Обработка сейсмических данных - RU2344444C2
Код документа: RU2344444C2
Чертежи


Описание
Настоящее изобретение относится к способу обработки многокомпонентных сейсмических данных. В частности, относится к способу обработки сейсмических данных для определения калибровочного фильтра, посредством которого калибруют одну компоненту сейсмических данных относительно другой компоненты сейсмических данных. Изобретение также относится к устройству для обработки сейсмических данных.
На фиг.1 представлен схематичный вид компоновки сейсмической разведки. На этой фигуре компоновка сейсмической разведки представляет собой компоновку морской сейсмической разведки, при проведении которой сейсмическая волна излучается сейсмическим источником 1, который подвешен в толще 2 воды с буксирующего судна 3. В этом примере толщей воды является море, но способы, описанные здесь ниже, могут быть применены к данным, регистрируемым в морской воде или в пресной воде. При возбуждении сейсмического источника 1 сейсмическая волна излучается вниз и обнаруживается группой сейсмических приемников 4, расположенных на ложе 5 моря. (Использованный в настоящей заявке термин «дно моря» означает внутреннюю область земли, а термин «ложе моря» означает поверхность дна моря.)
В настоящее время при проведении сейсмической разведки во многих случаях используют многокомпонентные приемники, с помощью которых записывают две компоненты или большее число компонент сейсмической волны, падающей на приемник. Например, трехкомпонентный сейсмический приемник содержит три ортогональных геофона и поэтому может записывать x-, y- и z-компоненты движения частиц на приемнике (движение частиц может быть смещением частиц, скоростью частиц или ускорением частиц или, в принципе, даже высшей производной смещения частиц). В качестве альтернативы при морской сейсмической разведке может быть использован четырехкомпонентный сейсмический приемник. В дополнение к трем ортогональным геофонам четырехкомпонентный приемник содержит датчик давления (динамического), например гидрофон, и поэтому, когда акустические волны распространяются в толще воды, с его помощью в дополнение к x-, y- и z-компонентам движения частиц дна моря можно записывать флуктуации давления (скалярную величину).
Существуют многочисленные различные пути, по которым при использовании компоновки сейсмической разведки из фиг.1 сейсмическая волна может проходить от источника 1 к приемнику 4. На фиг.1 схематично показаны несколько путей.
Путь 6, показанный на фиг.1, известен как «путь прямой звуковой волны». Сейсмическая волна, которая проходит по пути 6 прямой звуковой волны от источника 1 до приемника 4, проходит, по существу, по прямой линии, не претерпевая отражения от какой-либо границы раздела.
Путь 7 на фиг.1 является примером «пути кратной волны при отражениях от дна и поверхности моря». Сейсмическая волна, которая следует по пути кратной волны при отражениях от дна и поверхности моря, проходит полностью внутри толщи 2 воды, но претерпевает одно или несколько отражений на поверхности толщи воды и/или на ложе 5 моря, так что сейсмическая волна проходит через толщу воду более чем один раз. Путь 7 кратной волны при отражениях от дна и поверхности моря, показанный на фиг.1, включает в себя одно отражение на ложе 5 моря и одно отражение на поверхности толщи воды, но могут быть и многие другие пути кратной волны при отражениях от дна и поверхности моря.
Путь 8 на фиг.1 является примером «пути волны при преломлении под критическим углом». Сейсмическая волна, которая следует по пути 8, проходит вниз к ложу 5 моря и проникает во внутреннюю область 10 земли (то есть в дно моря). Сейсмическая волна продолжает распространяться вниз до тех пор, пока не достигает границы 11 между двумя слоями грунта, которые имеют различный акустический импеданс. Сейсмическая волна претерпевает преломление под критическим углом, проходит вдоль границы 11 до того, как в конце концов преломляется вверх по направлению к приемнику 4. Преломление под критическим углом может также происходить на границе раздела воды и дна моря, и проходящая вниз сейсмическая волна, которая преломляется таким образом, будет распространяться вдоль границы раздела воды и дна моря, а затем будет проходить в толще воды вверх.
Путь 9, показанный на фиг.1, известен как «путь однократно отраженной волны». Сейсмическая волна, которая следует по пути 9 при однократном отражении, проходит вниз через толщу воды, преломляется на ложе 5 моря и проходит вниз через внутреннюю область земли. Сейсмическая волна преломляется на границе 11, но преломляется не критически и поэтому продолжает распространяться вниз в землю. В конце концов она претерпевает отражение на геологической структуре 12, которая действует как поверхность, частично отражающая сейсмическую волну, а отраженная сейсмическая волна после дополнительного преломления в то время, как она проходит вверх через границу 11, падает на приемник 4. Главная задача сейсмической разведки заключается в обеспечении возможности использования сейсмической волны, которая следует по пути волны при однократном отражении, для получения информации о внутренней структуре земли.
