Способ измерения гравитационной постоянной - RU2633804C2
Код документа: RU2633804C2
Чертежи
Описание
Изобретение относится к области метрологии, а именно к способу измерения гравитационной постоянной вакуумированными крутильными весами при не шаровой форме грузов коромысла.
Известен способ измерения гравитационной постоянной [1] (а.с. №492837, G01V 7/00, 1974 г.). Способ заключается в том, что притягивающие тела юстируют в азимутальном направлении в двух или нескольких позициях, измеряют на всех позициях периоды, амплитуды колебаний весов и приращение расстояния от первоначальной позиции, составляя систему уравнений, рассчитывают расстояния между взаимодействующими телами и гравитационную постоянную. Способ позволяет осуществлять измерения с одним притягивающим телом. Такой вариант назывался однотактной схемой. При наличии симметрично расположенных двух равных притягивающих тел схему измерений называли двухтактной. С целью упрощения расчетов использовались притягивающие тела шаровой формы.
Недостаток такого способа заключается в том, что периоды колебаний весов, соответствующие различным позициям притягивающих тел, отклоняются от нормального значения из-за низкочастотного дрейфа положения равновесия и периода колебаний весов, обусловленного, прежде всего, влиянием микросейсм, амплитудные и частотные характеристики которых изменяются во времени, и неравновесными потоками разреженного газа. Выбор оптимального соотношения геометрических параметров весов, гашение качаний магнитным демпфером, проведение измерений в ночное время и прочие меры лишь частично устраняют влияние указанных дестабилизирующих факторов. Искажение периодов колебаний весов микросейсмами и неравновесными потоками разреженного газа приводит к смещению значения гравитационной постоянной.
Наиболее близким по своей технической сущности к заявляемому объекту является способ измерения гравитационной постоянной (Карагиоз О.В., Измайлов В.П., Шахпаронов В.М. Патент РФ №2364896 на изобретение. Способ измерения гравитационной постоянной // Приоритет изобретения 31.07.08), в котором с целью проведения длительных непрерывных измерений, уменьшения их погрешности, устранения дестабилизирующих факторов, связанных с присутствием оператора, узлы перемещения и фиксации имеют дополнительные линейки, подхватывающие шаровые тела секторами круглых отверстий, и электропривод, что обеспечивает перемещение притягивающих тел с одного отверстия неподвижной линейки на соседнее. Измерения состоят из чередующихся прямых и обратных циклов. В прямом цикле измерения начинаются с наиболее близкой к весам первой позиции притягивающих тел, в обратном - с наиболее удаленной. Измерения при крайних позициях являются общими для прямых и обратных циклов. В данном прототипе предлагается оригинальное расположение узлов перемещения и фиксации, способствующее увеличению разности периодов колебаний. Притягивающие тела перемещают и фиксируют перпендикулярно линии равновесия весов. В более простом варианте эти узлы располагаются на линии равновесия весов (патент на полезную модель 79342). Другие примеры реализации приведенных способов даны в патентах РФ на полезную модель 79343, 79685.
Целью изобретения является расширений функциональных возможностей способа на случай цилиндрической формы грузов коромысла, что обеспечивает удобство при монтаже рабочего тела и позволяет изготавливать его из более широкого круга материалов.
Поставленная цель достигается тем, что рассчитывают моменты притяжения грузов коромысла при шаровой и цилиндрической форме с осевыми отверстиями, уравнивают моменты подбором диаметра цилиндрических грузов. При равной длине и диаметре цилиндрических грузов момент их притяжения обычно немного превышает моменты притяжения шаровых грузов той же массы. Поэтому следует увеличить диаметр грузов. Расчеты проводятся быстро и точно, поскольку при шаровой форме притягивающих тел и цилиндрической форме грузов требуется всего лишь трехкратное интегрирование.
Отличительный признак заявляемого способа не имеет сходных признаков в известных решениях и является полностью новым.
