Способ измерения гравитационной постоянной - RU2633000C2
Код документа: RU2633000C2
Чертежи
Описание
Изобретение относится к области метрологии, а именно к способу измерения гравитационной постоянной вакуумированными крутильными весами.
Известен способ измерения гравитационной постоянной [1] (а.с. №492837, G01V 7/00, 1974 г.). Способ заключается в том, что притягивающие тела юстируют в азимутальном направлении в двух или нескольких позициях, измеряют на всех позициях периоды, амплитуды колебаний весов и приращение расстояния от первоначальной позиции, составляя систему уравнений, рассчитывают расстояния между взаимодействующими телами и гравитационную постоянную. Способ позволял осуществлять измерения с одним притягивающим телом. Такой вариант назывался однотактной схемой. При наличии симметрично расположенных двух равных притягивающих тел схему измерений называли двухтактной. С целью упрощения расчетов использовались притягивающие тела шаровой формы.
Недостаток такого способа заключается в том, что периоды колебаний весов, соответствующие различным позициям притягивающих тел, отклоняются от нормального значения из-за низкочастотного дрейфа положения равновесия и периода колебаний весов, обусловленного, прежде всего, влиянием микросейсм, амплитудные и частотные характеристики которых изменяются во времени. Дрейф вызывают и температурные флуктуации, однако влияние последних ослабляют термостатированием весов. Практически невозможно полностью избавиться от дестабилизирующего влияния микросейсм. Выбор оптимального соотношения геометрических параметров весов, гашение качаний магнитным демпфером, проведение измерений в ночное время и прочие меры лишь частично устраняют их влияние. Искажение периодов колебаний весов микросейсмами приводит к смещению значения гравитационной постоянной.
Наиболее близким по своей технической сущности к заявляемому объекту является способ измерения гравитационной постоянной (Карагиоз О.В., Измайлов В.П., Шахпаронов В.М. Патент РФ №2364896 на изобретение. Способ измерения гравитационной постоянной // Приоритет изобретения 31.07.08.), в котором с целью проведения длительных непрерывных измерений, уменьшения их погрешности, устранения дестабилизирующих факторов, связанных с присутствием оператора, узлы перемещения и фиксации имеют дополнительные линейки, подхватывающие шаровые тела секторами круглых отверстий, и электропривод, что обеспечивает перемещение притягивающих тел с одного отверстия неподвижной линейки на соседнее. Измерения состоят из чередующихся прямых и обратных циклов. В прямом цикле измерения начинаются с наиболее близкой к весам первой позиции притягивающих тел, в обратном - с наиболее удаленной. Измерения при крайних позициях являются общими для прямых и обратных циклов. В процессе измерений амплитуда колебаний весов изменяется. Обычно она постепенно растет. Такой эффект связан с перемещением притягивающих тел на новые позиции. В прямых циклах перемещение ведет к уменьшению запасенной энергии крутильной системы, в обратных - к ее более существенному приросту. Если положительная разность таких энергий превышает потери за счет внутреннего трения в нити подвеса, амплитуда колебаний со временем нарастает. В данном прототипе предлагается оригинальное расположение узлов перемещения и фиксации, способствующее увеличению разности периодов колебаний. Притягивающие тела перемещают и фиксируют перпендикулярно линии равновесия весов. В более простом варианте эти узлы располагаются на линии равновесия весов (патент на полезную модель 79342). Другие примеры реализации приведенных способов даны в патентах РФ на полезную модель 79343, 79685.
Целью изобретения является уменьшение погрешности измерений гравитационной постоянной за счет ослабления дестабилизирующих факторов, связанных с микросейсмами и неравновесными потоками разреженного газа, путем выбора и сохранения оптимальной амплитуды колебаний весов.
