Устройство и способ оценки сгибателя колена - RU2626872C2
Код документа: RU2626872C2
Чертежи






















Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для использования при оценке силы по меньшей мере одной мышцы-сгибателя колена субъекта, и в одном из примеров - для оценки по меньшей мере силы мышц задней поверхности бедра по меньшей мере на одной ноге субъекта, пока субъект выполняет эксцентрическое сокращение сгибателя колена.
Уровень техники
В этом описании упоминание о какой-либо предшествующей публикации (или информации, полученной из нее) или о каких-либо сведениях, которые известны, не является и не должно принято в качестве подтверждения или допущения или какой-либо формы предположения о том, что предшествующая публикация (или информация, полученная из нее) или известные сведения составляет часть общедоступных знаний в области деятельности, к которой относится настоящее описание.
Повреждения растяжением мышц задней поверхности бедра (HSI) являются обыкновенными как для любителей, так и для профессиональных участников в различных видах спорта, включая спринт, атлетику, европейский футбол и футбол других типов. Кроме того, после первоначальной HSI степень повторного возникновения травмы у субъекта высока, причем после последующих HSI период восстановления возрастает.
Проведено множество исследований факторов, которые влияют на восприимчивость субъекта к HSI, а также обстоятельств, которые способствуют восстановлению субъекта и снижают повторные случаи. Исследования, такие как Arnason et al. «Prevention of hamstring strains in elite soccer: an intervention study» (2008) 18 ScandJ Med Sci Sports, предполагают, что увеличенная эксцентрическая сила мышц задней поверхности бедра коррелирует с более низкой заболеваемостью HSI. Аналогичным образом, в WO 03/094732 предполагают, что повторные периоды эксцентрических упражнений для мышц задней поверхности бедра могут снижать восприимчивость субъекта к HSI, и в связи с этим в WO 03/094732 представлено примерное устройство для выполнения эксцентрических упражнений, которое содержит доску с подушкой и ремешки для лодыжки.
Несмотря на выводы, сделанные с помощью этих исследований, существующие способы и устройства для количественной оценки силы мышцы-сгибателя колена, такой как сила мышц задней поверхности бедра, не используют широко из-за множества существенных ограничений. Например, существующий золотой стандарт устройства для осуществления оценки силы мышц задней поверхности бедра представляет собой обычно расположенный в лаборатории изокинетический динамометр. Во время оценки субъект сидит или лежит на животе, причем лодыжка прикреплена к поворотному рычагу таким образом, что измеряется крутящий момент, прикладываемый ногой при вращении рычага, причем максимальную скорость вращения ограничивают посредством динамометра. Однако изокинетические динамометры дорого стоят, для них необходим опытный оператор, они обладают ограниченной портативностью и требуют значительного времени для независимой оценки каждой ноги субъекта. Таким образом, их главным образом используют для исследовательских целей и только изредка для профессиональных спортсменов или спортивных команд для оценки игроков с более высоким риском HSI, или для отслеживания прогресса реабилитации. Кроме того, среди обслуживающего спортивного персонала существует представление, что сама изокинетическая динамометрия представляет риск повреждения.
В WO 03/094732 описано устройство для оценки восприимчивости мышцы к повреждению во время эксцентрического сокращения, который содержит устройство для измерения крутящего момента для получения измерений крутящего момента, создаваемого с помощью мышцы под различными углами экстензии. Компьютер, соединенный с устройством для измерения крутящего момента, получает и обрабатывает измерения крутящего момента и оценивает восприимчивость к повреждению с использованием компьютерного программного обеспечения. Компьютерное программное обеспечение содержит принимающий данные компонент для приема измерений для крутящего момента, создаваемого с помощью мышцы под различными углами экстензии, компонент данных сравнения для хранения данных сравнения, репрезентативных для ожидаемых измерений для крутящего момента, который будет создаваться, если мышца не восприимчива к повреждению во время эксцентрического сокращения, и компонент оценки для сравнения получаемых измерений с данными сравнения для идентификации различий в измерениях крутящего момента при тех же углах экстензии.
В US 5,662,591 говорится об устройстве для измерения силы и для осуществления физических терапевтических упражнений на разгибание конечности пациента. Устройство содержит пару поворотных зажимов, каждый имеет конец для соединения поворотных зажимов с твердым объектом, таким как стол для физической терапии или больничная койка. Второй конец каждого поворотного зажима с возможностью корректировки принимает первый элемент рамы от стандартной рамы для мышечной тяги или нагрузочной рамы. Эта конфигурация допускает вращательное и поступательное движение первого элемента рамы, удерживаемого с помощью поворотного зажима относительно каждого поворотного зажима обеспечения возможности размещения рамы в желаемом местоположении и ориентации относительно конечности исследуемого пациента. Второй элемент рамы с возможностью корректировки соединяют с парой первых элементов рамы посредством пары корректируемых скоб. Взаимодействующий с конечностью элемент, который имеет расположенный в нем силовой преобразователь, используют как для взаимодействия с конечностью исследуемого пациента, так и для обнаружения силы, прикладываемой между конечностью пациента и взаимодействующим с конечностью элементом. Силовой преобразователь создает выходной сигнал, который представляет развиваемую силу, которую можно отображать на измерителе с цифровой панелью.
В US 3,285,070 изобретение относится к устройству, адаптированному для использования в программе физического развития и/или реабилитации. Более конкретно, изобретение относится к устройству для оценки и увеличения силы различных мышц и групп мышц организма человека.
В US 3,374,675 изобретение относится к эргометрическим устройствам или устройству для изометрического исследования мышц, и более конкретно к таким устройствам, в которых мышечную силу физического движения можно измерять между начальным суставом движения элемента организма и конечности или по меньшей мере другой удаленной части члена организма, мышцы которой подлежат исследованию. Такое тестирование в организме человека иногда обозначают как изометрическое исследование мышц, и два примера его наиболее общего использования заключаются в исследовании мышц при практическом осуществлении физической терапии и при физических тренировочных процедурах.
В US 4,889,108 описано упражнение для мышц и диагностическая система, которая содержит рычаг, монтажный узел для крепления рычага для вращения вокруг фиксированной оси и соединительный узел для соединения выбранной части организма человека с рычагом для вращения вокруг выбранной анатомической оси вращения. Соединительный узел обеспечивает фиксированное тангенциальное и скользящее крепление, допускающее свободное радиальное движение точки прикрепления пациента относительно оси вращения рычага. Узел управления скоростью, соединенный с рычагом, ограничивает скорость в соответствии с предварительно выбираемой функцией управления скоростью. Радиальное расстояние от точки прикрепления до оси вращения измеряют и используют в функции управления скоростью. Диапазон пределов движения задают в одном из вариантов осуществления с помощью потенциометра для каждого предельного положения и с помощью нажимной кнопки и узла хранения пределов в другом варианте осуществления.
В US 4,909,262 описано устройство, в котором используют зажимной механизм для удерживания вращающейся конечности организма. Механический рычаг соединен с зажимным механизмом и поворотно соединено с поворотным элементом. Угловое вращение механического рычага вокруг поворотного элемента измеряют одновременно с силой, прикладываемой вращающееся конечностью организма к зажимному механизму. Тензодатчик соединен с зажимным механизмом для обеспечения измерения такой силы.
Следует принимать во внимание, что упомянутые выше известные решения страдают множеством недостатков, включая существенный размер или массу, что снижает портативность, и значительное время оценки, что препятствует массовым обследованиям, например, целых спортивных команд. Кроме того, известные способы и устройства не способны обеспечивать одновременную независимую оценку силы мышц задней поверхности бедра на обеих ногах во время двусторонних упражнений или комбинированную оценку силы мышц задней поверхности бедра на обеих ногах во время двусторонних упражнений. Кроме того, существующие способы обладают сомнительной надежностью и воспроизводимостью измерений дисбаланса сил между конечностями.
Раскрытие изобретения
Настоящее изобретение стремится устранить одну или более проблем, связанных с уровнем техники.
В первой расширенной форме настоящее изобретение направлено на создание устройства для использования при оценке силы по меньшей мере одной мышцы-сгибателя колена субъекта, причем устройство содержит:
a) опору;
b) два фиксирующих элемента, причем каждый фиксирующий элемент фиксирует соответствующую голень субъекта в положении, которое при использовании по существу фиксировано относительно опоры; и
c) по меньшей мере один датчик, который при использовании измеряет силу, указывающую на силу по меньшей мере одной мышцы-сгибателя колена по меньшей мере на одной ноге субъекта, когда субъект выполняет эксцентрическое сокращение по меньшей мере одной мышцы-сгибателя колена.
В общем случае по меньшей мере один датчик соединяют по меньшей мере с одним из двух фиксирующих элементов, и датчик измеряет силу, приложенную к голени субъекта.
В общем случае по меньшей мере один датчик включает в себя два датчика, причем каждый датчик соединен с соответствующим фиксирующим элементом, чтобы тем самым измерять силу, указывающую на силу по меньшей мере одной мышцы-сгибателя колена на каждой ноге субъекта.
В общем случае при использовании датчики измеряют силу, указывающую на силу по меньшей мере одной мышцы-сгибателя колена на каждой ноге субъекта одновременно.
В общем случае при использовании датчики измеряют силу, указывающую на силу по меньшей мере одной мышцы-сгибателя колена на каждой ноге субъекта в различные моменты времени.
В общем случае по меньшей мере один фиксирующий элемент прикреплен к датчику.
В общем случае фиксирующие элементы соединены с опорой.
В общем случае фиксирующие элементы подвижно установлены на опоре.
В общем случае опора содержит по меньшей мере одну коленную опору, которая при использовании поддерживает по меньшей мере одно колено субъекта.
В общем случае коленную опору устанавливают подвижно на опоре.
В общем случае устройство содержит электронное обрабатывающее устройство для:
a) отслеживания сигналов от по меньшей мере одного датчика; и
b) формирования по меньшей мере частично с использованием сигналов показателя, указывающего на силу мышц задней поверхности бедра по меньшей мере для мышц задней поверхности бедра.
В общем случае показатель указывает по меньшей мере на одно из:
a) мгновенной силы;
b) скорости развития силы;
c) средней силы;
d) пиковой силы;
e) импульса;
f) работы;
g) мгновенного крутящего момента;
h) скорости развития крутящего момента;
i) среднего крутящего момента;
j) изменений в силе с течением времени;
k) изменений в крутящем моменте с течением времени; и
l) пикового крутящего момента.
В общем случае электронное обрабатывающее устройство служит для:
a) по меньшей мере частичного сравнения сигналов и опорных данных; и
b) формирования показателя в соответствии с результатами сравнения.
В общем случае опорные данные включают в себя по меньшей мере одно из:
a) переносимости, которую определяют по нормальной популяции;
b) заданного диапазона;
c) заданного опорного значения;
d) ранее сформированного показателя; и
e) показателя, который сформировали для другой ноги.
В общем случае показатель указывает на:
a) по меньшей мере частично сигналы и опорные данные; и
b) разность по меньшей мере частично между сигналами и опорными данными.
В общем случае устройство содержит средство вывода для представления по меньшей мере показателя пользователю.
В общем случае средство вывода представляет собой по меньшей мере одно из:
a) светоизлучающего диода (LED);
b) элемента формирования звука;
c) цифрового дисплея; и
d) элемента, передающего электронный сигнал.
