выполнить из материала полиметилпентена (TPX), который является общеупотребительным в связи с ультразвуком, тогда как проводящий слой может представлять собой металлический слой, такой как слой платины. Подходящие толщины могут составлять несколько сотен микрометров TPX в толщину, несущие несколько сотен нанометров слоя платины в толщину, например, TPX элемент толщиной 250 микрометров, несущий слой платины толщиной 150 нанометров. Толщина TPX элемента представляет собой толщину в центральной области. Также можно использовать другие материалы при условии, что они достаточно прозрачны для акустического излучения. Пропускающий элемент и поддерживаемый электрод изображены в скругленной конфигурации, которая представляет собой клинически уместную форму. В целом, можно использовать любую форму.
На фиг.3 проиллюстрирован снимок экрана с ультразвуковым изображением в M-режиме для сердечной абляции в сердце овцы, которое генерируют посредством абляционного катетера того типа, который схематически проиллюстрирован на фиг.1. Вертикальная ось показывает расстояние от преобразователя. Расстояние задают в пикселях, которые можно преобразовать во время или глубину. Горизонтальная ось иллюстрирует время, также приведенное в пикселях (приращение на 20 пикселей равно 1 секунде). На изображении показано сильное однократное отражение 30 от TPX/Pt абляционного электрода, и, кроме того, пики 31, 32 отражения второго и третьего порядка. Положения этих отражений связаны с временем прохождения ультразвукового сигнала и, следовательно, с расстоянием от ультразвукового преобразователя до абляционного электрода. Следовательно, расстояние между ультразвуковым преобразователем и TPX элементом можно определить с точностью, равной осевому разрешению ультразвука. При частоте визуализации 20 МГц это разрешение равно осевому разрешению ультразвука. При частоте визуализации 20 МГц это разрешение равно 0,04 мм (половина длины волны) или 5 пикселям (заданная частота дискретизации 200 МГц).
Изменение расстояния между ультразвуковым преобразователем и абляционным электродом (номер позиции 8 на фиг.1) ведет к изменению положения (номер позиции 33 на фиг.3) отражения абляционного электрода на изменениях изображения в M-режиме. Изменением расстояния, далее в настоящем документе обозначаемое как ΔL, которое можно измерить посредством блока контроллера и которое основано на измеренной ΔL, можно определять контактное усилие.
На фиг.4 схематически проиллюстрирована функциональная зависимость между ΔL, отложенной по горизонтальной оси, и контактным усилием, отложенным по вертикальной оси. Определение контактного усилия можно выполнять на основании функциональной зависимости, таблицы соответствия или с помощью любого другого подходящего средства. Зависимость между ΔL и контактным усилием или может заблаговременно определять поставщик медицинского устройства, или пользователь может ее калибровать и сохранять результат калибровки в блоке контроллера. Понимая, что контактное усилие можно определить по положению пиков отражения, практическая реализация подходящего алгоритма находится в пределах способностей специалиста. Использование таблиц соответствия или функциональных зависимостей обеспечивает быстрые и гибкие способы нахождения соответствия между измеренной длиной пути и контактным усилием во время клинического использования.
Для того чтобы менять ΔL вместе с контактным усилием, область дистального конца может содержать сжимаемый элемент, причем сжимаемый элемент способен менять свой размер как функцию приложенного сжимающего усилия. Поскольку меняется размер сжимаемого элемента, также меняется длина акустического пути. На фиг.5-8 проиллюстрированы варианты осуществления катетеров, в которых предусмотрены различные типы сжимаемых элементов в области дистального конца.
На фиг.5 проиллюстрирован вариант осуществления медицинского устройства со сжимаемым элементом 50. Сжимаемый элемент представлен в форме сжимаемой муфты 50, встроенной в удлиненный корпус, типично в область дистального конца, в виде кольцевой полосы, установленной в удлиненном корпусе. Контактное усилие 10, приложенное к кончику катетера, будет уменьшать длину 52 сжимаемой муфты на величину ΔL. В результате, расстояние 8 от ультразвукового преобразователя до передней поверхности пропускающего элемента будет уменьшено на ту же величину. Сжимаемый элемент можно устанавливать в любом подходящем положении вдоль длинной оси удлиненного корпуса.
