Инструмент для введения - RU2452376C2
Код документа: RU2452376C2
Чертежи




























Описание
Область техники, к которой относится изобретение
Изобретение относится к инструменту для введения чрескожного датчика, способного регистрировать компоненты крови пациента, такого как датчик глюкозы. Инструмент для введения содержит узел иглы с иглой для введения, которая до и во время введения соединена с корпусом датчика, содержащего сенсорную часть, которая должна быть введена пациенту подкожно.
Уровень техники
US 2002/0077599 A1 касается инструмента для введения, предназначенного для низкопрофильного наклонного инфузионного набора, где инструмент содержит корпус инструмента для введения, имеющий нижнюю стенку, и держатель, присоединенный к корпусу инструмента для введения с возможностью скольжения, для перемещения между втянутым и выдвинутым положениями в направлении, по существу параллельном нижней стенке. Инструмент для введения также содержит базовую деталь, присоединенную к внешней поверхности корпуса инструмента для введения. Держатель выполнен с возможностью разъемного размещения корпуса датчика. При использовании держатель 30 перемещается вперед и вводит иглу 27 и датчик 26 через кожу под соответствующим углом в подкожный слой на соответствующее расстояние. Корпус 28 датчика после этого может быть освобожден из узла 10 инструмента для введения путем нажатия пусковой кнопки 66. После этого установочная площадка 80 закрепляется на коже, а игла 27 удаляется, оставляя датчик 26 на месте. Эта ссылка касается довольно сложной конструкции, и ее сложность вызывает необходимость использовать две части корпуса, верхнюю и нижнюю, сами же части корпуса могут быть изготовлены из любого подходящего материала и удерживаться вместе с помощью винтов (23, фиг.5), блокировочных шпонок, клея, тепловой установки на опоры или их сочетания, а также любого иного известного крепежного средства.
Инструмент для введения, описанный в US 6.293.925 B1, содержит шприц и набор для введения. Шприц выполнен с возможностью введения иглы через кожу под выбранным углом введения, а также с управляемой силой и скоростью введения. Шприц содержит подпружиненный поршень с головкой для приема и удерживания набора для введения в положении инструмента для введения, выступающего наружу для чрескожного вживления пациенту. Поршень выполнен с возможностью втягивания и удерживания в запертом положении, при этом приводная пружина сжата так, чтобы сообщить заданное усилие головке поршня. На Фиг.30 и 31 показано, как набор 14 для подкожного введения собран со шприцом при подготовке шприца к работе.
Раскрытие изобретения
Задача изобретения заключается в обеспечении простого и недорогого инструмента для введения чрескожного датчика, который будет простым и безопасным в обращении для пользователя в процессе его использования и удаления после использования.
Изобретение касается удаляемого низкопрофильного инструмента для введения чрескожного датчика, при этом инструмент для введения содержит корпус, корпус датчика, втулку иглы, пружинный элемент, а также несущую площадку, при этом
- корпус снабжен направляющим средством на внутренней своей поверхности для обеспечения перемещения несущей площадки, причем корпус образует, по меньшей мере, часть поставляемой упаковки инструмента для введения,
- корпус датчика содержит сенсорную (чувствительную) часть, вводимую под кожу,
- втулка иглы содержит иглу для прокалывания кожи,
- корпус датчика и втулка иглы разъемным образом крепятся друг к другу, и когда они закреплены друг с другом, игла примыкает к датчику; в одном варианте осуществления игла расположена так, чтобы, по меньшей мере частично, окружать датчик;
- несущая площадка снабжена направляющим средством на наружной своей поверхности, обеспечивающим перемещение несущей площадки относительно корпуса между втянутым и выдвинутым положениями;
- пружинный элемент соединен с пусковым средством, причем при срабатывании пускового средства несущая площадка, корпус датчика и втулка иглы под воздействием пружинного элемента перемещаются в выдвинутое положение, в котором игла и сенсорная часть могут быть введены под кожу, если пользователь удерживает устройство возле кожи;
- втулка иглы и несущая площадка снабжены неразъемным средством фиксации.
Термин «примыкает» означает, что игла расположена достаточно близко к датчику для обеспечения подкожного введения датчика, расположен ли датчик внутри, рядом или снаружи иглы для введения.
Согласно одному варианту осуществления изобретения втулка иглы и несущая площадка выполнены как единый блок, например, путем сварки между собой движущейся части корпуса и втулки иглы или путем закрепления иглы для введения непосредственно на движущейся части корпуса. Неразъемное соединение может быть выполнено путем склеивания, сварки или механической блокировки этих двух узлов.
В другом варианте осуществления неразъемное соединение между несущей площадкой и втулкой иглы образовано путем создания отверстий на части втулки иглы, которая накрыта частью непрерывной или сцепленной поверхности корпуса, и путем создания соответствующих выступов на несущей площадке. При размещении корпуса вокруг узла иглы (термин «вокруг» означает, что корпус накрывает узел иглы, по меньшей мере, с двух противоположных сторон) либо благодаря упругим характеристикам корпуса произойдет сжатие с двух противоположных сторон и тем самым будут сжаты между собой втулка иглы и несущая площадка, либо ограниченное пространство с двух противоположных сторон по существу жесткого корпуса приведет к совмещению выступов несущей площадки и отверстий втулки иглы с образованием неразъемного соединения между несущей площадкой и втулкой иглы, т.к. отверстия втулки иглы и выступы несущей площадки идеально совмещаются.
Согласно следующему варианту осуществления изобретения узел иглы фиксируется на инструменте для введения после его использования. Когда узел иглы зафиксирован на инструменте для введения после его использования, пользователь может удалить инструмент для введения и узел иглы, захватив лишь инструмент для введения, вместо того, чтобы удерживать и инструмент для введения, и узел иглы. По варианту осуществления, показанному на Фиг.1-3, узел иглы зафиксирован на инструменте для введения, т.к. перемещение узла иглы может осуществляться лишь в ограниченном пространстве. Ограниченное пространство образовано стенками U-образного корпуса с трех сторон, направляющим средством корпуса и узла иглы с двух сторон, т.к. направляющее средство исключает боковые перемещения, а также стопором 12, т.к. стопор 12 не позволяет узлу иглы выйти вперед за фиксированную точку.
Согласно следующему варианту осуществления изобретения имеется возможность отвести назад узел иглы из выдвинутого положения, в котором игла входит в кожу пациента, во втянутое положение, чтобы уменьшить риск контакта с использованной иглой.
Согласно следующему варианту осуществления изобретения нижняя часть корпуса, где нижняя часть корпуса - ближайшая к пользователю во время введения, может быть продлена и загнута вверх относительно базовой линии (базовая линия - линия, параллельная игле, но лишь на нижнем уровне, сам же термин «нижний уровень» означает уровень, более близкий к пользователю, обычно задаваемый нижней стороной корпуса). Это продолжение или выступ нижней части корпуса обеспечивает должный контакт инструмента для введения с кожей пациента для введения датчика под соответствующим углом, а кроме того, продленная или выступающая нижняя часть приподнимает установочную площадку в соответствующее положение для контакта с кожей.
Согласно одному варианту осуществления концы выступающей части размещены выше линии, образованной иглой/датчиком, перед концом иглы для введения, когда узел иглы находится во втянутом положении. Это требует обеспечения проема в выступающей части для прохождения через него иглы/датчика. Согласно варианту осуществления на Фиг.1-3 это достигается разделением выступающей части на две ножки. В этом варианте осуществления выступающая часть образована непрерывной в математическом смысле кривой, но она также может быть прерывистой, т.е. прерываться в одном или более местах.
