Скважинный прибор гравитационной разведки и способ гравитационной разведки скважины - RU2178575C2
Код документа: RU2178575C2
Чертежи
Описание
Изобретение относится к скважинному прибору гравитационной разведки и способу гравитационной разведки скважины.
Разведка на нефть включает в себя оценку нефтеносных пластов для определения движения или отсутствия нефти, газа или воды по мере добычи пластовых текучих сред. Наличие представления о движении газа в пласте имеет важное значение для предупреждения преждевременного прорыва рабочего агента и оптимизации отдачи пласта. Следить за движением газа в пласте можно при помощи способов гравитационной разведки, которые дают возможность измерять силу тяжести в скважине и на поверхности пласта. Данные о силе тяжести в скважине позволяют картировать вертикальное распределение нефти и газа в скважине, а на основании поверхностной силы тяжести можно судить о поверхностном распределении газа.
Обычно скважинная гравитационная разведка состоит в измерении местных значений силы тяжести Земли в ряде сечений скважины. Разница в силе тяжести (Δg) и вертикальное расстояние (Δz) между двумя последовательными сечениями дают информацию, достаточную для определения объемной плотности слоев породы, прилегающей к скважине. Объемная плотность породы и есть то, что отображается для нахождения вертикального распределения нефти и газа по мере добычи пластовой жидкости.
Плотность породы ρ, определяется выражением