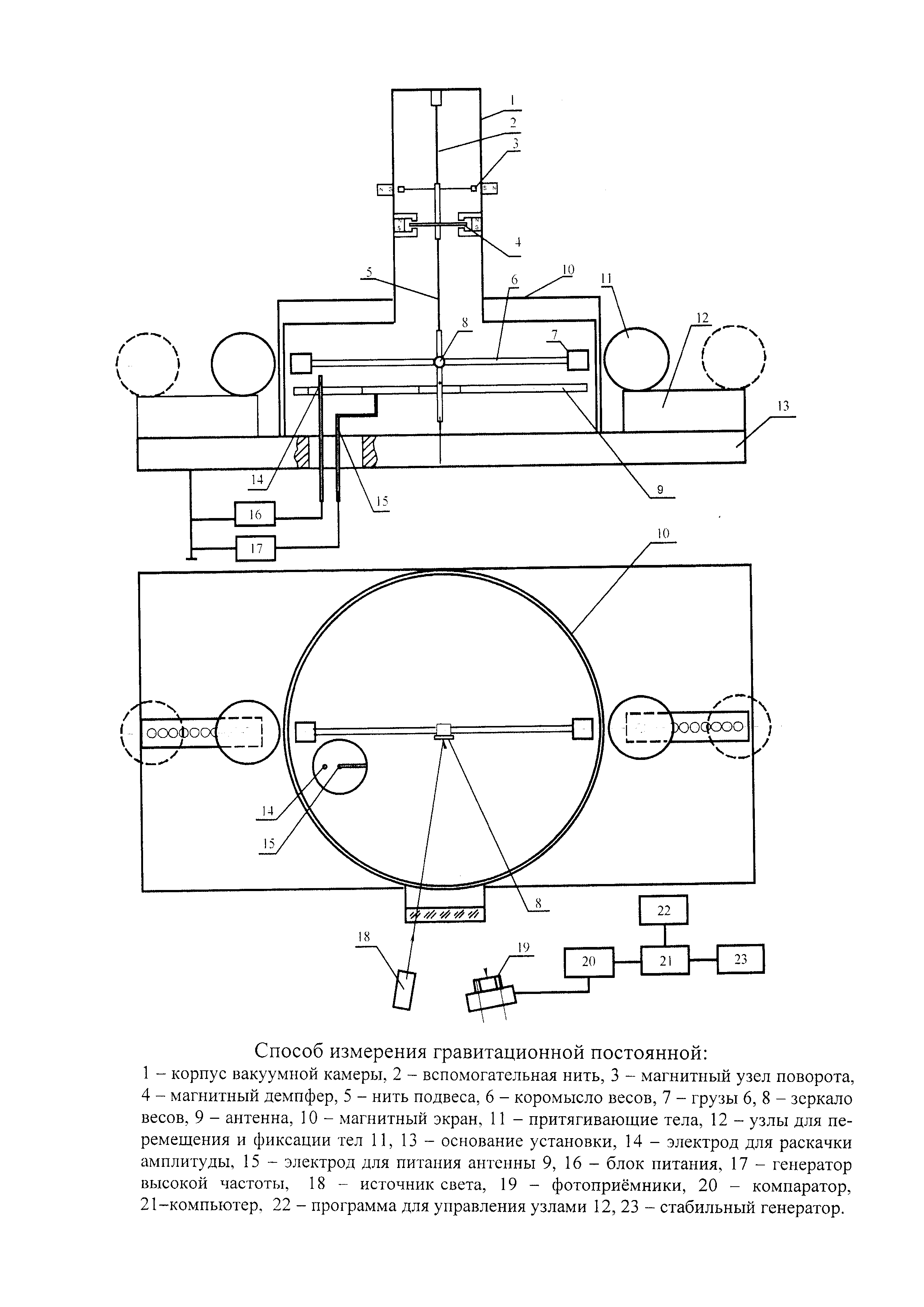
Способ поясняется чертежом, где 1 - корпус вакуумной камеры, 2 - вспомогательная нить, 3 - магнитный узел поворота, 4 - магнитный демпфер, 5 - основная нить подвеса, 6 - коромысло весов, 7 - грузы коромысла, 8 - зеркало весов, 9 - антенна для термомеханической обработки нити подвеса, 10 - магнитный экран, 11 - притягивающие тела, 12 - узлы для перемещения и фиксации шаровых притягивающих тел, 13 - основание установки, 14 - электрод для раскачки амплитуды, 15 - электрод для питания антенны 9, 16 - блок питания, 17 - генератор высокой частоты, 18 - источник света, 19 - фотоприемники, 20 - компаратор, 21 - компьютер, 22 - программа для управления узлами 12 и фиксации интервалов времени, 23 - генератор стабильной частоты.