В следующем варианте осуществления изобретения корпус выполнен как цельная конструкция. Под цельной конструкцией корпуса втулки иглы следует понимать, что для сборки и крепления оболочки, охватывающей несущую площадку и набор инструмента для введения, не требуются винты или иное крепление. Корпус может быть изготовлен путем формования, т.е. литьевого формования, или иным известным способом. Кроме того, корпус может быть выполнен, например, в виде двух половин, которые затем склеиваются или соединяются сваркой. Корпус может быть выполнен из пластика или металла, а также любого другого пригодного материала с необходимыми механическими свойствами.
Устройство для введения согласно изобретению представляет собой простую конструкцию и содержит сравнительно мало составных частей, что делает его менее дорогостоящим при производстве и сборке. Это позволяет использовать инструмент для введения в качестве одноразового.
В еще одном варианте осуществления корпус выполнен как цельная U-образная конструкция. Корпус имеет U-образную форму, а это означает, что он выполнен из плоского материала прямоугольной или эллиптической формы, изогнутого так, что его концы при виде сбоку образуют две по существу параллельные ножки, соединенные на одном конце по прямой или изогнутой линии, причем эти ножки не обязательно равны по длине. Изогнутая форма конструкции необязательно означает, что был использован изгиб; она могла быть, например, отформована в изогнутом виде. В случае U-образной формы корпуса та ее часть, которая носит название нижней ножки, представляет собой ножку, которая входит в контакт с пользователем, когда инструмент для ведения занимает положение для введения инфузионного устройства.
В другом варианте осуществления корпус выполнен в виде трубки с закругленным профилем или профилем с просечками, выполненными с разных сторон.
В еще одном варианте осуществления пружинный элемент прикреплен к корпусу в первой позиции, а к несущей площадке или узлу иглы во второй позиции, причем в несмещенном положении пружинного элемента первая позиция расположена ближе к переднему краю корпуса, чем вторая позиция. Передний край корпуса - это край корпуса, ближайший к пользователю в процессе введения. В результате при срабатывании пускового средства несущая площадка вместе с втулкой иглы выталкиваются вперед относительно корпуса. Пружинный элемент может быть выполнен из любого материала, который возвращается в несмещенное положение, соответствующее ненагруженному состоянию, например из резины, пластика или металла.
Согласно другому варианту осуществления в несмещенном положении пружинного элемента первая позиция расположена ближе к заднему краю корпуса, чем вторая позиция.
Изобретение также касается инструмента для введения чрескожного датчика, который содержит корпус (1) набора, корпус (3) датчика, втулку (2) иглы, пружинный элемент (13) и несущую площадку (4), при этом
- корпус (1) снабжен направляющим средством (9а, 9b, 9с) на своей внутренней поверхности для направленного перемещения несущей площадки (4),
- корпус (3) датчика содержит сенсорную часть (5), вводимую под кожу,
- втулка (2) иглы содержит иглу (6) для введения для прокалывания кожи,
- корпус (3) датчика и втулка (2) иглы разъемным образом соединены между собой и в их соединенном состоянии игла (6) для введения примыкает к сенсорной части (5),
- несущая площадка (4) снабжена направляющим средством (9e, 9d, 9f) на своей наружной поверхности, которое обеспечивает направленное перемещение относительно корпуса (1) между втянутым и выдвинутым положениями,
- пружинный элемент (13) соединен с пусковым средством (7), причем при срабатывании пускового средства (7) корпус (3) датчика, втулка (2) иглы и несущая площадка (4) под воздействием пружинного элемента переходят в выдвинутое положение, в котором игла (6) и сенсорная часть (5) могут быть введены под кожу; втулка (2) иглы и несущая площадка (4) снабжены неразъемным средством фиксации,
- нижнее основание корпуса (1) выполнено с выступающей частью (10), а выступающая часть (10) образует угол с иглой (6) для введения продольном направлении, задавая пользователю нужный угол при введении.
Согласно варианту осуществления данного инструмента для введения часть выступающей части (10) расположена выше линии, вдоль которой может перемещаться игла (6) для введения, а часть выступающей части (10) расположена ниже упомянутой линии.
Краткое описание чертежей