В общем случае средство вывода формирует по меньшей мере одно из:
a) света;
b) звука;
c) по меньшей мере одного буквенно-цифрового символа;
d) графика;
e) изображения;
f) беспроводного электронного сигнала; и
g) проводного электронного сигнала.
В общем случае устройство содержит средство ввода, тем самым позволяя пользователю вводить данные.
В общем случае средство ввода содержит по меньшей мере одно из:
a) клавишной панели;
b) клавиатуры;
c) сенсорного экрана;
d) кнопки; и
e) переключателя.
В общем случае опора удлинена, и на ней на первом конце предусмотрены фиксирующие элементы, а второй конец несет вес субъекта.
В общем случае датчик включает в себя одно из:
a) весового датчика;
b) силовой пластины;
c) пьезорезистивного силового датчика;
d) тензодатчика; и
e) гидравлического датчика давления.
В общем случае датчик измеряет одно из силы сжатия и силы натяжения.
В общем случае фиксирующие элементы включают в себя одно из:
a) ремешка;
b) манжеты; и
c) стяжки.
В общем случае датчик измеряет силу, указывающую на силу мышц задней поверхности бедра по меньшей мере на одной ноге субъекта, когда субъект выполняет упражнение на подъем тела, лежа на животе, с помощью мышц задней поверхности бедра.
В общем случае по меньшей мере одна мышца-сгибатель колена включает в себя по меньшей мере мышцу задней поверхности бедра.
Во второй расширенной форме настоящее изобретение направлено на создание устройства для использования при оценке силы мышц субъекта, причем устройство содержит:
a) опору;
b) два фиксирующих элемента, причем каждый фиксирующий элемент ограничивает движение соответствующей голени субъекта относительно опоры; и,
c) по меньшей мере один датчик, который при использовании измеряет силу, указывающую на силу мышц, когда субъект выполняет упражнение на мышцу, упражнение прикладывает по меньшей мере некоторую силу к датчику.
В третьей расширенной форме настоящее изобретение направлено на создание способа оценки силы мышц задней поверхности бедра субъекта с использованием устройства, содержащего опору, два фиксирующих элемента и по меньшей мере один датчик, причем способ содержит:
a) фиксацию двух голеней субъекта с использованием соответствующих фиксирующих элементов, в положении, которое при использовании по существу фиксировано относительно опоры;
b) измерение силы, указывающую на силу по меньшей мере одной мышцы-сгибателя колена по меньшей мере на одной ноге субъекта, с использованием датчика, когда субъект выполняет эксцентрическое сокращение по меньшей мере мышц задней поверхности бедра.
В общем случае по меньшей мере один датчик включает в себя два датчика, каждый датчик соединяют с соответствующим фиксирующим элементом, и способ содержит измерение силы, указывающую на силу по меньшей мере одной мышцы-сгибателя колена на каждой ноге субъекта.
В общем случае способ содержит измерение силы, указывающей на силу по меньшей мере одной мышцы-сгибателя колена, одновременно на каждой ноге субъекта.
В общем случае способ содержит измерение силы, указывающей на силу мышц задней поверхности бедра по меньшей мере на одной ноге субъекта, когда выполняет упражнение на подъем тела, лежа на животе, с помощью мышц задней поверхности бедра.
В общем случае способ содержит электронное обрабатывающее устройство, причем способ содержит:
a) отслеживание сигналов от по меньшей мере одного датчика; и
b) формирование по меньшей мере частично с использованием сигналов показателя, указывающего на силу мышц задней поверхности бедра по меньшей мере для мышц задней поверхности бедра.
В общем случае способ содержит:
a) сравнение по меньшей мере частично сигналов и опорных данных; и
b) формирование показателя в соответствии с результатами сравнения.
В общем случае способ содержит представление по меньшей мере показателя пользователю на средстве вывода.
Краткое описание чертежей
Далее пример настоящего изобретения описан со ссылкой на сопровождающие чертежи, на которых:
на фиг. 1A-1C представлены схематические рисунки вида сверху, сбоку и в перспективе для первого пример устройства для использования при оценке силы сгибателя колена субъекта;
на фиг. 1D-1F представлены схематические рисунки первого примера субъекта, выполняющего эксцентрическое сокращение по меньшей мере сгибателя колена с использованием устройства;
на фиг. 2A-2E представлены схематические изображения множества примеров опоры;
на фиг. 3A представлено схематическое изображение примера фиксирующего элемента и датчика;
на фиг. 3B представлено схематическое изображение дополнительного примера фиксирующего элемента;
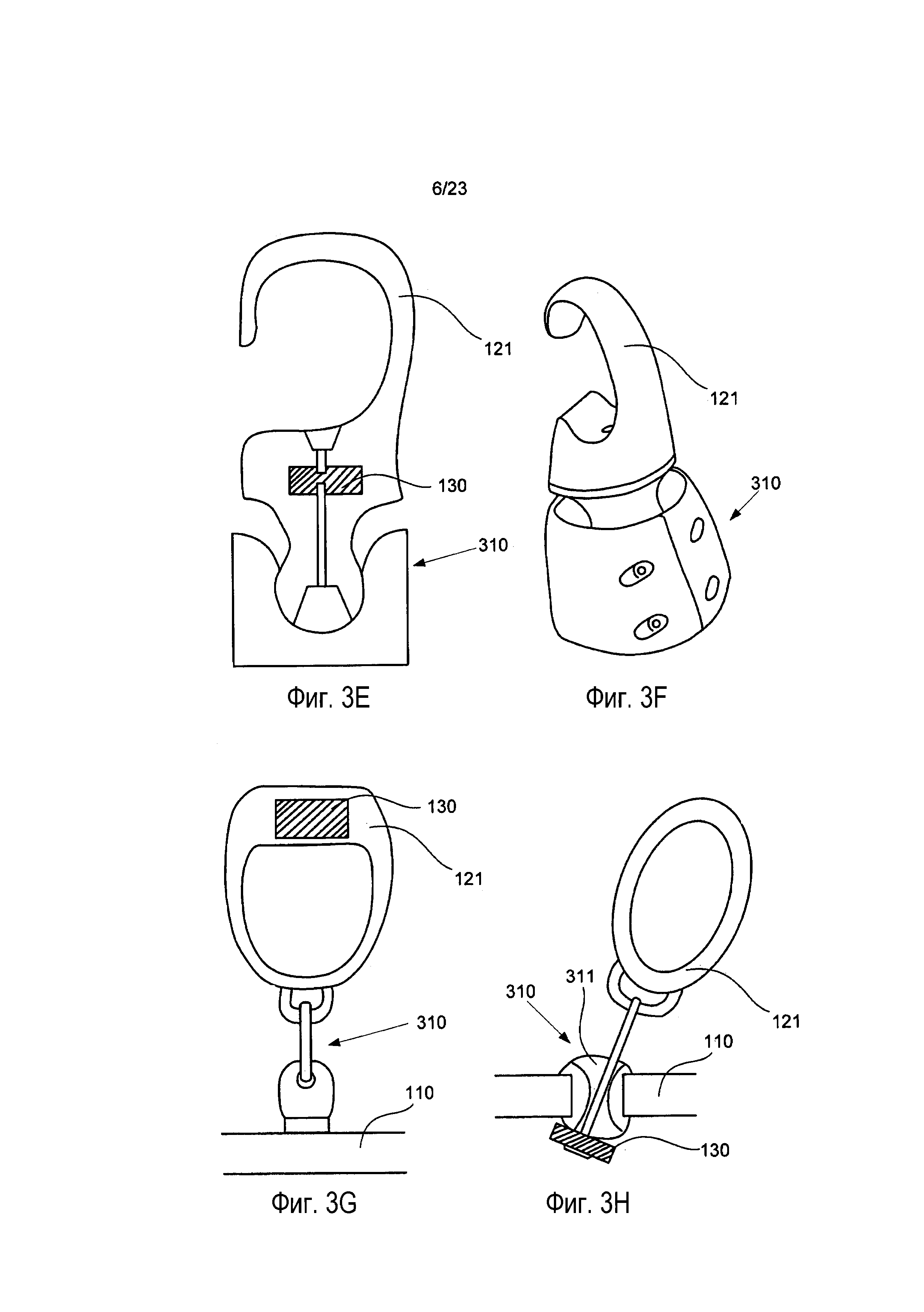
на фиг. 3C-3F представлены схематические изображения дополнительных примеров фиксирующего элемента и датчика, включая подвижное сочленение;
на фиг. 3G и 3H представлены схематические изображения дополнительных примеров фиксирующего элемента и датчика;
на фиг. 4A и 4B представлены схематические изображения вида сборку и вида снизу вверх второго примера устройства для использования при оценке силы сгибателя колена субъекта, включая удлинительную часть;
на фиг. 4C и 4D представлены схематические изображения третьего примера устройства, включая фиксирующие элементы, подвижно установленные на опоре;
на фиг. 4E-4G представлены схематические изображения четвертого, пятого и шестого примера устройства для использования при оценке силы сгибателя колена субъекта, включая удлинительную часть;
на фиг. 4H представлено схематическое изображение седьмого примера устройства для использования при оценке силы сгибателя колена субъекта, включая две удлинительные части;
на фиг. 5A и 5B представлены схематические изображения вида сбоку восьмого примера устройства для использования при оценке силы сгибателя колена субъекта, включая корректируемый угловой элемент;
на фиг. 5C представлено схематическое изображение дополнительного вида в перспективе восьмого примера устройства для использования при оценке силы сгибателя колена субъекта, включая корректируемый угловой элемент;
на фиг. 6A и 6B представлены схематические изображения девятого примера устройства для использования при оценке силы сгибателя колена субъекта, устройство содержит шарнирно соединенную удлинительную часть;
на фиг. 6C представлены схематические изображения дополнительного примера устройства для использования при оценке силы сгибателя колена субъекта, устройство содержит шарнирно соединенную удлинительную часть;
на фиг. 7A и 7B представлены схематические изображения десятого примера устройства для использования при оценке силы сгибателя колена субъекта, устройство содержит съемные ножки;
на фиг. 8A и 8B представлены схематические изображения одиннадцатого примера устройства для использования при оценке силы сгибателя колена субъекта, устройство содержит поднятую опору;
на фиг. 9A-9G представлены схематические изображения двенадцатого - семнадцатого примеров устройства для использования при оценке силы сгибателя колена субъекта, устройство содержит независимо корректируемые опоры;
на фиг. 10A, 10B и 10C представлены схематические изображения восемнадцатого - двадцатого примеров устройства для использования при оценке силы сгибателя колена субъекта, устройство содержит угловой датчик;
на фиг. 11 представлено схематическое изображение примера электронного обрабатывающего устройства; и,
на фиг. 12 представлена блок-схема второго примера способа оценки силы сгибателя колена субъекта; и,
на фиг. 13A-13C представлены графики силы, угла и угловой скорости, измеренных для субъекта, выполняющего эксцентрическое сокращение сгибателя колена.
Осуществление изобретения
Пример устройства для использования при оценке силы по меньшей мере одной мышцы-сгибателя колена субъекта далее описан со ссылкой на фиг. 1A-1F.
В этом примере устройство 100 содержит опору 110 и два фиксирующих элемента 121, 122, которые при использовании фиксируют соответствующую голень субъекта S в положении, которое по существу фиксировано относительно опоры 110.