Способ заключается в следующем. Внутри вакуумной камеры 1 размещают крутильные весы, в которых на вспомогательной нити 2 крепится магнитный узел поворота 3, обеспечивающий поворот системы по азимуту, а также магнитный демпфер 4. В нем между полюсами магнитов расположен круглый диск, изготовленный из немагнитного материала с высокой проводимостью. Верхний конец крутильной нити весов 5 соединен с телом демпфера, а к ее нижнему концу крепится рабочее тело весов, включающее коромысло 6 с цилиндрическими грузами 7 на концах и отражающее зеркало 8. Антенна 9, расположенная под коромыслом с грузами, обеспечивает протекание тока высокой частоты величиной порядка 5 МГц через емкость между ее поверхностью и подвешенным к нити 5 телом весов. Магнитный экран 10, изготовленный из высококачественных марок пермаллоя, защищает весы от воздействия магнитных полей. Он устраняет возможное магнитное взаимодействие притягивающих тел 11 с телом весов. Шаровые притягивающие тела 11 фиксируются на круглых отверстиях узлов 12, которые устанавливаются на основании установки 13. Узлы 12 содержат дополнительные линейки для подхвата и перемещения шаровых тел с одного отверстия неподвижной линейки на соседнее с помощью электропривода. Электрод 14, связанный с блоком питания 16, позволяет задать начальную амплитуду колебаний. Через электроввод 15 высокая частота генератора 17 подается на антенну 9. Источник света 18 направляет на зеркало весов 8 через стеклянное окно камеры 1 луч света, который после отражения от зеркала выходит обратно и проходит мимо двух фотоприемников 19. С них сигналы с пологими фронтами подаются на компаратор 20. Его импульсы с крутыми фронтами поступают на входной порт компьютера 21, который завершает при этом измерение интервала времени, фиксирует его и начинает измерение нового. Малый интервал возникает при движении отраженного от зеркала весов луча света между фотоприемниками. Чем меньше величина малого интервала, тем больше амплитуда колебаний. Сумма четырех следующих друг за другом интервалов дает величину периода колебаний. После окончания измерений на данной позиции компьютер формирует время задержки на включение электропривода и задает время, в течение которого он не может быть выключен. Выключение двигателей осуществляется кнопочными выключателями после окончания заданного в программе времени и возвращения узлов перемещения в первоначальное положение. Программа 22, введенная в компьютер 21, обеспечивает весь процесс измерений. В компьютер 21 от внешнего стабильного генератора 23 вводится частота 500 Гц.