ρ = (F-Δg/Δz)/(4πG),
где Δg/Δz - вертикальный градиент силы тяжести между двумя разнесенными по вертикали сечениями, F - сила тяжести в свободном воздухе и G - универсальная гравитационная
постоянная. Сила тяжести в свободном воздухе определяется при скважинной гравитационной разведке обычным способом, так что единственной неизвестной остается плотность породы ρ.
Чем
дальше отстоят друг от друга сечения, в которых проводятся замеры, тем глубже исследуемая зона. Интервал в 1,5 м (5 футов) дает исследуемую зону с радиусом 0-7,6 м (0-25 футов) от оси скважины. Чем
глубже зона исследования, тем лучше определяется истинная граница раздела газ-нефть, поскольку ослабляются эффекты, обусловленные скважиной, такие как локализованный газовый конус, буровой раствор и
обсадная колонна.
Данные гравиметрии обычно регистрируются в микрогалах (10-6 см/с2) или наногалах, что позволяет получать из них указания на непробитые карманы нефти или газа в пластах, соседствующих со скважиной. Для достижения такого уровня разрешения при измерениях гравитации требуются высокоточный гравиметрический датчик и тщательно разработанная методика измерений. Например, гравиметрический датчик должен быть ориентирован таким образом, чтобы ось чувствительности датчика была ориентирована вертикально. Отклонение оси чувствительности датчика от вертикали на угол α приводит к ошибке g•(1-cosα), где g - ускорение свободного падения. Таким образом, отклонение от вертикали на угол α, равный 45 мкрад (или 0, 00258o), приводит к ошибке около 1 микрогала.