Величина ΔL зависит от модуля Юнга Y материала, из которого сформирована сжимаемая муфта:
F=Y×ΔL×A/L,
где F представляет собой контактное усилие, L представляет собой длину несжатой муфты, A представляет собой площадь поперечного сечения сжимаемой муфты. Это уравнение имеет силу, если R/t
F=Y×ΔL×t/L.
Для 20 МГц ультразвукового изображения разрешение составляет 0,04 мм, следовательно, можно точно измерить изменение расстояния, превышающее это значение. В 7,5F катетере для визуализации сжимаемая муфта длиной 3 мм, которая выполнена из материала с модулем Юнга 0,15 мПа, будет сжиматься на ΔL 0,05 мм на каждые 5 граммов (-0,05 Н) контактного давления. Силиконовые эластомеры, некоторые формы резины и полиэтилен очень низкой плотности (LDPE) имеют модули Юнга в этом диапазоне и являются биологически совместимыми. Силиконовые эластомеры обладают преимуществом, которое состоит в том, что они термостабильны от -70 до 250°C, тогда как резина и LDPE могут быть стабильными только до 100°C. Однако эта температура, по-прежнему, достаточно высока для большинства, если не для всех применений абляций. Толщина муфты и ее эластичность имеют значение. ΔL только 0,05 мм для изменения контактного давления на каждые 5 г будет иметь ничтожное влияние на обращение с кончиком катетера (т.е. на его ощущаемую мягкость, гибкость и т.д.). Таким образом, в вариантах осуществления можно определять контактные давления, округленные до ближайших 5 г. Эта информация позволит врачу сохранять контактное усилие в оптимальном диапазоне 10-20 г. Если для сжимаемой муфты нужна опорная конструкция, ее можно усилить спиральной оплеткой вдоль ее внутренней поверхности (модуль упругости которой совпадает с таковым материала муфты). В вариантах осуществления материал сжимаемого элемента имеет модуль Юнга в диапазоне от 0,05 мПа до 0,30 мПа, например в диапазоне от 0,1 мПа до 0,25 мПа, например в диапазоне от 0,15 мПа до 0,2 мПа. В вариантах осуществления толщина муфты может быть в диапазоне от 0,05 мм до 0,5 мм, например,в диапазоне от 0,1 мм до 0,4 мм, например в диапазоне от 0,2 мм до 0,3 мм. В вариантах осуществления материал сжимаемого элемента можно выбрать с тем, чтобы сжимать сжимаемый элемент посредством сжимающего усилия в диапазоне от 0,05 Н до 0,5 Н, например в диапазоне от 0,1 Н до 0,4 Н, например в диапазоне от 0,2 Н до 0,3 Н.
На фиг.6A проиллюстрирован вариант осуществления медицинского устройства, где сжимаемый элемент представляет собой упругий элемент 60, встроенный в пропускающий элемент. Упругий элемент может представлять собой механическую пружину. Изменение ΔL пружины уменьшает расстояние 8 от ультразвукового преобразователя до передней поверхности пропускающего элемента на ту же величину при условии, что остальная часть кончика катетера является несжимаемой. Механическая пружина может представлять собой такие элементы, как спираль, полая цилиндрическая сетка или кусок упругого материала. Пружина может иметь модуль упругости k приблизительно 1000 Н/м (таким образом, усилие 5 г может вести к сжатию кончика на 0,05 мм), например, модуль упругости в диапазоне от 750 Н/м до 1250 Н/м. В варианте осуществления пружина выполнена из электропроводного материала, чтобы электрический ток протекал через нее в кончик электрода. В дополнительном варианте осуществления шаг пружины можно использовать в качестве каналов для текучего вещества для орошения. В проиллюстрированном варианте осуществления упругий элемент расположен центрально относительно пропускающего элемента. В других вариантах осуществления положение упругого элемента можно сместить к одному концу пропускающего элемента.
На фиг.6B проиллюстрирован вариант осуществления медицинского устройства с упругим элементом в той форме, которая раскрыта выше для фиг.6A. Однако вместо встраивания упругого элемента в пропускающий элемент, упругий элемент прикрепляют к задней стороне пропускающего элемента, чтобы упругий элемент служил межсоединением удлиненного корпуса и пропускающего элемента.