Способ измерения гравитационной постоянной динамическим методом основан на измерениях периодов колебаний весов. Электродом 14 задают начальную амплитуду колебаний крутильных весов. Затем многократно измеряют на всех позициях притягивающих тел периоды и амплитуды колебаний весов. Измеряют также массы, размеры и положение всех взаимодействующих тел. По ним рассчитывают моменты притяжения рабочего тела весов притягивающими телами и момент его инерции вокруг вертикальной оси. Гравитационную постоянную определяют по системе двух дифференциальных уравнений движения, которые содержат все указанные параметры. При отклонении формы взаимодействующих тел от шаровой возникают проблемы с вычислением моментов притяжения тела весов. При цилиндрической форме грузов коромысла требуется трехкратное интегрирование. Оно при современном уровне техники не приводит к большим затратам времени на вычисления. Однако реализовать его при решении дифференциальных уравнений движения невозможно. Поэтому для существенного упрощения расчетов диаметр цилиндрических грузов выбирают таким, при котором при малом угле отклонения моменты притяжения грузов при шаровой и цилиндрической форме в ближней к весам позиции 1 притягивающих тел совпадают. Проверяют полученное равенство при других углах отклонения и позициях притягивающих тел. Отмечают малую погрешность. Собирают весы с цилиндрическим грузами, используя осевые отверстия для крепления коромысла с грузами по скользящей посадке. Расчеты гравитационной постоянной проводят по системе уравнений, в которых моменты притяжения имеют простые аналитические выражения для шаровой формы взаимодействующих тел. Существенно уменьшают погрешность расчетов введением в программу двух массивов корректирующих множителей по углам отклонения весов и позициям притягивающих тел.
