Способ фильтрации сейсмических сигналов и устройство для его осуществления - RU2308743C2
Код документа: RU2308743C2
Чертежи






Описание
Область техники, к которой относится изобретение
Изобретение относится в основном к области геологической разведки и более конкретно к устройству и способу сбора и обработки сейсмических данных.
Уровень техники
Системы сейсмической разведки, использующие стандартные геофоны, акселерометры и гидрофоны, обычно содержат несколько сенсоров, генерирующих сигнал, указывающий на наличие в среде акустической энергии, обычно в форме сейсмической волны. Сейсмическая волна, как правило, генерируется энергетическим источником, таким как установленный на грузовике вибратор, взрыв или, в случае с гидрофонной системой, пневматическая пушка (пневматический источник сейсмических сигналов). Эти вызванные сейсмической волной сигналы поступают затем на схему (плату) сбора данных/преобразования сигнала. С помощью схемы сбора данных/преобразования сигнала аналоговые сигналы от одного или более удаленных сейсмических сенсоров (гидрофонов, геофонов или других сейсмоприемников) записываются и преобразовываются в ряды цифровых значений. Типичная плата сбора данных/преобразования сигнала конфигурируется таким образом, чтобы удовлетворять требуемой скорости записи данных, использовать любой цифровой фильтр или любой другой метод обработки оцифрованного сигнала, а также для проведения диагностики.
Одна или более схем сбора данных/преобразования сигнала собираются в блок сбора данных. Каждый блок сбора данных сохраняет ряды численных данных от всех сейсмических сенсоров, соединенных со схемами сбора данных/преобразования сигнала. Блок сбора данных передает информацию в системный контроллер, который может включать и сейсмозаписывающее устройство.
Сейсмические (акустические) волны содержат множество различных составляющих. Они включают Р (продольные) и S (поперечные или сдвиговые) волны, которые характеризуются различными временами вступления на детекторе (различными скоростями). Различные геологические события характеризуются сигналами разных частот. Соответственно, вертикальная и горизонтальная компоненты сигнала в конечных временных окнах не коррелируют между собой.
Другие сейсмические сигналы являются нежелательным шумом. Одна из разновидностей шума известна как "поверхностные волны" (ground roll). Поверхностные волны одновременно и с одними и теми же частотами проявляется на вертикальной и горизонтальной компонентах записи. Эти компоненты поляризованы под углом в 90° друг к другу. Таким образом, вертикальная и горизонтальная компоненты шума коррелируют друг с другом в конечном временном окне.
Поверхностные волны генерируются при включении акустического излучателя. Акустическая волна отражается от неглубоких препятствий так же, как и от границ объекта поиска на глубине. Отраженные от неглубоких препятствий волны имеют большую в сравнении с отраженными от цели на глубине амплитуду и иногда приходят к поверхностному приемнику одновременно с полезным сигналом. Многие стандартные системы имеют приемные характеристики, близкие к характеристикам шума, поэтому шум оказывает нежелательное воздействие на процесс сбора сейсмических данных. Чтобы подавить поверхностные волны, широко распространена практика монтажа группы определенно расположенных геофонов (в виде измерительной сети) для использования того факта, что частоты шума отличаются от частот полезного сигнала (по крайней мере, за счет ограничения полосы частот), кроме того, шум имеет большую величину амплитуды и дисперсии. Однако монтаж геофонов в виде измерительной сети сам по себе приводит лишь к ограниченному снижению влияния поверхностных волн. Кроме того, низкая скорость поверхностных волн предъявляет жесткие требования к пространственным характеристикам съемки при желании осуществлять подавление шума с использованием традиционных методов (цифровой) фильтрации, таких как фильтрация методом "частота - волновое число" (FK).
Поляризационные фильтры относятся к широкой категории фильтров, в которых распознавание и отделение поверхностных волн основано на том факте, что в этих волнах частицы твердого тела совершают движение по эллиптическим траекториям. Однако применение даже нескольких поляризационных фильтров дает ограниченный эффект из-за дисперсной природы поверхностных волн и из-за погрешностей в допущениях о локальной геологической структуре среды.
