Установка для обработки ленточного материала в газовой среде - SU406382A3
Код документа: SU406382A3
Чертежи



Описание
1
Известна установка для обработки ленточного материала в газовой среде, содержащая ряд камер для удержания и обработки проходящего между ними материала, имеющих отверстия для выхода (газа, заправочное приспособление для .проведения материала через установку, валки для поддержания материала и приводной электродвигатель.
Такая установка неудобна тем, что заправочное приспособление не обеспечивает надежную заправку материала.
Предлагаемая установка отличается от известной тем, что для повышения надежности заправки матернала, з аправочное приспособление выполнено в виде пары бесконечных эластичных связей, снабженных захватом , а на одной оси с каждым валком и.меются шкивы, огибаемые эластичными связями , ведущий шк,И1В, приводимый от индивидуального прлвода, и холостые колеса. За .хват состоит из пары подпружиненных рычагов , зажимающих Материал и закрепленных «а участках бесконечных связей посредством стержней.
Установка снабжена приспособлением для измерения натяжения .материала, выполненным в виде ролика, взаимодействующего с обрабатываемым материалом, имеющего возможность перемещения посредством подвижного троса и регул.«рующего через датчик
работу приводного электродвигателя, а также снабжена устройством для компенсации веса рол.ика.
Уста.новка снабжена также центрирующим приспособлением, выполненным в виде вращающегося валка, взаимодействующего с обрабатываемым материалом, один конец которого поворачиваться относительно другопо посредством двигательного домкрата, управляе .мого в зависимости от положения кромок матер.иала посредством детекторов пололсения кромок.