В зависимости от местоположения приемника и от оси синфазности волны сейсмическая волна, регистрируемая на приемнике, может содержать проходящую вверх и/или вниз сейсмическую волну. Например, сейсмическая волна, которая проходит по пути 8 волны при преломлении под критическим углом, показанному на фиг.1, при падении на границу раздела воды и дна моря (в случае прохождения вверх) будет частично передаваться в толщу воды, а частично отражаться назад в дно 10 моря. Поэтому вступление преломленной волны под критическим углом выше ложа 5 моря будет включать в себя только проходящую вверх сейсмическую волну, но ниже ложа 5 моря оно будет содержать сейсмическую волну, проходящую как вверх, так и вниз. Тогда как в другом примере сейсмическая волна, которая проходит по пути 6 прямой волны, показанному на фиг.1, при падении на границу 5 раздела воды и дна моря будет частично проходить внутрь дна моря и частично отражаться обратно в толщу воды. Следовательно, вступление прямой волны выше ложа моря будет включать в себя сейсмическую волну, проходящую как вверх, так и вниз, а ниже ложа моря будет содержать только проходящую вниз сейсмическую волну. Поэтому часто представляет интерес разделение сейсмических данных, зарегистрированных на приемнике 4, на восходящую составляющую и нисходящую составляющую выше и ниже ложа 5 моря. Например, при четырехкомпонентной сейсмической разведке может представлять интерес разделение давления и вертикальной скорости частиц, записанных на приемнике, на соответствующие им восходящие и нисходящие составляющие выше ложа моря.
Были предложены различные фильтры, которые делают возможным разделение сейсмических данных на восходящую и нисходящую составляющие. Один пример можно найти в: Schalkwijk K.M. et al., "Application of two-step decomposition to multi-component ocean-bottom data: Theory and case study", J. Seism. Expl., vol. 8, pp.261-278 (1999), где показано, что нисходящая и восходящая составляющие давления чуть выше ложа моря могут быть выражены в виде


где P - давление, зарегистрированное на приемнике;
P- - восходящая составляющая давления выше ложа моря;
P+ - нисходящая составляющая давления выше ложа моря;
f - частота;
k - горизонтальное волновое число;
νz - вертикальная компонента скорости частиц, зарегистрированная на приемнике;
ρ - плотность воды;
q - вертикальная медленность в водном слое.
Как можно видеть, из выражения в уравнении (1) следует объединить две компоненты сейсмических данных, регистрируемых на приемнике. Эти фильтры являются примером для случая, когда необходимо объединять две компоненты регистрируемых сейсмических данных. Кроме того, может возникнуть необходимость объединения двух или большего числа компонент регистрируемых сейсмических данных для разделения регистрируемых сейсмических данных на компоненты p-волны и s-волны (продольной волны и поперечной волны) или для исключения из сейсмических данных вступлений волн при кратных отражениях от поверхности моря.
Одна проблема, возникающая при объединении различных компонент сейсмических данных, зарегистрированных на приемнике, заключается в том, что различные компоненты сейсмических данных не могут быть точно прокалиброваны относительно друг друга. В особенности это относится к случаю, когда две компоненты, подлежащие объединению, представляют собой, как в уравнении (1), давление и вертикальную скорость частиц. Обычно существуют различия в характеристиках связи или в импульсных характеристиках гидрофона, используемого для регистрации давления, и геофона, используемого для регистрации вертикальной скорости частиц. По причине этих различий необходимо прокалибровать данные до того, как давление и вертикальная скорость частиц могут быть объединены, и этот процесс известен как «P/νz-калибровка». Этот процесс калибровки включает в себя создание калибровочного фильтра, который компенсирует различия в связи и импульсной характеристике между гидрофоном и вертикальным геофоном, и затем применение фильтра к одному массиву данных для компенсации различий в связи.
Schalkwijk с соавторами и другие исследователи предположили, что проблема калибровки P/νz может быть решена при условии точной записи одной компоненты сейсмических данных и калибровки другой компоненты сейсмических данных относительно компоненты, которая предполагается точно записанной. В общем случае при этом предполагается, что гидрофон хорошо связан с полем сейсмических волн, так что регистрация давления получается точной. Затем вертикальную компоненту скорости частиц калибруют относительно давления для компенсирования различия в связи и импульсной характеристике между гидрофоном и вертикальным геофоном. Schalkwijk и соавторы предположили, что приведенное выше уравнение (1) должно быть видоизменено путем применения калибровочного фильтра к вертикальной скорости частиц. Они предложили видоизменить приведенное выше уравнение для нисходящей составляющей давления выше ложа моря и записать его в следующем виде:

В уравнении (2) a(f) характеризует частотно-зависимый калибровочный фильтр. Остальные члены в уравнении (2) имеют то же самое значение, что и в уравнении (1).
Способ для определения калибровочного фильтра a(f), который предложили Schalkwijk и соавторы, заключается в нахождении калибровочного фильтра, который минимизирует энергию нисходящей составляющей давления выше ложа моря для части сейсмических данных, которые содержат только однократные отражения. Сейсмическая волна, проходящая по пути волны при однократном отражении, проходит чуть выше ложа моря возле места расположения приемника, так что нисходящая составляющая давления чуть выше ложа моря должна быть нулевой в случае однократных отражений. Schalkwijk и соавторы использовали метод наименьших квадратов для нахождения калибровочного фильтра, который минимизирует энергию нисходящей составляющей давления в окне, содержащем только вступления волн при однократном отражении. После определения таким способом калибровочного фильтра a(f) его применяют ко всему массиву данных для калибровки вертикальной скорости частиц.
Существование различных путей прохождения сейсмической волны от источника до приемника означает, что данные, регистрируемые на приемнике при реальной сейсмической разведке, будут содержать вступления, соответствующие более чем одному возможному пути. Эти вступления будут наблюдаться в различные моменты времени после возбуждения сейсмического источника 1, поскольку различным путям прохождения сейсмической волны соответствуют различные времена пробега. Чтобы применить способ для определения калибровочного фильтра, который предложили Schalkwijk и соавторы, необходимо выделить во временном окне данные, которые содержат только однократно отраженные волны.