Поставленная цель достигается тем, что в программе, управляющей процессом измерений, устанавливается время между завершением измерений на очередной позиции и началом перемещения притягивающих тел на следующую позицию. Вследствие наличия гистерезисных потерь в материале нити подвеса колебания весов затухают по экспоненциальному закону. Чем меньше потери, тем выше добротность весов и время их релаксации. От периода колебаний добротность не зависит. В процессе измерения гравитационной постоянной амплитуда колебаний возрастает, если вносимая в крутильную систему энергия при перемещения тел с позиции на позицию в течение прямого и обратного циклов превышает потери вследствие внутреннего трения в нити подвеса. Эти потери удается существенно снизить (Карагиоз О.В., Измайлов В.П., Шахпаронов В.М. Патент РФ №114174. Устройство для термомеханической обработки нити подвеса крутильных весов // Приоритет полезной модели 19.09.11). При этом одновременно значительно уменьшается дрейф положения равновесия, обусловленный релаксацией напряжений в нити подвеса, При задержке начала перемещения притягивающих тел на очередную позицию вклад энергии в крутильную систему на протяжении прямого и обратного цикла снижается. При определенной задержке он будет равен потерям за счет внутреннего трения. Это позволит проводить измерения при заданной амплитуде в течение длительного времени.
Отличительный признак заявляемого способа не имеет сходных признаков в известных решениях и является полностью новым.
Циклическое перемещение притягивающих шаровых тел в обоих направлениях способствует уменьшению погрешностей, обусловленных воздействием микросейсм на точку подвеса крутильных весов. При определенной амплитуде достигаются наиболее благоприятные условия измерений. Снижается роль микросейсм и других дестабилизирующих факторов. Нелинейность системы еще не превышает уровня, ведущего к увеличению погрешности и усложнению расчетов. Возможность достижения положительного эффекта при осуществлении изобретения ясна из вышесказанного и подтверждается результатами проведенных измерений гравитационной постоянной.
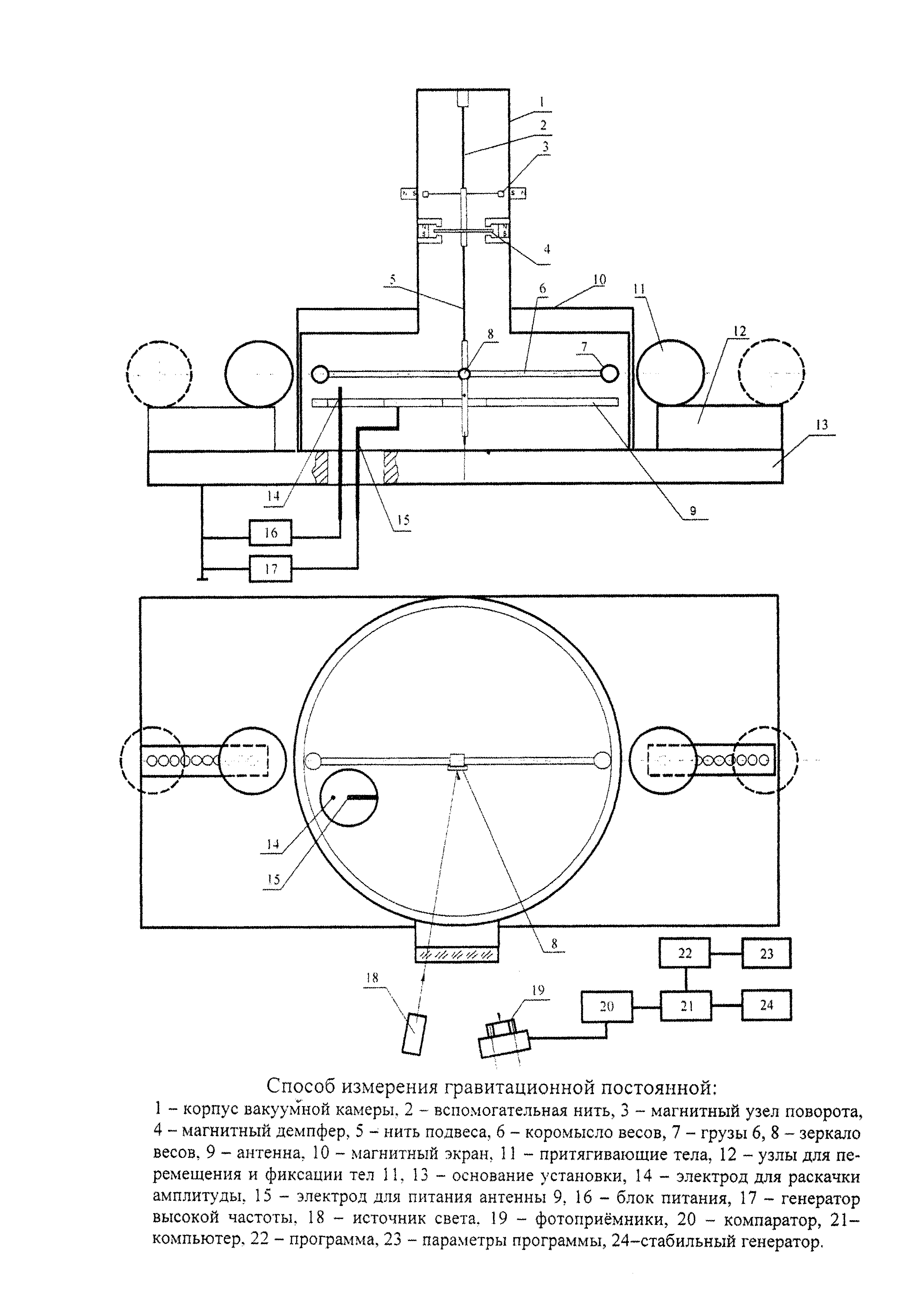
Способ поясняется чертежом, где 1 - корпус вакуумной камеры, 2 - вспомогательная нить, 3 - магнитный узел поворота, 4 - магнитный демпфер, 5 - основная нить подвеса, 6 - коромысло весов, 7 - грузы коромысла, 8 - зеркало весов, 9 - антенна для термомеханической обработки нити подвеса, 10 - магнитный экран, 11 - притягивающие тела, 12 - узлы для перемещения и фиксации шаровых притягивающих тел, 13 - основание установки, 14 - электрод для раскачки амплитуды, 15 - электрод для питания антенны 9, 16 - блок питания, 17 - генератор высокой частоты, 18 - источник света, 19 - фотоприемники, 20 - компаратор, 21 - компьютер, 22 - программа для управления узлами 12 и фиксации интервалов времени, 23 - параметры, вводимые в программу 22, 24 - генератор стабильной частоты.
Способ заключается в следующем.