Помимо обеспечения вертикальной ориентации оси чувствительности гравиметрического датчика при проведении гравитационных измерений для получения значений плотности с точностью до 0,01 г/см3 требуется также определение глубины сечений с точностью до 1 мм.
В соответствии с одним из аспектов изобретения скважинный прибор гравитационной разведки представляет собой удлиненный полый сосуд. Внутри сосуда помещается корпус датчика. Внутри корпуса датчика установлен универсальный шарнир, установленный с возможностью вращения на валу, причем ось вращения вала шарнира расположена под углом к продольной оси сосуда. Гравиметрический датчик, измеряющий силу тяжести, установлен внутри универсального шарнира. Первое приводное средство вращает шарнир относительно оси вращения вала шарнира, а второе приводное средство вращает шарнир относительно продольной оси сосуда. Датчик угла наклона определяет наклон сосуда относительно вертикали. Первое и второе приводные средства управляются регулятором в зависимости от сигналов, поступающих от датчика.
Далее изобретение
будет описано со ссылками на чертежи, на которых:
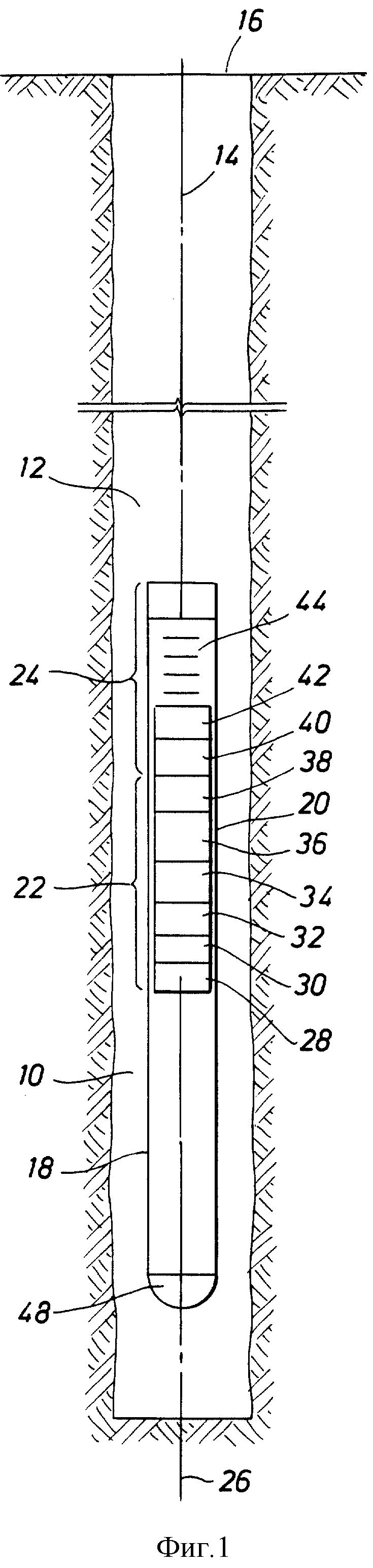
фиг. 1 схематически изображает зонд в скважине;
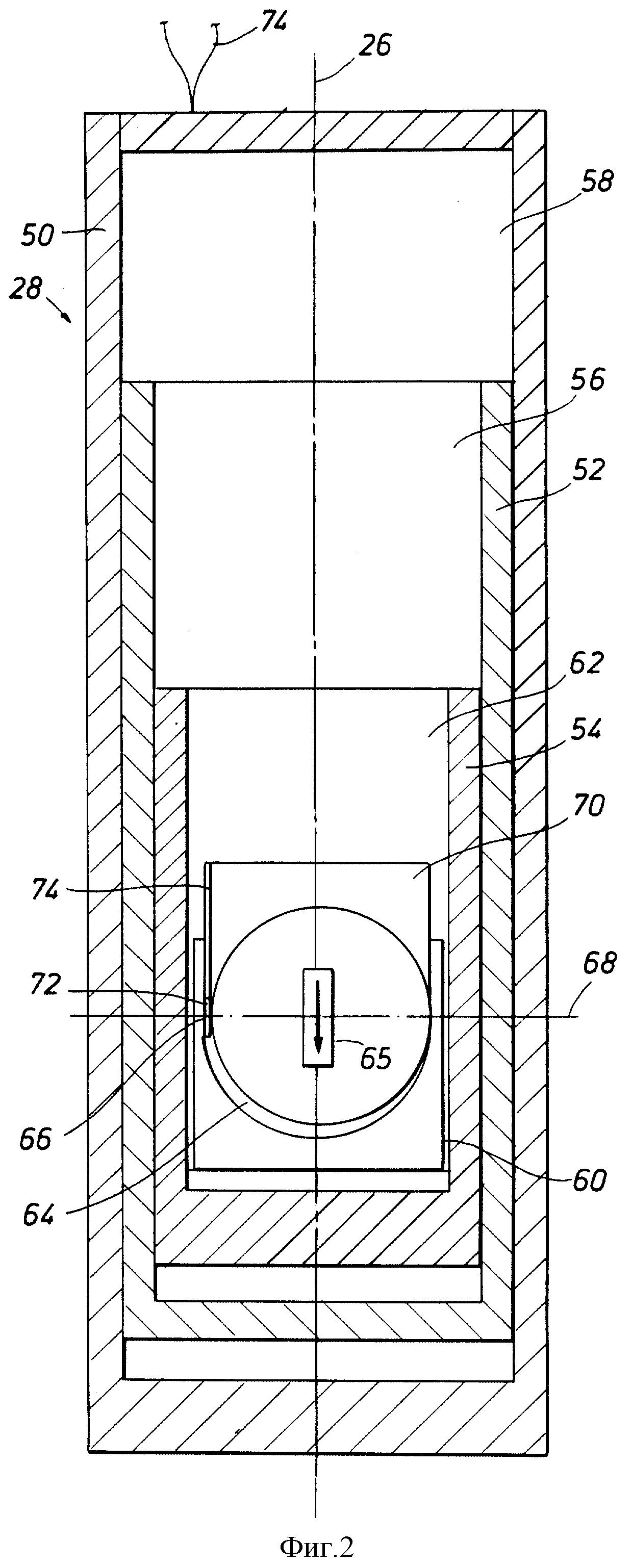
фиг. 2 представляет принципиальную схему гравиметра;
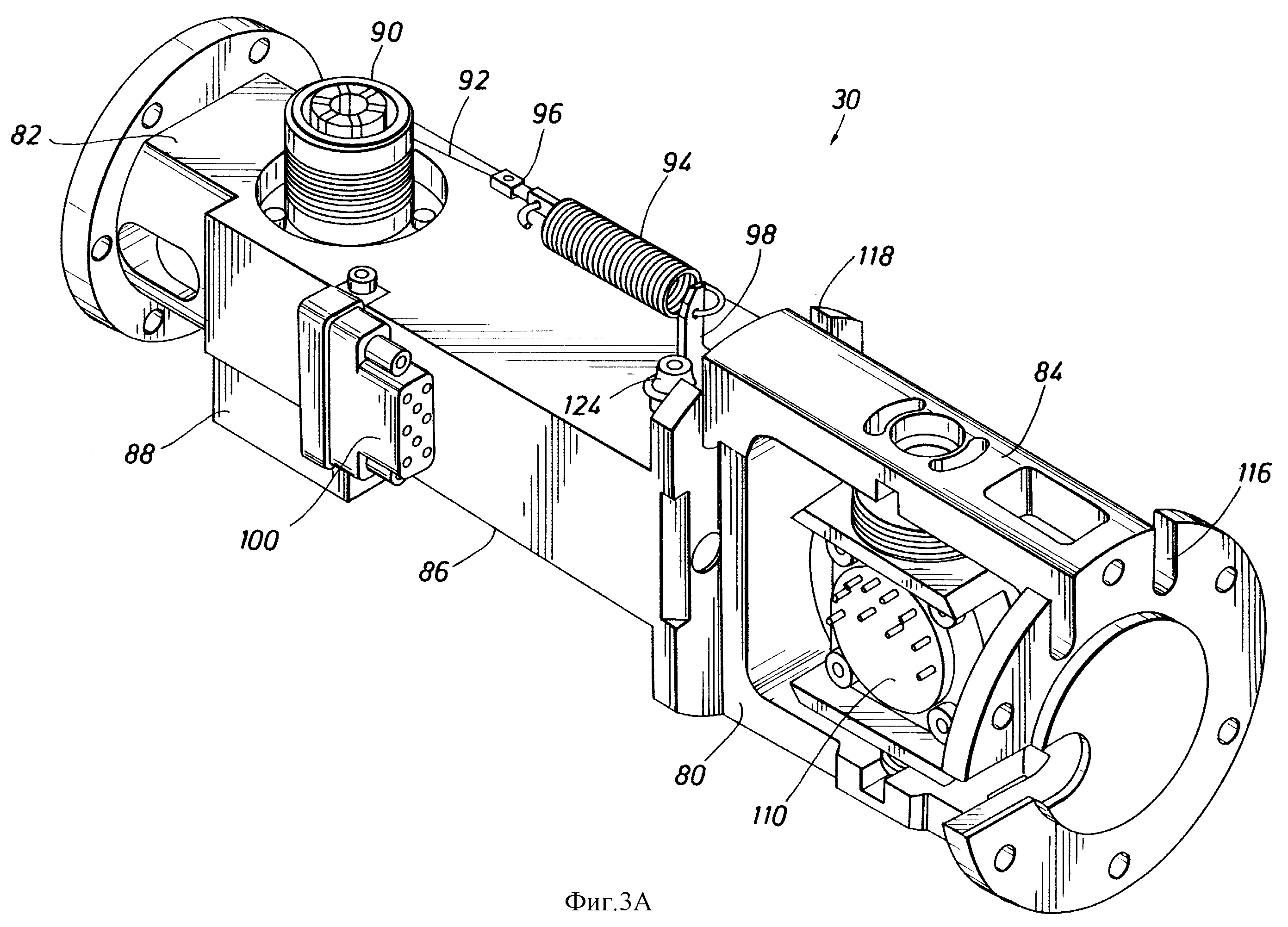