Способ, который предложили Schalkwijk и соавторы, имеет недостаток, заключающийся в том, что временное окно, содержащее только вступления однократно отраженных волн, должно выбираться вручную. Вступления однократно отраженных волн не являются первыми вступлениями, регистрируемыми на приемнике после возбуждения источника, и поэтому не могут быть выбраны автоматически. Еще один недостаток заключается в том, что в некоторых случаях, например, если сейсмический источник формирует продолжительный импульс, может оказаться трудным проведение различия между вступлением прямой волны и вступлениями однократно отраженной волны, вследствие чего может оказаться трудным выделение подходящих вступлений. Кроме того, в условиях мелководья вступления кратных волн, отраженных от дна и поверхности моря, могут приходить вскоре после прямой волны. В этом случае получение a(f) основано на очень ограниченном количестве данных, что снижает точность результатов. Вступление прямой волны и вступления кратных волн при отражениях от дна и поверхности моря содержат проходящую вниз сейсмическую волну, так что использование временного окна, которое по недосмотру охватывает вступление прямой волны или вступления кратных волн при отражениях от дна и поверхности моря, не приведет к получению правильных результатов для калибровочного фильтра.
В заявке, находящейся одновременно на рассмотрении, 0200560.1 на патент Великобритании и в Международной заявке PCT/GB 03/00052, находящихся в процессе одновременного рассмотрения, предложено применить способ, который предложили Schalkwijk и соавторы, к временному окну, содержащему преломленные волны под критическим углом, которые к тому же содержат только восходящие волны выше ложа моря. При использовании пропикированных первых вступлений такая процедура более пригодна для автоматизации.
Ball V.L. и Corrigan D. в "Dual sensor summation of noisy ocean-bottom data", 66th Ann. Internat. Mtg: Soc. of Expl. Geophys., 28-31 (1996), предложили калибровку данных вертикального геофона относительно давления путем применения оператора волны-спутника на гидрофоне к νz и оператора волны спутника на геофоне к давлению. Можно показать, что этот способ эквивалентен прогнозированию нисходящего волнового поля продольных волн, отраженных от поверхности моря, по вычисленному волновому полю продольных волн. В таком случае предельное уменьшение разности между прогнозируемым и вычисленным волновыми полями продольных волн, отраженных от поверхности моря, в моменты времени по прошествии времени возбуждения источника и времени распространения в одном направлении через водный слой дает возможность определить требуемый калибровочный фильтр. Существенный недостаток этого способа заключается в необходимости иметь точную информацию о глубине толщи воды в районе разведки.
В другом способе для калибровки данных до проведения различий между давлением и вертикальной скоростью частиц требуется, чтобы сейсмическая волна сохранялась во время прохождения через водный слой. В этом случае зависящие от частоты и волнового числа операторы калибровки находят путем спектрального выравнивания восходящей и нисходящей составляющих волн чуть выше ложа моря.
Согласно настоящему изобретению предложен способ обработки многокомпонентных сейсмических данных, зарегистрированных на приемной станции по сейсмическим сигналам, распространяющимся в среде, и этот способ включает в себя следующие этапы: выбор первой части сейсмических данных; и определение калибровочного фильтра по первой части сейсмических данных, при этом калибровочный фильтр предназначен для калибровки первой компоненты сейсмических данных относительно второй компоненты сейсмических данных; в котором этап определения калибровочного фильтра содержит обработку данных в области с общим пунктом возбуждения.
Термин «приемная станция» может обозначать, например, единственный приемник (например, при регистрации сейсмических данных единственным датчиком), группу жестко связанных приемников и так далее.
Изменения связи и инструментальной характеристики отдельного сейсмического приемника или приемной станции относятся к присущим приемнику эффектам, то есть как только многокомпонентный приемник размещен, необходимый для приемника оператор калибровки является постоянным и не зависит от положения источника. Поэтому до настоящего времени калибровку приемника осуществляли в зоне с общим пунктом приема. Когда сейсмические данные обрабатывают в зоне с общим пунктом приема, все данные, зарегистрированные на одном приемнике, сортируют с образованием «выборки трасс» для этого приемника, и поскольку все данные в выборке трасс с общим пунктом приема были зарегистрированы на одном приемнике, то единственный оператор калибровки может быть использован для корректировки всех данных в выборке трасс, обусловленной изменениями связи и инструментальной характеристики.
Однако заявитель осознал, что оптимизация точности воспроизведения вектора колебаний, регистрируемых многокомпонентными приемниками, в зоне общего пункта возбуждения обеспечивает существенные преимущества, включая:
- в отличие от обработки в зоне с общим пунктом приема при обработке в зоне с общим пунктом возбуждения в явной форме не предполагается, что реальная среда является инвариантной в поперечном направлении;
- возмущения, вызванные сильным волнением, могут быть учтены соответствующим образом;
- можно получить преимущество от плотного размещения приемников при редкой расстановке источников;
- распространяющийся в воде шум, который не создается возбуждением, может быть устранен более эффективно.