Ниже приводится более подробное описание изобретения со ссылками на сопровождающие чертежи, на которых показан предпочтительный вариант осуществления изобретения.
На Фиг.1 показан вид сверху/сбоку варианта осуществления инструмента для введения по изобретению с чрескожным датчиком во втянутом положении;
На Фиг.2 показан вид сверху/сбоку инструмента для введения с чрескожным датчиком в выдвинутом положении;
На Фиг.3 показан вид сверху/сбоку инструмента для введения с чрескожным датчиком в выдвинутом положении, где корпус датчика отсоединен от узла иглы;
На Фиг.4 показан вид сверху/сбоку узла иглы, присоединенного к корпусу датчика;
На Фиг.5 показан покомпонентный вид снизу/сбоку другого варианта осуществления инструмента для введения с чрескожным датчиком;
На Фиг.6 показан покомпонентный вид сверху/сбоку инструмента для введения, показанного на Фиг.5, с чрескожным датчиком;
На Фиг.7 показан вид сверху/сбоку инструмента для введения, показанного на Фиг.5, где узел иглы отсоединен от корпуса датчика и находится в выдвинутом положении;
На Фиг.8 показан вид сверху/сбоку третьего варианта осуществления инструмента для введения, подготовленного для доставки;
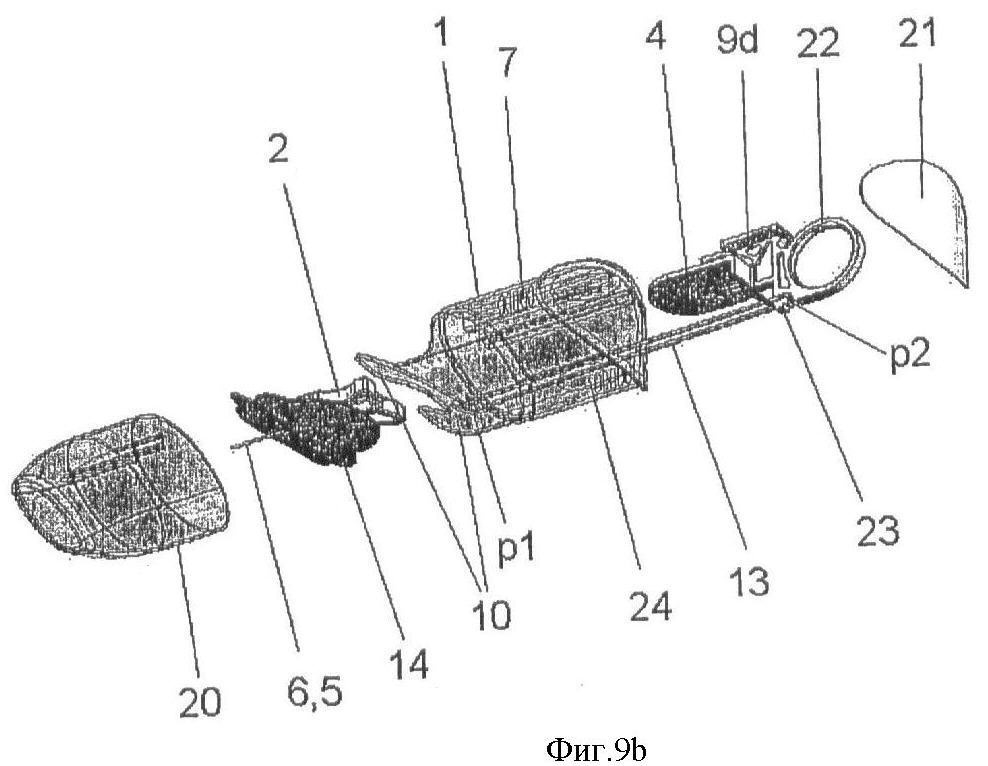
На Фиг.9а и 9b показан покомпонентный вид третьего варианта осуществления;
На Фиг.10 показана несущая площадка по третьему варианту осуществления во втянутом положении, готовая к введению;
На Фиг.11 показан вид сбоку четвертого варианта осуществления с пружинными элементами С-образной формы;
На Фиг.12 показан вид сверху/сзади узла иглы в сочетании с пружинным элементом по четвертому варианту осуществления;
На Фиг.12А показан вид сверху/спереди пружинного элемента, подобного представленному по четвертому варианту осуществления;
На Фиг.13 показаны вид А сбоку, вид В сверху и вид С сзади пятого варианта осуществления изобретения с кольцеобразной пружиной;
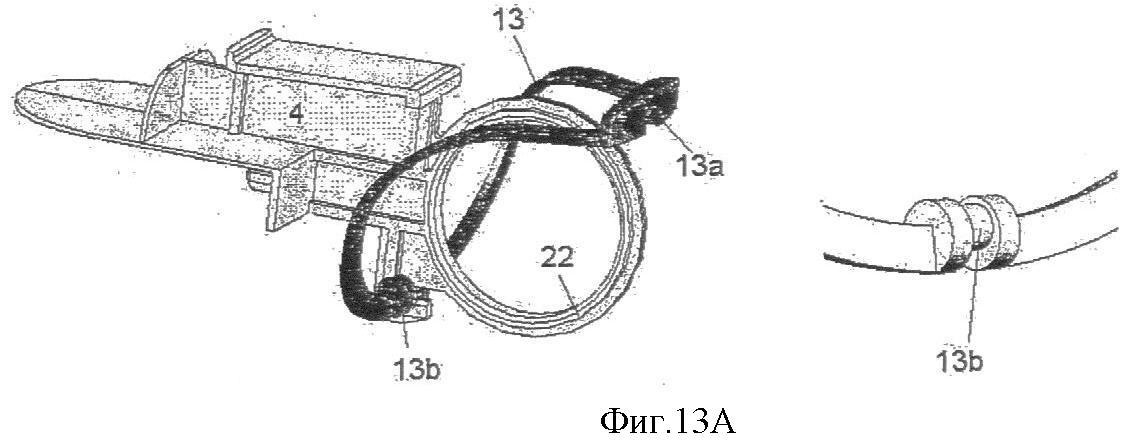
На Фиг.13А показан вид сбоку вторичного варианта осуществления с кольцеобразной пружиной;
На Фиг.14 показан вид сверху шестого варианта осуществления с пружинным элементом S-образной формы;
На Фиг.15 показан вид сбоку седьмого варианта осуществления с цилиндрической винтовой пружиной в переднем положении А и отведенном назад положении В;
На Фиг.16 показан восьмой вариант осуществления с плоской пружиной: А - вид сбоку в переднем положении, В - вид сзади в переднем положении, С - вид сбоку в отведенном назад положении, D - вид сверху в отведенном назад положении;
На Фиг.17 показан девятый вариант осуществления, в котором пружинный элемент прикреплен к противоположным сторонам корпуса, причем этот вариант осуществления представлен как: А - вид сбоку в переднем положении, В - вид сбоку в отведенном назад положении, С - вид сверху в переднем положении, D - вид сверху в отведенном назад положении;
На Фиг.18 показан десятый вариант осуществления инструмента для введения с элементом часовой пружины;
На Фиг.19 показан вид сбоку одиннадцатого варианта осуществления с пружинным элементом S-образной формы;
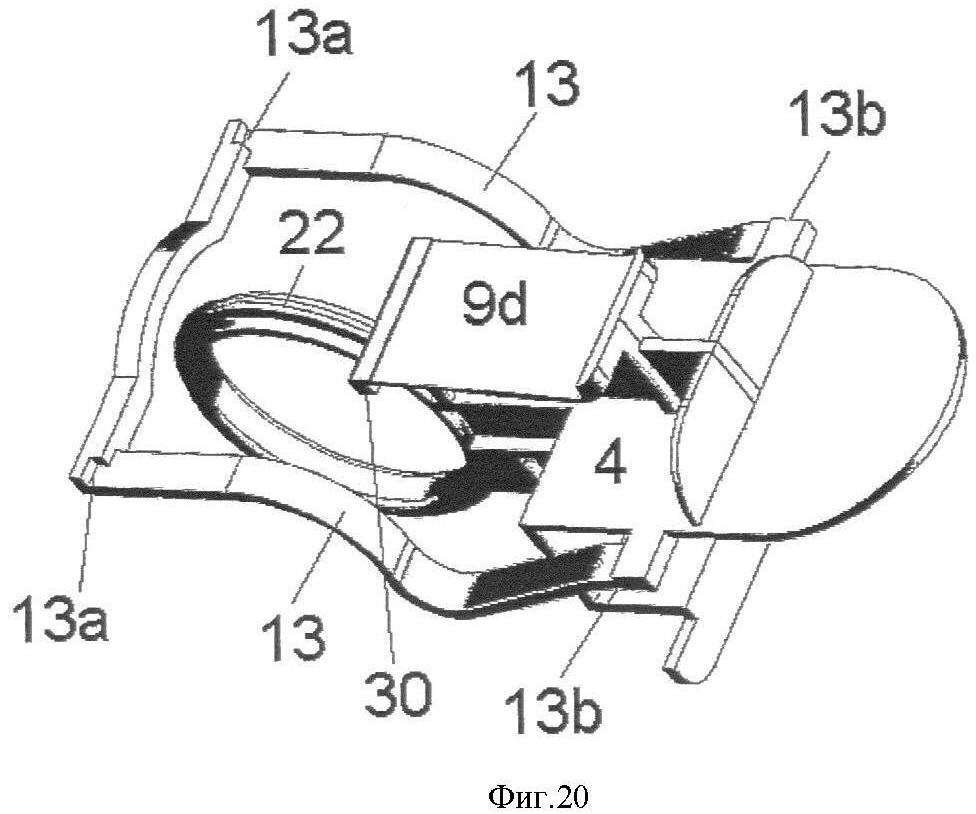
На Фиг.20 показан вид сверху одиннадцатого варианта осуществления с пружинным элементом S-образной формы;
На Фиг.21 показан известный чрескожный датчик, рассчитанный на ручное введение;
На Фиг.22 показан инструмент для введения чрескожного датчика с жесткой крышкой, выведенной из положения, в котором она выполняет защитную функцию;
На Фиг.23 показан инструмент для введения чрескожного датчика после срабатывания пружины;
На Фиг.24 показан инструмент для введения чрескожного датчика, где корпус датчика освобожден от несущей площадки инструмента для введения;
На Фиг.25 показан покомпонентный вид инструмента для введения после освобождения корпуса датчика, где несущая площадка совместно с пружиной удалены из корпуса инструмента для введения;
На Фиг.26 показан инструмент для введения чрескожного датчика после его использования с установленной жесткой крышкой, выполняющей защитную функцию;
На Фиг.27 показан вариант осуществления иглы для введения в сочетании с сенсорной частью.
Набор инструмента для ведения, показанный на Фиг.1-3, содержит корпус 1, узел иглы, который в этом варианте осуществления конструктивно выполнен из втулки 2 иглы, содержащей иглу 6 для введения и несущую площадку 4, соединенную неразъемным образом с втулкой 2 иглы, а также корпус 3 датчика, содержащего выступающую в сторону от него сенсорную часть 5.