Адаптивные системы, как правило, характеризуются способностью к переменной во времени настройке с использованием динамической оценки шума на входе. Однако известные методы адаптивной фильтрации не включают возможности использования вертикальной и горизонтальной компонент сигнала от одного и того же многоосного сенсора. Соответственно, типичные методы фильтрации не позволяют отличить поверхностные волны от других волн и могут отфильтровать полезный сигнал вместе с поверхностными волнами. И наконец, типичные системы не дают возможности понижать влияние поверхностных волн от станции к станции (station-by-station), поскольку используют в основном пространственные данные и монтаж приемников в виде пространственной измерительной сети.
Раскрытие изобретения
Настоящее изобретение направлено на решение вышеперечисленных проблем обычных систем сбора сейсмических данных обеспечения системы, содержащей множество полевых блоков, включающих один или более сейсмических излучателей, один или более многоосных сейсмических сенсоров для регистрации акустических волн, генерируемых излучателями и отраженных подземными структурами, блок сбора данных, приемник/излучатель и процессор центрального контроллера, устанавливаемый на удалении от одного или более полевых блоков. Процессор использует алгоритм адаптивной фильтрации, позволяющий обрабатывать вертикальную и горизонтальную компоненты сигнала с сенсора с использованием начальных коэффициентов фильтра, адаптированных для оценки изменений шума. Подбор коэффициентов осуществляется опытным путем с помощью последовательного анализа выборок данных (sample-by-sample). В предпочтительном исполнении начальные коэффициенты фильтрации хранятся в запоминающем устройстве (средстве хранения) контроллера.
В соответствии с настоящим изобретением способ обработки данных включает два этапа. Первый этап заключается в создании фильтра, при котором определяются зависимые от сдвига (фаз) временные окна (окна приложений) на основе мгновенного значения разницы фаз вертикальной и горизонтальной компонент сигнала. Полоса частот может быть выбрана с использованием фильтра полосы пропускания частот. Второй этап заключается в применении адаптивного фильтрующего процесса (алгоритма) с использованием метода наименьший-средний-квадрат (LMS - least-mean-square) к данным внутри окна и к временному интервалу, заключенному в окне.
Соответственно предлагается способ фильтрации сейсмических сигналов в системе сейсморазведки, в котором принимают (регистрируют) посредством детектора акустическую (звуковую) волну, передают с детектора первый и второй сигналы, которые представляют собой пространственные компоненты принятой акустической волны, и осуществляют обработку первого сигнала в процессе адаптивной фильтрации, включающем формирование сигнала обратной связи, представляющего собой выбранную часть первого сигнала, сложенную со вторым сигналом.
Определение выбранной части первого сигнала предпочтительно осуществляют, по крайней мере частично, посредством использования предварительно определенных параметров окна для выходного сигнала процесса адаптивной фильтрации или, по крайней мере частично, посредством использования частотного фильтра для выходного сигнала процесса адаптивной фильтрации. При определении параметров окна осуществляют выбор зависимого от сдвига фаз временного окна на основе, по крайней мере частично, разницы фаз вертикальной и горизонтальной компонент акустической волны.
Первый и второй сигналы предпочтительно представляют собой сигналы с углом сдвига фаз около 90°. Первый сигнал является горизонтальной компонентой акустической волны, а второй сигнал является вертикальной компонентой акустической волны.
В предпочтительном варианте осуществления изобретения в процессе адаптивной фильтрации из сейсмического сигнала удаляют поверхностные волны.
Предварительно определяемые параметры окна включают параметры фазы и времени.
Предпочтительно, если при осуществлении способа используют адаптивный фильтр, основанный, по крайней мере частично, на начальных коэффициентах фильтрации, и при этом дополнительно осуществляют корректировку начальных коэффициентов фильтрации при использовании адаптивного фильтра в отношении успешно регистрируемых сейсмических волн.
Одна из целей настоящего изобретения заключается в том, чтобы уменьшить или исключить измерительные сети геофонов и подавить поверхностные волны. Предлагаемая в соответствии с настоящим изобретением система не зависит от азимутальных параметров, связанных с конструкцией измерительной сети, содержащей большое число приемников. Настоящее изобретение предоставляет возможность сконструировать систему, использующую как основу конструкции полезный сигнал вместо шума.