фиг. 3А
- перспективное изображение универсального шарнира с приводными средствами;
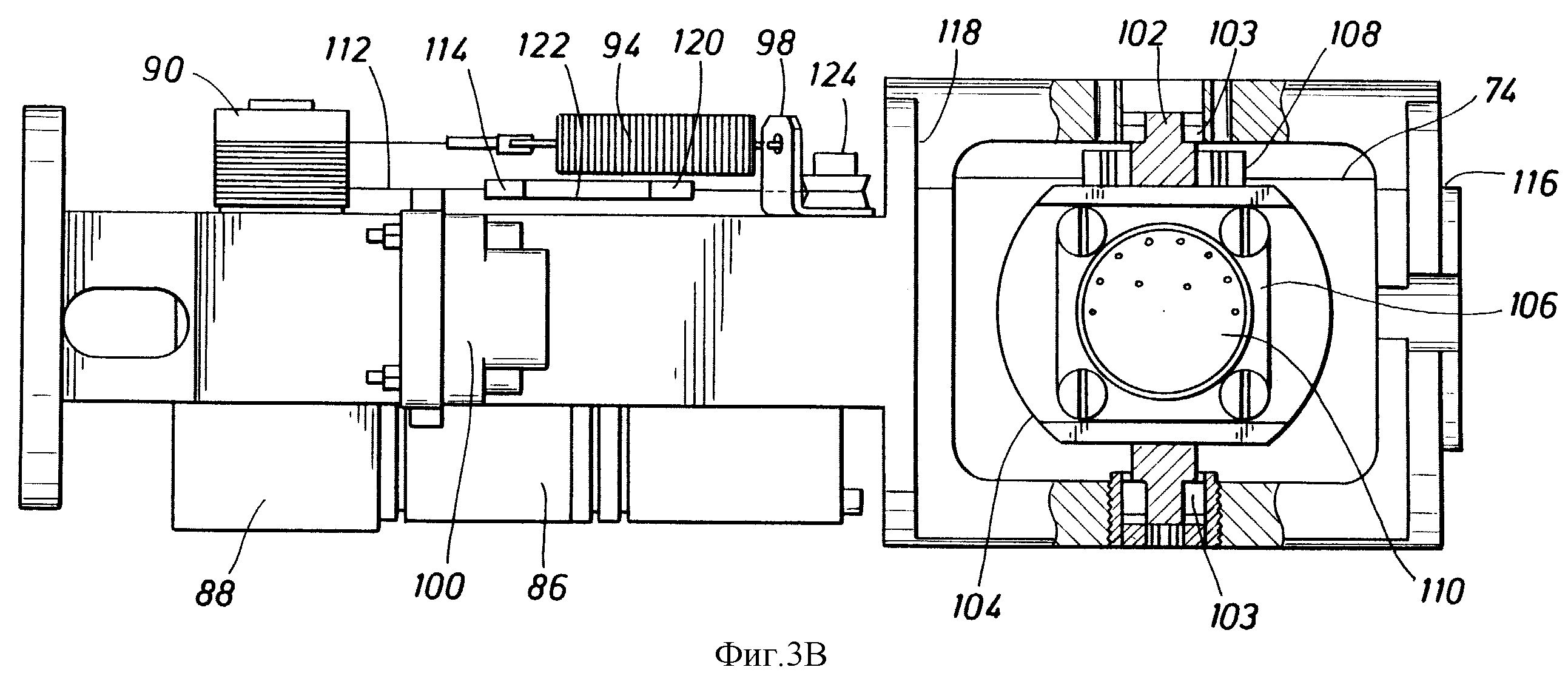
фиг. 3В - вид сбоку конструкции, представленной на фиг. 3А;
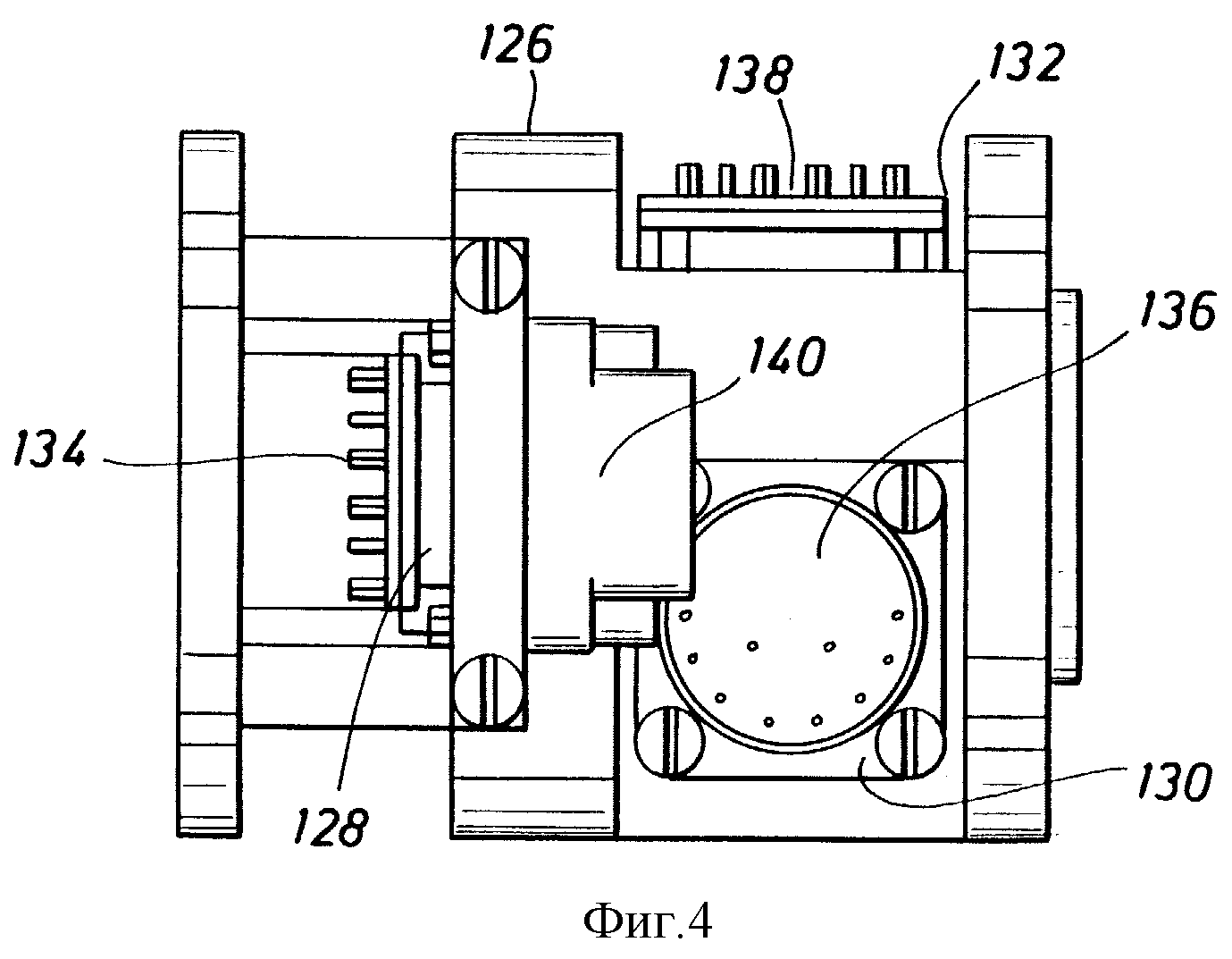
фиг. 4 - вид сбоку блока акселерометров в
сборе;
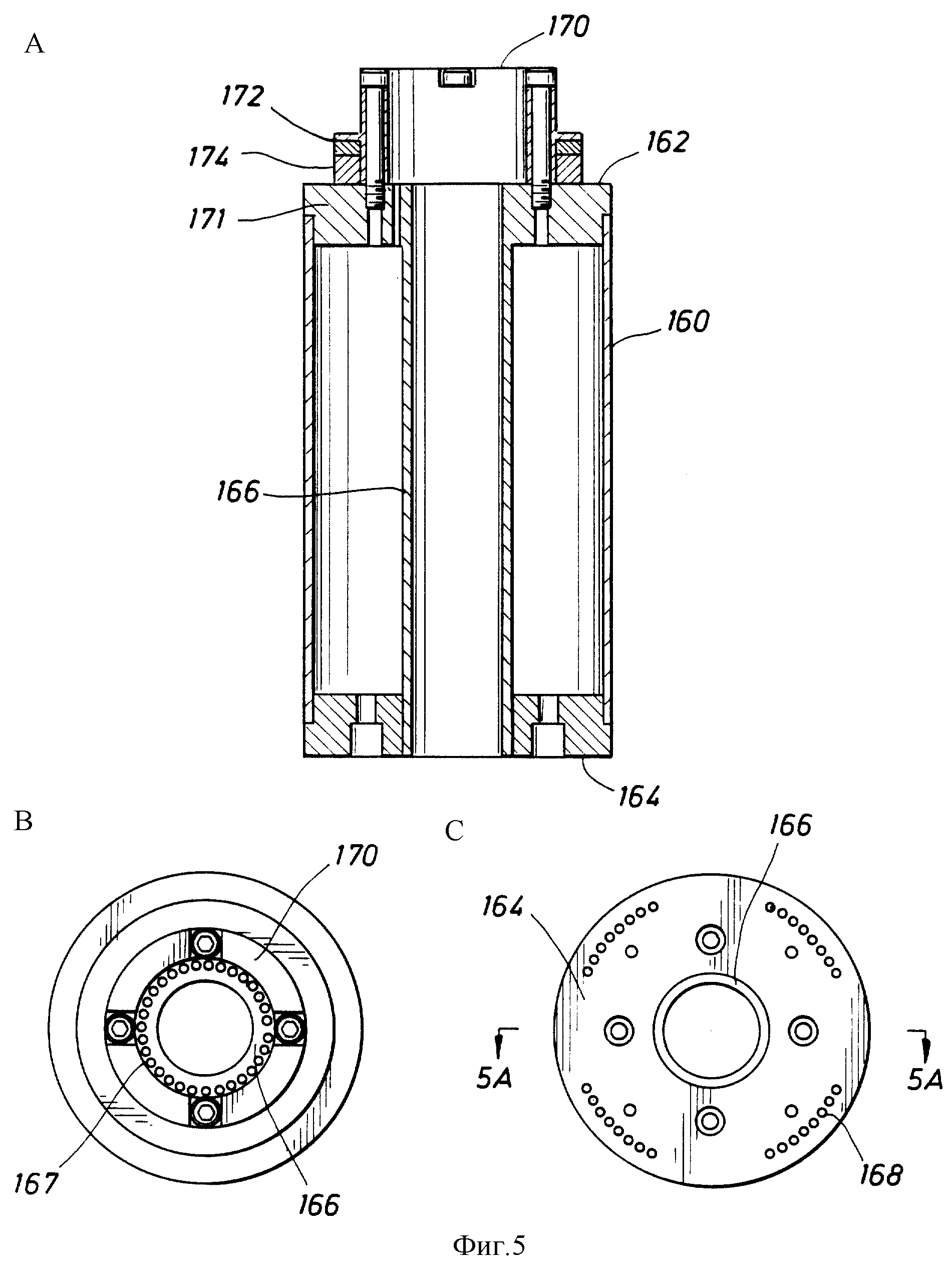
фиг. 5А - поперечное сечение узла на фиг. 5С по линии А-А;
фиг. 5В - вид сверху узла токосъемного кольца, показанного на фиг. 5А;
фиг. 5С - вид снизу узла
токосъемного кольца, показанного на фиг. 5А;
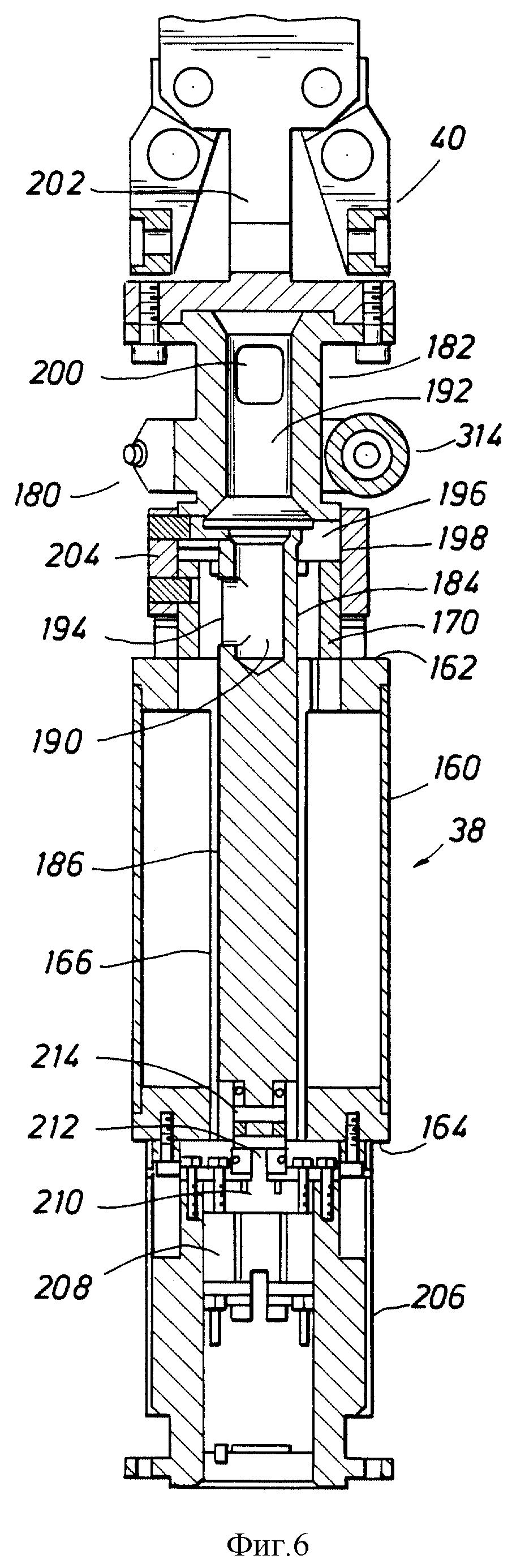
фиг. 6 - поперечное сечение части прибора, согласно изобретению, показывающее соединения между приводом вращения относительно продольной оси,
узлом токосъемного кольца и подъемным механизмом;
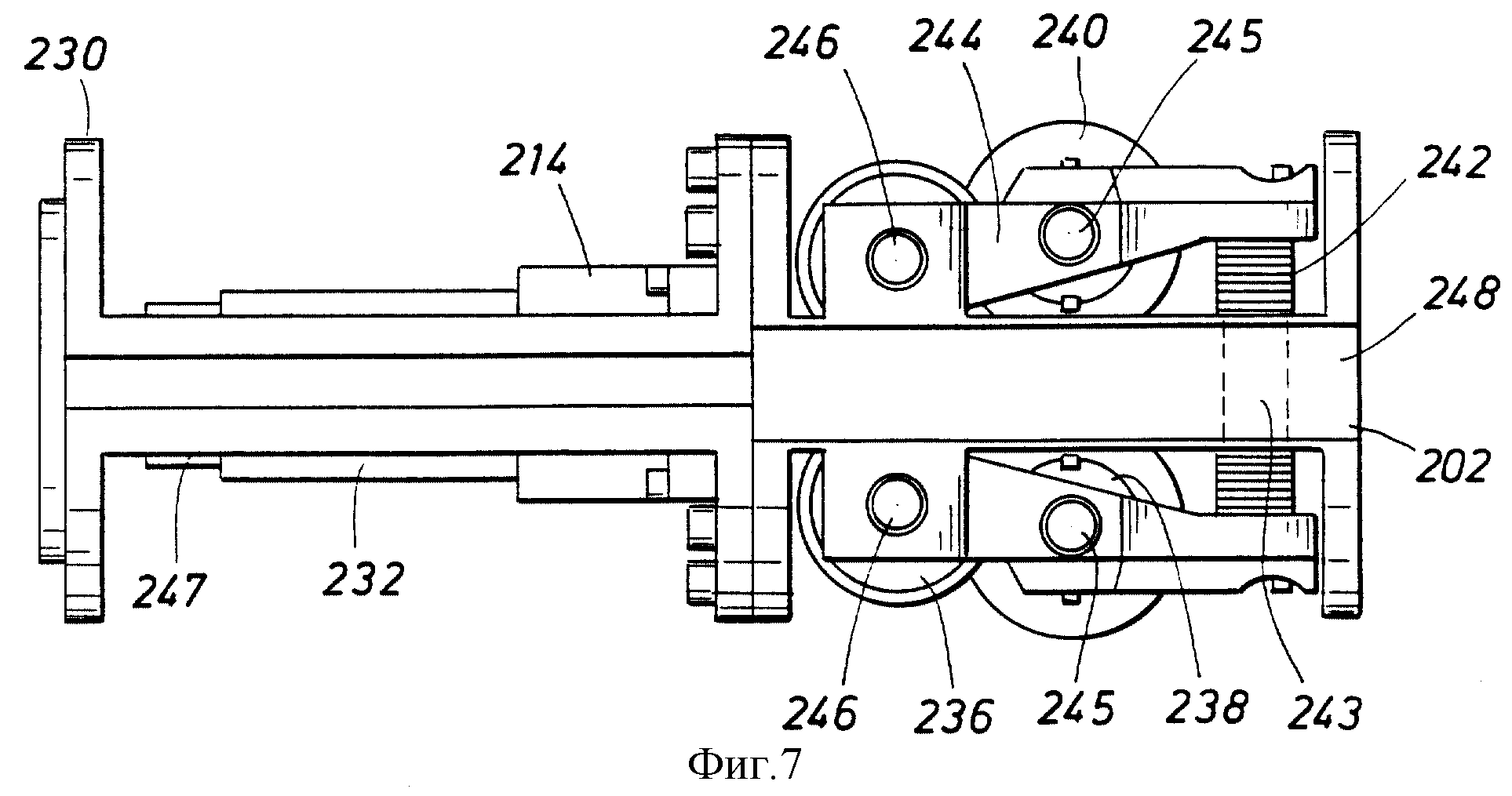
фиг. 7 - вид подъемного механизма сбоку;
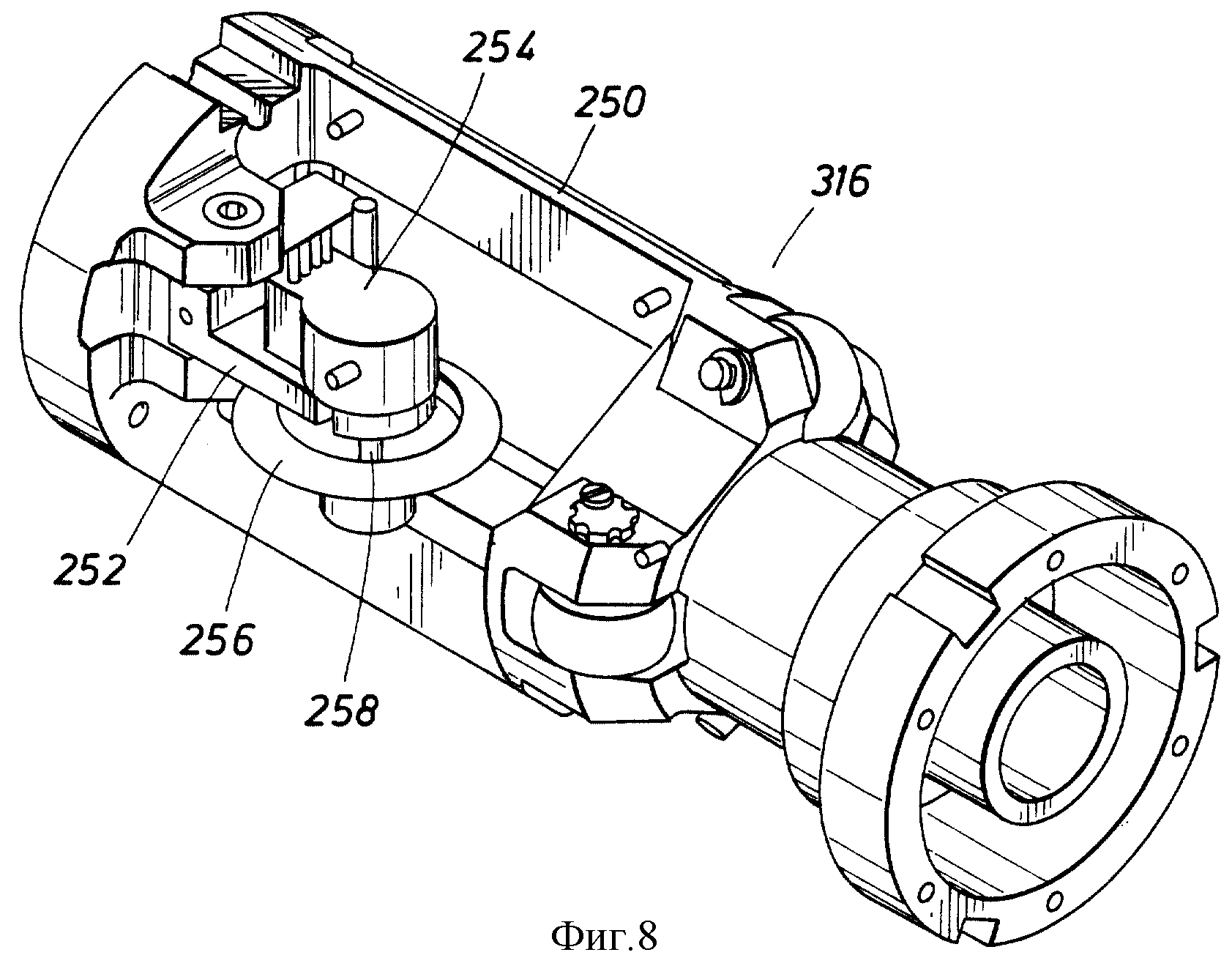
фиг. 8 - изометрическое изображение узла оптического шифратора;
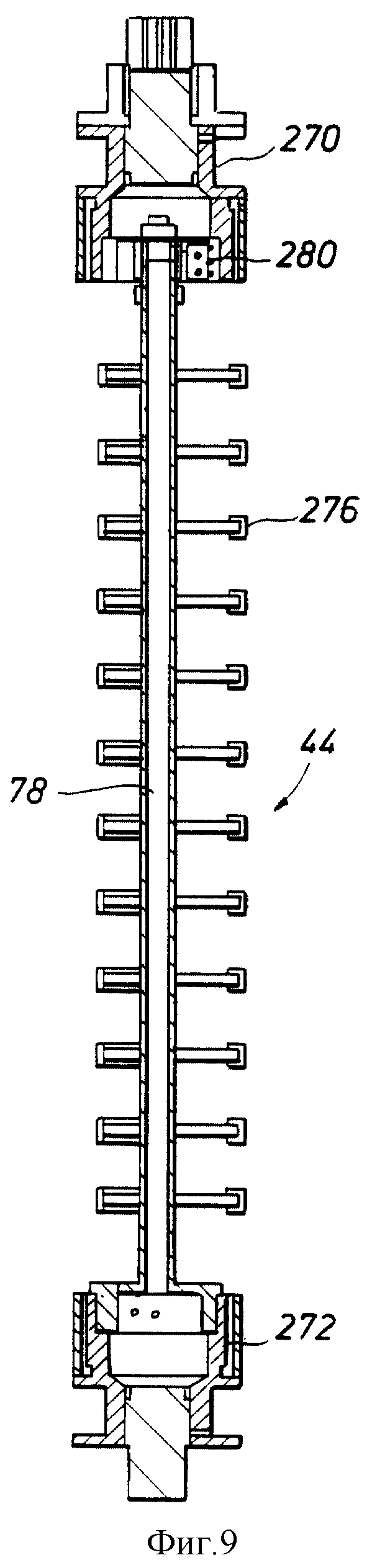
фиг. 9
- поперечное сечение кабельного подпружиненного узла;
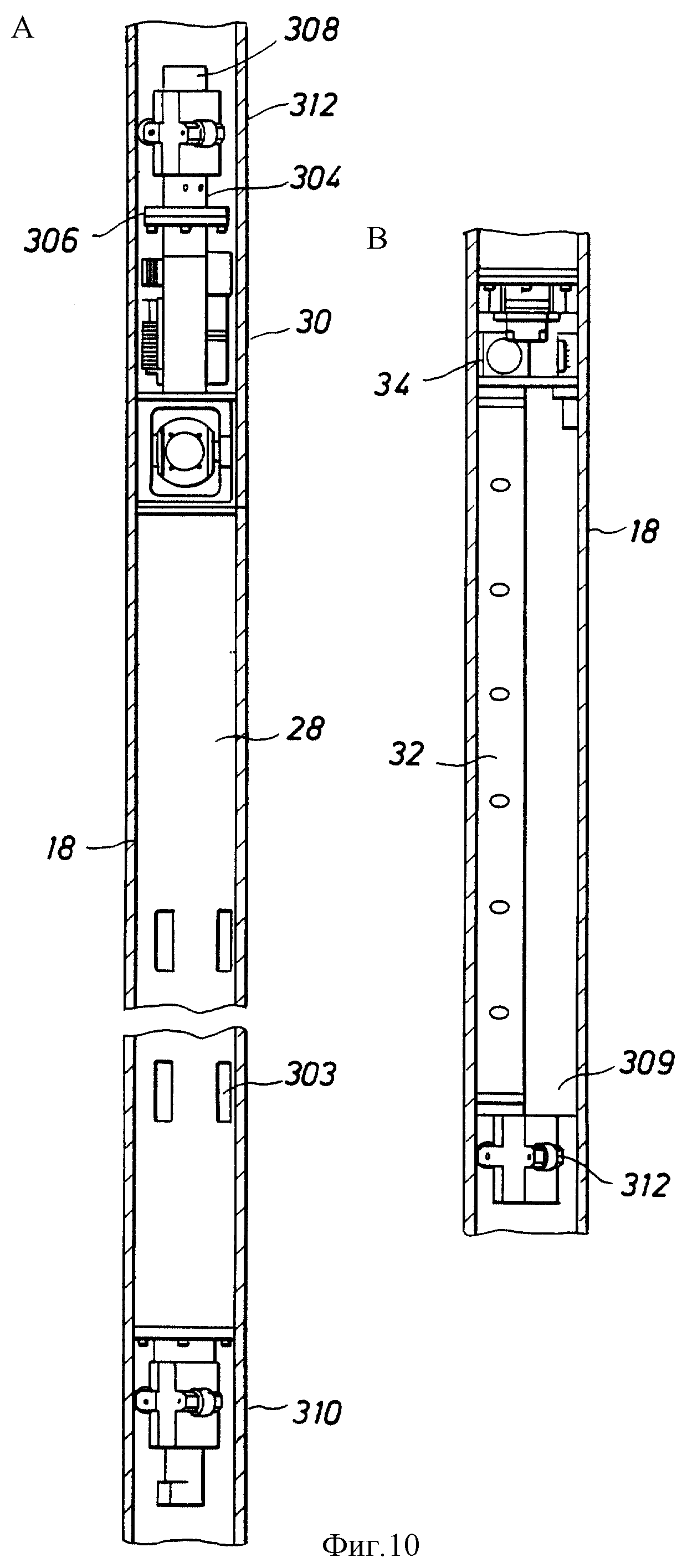
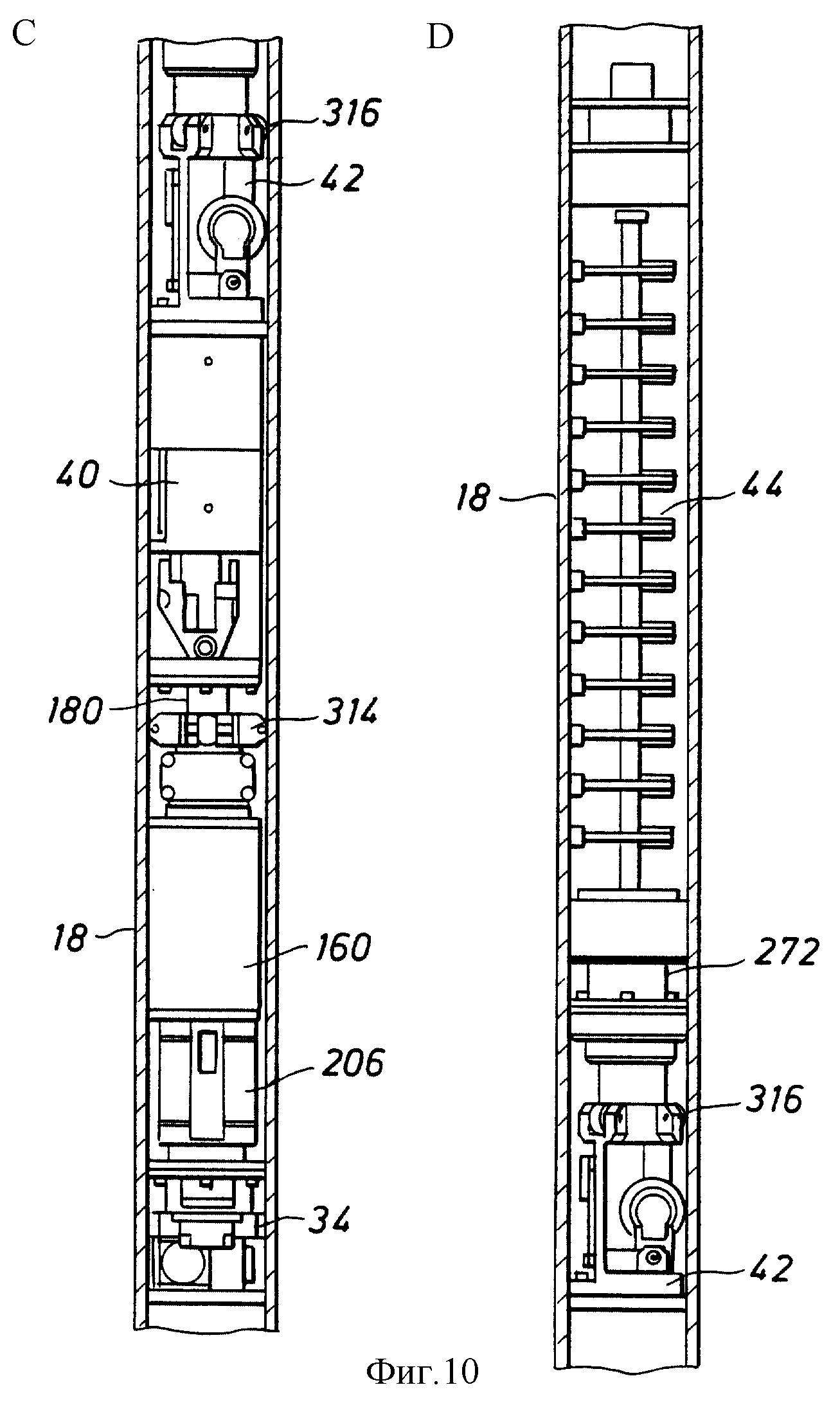
фиг. 10А-10D изображают последовательные части прибора согласно настоящему изобретению;
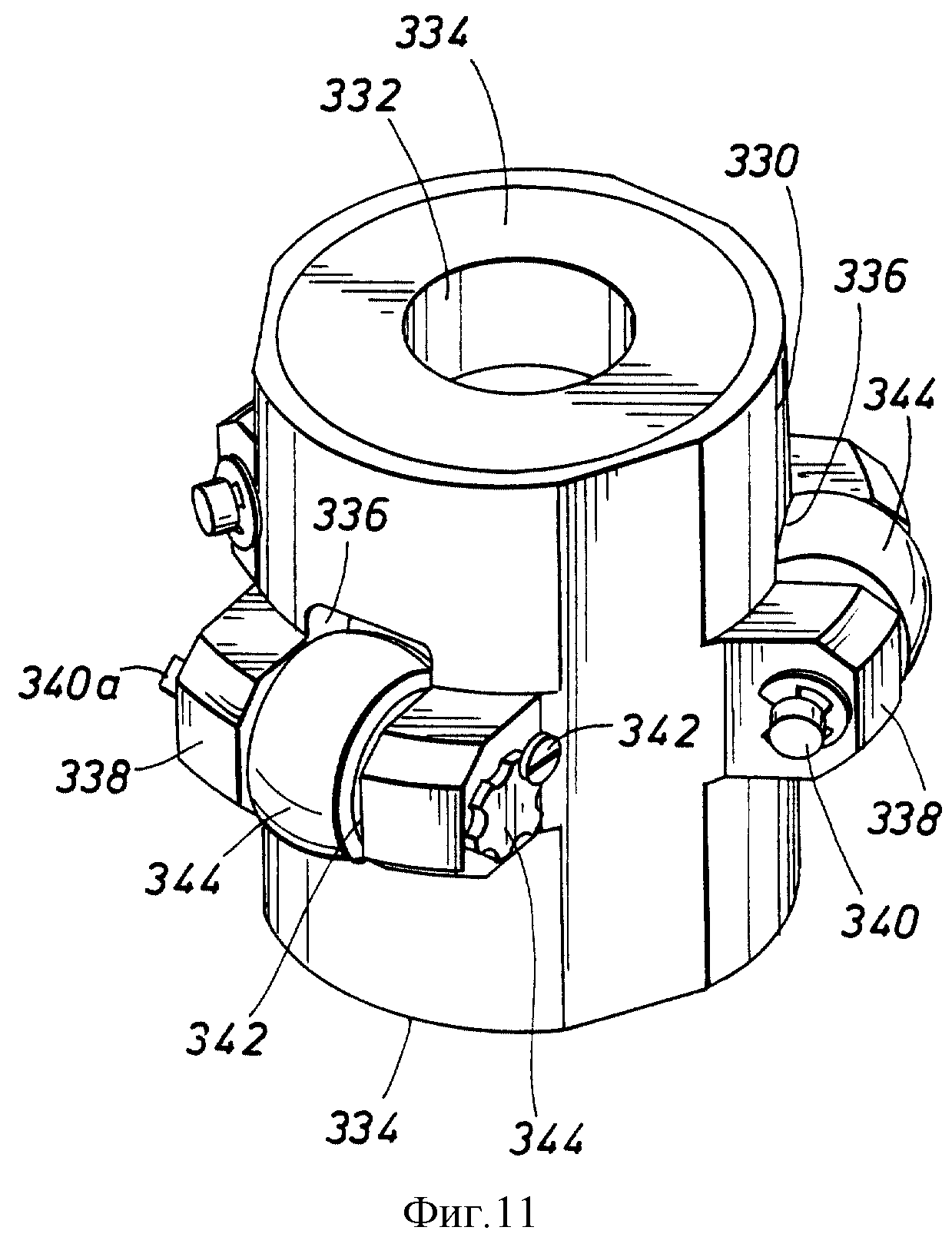
фиг. 11 изображает изометрический вид
роликового узла.