Общепринято осуществлять процедуру калибровки в зоне с общим пунктом приема, поскольку это обеспечивает возможность отдельно определять калибровочный фильтр для каждого приемника, но недостаток такой процедуры заключается в том, что возмущения, вызванные сильным волнением, не могут быть учтены соответствующим образом и в том, что фоновый шум не может быть эффективно удален. Кроме того, при обработке в зоне с общим пунктом приема в явной форме предполагается, что реальная подземная среда является инвариантной в поперечном направлении.
К тому же калибровочный фильтр можно применить к сейсмическим данным, записанным на отдельном приемнике или приемной станции, на которой регистрировались сейсмические данные, использованные для определения калибровочного фильтра. Применением калибровочного фильтра компенсируются эффекты различной связи для первой и второй компонент сейсмических данных.
Калибровочный фильтр является специфическим для приемника, так что при сейсмической разведке предпочтительно определять отдельный калибровочный фильтра для каждого приемника (или приемной станции).
Согласно второму объекту изобретения предложен способ сейсмической разведки, включающий в себя следующие этапы: возбуждение источника сейсмической энергии; регистрацию сейсмических данных на приемной станции, отнесенной в пространстве от источника; и обработку данных способом согласно первому объекту изобретения.
Согласно третьему объекту изобретения предложено устройство для обработки многокомпонентных данных, зарегистрированных на приемной станции по сейсмическим сигналам, распространяющимся в среде, и это устройство содержит: средство для определения калибровочного фильтра по первой части сейсмических данных, при этом калибровочный фильтр предназначен для калибровки первой компоненты сейсмических данных относительно второй компоненты сейсмических данных; в котором устройство выполнено с возможностью определения калибровочного фильтра путем обработки сейсмических данных в области с общим пунктом возбуждения.
Устройство может содержать программируемый процессор данных.
Согласно четвертому объекту изобретения предложен носитель данных, содержащий программу для управления программируемым процессором данных для осуществления способа согласно первому или второму объекту.
Согласно пятому объекту изобретения предложена программа для управления компьютером с целью осуществления способа согласно первому или второму объекту.
Предпочтительные признаки изобретения изложены в зависимых пунктах формулы изобретения.
Теперь предпочтительные варианты осуществления настоящего изобретения будут описаны только для иллюстративного примера со ссылками на сопровождающие чертежи, на которых:
фиг.1 - схематичный вид сейсмической разведки;
фиг.2 - схема последовательности операций способа согласно одному варианту осуществления настоящего изобретения;
фиг.3 - схема последовательности операций способа согласно второму варианту осуществления настоящего изобретения;
фиг.4 - структурная схема устройства согласно настоящему изобретению.
Как описано выше, существующие способы калибровки P/νz основаны на нахождении калибровочных фильтров, которые минимизируют восходящую или нисходящую составляющую давления в толще воды (определенную уравнением (2)). Член 1/q(f,k) в уравнении (2) может рассматриваться как пространственный фильтр, и недостаток предшествующих способов, известных из уровня техники, заключается в необходимости вычисления члена 1/q(f,k)[a(f)νz(f,k)]. Поскольку калибровочные фильтры являются функцией положения, операции пространственного фильтра над членом [a(f)νz(f,k)] усложняют вычисление калибровочных фильтров a(f) для каждого отдельного положения пункта приема.
В настоящем изобретении эти недостатки устранены благодаря осуществлению операции пространственного фильтра в области с общим пунктом возбуждения. Этим обеспечивается возможность применения критериев оптимизации к восходящей и нисходящей компонентам скорости частиц и тем самым исключение операций пространственного фильтра над членом [a(f)νz(f,k)].
В изобретении использовано то, что восходящая и нисходящая составляющие вертикальной компоненты скорости частиц в водном слое могут быть выражены как

В уравнении (3) a(f) снова обозначает частотно-зависимый калибровочный фильтр, который осуществляет коррекцию в случае несовершенств при записи νz,


Определение восходящей и нисходящей составляющих вертикальной компоненты скорости частиц включает в себя применение пространственного фильтра q(f,k) к давлению, а не к прокалиброванной вертикальной скорости частиц. В результате при применении согласно уравнению (3) в области с общим пунктом возбуждения операция этого фильтра и операция неизвестного калибровочного фильтра a(f) не влияют друг на друга. Определение калибровочного фильтра в области с общим пунктом возбуждения или выполнение, по меньшей мере, некоторых этапов определения калибровочного фильтра в области с общим пунктом возбуждения обеспечивает возможность определения калибровочных фильтров на основании восходящей и нисходящей компонент скорости частиц в соответствии с уравнением (3) и, следовательно, существенно упрощает обработку.
Дополнительное преимущество от использования уравнения (3) заключается в том, что оператор 1/q(f,k) фильтра, использованный в уравнении (2), содержит полюс. В противоположность этому оператор q(f,k) фильтра в уравнении (3) не имеет полюса, а просто содержит нуль. В результате способы, основанные на уравнении (3), являются численно более устойчивыми и облегчают использование пространственно компактных аппроксимаций фильтров. Использование пространственно компактных аппроксимаций фильтров является выгодным при обработке данных, регистрируемых на месте разведки, когда в поперечном направлении имеются значительные вариации параметров земной поверхности.