Настоящее изобретение обеспечивает эффективное отфильтровывание поверхностных волн без использования сетей сейсмоприемников и продумывания их пространственного расположения, а также понижает зависимость результата от поляризации шума. Устройство для фильтрации сейсмических сигналов в соответствии с настоящим изобретением снабжено детектором, установленным на земле с возможностью приема акустической волны и формирования выходного сигнала, содержащего первый и второй сигналы, представляющие собой пространственные компоненты принятой акустической волны, процессором, соединенным с детектором с возможностью приема первого и второго сигналов и содержащим адаптивный фильтр для обработки первого сигнала в процессе адаптивной фильтрации, включающем формирование сигнала обратной связи, представляющего собой выбранную часть первого сигнала, сложенную со вторым сигналом.
В качестве детектора желательно использовать многоосный детектор, содержащий многоосный акселерометр системы электромеханических микроакселерометров. Предпочтительно также использование частотного фильтра, предназначенного для фильтрации выходного сигнала адаптивного фильтра. В свою очередь частотный фильтр может быть использован в качестве фильтра полосы пропускания частот, например в виде запирающего фильтра.
Устройство может содержать выход сигнала, сформированного посредством процесса удаления поверхностной волны из сейсмического сигнала.
Устройство может также содержать средство хранения начальных коэффициентов фильтрации, используемых, по крайней мере частично, в адаптивном фильтре. При этом начальные коэффициенты фильтрации имеют значения, корректируемые процессором при использовании адаптивного фильтра в отношении успешно регистрируемых сейсмических волн.
Краткое описание чертежей
Новые признаки данного изобретения, так же как и изобретение само по себе, будут наилучшим образом поняты из прилагаемых чертежей и их последующего описания, в которых используется единое обозначение ссылок и в которых:
Фиг.1 представляет схематическое изображение системы сбора сейсмических данных в одном из исполнений в соответствии с настоящим изобретением.
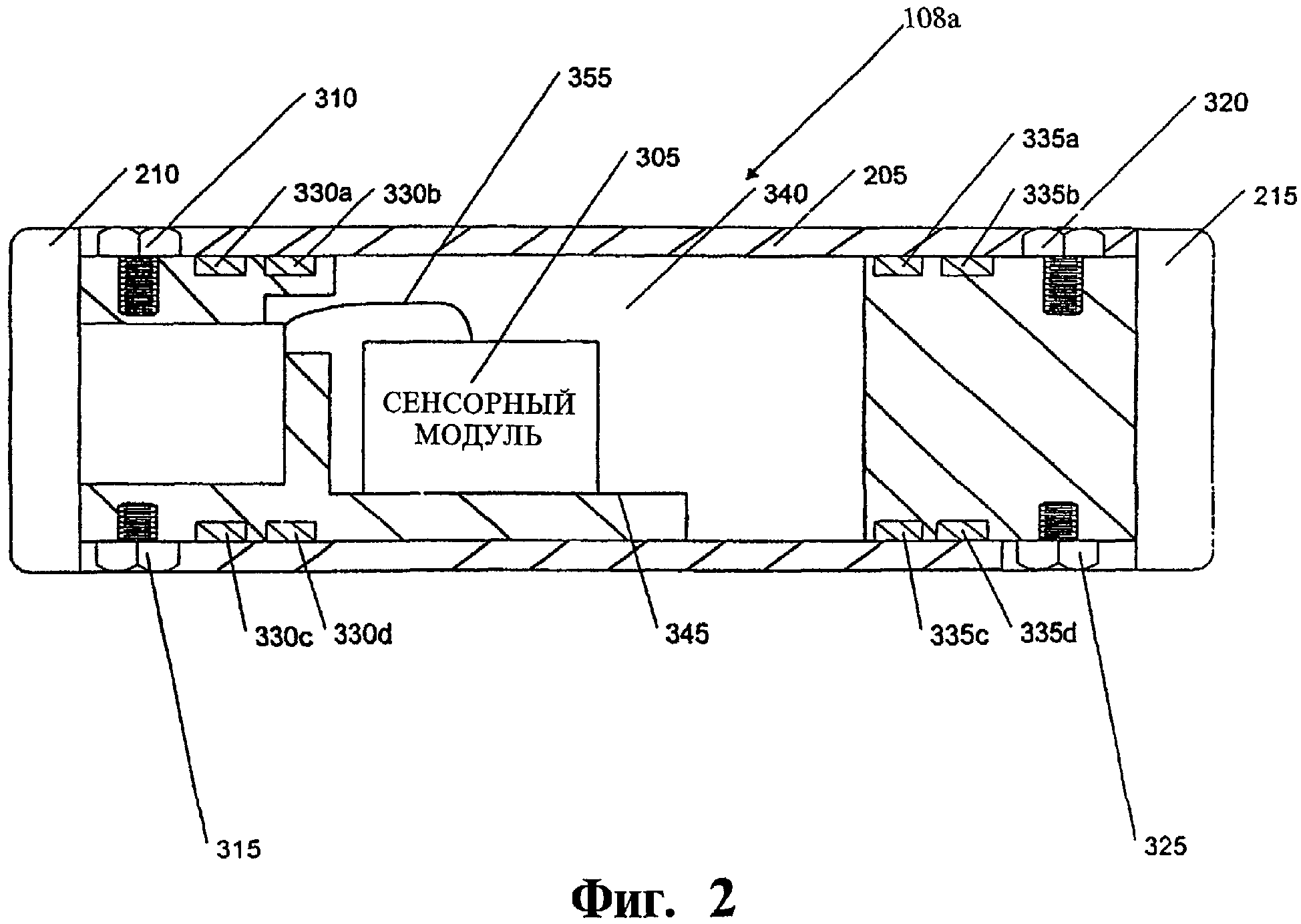