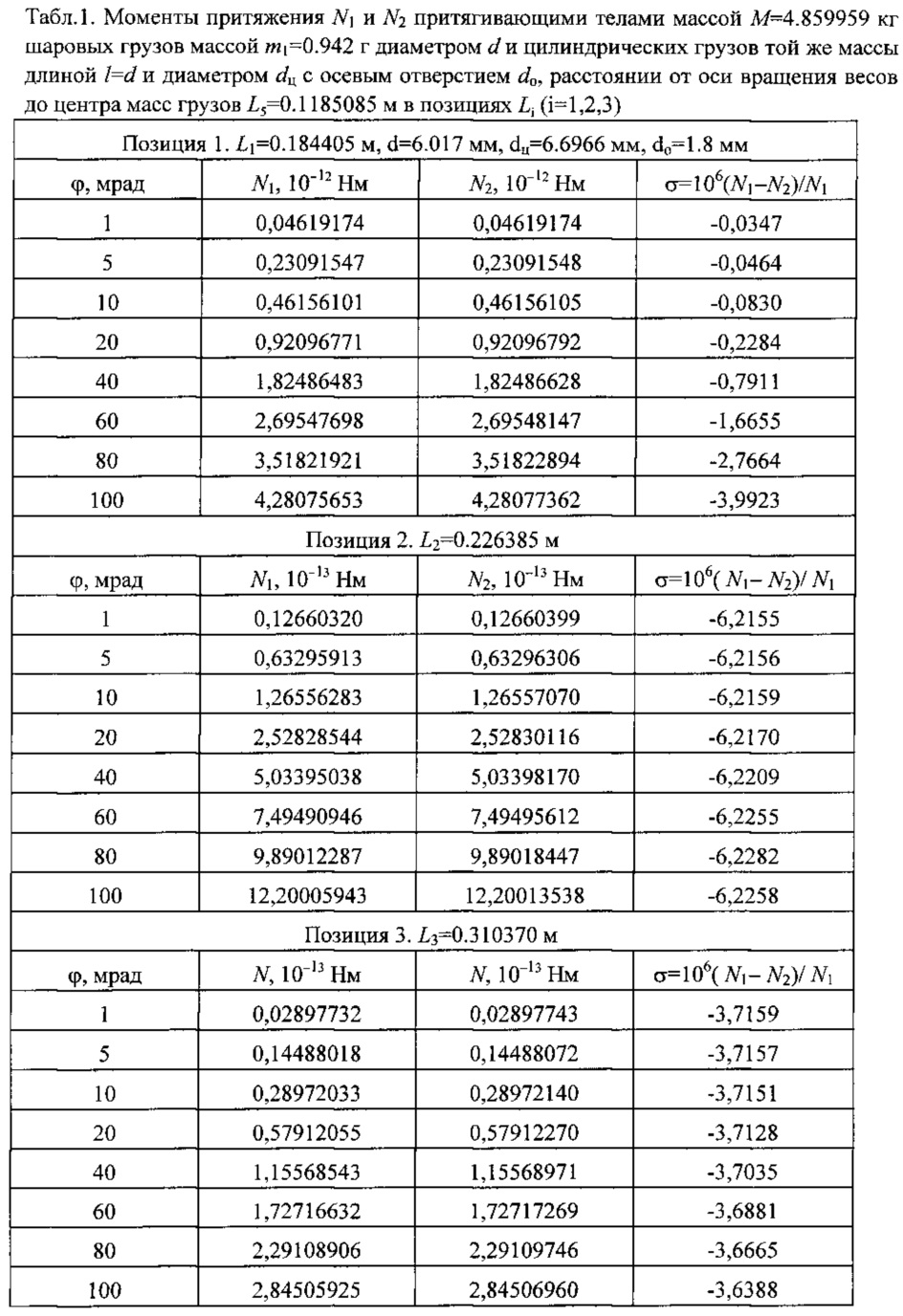
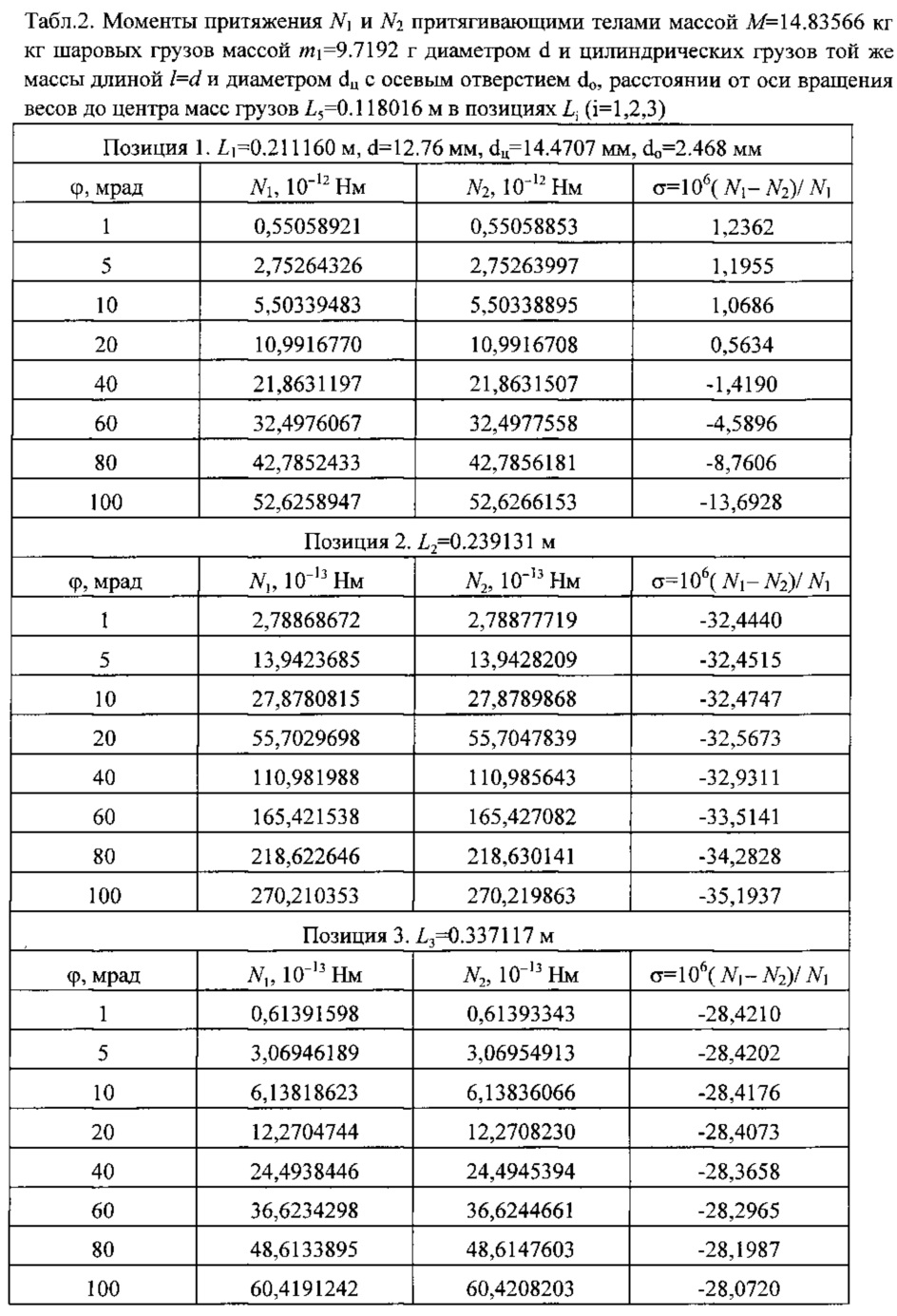
Предложенный способ иллюстрируется на примере двух проведенных экспериментов с крутильными весами. В табл. 1 использовались весы с малыми массами. Сначала в первой позиции при малом значении ϕ достигается минимальное значение σ=106(N1-N2)/N1, где N1 и N2 - моменты притяжения притягивающими телами массой М=4.859959 кг шаровых грузов массой m1=0.942 г диаметром d и цилиндрических грузов длиной l=d и диаметром dц той же массы с осевым отверстием dо. С увеличением ϕ и переходом на более удаленные позиции 2 и 3 величина σ возрастает, но не превышает величины 10 ppm (1 ррm=10-6). Аналогичная картина наблюдается и при увеличении габаритов и массы грузов на концах коромысла (табл. 2). Однако в этом случае величина σ заметно возрастает и превышает величину 10 ppm. Но поскольку σ остается все же малой величиной, ведение в программу для расчета гравитационной постоянной двух массивов корректирующих множителей сводит величину σ к уровню не более 1 ppm. Один массив корректирует величину N2 по величине ϕ, другой - по позициям 2 и 3. Значения корректирующих множителей близки к единице, поскольку отклонение N2 от N1 незначительно. Недостаток способа заключается в усложнении программы для расчета введением двух массивов множителей. Но более существенный положительный эффект предложенного способа сводится к более технологичной сборке тела весов, использованию широкого класса немагнитных материалов (в том числе и с высокой плотностью, получаемых методом порошковой металлургии).