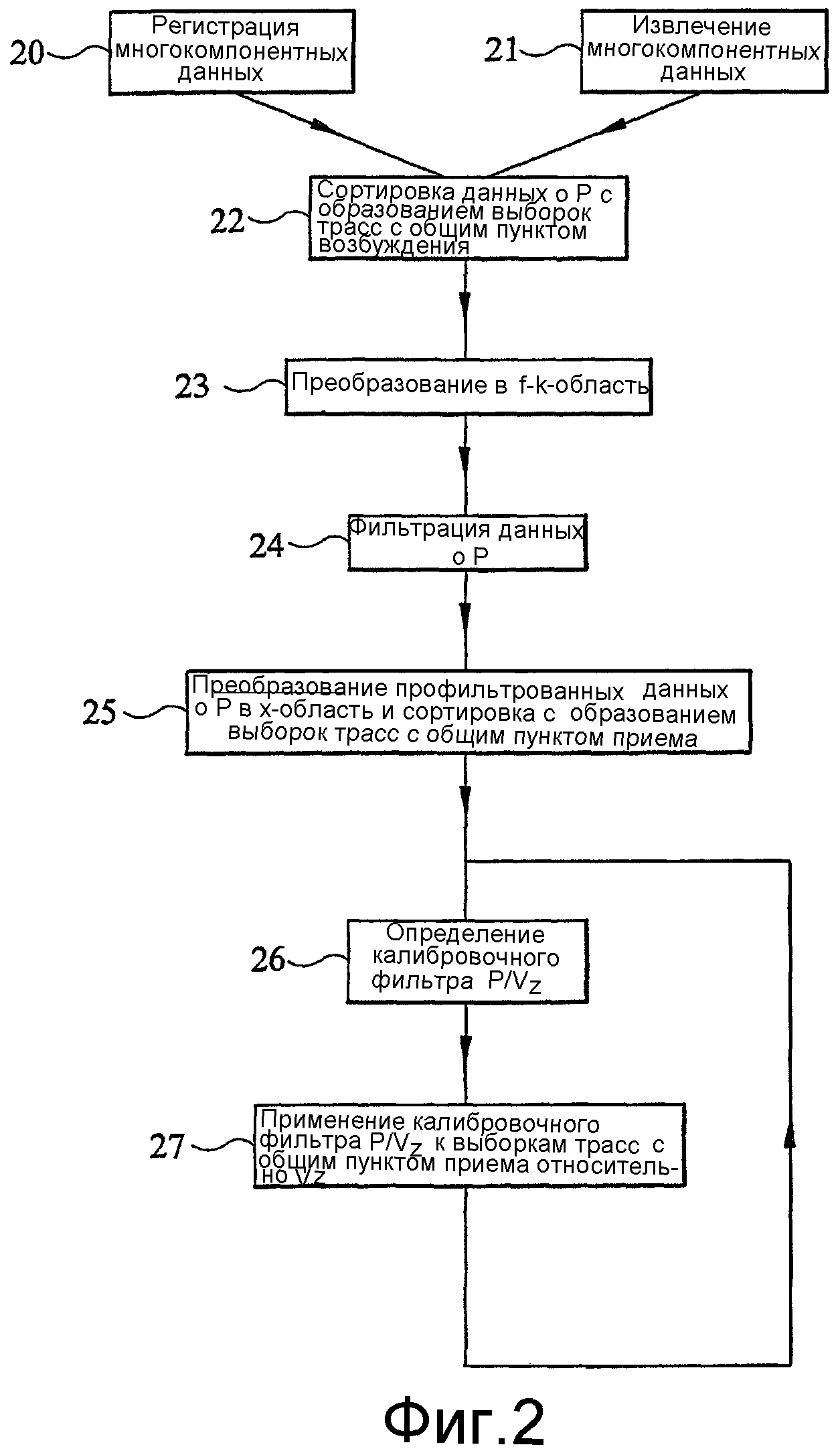
На фиг.2 показан один способ определения калибровочного фильтра в области общего пункта возбуждения. Этот пример описан применительно к калибровке P/νz, но, как предположил Schalkwijk с соавторами (см. выше), аналогичную процедуру можно также выполнить для калибровки P/νx при условии, что упругие свойства дна моря известны.
Способ, показанный на фиг.2, основан на методиках калибровки P/vz, которые предложил Schalkwijk с соавторами (см. выше) и которые предложены в одновременно рассматриваемой заявке 0200560.1 на патент Великобритании. В способе из фиг.2 частотно-зависимый калибровочный фильтр определяют путем минимизации энергии нисходящей составляющей
Вначале на этапе 20 регистрируют многокомпонентные сейсмические данные. В этом варианте осуществления многокомпонентные сейсмические данные содержат, по меньшей мере, записи давления и записи вертикальной скорости частиц.
В качестве альтернативы изобретение может быть применено к уже существующим сейсмическим данным. В этом случае этап 20 заменяют этапом 21 извлечения из запоминающего устройства многокомпонентных сейсмических данных, содержащих, по меньшей мере, записи давления и записи вертикальной скорости частиц.
Затем на этапе 22 данные о давлении сортируют с образованием выборок трасс с общим пунктом возбуждения. Каждая выборка трасс должна содержать все данные о давлении, зарегистрированные для конкретного пункта возбуждения, когда данные регистрировали, используя компоновку сейсмической разведки, показанную на фиг.1, например, одна выборка трасс должна содержать данные о давлении, записанные тогда, когда источник 1 возбуждался на одном местоположении, схематично обозначенном позицией 13 на фиг.1, другая выборка трасс должна содержать все данные о давлении, зарегистрированные тогда, когда источник находился в другом местоположении, схематично обозначенном позицией 13а, и так далее. Каждая выборка трасс должна содержать данные о давлении, зарегистрированные на всех приемниках 4 в компоновке сейсмической разведки. Данные о давлении, зарегистрированные с помощью приемника, обычно должны быть в виде записи давления на приемнике, измеренного в зависимости от времени после возбуждения сейсмического источника 1. То есть, в случае, когда источники и приемники расположены на прямой линии, записи Р (положение приемника, t) с каждого приемника могут быть упрощены до P(x,t).
