Самофиксирующаяся рукоятка управления медицинского устройства с механизмом сцепления с кулачковым приводом - RU2608440C2
Код документа: RU2608440C2
Чертежи







Описание
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к рукоятке управления для медицинских устройств, в частности к рукоятке управления с множеством механизмов для управления множеством вытягивающих проволок.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Электродные катетеры широко применяются в медицинской практике в течение многих лет. Они используются для стимуляции и картирования электрической активности сердца, а также для абляции участков с нарушенной электрической активностью. Фибрилляция предсердий является распространенным хроническим нарушением ритма сердца и основной причиной инсульта. Это заболевание характеризуется наличием возвратных импульсов, распространяющихся в патологической предсердной ткани. Существуют различные подходы к прерыванию этих импульсов, в том числе атриотомия, выполняемая хирургическим путем или путем катетеризации. Перед тем как приступить к лечению заболевания, прежде всего необходимо выявить участок, в котором проходят импульсы. Известны различные способы выявления, в том числе с применением катетеров с узлом картирования, выполненных с возможностью измерять активность в легочной вене, венечном синусе или иной трубчатой структуре по ее внутренней окружности. Один из таких узлов картирования имеет трубчатую конструкцию, содержащую по существу цилиндрическую основную область, расположенную по существу перпендикулярно и дистально относительно корпуса катетера и имеющую наружную окружность, и по существу прямую дистальную область, расположенную дистально относительно основной области. Трубчатая конструкция содержит непроводящее покрытие, покрывающее по меньшей мере основную область узла картирования. В по меньшей мере основной области узла картирования находится опорный элемент, выполненный из материала с эффектом памяти формы. По существу цилиндрическая основная область узла картирования содержит множество пар электродов, каждая из которых состоит из двух кольцевых электродов.
На практике электродный катетер вводят в интродьюсер, установленный в основной вене или артерии, например, в бедренной артерии, и направляют в камеру сердца. В камере катетер выходит за пределы дистального конца интродьюсера, открывая узел картирования. Маневрируя катетером, в том числе используя отклонения дистальной части катетера, узел картирования устанавливают в трубчатой области камеры сердца. Возможность контролировать точное положение и направление катетера, а также конструкция узла картирования играют большую роль, во многом определяя общую эффективность применения катетера.
Управляемые катетеры по существу хорошо известны специалистам. Например, в патенте США № Re 34502 описан катетер с рукояткой управления, имеющей корпус с поршневой камерой на дистальном конце. В поршневой камере установлен поршень, который может перемещаться в продольном направлении. К поршню прикреплен проксимальный конец удлиненного корпуса катетера. К корпусу прикреплена вытягивающая проволока, проходящая через поршень, корпус катетера и в секцию наконечника на дистальном конце корпуса катетера. Дистальный конец вытягивающей проволоки закреплен в секции наконечника катетера. В такой конструкции продольное перемещение поршня относительно корпуса приводит к отклонению секции наконечника катетера.
Описанный в патенте США № RE 34502 промышленный образец по существу ограничен катетером с одной вытягивающей проволокой. Если требуется двунаправленное отклонение области наконечника катетера, необходимо более одной вытягивающей проволоки. Более того, если требуется большая управляемость катетером, например, возможность сжатия узла картирования, необходима дополнительная вытягивающая проволока. Более того, желательно, чтобы механизмы привода вытягивающих проволок были самофиксирующимися, так чтобы эти механизмы могли обеспечивать отклонение катетера и/или сжатие узла картирования без необходимости в постоянном контроле со стороны пользователя. Таким образом, существует необходимость в создании рукоятки управления, способной обеспечить перемещение множества вытягивающих проволок, которая может функционировать в режиме, не требующем постоянного управления со стороны пользователя.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к рукоятке управления медицинского устройства. По мере того как медицинские устройства, в особенности электрофизиологические катетеры, становятся все более сложными и включают все большее число управляемых компонентов, возникает необходимость в рукоятке управления, которая может обеспечивать независимое управление множеством вытягивающих проволок. В рукоятке управления, составляющей предмет настоящего изобретения, используется первый приводной узел для активации по меньшей мере одного вытягивающего элемента для управления элементом конструкции медицинского устройства и второй приводной узел для активации другого вытягивающего элемента для управления другим элементом конструкции медицинского устройства, при этом первый и второй приводные узлы задают общую ось вращения, не будучи при этом соединены друг с другом с возможностью вращения.
В одном варианте осуществления первый приводной узел имеет вал, первый исполнительный элемент, роликовый рычаг и механизм сцепления, каждый из которых установлен на валу и соединен с ним с возможностью вращения, при этом роликовый рычаг выполнен с возможностью воздействия по меньшей мере на один приводной элемент. Установленный на конце или близко к концу вала первый исполнительный элемент находится в плоскости, которая по существу перпендикулярна валу, и может быть выведен из плоскости и повернут пользователем. Механизм сцепления включает в себя фрикционный диск, который также установлен на валу и придает первому исполнительному элементу свойство самофиксирования путем создания сопротивления вращению вокруг вала через фрикционный контакт с создающей трение поверхностью в рукоятке управления. Для целей настоящего изобретения вал выполнен с возможностью поступательного перемещения, которое выводит фрикционный диск из контакта с создающей трение поверхностью, когда исполнительный элемент выводят из плоскости для расцепления механизма сцепления и перемещения с возможностью вращения, которое приводит к активации вытяжного элемента при повороте исполнительного элемента. По меньшей один приводной элемент проходит от рукоятки управления до первого элемента конструкции медицинского устройства и дает пользователю возможность регулировать первый элемент конструкции, например, контролировать отклонение промежуточной секции, управляя первым исполнительным элементом.
В более подробном варианте осуществления первый исполнительный элемент представляет собой удлиненную ручку, имеющую кулачок с двумя кулачковыми поверхностями, при этом одна кулачковая поверхность выполнена с возможностью расцепления механизма сцепления путем поступательного перемещения вала в одном направлении для выведения фрикционного диска из контакта с создающей трение поверхностью, тем самым позволяя валу и роликовому рычагу вращаться для активации вытяжного элемента, а другая кулачковая поверхность выполнена с возможностью зацепления механизма сцепления путем поступательного перемещения вала в противоположном направлении для восстановления контакта фрикционного диска с создающей трение поверхностью, тем самым создавая сопротивление повороту вала. На валу установлена компрессионная подпружиненная шайба для предварительного нагружения узла, так что механизм сцепления остается в зацепленном состоянии и придает первому исполнительному элементу свойство самофиксирования до момента активного расцепления пользователем.
В другом варианте осуществления рукоятка управления включает в себя второй вытяжной элемент и второй приводной узел, который имеет второй вал, второй исполнительный элемент, установленный на втором валу и соединенный с ним с возможностью вращения, и элемент поступательного перемещения, приводимый в движение поворотом второго вала, при этом проксимальный конец второго вытяжного элемента зафиксирован в элементе поступательного перемещения для приведения его в движение при повороте второго исполнительного элемента пользователем. В более подробном варианте осуществления второй вал имеет элемент цилиндрической прямозубой передачи, который при повороте воздействует на элемент зубчатой рейки на элементе поступательного перемещения для перемещения элемента поступательного перемещения. Ось вращения второго вала выровнена в аксиальном направлении с осью вращения первого приводного узла для большей компактности устройства, однако два вала вращательно совершенно независимы друг от друга. Второй вытяжной элемент проходит от рукоятки управления до второго элемента конструкции медицинского устройства и позволяет пользователю регулировать второй элемент конструкции, например, управлять дистальным узлом, имеющим спиральный участок, с помощью второго исполнительного элемента. Второй исполнительный элемент также является самофиксирующимся благодаря установленной на втором валу компрессионной подпружиненной шайбе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие особенности и преимущества настоящего изобретения станут более понятными на примере следующего подробного описания в сочетании с сопроводительными фигурами. Необходимо понимать, что для лучшего обзора остальных конструкций и элементов на некоторых фигурах не показаны некоторые конструкции и элементы.
На ФИГ. 1 представлен вид сверху одного варианта осуществления катетера, составляющего предмет настоящего изобретения.
На ФИГ. 2A представлен вид сбоку варианта осуществления соединения между корпусом катетера и промежуточной секцией в поперечном разрезе вдоль первого диаметра.
На ФИГ. 2B представлен вид сбоку варианта осуществления соединения, показанного на ФИГ. 2А, в поперечном разрезе вдоль второго диаметра, по существу перпендикулярного первому диаметру.
На ФИГ. 3 представлен вид сзади в поперечном разрезе промежуточной секции, изображенной на ФИГ. 2A и 2B.
На ФИГ. 4 представлен вид сбоку варианта осуществления дистального узла.
На ФИГ. 5 представлен вид сзади в поперечном разрезе по существу прямой проксимальной части дистального узла, изображенного на ФИГ. 4, по линии 5-5.
На ФИГ. 6 представлен вид в перспективе рукоятки управления, изображенной на ФИГ. 1, на котором показаны первый приводной узел и второй приводной узел, выровненные в аксиальном направлении, но вращательно независимые друг от друга.
На ФИГ. 7A представлен вид сзади в поперечном разрезе рукоятки управления, изображенной на ФИГ. 1, по линии 7-7, на котором показан присоединенный механизм сцепления.
На ФИГ. 7B представлен вид сзади в поперечном разрезе рукоятки управления, изображенной на ФИГ. 7A, на котором показан расцепленный механизм сцепления.