Внутри вакуумной камеры 1 размещают крутильные весы, в которых на вспомогательной нити 2 крепится магнитный узел поворота 3, обеспечивающий поворот системы по азимуту, а также магнитный демпфер 4. В нем между полюсами магнитов расположен круглый диск, изготовленный из немагнитного материала с высокой проводимостью. Верхний конец крутильной нити весов 5 соединен с телом демпфера, а к ее нижнему концу крепится рабочее тело весов, включающее коромысло 6 с шаровыми грузами 7 на концах и отражающее зеркало 8. Антенна 9, расположенная под коромыслом с грузами, обеспечивает протекание тока высокой частоты величиной порядка 5 МГц через емкость между ее поверхностью и подвешенным к нити 5 телом весов. В процессе термомеханической обработки нити раскручивались на большой угол вследствие уменьшения внутренних напряжений, что способствовало снижению скорости дрейфа положения равновесия весов. Настройка системы осуществлялась после термообработки нити. Добротность системы на нитях подвеса из вольфрама обычно возрастала с 2000 до 20000. На нитях из сплава молибдена с рением МР-50 добротность достигала 5000. Магнитный экран 10, изготовленный из высококачественных марок пермаллоя, защищает весы от воздействия магнитных полей. Он устраняет возможное магнитное взаимодействие притягивающих тел 11 с телом весов. Шаровые притягивающие тела 11 фиксируются на круглых отверстиях узлов 12, которые устанавливаются на основании установки 13. Узлы 12 содержат дополнительные линейки для подхвата и перемещения шаровых тел с одного отверстия неподвижной линейки на соседнее с помощью электропривода. Электрод 14, связанный с блоком питания 16, позволяет задать начальную амплитуду колебаний. Через электроввод 15 высокая частота генератора 17 подается на антенну 9. Источник света 18 направляет на зеркало весов 8 через стеклянное окно камеры 1 луч света, который после отражения от зеркала выходит обратно и проходит мимо двух фотоприемников 19. С них сигналы с пологими фронтами подаются на компаратор 20. При определенной амплитуде компаратор опрокидывается. Его импульсы с крутыми фронтами поступают на входной порт компьютера 21, который завершает при этом измерение интервала времени, фиксирует его и начинает измерение нового. Последний восьмой интервал компьютер привязывает к реальному времени. Компьютер вводит запреты на преждевременное срабатывание при измерении малых и больших интервалов времени, что уменьшает вероятность его реакции на ложные сигналы. Малый интервал возникает при движении отраженного от зеркала весов луча света между фотоприемниками. Чем меньше величина малого интервала, тем больше амплитуда колебаний. Сумма четырех следующих друг за другом интервалов дает величину периода колебаний. На каждой позиции измеряется два полных периода, сдвинутых во времени на половину периода. Берется их средняя величина. Одна половина периода искажена процессом перемещения притягивающих тел. Она в расчетах не используется. После окончания измерений на данной позиции компьютер формирует время задержки на включение электропривода и задает время, в течение которого он не может быть выключен. При определенной паузе, заданной компьютером, амплитуда колебаний после завершения прямого и обратного циклов сохраняет первоначальное значение. Выключение двигателей осуществляется кнопочными выключателями после окончания заданного в программе времени и возвращения узлов перемещения в первоначальное положение. Для предотвращения аварийной ситуации в случае сбоя в системе управления предусмотрены кнопочные выключатели, обесточивающие привод до сброса притягивающих тел с узлов фиксации. Программа 22 с заданными параметрами 23, введенная в компьютер 21, обеспечивает весь процесс измерений. В компьютер 21 от внешнего стабильного генератора 24 вводится частота 500 Гц. Программа 22 частоту удваивает. Содержащийся в компьютере собственный генератор менее стабилен.