Устройство 100, кроме того, содержит два датчика 130.1, 130.2 которые при использовании измеряют силу, указывающую на силу по меньшей мере одной мышцы-сгибателя колена на одной или обеих ногах субъекта S, когда субъект S выполняет эксцентрическое сокращение по меньшей мере одной мышцы-сгибателя колена.
Следует отметить, что мышцы-сгибатели колена в общем включают в себя три основные мышцы задней поверхности бедра, полусухожильную, полуперепончатую мышцы и бицепс бедра, а также второстепенные сгибатели колена, портняжную, икроножную и тонкую мышцы. Для простоты, следующее описание относится в первую очередь к измерению силы мышц задней поверхности бедра. Однако, следует принимать во внимание, что способы можно применять к измерению какой-либо одной или более из мышц-сгибателей колена и что упоминание о мышцах задней поверхности бедра не предполагают в качестве ограничения.
На фиг. 1D-1F представлен субъект S, который выполняет эксцентрическое сокращение по меньшей мере мышц задней поверхности бедра с использованием устройства 100. В связи с этим на фиг. 1D представлен субъект S в начальном положении на коленях перед началом сокращения, в котором голени субъекта зафиксированы с использованием соответствующих фиксирующих элементов 121, 122 в положении, которое при использовании по существу фиксировано относительно опоры. Субъект S впоследствии продолжает опускать свою верхнюю часть тела в направлении опоры 110 контролируемым образом, при этом по существу сохраняя выравнивание верхних частей ног или бедер и туловища, как показано на фиг. 1E. На фиг. 1F показано конечное положение, причем субъект S лежит на опоре 110 по существу на животе. Следует принимать во внимание, что вышеупомянутое эксцентрическое сокращение обычно называют «упражнением на подъем тела, лежа на животе, с помощью мышц задней поверхности бедра», «скандинавским сгибанием» или тому подобное.
Соответственно, описанная выше конфигурация предусматривает устройство 100 для использования при оценке силы мышц задней поверхности бедра субъекта S, при которой сила, прикладываемая на голени субъекта S, когда он выполняет эксцентрическое сокращение по меньшей мере мышц задней поверхности бедра, указывает на силу мышц задней поверхности бедра. В связи с этим, устройство 100 можно использовать для отслеживания силы мышц задней поверхности бедра, включая какие-либо изменения в силе мышц задней поверхности бедра с течением времени, например, для обнаружения предвестников повреждений, таких как различия силы во времени, дисбаланс между ногами в покое (т.е. без утомления) или в ответ на утомление, для отслеживания прогресса реабилитации, для отслеживания прогресса во время силовой тренировки, или для сравнения с популяцией. В качестве дополнения или альтернативы, устройство 100 также можно использовать для укрепления мышц задней поверхности бедра, например посредством выполнения повторений эксцентрического сокращения мышц задней поверхности бедра с использованием устройства 100 так, как показано на фиг. 1D-1F.
В общем случае силу мышц задней поверхности бедра оценивают с использованием большого, обычно расположенного в лаборатории изокинетического динамометра, который дорого стоит и требует высококвалифицированного персонала для наблюдения за процедурой оценки. В отличие от этого, устройство 100 можно легко изготавливать и, таким образом, стоимость изготовления остается низкой, что ведет к экономически эффективной конфигурации для оценки силы мышц задней поверхности бедра. Дополнительно устройство 100 позволяет технически не подготовленным пользователям легко и эффективно использовать устройство 100 и осуществлять отслеживание.
Кроме того, устройство 100 портативно и его можно легко транспортировать. Следует принимать во внимание, что портативность позволяет субъектам, таким как члены спортивной команды, легко транспортировать устройство 100 в поездке, на мероприятия и с них, на тренировки или тому подобное, в командном автобусе, самолете, поезде, машине или тому подобном. Кроме того, следует принимать во внимание, что устройство 100 также можно разделять на модули для повышения портативности. Соответственно, фиксирующие элементы 121, 122 и/или один или более датчиков 30.1, 130.2 могут быть предусмотрены отдельно от опоры 110 и/или друг от друга и могут легко собираться и разбираться. Однако этот признак не является существенным.
Также следует принимать во внимание, что устройство 100, содержащее два датчика 130.1, 130.2, делает возможной оценку силы мышц задней поверхности бедра мышц обеих задних поверхностей бедра субъекта S одновременно. Соответственно, датчики 130.1, 130.2 могут измерять силу, указывающую по меньшей мере на силу мышц задней поверхности бедра, на каждой ноге субъекта S одновременно. В связи с этим, оценку можно осуществлять за значительно меньшее время, чем в существующих способах, например, изокинетической динамометрии, которая ограничена оценкой мышц задней поверхности бедра противоположных ног в различные моменты времени. Также, по всей видимости, устройство обеспечивает увеличенную чувствительность и надежность для оценки дисбаланса сил между конечностями по сравнению с существующими способами. Это сокращает время, необходимое для оценки субъекта S, что позволяет оценке силы мышц задней поверхности бедра стать доступной целым спортивным командам в качестве части регулярных оценок здоровья и подготовки. В этом примере представлены два датчика 130.1, 130.2, однако это не является существенным и можно использовать любое число датчиков, включая один датчик для отслеживания силы на одной ноге, или в качестве альтернативы один датчик можно использовать для отслеживания комбинированной силы мышц задней поверхности бедра обеих ног.
В этом примере эксцентрическое сокращение по меньшей мере мышц задней поверхности бедра субъекта S представлено на фиг. 1D-1F, однако следует принимать во внимание, что можно осуществлять любое подходящее упражнение, которое содержит эксцентрическое сокращение мышц задней поверхности бедра. Например, бедро субъекта может быть расположено по-другому так, что эксцентрическое сокращение осуществляют со сгибанием бедра субъекта и торса вперед. Однако это не является существенным, и несмотря на то, что в этом примере устройство 100 предназначено для использования во время эксцентрического сокращения по меньшей мере мышц задней поверхности бедра субъекта S, следует принимать во внимание, что устройство 100 можно использовать для измерения других мышц или мышечных групп, при этом выполняя сокращения мышц других типов. Например, устройство 100 можно использовать для оценки любой подходящей мышцы или группы мышц, такой как сгибатель колена, сгибатель бедра, разгибатель колена, квадрицепс или тому подобное. В связи с этим, оценку можно формировать во время эксцентрического, изометрического или концентрического сокращения или тому подобное в соответствующей мышце или мышечной группе.
В дополнительном примере устройство 100 можно использовать при оценке силы мышц задней поверхности бедра, когда субъект S выполняет концентрическое сокращение по меньшей мере мышц задней поверхности бедра. Концентрическое сокращение мышц задней поверхности бедра может включать в себя то, что изначально субъект S находится по существу в положении лежа на животе, например, как показано на фиг. 1F, в котором голени субъекта фиксируют с использованием соответствующих фиксирующих элементов 121, 122 в положении, которое при использовании по существу фиксировано относительно опоры. Субъект S впоследствии продолжает поднимать верхнюю часть своего тела в направлении опоры 110 контролируемым образом, при этом по существу сохраняя выравнивание верхних частей ног или бедер и туловища, как показано на фиг. 1E. На фиг. 1D представлено конечное положение, в котором субъект S по существу стоит на коленях на опоре 110. Однако это упражнение не является существенным, и можно выполнять любое подходящее упражнение для оценки любой подходящей мышцы или мышечной группы.
Соответственно, приведенное выше предусматривает устройство 100 для использования при оценке силы мышц субъекта S, который содержит опору 110 и два фиксирующих элемента 121, 122, для ограничения движения соответствующей голени субъекта S относительно опоры 110. Устройство 100, кроме того, содержит один или более датчиков 130.1, 130.2, которые при использовании измеряют силу, указывающую на силу мышц, когда субъект S выполняет упражнение на мышцу, упражнение прикладывает по меньшей мере некоторую силу на датчик 130.1, 130.2.
Ниже описано множество дополнительных признаков.
В другом примере каждый датчик 130.1, 130.2 соединяют с соответствующим фиксирующим элементом 121, 122, который фиксирует лодыжки субъекта S относительно опоры 110, и, соответственно, сила, измеряемая на лодыжках, указывает на силу мышц задней поверхности бедра. Однако этот признак не является существенным, и следует принимать во внимание, что датчики 130.1, 130.2 могут измерять силу, которую прикладывают к какой-либо части голени, например под коленями субъекта S.
Кроме того, оценка силы мышц задней поверхности бедра может происходить во время одностороннего или двустороннего сокращения(й) мышц задней поверхности бедра(бедер). Например, во время двустороннего сокращения, два датчика 130.1, 130.2 можно использовать для измерения силы на каждой ноге субъекта одновременно или в различные моменты времени, или в качестве альтернативы один датчик 130.1, 130.2 можно использовать для измерения силы на обеих ногах или одной из них. Во время одностороннего сокращения устройство может содержать один датчик 130.1, 130.2, который можно менять между голенями субъекта, посредством изменения положения датчика 130.1, 130.2 и/или фиксирующих элементов 121, 122 и/или субъекта S относительно опоры 110 так, что силу мышц задней поверхности бедра на обеих ногах можно оценивать последовательно. Однако этот признак не является существенным.
Следует принимать во внимание, что устройство 100 можно использовать для оценки силы мышц задней поверхности бедра, включая оценку дисбаланс между ногами, утомление (или утомляемость), улучшение, реабилитацию, сравнение или тому подобное, и это рассмотрено более подробно далее. Кроме того, устройство 100 можно использовать в сочетании с другим диагностическим, экспериментальным или дополняющим оборудованием или процедурами, например, электромиографией (EMG) для оценки электрической активности скелетных мышц или тому подобное, однако это не является существенным.
В качестве дополнения или альтернативы, устройство 100 можно использовать для укрепления мышц, например, посредством повторного выполнения субъектом S эксцентрического сокращения по меньшей мере мышц задней поверхности бедра с использованием устройства 100.
В одном из примеров опора 110 удлинена, а фиксирующие элементы 121, 122 предусмотрены на первом конце, а второй конец несет вес субъекта S. Однако это не является существенным, и опора 110 может иметь любую подходящую геометрическую форму, как рассмотрено более подробно ниже.
Множество дополнительных примеров опоры 110 приведено на фиг. 2A-2D. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
На фиг. 2A-2E представлены дополнительные примеры опоры 110. На фиг. 2A опора дополнительно содержит два фиксирующих элемента 121, 122 для фиксации соответствующей голени субъекта S в положении, которое при использовании по существу фиксировано относительно опоры 110. Один или более датчиков 130.1, 130.2 не показаны. На фиг. 2B-2D, фиксирующие элементы 121, 122 и один или более датчиков 130.1, 130.2 не показаны.
В связи с этим, опора 110 может иметь любую подходящую геометрическую форму, включая овальную, круглую, многоугольную, квадратную, прямоугольную, эргономичную или тому подобное. Кроме того, опора 110 может состоять из любого подходящего материала, такого как древесина, древесно-волокнистая плита средней плотности (MDF), пластмасса, стекловолокно, полимер, армированный углеродным волокном (CFRP), алюминий или тому подобное, чтобы выдерживать вес по меньшей мере части субъекта S.