На фиг. 1 ,и 2 изображена предлагаемая
установка, разрез; на фиг. 3-8 - узлы заиравочного приспособления установки; на
фиг. 9 - центрирующее приспособление; на
фиг. 10 и 11 - захват в двух проекциях.
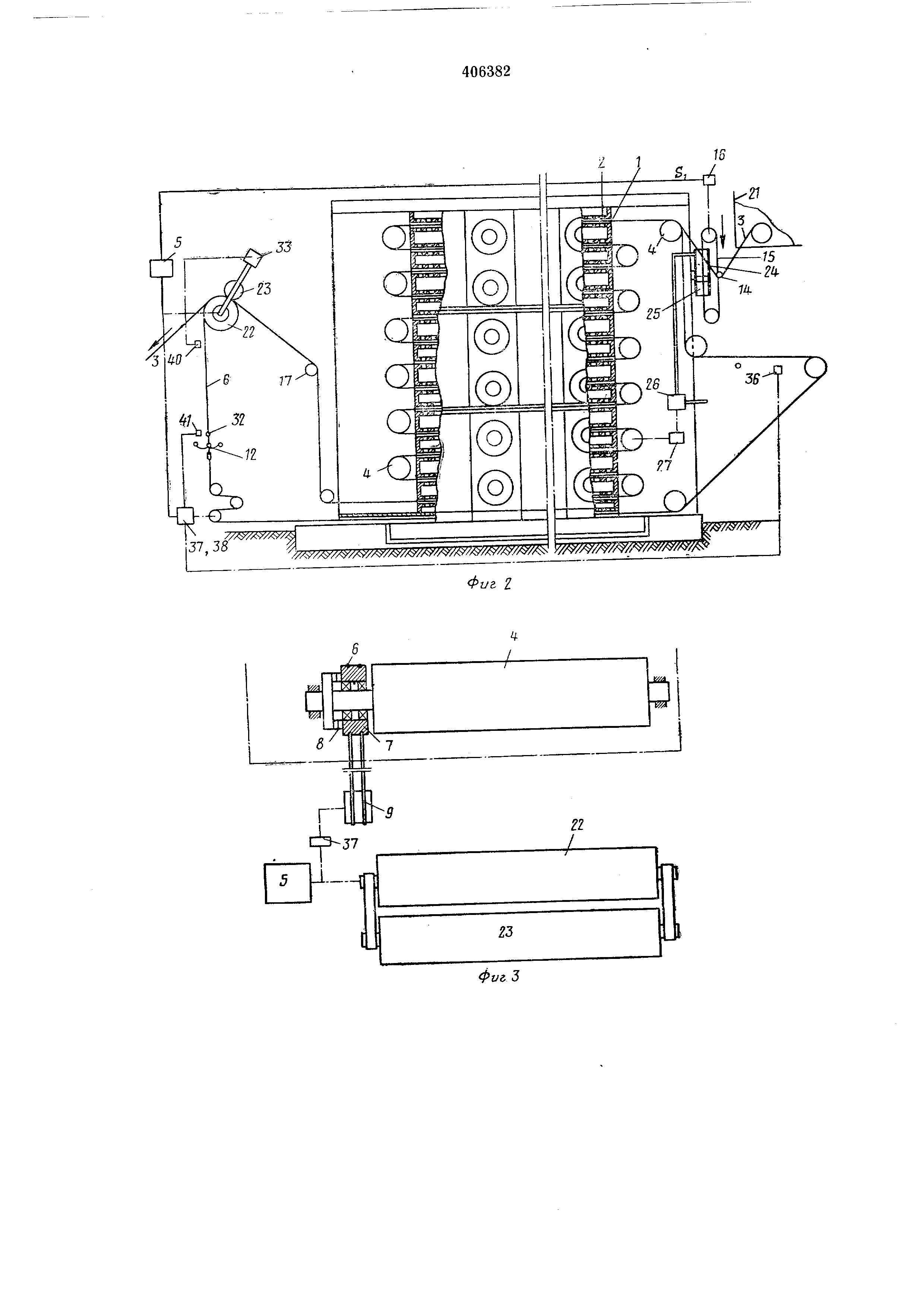
Установка состоит из камер 1 с отверстТИЯМ .И 2 для выхода газа, между которыми проводят обрабатываемый материал 3, иоддержи .ваемый валками 4, заправочного приспособления н электродвигателя 5.
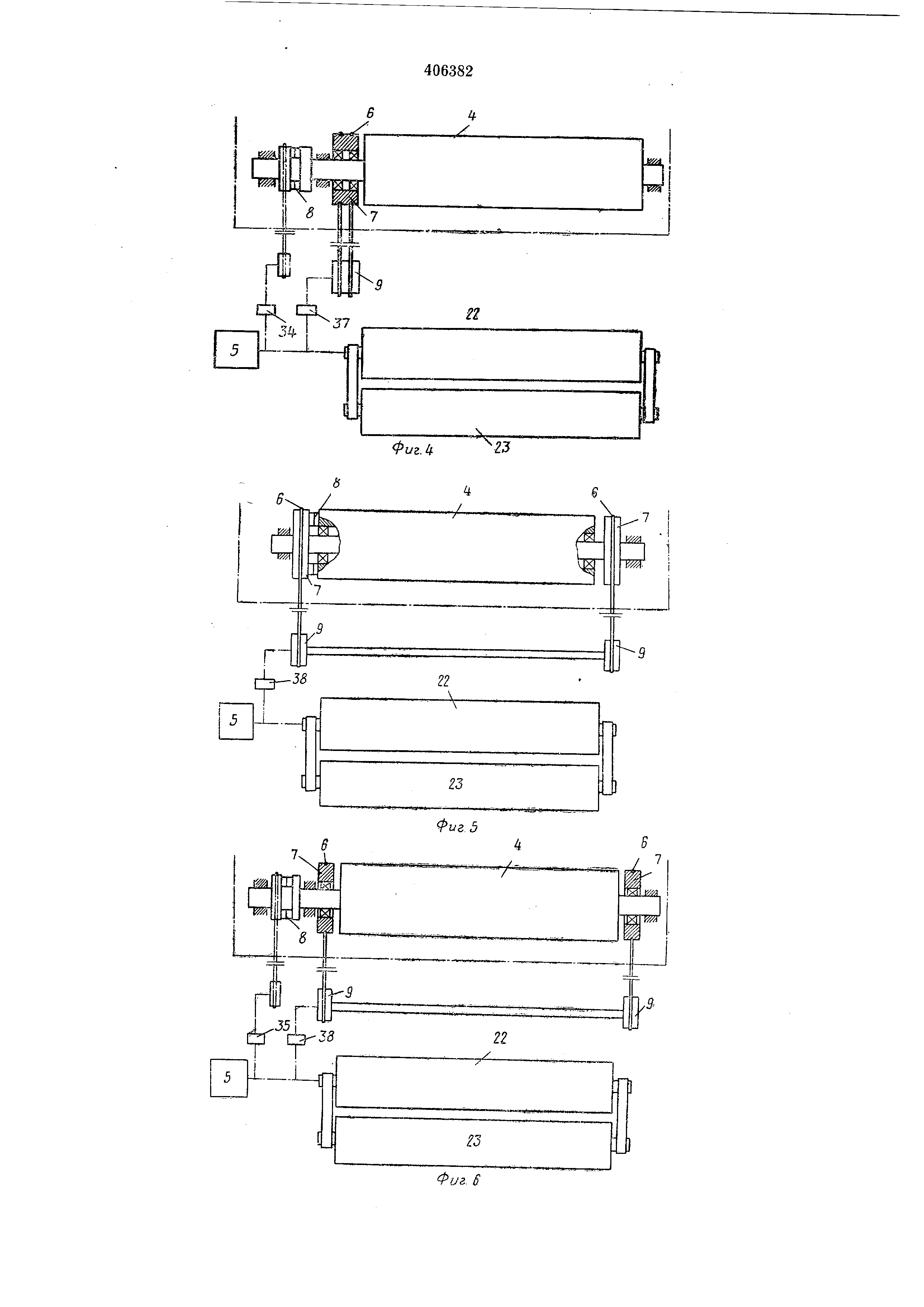
Заправочное приспособление выполнено в виде пары бесконечных эластичных связей 6, огибающих щкивы 7, смонтированные вместе с холостыми колесами 8 на одной оси с валками 4 и приводимые от индивидуального 1привсда 9.
Захват 10 состоит из пары поднружиненных рычагов 11, зажимающих материал 5 и
расположенных на стержне 12, который прикреплен .к участкам эластичных связей 6.
Установ ка снабжена приспособлением 13 для измерения натяжения материала, -выполнеаным в виде ролика 14, взаимодействующего с обрабатываемым материалом 3 и перемещающегося посредством подвижного троса 15 с воздействием пр,и этом на датчлк 16, регулирующий .работу электродвигателя 5.
Нижнее положение стержня 14 соответствует повышенной скорости двигателя 5, в то время как верхнее положение ролика 14 соответствует пониженной скорости двигателя 5.
Подвижный ролик -14 вызывает .натяжение ленты материала 3 во время операции заправки , которое создается ПОд действием веса ролика 14.