На фиг.7 проиллюстрирован вариант осуществления медицинского устройства, где пропускающий элемент 5 прикреплен к области дистального конца 72 удлиненного корпуса посредством одного или нескольких сжимаемых элементов 70 и где область между удлиненным корпусом и пропускающим элементом покрыта деформируемым материалом 71, окутывающим эту область. В проиллюстрированном варианте осуществления три упругих элемента расположены по площади поперечного сечения между удлиненным корпусом и пропускающим элементом. Упругие элементы защищены тонкой фольгой 71 в виде баллона. В варианте осуществления фольга выполнена из достаточно тонкого материала с тем, чтобы не влиять на общий модуль упругости. Кроме того, фольга может быть длиннее пружин в их крайнем положении, что схематически проиллюстрировано выгибом фольги. Общий модуль упругости k также должен составлять приблизительно 1000 Н/м (таким образом усилие 5 г будет вести к сжатию кончика на 0,05 мм), например, общий модуль упругости должен находиться в диапазоне от 750 Н/м до 1250 Н/м.
В клинической ситуации кончик катетера можно держать как перпендикулярно, так и параллельно ткани сердца, и, следовательно, контактные усилия могут быть как перпендикулярны, так и параллельны длинной оси катетера.
На фиг.8 проиллюстрирован вариант осуществления медицинского устройства, где устройство содержит по меньшей мере два ультразвуковых преобразователя 80, 81, первый ультразвуковой преобразователь, чтобы испускать акустическое излучение вдоль длинной оси 82, и по меньшей мере второй ультразвуковой преобразователь, чтобы испускать акустическое излучение вдоль оси 83, которая наклонена относительно длинной оси. Определяют длину акустического пути между пропускающим элементом и первым ультразвуковым преобразователем и определяют длину акустического пути между пропускающим элементом и по меньшей мере вторым ультразвуковым преобразователем, и тем самым определяют изменения длины акустического пути вдоль длинной оси и по меньшей мере вдоль оси, которая наклонена относительно длинной оси. В проиллюстрированном варианте осуществления показаны два преобразователя, однако можно использовать три или более. В частности, три преобразователя можно благоприятно использовать для того, чтобы определять изменения длины акустического пути по трем пространственным осям для определения трехмерного смещения кончика катетера. В варианте осуществления катетер может осуществлять мониторинг под несколькими углами наблюдения, используя жидкую линзу или несколько одноэлементных преобразователей. Контактное усилие можно определить так же, как при использовании одного преобразователя. Его можно вычислять напрямую, если зависимость между всеми ΔL и контактным усилием определена четко. Иначе можно использовать таблицу соответствия.
В проиллюстрированном варианте осуществления медицинское устройство дополнительно содержит сжимаемую муфту 84, расположенную между пропускающим элементом и удлиненным корпусом. Контактное давление меняет расстояние 82, 83 между абляционным электродом и каждым ультразвуковым преобразователем; в случае жидкой линзы, оно меняет профиль абляционного электрода на изображении в B-режиме. Как проиллюстрировано на фиг.8B, если контактное давление перпендикулярно оси катетера, то сжимаемая муфта 85, 86 деформируется слегка, и кончик катетера смещается слегка в сторону (в иллюстративных целях на фиг. угол сгиба сильно преувеличен). Ожидают, что деформация муфты составит самое большее 0,5 мм вне оси (при максимальном ожидаемом контактном давлении ~50 г), которое не достаточно значительно ни чтобы влиять на контакт кончика катетера с тканью, ни чтобы изменить свойства обращения с катетером.
В варианте осуществления терапевтическое воздействие для лечения функционально связано с блоком контроллера, чтобы терапевтическое воздействие лечения можно было контролировать для приведения в действие в предварительно установленном диапазоне контактных усилий.
На фиг.9 схематически проиллюстрирована блочная схема контура обратной связи, которую можно использовать для автоматического регулирования абляционной мощности, прикладываемой через кончик катетера, на основе контактного усилия между кончиком катетера и тканью. Исследователи Yokoyama et al., указанные в разделе о предпосылках изобретения, обнаружили, что абляционную мощность, которую можно безопасно подавать в ткань, сильно зависит от контактного усилия; в их исследовании при умеренной РЧ мощности (30 Вт) хлопки пара возникали только при контактном усилии 0,4 Н или более, тогда как при 50 Вт хлопки пара возникали при контактном усилии лишь 0,1 Н (и, кроме того, частота хлопков пара возрастала значительно с увеличением усилия). На основе этого можно использовать контур обратной связи, в котором подаваемая мощность обратно пропорциональна установке мощности. На фиг.9 схематически проиллюстрирована реализация 91 зависимости между оптимальной установкой мощности (вертикальная ось) и контактным усилием (горизонтальная ось). Проиллюстрирована обратная линейная зависимость, в целом конкретную зависимость следует оптимизировать посредством экспериментов на животных, и она не обязательно будет носить обратный линейный характер. При использовании зависимость 91 между оптимальной установкой энергии и контактным усилием можно определять на основе вычисления, выполненного посредством блока контроллера или вычислительного блока в блоке контроллера или соединенного с ним.