Корпус 1 снабжен пусковой кнопкой 7, при срабатывании которой освобождается пружинный элемент 13 и узел 2, 4 иглы, а также корпус 3 датчика перемещаются вперед в выдвинутое положение. При срабатывании кнопки 7 упругая подвижная часть 8 узла иглы подвергается нажиму и освобождается из стопора, который здесь не показан. Упругая подвижная часть 8 показана на Фиг.2, 3 и 7, где узел иглы находится в выдвинутом положении, а также на Фиг.4, где узел иглы показан отдельно от корпуса 1.
На Фиг.1-3 и 5-7 показан вариант осуществления изобретения, в котором корпус 1 имеет U-образную форму с верхней ножкой 1а и нижней ножкой 1b. В этом варианте осуществления верхняя и нижняя ножки параллельны и соединены между собой на одном конце конструктивным элементом с длиной, примерно равной высоте узла 2, 4 иглы. Расстояние между верхней и нижней ножками 1а, 1b зависит от высоты и общей формы узла 2, 4, соединенного с корпусом 3 датчика, а кроме того, расстояние между верхней и нижней ножками 1а, 1b должно быть достаточным для размещения направляющего средства 9а, 9b, 9с, которое удерживает на своем месте узел 2, 4 иглы и корпус 3 датчика при перемещении между втянутым и выдвинутым положениями.
Направляющее средство в корпусе на Фиг.1-3 содержит два противоположных L-образных профиля 9а, полки которых направлены наружу, установленные на нижней ножке 1b и выступающие над ней, кромки 9b, выступающие вниз с верхней ножки 1а, а также кромки 9с, выступающие внутрь от боковых частей верхней ножки 1а, которые соприкасаются с боковыми сторонами 9е узла 2, 4 иглы. Соответствующее направляющее средство узла 2, 4 иглы содержит два L-образных профиля (на фигурах не показаны), полки которых направлены внутрь, установленные на нижней стороне узла 2, 4 иглы, при этом эти профили соответствуют L-образным профилям корпуса 1, полки которых направлены наружу, см. Фиг.5, а также две кромки 9d, установленные на верхней стороне узла 2, 4 иглы и выступающие над ней, которые соприкасаются с верхней ножкой 1а и кромками 9b.
На конце нижней ножки 1b образованы две части 10, которые загнуты вверх. Эти части 10 определяют правильный угол введения для пользователя при введении канюли. Кроме того, части 10 обеспечивают то, что установочная площадка 14, размещаемая совместно с корпусом 3 датчика, находится в нужном положении и в готовности при введении сенсорной части 5.
Для обращения с инструментом обеспечен по существу треугольный профиль 11, выступающий из нижней ножки 1b, т.к. полный функциональный набор инструмента для введения довольно мал и с ним трудно было бы обращаться пользователю, не обладающему должной ловкостью.
Пружинный элемент 13, который выталкивает узел 2, 4 иглы вперед при срабатывании пусковой кнопки 7, показан на Фиг.6 и 7. Пружинный элемент 13 размещен между корпусом 1 и узлом 2, 4 иглы в закрытом конце U-образного корпуса 1. Пружинный элемент 13 прикреплен к выступу 18а на заднем конце втулки 2 иглы, а также к выступу 18b на внутренней поверхности корпуса 1. Пружинный элемент 13 может представлять собой любую подходящую пружину, но в этом варианте осуществления пружинный элемент 13 - предпочтительно цилиндрическая винтовая пружина, которая выталкивает узел 2, 4 иглы из корпуса.
Пружинный элемент 13 может также быть плоской пружиной, размещенной между корпусом 1 и узлом 2, 4 иглы в закрытом конце U-образного корпуса 1, или же пружинный элемент 13 может образовывать упругое соединение между передней частью корпуса 1 и задней частью узла 2, 4 иглы, вытягивая узел 2, 4 иглы вперед.
Для управления перемещением вперед узла 2, 4 иглы, когда использована пусковая кнопка 7, нижняя ножка 1b корпуса 1 снабжена стопором 12. В варианте осуществления на Фиг.1-3 узел 2, 4 иглы прекращает движение вперед, когда соответствующий выступ на узле 2, 4 иглы сталкивается со стопором 12. В варианте осуществления на Фиг.5-7 кромки 9f перемещаются по направляющим 19, выполненным в виде канавок на нижней ножке 1b, и стопор 12а обеспечивается упором кромок 9f в конец одной или обеих направляющих 19.
Если для остановки узла 2, 4 иглы при движении вперед стопор отсутствует, узел 2, 4 иглы остановится, когда передняя часть узла иглы коснется кожи пользователя. Использование стопора 12 облегчает управление глубиной введения, а кроме того, стопор 12 дает возможность зафиксировать узел 2, 4 иглы в корпусе 1, что позволяет удалить инструмент для введения и узел 2, 4 иглы как единое целое после его использования.
В другом предпочтительном варианте осуществления стопор 12 образован торцами верхней и нижней ножек 1а и 1b корпуса 1, имеющего U-образную форму. Если оба торца или один торец ножек 1а и 1b загнуты внутрь, то уменьшается расстояние между верхней и нижней ножками 1а и 1b на открытом конце U-образного корпуса. Если это расстояние уменьшено до величины, меньшей высоты узла 2, 4 иглы, то загнутые внутрь торцы ножек выполняют функцию стопора 12.
На Фиг.5 втулка 2 иглы показана в отделенном от корпуса 3 датчика и несущей площадки 4 состоянии. В этом предпочтительном варианте осуществления втулка 2 иглы содержит два отверстия 15 в задней своей части, и эти отверстия 15 соответствуют двум выступам 16 несущей площадки 4. Если выступы 16 помещены в отверстия 15, втулка 2 иглы и несущая площадка 4 зафиксированы относительно друг друга в горизонтальной плоскости (в этом варианте осуществления горизонтальная плоскость - это плоскость, перпендикулярная поверхностям контакта между отверстиями втулки 2 иглы и выступами несущей площадки 4). Если узел 2, 4 иглы, содержащий втулку 2 иглы и несущую площадку 4 в собранном между собой виде, помещен в корпус 1, ножки 1а и 1b корпуса 1 накрывают узел 2, 4 иглы с двух противоположных сторон и не допускают перемещение в вертикальном направлении.
После изготовления набора инструмента для введения и подготовки его к использованию обычно он доставляется пользователю в упакованном, собранном и стерильном состоянии готовым к применению. Когда пользователь открывает упаковку, узел 2, 4 иглы соединен с корпусом 3 датчика и чрескожный датчик находится во втянутом положении. Установочная площадка 14 помещена на нижней стороне корпуса 3 датчика, а клейкая сторона установочной площадки накрыта прокладочной бумагой. Пользователь снимает прокладочную бумагу с установочной площадки и помещает основание 1b, 10 инструмента для введения на кожу под соответствующим углом, после чего нажимает на пусковую кнопку 7.
При нажатии пусковой кнопки 7 узел 2, 4 иглы вместе с корпусом 3 датчика освобождаются и выталкиваются в выдвинутое положение, при этом датчик вводится под кожу, т.к. игла 6 для введения, расположенная вдоль сенсорной части 5, прокалывает кожу.