Далее на этапе 23 в этом варианте осуществления изобретения данные о давлении преобразуют в частотно-волновую числовую область (f-k) для получения P(f,k). Преобразование в частотно-волновой числовой области можно осуществить, используя любую подходящую процедуру. Однако изобретение не ограничено f-k-областью, и способ согласно изобретению может быть использован в других областях, например в x-t-области, x-f-области, k-t-области, k-f-области, области наклонного суммирования и так далее.
Затем на этапе 24 осуществляют пространственную фильтрацию данных о давлении. То есть, фильтр q(f,k) применяют к данным о давлении для получения профильтрованных данных q(f,k)P(f,k) о давлении. Фильтр q(f,k) получают на основании сейсмических данных, зарегистрированных на этапе 20 или извлеченных на этапе 21, и это можно сделать, используя известную из уровня техники процедуру. Кроме того, профильтрованные данные о давлении можно определить путем вычислений, используя любой известный алгоритм. Этот этап пространственной фильтрации осуществляют по каждой записи давления в выборке трассы с общим пунктом возбуждения, а затем этот процесс повторяют для всех выборок трасс с общим пунктом возбуждения.
На этапе 25 профильтрованные записи давления преобразуют обратно в x-область, например в f-x-, τ-x- или t-x-область. Затем профильтрованные записи давления сортируют с образованием выборок трасс с общим пунктом приема. Каждая выборка трасс с общим пунктом приема содержит (профильтрованные) записи давления, зарегистрированные только на одном приемнике или на одной приемной станции.
На этапе 26 частотно-зависимый калибровочный фильтр a(f) определяют для одной выборки трасс с общим пунктом приема на основании части сейсмических данных в этой выборке трасс. В этом варианте осуществления изобретения калибровочный фильтр определяют, используя уравнение (3), путем нахождения калибровочного фильтра, который минимизирует восходящую или нисходящую составляющую вертикальной скорости частиц для временного окна, в котором, как ожидается, эта составляющая равна нулю. (Хотя уравнение (3) записано в f-k-области, соответствующее уравнение существует в x-области.) Например, выбранное временное окно может быть временным окном, которое, как прогнозируется, содержит только восходящую сейсмическую волну чуть выше ложа моря, такое, как временное окно, которое содержит только однократно отраженные волны, или временное окно, которое содержит только волны, преломленные под критическим углом. Когда выбирают временное окно, которое, как ожидается, содержит только восходящие сейсмические волны, калибровочный фильтр определяют путем нахождения фильтра, который минимизирует нисходящую составляющую вертикальной скорости частиц в выбранном временном окне.
Результатом этапа 26 является калибровочный фильтр для отдельного приемника (или приемной станции), использованного для регистрации данных о давлении в выборке трасс с общим пунктом приема, по которой осуществляют этап 26. Затем на этапе 27 этот калибровочный фильтр может быть использован для калибровки данных о вертикальной компоненте скорости, зарегистрированных на этом приемнике (или на приемной станции). Калибровочный фильтр, определенный для приемника (или приемной станции), может быть применен к данным о вертикальной компоненте скорости за пределами временного окна, использованного для определения калибровочного фильтра, и он может быть использован для калибровки данных о вертикальной компоненте скорости, которые были зарегистрированы на этом приемнике (или на этой приемной станции), но которые не были использованы при определении калибровочного фильтра.
После этого этапы 26 и 27 можно повторить для других выборок трасс с общим пунктом приема для определения калибровочных фильтров для каждого приемника (или приемной станции) в компоновке сейсмической разведки.
Прокалиброванные данные о вертикальной скорости могут быть подвергнуты обработке на дополнительных этапах (не показанных).
В варианте осуществления изобретения согласно фиг.2 этап 23 содержит преобразование данных о давлении в f-k-область. В качестве альтернативы возможно, чтобы этап 23 содержал преобразование данных о давлении в область наклонного суммирования, и в этом случае этап 24 будет включать в себя фильтрацию данных о давлении в области наклонного суммирования.