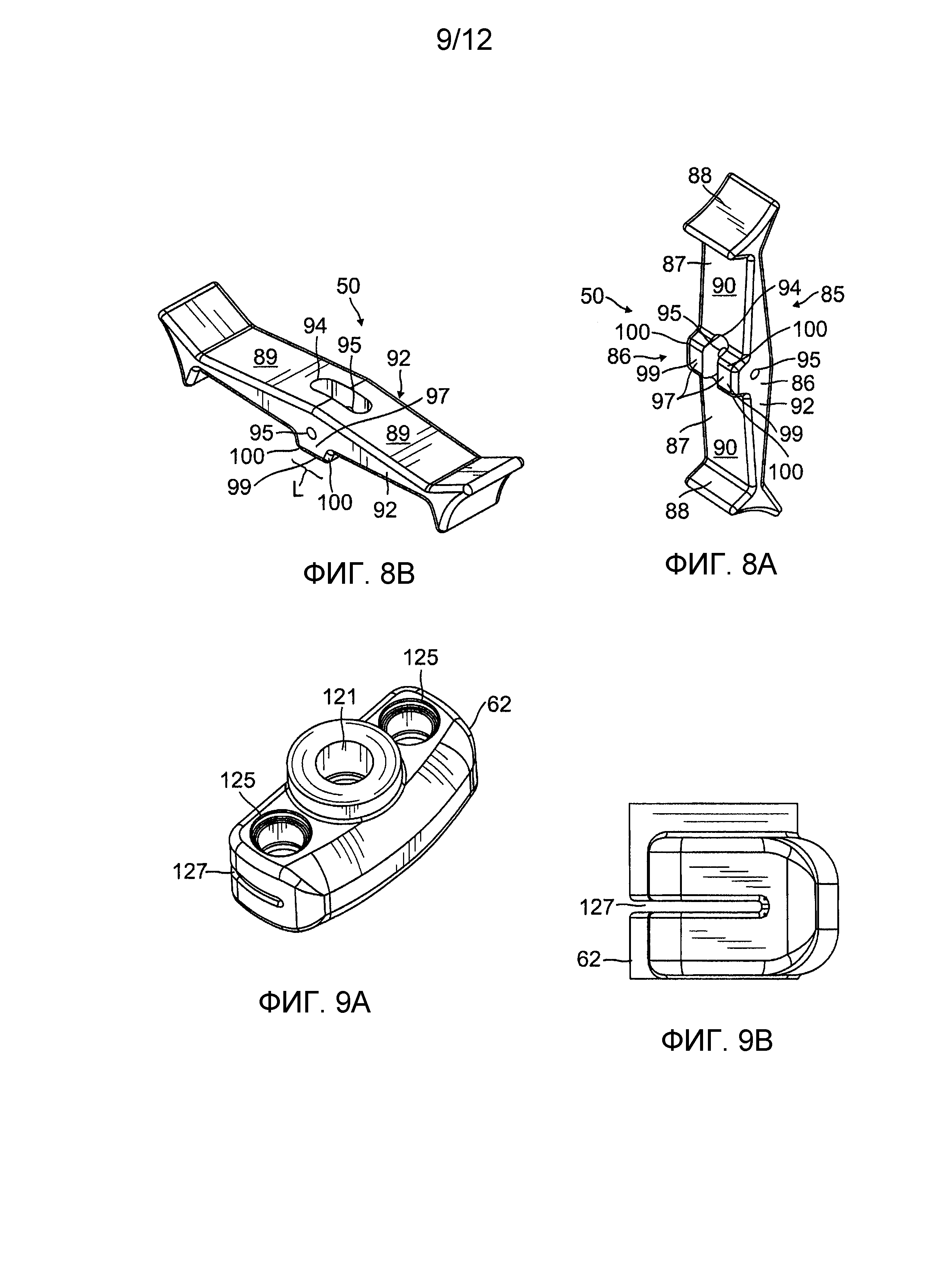
На ФИГ. 8A представлен вид сбоку в перспективе варианта осуществления первого исполнительного элемента, например, ручки отклонения.
На ФИГ. 8B представлен другой вид сбоку в перспективе ручки отклонения, изображенной на ФИГ. 8A.
На ФИГ. 9A представлен вид сверху в перспективе варианта осуществления роликового рычага.
На ФИГ. 9B представлен вид сзади в перспективе роликового рычага, изображенного на ФИГ. 9A.
На ФИГ. 10 представлен вид сбоку в перспективе варианта осуществления вала кулачкового привода.
На ФИГ. 11A представлен вид сбоку в перспективе варианта осуществления корпуса механизма сцепления.
На ФИГ. 11B представлен другой вид сбоку в перспективе корпуса механизма сцепления, изображенного на ФИГ. 11A.
На ФИГ. 12 представлен вид сбоку в перспективе варианта осуществления компрессионной подпружиненной шайбы.
На ФИГ. 13 представлен вид сбоку в перспективе варианта осуществления аксиального подшипника скольжения.
На ФИГ. 14 представлен вид сбоку в перспективе варианта осуществления радиального подшипника.
На ФИГ. 15 представлен вид сбоку в перспективе варианта осуществления ролика.
На ФИГ. 16 представлен вид сбоку в перспективе варианта осуществления втулочного подшипника.
На ФИГ. 17A-17C схематично представлен вариант осуществления рукоятки управления в нейтральном положении, в положении с отклонением вправо и в положении с отклонением влево.
На ФИГ. 18A представлен вид сбоку в перспективе варианта осуществления радиального подшипника с внешней поверхностью, в которой выполнен паз для вращения.
На ФИГ. 18B представлен вид сбоку в перспективе внутренней поверхности радиального подшипника, изображенного на ФИГ. 18A.
На ФИГ. 19 представлен вид сбоку в перспективе альтернативного варианта осуществления частично шлицевого вала.
На ФИГ. 20 представлен вид сбоку в перспективе варианта осуществления второго исполнительного элемента, например, поворотной ручки управления сжимающей проволокой.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
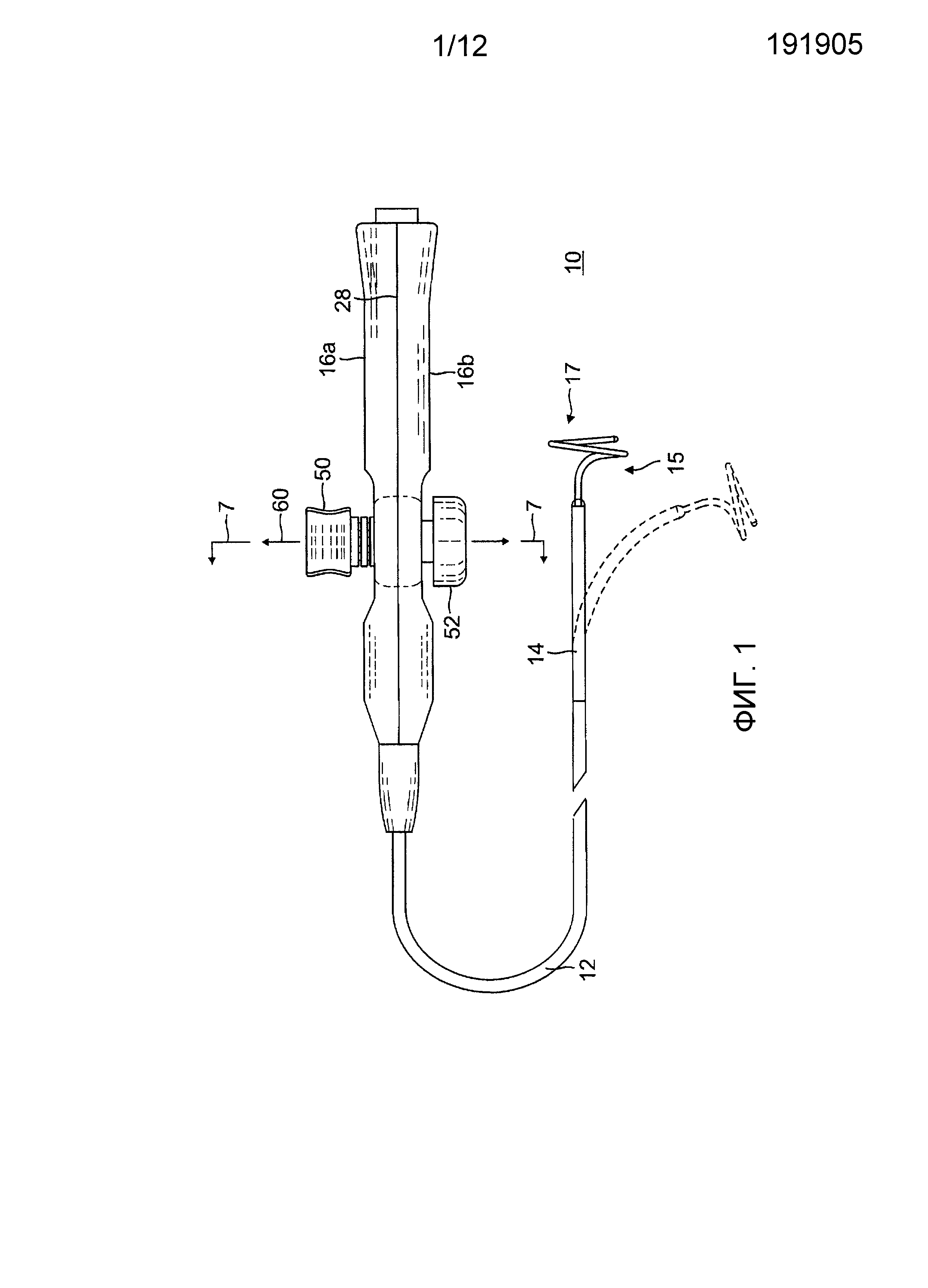
Настоящее изобретение относится к рукоятке управления 10 для использования с медицинским устройством, имеющим по меньшей мере два прочных вытягивающих элемента, например, две вытягивающие проволоки или т.п., для выполнения по меньшей мере двух независимых перемещений или операций с компонентами медицинского устройства. Рукоятку управления можно использовать с широким спектром медицинских устройств, например, электрофизиологическим (ЭФ) катетером 10, выполненным с возможностью картирования и/или абляции ткани, включая ткани сердца, вариант осуществления которого изображен на ФИГ. 1. В целях настоящего изобретения первый исполнительный элемент используют для управления одним элементом конструкции медицинского устройства, а второй исполнительный элемент используют для управления другим элементом конструкции медицинского устройства.