На фиг. 2E опора 110 содержит такой ступенчатый профиль, что коленная опора 201 предусмотрена на верхней части опоры 110, а датчики 130.1, 130.2 соединяют с нижней частью опоры 100. Следует принимать во внимание, что это позволяет располагать голени субъекта S по существу параллельно опоре 110, когда каждый фиксирующий элемент 121, 122 фиксирует соответствующую голень субъекта S в положении, которое при использовании по существу фиксировано относительно опоры 110. Однако этот признак не является существенным, и опора может содержать любой подходящий профиль, включая профиль, который является однородным, размеченным или тому подобное.
Также следует принимать во внимание, что хотя показана одна цельная опора, это только для простоты иллюстрации, и что на практике опору можно формировать из множества элементов опоры, которые могут быть или могут не быть соединены. В одном из примеров, опора может содержать два параллельных элемента опоры, каждый из которых предназначен для соединения с соответствующим фиксирующим элементом.
В этих примерах каждая опора 110 содержит одну или более коленных опор 201, 202, которые несут одно или более коленей субъекта S и которые при использовании защищают колени субъекта от повреждения, травмы, боли или тому подобного. Соответственно, коленные опоры 201, 202 могут состоять из любого подходящего материала, включая вспененный материал, резину, ткань или тому подобное.
Следует принимать во внимание, что коленные опоры 201, 202 можно подвижно устанавливать на опору 110. Субъекты S различных размеров и, в частности, различного роста должны демонстрировать различия в расстоянии между их коленями и соответствующими голенями, на которых фиксируют фиксирующие элементы 121, 122. Таким образом, коленные опоры 201, 202 можно подвижно устанавливать, например, для коррекции расстояния до фиксирующих элементов 121, 122, расстояния между соответствующими коленными опорами 201, 202, угла коленных опор 201, 202 или тому подобного, в соответствии с требованиями конкретного субъекта S. Соответственно, подвижное крепление может включать в себя любое подходящее крепление, такое как направляющие рельсы, полужесткие крепления или тому подобное. Однако этот признак не является существенным, и в качестве альтернативы профессиональные спортсмены могут иметь индивидуальное устройство 100, или коленные опоры 201, 202 могут иметь достаточные размеры для приспособления к ряду субъектов S различных размеров.
Множество дополнительных примеров фиксирующих элементов 121, 122 представлено на фиг. 3A-3H. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
На фиг. 3A представлен пример фиксирующего элемента 121, соединенным с датчиком 130. В связи с этим соединение содержит «C»-образный элемент 321 и фиксирующее средство 322, например, болт, винт, гвоздь или тому подобное, однако следует принимать во внимание, что можно использовать любое подходящее соединение. Кроме того, фиксирующий элемент 121 содержит отсоединяемую манжету, содержащую такую застежку, такую как Velcro™, кнопки, застежка-молния или тому подобное, что манжета вмещает голень субъекта S, однако можно использовать любой подходящий фиксирующий элемент 121, как рассмотрено более подробно ниже.
На фиг. 3B представлен дополнительный пример фиксирующего элемента 121, включая гибкое и/или дугообразное тело. Следует принимать во внимание, что в этом примере, фиксирующий элемент прикрепляют к датчику 130, как показано на фиг. 3C, с использованием одного или более соединений, которые при использовании позволяют субъекту S помещать его голень непосредственно через тело и/или требуют разъединения/соединения по меньшей мере одного соединения. Однако следует принимать во внимание, что этот признак не является существенным, и можно использовать любой подходящий фиксирующий элемент 121, например, манжету, стяжку, ремешок, полужесткий «C»-образный элемент, например, как показано на фиг. 3E и 3F, который предусматривает легкую фиксацию и освобождение голени или тому подобное.
На фиг. 3C-3F представлены четыре примера фиксирующего элемента 121, соединенного с датчиком 130. Стоит принимать во внимание, что этого можно достигать с использованием любых подходящих средств, включая «D»-образный элемент 321, как показано на фиг. 3C, или «C»-образный элемент 321, как показано на фиг. 3D, и фиксирующего средства 322. В качестве альтернативы, датчик 130 может содержаться в фиксирующем элементе 121, как показано на фиг. 3E и 3F, или фиксирующий элемент 121 может быть непосредственно соединен с датчиком 130 или может быть соединен посредством стяжки, винта, болта, клея или тому подобного. Также следует принимать во внимание, что конфигурация на фиг. 3E и 3F может позволять датчику измерять одно из силы сжатия и силы натяжения или обе этих силы, например, в зависимости от выполняемого упражнения. Однако этот признак не является существенным.
В этих примерах датчик 130 включает в себя любой подходящий датчик, включая весовой датчик, силовую пластину, пьезорезистивный силовой датчик, тензодатчик, гидравлический датчик давления или тому подобное. Кроме того, датчик 130 может измерять или силу сжатия или силу натяжения, и в связи с этим расположение датчика 130 будет зависеть от типа измеряемой силы, например при восприятии силы натяжения датчик можно размещать между опорой 110 и фиксирующим элементом 121.
На фиг. 3C-3F дополнительно представлено подвижное сочленение 310, которое позволяет поворачивать датчик 130 относительно опоры 110. Следует принимать во внимание, что некоторые датчики 130, например, весовые датчики конкретных типов, измеряют силу в одном направлении, таким образом подвижное сочленение 310 позволяет выравнивать датчик таким образом, чтобы направление измерения было по существу параллельно прикладываемой силе. Соответственно, это позволяет датчику 130 измерять полную силу, указывающую по меньшей мере на силу мышц задней поверхности бедра по меньшей мере на одной ноге, вместо ее вертикальной компоненты.
На фиг. 3C-3F подвижное сочленение 310 содержит шаровой шарнир, в котором шар соединен с опорой 110, а гнездо соединено с датчиком 130, таким образом обеспечивая датчику 130 свободу поворота относительно опоры 110. Однако следует принимать во внимание, что можно использовать какое-либо подвижное сочленение 310, включая шарнир, стяжку, цепь, трос, гибкий кабель, ремешок или тому подобное. Также следует принимать во внимание, что признак не является существенным.
На фиг. 3G и 3H представлены два дополнительных примера фиксирующего элемента 121, датчика 130 и подвижного сочленения 310. На фиг. 3G определенная сторона фиксирующего элемента 121 соединена с опорой 110, а датчик 130 включен в фиксирующий элемент 121 на противоположной стороне с тем, чтобы датчик 130 измерял сжимающую силу, когда голень субъекта S удаляют от опоры 110.
На фиг. 3H фиксирующий элемент 121 соединен с датчиком 130 через отверстие 311, предусмотренное в опоре 110. В связи с этим, датчик предусмотрен на противоположной стороне опоры 110 относительно фиксирующего элемента 121 и таким образом выполнен с возможностью измерения сжимающей силы, когда голень субъекта S удаляют от опоры 110. Следует принимать во внимание, что отверстие 311 может иметь любую подходящую геометрическую форму, и в этом примере оно предусмотрено для обеспечения подвижности подвижного сочленения 310.
Другое примерное устройство 100 для использования при оценке силы мышц задней поверхности бедра субъекта S представлен на фиг. 4A-4H. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
На фиг. 4A и 4B представлено второе устройство 400 для использования при оценке силы мышц задней поверхности бедра субъекта, который содержит опору 110, фиксирующие элементы 122, датчики 130, соединенные с подвижным сочленением 310, и коленную опору 201.
Устройство, кроме того, содержит удлинительную часть 430, которая содержит опору 401 верхней части тела для поддержки по меньшей мере части верхней части тела субъекта S, когда субъект выполняет по меньшей мере часть эксцентрического сокращения, например, как показано на фиг. 1F. В связи с этим, опора 401 верхней части тела может состоять из любого подходящего материала, например, вспененного материала, резины, ткани или тому подобное. В этом примере удлинительная часть 430 соединена с опорой 110 с использованием петель 411 и 412, однако следует принимать во внимание, что можно использовать любую подходящую форму соединения, например удлинительная часть может быть предусмотрена в виде отдельной детали, которую можно разъемно соединять с опорой 110, или в такой скользящей конфигурации, что удлинительная часть помещается внутри или под опорой 110 и скользя выдвигается оттуда.
Соответственно, устройство 400 может быть предусмотрено в собранном состоянии, с полностью выдвинутой удлинительной частью 430, например, как показано на фиг. 4A-4E, и это делает возможными дополнительный комфорт, стабильность и опору для субъекта при выполнении эксцентрического сокращения. Кроме того, в разобранном состоянии, в котором выдвинутую часть удаляют, вдвигают в опору 110 или под нее, складывают с опорой 110 с использованием шарниров или тому подобное, устройство 400 становится более управляемым во время транспортировки и хранения, и, таким образом, возрастает портативность. В качестве альтернативы, удлинительную часть 430 можно обеспечить в навсегда собранном положении, или в качестве отдельной части по отношению к опоре 110 или как образующую с опорой 110 единое целое.
В этом примере, следует принимать во внимание, что дополнительно один или более фиксирующих элементов 121, 122 можно соединять с опорой 110. Однако этот признак не является существенным.
Фиг. 4C и 4D содержат третий пример устройства 400, в котором признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций, и они не будут снова рассмотрены здесь. Следует принимать во внимание, что фиксирующие элементы 121, 122 можно подвижно устанавливать на опору 110 так, что их положение и/или угол относительно опоры 110 можно корректировать для адаптации к сокращению конкретной мышцы или к конкретному субъекту S, включая различных субъектов с различными длинами ног, различными ширинами бедер или тому подобное, или для асимметричного расположения фиксирующих элементов 121, 122 для асимметричного распределения максимальной способности формировать силу среди мышц задней поверхности бедра. В этом примере фиксирующие элементы 121, 122 можно подвижно устанавливать так, что расстояние между фиксирующими элементами 121, 122 можно корректировать. Кроме того, подвижные части 453, 454 устанавливают подвижно на опору 110 с использованием вторых направляющих элементов 451, 452, так, что расстояние между фиксирующими элементами 121, 122 и коленной опорой 201 можно корректировать.
Следует принимать во внимание, что можно использовать другие подвижные установочные узлы, например, первые направляющие элементы 455, 456 можно использовать для коррекции расстояния между фиксирующими элементами 121, 122 и коленной опорой 201, а вторые направляющие элементы 451, 452 для коррекции расстояния между фиксирующими элементами 121, 122. В качестве альтернативы, подвижные части 453, 454 могут отсутствовать, так что устройство 400 содержит только вторые направляющие элементы 451, 452, на которых можно корректировать расстояние между фиксирующими элементами 121, 122 или фиксирующими элементами 121, 122 и коленной опорой 201. Кроме того, следует принимать во внимание, что можно использовать любые подходящие первые и вторые направляющие элементы, включая направляющие рельсы, штыри и отверстия для штырей или тому подобное. Однако этот признак не является существенным.
Фиг. 4E-4H содержат четвертый - седьмой примеры, соответственно, устройства 400, в которых признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций, и они не будут рассмотрены здесь снова.
На фиг. 4F и 4H представлено устройство 400, который дополнительно содержит такое отверстие 420 в опоре 110, что отверстие обеспечивает, например, ручку для простого расширения или прикрепления удлинительной части(ей) и/или простой транспортировки устройства 400, или тому подобное. Однако этот признак не является существенным.