В настоящем описании одни и те же детали обозначены на различных фигурах одними и теми же номерами. Как показано на фиг. 1, зонд 10 подвешен в скважине 12 на тросе 14, закрепленном на поверхности 16. Трос 14 служит для опускания и подъема зонда 10 в скважине 12. Положение зонда 10 в скважине 12 регулируется с поверхности 16. Скважина 12 может быть обсажена трубами, облицована или может иметь открытую поверхность.
Зонд 10 представляет собой удлиненный полый сосуд 18 высокого давления, который в состоянии выдерживать давление, температуру и воздействие текучих сред в скважине. Внутри сосуда 18 высокого давления установлен прибор 20 гравитационной разведки. Прибор 20 состоит из вращающейся части 22 и невращающейся части 24. Вращающаяся часть 22 может вращаться вокруг продольной оси 26 сосуда 18 высокого давления. Вращающаяся часть 22 и невращающаяся часть 24 выполнены таким образом, что могут совместно перемещаться вдоль продольной оси 26 сосуда 18 высокого давления для осуществления измерений силы тяжести.
Вращающаяся часть 22 включает в себя гравиметр 28, приводной узел 30 универсального шарнира, электронный регулятор 32, блок 34 акселерометров, привод 36 вращения вокруг продольной оси и токосъемный узел 38. Гравиметр 28 представляет собой гравиметрический датчик для измерения силы тяжести в различных пунктах вдоль скважины. Перед измерением силы тяжести в определенном пункте приводной узел 30 универсального шарнира и привод 36 вращения вокруг продольной оси устанавливают ось чувствительности гравиметрического датчика в вертикальное положение.