Представленный на ФИГ. 1 катетер 10 содержит удлиненный корпус катетера 12, изгибаемую промежуточную секцию 14 на дистальном конце корпуса катетера 12 и секцию наконечника 15, включая дистальный узел 17, имеющий, например, спиралевидную форму, на дистальном конце промежуточной секции 14. В представленном на ФИГ. 1 и 6 варианте осуществления рукоятка управления 16 для использования с катетером имеет первый исполнительный элемент, например, ручку двунаправленного отклонения 50, которая выполнена с возможностью приведения в действие по меньшей мере одной вытягивающей проволоки или, возможно, пары вытягивающих проволок, проходящих от рукоятки управления 16 через корпус катетера 12 и промежуточную секцию 14 для одно - или двунаправленного изгиба промежуточной секции. В соответствии с характеристиками устройства настоящего изобретения рукоятка управления имеет второй исполнительный элемент, например, поворотную ручку 52, напротив первого исполнительного элемента 50 для приведения в действие еще одной (или третьей) вытягивающей проволоки для независимого управления или регулирования положения дистального узла 17, исходящего от промежуточной секции 14, например, для сжатия спиралевидной формы дистального узла. Каждый исполнительный элемент может работать отдельно и независимо без воздействия на другой исполнительный элемент или его вытягивающую(ие) проволоку(и).
Как представлено на ФИГ. 2A и 2B, корпус катетера 12 имеет один центральный или аксиальный просвет 18. Корпус катетера 12 является гибким, то есть поддающимся изгибу, но по существу несжимаемым по всей длине. Корпус катетера 12 может иметь любую соответствующую конструкцию и может быть изготовлен из любого соответствующего материала. В одном варианте осуществления корпус катетера 12 содержит внешнюю стенку 22, выполненную из полиуретана или пебакса. Наружная стенка 22 содержит встроенную плетеную сетку из нержавеющей стали или т.п. для повышения жесткости на скручивание корпуса катетера 12, так чтобы при вращении рукоятки управления 16 секция наконечника катетера 10 вращалась соответствующим образом.
Внешний диаметр корпуса катетера 12 не имеет значения, но предпочтительно не должен превышать приблизительно 2,67 мм (8 French). Аналогичным образом, толщина наружной стенки 22 не имеет особого значения. Внутренняя поверхность наружной стенки 22 может быть укреплена упрочняющей трубкой 20, которая может быть изготовлена из любого соответствующего материала, предпочтительно полиимида. Упрочняющая трубка 20 зафиксирована относительно наружной стенки 22 на проксимальном конце корпуса катетера 12. Между дистальными концами упрочняющей трубки 20 и наружной стенки 22 выполнено первое клеевое соединение 23 при помощи быстро сохнущего клея, например, Super Glue.RTM. После этого выполняют второе клеевое соединение 25 между проксимальными концами упрочняющей трубки 20 и наружной стенки 22 с использованием долго сохнущего, но более прочного клея, например, полиуретанового клея.
Упрочняющая трубка 20 и оплетенная наружная стенка 22 обеспечивают повышенную устойчивость к скручиванию, значительно сокращая толщину стенки катетера, что позволяет максимально увеличить диаметр одного просвета. Внешний диаметр упрочняющей трубки 20 имеет приблизительно такой же или немногим меньший внутренний диаметр наружной стенки 22. Для этих целей можно использовать полиимидную трубку, поскольку она может быть выполнена с очень тонкой стенкой и в то же время иметь очень хорошую жесткость. Это позволяет максимально увеличить диаметр центрального просвета 18 без ущерба для прочности и жесткости. Как правило, полиимидный материал не используют для изготовления упрочняющих трубок из-за склонности к перекручиванию во время изгиба. Однако было установлено, что в комбинации с наружной стенкой 22 из полиуретана, пебакса или подобного материала, в особенности оснащенного оплеткой из нержавеющей стали, подверженность полиимидной упрочняющей трубки 20 к перекручиванию при изгибе при условии использования катетера по назначению по существу исключается.
В одном варианте осуществления наружная стенка 22 имеет внешний диаметр приблизительно 2,34 мм (0,092 дюйма) и внутренний диаметр приблизительно 1,60 мм (0,063 дюйма), а полиимидная упрочняющая трубка 20 имеет внешний диаметр приблизительно 1,56 мм (0,0615 дюйма) и внутренний диаметр приблизительно 1,32 мм (0,052 дюйма).
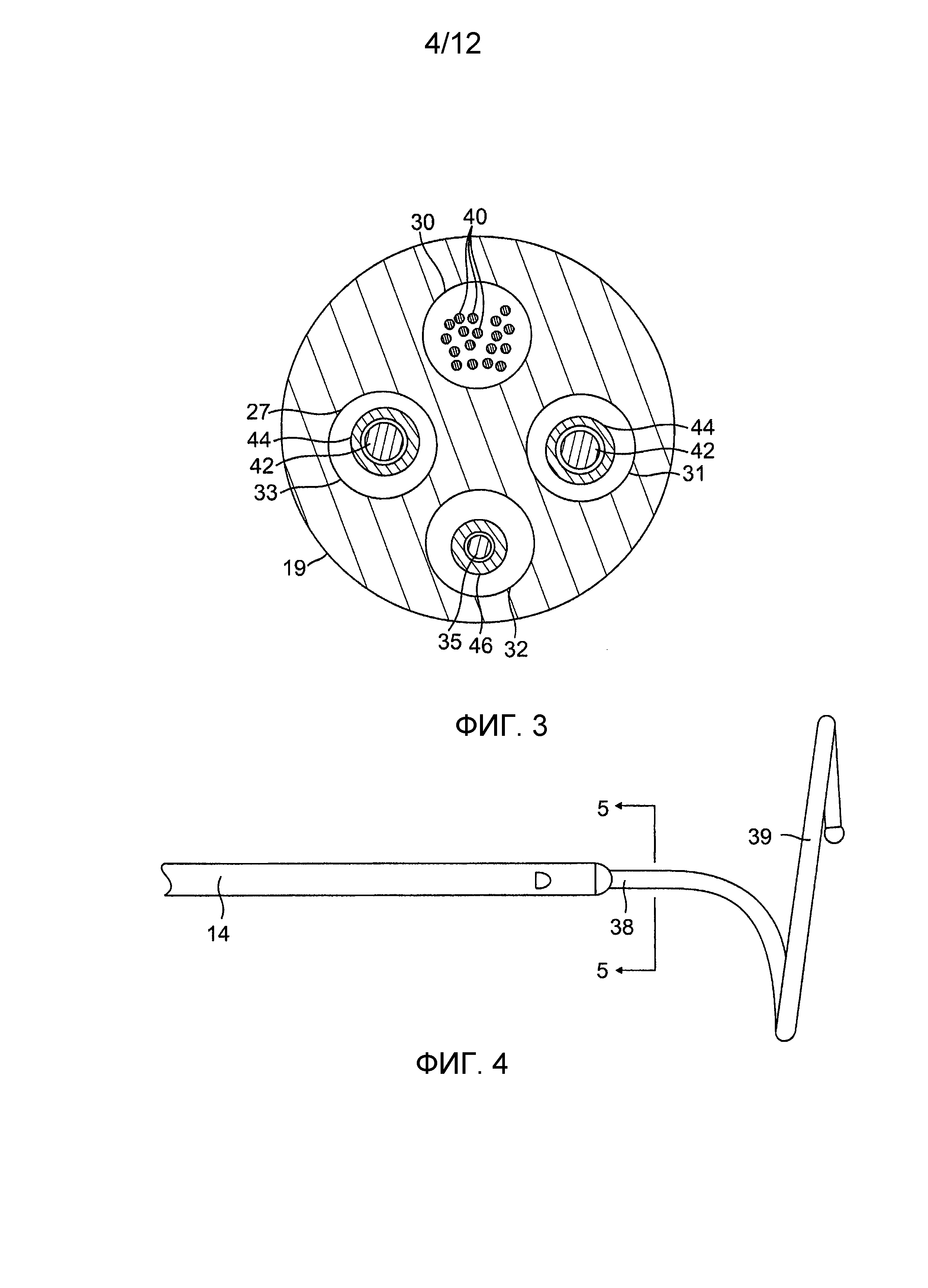
Как представлено на ФИГ. 2A, 2B и 3, промежуточная секция 14 содержит более короткий отрезок трубки 19 с множеством просветов, например, первым, вторым, третьим и четвертым просветами 30, 31, 32 и 33. Трубка 19 изготовлена из соответствующего нетоксичного материала, предпочтительно более гибкого, чем материал корпуса катетера 12. В качестве соответствующего материала для трубки 19 можно использовать плетеный полиуретан, то есть полиуретан с встроенной сеткой из нержавеющей стали или подобной конструкцией. Внешний диаметр промежуточной секции 14, как и внешний диаметр корпуса катетера 12, предпочтительно не превышает приблизительно 2,67 мм (8 French). Размер просветов не имеет значения. В одном варианте осуществления промежуточная секция имеет внешний диаметр приблизительно 2,34 мм (7 French (0,092 дюйма)), просветы по существу имеют приблизительно такой же размер, и их диаметр составляет приблизительно 0,55 мм (0,022 дюйма), или некоторые просветы могут иметь несколько больший диаметр - приблизительно 0,91 мм (0,036 дюйма).