Кроме того, на фиг. 4H представлено устройство 400, которое содержит две удлинительные части 430.1, 430.2, и следует принимать во внимание, что этот признак может повышать портативность устройства 400 посредством снижения веса. Кроме того, две удлинительные части 430.1, 430.2 допускают независимое расположение, и это описано более подробно далее.
Восьмое примерное устройство 500 для использования при оценке силы мышц задней поверхности бедра субъекта S представлен на фиг. 5A-5C. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
На фиг. 5A и 5B представлена опора 110 и удлинительная часть 430, которая содержит корректируемый угловой элемент 510, 511. В связи с этим, корректируемый угловой элемент 510, 511 позволяет располагать опору 110 и удлинительную часть 430 под желаемым углом, тем самым делая возможным начальное положение непосредственно перед началом эксцентрического сокращения по меньшей мере мышц задней поверхности бедра, например, как показано на фиг. 1D, под желаемым углом наклона. Следует принимать во внимание, что этот угол полезен для осуществления одностороннего упражнения, поскольку наклон может снижать силу, необходимую для поддержки пользователя во время упражнения.
На фиг. 5C представлен пример устройства 500 для использования при оценке силы мышц задней поверхности бедра субъекта, который содержит опору 110, два фиксирующих элемента 121, 122, один или более датчиков 130.1, 130.2, соединенных с фиксирующими элементами 121, 122, и коленную опору 201, которая при использовании поддерживает колено субъекта S.
В этом примере устройство 500 содержит две удлинительные части 430.1, 430.2, включая опору 401 верхней части тела. Следует принимать во внимание, что дополнительные удлинительные части 430.1, 430.2 могут вмещать большого субъекта S, обеспечивать дополнительную опору для предотвращения нежелательного движения устройства 500 и/или уменьшения площади у основания разобранного устройства 500, таким образом увеличивая портативность. В связи с этим, опора 110 и удлинительные части 430.1, 430.2 шарнирно соединены посредством петель 411, 412, однако следует принимать во внимание, что можно использовать любое подходящее гибкое соединение.
Кроме того, устройство 500 на фиг. 5C содержит такой элемент 510 корректировки угла, что опору 110 и удлинительную часть 430 можно располагать под желаемым углом, как рассмотрено выше.
Девятое примерное устройство 600 для использования при оценке силы мышц задней поверхности бедра субъекта S представлен на фиг. 6A-6C. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
Соответственно устройство 600 содержит опору 110 и удлинительную часть 430, шарнирно соединенные через петли 411, 412, и это различие в конфигурации главным образом является эстетическим. В примере на фиг. 6C, удлинительную часть 430 можно фиксировать под каким-либо одним из множества углов. В связи с этим могут быть предусмотрены один или более элементов 621, 622 корректировки угла для фиксации опоры 110 и удлинительной части 430 под желаемым углом. Следует принимать во внимание, что желаемый угол может представлять собой любой подходящий угол, такой как угол между опорой 110 и удлинительной частью 430, угол между опорой 110 и горизонтальной плоскостью, угол между опорой 110 и вертикальной плоскостью, или тому подобное.
Кроме того, на устройстве 600 может быть предусмотрено множество отметок 630, которые обеспечивают указание желаемого угла, под которым можно зафиксировать по меньшей мере часть устройства 600. Например, опорные точки на нижней стороне удлинительной части 430 могут соответствовать соответствующим пометкам 630 для указания желаемого угла, когда элемент 621, 622 корректировки угла фиксируют в опорной точке, например, с использованием крюка, штыря или тому подобного. Однако этот признак не является существенным.
На фиг. 7A и 7B представлен десятый примерное устройство 700 для использования при оценке силы мышц задней поверхности бедра субъекта S. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
В этом примере устройство 700 дополнительно содержит две или более съемные ножки 731, 732, которые можно перемещать и/или поворачивать относительно опоры 110 для обеспечения опоры 110 под множеством различных углов. В связи с этим, на фиг. 7A этого примера представлено устройство 700 с двумя или более ножками 731, 732, зацепленными так, что опора 110 находится по существу горизонтально, и на фиг. 7B этого примера представлена первая нога 732, так зацепленная по-другому, что опора 110 более не является по существу горизонтальной. В связи с этим, следует принимать во внимание, что различные конфигурации подвижных ножек 731, 732 могут обеспечивать опору 110 под множеством различных углов. Однако этот признак не является существенным, и устройство 700 может быть предусмотрено без съемных ножек 731, 732.
На фиг. 8A и 8B представлено одиннадцатое примерное устройство 800 для использования при оценке силы мышц задней поверхности бедра субъекта S. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
В этом примере устройство 800 содержит поднятую опору 810 и два элемента корректировки угла, однако следует принимать во внимание, что можно использовать любое число элементов корректировки угла. Соответственно, элементы корректировки угла содержат поворотно соединенный удлиненный элемент 821, 822, который содержит упор 831, 832, который входит в зацепление с одним из множества зубцов 811, 812 для фиксации опоры 110 и/или удлинительной части 430 под желаемым углом. В связи с этим опору 110 и удлинительную часть 430 можно корректировать под желаемым углом вокруг точки 840 вращения.
Как рассмотрено выше, корректировка положения опоры 110 и/или удлинительной части 430 конфигурирует устройство 800 для различных размеров субъекта S, устойчивости устройства 800 и/или различной нагрузки мышц задней поверхности бедра во время эксцентрического сокращения, выполняемого субъектом S.
На фиг. 9A-9G представлены двенадцатый - семнадцатый примеры устройства 900 для использования при оценке силы мышц задней поверхности бедра субъекта S. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
В этом примере устройство 900 содержит одну или более опор 910.1, 910.2, которые являются независимо подвижными так, что опоры 910.1, 910.2 можно располагать по-другому, таким образом поддерживая соответствующие голени субъекта в различных соответствующих положениях и/или под различными соответствующими углами. Соответственно, когда субъект S выполняет эксцентрическое сокращение, каждая нога будет двигаться по-разному, и это будет влиять на максимальную способность формировать силу каждой мышцы задней поверхности бедра, таким образом устройство 900 может быть выполнено с возможностью заставлять одни мышцы задней поверхности бедра субъекта S прикладывать большую или меньшую силу, чем другие мышцы задней поверхности бедра.
Следует принимать во внимание, что это обеспечивает определенные преимущества, в том числе во время реабилитации может быть предпочтительно снижать или увеличивать нагрузку на восстанавливающиеся мышцы задней поверхности бедра. В качестве альтернативы, может быть необходимо оценить силу мышц задней поверхности бедра на каждой ноге в диапазоне различных нагрузок и, таким образом, углов и/или положений. Однако этот признак не является существенным.
В двенадцатом примере на фиг. 9A две удлинительные части 430.1, 430.2 шарнирно соединены с соответствующими опорами 910.1, 910.2, так что их можно независимо корректировать и фиксировать под желаемым углом с использованием любой подходящей конфигурации, такой как описано выше со ссылкой на предыдущие примеры.
На фиг. 9B представлен тринадцатый пример устройства 900, который содержит корректируемый угловой элемент 930, поворотно соединенный в точке 931 вращения на соответствующей опоре 910.2 так, что опора 910.2 двигается вокруг точки 920 вращения и может быть зафиксирована с использованием корректируемого углового элемента 930 под желаемым углом.
Четырнадцатый пример устройства 900 представлен на фиг. 9C и содержит корректируемый угловой элемент 930, поворотно соединенный с точкой 931 вращения на соответствующей опоре 910.2 так, что опора 910.2 двигается вокруг точки 920 вращения и может быть зафиксирована с использованием корректируемого углового элемента 930 под желаемым углом. Соответственно, корректируемый угловой элемент 930 содержит упор 933, который может быть вмещен каким-либо одним из множества зубцов 932, предусмотренных на поднятой опоре 810.
Фиг. 9D содержит пятнадцатый пример устройства 900, который содержит корректируемый угловой элемент 930, поворотно соединенный в точке 931 вращения на соответствующей опоре 910.2 так, что опора 910.2 двигается вокруг точки 920 вращения и может быть зафиксирована с использованием корректируемого углового элемента 930 под желаемым углом. Соответственно, корректируемый угловой элемент 930 содержит множество таких зубцов 932, что какой-либо один из зубцов 932 может быть вмещен упором 933, предусмотренным на поднятой опоре 810.
В шестнадцатом примере, представленном на фиг. 9E и 9F, устройство 900 содержит корректируемые угловые элементы 935.1, 935.2, поворотно соединенные в точке 931.2 вращения на соответствующей опоре 910.1, 910.2 так, что опоры 910.2 двигаются вокруг точки 920 вращения и могут быть зафиксированы с использованием корректируемого углового элемента 935.1, 935.2 под желаемым углом. Соответственно, корректируемые угловые элементы 935.1, 935.2 можно использовать для фиксации соответствующих опор 910.1, 910.2 под желаемым углом с использованием соответствующего штыря 934.1, 934.2, который входит в зацепление с корректируемым угловым элементом и поднятой опорой 810.
На фиг. 9G представлен семнадцатый пример устройства 900, который содержит одну удлинительную часть 430 и две опоры 910.1, 910.2, у которых можно независимо корректировать положение и/или угол опор 910.1, 910.2. В связи с этим, опоры 910.1, 910.2 шарнирно соединены с удлинительной частью 430, и их можно фиксировать с использованием любой подходящей конфигурации, такой как описано выше со ссылкой на предыдущие примеры.
Дополнительные примеры устройства 1000 для использования при оценке силы мышц задней поверхности бедра субъекта S представлены на фиг. 10A-10C. Признакам, аналогичным признакам примерного устройства, описанного выше, присвоены соответствующие аналогичные номера ссылочных позиций.
Устройство 1000 содержит опору 110, два фиксирующих элемента 121, 122 для фиксации соответствующей голени субъекта S, один или более датчиков 130.1, 130.2 и одну или более коленных опор 201, которые при использовании поддерживают колено субъекта S.
Устройство 1000 дополнительно содержит угловой датчик для измерения угла колена субъекта. Эту информацию можно анализировать для обеспечения положения, угла, угловой скорости, углового ускорения субъекта или тому подобного при выполнении эксцентрического сокращения по меньшей мере мышц задней поверхности бедра. Следует принимать во внимание, что угловой датчик включает в себя любой подходящий узел, механизм или устройство. Например, на фиг. 10A угловой датчик содержит две боковые опоры 1010, в которых одна боковая опора содержит множество излучателей 1011, таких как светоизлучающие диоды (LED), инфракрасные (IR) излучатели или тому подобное. Опора на противоположной стороне содержит один или более угловых датчиков, включая фотодиоды, IR датчики или тому подобное. Следует принимать во внимание, что поскольку субъект S выполняет эксцентрическое сокращение, похожее на фиг. 1D-IF, туловище субъекта должно последовательно закрывать каждый излучатель от соответствующего углового датчика, таким образом делая возможной индикацию угла туловища субъекта, подлежащего определению.
На фиг. 10B узел углового датчика содержит любой подходящий механизм для определения угла коленного сустава субъекта, включая по меньшей мере один гониометр 1020, гироскоп, датчик ускорения, магнитометр, инфракрасный датчик или тому подобное.
На фиг. 10C представлен дополнительный пример углового датчика, включая один или более подвижных элементов 1030, которые при использовании отслеживают положение верхней части ноги пользователя. Соответственно, надлежащим образом расположенный датчик или преобразователь, например, на петле расположенный между подвижными элементами 1030 и опорой 110, может измерять сигнал, указывающий по меньшей мере на угол или угловую скорость подвижного элемента 1030.