Работа приводного узла 30 универсального шарнира и привода 36 вращения вокруг продольной оси контролируется электронным регулятором 32, который реагирует на сигналы блока 34 акселерометров. Сигналы блока 34 акселерометров определяются углом наклона прибора 20 по отношению к вертикали. Токосъемный узел 38 служит для передачи электрических сигналов между вращающейся частью 22 и невращающейся частью 24 гравиметрического прибора 20.
Невращающаяся часть 24 включает в себя механизм 40 подъема, узел 42 оптического шифратора и узел 44 подпружиненного кабеля. Механизм 40 подъема перемещает прибор 20 целиком из одного положения в следующее внутри сосуда 18 высокого давления.
Узел 42 оптического шифратора измеряет перемещение гравиметра 28 из одного положения в следующее. Узел 44 подпружиненного кабеля контролирует положение кабеля при перемещении гравиметрического прибора 20 вдоль сосуда 18 высокого давления.
Прибор 20 гравитационной разведки прикреплен к головке 46 с проходной втулкой (на чертеже не показана), через которую к прибору 20 с поверхности 16 подводится электропитание. Носовой узел 48 при ударе о него прибора 20 действует как амортизатор.
Хотя на фиг. 1 прибор 20 показан в вертикальной скважине, ясно, что настоящее изобретение не ограничивается вертикальными скважинами и может использоваться также и в наклонных и горизонтальных скважинах.
Как показано на фиг. 2, в конструкцию гравиметра 28 входит наружный сосуд 50 Дьюара. Внутри наружного сосуда 50 Дьюара находится нагревательная втулка 52, надетая на внутренний сосуд 54 Дьюара и печатную плату 56. Наружный стопор 58 удерживает нагревательную втулку 52, печатную плату 56 и внутренний сосуд 54 Дьюара внутри наружного сосуда 50 Дьюара.
Внутри внутреннего сосуда 50 Дьюара помещен корпус 60 датчика, закрепленный при помощи внутреннего стопора 62. Корпус 60 датчика включает в себя нагреватель (на чертеже не показан). Универсальный шарнир 64, установленный на валу 66, закреплен таким образом, что может вращаться внутри корпуса 60 датчика. Ось 68 вращения шарнира 64 смещена на некоторый угол относительно продольной оси 26 сосуда 18 высокого давления. Желательно, чтобы ось 68 вращения шарнира 64 была ортогональна продольной оси 26 сосуда 18 высокого давления. Гравиметрический датчик 65, измеряющий силу тяжести, закреплен внутри шарнира 64.
Сосуды 50, 54 Дьюара образуют для гравиметрического датчика 65 температурно-стабилизированную камеру 68. Как правило, в камере поддерживается температура на 25oC выше максимальной расчетной температуры скважины. Температура регулируется с точностью до 0,001oC и моделируется с точностью до 10-6oC. Небольшие остаточные изменения температуры в камере 70 компенсируются нагревателями корпуса 60 датчика и нагревательной втулки 52. Стопоры 58 и 62, установленные соответственно на торцах сосудов 50, 54 Дьюара, также нагреваются и препятствуют потоку тепла через торцы сосудов. Печатная плата 56, находящаяся рядом с внутренним сосудом 54 Дьюара, управляет работой нагревателей гравиметра 28.
Нагревательная втулка 52 содержит магнитный экран, который защищает гравиметрический датчик 65 в шарнире 64 от магнитных полей, присутствующих в скважине 12. Магнитные поля в скважине 12 могут создавать моменты, действие которых на датчик может привести к ошибкам в измерении силы тяжести. Разумеется, размещение магнитного экрана на нагревательной втулке не ограничивает настоящее изобретение. Магнитный экран может быть с тем же эффектом расположен и на корпусе датчика или на сосудах Дьюара.
На валу 66 универсального шарнира 64 установлен шкив 72. Трос 74 шарнира намотан на шкив 72, а свободные концы троса 74 проходят сквозь корпус 60 датчика и выходят из гравиметра 28 наружу. При работе прибора 20 свободные концы троса 74 шарнира связаны с приводным узлом 30 шарнира, который может стравливать или втягивать свободные концы троса 74 шарнира, вызывая тем самым поворот шарнира 64 вокруг его оси 68 вращения в заданном направлении на заданный угол. Диаметр троса 74 шарнира может быть выбран очень малым, что сведет к минимуму потери тепла и теплообмен между сосудами 50, 54 Дьюара и окружающей средой.
Как показано на фиг. 3А и 3В, приводной узел 30 универсального шарнира имеет раму 80 привода. Рама 80 привода шарнира состоит из верхней части 82 и нижней части 84. На верхней части 82 рамы 80 универсального шарнира установлены шаговый двигатель 86, редуктор 88 и катушка 90. Приводной вал шагового двигателя 86 связан с редуктором 88, который приводит во вращение катушку 90. Свободный конец компенсирующего троса 92, намотанного на катушку 90, прикреплен к пружине 94 винтовой стяжкой 96. В свою очередь, пружина 94 закреплена на кронштейне 98, установленном на раме 80 привода шарнира. Пружина 94 обеспечивает выбор люфта при остановке или реверсировании шагового двигателя 86. Разъем 100, установленный сбоку верхней части 82 рамы 80 привода шарнира, обеспечивает подвод электропитания к шаговому двигателю 86.
В нижней части 84 рамы 80 привода шарнира находится вал 102, опирающийся концами на два шарикоподшипника 103. На валу 102 находится кольцо 104 датчика, поддерживающее установочное кольцо 106 датчика. На валу 102 установлен также регулировочный кольцевой упор 108, сболченный с верхней частью установочного кольца 106 датчика, так что регулировочный упор 108 и установочное кольцо 106 датчика могут вращаться совместно.
На установочном кольце 106 установлен датчик 110 угла наклона. Этот датчик 110 представляет собой одноосный акселерометр, выполненный таким образом, что он вырабатывает сигнал ошибки, указывающий на отклонение оси чувствительности гравиметрического датчика 65 от вертикали. Когда ось чувствительности датчика 65 силы тяжести совпадает с вертикалью, датчик 110 угла наклона находится в горизонтальном положении, и его выходное напряжение равняется Voffset. Если сосуд 18 высокого давления движется по наклонной скважине, выходное напряжение датчика угла наклона становится равным Voffset + Vtilt , где составляющая Vtilt пропорциональна углу наклона оси чувствительности гравиметрического датчика 65 к фиксированному направлению. В датчике 110 угла наклона в качестве такого фиксированного направления используется направление поля тяготения Земли.
В процессе работы ведущий трос 112 наматывается на катушку 90. Свободные концы ведущего троса 112 прикреплены к винтовым стяжкам 114. Свободные концы троса 74 шарнира проходят от гравиметра 28 через первый ряд пазов 116 в нижней части 84 рамы 80 привода шарнира и через второй ряд пазов 118 в верхней части 82 рамы 80 привода шарнира и крепятся к винтовым стяжкам 120. Последние связаны с винтовыми стяжками 114 посредством соединительных элементов 122. Часть одного из свободных концов троса 74 шарнира обернута один раз вокруг регулировочного кольцевого упора 108 датчика, благодаря чему датчик 110 угла наклона и шарнир 64 гравиметра 28 вращаются совместно. Ведущий трос 112 и трос 74 шарнира должным образом натянуты, что исключает люфт в системе тросов при остановке или реверсировании шагового двигателя 86. Втулочная направляющая 124 обеспечивает прямолинейное перемещение тросов 74 и 112 при стравливании и втягивании.
Сигналы датчика 110 угла наклона направляются на электронный регулятор 32. Электронный регулятор 32 определяет по этим сигналам, нужно ли включать приводной узел 30 универсального шарнира для воздействия на шарнир 64, чтобы поддерживать вертикальную ориентацию гравиметрического датчика 65. Электронный регулятор 32 может послать электрический импульс на шаговый двигатель 86, чтобы заставить ведущий вал шагового двигателя 86 повернуться на определенный фиксированный угол. При вращении ведущего вала шагового двигателя 86 ведущий трос 112 наматывается на катушку 90 или сматывается с нее. Движение ведущего троса 112 передается тросу 74 шарнира и вызывает поворот шарнира 64 и датчика 110 угла наклона относительно соответствующих осей. При необходимости датчик 110 угла наклона и шарнир 64 могут совершить полный оборот вокруг соответствующих осей. При вращении шарнира 64 и датчика 110 угла наклона на электронный регулятор 32 поступают сигналы обратной связи от датчика 110 угла наклона. Когда датчик 110 угла наклона посылает сигнал, показывающий, что датчик 110 угла наклона находится в горизонтальном положении, электронный регулятор 32 останавливает шаговый двигатель 86. Электронный регулятор 32 с приводным узлом 30 универсального шарнира позволяют поддерживать вертикальную ориентацию датчика силы тяжести с точностью до 48,5 мкрад (или 0,00278o).
Хотя в данном варианте реализации настоящего изобретения для вращения шарнира 64 вокруг оси 68 используется приводной узел 30, ясно, что вращение шарнира 64 может осуществляться другими механизмами, например толкателем, зубчато-реечным механизмом или зубчатой передачей. Гравиметрический датчик 65 может быть также оборудован встроенным измерителем угла наклона, управление которым позволило бы поддерживать вертикальное положение датчика силы тяжести, однако обычный диапазон работы встроенного измерителя угла наклона составляет приблизительно 4,85 мрад (или 0,278o). Диапазон работы датчика 110 угла наклона, который отслеживает положение гравиметрического датчика 65 относительно вертикали, равен 360o, что позволяет эффективно поддерживать направление оси чувствительности датчика 65 в любой наклонной или горизонтальной скважине. Кроме того, предлагаемое изобретение в равной степени пригодно для тех применений, где датчик должен составлять с вертикалью некоторый заранее определенный угол, поскольку датчик угла наклона устроен таким образом, что он вырабатывает непрерывные сигналы обратной связи, определяющие отклонение датчика от вертикали.