На ФИГ. 2A и 2B представлен способ крепления корпуса катетера 12 к промежуточной секции 14. Проксимальный конец промежуточной секции 14 содержит внутреннее глухое отверстие 24 для размещения внешней поверхности полиимидного ребра жесткости 20. Промежуточная секция 14 и корпус катетера 12 скреплены клеем 29 или т.п.
Как представлено на ФИГ. 2A и 2B, через одиночный просвет 18 корпуса катетера 12 проходят различные компоненты, например, токопроводящие проводники и множество вытягивающих проволок, а также любые иные провода или кабели. Продольное перемещение вытягивающих проволок относительно корпуса катетера 12 позволяет пользователю контролировать различные части катетера, используя для этого рукоятку управления. Как указано выше, в одном варианте осуществления в конструкции есть первая и вторая отклоняющие вытягивающие проволоки 42 для отклонения промежуточной секции 14 и третья вытягивающая проволока 35 для управления и регулирования положения дистального узла 17 секции наконечника 15.
Однопросветный корпус катетера 12 может быть предпочтительнее корпуса с множеством просветов, так как один просвет 18 корпуса позволяет лучше контролировать положение наконечника при вращении катетера 10. Один просвет 18 позволяет свободно разместить все проходящие по нему компоненты в корпусе катетера. Если бы эти компоненты были заключены во множестве просветов, то в процессе вращения рукоятки 16 они смогли бы аккумулировать энергию, что может вызвать обратное вращение корпуса катетера 12, например, при отпускании рукоятки, изгибе по кривой или повороте на 180 градусов, при этом оба свойства являются нежелательными.
Как представлено на ФИГ. 3, одна отклоняющая вытягивающая проволока 42 проходит через центральный просвет 18 корпуса катетера 12 во второй просвет 31 промежуточной секции 14. Другая отклоняющая вытягивающая проволока 42 проходит через центральный просвет 18 в четвертый просвет 33 промежуточной секции 14. В этой связи просветы 31 и 33 должны быть смещены от оси и должны быть диаметрально противоположными друг другу для двунаправленного отклонения в плоскости. Дистальные концы отклоняющих вытягивающих проволок 42 закреплены на стенке трубки 19 у дистального конца промежуточной секции 14 с помощью Т-образных фиксаторов (на фигуре не показаны), как будет понятно специалистам в данной области. В промежуточной секции 14 каждая отклоняющая вытягивающая проволока 42 имеет пластиковую, например, тефлоновую (Teflon.RTM.), оболочку 81, которая предотвращает врезание отклоняющих вытягивающих проволок 42 в стенку трубки 19 промежуточной секции 14 при отклонении промежуточной секции 14.
Как представлено на ФИГ. 2B, от проксимального конца корпуса катетера 12 к проксимальному концу промежуточной секции 14 проходят компрессионные обмотки 44, окружающие отклоняющие вытягивающие проволоки 42. Компрессионные обмотки 44 изготовлены из любого соответствующего металла, например, из нержавеющей стали. Компрессионные обмотки 44 имеют плотную намотку, что обеспечивает гибкость, то есть способность к изгибу, но при этом хорошую сопротивляемость сжатию. Внутренний диаметр компрессионных обмоток 44 предпочтительно незначительно превышает диаметр вытягивающих проволок 42. Например, если диаметр вытягивающей проволоки 42 равен приблизительно 0,18 мм (0,007 дюйма), то внутренний диаметр компрессионной обмотки 44 предпочтительно составляет приблизительно 0,20 мм (0,008 дюйма). Тефлоновое (Teflon.RTM.) покрытие вытягивающей проволоки 42 позволяет им свободно скользить внутри компрессионных обмоток 44. Наружная поверхность компрессионных обмоток 44 покрыта гибкой непроводящей оболочкой 27, препятствующей контакту компрессионных обмоток 44 с другими элементами, такими как токопроводящие проводники и кабели и т.д. В одном варианте осуществления непроводящая оболочка выполнена из полиимидной трубки.
Проксимальные концы компрессионных обмоток 44 зафиксированы на проксимальном конце упрочняющей трубки 20 в корпусе катетера 12 с помощью клеевого соединения 51 (ФИГ. 2B), а дистальные концы зафиксированы рядом с проксимальным концом промежуточной секции 14 во втором просвете 31 и в четвертом просвете 33 с помощью клеевых соединений 49 (ФИГ. 2B).
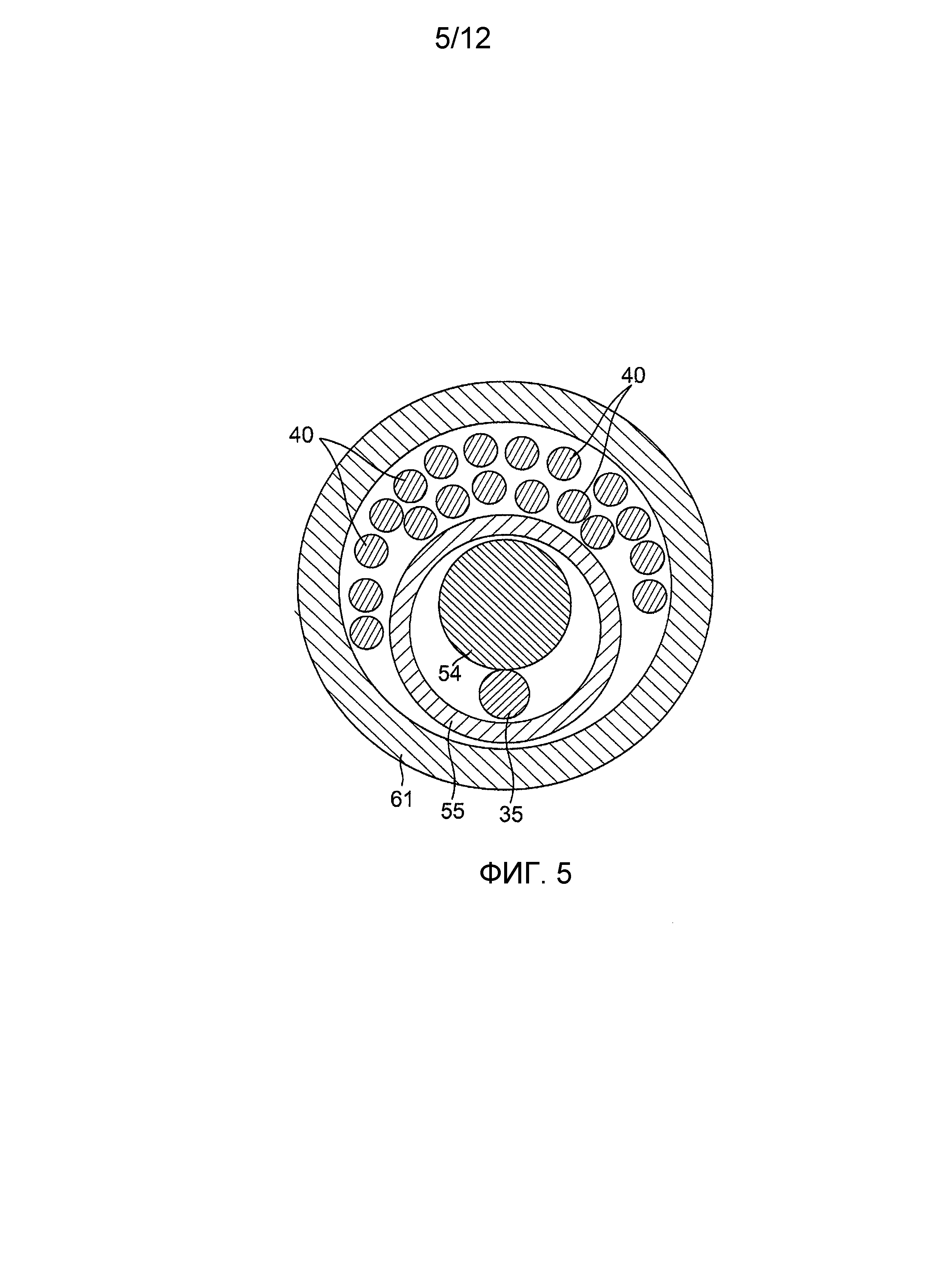
Как представлено на ФИГ. 4, на дистальном конце промежуточной секции 14 находится дистальный узел 17. Дистальный узел 17 содержит по существу прямую проксимальную область 38 и по существу кольцевую основную область 39. Проксимальная область 38 установлена на промежуточной секции 14, а в основной области 39 находится множество электродов для картирования и/или абляции. В представленном на ФИГ. 5 варианте осуществления дистальный узел 17 включает в себя трубку 61. Элемент с эффектом памяти формы 54 и токопроводящие проводники 40 для расположенных на дистальном узле электродов проходят через просвет в трубке 61 в промежуточную секцию 14 и в корпус катетера 12.
В описанном варианте осуществления третья или сжимающая вытягивающая проволока 35 предназначена для сжатия по существу кольцевой основной области 39, что позволяет изменять или уменьшать ее диаметр, например, во время картирования или абляции кольцевых или трубчатых структур сердца. Проксимальный конец сжимающей проволоки 35 зафиксирован в рукоятке управления 16, как описано ниже. Сжимающая проволока 35 проходит через центральный просвет 18 корпуса катетера 12 и через третий просвет 32 промежуточной секции 14 (ФИГ. 3) и поступает в дистальный узел 17 (ФИГ. 5).