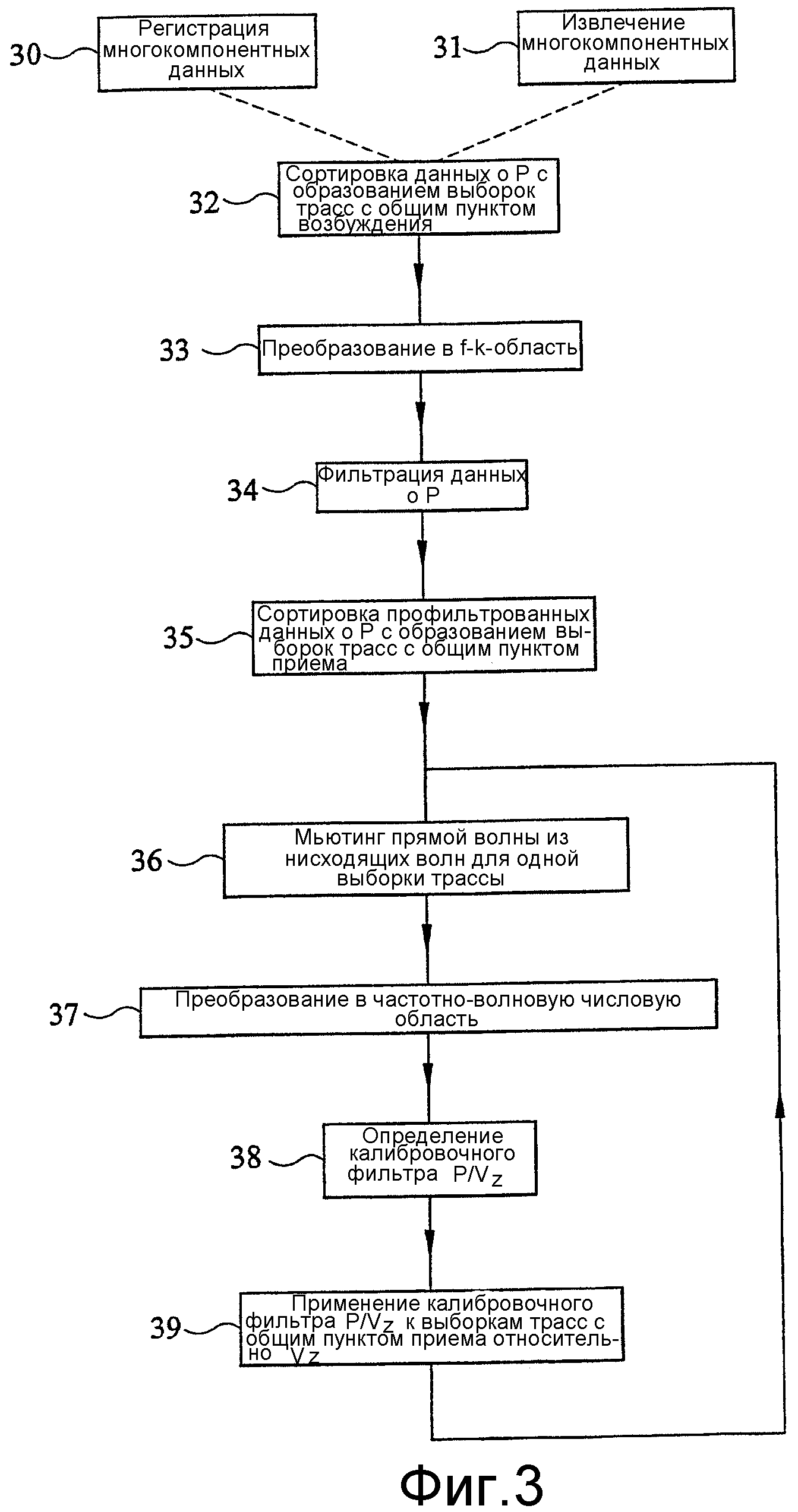
Второй вариант осуществления настоящего изобретения показан на фиг.3 настоящей заявки. Этот вариант осуществления основан на принципе, заключающемся в том, что толща воды не приводит к затуханию сейсмических волн, и в том, что свободная поверхность толщи воды имеет постоянный коэффициент r0 отражения. В результате этого вся энергия восходящих волн в толще воды в некоторое более позднее время должна быть записана как энергия нисходящих волн, но с амплитудой, уменьшенной в соответствии с коэффициентом r0. Исключением из этого принципа является прямая волна 6, поскольку в случае прямой волны 6 имеется энергия нисходящей волны в толще воды, но отсутствует какая-либо энергия восходящей волны. Согласованный с приемником частотно-зависимый калибровочный фильтр может быть определен путем нахождения калибровочного фильтра, который обеспечивает спектральное выравнивание между энергией восходящей волны и энергией нисходящей волны (после удаления или «мьютинга» прямой волны из энергии нисходящей волны). Поэтому калибровочный фильтр определяют как калибровочный фильтр, который минимизирует следующую целевую функцию:

В уравнении (4) W(f,k) является весовой функцией, которая задает частотно-волновое числовое окно, в пределах которого выполняют процесс минимизации,


Используя уравнение (3), члены



Верхний индекс (r) снова указывает на то, что прямая волна удалена.
Мьютинг прямой волны представляет собой известный непосредственный процесс. В сущности, образуют маску для данных, которая имеет нулевое значение в моменты времени, приближенные к приходам прямой волны, и которая равна единице во все другие моменты времени. Затем осуществляют мьютинг прямой волны путем перемножения этой маски и данных. Время вступления прямой волны можно оценить по результатам грубого оценивания геометрии разведки, глубины воды и скорости сейсмической волны. Предпочтительно, чтобы переход между нулем и единицей в маске для данных был сглаженным, а не резким, и он может быть где угодно между временем вступления самой прямой волны и временем вступления кратной волны при отражениях от дна и поверхности моря, поскольку любые однократные волны, которые наблюдаются между этими моментами времени, являются чисто восходящими волнами. Наиболее легко осуществить мьютинг прямой волны в x-t-область или в область наклонного суммирования, и в этом случае производят мьютинг данных о давлении и данных о вертикальной скорости, а затем их преобразуют в f-k-область.