Как показано на фиг. 4, в конструкцию блока 34 акселерометров входит рама 126 датчика, на которой установлены первое, второе и третье кольца датчиков, соответственно 128, 130 и 132. На кольцах 128, 130 и 132 установлены соответственно одноосные акселерометры 134, 136 и 138. Оси чувствительности трех акселерометров 134, 136 и 138 взаимно ортогональны, причем ось чувствительности акселерометра 134 совпадает с продольной осью 26 сосуда 18 высокого давления. Три акселерометра 134, 136 и 138 измеряют мгновенные ускорения вдоль соответствующих осей чувствительности. Эти данные направляются в электронный регулятор 32 для определения продольного наклона и поворота прибора 20. Внутри рамы 126 датчика установлена силовая распределительная плата (на чертеже не показана), обеспечивающая электропитание блока 34 акселерометров и электронного регулятора 32.
Как следует из фиг. 5, токосъемный узел 38 представляет собой тридцати двух проводниковый узел из контактных колец и щеток, заключенный в корпус 160 токосъемного узла, имеющий верхний конец 162 и нижний конец 164. Внутри корпуса 160 находится трубка 166, через которую может быть пропущен вал. В верхнем конце трубки 166 имеются отверстия 167 (фиг. 5В). На нижнем конце 164 корпуса 160 токосъемного узла имеются отверстия 168. Электрические провода, проходящие через корпус 160, выходят через отверстия 167 и 168 соответственно на верхнем и нижнем концах 162 и 164 корпуса 160 токосъемного узла. Между корпусом 160 токосъемного узла и трубкой 166 находится пара шарикоподшипников (на чертеже не показаны), которые обеспечивают вращение корпуса 160 токосъемного узла относительно продольной оси трубки 166. Роторы, статоры, щетки и контактные кольца (на чертеже не показаны), которые передают электрические сигналы в токосъемном узле 38, расположены между стенками трубки 166 и корпусом 160 токосъемного узла.
На верхнем конце 171 трубки 166 болтами закреплена втулка 170. Между втулкой 170 и трубкой 166 установлены волнистые пружины 172 и тефлоновая шайба 174, которые обеспечивают отсутствие люфта при остановке привода 36 вращения, вращающейся части 22 прибора 20 гравитационной разведки относительно продольной оси.
Как показано на фиг. 6, на верхнем конце 162 корпуса 160 токосъемного узла находится соединительный узел 180, который соединяет токосъемный узел 38 с механизмом 40 подъема. Соединительный узел 180 имеет верхнюю часть 182 и нижнюю часть 184. Нижняя часть 184 имеет вал 186, который входит в трубку 166 в корпусе 160 токосъемного узла. Вал 186 имеет внутреннее отверстие 190, сквозь которое проходят электрические провода от токосъемного узла 38. Отверстие 190 подходит к каналу 192 в верхней части 182 соединительного узла 180. Электрические провода, выходящие из отверстий 167 верхнего конца трубки 166 (фиг. 5В), входят в канал 192 через паз 194, сообщающийся с отверстием 190, и пазы 196, расположенные по окружности вокруг части 198 соединительного узла 180. Все провода, проходящие через канал 192, выходят из пазов 200 в верхней части соединительного узла 180 и входят в каналы 202 подъемного механизма 40. Соединительный узел 180 с помощью пары круговых пластинок 204 крепится к втулке 170, закрепленной болтами на трубке 166.
Стойка 206 двигателя, которая служит корпусом привода 36 вращения вокруг продольной оси, закреплена болтами на нижнем конце 164 корпуса 160 токосъемного узла. Привод 36 вращения вокруг продольной оси включает в себя шаговый двигатель 208, соединенный с передачей 210. Передаточный вал 212 передачи 210 связан с валом 186 соединительного узла 180 при помощи муфты 214.
Во время работы прибора на шаговый двигатель 208 привода 36 вращения вокруг продольной оси посылаются электрические импульсы, вызывающие поворот шагового двигателя 208 на некоторый определенный угол. В свою очередь, ведущий вал шагового двигателя 208 вращает передачу 210. Передаточный вал 212 пытается повернуть вал 186 соединительного узла 180. Однако, соединительный узел 180 закреплен на невращающейся части прибора 20, и поэтому вал 186 соединительного узла 180 вращаться не может. В результате между приводимым передаточным валом 212 и валом 186 соединительного узла 180 возникает момент, вращающий двигательную стойку 206, на которую опирается передаточный вал 212. При вращении стойки 206 вращается также корпус 160 токосъемного узла, закрепленный болтами на двигательной стойке 206, а также блок 34 акселерометров, электронный регулятор 32, привод 30 шарнира и гравиметр 28. При вращении корпуса 160 токосъемного узла трубка 166 не вращается.
Как показано на фиг. 7, подъемный механизм 40, который служит для перемещения прибора 20 вдоль оси сосуда 18 высокого давления, включает в себя корпус 230 подъемника. Внутри корпуса 230 подъемника установлен бесщеточный электродвигатель 232 постоянного тока. В качестве двигателя 232 может быть использован также шаговый двигатель. Ведущий вал двигателя 232 связан с зубчатым редуктором 214, вращающим пару червячных передач 236. Каждая червячная передача 236 вращает цилиндрическую шестерню 238. На каждой цилиндрической шестерне 238 имеется колесо 240, соприкасающееся с внутренней поверхностью сосуда 18 высокого давления. При вращении цилиндрических шестерен 238 колеса 240 ходят вверх и вниз по длине сосуда 18 высокого давления.
Колеса 240 поджаты к стенкам сосуда 18 высокого давления с помощью тарельчатых пружин 242. Тарельчатые пружины 242 опираются на стержень 243. На концах стержня 243 имеются рычаги 244, соединенные с валами 245 цилиндрических шестерен 238 и валами 246 червячных передач 236. Благодаря этому пружины 242 создают усилия, действующие на рычаги 244 и прижимающие колеса 240 к внутренней поверхности сосуда 18 высокого давления. Сила, создаваемая пружинами 242 и приложенная к стенке сосуда 18 высокого давления, обеспечивает сцепление, достаточное для поднятия веса прибора 20 гравитационной разведки, когда последний находится в вертикальном положении.
Двигатель 232 оборудован тормозом 247, который препятствует вращению двигателя 232, когда он находится в пункте измерения. Червячные передачи 236 также могут выполнять функцию тормоза, если шаг передачи выбран таким образом, что при вертикальном положении прибора 20 не создается обратный вращающий момент. Через каналы 202 по сторонам корпуса 230 подъемного механизма 40 проходят электрические провода от соединительного узла 180 (фиг. 6).
Хотя в рассматриваемом варианте реализации изобретения подъемный механизм 40 связан с гравиметром 28 таким образом, чтобы перемещать гравиметр внутри сосуда 18 высокого давления, ясно, что такое использование подъемного механизма 40 в данном изобретении не является ограничительным. Например, механизм 40 может быть заключен в герметичный маслонаполненный корпус и установлен вне сосуда 18 высокого давления, а гравиметр 28 может быть неподвижно закреплен внутри сосуда 18. В этом случае при выполнении гравитационных измерений установленный извне подъемный механизм поддерживал бы и перемещал сосуд высокого давления вдоль оси скважины. Такая конструкция позволяет проводить исследование на гораздо большую глубину, поскольку гравиметрический датчик можно в этом случае перемещать дальше тех положений, которые достижимы внутри сосуда высокого давления.
Вместо подъемного механизма для перемещения сосуда высокого давления вдоль скважины может также использоваться транспортный механизм, например канат, идущий через шкивы, или лебедка с вращающимся барабаном, установленная на поверхности. Сосуд высокого давления может быть быстро опущен в скважину при помощи установленного на сосуде высокого давления искателя муфт обсадной колонны. Этот искатель, который может представлять собой электромагнитный или акустический датчик или механический щуп, находит муфты обсадной колонны, расположенные внутри скважины на заданных глубинах. После обнаружения очередной муфты фактическое положение сечения, в котором проводится измерение, может быть определено с точностью в пределах 1-2 мм. Кроме того, механизм подъема может использоваться внутри сосуда высокого давления для перемещения гравиметрического датчика вдоль оси сосуда высокого давления, а транспортный механизм - для перемещения сосуда высокого давления вдоль оси скважины.
Показанный на фиг. 8 узел 42 оптического шифратора имеет установочную раму 250, на которой установлен подпружиненный рычаг 252. На рычаг 252 опирается оптический шифратор 254. Колесо 256 шифратора связано с оптическим шифратором при помощи вала 258. Колесо 256 шифратора должно быть изготовлено из материала, не меняющего размеров при изменении температуры, что позволит обойтись без температурной коррекции при измерении перемещения. Подходящим материалом для этой цели является инвар. При вращении колеса 256 вращается также и вал 258. На выходных клеммах оптического шифратора 254 вырабатываются электрические импульсы, пропорциональные скорости вращения вала 258. Внутри установочной рамы 250 находится разъем 260 для соединения электрических проводов, идущих от подъемного механизма 40 к узлу оптического шифратора 42. Предусмотрена также печатная плата (на чертеже не показана) для регистрации показаний оптического шифратора 254.
Существует ряд других устройств для измерения перемещения гравиметра внутри сосуда высокого давления. Например, если в механизме 40 подъема использован шаговый двигатель, то число шагов, потребовавшихся для перемещения из одного пункта измерения в следующий, может быть подсчитано и преобразовано в перемещение. Может быть использован также магнитный или оптический датчик, измеряющий вращение червячного колеса или цилиндрической шестерни механизма 40 подъема при перемещении этим механизмом прибора 20. Вместо оптического шифратора может быть использован также электрический шифратор.
Как видно на фиг. 9, узел 44 подпружиненного кабеля состоит из верхней части 270 и нижней части 272, соединенных между собой податливой цилиндрической пружиной (на чертеже не показана). Через равные промежутки по длине винтовой пружины в нее вставлены опоры 276, предотвращающие колебания пружины во время измерения силы тяжести. Коэффициент жесткости винтовой пружины может быть выбран таким образом, чтобы при полном растяжении пружины механизм 40 подъема не был нагружен весом узла 44 подпружиненного кабеля.