Датчик может быть известного типа, как, например, описанный в патенте US 5.586.553, где набор инструмента для введения включает в себя жесткую полую иглу (14) для введения с прорезью для быстрого и легко выполнимого подкожного размещения канюли (15), содержащей дистальный сегмент (16) с одним (или более) сенсорным электродом (18), находящимся в контакте с жидкостью организма пациента через окно (19) канюли (15). Когда игла (14) для введения удаляется, канюля (15) с сенсорным дистальным сегментом (16) и сенсорными электродами (18) остается на месте, выбранном для введения.
Корпус датчика по настоящему документу содержит два направляющих проема и два фиксирующих проема в дополнение к сквозному отверстию. Эти проемы имеют симметричную форму относительно плоскости, в которой лежит центральная ось проходного отверстия, и углубляются перпендикулярно задней части корпуса. Направляющие проемы представляют собой углубленные проемы по существу квадратного сечения, выполненные с возможностью приема стыкуемых направляющих штифтов 17, расположенных на присоединяемой игле или присоединяемой втулке. На Фиг.3, 5, 6 и 7, на которых узел 2, 4 иглы отделен от корпуса 3 датчика, можно видеть направляющие штифты 17 втулки 2 иглы.
Когда сенсорная часть 5 и корпус 3 датчика с установочной площадкой 14 расположены на своем месте, пользователь разблокирует корпус 3 датчика и узел 2, 4 иглы и убирает оставшуюся часть набора инструмента для введения, которая содержит корпус 1 и узел иглы, зафиксированный на корпусе 1. В EP 688232 проиллюстрировано соответствующее разъемное соединение корпуса датчика и втулки иглы, и этот пример включен сюда путем ссылки.
Для того чтобы удалить оставшуюся часть использованного инструмента для введения безопасным образом, пользователь может переместить узел 2, 4 иглы назад во втянутое положение и положить оставшуюся часть инструмента для введения в открытую ранее упаковку.
После удаления инструмента для введения и узла иглы пользователь может соединить корпус 3 датчика, который теперь закреплен на коже пользователя, с соединительным узлом.
Соединительный узел может быть присоединен к соединительному звену типа «Люэр» шлангом. Через соединение типа «Люэр» можно вводить соответствующее лечебное средство, такое как инсулин, подаваемый помпой. Соединительное звено может быть также предохранительным звеном с соответствующим входом для иглы шприца. Такое предохранительное звено может оставаться на месте до трех дней, пока пользователь проходит лекарственную терапию, например, введение через этот вход инсулина, чтобы меньше травмировать кожу.
Набор инструмента для введения по третьему варианту осуществления, показанному на Фиг.8-10, содержит корпус 1, узел иглы, который конструктивно выполнен из втулки 2 иглы, содержащей иглу 6 для введения и несущую площадку 4, соединенную неразъемным образом с втулкой 2 иглы, а также корпус 3 датчика, содержащего сенсорную часть 5.
На Фиг.8 показана возможная поставка по этому варианту осуществления: узел 2, 4 иглы находится в положении релаксации, т.е. в несмещенном или лишь незначительно смещенном вперед положении, и игла закрыта жесткой крышкой 20, которую следует снять перед использованием устройства. Корпус 1 выполнен в виде трубки с овальным профилем. Напротив жесткой крышки 20 корпус 1 имеет съемное плоское покрытие 21. Это плоское покрытие может быть снабжено клеящим веществом для обеспечения плотного прилегания покрытия 21 к корпусу 1 или оно может быть приварено к корпусу, причем можно использовать любое покрытие, которое в то же время обладает необходимой прочностью в условиях транспортировки и обеспечивает герметичность устройства. Узел 2, 4 иглы неразъемным образом соединен с ручкой 22, которая на нижней своей стороне снабжена выступом 23 для крепления пружинного элемента 13 (см. Фиг.9а и 9b). Верхняя сторона несущей площадки 4 снабжена направляющим средством 9d, имеющим форму прямоугольной пластины, причем направляющее средство 9d несущей площадки 4 вставляется в направляющее средство 9b корпуса 1, которое имеет форму выступающего вниз L-образного профиля.
Сочетание L-образного профиля и прямоугольной пластины ограничивает возможность несущей площадки перемещаться вверх и вниз, и ее прохождение вдоль стенки корпуса 1 поддается четкому управлению. Пружинный элемент 13 в этом варианте осуществления состоит из упругого кольца в форме буквы «О». Пружина закреплена на нижней фронтальной части корпуса 1 в позиции р1 и на нижней части несущей площадки 4 в позиции р2. В этом варианте осуществления пружинный элемент 13 закреплен сзади несущей части площадки 4 и под ней, что при смещении пружины приводит несущую площадку 4 в положение с малым наклоном, т.к. лишь нижняя часть несущей площадки 4 вытягивается вперед пружинным элементом 13 и это наклонное положение позволяет зафиксировать несущую площадку 4 в отведенном назад положении, или способствует такой фиксации, поскольку направляющее средство 9d на последней своей половине снабжено выступающей частью 30 (см. Фиг.12, 15, 19, 20). При смещении пружинного элемента 13 эта выступающая часть 30 испытает воздействие направленного вниз усилия, которое образуется при выталкивании вперед несущей площадки 4 в нижней ее точке.
Когда пользователь собирается применить данное устройство, узел 2, 4 иглы отводится в заднее положение (см. Фиг.10) путем оттягивания ручки 22 до тех пор, пока (1) выступ 23 на нижней стороне ручки не пройдет возвышение 24 внутри нижней части корпуса 1 или же (2) выступающая часть 30 направляющего средства 9d не выйдет за торец L-образного профиля направляющего средства 9b корпуса 1 или за вход в него. После этого пользователь помещает загнутые вверх части 10 возле кожи и спускает узел 2, 4 иглы.
Когда пользователь захочет выпустить узел 2, 4 иглы из отведенного назад положения, он может нажать одновременно в двух местах 7 нажатия, если узел иглы зафиксирован по механизму (1), или пользователь может нажать в точке 7а, если узел иглы зафиксирован по механизму (2). Предпочтительно места 7а нажатия должны быть указаны и на верхней, и на нижней стороне корпуса 1, чтобы пользователь мог приложить пальцами встречное усилие. При встречном нажатии в двух местах 7 диаметр корпуса в направлении, перпендикулярном прямой, соединяющей места нажатия, увеличивается, и поскольку направляющее средство 9d на верхней стороне несущей площадки 4 удерживается в направленном вниз L-образном профиле, выступ 23 приподнимается над возвышением 24 и выходит из зацепления с ним. Это приводит в действие пружинный элемент 13 и узел 2, 4 иглы с присоединенным к нему корпусом 3 датчика перемещается вперед в выдвинутое положение.
На Фиг.11 и 12 показан четвертый вариант осуществления с иным пружинным элементом 13. Пружинный элемент 13 в этом варианте осуществления выполнен из двух плоских пружин, каждая из которых имеет форму буквы «С», если пружинный элемент не смещен. Форма буквы «С» плоских пружин означает, что пружины содержат лишь одну выпуклую кривую, а то как пружинам придана форма и как они закреплены на каждом конце, 13а и 13b, кривой, зависит от материала и формы, выбранных для этих пружин. Плоские пружины 13 закреплены на нижней стенке корпуса 1 так, что задние концы 13а С-образных пружинных элементов 13 стационарны по отношению к корпусу 1. Передний конец 13b плоских пружин опирается о поверхность 4а узла 2, 4 иглы или крепится к узлу 2, 4 иглы. В этом варианте осуществления C-образные пружинные элементы 13 размещены между задним концом узла 2, 4 иглы и задним концом корпуса 1, и при оттягивании назад ручки 22 пружинные элементы 13 смещаются, при этом оба конца С-образных пружинных элементов, 13а и 13b, сдвигаются друг к другу. При срабатывании пусковой кнопки 7 пружинные элементы 13 возвращаются в несмещенное состояние и узел 2, 4 иглы выталкивается вперед.