На фиг.9 измеряют 90 контактное усилие и на основе этого измерения определяют 93 оптимальную установку мощности. В варианте осуществления рабочую мощность абляционного электрода устанавливают 92 на оптимальную мощность при измеренном контактном усилии и контактное усилие измеряют снова.
В другом варианте осуществления контур обратной связи используют, чтобы контролировать, чтобы максимальная мощность не превышала оптимальную мощность. Таким образом, если фактическая используемая мощность 94 выше оптимальной мощности при конкретном контактном усилии, то рабочую мощность снижают 95 до оптимальной мощности, поскольку контактное усилие слишком велико.
На фиг.10 проиллюстрирована блок-схема некоторых операций, которые можно осуществлять для того, чтобы приводить медицинское устройство в действие в соответствии с вариантами осуществления настоящего изобретения. Сперва медицинское устройство можно расположить 100 в области, представляющей интерес, например, в непосредственной близости от сердечной ткани, чтобы пройти лечение абляцией. Преобразователи приводят в действие для того, чтобы генерировать 101 акустическое излучение и обнаруживать 102 отраженное акустическое излучение. Преобразователи можно приводить в действие непрерывно 103 во время исследования и лечения. Отраженное акустическое излучение определяют для того, чтобы осуществлять мониторинг 104 области, представляющей интерес, во время процедуры, и по отраженному акустическому излучению также определяют длину акустического пути, чтобы определить контактное усилие 105. Одновременно с мониторингом и определением контактного усилия, терапевтическое воздействие для лечения можно приводить в действие 106 для того, чтобы осуществлять медицинское лечение. Например, ткань, которую лечат, может подвергаться абляции.
Раскрыты сжимаемые элементы различных типов. Следует понимать, что даже если некоторые признаки раскрыты в связи с конкретными вариантами осуществления, признаки, раскрытые для одного из вариантов осуществления, можно в рамках формулы изобретения комбинировать с признаками, раскрытыми для другого варианта осуществления.
На фиг.11 схематически проиллюстрирована медицинская система в связи с компьютерным программным продуктом. Медицинская система содержит катетер в соответствии с вариантами осуществления настоящего изобретения. Катетер содержит удлиненный корпус 3, который имеет проксимальный конец 110, область дистального конца 1 и продольную ось 9 вдоль удлинения. Кроме того, катетер содержит один или несколько ультразвуковых преобразователей, расположенных в области дистального конца, и пропускающий элемент 5, расположенный в оконечности удлиненного корпуса, чтобы вводить акустическое излучение в катетер и выводить из него.
На проксимальном конце 110 катетер может быть соединен с блоком контроллера 111, таким как вычислительный блок специального назначения или общего назначения, для управления по меньшей мере ультразвуковым преобразователем(ями) и для обработки сигналов и получения результатов определения. С этой целью определением длины акустического пути между ультразвуковым преобразователем и пропускающим элементом и определением контактного усилия по установленной длине акустического пути управляет блок контроллера 111.
В блоке контроллера можно реализовать компьютерную систему 112, такую как вычислительный блок специального назначения или общего назначения, для управления системой. Компьютерная система может содержать средство 113 хранения для хранения данных, которые могут быть нужны для приведения в действие медицинской системы или для хранения каких-либо полученных данных, или для какой-либо другой цели, где желательно хранить данные. Вычислительную систему можно адаптировать к получению инструкций от компьютерного программного продукта 114 для того, чтобы приводить в действие систему. Компьютерный программный продукт может находиться на носителе данных, как проиллюстрировано на фиг.11, однако после загрузки в компьютерную систему, его можно хранить с помощью средства 113 хранения и запускать из него.