Предложенный способ был проверен на вакуумированных крутильных весах с различными периодами колебаний, нитями подвесов, притягивающими телами. После термомеханической обработки нити при размещении притягивающих тел на ближней к весам первой позиции проводилась юстировка по азимуту, при которой весы сохраняли положение равновесия. Затем шаровые тела перемещались на другую позицию, где вновь проверялось сохранение положения равновесия. Высокий вакуум значительно ослабляет влияние неравновесных потоков. Основной вклад вносят технические микросейсмы. Однако и естественные дают свой вклад. При постоянной амплитуде колебаний удается более строго осуществить блокировку ложных сигналов. Один ложный сигнал полностью нарушает работу системы. Для поддержания заданной амплитуды колебаний вводится задержка на включение электропривода. При периоде колебаний порядка 2000 с она составляет примерно 200 с. В паузах между измерениями задержка корректируется. Оптимальная амплитуда колебаний выбирается в диапазоне от 60 до 80 мрад. Дальнейшее увеличение амплитуды ограничено ростом нелинейности, снижающей точность расчетов. При этом повышаются требования к точности измерения амплитуды колебаний. При учете в уравнениях движения членов при пятой степени максимальный угол отклонения не должен превышать 80 мрад. При учете седьмой степени такой угол можно увеличить до 120 мрад. В программе для расчета гравитационной постоянной используется последний вариант. Он не привел к заметному увеличению времени вычислений. Используемая при расчетах теория нелинейных колебаний изложена в работе: Кузнецов А.И., Карагиоз О.В., Измайлов В.П. Частота ангармонических колебаний осциллятора при учете нелинейных членов седьмого порядка. // Измерительная техника. - 2005, 9, 11-13. Значительно большее время затрачивается в другом варианте - при численном интегрировании уравнений движения.
Реферат
Изобретение относится к способам определения гравитационной постоянной вакуумированными крутильными весами. Сущность: притягивающие тела устанавливают на заданных позициях. Задают начальную амплитуду колебаний крутильных весов. Измеряют на всех позициях периоды, амплитуды колебаний весов, а также массы, размеры, положение всех взаимодействующих тел. Рассчитывают моменты притяжения рабочего тела весов притягивающими телами и момент его инерции вокруг вертикальной оси. Определяют гравитационную постоянную по системе двух дифференциальных уравнений движения. При этом выбирают оптимальную амплитуду колебаний и удерживают ее в течение длительного времени, для чего подбирают время задержки перемещения притягивающих тел на следующую позицию с помощью электропривода и узлов перемещения и фиксации. В процессе проведения эксперимента в паузах между измерениями проводят расчеты периодов и амплитуд колебаний, по которым определяют гравитационную постоянную. После этого при необходимости корректируют время задержки, которое обеспечит более точное сохранение амплитуды колебаний. Технический результат: уменьшение погрешности измерений гравитационной постоянной за счет ослабления влияния микросейсм и других дестабилизирующих факторов. 1 ил.
Комментарии