При этих условиях, когда вход ленты материала 3 осуществляется через верхнюю часть установки, а выход через нижнюю часть установки, натяжение, вызываемое роликом 14, в любой момент равно или несколько превышает вес, соответствующий весу ленты матеряала 5, .проходящей верти.кально между входом .и выходом ycTHHOBKiH. В этом случае возможно регулирование скорости электродвигателя 5.
Установка снабжена центрирующ.им приспособлением , выпол-ненйым в виде вращающегося валка 17, вза.имодействующего с обрабатываемым материалом .3. Один конец 18 этого валка .может поворачив1аться относительно другого при взаимодействии с двигательньш до.м;кратом 19, .приводимым .в движеНие п.р,и получении сигнала от детекторов 20 положения .кромок матер|Иала 3, контактируюш )их с последним.
Работает установка следующим образом.
Перед входом в юамеры обработки лента материала 3 подается .маши.ной 21 с определенной скоростью. Лента материала, выходящая из камер обработки, отводится нажимны .ми валкамй 22 и 23, причем .работа электродвигателя 5 этих .валков управляется двигателем (не показан),обеспечивающ.им ло.дачу ленты 3 из машины 21.
В этих услови)ях колебания натяжения ленты материала 3 возникают главным образом в результате продольной усадки ленты материала во время сушки, падения высоты ленты .при каждом прохождении из камеры обработки в другую камеру обработки, расположенную непосредственно под ней.
Целесообразно уста.новить на входе в установку приспособление 13 для яз.мерения натяжевия , по которому проходит лента материала 3 перед ност-уплением в первую камеру обработки /. Это приспособление посылает сигнал, позвол1яющий изменять скорость вращения электродвигателя 5 относительно скорости работы, контролируемой двигателем, обеспечивающим подачу ленты материала 5 маши.ной 21.