Реферат
Изобретение относится к способам определения гравитационной постоянной вакуумированными крутильными весами. Сущность: притягивающие тела устанавливают на заданных позициях. Задают начальную амплитуду колебаний крутильных весов. Измеряют на всех позициях периоды, амплитуды колебаний весов, а также массы, размеры, положение всех взаимодействующих тел. Рассчитывают моменты притяжения рабочего тела весов притягивающими телами и момент его инерции вокруг вертикальной оси. Определяют гравитационную постоянную по системе двух дифференциальных уравнений движения. При этом заменяют шаровые грузы на цилиндрические с осевым отверстием, близким к диаметру коромысла. Диаметр грузов выбирают таким, при котором при малом угле отклонения моменты притяжения грузов при шаровой и цилиндрической форме в ближней к весам первой позиции притягивающих тел совпадают. Проверяют полученное равенство при других углах отклонения и позициях притягивающих тел. Собирают весы с цилиндрическим грузами, используя осевые отверстия для крепления коромысла с грузами по скользящей посадке. Расчеты гравитационной постоянной проводят по системе дифференциальных уравнений, в которых моменты притяжения имеют простые аналитические выражения для шаровой формы взаимодействующих тел. Уменьшают погрешность расчётов введением в программу двух массивов корректирующих множителей по углам отклонения весов и позициям притягивающих тел. Технический результат: определение гравитационной постоянной при цилиндрической форме грузов коромысла. 2 табл., 1 ил.
Комментарии