Фиг.2 представляет многоосный сенсор для использования в системе, показанной на фиг.1.
Фиг.3 представляет исполнение сенсорного модуля с фиг.2.
Фиг.4 представляет альтернативное исполнение сенсорного модуля с фиг.3.
Фиг.5 представляет обычный адаптивный фильтр.
Фиг.6 представляет адаптивный фильтр в соответствии с настоящим изобретением.
Фиг.7 представляет блок-схему предлагаемого способа сбора сейсмических данных.
Фиг.8 представляет блок-схему альтернативного варианта осуществления способа сбора сейсмических данных.
Осуществление изобретения
Фиг.1 представляет схематическое изображение системы сбора сейсмических данных в одном из возможных вариантов осуществления настоящего изобретения. Система 100 включает блок 102 записи и первичного контроля (центральный контроллер) для передачи команд на один или более удаленных блоков системы 100, а также для получения с них регистрируемых данных. Как показано, блок 102 записи и первичного контроля представляет собой передвижной блок, известный в среде специалистов в данной области техники как "грузовик" (truck) или "собачья будка" (dog house). Блок записи и первичного контроля может быть на выбор установлен на любом автомобиле или транспортном средстве или может быть установлен полустационарно в заранее определенном месте.
Блок 102 записи и первичного контроля (также именуемый в дальнейшем центральным контроллером 102) соединяется с одним или более приемными блоками - ресиверами 104. Блоки ресиверов могут быть установлены вместе с центральным контроллером 102 или ресиверы 104 могут быть установлены в поле, например, под открытым небом. Ресиверы 104 соединяются через двусторонние линии связи с множеством блоков 10а-10b сбора данных (DAU - data acquisition unit). Блоки 106 (106a-106b) сбора данных включают схему для получения сигнала с измерительной сети 108 сейсмических сенсоров (воспринимающих элементов) 108а. Желательно, чтобы каждый сейсмоприемник имел цифровой выход, отражающий регистрируемую сейсмическую активность. В альтернативном исполнении выходной сигнал с сейсмоприемников является аналоговым, и аналого-цифровое преобразование сигнала осуществляется в блоке DAU.