По мере того как механизм 40 подъема перемещает гравиметр 28 внутри сосуда 18 высокого давления из одного пункта измерения в другой, стержень 278, связанный с нижней частью 272, движется вместе с механизмом 40 подъема внутри канала, образованного витками винтовой пружины. Стержень 278 устроен таким образом, что при достижении гравиметром 28 крайнего верхнего или исходного положения, этот стержень входит в контакт с концевым выключателем 280, находящимся в верхней части 270 узла 44 подпружиненного кабеля.
Кабель, в котором находятся изолированные электрические провода, идет из верхней части 270 в нижнюю часть 272. Кабель предварительно навит таким образом, что он помещается внутри канала, образованного витками винтовой пружины и стержнем 278. При перемещении гравиметра 28 внутри сосуда 18 высокого давления кабель то растягивается, то снова скручивается.
В целом, конструкция прибора гравитационной разведки представляет собой компактную систему, что позволяет сделать диаметр прибора довольно малым, около 86 мм (3 3/8 дюйма) с возможностью уменьшения до 43 мм (1 11/16 дюйма). Последовательные части прибора 20 гравитационной разведки в сборе показаны на фиг. 10A-10D.
На фиг. 10A гравиметр 28 показан в нижнем конце прибора 20. На гравиметре 28 предусмотрены тефлоновые прокладки 303, отделяющие поверхность гравиметра 28 от внутренней поверхности сосуда 18 высокого давления. С одним концом гравиметра 28 связан приводной узел 30 шарнира, который выставляет гравиметрический датчик в гравиметре 28 по вертикали. Приводной узел 30 шарнира связан с электронным регулятором 32 посредством соединительного узла 304. Соединительный узел 304 состоит из фланца 306 и вала 308. Фланец 306 закреплен болтами на приводном узле 30 шарнира, а вал 308 крепится к установочному кронштейну 309 электронного регулятора 32.
Как видно на фиг. 10B, установочный кронштейн 309 электронного регулятора 32 крепится к раме датчика 120 блока 34 акселерометров. Рама 120 датчика крепится болтами к двигательной стойке 206, которая служит корпусом привода 36 вращения относительно продольной оси.
Согласно фиг. 10C, двигательная стойка 206 соединена болтами с корпусом 160 токосъемного узла 38. Фиксированная трубка 166 связана в корпусе токосъемного узла при помощи соединительного узла 180 с механизмом 40 подъема. На механизме 40 подъема установлен узел 42 оптического дешифратора.
Как показано на фиг. 10D, узел 42 оптического дешифратора крепится болтами к нижней части 272 узла 44 подпружиненного кабеля. Роликовые узлы 310, 312, 314 и 316 центрируют прибор 20 внутри сосуда 18 высокого давления.
Роликовые узлы 310 и 312, поддерживающие механизм 40 подъема и узел 42 оптического дешифратора, допускают осевое и вращательное перемещение вращающейся части прибора 20 в сосуде 18 высокого давления. Роликовые узлы 314 и 316, на которые опирается невращающаяся часть прибора 20, допускают только осевое перемещение в сосуде 18 высокого давления.
Согласно фиг. 11, роликовый узел 310 (а также роликовый узел 312), поддерживающий приводной узел 30 шарнира и гравиметр 28 при вращении относительно продольной оси 26 сосуда 18 высокого давления, имеет корпус 330 с внутренним отверстием 332. Внутри отверстия 332 установлены два шарикоподшипника 334, на которые опирается вал 308 соединительного узла 304, показанного на фиг. 10A.
В стенке корпуса 330 имеются три паза 336, разнесенные по окружности корпуса 330 на 120o друг от друга. С обеих сторон от пазов 336 находятся установочные узлы 338, выступающие наружу за стенку корпуса 330. Установочные узлы 338 выполнены заодно с корпусом 330. В установочных узлах 338 имеются отверстия для концов осей 340. Каждая ось 340 опирается на два шарикоподшипника 342 с предварительным натягом, закрепленных на боковых сторонах узлов 338. Оси 340 могут быть выполнены из жесткой рессорной стали, что будет способствовать исключению радиальной игры.
На каждой оси 340 установлен ролик 344. Ролики 344 входят в пазы 336 стенки корпуса 330. Ролики 344 могут перемещаться по стенке сосуда высокого давления в направлении, параллельном его продольной оси.
Одна из осей, а именно ось 340а, установлена в своих опорных подшипниках эксцентрично, что обеспечивает плотную подгонку роликового узла 310 по внутреннему диаметру сосуда 18 высокого давления. Положение эксцентрично установленной оси 340а можно регулировать, ослабив винт 342, который фиксирует звездочку 344 с боковой стороны одного из установочных блоков. При ослабленном винте 342 ось 340а можно отрегулировать таким образом, что ролики 344 будут плотно подогнаны по внутреннему диаметру сосуда 18 высокого давления.
Конструкция роликовых узлов 314 и 316 аналогична конструкции роликовых узлов 310 и 312 за тем исключением, что подшипники в их отверстиях отсутствуют, и корпуса роликовых узлов неподвижно закреплены соответственно на соединительном узле 180 и узле 42 оптического дешифратора так, что соединительный узел 180 и узел 42 оптического дешифратора не вращаются, когда привод 36 вращения относительно продольной оси поворачивает вращающуюся часть прибора 20 гравитационной разведки.
При работе зонд 10 опускается в скважину 12 на конце троса 14. По мере опускания зонда 10 электронный процессор 36 непрерывно получает сигналы от датчика угла наклона и блока датчиков и с помощью приводного узла 30 шарнира и привода 36 вращения относительно продольной оси выставляет гравиметрический датчик по вертикали.
При проведении гравиметрической съемки зонд 10 опускается в скважину на тросе до некоторой нужной глубины. Затем зонд 10 фиксируется в скважине при помощи соответствующего зажимного механизма. Зажимной механизм обеспечивает стабильное положение датчика 65 при измерении силы тяжести. После того как зонд 10 закреплен в скважине, механизм 40 подъема перемещает прибор 20 гравитационной разведки внутри сосуда 18 высокого давления до тех пор, пока гравиметрический датчик 65 не окажется в нужном сечении. Одновременно узел 42 оптического шифратора регистрирует расстояние, пройденное прибором 20.
В сечении, где проводятся измерения, акселерометры блока 34 акселерометров измеряют мгновенные значения ускорения в трех ортогональных направлениях. Электронный регулятор 32 использует сигналы акселерометров для определения углов поворота прибора 20 гравитационной разведки вокруг продольной и поперечной осей относительно фиксированного опорного положения. В зависимости от угла поворота вокруг продольной оси электронный регулятор 32 включает шаговый двигатель привода 36 относительно продольной оси для дифференциального вращения прибора 20 вокруг оси, совпадающей с продольной осью 26 сосуда 18 высокого давления. Точно так же, в зависимости от угла поворота вокруг поперечной оси электронный регулятор 32 включает шаговый двигатель приводного узла 30 шарнира для шагового вращения катушки 90, которая, в свою очередь, поворачивает датчик 110 угла наклона и шарнир 64. По мере того как электронный регулятор 32 управляет приводом 36 вращения относительно продольной оси и приводным узлом 30 шарнира, чтобы выставить ось чувствительности гравиметрического датчика 65 по вертикали, датчик 110 угла наклона посылает сигналы, показывающие величину отклонения оси чувствительности гравиметрического датчика 65 от вертикали.
Когда датчик 110 угла наклона указывает, что ось чувствительности гравиметрического датчика 65 выставлена по вертикали, электронный регулятор 32 останавливает приводной узел 30 шарнира и привод 36 вращения относительно продольной оси. Электронный регулятор 32 может послать на поверхность сигнал, сообщающий, что гравиметрический датчик 65 выставлен по вертикали. После этого датчик 65 может быть включен с поверхности для выполнения измерения. После измерения силы тяжести механизм 40 подъема снова перемещает прибор 20 внутри сосуда 18 высокого давления до тех пор, пока гравиметрический датчик 65 не окажется в следующем пункте измерения. Узел 42 оптического шифратора регистрирует положение датчика 65 внутри сосуда 18 высокого давления. Регулятор 32 снова обеспечивает вертикальность оси чувствительности гравиметрического датчика 65 перед измерением силы тяжести. Процесс перемещения прибора 20 внутри сосуда 18 высокого давления, выставления оси чувствительности гравиметрического датчика 65 по вертикали и включения гравиметрического датчика 65 может продолжаться до тех пор, пока прибор 20 гравитационной разведки не коснется носового узла 48. Расстояние между последовательными пунктами измерения в сосуде высокого давления обычно составляет 1 м или более.
Хотя настоящее изобретение описано здесь на основании ограниченного числа предпочтительных вариантов реализации, специалистам должно быть ясно, что возможны многочисленные модификации и варианты прибора. Например, можно удлинить вращающуюся часть 22 прибора 20 гравитационной разведки и включить в нее узел 44 подпружиненного кабеля, что исключит необходимость в токосъемном блоке 38 для передачи сигналов между вращающейся частью 22 и невращающейся частью 24 прибора 20.
Реферат
Сущность: прибор содержит сосуд высокого давления, в котором на универсальном шарнире установлен гравиметрический датчик. Перед выполнением гравитационных измерений этот датчик выставляется по вертикали при помощи первого и второго шаговых двигателей. Первый шаговый двигатель осуществляет шаговое вращение шарнира относительно оси вращения шарнира, а второй шаговый двигатель - шаговое вращение шарнира относительно продольной оси сосуда высокого давления. Шаговые двигатели управляются электронным регулятором, который реагирует на сигналы блока акселерометров, измеряющего наклон сосуда высокого давления относительно вертикали. Механизм подъема перемещает гравиметрический датчик из одного пункта измерения силы тяжести внутри сосуда высокого давления в следующий пункт измерения, а оптический шифратор регистрирует положение гравиметрического датчика внутри сосуда высокого давления. Технический результат - повышение точности измерений. 3 с. и 28 з. п. ф-лы, 11 ил.
Комментарии