На фиг.3 представлена последовательность операций, иллюстрирующая один пример этого способа. Вначале на этапе 30 регистрируют многокомпонентные сейсмические данные или на этапе 31 извлекают их из запоминающего устройства. Многокомпонентные сейсмические данные содержат, по меньшей мере, записи давления и записи вертикальной скорости частиц.
На этапе 32 записи давления сортируют с образованием выборок трасс с общим пунктом возбуждения. На этапе 33 записи давления преобразуют в f-k-область, а на этапе 34 получают фильтр q(f,k) и для определения величины q(f,k)P(f,k) фильтруют данные о давлении. Этапы 30-34 в основном соответствуют этапам 20-24 способа согласно фиг.2.
На этапе 35 профильтрованные данные о давлении сортируют с образованием выборок трасс с общим пунктом приема.
Затем на этапе 36 отбирают одну конкретную выборку трасс с общим пунктом приема. Далее для этой выборки трасс осуществляют мьютинг данных P(x,t) о давлении и данных νz(x,t) о вертикальной скорости для удаления прямой волны. После этого на этапе 37 обнуленные данные о давлении и данные о вертикальной скорости преобразуют в f-k-область для получения P(r)(f,k) и

На этапе 38 для выбранной выборки трасс с общим пунктом приема определяют частотно-зависимый калибровочный фильтр. Этот калибровочный фильтр определяют как калибровочный фильтр, который минимизирует целевую функцию Е из уравнения (4) или из уравнения (5).
Затем калибровочный фильтр, полученный на этапе 38, может быть использован для калибровки данных о вертикальной скорости, зарегистрированных на приемнике (или на приемной станции), соответствующем выбранной выборке трасс. На фиг.3 это отображено этапом 39.
После этого этапы 36-39 повторяют для других выборок трасс с общим пунктом приема для определения калибровочных фильтров для каждого приемника.
Прокалиброванные данные о вертикальной скорости могут быть подвергнуты обработке на дополнительных этапах (не показанных).
На фиг.2 и 3 показано получение калибровочного фильтра для одной выборки трасс с общим пунктом приема (этап 26, 38) и применение этого калибровочного фильтра к данных для этого пункта приема (этап 27, 39) до определения калибровочных фильтров для других выборок трасс с общим пунктом приема. Нет необходимости всегда осуществлять изобретение таким способом, и можно определять калибровочные фильтры для каждой выборки трасс с общим пунктом приема до применения какого-либо из калибровочных фильтров к данным, зарегистрированным на соответствующем приемнике.
Выше изобретение было описано применительно к калибровке вертикальной компоненты νz скорости по отношению к давлению, но изобретение не ограничено этим случаем. В качестве альтернативы его можно использовать для калибровки горизонтальной компоненты скорости по отношению к давлению.
На фиг.4 приведена структурная схема программируемого устройства 14 согласно настоящему изобретению. Устройство содержит программируемый процессор 15 данных с запоминающим устройством 16 для хранения программ, например, в виде постоянного запоминающего устройства (ПЗУ), в котором хранится программа для управления процессором 15 данных, предназначенным для осуществления любого из способов обработки, описанных выше. Устройство также содержит энергонезависимое запоминающее устройство 17 считывания/записи, предназначенное для хранения, например, любых данных, которые должны сохраняться при отсутствии питания. «Рабочее» или сверхоперативное запоминающее устройство для процессора данных снабжено памятью 18 с произвольной выборкой (ОЗУ). Входной интерфейс 19 предусмотрен, например, для приема команд и данных. Выходной интерфейс 20 предусмотрен, например, для отображения информации, относящейся к ходу и к результатам способа. Сейсмические данные для обработки могут быть поданы через входной интерфейс 19 или в качестве альтернативы могут быть извлечены из машинно-считываемого устройства 21 для хранения данных.
Программа для работы устройства и для осуществления способа, описанного здесь выше, хранится в запоминающем устройстве 16 для хранения программ, которое может быть выполнено в виде полупроводникового запоминающего устройства, например в виде хорошо известного из уровня техники постоянного запоминающего устройства. Однако программа может храниться на любом другом подходящем носителе данных, например на магнитном носителе 16а данных, таком как «дискета» или компакт-диск 16b, доступный только для считывания.
Реферат
Изобретение относится к средствам обработки многокомпонентных сейсмических данных. Способ обработки многокомпонентных сейсмических данных, зарегистрированных на приемной станции по сейсмическим сигналам, распространяющимся в среде, содержит следующие этапы: выбор первой части сейсмических данных; и определение калибровочного фильтра по первой части сейсмических данных, при этом калибровочный фильтр предназначен для калибровки первой компоненты сейсмических данных относительно второй компоненты сейсмических данных; в котором этап определения калибровочного фильтра содержит обработку данных в области с общим пунктом возбуждения, причем для осуществления указанного этапа используют согласованные приемник и калибровочный фильтр для калибровки первой компоненты сейсмических данных относительно второй компоненты сейсмических данных, формируемый средством для определения указанного калибровочного фильтра. Указанный способ реализован при помощи соответствующего устройства. Это обеспечивает возможность применения критериев оптимизации к восходящей и к нисходящей составляющим скорости частиц и это проще по сравнению со способами из предшествующего уровня техники, в которых критерии оптимизации применяют к восходящей и к нисходящей составляющим давления. 3 н. и 15 з.п. ф-лы, 4 ил.
Формула





Комментарии