Чтобы учитывать падение высоты, которое претерпевает лента .материала 3 при каждо.м прохождении из камеры обработки в следующую камеру обработки, расположенную непооредственно под ней, целесообразно установить компенсируюшее устройство 24, воздействующее на систему подвижного троса 15 и шкивов для того, чтобы увеличить кажущийся вес подвижного ролика 14, когда происходит падение высоты.
Компенсирующее устройство выполнено в
виде домкрата 25, напри.мер пневматического,
в котором поршень ,или мемб.рана составляют
одно целое с тросом системы троса 15 я шкиВОВ .
Питание пневматический домкрат получает от распределителя 26, управляемого детек/ором 27, который следует за ходом ленты материала 3 в установке или дает показание о ходе ленты.
Детектор содержит счетчик числа оборотов , установленный на оси одного из обводных валков 4.
Такая .компенсация веса подвижного рол.ика 14 позволяет ограничивать натяжение ленты материала 5 на уровне, где она захватывается захватом 10, гак как во время заправки компенсирующее устройство 24 непрерывно повышает натяжение, вызываемое подвижным роликом 14, вплоть до -некоторой предельной величины, достигаемой в конце операции заправки.
В установках как с вертикальной, так и с гар.изонтальной камерой обработки целесообразно предус.мотреть приапособление центрирования , под действием которого лента матер:иала устанавливается симметрично относительно своей теоретической оси движения.
Центрирующий валок /7 приводится во вращение шкивом 28, соосным с центрирующим вал.ком 17 и имеющим первичный диаметр , равный диаметру валка. По шкиву 28 проходит бесконечная связь в, а между Шкивом 28 и центрирующим валком 17 находится холостое колесо 29, благодаря чему скорость валка 17 может превышать скорость шкива 28.
Двигательный домкрат 19 может быть пневматическим, гидравлическ1им или электрлческим . Сравнивающее устройство 30 центрирующего приспособления получает сигналы А и Б, подаваемые соответственно детекторами 20, и вырабатывает сигнал В, являющийся разностью двух этих сигналов. Распределитель 31 обеспеч1ивает питание двигательного домкрата 19 и управляется сигналом В так, что ось центрирующего валка 17 параллельна общей оси обводных валков 4, ко.гда сигнал В равен нулю, и наклонена в ту или другую сторону по отношению к общей оси, когда сигнал В является положительным и отрицательным.
Детекторы 20 могут быть механическими и давать у-казания в виде давления воздуха или же оптическими и давать указания в виде электрического напряжения.
Такая конструкция позволяет центри;ро,вать ленту материала 3 по отношению к ее теоретической оси движения, что особенно важно для лент с более или менее значительной поперечной усадкой при обработке разных сортОВ материала.
Центрирующее приспособление с детекторами , расположеннымИ симметрично, дают при отсутствии ленты материала нулевой сигнал .
Это играет роль прл центральной запр.авке с бесконечной связью по обе стороны обводных валков, так как при отсутствии ленты , т. е. при залравке, ось центрирующего валка должна быть Параллельна общей оси обводных валков для т0:го, чтобы пути, по которым пойдут бесконечные связи, были равны.
Это центрирующее приспособлевие начинает действовать (автоматически, когда лента материала 3 достигает минимальной различимой щирины после прохождения захвата 10 вплоть до нормальной щирины.
В этом случае установка действует следующим образом. Захват 10 предварительно подводится на уровень, где лента мате1риала 3 выходит из мащины 21.
Захват открыт, и лента материала 3 проходит между передним стержнем 12 и задним стержнем 32 захвата.
Нажимной валок 23 поддерживается отведенным от нажимного валка 22 механизмом 33. Запускают электродвигатель 5, пряводят в движение нажимтой валок 22 с периферической скоростью, немного превыщающей скорость подачи ленты материала 3 мащиной 21, так как передвижной .ролик 14 занимает нижнее положение.
Для сцепления, что дает возможность электродвигателю 5 приводить в движение обводные валки 4, воздействуют на приспособление 34 -л 35.