На Фиг.12а показан вариант осуществления плоских пружин 13, где эти пружины закреплены на верхней стенке корпуса 1 так, что задние концы 13а С-образных пружинных элементов 13 с низкой степенью кривизны стационарны по отношению к корпусу 1. Передний конец 13b плоских пружин опирается о поверхность узла 2, 4 иглы или крепится к узлу 2, 4 иглы, однако в этом варианте осуществления передний конец 13b крепится к передней части узла 2, 4 иглы ниже уровня иглы.
Способ крепления плоских пружин к корпусу 1 на конце 13а зависит от материала, из которого выполнены пружины, т.к. это влияет на форму пружины, в особенности на ее толщину. Если плоские пружины выполнены из пластика, то материал в месте их крепления к корпусу 1 может принимать любую форму, если пружины изготовлены, например, путем формования. Если этот материал имеет достаточную толщину, то выступающая часть 25 плоской пружины может быть зажата в вырезе корпуса 1. Если же плоские пружины выполнены, например, из металла, то образовать выступающую часть 25 на плоской пружине будет делом более дорогостоящим, и в этом случае эффективнее сделать, например, трехстороннюю прямоугольную прорезь в плоской пружине, которая крепится к корпусу 1, и образовать выемку 26. Эта прорезь делает возможным отогнуть выемку 26 от плоскости пружины и опереть ее на корпус 1. Когда плоские пружины закреплены на корпусе 1 с помощью выступающей части 25 или с помощью выемки 26, то нет необходимости в дополнительном креплении пружин к корпусу, например, путем сварки, склеивания или иным подобным образом.
На Фиг.13 показан пятый вариант осуществления инструмента для введения, где пружинный элемент 13 образован кольцевой пружиной. Крайняя задняя часть 13а кольцевой пружины 13 стационарна по отношению к корпусу 1, а передняя часть 13b кольцевой пружины 13 прикреплена к узлу 2, 4 иглы либо к ручке 22 или же просто опирается на подвижный узел 2, 4 иглы или ручку 22 в состоянии незначительного смещения. Пружинный элемент 13 может быть выполнен с удлиненной частью 13с, расположенной вдоль нижней стенки корпуса 1. Такая удлиненная часть 13с может быть закреплена в любом месте по ее длине, но предпочтительно - в позиции р1 рядом с передней стороной корпуса 1.
На Фиг.13А показан вариант осуществления, где крайняя задняя часть 13а узла 13 кольцевой пружины опирается на верхнюю часть (выше уровня иглы) корпуса 1, а передняя часть 13b кольцевой пружины 13 крепится к ручке 22 путем простого упора специально образованной части в ручку 22 в состоянии незначительного смещения.
На Фиг.14 показан шестой вариант осуществления с пружинным элементом 13, выполненным в форме буквы «S» и образованным плоской пружиной, выполненной из металла или пластика. Передняя часть 13b S-образной пружины закреплена на поверхности 4а узла иглы или опирается на нее, предпочтительно в состоянии незначительного смещения, когда узел 2, 4 иглы находится в крайнем переднем своем положении; задний конец S-образной пружины закреплен на нижней части корпуса 1. Предпочтительно задний конец крепится к корпусу с помощью удлиненной части 13с, которая может быть расположена на дорожке, образованной двумя противоположными вертикальными L-образными профилями, обращенными внутрь, причем часть 13с закреплена на заднем своем конце, например, с помощью выступающей части 25 пружинного элемента 13, которая вдавлена в вырез корпуса 1, а спереди - с помощью трехсторонней прямоугольной прорези 26 в удлиненной части, образующей выемку, способную захватить передний край корпуса 1. Когда ручка и узел иглы оттягиваются назад, оба конца буквы «S» сжимаются между собой, смещая пружину, и когда срабатывает пусковая кнопка, пружина выталкивает узел 2, 4 иглы вперед.
Пружинный элемент 13 по шестому варианту осуществления может также быть выполнен в форме цифры «8», может содержать больше кривых, чем обычная буква «S», и больше колец, чем цифра «8».
На Фиг.15 показан седьмой вариант осуществления инструмента для введения, где пружинный элемент 13 образован цилиндрической винтовой пружиной. Крайняя задняя часть 13а цилиндрической винтовой пружины 13 стационарна по отношению к корпусу 1, а передняя часть 13b цилиндрической винтовой пружины 13 прикреплена к узлу 2, 4 иглы либо к ручке 22 или же просто опирается на часть подвижного узла иглы или ручку в состоянии незначительного смещения. Пружинный элемент 13 может быть частично помещен на дорожке, расположенной вдоль нижней стенки корпуса 1. Такая дорожка предпочтительно выполнена из того же материала, что и корпус 1. Дорожка может состоять из двух стенок, стоящих вертикально на нижней стенке корпуса 1, эти стенки могут быть параллельны, закруглены внутрь или наклонены друг к другу. Часть узла 2, 4 иглы выполнена в виде выступа вниз, причем эта часть выступает вниз до дорожки и скользит по дорожке. Передний конец 13b пружинного элемента 13 крепится к этой части или опирается на нее. Когда ручка 22 отводится в заднее положение, эта часть обеспечивает смещение пружинного узла 13 по дорожке путем проталкивания подвижного конца 13b пружинного элемента 13 в направлении стационарного конца 13а.
На Фиг.16 показан восьмой вариант осуществления инструмента для введения, где пружинный элемент 13 представляет собой кольцевую или прямоугольную пластинчатую пружину. Задняя часть 13а этой плоской пружины 13 стационарна по отношению к корпусу 1, при этом задняя часть 13а крепится к части верхней стенки части корпуса 1 или опирается на нее. Передняя часть 13b закреплена на нижней стороне узла 2, 4 иглы, например в позиции р2 (см. Фиг.9а и 9b).
На Фиг.17 показан девятый вариант осуществления инструмента для введения, где пружинный элемент 13 закреплен на противоположных стенках корпуса 1. На Фиг.17 передние концы 13b пружинного элемента 13 крепятся к боковым стенкам корпуса 1, а крайняя задняя часть 13а пружинного элемента 13 крепится к подвижному узлу 2, 4 иглы, или опирается на него, в позиции р3. В этом варианте осуществления пружинный элемент 13 образует петлю вокруг нижней части узла 2, 4 иглы и фактически не соприкасается с точкой р3, когда пружинный элемент пребывает в несмещенном состоянии. Когда ручка 22 оттягивается назад, смещая пружинный элемент 13, петля деформируется и затягивается вокруг нижней части узла 2, 4 иглы, и при срабатывании пусковой кнопки узел 2, 4 иглы под действием пружинного элемента 13 перемещается вперед, т.к. петля возвращается в свою исходную форму. Предпочтительно этот вариант осуществления выполнить из металлической проволоки или иного материала со схожими характеристиками.
Существует возможность также конструктивно выполнить пружинный элемент 13 из плоской пружины, где крайняя передняя часть этой пружины упирается в точку р3, как обозначено на Фигурах С и D тонкой линией, а крайняя задняя ее часть закреплена на боковых стенках корпуса 1в задней части боковых стенок. В этом случае плоская пружина может быть выполнена из металла или пластика.
На Фиг.18 показан инструмент для введения с часовой пружиной 13, где один конец 13а пружины зафиксирован на нижней части узла 2, 4 иглы, а другой конец 13b фиксируется на крюке или ином схожем приспособлении на передней части корпуса 1. При отводе назад узла 2, 4 иглы часовая пружина раскручивается, а при срабатывании удерживающего элемента эта пружина скручивается и перемещается вперед, что приводит к прокалыванию кожи иглой с датчиком под требуемым углом и введению их на требуемое расстояние в подкожный слой.