В качестве дополнения или альтернативы, в этом примере подвижные элементы 1030 могут помогать субъекту S при возврате из положения лежа на животе, например, как показано на фиг. 1F, в положение на коленях, например, как показано на фиг. 1D. В связи с этим, подвижный элемент 1030 можно использовать для помощи субъекту S при выполнении концентрического сокращения по меньшей мере мышц задней поверхности бедра, как рассмотрено выше, или просто помощи субъекту S при возврате в начальное положение после эксцентрического сокращения по меньшей мере мышц задней поверхности бедра также, как рассмотрено выше. В связи с этим, подвижные элементы 1030 могут содержать любую подходящую конфигурацию для возврата в вертикальное положение, включая смещающий элемент, механический и/или электрический исполнительный механизм или тому подобное.
Следует принимать во внимание, что угловой датчик можно использовать для определения показателя угла и/или положения коленного сустава субъекта S, включая одно из абсолютного или относительного угла, угловой скорости, углового ускорения или тому подобного, или мгновенно в единицах времени на всем протяжении упражнения или усредненно с использованием подходящего среднего. Следует принимать во внимание, что индикацию угла можно впоследствии использовать для обеспечения дополнительных показателей или оценок, и это рассмотрено более подробно ниже.
Кроме того, расстояние, такое как расстояние между осью вращения колена субъекта и датчиком 130.1, 130.2 и/или фиксирующим элементом 121, 122 можно измерять с помощью углового датчика или какой-либо другой подходящей конфигурации, и можно использовать при формировании показателей или оценок, например, крутящего момента, как рассмотрено ниже. В качестве альтернативы, расстояние можно измерять вручную и вводить в электронное обрабатывающее устройство, и это также рассмотрено более подробно далее. Однако этот признак не является существенным.
При необходимости датчики 130.1, 130.2 могут быть соединены с устройством отслеживания или другим электронным обрабатывающим устройством, таким как система обработки, выполненная с возможностью отслеживания сигналов от одного или более датчиков 130.1, 130.2 и формирования по меньшей мере частично с использованием сигналов показателя, указывающего на силу мышц задней поверхности бедра для одной или более мышц задней поверхности бедра.
Система 1100 обработки выполнена с возможностью приема сигналов от одного или более датчиков 130.1, 130.2, и тогда или отображения соответствующего показателя, такого как индикация измеряемой силы, или в качестве альтернативы - передачи сигналов или данных, получаемых из них, на отдельное удаленное устройство для дополнительной обработки, анализа или отображения. Таким образом, следует принимать во внимание, что электронное обрабатывающее устройство может действовать или в качестве блока регистрации, или для получения и по меньшей мере частичного анализа или отображения результатов.
Соответственно, система 1100 обработки может содержать электронную систему или устройство обработки любой подходящей формы, которая способна принимать и интерпретировать или передавать сигналы от одного или более датчиков 130.1, 130.2. Пример системы обработки представлен на фиг. 11.
В этом примере система 1100 обработки содержит процессор 1110, память 1111, устройство 1112 ввода/вывода (I/O), такое как клавиатура и дисплей, и внешний интерфейс 1113, соединенные через шину 1114. Следует принимать во внимание, что устройство ввода/вывода дополнительно может содержать средство ввода, такое как клавиатура, клавишная панель, сенсорный экран, кнопка, переключатель или тому подобное, которые тем самым позволяют пользователю вводить данные. Внешний интерфейс 1113 используют для соединения системы 1100 обработки с периферическими устройствами, такими как средство 1120 вывода и один или более датчиков 130.1, 130.2, а также с такими устройствами, как коммуникационные сети, базы данных, другие запоминающие устройства или тому подобное. Несмотря на то что показан один внешний интерфейс, это только с целью примера, и на практике может быть предусмотрено множество интерфейсов с использованием различных способов (например, Ethernet, последовательный, USB, беспроводные (такие как Bluetooth®, Zigbee®, радиочастотные сети), мобильные сети или тому подобное). Также следует принимать во внимание, что в систему 1100 обработки можно встраивать дополнительные компоненты аппаратного обеспечения в зависимости от конкретной реализации.
Кроме того, следует принимать во внимание, что электронное обрабатывающее устройство 1100 может содержать любой подходящий источник питания (не показано), например, батарею, панель солнечной батареи или тому подобное, однако это не является существенным, и в качестве альтернативы электронное обрабатывающее устройство 1100 можно адаптировать для соединения с электросетью, сетью электропитания или тому подобным.
При использовании процессор 1110 исполняет инструкции в форме прикладного программного обеспечения, хранимого в памяти 1111 для обеспечения возможности интерпретации и при необходимости использования сигналов от одного или более датчиков 130.1, 130.2, например, для управления средством 1120 вывода. Соответственно, с целью последующего описания, следует принимать во внимание, что действия, выполняемые системой 1100 обработки, в общем случае осуществляют с помощью процессора 1110 под управлением инструкций, хранимых в памяти 1111, и, следовательно, это не описано ниже более подробно.
Соответственно, следует принимать во внимание, что систему обработки 1110 можно формировать из какой-либо соответственно запрограммированной системы обработки, такой как соответственно запрограммированный PC, интернет-терминал, портативный компьютер, карманный PC, планшетный PC, тонкий PC, iPad™, мобильный телефон, смартфон, PDA (персональный цифровой помощник) или другое коммуникационное устройство. Соответственно, процессор 1110 может представлять собой какую-либо форму электронного обрабатывающего устройства, такого как микропроцессор, процессор на микрокристалле, конфигурация логической схемы, встроенное программное обеспечение, при необходимости связанное с исполняющей логической схемой, такой как FPGA (программируемая пользователем вентильная матрица), или какое-либо другое электронное устройство, система или узел, способные взаимодействовать с одним или более датчиками 130.1, 130.2 и при необходимости со средством 1120 вывода.
Следует принимать во внимание, что устройство 100 дополнительно может содержать средство 1120 вывода для представления показателя пользователю. В связи с этим, средство 1120 вывода может содержать любой подходящий механизм, включая светоизлучающий диод (LED), элемент формирования звука, такой как громкоговоритель, или тому подобное, цифровой дисплей, такой как монитор или тому подобное, элемент, передающий электронный сигнал, такой как порт USB или Ethernet, беспроводной передатчик или тому подобное. Соответственно, следует принимать во внимание, что средство 1120 вывода может формировать одно или более из света, включая цветной свет, звука или тона, по меньшей мере одного буквенно-цифрового символа, графика, изображения, беспроводного электронного сигнала, проводного электронного сигнала или тому подобного.
Ниже описан пример способа оценки силы мышц задней поверхности бедра субъекта S. Способ включает в себя использование устройства 100, которое содержит опору 110, два фиксирующих элемента 121, 122 и один или более датчиков 130.1, 130.2.
Способ содержит фиксацию двух голеней субъекта S с использованием соответствующих фиксирующих элементов 121, 122 в положении, которое при использовании по существу фиксировано относительно опоры 110. Способ дополнительно содержит измерение силы, указывающей на по меньшей мере силу мышц задней поверхности бедра на одной или двух ногах субъекта S, с использованием датчика 130.1, 130.2, когда субъект S выполняет эксцентрическое сокращение по меньшей мере мышц задней поверхности бедра.
Дополнительный пример способа оценки силы мышц задней поверхности бедра субъекта S далее описан со ссылкой на фиг. 12. Способ включает в себя использование устройства 100, которое содержит опору 110, два фиксирующих элемента 121, 122 и один или более датчиков 130.1, 130.2.
Перед этапом 1210 фиксирующие элементы 121, 122 и одну или более факультативных коленных опор 201, можно корректировать и фиксировать в положении, подходящем под размеры и геометрическую форму субъекта S. Например, может требовать корректировки расстояние между фиксирующими элементами 121, 122 или расстояние между фиксирующими элементами 121, 122 и коленной опорой 201. Кроме того, опора 110 и/или удлинительная часть 430 может быть расположена под желаемым углом для различной оценки мышц одой или обеих задних поверхностей бедра субъекта S согласно какой-либо одной из конфигураций, описанных выше со ссылкой на предыдущие примеры. Однако эти этапы не являются существенными.
На этапе 1200 две голени субъекта S фиксируют с использованием соответствующих фиксирующих элементов 121, 122 в положении, которое при использовании по существу фиксировано относительно опоры 110. Соответственно, следует принимать во внимание, что на устройстве 100 могут быть предусмотрены дополнительные фиксирующие элементы 121, 122 для фиксации дополнительных частей голеней на устройстве 100, например, могут быть предусмотрены четыре фиксирующих элемента 121, 122 для фиксации соответствующих лодыжек и коленей субъекта S, однако этот признак не является существенным, и можно использовать только два фиксирующих элемента 121, 122.
На этапе 1210 отслеживают сигналы от одного или более датчиков 130.1, 130.2, когда субъект S выполняет по меньшей мере одно эксцентрическое сокращение по меньшей мере мышц задней поверхности бедра. В общем случае отслеживание сигналов осуществляют с использованием электронного обрабатывающего устройства, такого как система обработки, которая выполнена с возможностью приема и интерпретации сигналов. В одном из примеров два датчика 130.1, 130.2 соединяют с соответствующими фиксирующими элементами 121, 122 так, что датчики 130.1, 130.2 измеряют силу, указывающую по меньшей мере на силу мышц задней поверхности бедра на каждой ноге субъекта S, например, одновременно или в различные моменты времени. Кроме того, эксцентрическое сокращение по меньшей мере мышц задней поверхности бедра включает в себя любое подходящее упражнение, например, упражнение на подъем тела, лежа на животе, с помощью мышц задней поверхности бедра, описанное выше со ссылкой на фиг. 1D-1F.
При необходимости на этапе 1220 сигналы по меньшей мере частично сравнивают с опорными данными, которые включают в себя любые подходящие данные, как рассмотрено выше со ссылкой на фиг. 11.
На этапе 1230 показатель, который указывает на силу мышц задней поверхности бедра, формируют по меньшей мере частично из сигналов, и он включает в себя любой подходящий показатель, например, как описано выше со ссылкой на фиг. 11. В том случае, если при необходимости осуществляют этап 1220, показатель можно формировать в соответствии с результатами сравнения.
Кроме того, показатель можно формировать из среднего по меньшей мере частично на основании сигналов, полученных во время эксцентрического сокращения. Например, на этапе 1210 можно отслеживать сигналы от датчиков 130.1, 130.2, когда субъект выполняет множество эксцентрических сокращений, таким образом позволяя формировать показатель на этапе 1230 с использованием среднего по меньшей мере некоторых сигналов. При необходимости резко отклоняющиеся сигналы можно дополнительно отбрасывать, например, если субъект выполняет подход из шести эксцентрических сокращений на этапе 1210, показатель, формируемый на этапе 1230, может включать в себя среднее, которое определили по меньшей мере частично с использованием сигналов, соответствующих четырем эксцентрическим сокращениям, выполненным в середине подхода.
При необходимости на этапе 1240 показатель представляют пользователю на средстве 1120 вывода, например, как рассмотрено выше со ссылкой на фиг. 11.