Третья компрессионная обмотка 46 расположена в корпусе катетера 12 и стволе промежуточной секции 14 и охватывает сжимающую проволоку 35 (ФИГ. 2A). Третья компрессионная обмотка 46 проходит от проксимального конца корпуса катетера 12 до участка рядом с дистальным концом третьего просвета 32 промежуточной секции 14. Третья компрессионная обмотка 46 изготовлена из любого соответствующего металла, такого как нержавеющая сталь, и плотно намотана для обеспечения гибкости, то есть способности к изгибу, но при этом обладает прочностью на сжатие. Внутренний диаметр третьей компрессионной обмотки 46 предпочтительно незначительно превышает диаметр сжимающей проволоки 35. Наружная поверхность компрессионной обмотки 46 покрыта гибкой непроводящей оболочкой 68, например, изготовленной из полиимидной трубки. Третья компрессионная обмотка 46 предпочтительно сформирована из проволоки с квадратным или прямоугольным сечением, что делает ее менее сжимаемой в сравнении с компрессионной обмоткой, сформированной из проволоки с круглым сечением. В результате третья компрессионная обмотка 46 предохраняет корпус катетера 12 и, в частности, промежуточную секцию 14, от отклонения при сжатии дистального узла 17 с помощью сжимающей проволоки 35, так как она поглощает большую часть сжатия.
Проксимальный конец третьей компрессионной обмотки 46 зафиксирован на упрочняющей трубке 20 корпуса катетера 12 с помощью проксимального клеевого соединения 50 и на промежуточной секции 14 с помощью дистального клеевого соединения.
Необходимо понимать, что клеевые соединения на катетере 10 могут содержать полиуретановый клей или т.п. Для нанесения клея используют шприц или аналогичное приспособление. Клей наносят через отверстие, выполненное в стенке трубки. Такое отверстие может быть выполнено, например, при помощи иглы или т.п., используемой для прокалывания стенок трубки, при этом иглу предварительно нагревают до температуры, достаточной для формирования постоянного отверстия. После этого через отверстие вводят клей, заполняя пространство вокруг компонента(ов) внутри трубки и образуя клеевое соединение по всей окружности компонента(ов).
Токопроводящие проводники 40, прикрепленные к кольцевым электродам на дистальном узле 17, проходят через первый просвет 30 промежуточной секции 14 (ФИГ. 2A), через центральный просвет 18 корпуса катетера 12 и через рукоятку управления 16, а их проксимальные концы закреплены в разъеме (на фигуре не показан), который подключен к соответствующему монитору или другому устройству для регистрации и отображения данных, полученных от кольцевых электродов. Часть токопроводящих проводников 40, проходящих через центральный просвет 18 корпуса катетера 12, рукоятку управления 16 и проксимальный конец промежуточной секции 14, заключена в защитную оболочку 63, которая может быть изготовлена из любого соответствующего материала, предпочтительно полиимида.
В дистальном узле 17 или рядом с ним, например, в дистальном конце промежуточной секции 14, установлен электромагнитный датчик положения (на фигуре не показан). Кабель датчика 36 проходит от датчика через просвет 30 промежуточной секции (вместе с электродными токопроводящими проводниками 40) в центральный просвет 18 корпуса катетера 12 и рукоятку управления, где заканчивается на соответствующем разъеме (на фигуре не показан).
В представленном на ФИГ. 6 и 7A варианте осуществления рукоятка управления 16 включает в себя самофиксирующийся узел управления отклонением 13, приводимый в действие кулачковым приводом, который включает в себя ручку отклонения 50 для двунаправленного отклонения промежуточной секции 14 с помощью пары вытягивающих проволок 42. Каждая вытягивающая проволока 42 изготовлена из соответствующего металла, такого как нержавеющая сталь или нитинол. В предпочтительном варианте осуществления каждая вытягивающая проволока имеет покрытие с низким коэффициентом трения, например, тефлоновое покрытие (Teflon.RTM) или т.п. Диаметр каждой вытягивающей проволоки предпочтительно находится в диапазоне от приблизительно 0,15 мм (0,006 дюйма) до приблизительно 0,30 мм (0,012 дюйма). Предпочтительно обе вытягивающие проволоки имеют одинаковый диаметр. Вместо круглых вытягивающих проволок можно использовать плоские вытягивающие проволоки. При этом размеры их поперечного сечения должны быть такими, чтобы обеспечить прочность на разрыв, сопоставимую с прочностью круглых вытягивающих проволок.
В альтернативном варианте осуществления вытягивающие проволоки могут быть частично или полностью заменены на растянутые волокна. Волокна могут быть изготовлены из высокомодульного материала, предпочтительно с предельной прочностью на разрыв по существу в диапазоне 2 480-3 200 МПа (412-463 тыс. фунтов на кв. дюйм), например, полиэтилена высокой плотности (например, Spectra™ или Dyneema™), пряденого параарамидного волокна (например, Kevlar™), пряденого жгута из расплавленных жидкокристаллических полимерных волокон (например, Vectran™) или высокопрочного керамического волокна (например, Nextel™). В рамках настоящего документа термины «волокно» и «волокна» являются взаимозаменяемыми в том смысле, что растянутое волокно может иметь тканую или оплетенную структуру. В любом случае эти материалы обладают гибкостью, обеспечивая соответствующую продолжительность службы при использовании в намотке на ролики и т.п. и лучшую управляемость отклонением кончика катетера. Кроме того, такие материалы по существу не растягиваются, что улучшает ответную реакцию на манипуляции рукоятки управления, и являются немагнитными, благодаря чему они по существу являются прозрачными для МРТ. Низкая плотность материала позволяет ему оставаться по существу прозрачным для рентгеновского аппарата. Материалы также являются непроводящими во избежание короткого замыкания. Материал Vectran™, например, имеет высокую прочность и износоустойчивость, является электрическим изолятором, немагнитен; представляет собой полимерный материал с низкой деформацией растяжения в условиях длительного нагружения. Поэтому следует понимать, что используемый в настоящем документе термин «проволока» может представлять собой проволоку, растянутое волокно или растянутый элемент, содержащий сегмент(ы) из проволоки и сегмент(ы) из растянутого волокна.
Как представлено на ФИГ. 1, рукоятка управления 16 содержит по существу удлиненный корпус рукоятки, который может быть изготовлен из любого соответствующего жесткого материала. Корпус может быть выполнен в виде цельной конструкции или состоять из двух противоположных половин 16a и 16b, соединенных клеем, ультразвуковой сваркой или иными соответствующими способами. Узел управления отклонением 13 обеспечивает двунаправленное отклонение промежуточной секции 14 в ответ на действия пользователя по отношению к ручке 50. Узел управления отклонением задает по существу центральную ось вращения 60 относительно входящих в него компонентов. Ось 60 по существу перпендикулярна продольной оси 64 рукоятки управления.
В представленном варианте осуществления узел управления 13 включает в себя первую ручку управления 50 (ФИГ. 8A и 8B), установленную снаружи корпуса рукоятки 16a, механизм сцепления 54 в рукоятке управления 16, роликовый рычаг 62 (ФИГ. 9A и 9B) в рукоятке управления 16 и вал привода механизма сцепления 58 (ФИГ. 11), который проходит в поперечном направлении через рукоятку управления 16, при этом роликовый рычаг 62 и механизм сцепления 54 установлены на валу 58. Механизм сцепления включает в себя вращательно соединенный с валом фрикционный диск 57 и корпус механизма сцепления 56 (ФИГ. 11A и 11B), который обеспечивает создающую трение поверхность, порождающую фрикционный крутящий момент, когда они с фрикционным диском находятся в контакте друг с другом. Механизм сцепления также включает в себя упорную шайбу 59 для фрикционного диска 57 и компрессионную подпружиненную шайбу 61 (ФИГ. 12), придающую ручке 50 свойство самофиксирования, так что установленное пользователем отклонение поддерживается без необходимости постоянного удержания ручки 50 пользователем.
В соответствии с целями настоящего изобретения вал 58 выполнен с возможностью перемещения в ответ на усилие, приложенное пользователем к ручке 50. В описанном варианте осуществления нажатие ручки 50 приводит к поступательному перемещению вала, вызывающему расцепление механизма сцепления, а вращение ручки 50 приводит к вращательному перемещению вала, вызывающему воздействие роликового рычага на вытягивающие элементы 42.
В представленном на ФИГ. 10 варианте осуществления вал привода механизма сцепления 58 имеет по существу цилиндрический корпус 65 с двумя концами 66a и 66b и заданной длиной, которая меньше ширины рукоятки управления 16. Как представлено на ФИГ. 7A, первый конец 66a удерживается половиной корпуса рукоятки 16a и проходит наружу через отверстие 70 в половине корпуса рукоятки 16a, в которой установлена втулка радиального подшипника 71. Затем первый конец 66a проходит через аксиальный подшипник скольжения 73 (ФИГ. 13) наружу из половины корпуса рукоятки 16a, при этом на первом конце 66a установлена ручка 50. Ручка проходит в плоскости x/z 84 (ФИГ. 6), по существу перпендикулярной валу 58, проходящему вдоль оси y.
Как представлено на ФИГ. 7А, в рукоятке управления 16 вал 58 проходит через центральное отверстие 68 корпуса механизма сцепления 56 (в котором установлен радиальный подшипник 69 (ФИГ. 14), который может быть отделен от корпуса механизма сцепления 56 или может быть его частью). Второй конец 66b вала проходит в направлении противоположной половины корпуса 16b. Таким образом, вал 58 задает ось вращения 60, перпендикулярную продольной оси 64 рукоятки управления.