Далее, система 100 включает сейсмический излучатель (источник сейсмических сигналов) 110, такой как группа из одного или более грузовиков с вибраторами, взрывчатое вещество (например, динамит), пневматические пушки или тому подобное. Излучатель 110 и центральный контроллер 102 соединены через двустороннюю линию связи 122. Линия связи 122 может быть как аналоговой, так и цифровой. Желательно, чтобы передаваемые данные включали контрольные установки, пусковые команды, информацию о местоположении (относительном и/или глобальном), информацию о работоспособности излучателей, марку излучателей и любую другую информацию, полезную для управления разведкой.
В процессе сейсмической съемки излучатель 110 передает сейсмическую энергию на поверхность 114 земли, индуцируя тем самым акустическую волну 116, распространяющуюся в основном вниз. Акустическая волна 116 частично отражается от сейсмических неоднородностей, таких как структурная граница 120, что приводит к появлению отраженной волны 118, распространяющейся в основном в обратную сторону по направлению к поверхности 114.
Отраженная волна 118 регистрируется измерительной сетью сейсмоприемников 108 через отдельные сенсоры 108а. Система может использовать любое число воспринимающих акустическую энергию сенсоров, таких как геофоны, микрофоны, детектор на базе акселерометра, гидрофон при работе на заболоченных территориях и т.д. В соответствии с выбором измерительная сеть может состоять из единственного элемента или включать много элементов. Детекторы 108а могут иметь аналоговый или цифровой выход, может применяться и комбинация детекторов в измерительной сети 108, например комбинация типов детекторов и/или типов выходных сигналов.
В предпочтительном исполнении детекторы 108а являются многоосными детекторами, использующими систему электромеханических микроакселерометров (MEMS). Детекторы MEMS детально обсуждаются в патентной заявке US 09/936634, поданной 12 сентября 2001 г., и соответствующей заявке PCT/USOO/07310, поданной 17 марта 2000 г., и включенных в данное описание в качестве ссылки.
Выходные сигналы измерительной сети 108 могут представлять собой как одиночные сигналы от индивидуальных детекторов 108а, так и сигналы от всех детекторов. В одном из исполнений сигналы предварительно обрабатываются с использованием процессора (отдельно не показан), находящегося в каждом блоке сбора данных 10а-10b. Данные затем передаются на ресивер 104. Для простоты ресивер 104 изображен в виде единственного ресивера. Специалисты в данной области техники без труда поймут, что на практике для получения данных с измерительной сети 108 в системе может быть установлено любое число ресиверов. Сигналы могут обрабатываться как в соответствии с настоящим исполнением, так и в любом другом подходящем месте (узле) системы 100, например в ресивере 104 или центральном контроллере 102, используя адаптивный фильтр, предложенный в настоящем изобретении.
В данном исполнении соединения 112 между центральным контроллером 102 и ресивером 104, соединения 124 между ресивером 104 и блоками DAU 106, между каждым блоком DAU и измерительной сетью 108, а также соединения 122 между центральным контроллером 102 и излучателями 110 представляют собой электропроводящие провода 112а, 112b, 122a, 122b, 124a, 124b. Эти провода обозначаются коллективно как соединения 112/124, а в случае необходимости отдельные соединения будут обсуждаться отдельно с использованием соответствующего ссылочного номера. Провода, включающие соединения 112/124, выбираются для адекватной передачи электропитания и данных в соответствии с конкретными требованиями. При отсутствии специальных требований соединения 112/124 могут представлять собой любые провода, пригодные для передачи электропитания и данных. Нет никакой необходимости в том, чтобы на полном пути сигнала одно соединение, например соединение 112а, было бы того же типа, как любое другое, например 112b. Отдельные соединения могут представлять собой любые комбинации проводов, радиочастот, оптического волокна или электромагнитных устройств. Для блоков с автономными источниками питания, например ресиверов с электрическими батареями или излучателей 110 с автономными генераторами, соединения 112/124 могут также включать радиосвязь. В этих альтернативных исполнениях трансиверы (комбинации приемника/передатчика) устанавливаются в блоке, с которым они связаны. Для иллюстрации этого положения соединения 112/124 между центральным контроллером 102 и ресивером 104 показаны пунктиром.