Следует принимать во внимание, что показателем может быть то, что указывает на одно или более из мгновенной силы, средней силы, пиковой силы, мгновенного крутящего момента, среднего крутящего момента, пикового крутящего момента, импульса, работы, скорость развития силы и/или крутящего момента или тому подобное. Кроме того, показатель может быть двусторонним и, таким образом, указывать по меньшей мере на силу мышц задней поверхности бедра на обеих ногах, или односторонним и, таким образом, указывать по меньшей мере на силу мышц задней поверхности бедра на одной или каждой ноге субъекта S. Кроме того, показатель может содержать среднее, такое как совокупное средне, взвешенное средне, скользящее среднее, например, недельные или месячные средние или какое-либо другое подходящее среднее.
Однако можно формировать дополнительные показатели, указывающие на другие параметры, такие как положение коленного сустава, движение или тому подобное, как описано ниже.
Также могут быть включены единицы времени, например, по отношению к мгновенным показателям. В связи с этим, на фиг. 13A приведен пример показателя 1301, который содержит силу, указывающую по меньшей мере на силу мышц задней поверхности бедра в зависимости от единиц времени, на ноге субъекта S, когда субъект S выполняет эксцентрическое сокращение по меньшей мере мышц задней поверхности бедра.
На фиг. 13B и 13C приведены примеры положения 1202 коленного сустава и угловой скорости 1203 колена, соответственно, в зависимости от времени, которые можно обеспечивать в дополнение к показателю или использовать при его определении. В связи с этим, следует принимать во внимание, что положение 1202 коленного сустава и угловую скорость 1203 колена можно измерять с использованием любой подходящей конфигурации, например, конфигураций, рассмотренных в отношении фиг. 10A-10C.
В качестве дополнения или альтернативы, система обработки может сравнивать сигналы от по меньшей мере одного из одного или более датчиков 130.1, 130.2 и опорные данные, и формировать показатель в соответствии с результатами сравнения. В связи с этим, опорные данные могут включать в себя любые подходящие данные, например, переносимость, которую определяют по нормальной популяции, заданный диапазон, заданное опорное значение, ранее сформированный показатель и показатель, который сформировали для другой ноги.
Кроме того, показатель может указывать как на сигналы, так и при необходимости на опорные данные. Показатель может содержать графическое изображение сигналов рядом с популяционным опорным значением или с наложением на него, или ранее сформированный показатель от того же субъекта S и/или той же ноги. В качестве дополнения или альтернативы, показатель содержит разность, по меньшей мере частично между сигналами и опорными данными, например, количественное улучшение силы мышц задней поверхности бедра по ранее сформированному показателю или процентную разность в силе мышц задней поверхности бедра между ногами субъекта S. Кроме того, показатель может содержать соотношение по меньшей мере частично между сигналами и опорными данными, например, соотношение между силами мышц задней поверхности бедра соответствующих ног субъекта S или соотношение между силой мышц задней поверхности бедра и силой другой мышцы/мышечной группы, такой как сила квадрицепса(ов) или сила сгибателя(ей) бедра, субъекта S.
Соответственно, следует принимать во внимание, что показатель может обеспечивать указание дисбаланса силы мышц задней поверхности бедра между соответствующими ногами субъекта S, утомление или утомляемость мышц задней поверхности бедра, улучшение силы мышц задней поверхности бедра, например, во время реабилитации или индикацию сравнения, например, относительно общей популяции, или популяции профессиональных спортсменов, популяции спортсменов в аналогичных видах спорта или тому подобное. В связи с этим, показатель может указывать на анализ динамики субъекта S, однако этот признак не является существенным, и показатели можно передавать и сохранять на отдельном электронном обрабатывающем устройстве, способном выполнять анализ динамики.
Для демонстрации эффективности вышеупомянутого устройства 100 провели множество экспериментов, и они рассмотрены более подробно ниже. В связи с этим, использовали конфигурацию, аналогичную фиг. 1A-1C.
Эксперименты по надежности и достоверности
В исследовании принимали участие тридцать один рекреационно активный мужчина (22,46±2,33 года; 1,81±0,06 м; 80,52±8,48 кг), наиболее часто соревнующиеся в австралийском футболе, регби (лига, союз или тач), европейском футболе или спринте. Один участник исключен из исследования из-за постоянного изменения своего способа выполнения упражнения на подъем тела, лежа на животе, с помощью мышц задней поверхности бедра (NHE), между тренировками, в результате чего в анализе было всего тридцать участников. Из этих тридцати участников один индивидуум имел постоянные сложности при выполнении сокращений на изокинетическом динамометр и был исключен из корреляционного анализа. Все участники не имели никаких повреждений нижних конечностей и были полностью активны в выбранном ими виде спорта во время исследования. Все процедуры исследования одобрены в Комитете университета по вопросам этики при исследованиях на человеке. Участники давали информированное письменное согласие перед исследованием после того, как им объяснили все процедуры.
Все участники посещали лабораторию в трех различных случаях. Первую тренировку проводили в качестве ознакомительной тренировки для подготовки участников ко всем процедурам, подлежащим осуществлению на последующих тренировках, и для коррекции каких-либо методических ошибок во время выполнения NHE. Вторая тренировка включала в себя определение эксцентрической силы сгибателя колена с помощью изокинетической динамометрии (крутящий момент) и устройства 100 (сила). Последняя тренировка включала в себя оценку эксцентрической силы сгибателя колена только с помощью устройства 100 для обеспечения возможности определения надежности при повторении исследования.
После разминочного подхода с субмаксимальным двусторонним NHE участников просили выполнять два подхода по три максимальных двусторонних (обеими ногами) и односторонних (только одной ногой) NHE, в результате чего было всего четыре подхода и 12 сокращений на ногу. С учетом порядка исследования различных условий, двусторонние сокращения всегда выполняли перед односторонними сокращениями, причем порядок при одностороннем исследовании конечностей рандомизировали среди участников. Период отдыха между подходами составлял две минуты. Участников инструктировали постепенно нагибаться вперед как можно медленнее, при этом удерживая торс в нейтральном положении на всем протяжении (подобно фиг. 1D, 1E и 1F) когда исследователи давали вербальное ободрение на всем протяжении диапазона движения, чтобы обеспечивать максимальное усилие. По завершении фазы опускания участники медленно возвращались в положение стоя, чтобы подготовиться к следующему подходу. Для всех повторений исследователи осуществляли визуальное отслеживание способа, и отдельные повторения отбрасывали, если их не выполняли с использованием правильного способа.
Оценку эксцентрической силы сгибателя колена также осуществляли на динамометре Biodex Systems 3 (Biodex Medical Systems, Shirley, NY). Участники лежали на животе, бедра находились в нейтральном положении, причем латеральный надмыщелок бедренной кости тщательно выравнивали относительно точки вращения динамометра. Это положение выбирали для имитации длины мышц, которую имеют мышцы задней поверхности бедра во время NHE. Исследуемую ногу прикрепляли к рычагу динамометра с помощью ремешка Velcro™, и по бедру прикрепляли ограничители с подушкой, чтобы ограничить движение коленным суставом. Задавали диапазон движения при сгибании колена 5-90° (0° = полная экстензия колена) и осуществляли коррекцию по весу конечности. Три подхода по четыре субмаксимальных сокращения сгибателей колена осуществляли при +240°×с-1 в качестве разминки, чтобы подготовить участника к максимальному усилию в дальнейших подходах. Оценка эксцентрического крутящего момента состояла из двух подходов по три последовательных максимальных произвольных сокращения (MVC) сгибателей колена на скоростях 30°×с-1 и 120°×с-1 с отдыхом 60 секунд между подходами. Эти скорости выбирали, поскольку в пилотном исследовании идентифицировали эти угловые скорости, которые охватывают диапазон угловых скоростей коленного сустава во время конечной фазы NHE. Спортсмены получали вербальное ободрение от исследователей, чтобы гарантировать максимальное усилие на всем протяжении диапазона движения. По завершении каждого сокращения исследователи возвращали рычаг в положение стоя при подготовке к следующему повторению. Порядок исследования ног и скоростей рандомизировали.
Данные о силе для обеих конечностей во время NHE и данные о крутящем моменте и положении рычага во время изокинетической динамометрии переносили на компьютер на частоте 1 кГц через 16-битный регистрирующий блок PowerLab 26T AD (ADInstruments, New South Wales, Australia) и сохраняли для дальнейшего анализа. На устройстве 100, для обеих конечностей (левой/правой) и условий (двустороннее/одностороннее), определяли наибольшую силу для каждого сокращения и выражали максимальную способность формировать силу в виде среднего для пика из шести сокращений (средняя пиковая сила) и в виде одного наибольшего пика из шести сокращений (пиковая сила). Определяли максимальный крутящий момент динамометра в соответствии с экспериментальным устройством на двух изокинетических скоростях (30°×с-1/120°×с-1), однако только приведен только средний пиковый крутящий момент, поскольку авторы изобретения обнаружили, что это является более надежным способом, чем измерение одного пикового крутящего момента. Соотношение между силой конечности или крутящим моментом представлено в виде левая нога:правая нога для обоих устройств.
Весь статистический анализ осуществляли с использованием JMP® версии 10.0 (SAS Institute®, Inc). Среднее и соответствующее стандартное отклонение для всех силовых переменных от устройства 100 приведены для левой и правой конечностей и для соотношений между силами конечностей. Программу табличных расчетов авторства Hopkins «A new view of statistics» (2000) Internet Society for Sports Science www.sportsci.org/resource/stats.html (получено в ноябре 2010 г.) использовали для вычисления межклассовой корреляции (ICC), типичную ошибку (TE) и TE% в качестве коэффициента вариации (CV). Величину эффекта определяли по сравнениям исследования 1 и исследования 2 для оценки величины различия. Для надежности ожидали ES (средняя разность/обобщенное стандартное отклонение) <0,2. Также определяли наименьшее целесообразное изменение (SWC) (0,2×((стандартное отклонение в исследовании 1 + стандартное отклонение в тесте 2)/2). Двумерный корреляционный анализ использовали для оценки совокупной достоверности между обратными величинами измерениями силы от устройства 100 (зависимая переменная) и золотым стандартом изокинетического динамометра (независимая переменная).
Описательная статистика для всех силовых переменных, сформированных для устройства 100, для обоих исследований 1 и 2 представлена в таблице 1. Кроме того, величина различий между исследованием 1 и исследованием 2 говорила о величине эффекта. Одна переменная, двусторонняя пиковая сила на правой ноге, демонстрировала поддающуюся обнаружению разницу (величина эффекта ≥0,20), когда все другие переменные демонстрировали не поддающуюся обнаружению разницу (величина эффекта=<0,20). В таблице 1 также представлена надежность при повторении исследования для всех силовых переменных для устройства 100. В общем измерения абсолютной силы, выполненные во время двусторонних сокращений (ICC находилась в диапазоне от 0,83 до 0,90), более надежны, чем одностороннее условие (ICC находилась в диапазоне от 0,56 до 0,80). С учетом дисбаланса сил между конечностями, только условие двусторонней средней пиковой силы демонстрировало приемлемую надежность (ICC=0,84, 95% CI=0,72-0,91).