Пружина, работающая на растяжение, может стать пружиной, работающей на сжатие путем перевода обоих концов проволоки пружины через центр проволочной спирали на противоположный конец пружины. При натяжении концов проволоки пружина сжимается.
На Фиг.19 и 20 показан одиннадцатый вариант осуществления, где пружинный элемент 13 выполнен из двух плоских пружин, каждая из которых имеет слабовыраженный S-образный изгиб. Выполнение пружин в форме буквы «S» означает, что они содержат две выпуклые кривые. Плоские пружины 13 закреплены на верхней стенке корпуса 1 так, что задние концы 13а S-образных пружинных элементов 13 стационарны по отношению к корпусу 1. Передние концы 13b плоских пружин крепятся к узлу 2, 4 иглы. В этом варианте осуществления S-образные пружинные элементы 13 размещены между передним концом узла 2, 4 иглы и задним концом корпуса, и при оттягивании назад ручки 22 пружинные элементы 13 смещаются, при этом концы S-образных пружинных элементов 13а и 13b сдвигаются навстречу друг другу. При срабатывании пусковой кнопки 7 пружинные элементы 13 возвращаются в несмещенное положение и узел 2, 4 иглы выталкивается вперед.
В большинстве вариантов осуществления пружинного элемента, показанных здесь, пружины работают на сжатие за исключением третьего варианта осуществления, где пружинный элемент образован упругой пружиной в форме буквы «О», и десятого варианта осуществления с пружинным элементом, образованным плоской спиральной пружиной; эти элементы представляют собой пружины, работающие на растяжение. В девятом варианте осуществления пружинного элемента, образованного витком, пружина работает и на сжатие, и на растяжение.
Пружинные элементы могут быть выполнены, например, из стали или пластика. Пружинные элементы из пластика предпочтительно могут быть выполнены из РОМ (полиоксиметилена), а корпус, жесткая крышка и несущая площадка - предпочтительно из РР (полипропилена). Если пружинный элемент и несущая площадка отформованы совместно как единый блок, то предпочтителен РОМ.
В настоящем описании выражение «плоская пружина» содержит в себе понятие «пластинчатая пружина».
Вместо пружинного элемента 13 для вывода узла 2, 4 иглы из отведенного назад положения в переднее положение можно использовать магниты. При использовании магнитов следует выбрать магниты с отталкивающим действием, обладающие соответствующей силой отталкивания для перемещения узла 2, 4 иглы из отведенного назад положения в переднее положение. Один магнит помещают в корпус 1, а второй магнит помещают у узла 2, 4 иглы, несущего инфузионное устройство. При срабатывании пусковой кнопки узел 2, 4 иглы освобождается и под действием отталкивания магнитов перемещается вперед. Для предохранения и укрытия магнитов они могут быть отформованы соответственно в корпусе и узле иглы. Кроме того, магниты с отталкивающим действием должны иметь разные размеры для того, чтобы избежать изменения магнитного поля.
На Фиг.21а-21с показан чрескожный датчик, известный из патента US 5.954.643, этот чрескожный датчик подготовлен для введения вручную. Ссылочные позиции и названия различных частей на Фиг.21а-21с и в соответствующем описании идентичны позициям и названиям в оригинале патента US 5.954.643.
Чрескожный датчик содержит три раздельных части: кабельный соединитель 20', монтажное основание 30' и втулку 80'. Монтажное основание 30' имеет в общем плоскую нижнюю поверхность, закрепленную на клейкой накладке 34'. Кабельный соединитель 20' определяет границы раструбного фитинга 92' для введения в зацепление со скользящей посадкой задней кабельной заделки монтажного основания 30'. Этот раструбный фитинг 92' имеет цилиндрический входной участок 93', который совпадает с в общем D-образным или полукруглым ступенчатым участком 94', размеры которого позволяют ввести D-образный клин 50' задней кабельной заделки. Раструбный фитинг 92' включает в себя множество проводящих контактов 96', расположенных на ступенчатом участке 94', для электрического соединения с контактной площадкой проксимального концевого сегмента датчика 12', когда монтажное основание 30' и кабельный соединитель 20' соединены между собой, как показано на Фиг.21b. В сборке уплотняющие кольца 48' обеспечивают герметичное соединение между входным участком 93' раструбного фитинга 92' и задней кабельной заделкой монтажного основания 30'. D-образная геометрия компонентов 50' и 94' внутри фитинга обеспечивает однонаправленное соединение для правильной кондуктивной связи кабеля 22' с датчиком 12'. Монтажное основание 30' и кабельный соединитель 20' удерживаются в соединении между собой с возможностью разъема с помощью входящих в зацепление замковых стопорных элементов. Монтажное основание 30' включает в себя пару лап 97' для захвата с односторонней заделкой, выступающих назад, которые на задних своих концах имеют соответствующие подрезанные концевые элементы 98' для захвата. Лапы 97'для захвата обладают достаточной и естественной упругостью для перемещения по отношению к остальной части монтажного основания 30', чтобы позволить сжать лапы 97' для захвата внутрь навстречу друг другу. Такое перемещение в разрешенном диапазоне обеспечивает вхождение с зацеплением концевых элементов 98' для захвата в соответствующую пару гнезд 100' для захвата, образованных в кабельном соединителе 20' с противоположных сторон от раструбного фитинга 92', где гнезда 100' для захвата имеют по своим границам запорные элементы 102' для зацепления с упомянутыми концевыми элементами 98' для захвата. При желании, эти составные части могут быть отсоединены друг от друга путем ручного сжатия лап 97' для захвата внутрь навстречу друг другу для выхода из зацепления с элементами 102' для захвата при отделении в осевом направлении монтажного основания 30' от кабельного соединителя 20'.
В этом варианте осуществления датчик 12' представляет собой гибкий тонкопленочный датчик, содержащий сравнительно тонкий удлиненный элемент, который может быть выполнен по технологии так называемой тонкопленочной маски, чтобы включить в себя удлиненные проводящие элементы. Проксимальный концевой сегмент тонкопленочного датчика 12' расположен в канале монтажного основания 30', дистальный концевой сегмент тонкопленочного датчика 12' расположен вдоль иглы 14' для введения. Канюля 58' плотно прилегает с возможностью скольжения, по меньшей мере, к некоторому участку проксимального концевого сегмента датчика 12' и выступает также за дистальный концевой сегмент, чтобы заключить в оболочку и предохранить датчик. В одном варианте осуществления канюля выполнена из пластика с малым весом, такого как пластик на основе уретана, и имеет форму с двумя просветами, как показано на Фиг.12с. Канюля 58' с двумя просветами особенно удобна для соединения или разъединения с иглой 14' для введения по механизму скользящей посадки.
Втулка 80' включает в себя увеличенное в размере крыло 82' в виде лепестка, выполненное с возможностью легко осуществимого зажатия между большим и указательным пальцами руки и манипулирования. Это увеличенное в размере крыло 82' выступает вверх из раздвоенной носовой части 84', размер и форма которой обеспечивают ее посадку на верхнюю поверхность 40' монтажного основания.
Сигналы с датчика 12' через электрический кабель 22' поступают на соответствующее контрольно-измерительное устройство или регистрирующее устройство.
На Фиг.22-27 показан инструмент для введения по настоящему изобретению, приспособленный к чрескожному датчику с монтажным основанием, соответствующим варианту осуществления на Фиг.21.