Сейсмоприемник 108а, в соответствии с представленным на фиг.2 вариантом осуществления, включает корпус 205, закрытый первой торцовой крышкой 210 и второй торцовой крышкой 215, а также сенсорный модуль 305. Корпус 205 закрывается торцовыми крышками 210 и 215, которые крепятся винтами 310, 315, 320 и 325.
Уплотнения 330а-d уплотняют соединение корпуса 205 с первой торцовой крышкой 210, а уплотнения 335a-d уплотняют соединение корпуса 205 со второй торцовой крышкой 215. Уплотнения 330а-d и 335a-d могут представлять собой эластомерные кольца, способные сжиматься до достижения необходимого уплотнения.
Желательно, чтобы корпус 205 содержал полость 340 и плоскую поверхность 345. В одном из исполнений корпус 205 представляет собой металлическую трубу, изготовленную из высокопрочного материала для того, чтобы выдерживать нежелательное, но возможное давление.
Сенсорный модуль 305 устанавливается на плоскую поверхность 345 в полости 340 корпуса 205 и соединяется с первой торцовой крышкой 210 с помощью соединения 355, применяющегося для печатных плат.
В представленном на фиг.3. предпочтительном варианте исполнения сенсорный модуль 305 включает сенсорные контейнеры 405а-с и опору 410. Каждый сенсорный контейнер 405а-с имеет свою ось чувствительности 415, 420 и 425. Каждая ось чувствительности 415, 420 и 425 примерно параллельна осям х, у и z соответственно.
В представленном на фиг.4. предпочтительном варианте исполнения сенсорный модуль 305 включает сенсорные контейнеры 405, опору 410 и монолитный корпус (кронштейн) 1902. Сенсорные контейнеры 405 установлены в монолитном корпусе 1902. Сенсорный модуль 305 включает первый сенсорный контейнер 405а, второй сенсорный контейнер 405b и третий сенсорный контейнер 405с. Первый сенсорный контейнер 405а имеет ось чувствительности 415, примерно параллельную оси х, и установлен в монолитном корпусе 1902 для удерживания оси чувствительности 415 параллельно оси х. Второй сенсорный контейнер 405b имеет ось чувствительности 420, примерно параллельную оси у, и установлен в монолитном корпусе 1902 для удерживания оси чувствительности 420 параллельно оси у. Третий сенсорный контейнер 405с имеет ось чувствительности 425, примерно параллельную оси z, и установлен в монолитном корпусе 1902 для выдерживания оси чувствительности 425 параллельно оси z.
Устройство в соответствии с настоящим изобретением содержит адаптивный фильтр для удаления нежелательных шумов, подобных "поверхностным волнам", перед (компьютерной) обработкой сигнала. Фиг.5 представляет обычный известный адаптивный фильтр. Аналогичные фильтры используются для удаления из сейсмических сигналов неоднородно распределенного шума, такого как шум работающего механизма. Пример применения такого фильтра описан в патенте США №4890264 на имя Крюс и др. Обычные фильтры применялись и для удаления поверхностных волн. Пример применения обычного фильтра можно найти в патенте США №4556962 на имя Уидроу. Конструкция Уидроу использует сигнал на входе фильтра n'(k), либо получаемый с отдельного геофона, используемого для записи поверхностных волн, либо представляющий собой сигнал напрямую с акустического излучателя. Запись n'(k) обозначает зашумленный входной сигнал, x(k) - общее обозначение сигнала на входе адаптивного фильтра, а у(k) - сигнала на выходе. Вторым входным сигналом системы является рабочий сигнал d(k), который представляет собой смесь шума n(k) с акустическим сигналом s(k), зарегистрированным обычным акустическим сенсором. Входной сигнал d(k) и выходной сигнал с адаптивного фильтра у(k) затем суммируются для определения погрешности e(k). Погрешность e(k) в режиме обратной связи передается на адаптивный фильтр для корректировки выходного сигнала y(k) и успешной обработки данных. В такой типичной системе поверхностные волны подавляются за счет суммирования шума со средним сигналом сети геофонов. Во всех описанных случаях имеются в виду одноосные геофоны.