Корреляции данных о силе устройства 100 с обратными величинами измерений крутящего момента, полученными от изокинетического динамометра, можно найти в таблицах 2 и 3. На обеих конечностях сила, которую измеряли с использованием устройства 100 во время двусторонних сокращений, значительно коррелировала (p<0,05) с соответствующим крутящим моментом, полученным из динамометрии, который получали во время односторонних сокращений при обеих скоростях (значения r находились в диапазоне от 0,39 до 0,58). В отношении односторонней силы для устройства 100 только данные о правой конечности значительно коррелировали (p<0,01) с динамометрическими крутящими моментами при обеих скоростях (значение r находилось в диапазоне от 0,57 до 0,63), в то время как сила левой конечности не демонстрировала такой корреляции при любых скоростях (значения r находились в диапазоне от 0,29 до 0,35). В отношении дисбаланса между конечностями, только дисбаланс односторонней средней пиковой силы (LL:RL) коррелировал с дисбалансом крутящего момента между конечностями (LL:RL), который измеряли при -120°×с-1 (значение r=0,43).
По представленным данным устройство 100 показывает приемлемые уровни надежности при повторении исследования, когда измеряют пиковую или среднюю пиковую силу сгибателя колена во время двустороннего NHE, и приближается к приемлемому уровню надежности для средней пиковой силы во время односторонних сокращений. Для измерения различий силы между конечностями, только когда NHE выполняли двусторонне, и пиковая сила была средней среди шести сокращений, проявляет ли мера приемлемую надежность. Таким образом, находки, сделанные в данном исследовании, подсказывают, что единственным наиболее надежным способом получения эксцентрической силы сгибателя колена и соотношений между силами конечностей для устройства 100 является двустороннее NHE с пиковой силой, усредненной для шести сокращений. Также имеет место возможность оценивать эксцентрическую силу сгибателя колена во время двустороннего сокращения, но используя измерение одного пика вместо среднего пиковой силы, или во время одностороннего сокращения, однако сравнение силы между конечностями и, в некоторых случаях, измерение абсолютной силы, не выглядят надежными для этих способов. Следовательно, похоже, что двустороннее NHE, которое выполняют с множеством повторений в определенном числе подходов для определения средней эксцентрической пиковой силы сгибателя колена, дает оптимальную надежность. В целях оценки максимальной силы важно минимизировать число повторений на один подход для уменьшения влияния утомления на всем протяжении подхода, поскольку это будет оказывать значительное влияние на среднюю пиковую силу. В данном исследовании осуществляли два подхода по три повторения, но также возможны аналогичные форматы подходов и повторений (т.е. три подхода по два повторения). Также рекомендовано использовать эти измерения эксцентрической силы сгибателя колена и дисбаланса сил между конечностями для сравнения спортсмена с самим собой, а не сравнения между спортсменами. Это обусловлено варьирующими факторами, которые влияют на эффективность NHE, такими как длина рычага и масса верхней части тела, которые должны заметно различаться между спортсменами, но предположительно остаются в общем аналогичными для одного и того же спортсмена.
В отношении совокупной достоверности, сила для двустороннего NHE для обеих конечностей значительно коррелировала с односторонним изокинетическим эксцентрическим крутящим моментом сгибателя колена, в то время как корреляции между силой одностороннего NHE и односторонним изокинетическим эксцентрическим крутящим моментом сгибателя колена смешивались, возможно, вследствие большего количества вариабельности в пределах односторонних сокращений. При сравнении различий силы между конечностями обнаружили только одну корреляцию среди восьми сравнений (динамометрический дисбаланс крутящего момента (LL:RL) при 120°×с-1 против дисбаланса односторонней средней пиковой силы при упражнении на подъем тела, лежа на животе, с помощью мышц задней поверхности бедра (LL:RL)). Это подсказывает, что в общем найденный дисбаланс сил между конечностями для устройства 100 нельзя связать с обратным измерением, полученным на изокинетическом динамометре.
Корреляционный анализ показывает, что в определенной степени два устройства измеряют аналогичные силовые качества участников. Однако приведенные значения r, хотя и обладают значимостью, говорят, что зависимость между двумя модальностями является в лучшем случае умеренной (значимые значения r находятся в диапазоне от 0,39 до 0,63). Вариацию измерений силы между двумя устройствам можно объяснить существенными различиями между двумя требуемыми паттернами движения. Устройство 100 измеряет силу при переменной скорости движения, что заставляет мышцы задней поверхности бедра действовать около коленного сустава для управления опусканием верхней части тела, а также на бедре для поддержки верхней части тела в нейтральном положении, и это можно осуществлять двусторонне или односторонне. Оценка силы сгибателя колена на изокинетическом динамометре представляет собой измерение крутящего момента при постоянной скорости движения, ограниченного коленным суставом, и его можно выполнять только односторонне. Возможно предположить, что различия в скорости движения не должны оказывать большого влияния на создание максимальной эксцентрической силы, в соответствии с зависимостью силы-скорости. Несмотря на это, различия в паттерне движения предположительно должны влиять на силовое качество, которое измеряют, и это должно в определенной степени объяснять изменчивость, наблюдаемую в зависимости от средств исследования. Также можно ожидать, что различие в латерализации между двусторонним NHE и односторонним динамометрическим исследованием должна вносить некоторый вклад в изменчивость, однако в общем одностороннее NHE демонстрировало более слабые корреляции, чем двусторонние сокращения. Частично это может быть обусловлено трудностью, которую участники испытывали при приспособлении к одностороннему условию, о чем свидетельствует большее количество времени для ознакомления, которое было необходимо уделить односторонним сокращениям.
Помимо условия двустороннего NHE, демонстрирующего самый высокий уровень надежности при повторении исследования, способность оценивать одностороннюю эксцентрическую силу сгибателя колена во время двусторонних сокращений может иметь дополнительные эффекты. Хорошо известно, что существуют сложности при нервной регуляции двусторонних и односторонних сокращений, причем двусторонняя недостаточность является основным примером такого феномена. Возможно, что при двусторонних условиях, в задании с известной, но постоянно возрастающей нагрузкой, например при NHE, нервная система может выбирать защиту более слабой или более уязвимой мышцы/конечности и, следовательно, выбирать более агрессивную «нагрузку» более способной мышцы или конечности. По существу двустороннее исследование может быть более способно обнаруживать дисбаланс сил между конечностями, если он имеется, по сравнению с односторонней оценкой силы, которая уже продемонстрировала некоторую прогностическую способность. В частности, это уместно для отслеживания риска HSI у спортсменов, принимая во внимание сообщение о том, что различие в силе между конечностями увеличивает риск повреждения у спортсменов. В действительности, неопубликованные наблюдения показывают, что у профессиональных спортсменов с предыдущим односторонним HSI в анамнезе, устройство 100 способно лучше предсказывать ранее травмированную конечность по сравнению с изокинетическим динамометром, на основании дефицита эксцентрической силы между конечностями.
Интервенционный эксперимент
Четыре рекреационно активных мужчины принимали участие в 10 тренировках в течение периода в четыре недели. Участники выполняли шесть подходов по восемь повторений изокинетического упражнения эксцентрического сгибателя колена для левой конечности, в то время как правая конечность оставалась не тренированной и служила в качестве контрольной конечности. До и после завершения интервенции измеряли уровень эксцентрической силы сгибателя колена участников с использованием устройства 100 посредством выполнения двух подходов из двух двусторонних упражнений на подъем тела, лежа на животе, с помощью мышц задней поверхности бедра. Односторонний парный критерий Стьюдента использовали для сравнения эксцентрической силы сгибателя колена обеих ног (до и после).
Результаты: левая (тренированная) конечность демонстрировала значительное увеличение эксцентрической силы сгибателя колена (до = 370,38 Н ± 76,17 Н; после = 391,64±73,85; средняя разность = 21,26 Н, p=0,009) в то время как правая (контрольная) конечность не демонстрировала изменения (до = 390,57 Н ± 51,74; после = 383,12 Н ± 47,76 Н; средняя разность = -7,45 Н, p=0,190).
Соответственно, устройство 100 может надежно обнаруживать улучшения в силе мышц задней поверхности бедра в течение периода тренировок.
Перекрестные эксперименты с повреждениями
Четырех активных мужчин с клинически диагностированным односторонним растяжением мышц задней поверхности бедра привлекли к участию в данном исследовании. Все спортсмены выполняли два подхода из двух двусторонних упражнений на подъем тела, лежа на животе, с помощью мышц задней поверхности бедра на устройстве 100 для определения эксцентрической силы сгибателя колена как для ранее поврежденной, так и не поврежденной конечности. Односторонний парный критерий Стьюдента использовали для сравнения эксцентрической силы сгибателя колена между конечностями.
Результаты: ранее поврежденная конечность (385,22 Н ± 14,19 Н) была значительно (p=0,041) слабее, чем не поврежденная конечность (425,30 Н ± 26,40).
В приведенных выше экспериментах не использовали нормализацию, например, для роста, веса субъекта, популяционной статистики или тому подобное. Однако следует принимать во внимание, что нормализацию можно выполнять или в системе 1100 обработки или в отдельном электронном обрабатывающем устройстве так, что показатели приводят к базовому уровню в соответствии с опорной популяцией, например, с помощью совокупной популяции или демографической сегрегации.
Ввиду этих экспериментов следует принимать во внимание, что устройство 100 способно эффективно оценивать силу мышц задней поверхности бедра субъекта S и, в частности, демонстрирует приемлемые уровни надежности при повторении исследования и корреляцию с оценками золотого стандарта, т.е. изокинетической динамометрии. Кроме того, устройство 100 демонстрирует многообещающие результаты в интервенционном исследовании и перекрестном исследовании с повреждениями.
Следует принимать во внимание, что устройство 100 с описанными выше примерами облегчает упрощенный способ оценки силы мышц задней поверхности бедра субъекта. Например, в отличие от существующего золотого стандарта в оценке силы мышц задней поверхности бедра, т.е. изокинетической динамометрии, устройство 100 обеспечивает снижение стоимости изготовления, увеличенную портативность, уменьшенное время оценки и не требует наблюдения со стороны высококвалифицированного персонала.
На всем протяжении этого описания и формулы изобретения, которая следует далее, если контекст не требует иного, слово «содержать» и вариации, такие как «содержит» или «содержащий» следует понимать как подразумевающее включение упомянутого целого или группы целых или этапов, но не исключение какого-либо другого целого или группы целых.
Специалисты в данной области примут во внимание, что многие вариации и модификации должны быть очевидны. Все такие вариации и модификации, которые очевидны специалистам в данной области техники, следует рассматривать как находящиеся в пределах сущности и объема, широко представленных в вышеприведенном описании изобретения. Таким образом, например, следует принимать во внимание, что признаки из различных примеров, приведенных выше, могут быть использованы взаимозаменяемо, где это применимо.
Реферат
Группа изобретений относится к медицинской технике. Устройство для использования при оценке силы по меньшей мере одной мышцы-сгибателя колена субъекта содержит опору, два фиксирующих элемента, причем каждый фиксирующий элемент фиксирует соответствующую голень субъекта в положении, которое при использовании, по существу, фиксировано относительно опоры, и по меньшей мере один датчик, который при использовании измеряет силу, указывающую на силу по меньшей мере одной мышцы-сгибателя колена по меньшей мере на одной ноге субъекта, когда субъект выполняет эксцентрическое сокращение по меньшей мере одной мышцы-сгибателя колена. Группа изобретений позволяет проводить оценку силы при выполнении эксцентрического сокращения мышцы. 2 н. и 13 з.п. ф-лы, 13 ил., 3 табл.
Комментарии