Несмотря на то что изобретение подробно проиллюстрировано и описано на чертежах и в предшествующем описании, такие иллюстрации и описание следует толковать как иллюстративные или примерные, а не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления. Специалисты в данной области могут понять и, при практическом осуществлении, выполнить другие изменения раскрытых вариантов осуществления описываемого в заявке изобретения, изучив чертежи, описание и приложенную формулу изобретения. В формуле изобретения слово «содержит» не исключает других элементов или стадий, и формы единственного числа не исключают множественного числа. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих мер нельзя применить с пользой. Компьютерную программу можно хранить/распространять на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемый вместе с или в качестве части другого аппаратного обеспечения, но также ее можно распространять в других формах, например через Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема.
Реферат
Изобретение относится к медицинской технике, а именно к ультразвуковым средствам для определения усилия. Устройство содержит удлиненный корпус, один или более ультразвуковых преобразователей для генерации акустического излучения, размещенные в области дистального конца корпуса, внутри него, пропускающий элемент, расположенный по ходу лучей акустического излучения, причем пропускающий элемент является по существу прозрачным для акустического излучения. Пропускающий элемент и один или несколько ультразвуковых преобразователей установлены так, чтобы длина акустического пути между пропускающим элементом и ультразвуковым преобразователем варьировалась вместе с контактным усилием, приложенным к области дистального конца. Медицинская система содержит устройство и блок контроллера, соединенный сним. Блок контроллера определяет длину акустического пути между ультразвуковым преобразователем и пропускающим элементом и контактное усилие по установленной длине акустического пути. Способ работы устройства состоит в генерации акустического излучения посредством приведения в действие одного или нескольких преобразователей, обнаружении отраженного акустического излучения, определении длины акустического пути между пропускающим элементом и ультразвуковым преобразователем по отраженному акустическому излучению и определении контактного усилия по установленной длине акустического пути. Машиночитаемый носитель обеспечивает управление медицинским устройством. Использование изобретения позволяет повысить точность определения контактного усилия. 4 н. и 11 з.п. ф-лы, 11 ил.
Формула
удлиненный корпус (3), имеющий проксимальный конец (110),
область дистального конца (1) и продольную ось (9) вдоль удлинения;
один или более ультразвуковых преобразователей (4, 80, 81) для генерации акустического излучения, указанные один или более ультразвуковых преобразователей размещены в области дистального конца, внутри удлиненного корпуса;
пропускающий элемент (5), расположенный по ходу лучей акустического излучения, причем пропускающий элемент является по существу прозрачным для акустического излучения;
при этом пропускающий элемент и один или несколько ультразвуковых преобразователей установлены так, чтобы длина акустического пути (8) между пропускающим элементом и ультразвуковым преобразователем варьировалась вместе с контактным усилием (10), приложенным к области дистального конца.
удлиненный корпус (3), имеющий проксимальный конец (110), область дистального конца (1) и продольную ось (9) вдоль удлинения;
один или более ультразвуковых преобразователей (4, 80, 81) для генерации акустического излучения, указанные один или более ультразвуковых преобразователей размещены в области дистального конца, внутри удлиненного корпуса;
пропускающий элемент (5), расположенный по ходу лучей акустического излучения, причем пропускающий элемент является по существу прозрачным для акустического излучения;
блок контроллера (111), функционально соединенный с ультразвуковым преобразователем;
при этом пропускающий элемент и один или более ультразвуковых преобразователей установлены так, чтобы длина акустического пути (8) между пропускающим элементом и ультразвуковым преобразователем менялась вместе с контактным усилием (10), приложенным к области дистального конца; а блок контроллера определяет длину акустического пути между ультразвуковым преобразователем и пропускающим элементом и определяет контактное усилие по установленной длине акустического пути.
удлиненный корпус (3), имеющий проксимальный конец, область дистального конца (1) и продольную ось (9) вдоль удлинения;
один или более ультразвуковых преобразователей (4, 80, 81) для генерации акустического излучения, указанные один или несколько ультразвуковых преобразователей размещены в области дистального конца, внутри удлиненного корпуса;
пропускающий элемент (5), расположенный по ходу лучей акустического излучения, причем пропускающий элемент является по существу прозрачным для акустического излучения;
указанный способ содержит
генерацию (101) акустического излучения посредством приведения в действие одного или нескольких преобразователей в режиме генерации;
обнаружение (102) отраженного акустического излучения посредством приведения в действие одного или нескольких преобразователей в режиме определения;
определение длины акустического пути между пропускающим элементом и ультразвуковым преобразователем по отраженному акустическому излучению;
определение (105) контактного усилия по установленной длине акустического пути.
Комментарии