В варианте осуществления на Фиг.22-24 несущая площадка 4 выполнена с возможностью нести корпус 3 датчика, где нижняя поверхность корпуса 3 датчика, т.е. поверхность, ближайшая к пациенту при использовании устройства, располагается под углом к прямой, образуемой иглой 6 для введения с присоединенной сенсорной частью 5. Несущая площадка 4 приспособлена нести корпус 3 датчика по этому варианту осуществления путем образования части 4а с наклонной поверхностью, при этом часть 4а поверхности поддерживает корпус 3 датчика в процессе введения и обеспечивает правильное позиционирование выступающей вбок иглы 6 для введения, а также наклонной нижней поверхности корпуса 3 датчика.
В вариантах осуществления на Фиг.22-24 расстояние между загнутыми вверх частями 10 достаточно для прохождения между ними выполненного с наклоном корпуса датчика.
На Фиг.25 показана несущая площадка 4 в сочетании с пружинным элементом. Пружинный элемент по этому варианту осуществления выполнен из пластика и содержит пружинную функциональную часть 13, вспомогательное средство крепления, стопорные части для вспомогательного средства крепления, а также задний упор для вспомогательного средства крепления. Пружинная функциональная часть 13 содержит две плоские пружины, расположенные на противоположных сторонах несущей площадки 4, при этом пружинная функциональная часть 13 с ее задним элементом 13а и передним элементом 13b образует замкнутое кольцо, что делает ее сильной и удобной в обращении. Когда пружинные функциональные части 13 смещены и задний элемент 13а приближен к переднему элементы 13b, пружинные функциональные части 13, которые показаны здесь в несмещенной форме, изгибаются и образуют S-образную или С-образную кривую. В этом варианте осуществления пружинный элемент крепится к корпусу 1 инструмента для введения при помощи вспомогательного средства крепления, расположенного вдоль внутренней верхней стенки инструмента для введения.
Пружинные элементы такого типа, как показано на Фиг.25, могут быть выполнены, например, из стали и пластика. Пружинные элементы из пластика могут быть выполнены, например, из РОМ (полиоксиметилена), а корпус 1, жесткая крышка 20 и несущая площадка 4 могут быть выполнены, например, из РР (полипропилена).
Если пружинный элемент и несущая площадка отформованы совместно как единый блок, то может быть использован такой материал, как РОМ.
Вместо пружинного элемента для перемещения корпуса 3 датчика из отведенного назад положения в переднее положение можно использовать магниты. При использовании магнитов следует выбрать магниты с отталкивающим действием, обладающие соответствующей силой отталкивания для перемещения корпуса 3 датчика из отведенного назад положения в переднее положение. Один магнит помещают в корпус 1, а второй магнит помещают у площадки 4, несущей корпус 3 датчика. При срабатывании пусковой кнопки несущая площадка 4 освобождается и под действием отталкивания магнитов перемещается вперед. Для предохранения и укрытия магнитов они могут быть отформованы соответственно в корпусе 1 и несущей площадке 4. Кроме того, магниты с отталкивающим действием должны иметь разные размеры для того, чтобы избежать изменения магнитного поля.
На Фиг.26 показан инструмент для введения после его использования. На этом этапе пользователь уже ввел корпус 3 датчика с помощью инструмента для введения и вынул инструмент для введения и вместе с ним иглу 6 для введения из корпуса 3 датчика. Игла 6 для введения после ее использования находится в переднем положении, и чтобы использованная игла не представляла опасности, пользователь возвращает на место жесткую крышку 20.
На Фиг.27 показан вариант осуществления иглы 6 для введения в сочетании с сенсорной частью 5.
Реферат
Изобретение относится к медицинской технике, а именно к инструменту для введения чрескожного датчика, который содержит чувствительную часть, например, для регистрации содержания глюкозы в крови. Инструмент для введения чрескожного датчика содержит корпус, корпус датчика, втулку иглы, пружинный элемент и несущую площадку. Корпус снабжен направляющим средством на своей внутренней поверхности для направленного перемещения несущей площадки. Корпус датчика содержит чувствительную часть, вводимую под кожу. Втулка иглы содержит иглу для введения для прокалывания кожи. Корпус датчика и втулка иглы разъемным образом соединены между собой и в их соединенном состоянии игла для введения примыкает к чувствительной части. Несущая площадка снабжена направляющим средством на своей наружной поверхности, которое обеспечивает направленное перемещение относительно корпуса между втянутым и выдвинутым положениями. Пружинный элемент соединен с пусковым средством. При срабатывании пускового средства корпус датчика, втулка иглы и несущая площадка под воздействием пружинного элемента переходят в выдвинутое положение, в котором игла и чувствительная часть могут быть введены под кожу. Втулка иглы и несущая площадка снабжены неразъемным средством фиксации. Игла для введения, по меньшей мере частично, окружает чувствительную часть, помещаемую под кожу. Введенный датчик вышеуказанного инструмента для введения может регистрировать глюкозу в крови пациента. Во втором варианте выполнения инструмента для введения чрескожного датчика втулка иглы и несущая площадка снабжены неразъемным средством фиксации. Нижнее основание к
Формула
- корпус (1) снабжен направляющим средством (9a, 9b, 9c) на своей внутренней поверхности для направленного перемещения несущей площадки (4),
- корпус (3) датчика содержит чувствительную часть (5), вводимую под кожу,
- втулка (2) иглы содержит иглу (6) для введения для прокалывания кожи,
- корпус (3) датчика и втулка (2) иглы разъемным образом соединены между собой и в их соединенном состоянии игла (6) для введения примыкает к чувствительной части (5),
- несущая площадка (4) снабжена направляющим средством (9е, 9d, 9f) на своей наружной поверхности, которое обеспечивает направленное перемещение относительно корпуса (1) между втянутым и выдвинутым положениями,
- пружинный элемент (13) соединен с пусковым средством (7), причем при срабатывании пускового средства (7) корпус (3) датчика, втулка (2) иглы и несущая площадка (4) под воздействием пружинного элемента переходят в выдвинутое положение, в котором игла (6) и чувствительная часть (5) могут быть введены под кожу; втулка (2) иглы и несущая площадка (4) снабжены неразъемным средством фиксации, отличающийся тем, что игла (6) для введения, по меньшей мере, частично окружает чувствительную часть (5), помещаемую под кожу.
- корпус (1) снабжен направляющим средством (9a, 9b, 9c) на своей внутренней поверхности для направленного перемещения несущей площадки (4),
- корпус (3) датчика содержит чувствительную часть (5), вводимую под кожу,
- втулка (2) иглы содержит иглу (6) для введения для прокалывания кожи,
- корпус (3) датчика и втулка (2) иглы разъемным образом соединены между собой и в их соединенном состоянии игла (6) для введения примыкает к чувствительной части (5),
- несущая площадка (4) снабжена направляющим средством (9e, 9d, 9f) на своей наружной поверхности, которое обеспечивает направленное перемещение относительно корпуса (1) между втянутым и выдвинутым положениями,
- пружинный элемент (13) соединен с пусковым средством (7), причем при срабатывании пускового средства (7) корпус (3) датчика, втулка (2) иглы и несущая площадка (4) под воздействием пружинного элемента переходят в выдвинутое положение, в котором игла (6) и чувствительная часть (5) могут быть введены под кожу;
- втулка (2) иглы и несущая площадка (4) снабжены неразъемным средством фиксации,
- нижнее основание корпуса (1) выполнено с выступающей частью (10) и характеризуется тем, что выступающая часть (10) образует угол с иглой (6) для введения в продольном направлении, задавая пользователю нужный угол при введении.
Комментарии