Фиг.6 представляет адаптивный фильтр 500 в соответствии с настоящим изобретением. Адаптивный фильтр принимает сигнал с многоосного сейсмоприемника, передающего на фильтр вертикальную и горизонтальную (или радиальную) компоненты сигнала. Поверхностные волны демонстрируют движение частиц твердого тела по эллиптическим траекториям в сторону, противоположную направлению движения волны, что приводит к появлению вертикальной и горизонтальной компонент сигнала трехосного сейсмического приемника, как описано выше и показано на фиг.2-4. В дальнейшем поляризационная природа поверхностных волн позволяет отличить поверхностные волны от других сигналов и/или шумов, в которых наблюдается корреляция между горизонтальной и вертикальной компонентами.
Проблемой является низкая скорость поверхностных волн в сочетании с его высокой дисперсией. Эти факторы, действующие совместно, делают подавление поверхностных волн при обработке полученного сигнала трудным делом. Адаптивная фильтрация в соответствии с настоящим изобретением использует корреляцию между компонентами записываемого сигнала для идентификации и подавления шума, что достигается применением нестационарных фильтров, обрабатывающих сигнал с единственного приемника.
Когда поверхностные волны имеют значительную амплитуду и создают помеху для чтения сейсмических данных, они ясно различимы на коротких по времени записях как высокоамплитудный, низкочастотный, дисперсный шумовой фон. Однако существуют и другие типы волн, такие как отраженные сдвиговые S-волны и волны Лява, времена вступления которых могут почти совпадать с вступлением поверхностных волн и которые могут быть ошибочно приняты за поверхностные волны. Конструкция фильтра, предлагаемого в настоящем изобретении, выделяет поверхностные волны по времени и по частоте перед фильтрацией, так что фильтрации подвергаются только сейсмические данные, зашумленные поверхностными волнами.
Фиг.6 показывает вертикальную компоненту полученных данных как полезный сигнал плюс шум s(k)+n(k), что составляет входной сигнал системы d(k). Радиальная волна также регистрируется, и зашумленный сигнал n'(k) подается на вход адаптивного фильтра системы. В соответствии с настоящим изобретением выходной сигнал фильтра в дальнейшем подвергается очистке с помощью создания "окна", использующего временные параметры для выделения определенной части радиальных данных. Вспомогательный фильтр полосы пропускания частот может быть также использован для обуживания полосы пропускания частот сигнала. Таким образом инвертированный выходной сигнал у(k) становится более точным перед суммированием с d(k). Это снижает выходную погрешность системы e(k), которая затем возвращается на адаптивный фильтр в режиме обратной связи.
Выделение поверхностных волн осуществляется путем демонстрации на дисплее графиков разности между мгновенными значениями фаз вертикальной и горизонтальной компонент сигнала от одного и того же трехосного сейсмоприемника. Результирующая разница дает возможность легко идентифицировать поляризованный шум.
Система 100, описанная выше и показанная на фиг.1-6, может использоваться в предпочтительном варианте способа в соответствии с настоящим изобретением. Акустический излучатель применяется для генерации в земле акустического (звукового) сигнала. Акустическая энергия расходуется также и на генерацию поверхностных волн, которые достигают многоосных сенсоров примерно в то же самое время, в какое приходит и полезный сигнал, отраженный от глубинного объекта, являющегося целью поиска. Многоосный детектор преобразует полученный акустический сигнал в вертикальную и горизонтальную компоненты выходного сигнала. Вертикальная и горизонтальная компоненты с многоосного детектора 108а передаются на процессор, расположенный, например, в блоке сбора данных. Блок сбора данных содержит в запоминающем устройстве инструкции для осуществления алгоритма фильтрации, применяемого к вертикальной и горизонтальной компонентам выходного сигнала. Алгоритм (процесс) фильтрации осуществляется адаптивным фильтром, под который подбираются входные коэффициенты, адаптируемые к изменяющимся входным условиям. Начальные коэффициенты фильтрации могут сохраняться в запоминающем устройстве для использования процессором, осуществляющим адаптивную фильтрацию. Запоминающее устройство и процессор могут не быть расположены вместе. В одном из исполнений процессор и запоминающее устройство размещены в центральном контроллере. В противоположность этому коэффициенты могут храниться в запоминающем устройстве DAU или в любом другом удобном месте. Процессор также может и не располагаться в центральном контроллере. Процессор может располагаться в любом удобном месте, например в блоке DAU. Способ обработки данных описан ниже и представлен на фиг.7 и 8.