Как представлено в изображенном на ФИГ. 10 варианте осуществления, первый конец 66a вала 58, на котором установлена ручка 50, имеет две внешние зазубренные части, образующие с двумя противоположными плоскими поверхностями 76 более тонкое поперечное сечение 75. Вдоль более тонких сечений 75 поперек оси корпуса вала 65 между двумя плоскими поверхностями 76 проходит первое сквозное отверстие 77 для установки ручки с помощью шарнирного штифта 78 (ФИГ. 6). Первое сквозное отверстие 77 имеет сечение вытянутой или овальной формы с длинной осью, ориентированной продольно вдоль корпуса вала 65. С первым сквозным отверстием 77 связано неполное отверстие 79, проходящее в продольном направлении между первым сквозным отверстием 77 и смежным торцом 81 корпуса вала. В неполное отверстие 79 вводят регулировочный винт 81 (ФИГ. 6) для корректировки положения шарнирного штифта 78 в отверстии 77. На корпусе вала 65 закреплена упорная шайба 59 (например, напаянная шайба), которая аксиально и вращательно зафиксирована на валу. На шайбе 59 с помощью клея или иным способом закреплен фрикционный диск 57, который также аксиально и вращательно зафиксирован на валу 58. Фрикционный диск 57 может быть изготовлен из любого создающего трение материала, например, литых листов органических или полуметаллических композиций, включая матрицу из керамических соединений, минеральных волокон и медных волокон, обеспечивающих коэффициент трения в диапазоне приблизительно 0,45-0,55.
Как представлено на ФИГ. 7A, снаружи от упорного диска 59 находится компрессионная подпружиненная шайба 61, например, тарельчатая шайба (ФИГ. 12). Внутри непосредственно рядом с фрикционным диском 57 находится корпус механизма сцепления 56. В представленном на ФИГ. 11A и 11B варианте осуществления корпус 56 имеет цельный корпус 53 с центральным отверстием 68, которое сообщается с круговой выемкой 83 большего размера, обращенной к фрикционному диску 57, упорному диску 59 и компрессионной подпружиненной шайбе 61. В центральное отверстие 68 с установленным в нем радиальным подшипником 69 входит вал 58, на котором установлен корпус механизма сцепления 56. Однако выемка 83 по существу закрыта и образует внутреннюю полость 113, поскольку в цельном корпусе 53 есть множество отверстий 67 в окружающих выемку 83 периферийных областях для размещения крепежных винтов 74 для закрепления корпуса механизма сцепления 56 на внутренней поверхности 115 корпуса рукоятки управления 16a. Диаметр выемки 83 выполнен несколько большим, чем по существу аналогичный диаметр фрикционного диска 57, упорного диска 59 и шайбы 61, для создания зазора под эти компоненты. Выемка 83 имеет аксиальную глубину в направлении оси y, которая меньше толщины корпуса механизма сцепления 56, но больше суммарной толщины указанных компонентов, для создания зазора с возможностью отведения фрикционного диска 57 из контакта с внутренней поверхностью 117 выемки 83 вдоль оси вращения 60 в полости 113, когда расцепляют механизм сцепления, как описано ниже.
Дополнительно в направлении второго конца 66b вала 58 (ФИГ. 10) выполнено сквозное отверстие 82 для установки роликового рычага 62 с помощью запрессовываемого соединительного штифта 83, который аксиально и вращательно соединяет роликовый рычаг 62 с корпусом вала 65. В центральное отверстие 121 роликового рычага 62 может быть установлен радиальный подшипник 119 (ФИГ. 16). Ролик 123 (ФИГ. 15) занимает соответствующее сквозное отверстие 125 в противоположных от центрального отверстия 121 направлениях.
Как представлено на ФИГ. 17A-17C, вытягивающие проволоки 42 входят в рукоятку управления 16 через порт на дистальном конце рукоятки управления. Вытягивающие проволоки входят в роликовый рычаг 62 через паз 127 (ФИГ. 9B), и каждая проволока оборачивается или обматывается вокруг соответствующего ролика 123 на 180 градусов перед выходом из роликового рычага через паз 127. Проксимальный конец каждого вытягивающего элемента 42 закреплен в фиксаторе 147, неподвижном относительно рукоятки управления 16. При повороте ручки 50 в одном направлении роликовый рычаг 62 поворачивается в этом направлении на валу 58, подтягивая вытягивающий элемент 42 с этой стороны для отклонения промежуточной секции 14 в данном направлении. Аналогичный роликовый рычаг описан в патенте США № 7377906, текст которого полностью включен в настоящий документ путем ссылки.
В соответствии с целями настоящего изобретения, фрикционный крутящий момент, создаваемый между фрикционным диском 57 и корпусом механизма сцепления 56, когда они находятся в контакте друг с другом при зацепленном механизме сцепления, обеспечивает самофиксирование ручки 50 путем создания сопротивления вращению вала 58 и закрепленного на нем роликового рычага 62. Таким образом, в ручке, остающейся в плоскости 84, находящийся в зацепленном состоянии механизм сцепления 54 препятствует повороту ручки отклонения 50 вокруг оси вращения 60. Чтобы расцепить механизм сцепления, ручка 50 выводится из плоскости 84, как описано ниже.
В представленном на ФИГ. 8A и 8B варианте осуществления ручка 50 имеет удлиненный корпус 85 с двумя центральными кулачками 86, двумя торцевыми частями 87 с увеличенными концами 88, обращенную наружу поверхность 89, обращенную вовнутрь поверхность 90 и две боковые поверхности 92. Корпус 85 установлен центральным кулачком 86 на первом конце 66a вала 58 и ориентирован перпендикулярно валу, так что удлиненный корпус 85 задает плоскость 84 (ФИГ. 6). Увеличенные концы 87 позволяют пользователю управлять ручкой 50 с помощью пальцев руки, включая (1) выведение ручки 50 из плоскости для расцепления механизма сцепления 54 и (2) радиальное вращение ручки 50 в положении «вне плоскости» для поворота роликового рычага 62 для двунаправленного отклонения катетера.
Для выведения ручки 50 из плоскости используют два центральных кулачка 86 ручки 50. Между центральными кулачками находится сквозное отверстие 94, проходящее между обращенной наружу и обращенной внутрь поверхностями 89 и 90, для размещения первого конца 66a вала 58. Как лучше представлено на ФИГ. 6, овальное сквозное отверстие 77 в валу 58 совмещено с меньшим сквозным отверстием круглого сечения 95, проходящим через боковые поверхности 92 ручки 50, для размещения шарнирного штифта 78, создающего ось 199 для выведения ручки 50 из плоскости 84 и возврата ручки. Необходимо отметить, что сквозное отверстие 94, в котором размещается первый конец 66a вала 58, имеет по существу больший размер, чем первый конец 66a, так что у первого конца 66a остается достаточно пространства для перемещения в сквозном отверстии 94 при выведении ручки 50 из плоскости 84 для расцепления механизма сцепления 54. Латеральное положение шарнирного штифта 78 в сквозном отверстии 77 регулируется с помощью вводимого в неполное аксиальное отверстие 79 стопорного винта 80, тем самым регулируя величину выводящего из плоскости перемещения ручки 50.
Как лучше всего представлено на ФИГ. 8A, каждый центральный кулачок 86 ручки образован кулачковым выступом 97 на обращенной внутрь поверхности 90. Каждый кулачковый выступ 97 имеет по существу плоскую контактную поверхность 99 длины L, которая несколько превышает диаметр вала 58, и две изогнутые контактные поверхности («скругленные углы») 100 на противоположных сторонах плоской контактной поверхности 99. Указанные углы 100 выгодно отличаются от плоских контактных поверхностей 99 за счет расстояния до сквозного отверстия 77 и/или шарнирного штифта 78, вокруг которого вращается ручка 50. Таким образом, выведение ручки 50 из плоскости 84 изменяет участок зацепления кулачковых выступов 97 за внешнюю поверхность 101 аксиального подшипника скольжения 73 с плоской поверхности 99 на один из углов 100. Это изменение в участке зацепления кулачка приводит к аксиальному поступательному перемещению вала 58 относительно корпуса рукоятки для расцепления механизма сцепления, как более подробно описано ниже.
Как представлено на ФИГ. 7A и 7B, механизм сцепления 54 включает в себя корпус 56, фрикционный диск 57, упорную шайбу 59 и компрессионный подпружиненный диск 61, каждый из которых установлен на валу 58 и аксиально и вращательно соединен с ним. Используя внутреннюю поверхность 115 половины корпуса 16a, компрессионный подпружиненный диск 61 предварительно нагружает фрикционный диск 57, прижимая его к внутренней поверхности 117 выемки 83 корпуса механизма сцепления 56 и создавая фрикционный крутящий момент, препятствующий повороту вала 58. Таким образом, в положении ручки отклонения 50 «в плоскости» (ФИГ. 7A) ручка оказывается устойчива к вращению и предпочтительным образом остается в любом радиальном положении в плоскости x/z 84, установленном пользователем для получения требуемого отклонения катетера, до расцепления механизма сцепления 54 пользователем.