Приводят в действие контакт 36, который действует на сцепляющее приспособление 37 или 38, чтобы вызвать сцепление, что дает возможность электродвигателю 5 приводить в движение одну или несколько бесконечных связей 6, и захват закрывается благодаря неподвижному упору 39 и увлекает ленту материала 3 в установку.
Петля, образуемая лентой материала 5 после начала работы, быстро ликвидируется под действием повыщенной скорости электродвигателя 5, создаваемой нижним положением ролика 14, лента материала 3 подходит под подвижной ролик 14 и начинает подниматься, в результате чего электродвигатель 5 получа ет такую скорость, что достигается синхронность между скоростью бесконечной связи или связей 6, приводящих в движение захват 10 и леиту материала, и скоростью, с которой лента материала 3 выходит из машины 21.
Обводные валки 4 проходят через захват 10 без всякого понижения скорости при контакте этих валков с захватом 10 и захваченной ими лентой материала 3.
По мере заправки и прохождения материала сушка вызывает продольную усадку ленты материала 3, в результате чего создается натяжение, которое свободно передается на начальную часть установки и поднимается до неподвижного стержня 14, который при этом поднимается.
Скорость электродвигателя 5 и, следовательно , линейная скорость материала 3, захваченного захватом 10, подвергается натяжению , которое продолжает оставаться слабым, что очень важно при обработке хрупкого материала (например, бумажной массы древесного прои-схождения).
После выхода из носледней камеры обработки захват 10 проходит по налсимному валку 22, снабженному ведущими шкивами такого же первичного диаметра (не показаны) для бесконечной связи или связей 6, и приводит в действие электрический контакт 40, который воздействует на механизм 33. Это вызывает соприкосновение двух нажимных валков 22 и 23, которые обеспечивают при этом отвод vienты материала без уменьшения скорости. Захват 10 приводит затем в действие электрический контакт 41, который воздействует на сцепляюп ее приспособление 34 или 35, чтобы вызвать расцепление, что прекращает приведение в движение обводных валков 4 электродвигателем 5.
После этого операция заправки ленты материала 3 з акончена (фиг. 2).
Когда захват 10 остановлен, можно освободить конец ленты материала 3, открывая захват , и ввести ленту в следующую машину (не показана).
Чтобы произвести новую заправку, возвраЩают захват 10 на уровень машины 21, воздействуя вручную на сцепляющее приспособлеи .не 37 я 38.
Заправочное приспособление может быть выполнено автоматическим, и оно не вызывает появления повышенных натяжений ленты материала , в частности, на уровне, где эта лента захватывается захватом. Это позволяет осуществлять 3 аправку ленты относительно крупного материала, напри-мер бумажной массы.
50
Предмет изобретения
1. Установка для обработки ленточного материала в газовой среде, содержащая ряд камер для удержания и обработки проходящего между ними материала, имеющих отверстИхЧ для выхода газа, заправочное приспособление для проведения материала через установку, валки для поддержания материала и приводной электродвигатель, отличающаяся
тем, что, с целью повыщения надежности запрэвки материала, заправочное приспособление выполнено в виде пары бесконечных эластичных связей, снабженных захватом, а на одной оси с каждым валком имеются щкивы,
огибае.мые эластичными связями, ведущий
шкив, приводимый от индивидуального привода , .и холостые колеса.
2.Установка по п. 1, отличающаяся тем, что зах1ват состоит из пары подпружиненных рычагов, зажимающих материал и закрепленных на участках бесконечных связей посредством стержней.
3.Установка по in. 1, отличающаяся тем, что она снабжена приспособлением для измерения натяжения материала, выполненным в виде ролика, взаимодействующего с обрабатываемым материало-м, имеющего возможность перемещения посредством подвижного троса
и регулирующего через датчик работу приводного электродвигателя, la также снабжена устройством для компенсации веса ролика.
4. Установка по п. 1, отличающаяся тем, что она снабжена центрирующим приспособлением , выполненным в виде вращающегося валка, взаимодействующего с обрабатываемым материалом, один конец которого может поворачиваться относительно другого посредством двигательного домкрата, управляемого в зависимости от положения кромок материала посредством детекторов положения кромок.



Реферат
Формула
Комментарии