На фиг.7 представлена блок-схема процесса обработки данных, применяемого в предпочтительном варианте осуществления настоящего изобретения - способе 600 адаптивной фильтрации для подавления поверхностных волн в выбранных сигналах. В предпочтительном исполнении инструкции данного способа хранятся в памяти системы, описанной выше и представленной на фиг.1. Эти инструкции выполняются процессором системы для удаления поверхностных волн из вертикальной компоненты сигнала, включающей отраженную сейсмическую волну, т.е. полезный сигнал, и поверхностные волны.
Как описано выше, параметры окна определяются 602 с использованием сигналов, полученных с горизонтального и вертикального выходов многоосного сейсмического сенсора. Параметры окна выбираются исходя из отличительных характеристик поверхностных волн. Например, такой характеристикой является разница фаз вертикальной и горизонтальной компонент сигнала приблизительно в 90°.
Горизонтальная компонента выходного сигнала с сенсора передается на адаптивный фильтр (шаг 604), а вспомогательный фильтр полосы пропускания частот применяется на шаге 606 для выбора конкретной ширины полосы частот. Горизонтальная компонента сигнала затем сравнивается на шаге 608 с параметрами окна и те частоты, которые соответствуют критериям параметров окна, суммируются на шаге 610 с вертикальной компонентой сигнала, включающей поверхностные волны. Результирующий выходной сигнал итерационно передается обратно на адаптивный фильтр для дальнейшей фильтрации, так что вертикальная компонента сигнала в финальной форме оказывается в значительной степени свободна от поверхностных волн.
Обратимся теперь к фиг.8, где показан альтернативный вариант способа адаптивной фильтрации 700 в соответствии с настоящим изобретением. Этот способ в значительной степени аналогичен способу, показанному на фиг.7, однако вертикальная и горизонтальная компоненты выходного сигнала сенсора поменяны местами. Этот способ позволяет фильтровать горизонтальную компоненту сигнала, если это необходимо. Параметры окна определяются на шаге 702 с использованием сигналов, полученных с вертикального и горизонтального выходов многоосного сейсмического сенсора. Параметры окна выбираются исходя из отличительных характеристик поверхностных волн. Например, такой характеристикой является разница фаз вертикальной и горизонтальной компонент сигнала приблизительно в 90° .
Вертикальная компонента выходного сигнала сенсора передается на адаптивный фильтр (шаг 704), а вспомогательный фильтр полосы пропускания частот применяется на шаге 706 для выбора конкретной ширины полосы частот. Вертикальная компонента сигнала затем сравнивается на шаге 708 с параметрами окна и те частоты, которые соответствуют критериям параметров окна, суммируются на шаге 710 с горизонтальной компонентой сигнала, включающей поверхностные волны. Результирующий выходной сигнал итерационно передается обратно на адаптивный фильтр для дальнейшей фильтрации, так что горизонтальная компонента сигнала в финальной форме оказывается в значительной степени свободна от поверхностных волн.
Для удобства иллюстрирования и объяснений представленное выше описание относится конкретному исполнению настоящего изобретения. Однако любому специалисту, знакомому с данной областью техники, будет очевидно, что в рамках настоящего изобретения возможно множество различных модификаций и изменений. Следующие пункты формулы изобретения должны интерпретироваться как имеющие цель охватить все такие модификации и изменения.
Реферат
В настоящем изобретении разработан способ адаптивной фильтрации для эффективного подавления поверхностных волн, наблюдаемых при сборе данных в ходе сейсморазведки. Для осуществления способа предлагается устройство для фильтрации сейсмических сигналов для системы сбора сейсмических данных, включающее многоосный детектор и средство адаптивной фильтрации. 2 н. и 24 з.п. ф-лы, 8 ил.

Комментарии