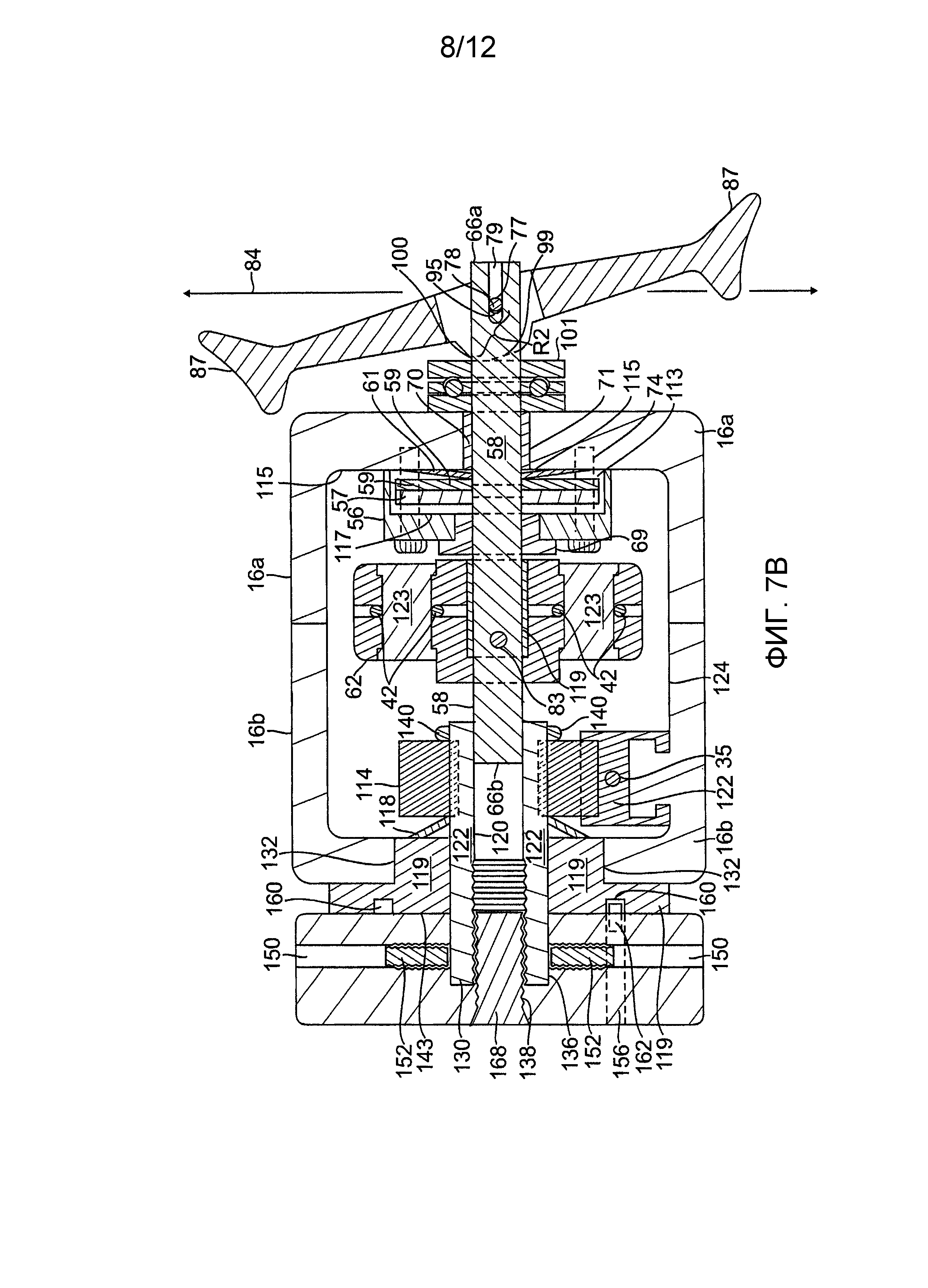
Чтобы расцепить механизм сцепления 54, пользователь выводит ручку 50 из плоскости 84 путем нажатия в направлении внутрь на любой из двух увеличенных торцевых частях 87 (ФИГ. 7B). Когда ручка 50 таким образом выводится из плоскости, участок зацепления кулачка за внешнюю поверхность 101 аксиального подшипника скольжения 73 изменяется с плоских поверхностей 99 кулачковых выступов 97 на верхний или нижний набор кулачковых углов 100 - на тот, который оказывается ближе к нажатой пользователем увеличенной торцевой части 87. Такое изменение увеличивает расстояние между поверхностью зацепления на аксиальном подшипнике скольжения 73 и осью вращения 96 (ФИГ. 6) от расстояния R1 до расстояния R2, что позволяет переместить шарнирный штифт 78/ось вращения 96 в направлении наружу и приводит к поступательному перемещению вала 58 в направлении наружу. Поскольку фрикционный диск 57 (вместе с упорной шайбой 59 и компрессионной подпружиненной шайбой 61) механизма сцепления 54 закреплен на валу 58, фрикционный диск 57 также перемещается в направлении наружу и выводится из фрикционного контакта с поверхностью выемки 117 корпуса механизма сцепления 56. В результате этого механизм сцепления 54 расцепляется, обеспечивая свободу вала 58 для вращения пользователем с помощью ручки 50. Таким образом, вращение ручки 50 облегчается при расцеплении механизма сцепления только в том случае, когда ручка 50 выводится из плоскости 84.
Необходимо понимать, что аксиальный подшипник скольжения может быть составной частью половины рукоятки 16a. Например, если корпус рукоятки управления изготовлен из поликарбонатного материала с 30% стеклянного наполнителя, он может включать в себя приблизительно 10-15% материала Teflon® для снижения статического и динамического контактного трения между кулачковыми выступами 97 и внешней поверхностью корпуса рукоятки при повороте ручки 50. Более того, аксиальный подшипник скольжения шарикового типа может быть заменен на более дешевую металлическую шайбу, расположенную между кулачковыми выступами 97 и внешней поверхностью корпуса рукоятки (для снижения трения о поверхность рукоятки), при этом корпус рукоятки изготавливают методом литья под давлением из полимерной композиции, в состав которой добавлены модификаторы трения (например, тефлон, силикон или углеволокно) для обеспечения однородного и плавного перемещения ручки 50 при приведении в действие.
Поскольку при расцеплении механизма сцепления 54 компрессионная подпружиненная шайба 61 оказывается прижатой к половине корпуса рукоятки управления 16a, компрессионная подпружиненная шайба 61 стремится обеспечить обратное соединение механизма сцепления. Иными словами, как только пользователь отпускает выведенную из плоскости ручку 50, компрессионная подпружиненная шайба 61 возвращается обратно к исходной форме, таким образом автоматически перемещая вал 58 в направлении вовнутрь и прижимая фрикционный диск 57 обратно к поверхности выемки 117, восстанавливая фрикционный контакт. Такое поступательное перемещение возвращает ручку 50 обратно в плоскость 84 (ФИГ. 7A), где кулачковыми поверхностями контакта с аксиальным подшипником скольжения 73 снова становятся плоские поверхности 99. Механизм сцепления 54 снова находится в сцепленном состоянии, а ручка 50 сопротивляется повороту.
Поскольку каждая отклоняющая вытягивающая проволока 42 может испытывать многократные изгибы вокруг ролика 123, расположенный в рукоятке управления сегмент каждой вытягивающей проволоки, и в особенности часть, огибающая ролики, может содержать сегмент из растянутого волокна, такого как описан выше, который лучше переносит указанные нагрузки. Для соединения проксимального конца каждого из первого и второго дистальных сегментов вытягивающей проволоки 42D с дистальным концом соответствующего проксимального сегмента из растянутого волокна 42P предусмотрен обжимной разъем 129 (ФИГ. 17A-17C).
Как представлено на ФИГ. 6 и 7A, по существу в другой половине корпуса 16b находится второй приводной узел вытягивающей проволоки 110, который включает в себя вал 112 с частичным внешним шлицем, цилиндрическую прямозубую передачу 114, соединенную с валом 112 с возможностью вращения путем зацепления внутреннего шлица с внешним шлицем, обеспечивающий поступательное перемещение элемент 116, реагирующий на вращение вала 112, компрессионную подпружиненную шайбу 118 и поворотную ручку активации 52. Понятно, что цилиндрическая прямозубая передача 114 может быть выполнена в виде единого целого с шлицевым валом 112 как один компонент, как показано на ФИГ. 19. Для снижения себестоимости производства комбинация цилиндрической прямозубой передачи и вала может быть единым элементом, изготавливаемым методом литья под давлением. Вал и прямозубая передача могут быть изготовлены из отлитого под давлением металлического порошка, или вал может быть металлическим (например, из латуни типа 260 или нержавеющей стали), а пластиковая цилиндрическая прямозубая передача может быть напрессована на металлический вал. Вал 112 имеет продольное отверстие 120. На внутреннем конце в отверстие входит второй конец 66b вала привода механизма сцепления 58 первого приводного узла 13. Второй конец 66b имеет несколько меньший диаметр по сравнению с отверстием 120, так что валы 58 и 112 могут вращаться независимо друг от друга, а второй конец 66b может при необходимости поступательно перемещаться от вала 112. Таким образом, хотя вал 58 первого приводного узла и вал 112 второго приводного узла выровнены в аксиальном направлении, между ними отсутствует жесткое соединение с возможностью вращения.
В описанном варианте осуществления обеспечивающий поступательное перемещение элемент представляет собой рейку 116, расположенную под цилиндрической прямозубой передачей 114 (или системой цилиндрической прямозубой передачи, которая в настоящем документе считается взаимозаменяемой) в зацеплении с ней, так что вращение цилиндрической прямозубой передачи 114 приводит рейку 116 в поступательное движение (стрелка 131) в продольном направлении 64 рукоятки управления 16. Рейка 116 установлена на приподнятом ребре (направляющей) 122, сформированном на внутренней поверхности 124 половины корпуса рукоятки управления 16b. Направляющая 122 обеспечивает перемещение рейки 116 в продольном направлении. Необходимо понимать, что вращение поворотной ручки 52 в одном направлении приводит к поступательному перемещению рейки в дистальном направлении, а поворот в другом направлении приводит к поступательному перемещению рейки в проксимальном направлении. На рейке 116 закреплен проксимальный конец третьего вытягивающего элемента 35, так что поступательное перемещение рейки воздействует на третий вытягивающий элемент для управления другим элементом конструкции катетера, например, для сжатия спиралевидного элемента дистального узла.
Как лучше всего представлено на ФИГ. 7A, поворотная ручка активации 52 установлена на внешнем конце 130 вала 112, проходящего через сквозное отверстие 132 в половине корпуса рукоятки управления 16b. В сквозном отверстии 132 установлен радиальный подшипник 119 (ФИГ. 18A и 18B), который может быть отлит в виде единого целого с половиной корпуса 16b. Таким образом, любая из половин корпуса или обе половины корпуса могут быть изготовлены из пластикового материала со стекловолокном, например, с добавлением приблизительно 30% стекловолокна, для сведения к минимуму риска постоянной деформации в условиях долговременного нагружения при сжатии различных шайб. Подшипник 119 может представлять собой втулочный подшипник, изготовленный из металлокерамики для защиты от постоянной деформации («течения металла») корпуса рукоятки в условиях долговременного нагружения при сжатии.
В представленном на ФИГ. 20 варианте осуществления поворотная ручка активации 52 имеет форму диска с круглым поперечным сечением. Внешний конец 130 вала 112 входит в центральное неполное отверстие 136 поворотной ручки активации 52. С центральным неполным отверстием 136 поворотной ручки 52 связаны два расположенных напротив друг друга радиальных отверстия 150. В каждое отверстие 150 вводят стопорный винт 152 до фрикционного контакта с валом 112 для вращательного соединения поворотной ручки 52 и вала 112. В поворотной ручке активации 52 также выполнено нецентральное сквозное отверстие 156, параллельное валу 112. Отверстие 156 связано с пазом C-образной формы 160, расположенным на обращенной наружу поверхности 143 подшипника 119 (ФИГ. 18A). В отверстие 156 запрессован штифт 162, конец которого входит и перемещается по пазу 160. Концы 164 паза играют роль ограничителей для штифта 162, ограничивая степень вращательного перемещения поворотной ручки 52 при установке минимального и максимального хода третьей вытягивающей проволоки 35 для регулирования дистального узла 17. Необходимо понимать, что паз 160 может быть отлит зацело с половиной корпуса рукоятки управления 16b.
Второй крепежный винт 168 фиксирует поворотную ручку 52 на валу 112. Крепежный винт 168 также обеспечивает возможность постепенной регулировки трения для придания поворотной ручке 52 свойства самофиксирования путем регулирования аксиального сжатия установленных на вал 112 компонентов, в особенности компрессионной подпружиненной шайбы 118. Винт 168 входит в центральное отверстие 138 поворотной ручки 52, связанное и выровненное в аксиальном положении с большим отверстием 136. Винт 168 входит в зацепление с валом 112 через отверстие 120 в нем. Установленное на валу 112 стопорное кольцо 170 (ФИГ. 7A) фиксирует вал 112 относительно цилиндрической прямозубой передачи 114. Стопорное кольцо 170 фиксирует на месте второй узел, а также предварительно поджимает компрессионную шайбу 118 к подшипнику 119, обеспечивая самофиксирование ручки 52.
В процессе эксплуатации в организм пациента вводят соответствующий интродьюсер, дистальный конец которого устанавливают в желаемом положении. Примером интродьюсера, допустимого для использования совместно с настоящим изобретением, является оплетенный интродьюсер Preface.TM. производства компании Biosense Webster, Inc. (г. Даймонд-Бар, штат Калифорния). Дистальный конец интродьюсера направляют в одну из камер сердца, например, в одно из предсердий. Катетер, выполненный в соответствии с вариантом осуществления настоящего изобретения, продвигают через интродьюсер до тех пор, пока его дистальный конец не выходит за пределы дистального конца интродьюсера. Пока катетер продвигают через интродьюсер, дистальный узел 17 находится в выпрямленном состоянии, чтобы беспрепятственно проходить через интродьюсер. После того как дистальный конец катетера устанавливают в необходимом положении, интродьюсер вытягивают в проксимальном направлении, позволяя гибкой промежуточной секции 14 и дистальному узлу 17 выходить за пределы интродьюсера, после чего дистальный узел 17 вновь приобретает исходную форму благодаря материалу с эффектом памяти формы.
В положении ручки отклонения 50 «в плоскости» механизм сцепления находится в сцепленном состоянии, так что ручка отклонения 50 устойчива к вращению. Однако после выведения ручки отклонения 50 «из плоскости» пользователь расцепляет механизм сцепления 54, так что рукоятка 50 может быть повернута для активации роликового рычага 62 и отклонения промежуточной секции 14. Поворот ручки отклонения 50 в одном направлении приводит к отклонению промежуточной секции 14 в этом направлении. Поворот ручки отклонения 50 в противоположном направлении приводит к отклонению промежуточной секции 14 в противоположном направлении. После достижения желаемого отклонения пользователь отпускает ручку 50, которая сразу же возвращается в положение «в плоскости», снова приводя механизм сцепления в сцепленное состояние для придания ручке свойства самофиксирования.
Затем пользователь может скорректировать по существу кольцевую основную область 39 дистального узла 17 путем вращения поворотной ручки 52 в одном направлении для сжатия и уменьшения размера по существу кольцевой основной области или в противоположном направлении для ослабления и увеличения ее размера. Регулируя положение поворотной ручки 52, по существу кольцевую основную область 39 корректируют для обеспечения возможности ее введения в легочную вену или иную трубчатую структуру. В описанном варианте осуществления при вращении поворотной ручки в одном направлении сжимающая проволока 35 вытягивается в проксимальном направлении для сжатия и уменьшения диаметра по существу кольцевой основной области 39, а при вращении поворотной ручки в другом направлении натяжение третьего вытягивающего элемента или сжимающей проволоки 35 ослабляется для высвобождения по существу кольцевой основной области 39 и возврата ее диаметра к исходному значению. Предпочтительно, чтобы по меньшей мере 50%, более предпочтительно - по меньшей мере 70%, а в наиболее предпочтительном варианте - по меньшей мере приблизительно 80% длины контура по существу кольцевой основной области соприкасалось с внутренним контуром трубчатого участка. После достижения требуемой длины контура пользователь отпускает поворотную ручку 52, которая также самостоятельно фиксируется. Кольцевое расположение электродов на по существу кольцевой области 39 позволяет измерить электрическую активность по контуру трубчатой структуры, что позволяет выявлять эктопические систолы между электродами. Размер по существу кольцевой основной области 39 позволяет измерить электрическую активность по диаметру легочной вены или другой трубчатой структуры сердца или в области сердца благодаря тому, что диаметр кольцевой основной области по существу соответствует диаметру легочной вены или иной трубчатой структуры. Поскольку валы 58 и 112 не соединены друг с другом с возможностью вращения, каждый вал может вращаться независимо от другого, поэтому каждый приводной узел может работать независимо от другого.
Предшествующее описание изложено со ссылкой на предпочтительные в данное время варианты осуществления настоящего изобретения. Специалистам в области техники и технологии, к которой принадлежит данное изобретение, будет понятно, что описанная конструкция допускает модификации и изменения, не нарушающие принципы и сущность настоящего изобретения и не выходящие за рамки его объема. Например, катетер может быть выполнен таким образом, что третья вытягивающая проволока будет обеспечивать выдвижение и втягивание другого компонента, такого как направляющая проволока или игла. Специалисту в данной области техники будет понятно, что представленные фигуры необязательно выполнены в масштабе. Таким образом, предшествующее описание не следует толковать как относящееся только к конкретным конструкциям, описанным и представленным на сопроводительных фигурах. Его следует воспринимать как соответствующее и создающее основу для приведенной ниже формулы изобретения, отражающей полный объем настоящего изобретения.
Реферат
Группа изобретений относится к области медицинской техники, а именно к рукоятке управления для медицинских устройств, в частности к рукоятке управления с множеством механизмов для управления множеством вытягивающих проволок, а также к катетеру, содержащему такую рукоятку. Рукоятка управления для медицинского устройства, имеющего по меньшей мере первый регулируемый пользователем элемент конструкции и по меньшей мере первый вытягивающий элемент для управления первым элементом конструкции, содержит: корпус и первый приводной узел. Первый приводной узел содержит: первый исполнительный элемент, вал, роликовый рычаг и механизм сцепления. Длина вала определяет первую ось вращения, при этом первый исполнительный элемент установлен на валу и выполнен с возможностью размещения в плоскости, по существу перпендикулярной валу. Роликовый рычаг установлен на валу и соединен с ним с возможностью вращения, при этом роликовый рычаг выполнен с возможностью активации первого вытягивающего элемента при вращении вала. Механизм сцепления выполнен с возможностью сцепления и расцепления. Механизм сцепления имеет фрикционный диск и создающую трение поверхность. Фрикционный диск установлен на валу и соединен с ним с возможностью вращения. Фрикционный диск находится в контакте с создающей трение поверхностью в сцепленном состоянии и не контактирует с создающей трение поверхностью в расцепленном состоянии механизма сцепления. Вал выполнен с возможностью поступательного перемещения вдоль своей длины под действием первого исполнительного элемента, когда первый исполнительный элемент выводится из плоскости для расцепления
Комментарии