Способ определения глубины залегания и расстояния до места прохождения коммуникаций и устройство для его осуществления - RU2016110439A
Код документа: RU2016110439A
Формула
1. Способ определения глубины залегания и расстояния до места прохождения, по крайней мере, одной коммуникации, характеризующийся тем, что подключают источник переменного тока, по крайней мере, к одной коммуникации, генерируют переменный испытательный сигнал и подают его, по крайней мере, в одну коммуникацию, определяют примерную трассу прокладки, по крайней мере, одной коммуникации и место положения первой точки измерения, после чего:
a) Устанавливают блок датчиков, содержащий, по крайней мере, один датчик электромагнитного поля в первую точку измерения, при помощи которого измеряют величину напряженности электромагнитного поля в первой точке на каждом датчике в блоке, после чего при помощи коммутатора фиксируют величину напряженности электромагнитного поля в первой точке измерения на каждом датчике в блоке и высоту над уровнем земли первого датчика в блоке;
b) Перемещают блок датчиков в произвольную точку измерения на известные расстояния по одной координате, измеряют в данной точке величину напряженности электромагнитного поля на каждом датчике, и при помощи коммутатора в данной точке фиксируют величину напряженности электромагнитного поля на каждом датчике, и изменение координат, на которое перемещают блок датчиков электромагнитного поля от первой точки измерения, отличающийся тем, что блок датчиков на стадии b) дополнительно перемешают, по крайней мере, еще по одной координате;
c) Повторяют операцию b) необходимое количество раз в зависимости от заданной точности измерения, характеризующейся количеством коммуникаций и датчиков электромагнитного поля в блоке;
d) Определяют глубину залегания и расстояние, по крайней мере, до одной коммуникации на основе решения нелинейных уравнений в соответствии с выражениями для напряженности электромагнитного поля.
2. Способ по п. 1, отличающийся тем, что глубину залегания и расстояние, по крайней мере, до одной коммуникации определяют на основе решения системы нелинейных уравнений в соответствии с выражениями для напряженности электромагнитного поля при помощи блока обработки устройства определения глубины залегания и расстояния до места прохождения подземной коммуникации, при этом глубину залегания коммуникации относительно уровня грунта определяют как разницу глубины залегания коммуникации относительно первого датчика в первой точке измерения и высоты над уровнем грунта первого датчика в первой точке измерения.
3. Способ по п. 1 или 2, отличающийся тем, что повторяют операции а) - с) не менее трех раз и определяют глубину залегания и расстояния до места прохождения, по крайней мере, до одной подземной коммуникации, как среднее из полученных значений.
4. Способ по п. 2, отличающийся тем, что при проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один одноэлементный датчик электромагнитного поля, содержащий один чувствительный элемент, ось измерения которого размещена вдоль оси X, причем при наличии более одного одноэлементного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их параллельном расположении и переносе в новую точку измерения в блоке друг относительно друга, при этом измерение напряженности электромагнитного поля осуществляют в плоскости, перпендикулярной или неперпендикулярной продольной оси коммуникаций, при постоянном или изменяющимся угле осей измерения датчиков напряженности электромагнитного поля и фиксации расстояний, на которые смещены датчики и углы, на которые повернуты оси датчиков от положения в первой точке измерения, причем при наличии более одной коммуникации, измерения напряженности электромагнитного поля осуществляют при их произвольном или параллельном расположении, при этом напряженность электромагнитного поля определяется, как модуль векторной суммы напряженности электромагнитного поля от каждой m-коммуникации в точке d-датчика и в n-точке измерений из выражений:


где E(1)nd - суммарная напряженность электромагнитного поля, измеренная одноэлементным d-датчиком в n-точке измерения; E(1)ndm,
 - модуль и проекция вектора, соответственно, напряженности электромагнитного поля, в месте расположения одноэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси датчика; Kd - коэффициент преобразования прибора канала d-датчика; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; cn - известное расстояние, на которое первый датчик электромагнитного поля смещен ортогонально продольной оси датчика в n-точку от первой точки измерений по оси Z, ортогональной оси X; an - известное расстояние, на которое смещен первый датчик электромагнитного поля в n-точке измерения от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; xd, zd - известное расстояние, на котором расположен d-датчик электромагнитного поля от первого датчика в блоке датчиков по оси X и Z, соответственно; α0m - угол расположения продольной оси датчика электромагнитного поля к нормали к продольной оси m-коммуникации в первой точке измерений в плоскости параллельной плоскости XZ; αn - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости параллельной плоскости XZ в n-точке измерения относительно положения в первой точке измерений, причем на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникации в плоскости параллельной плоскости XZ и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, α0m, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
- модуль и проекция вектора, соответственно, напряженности электромагнитного поля, в месте расположения одноэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией вдоль оси датчика; Kd - коэффициент преобразования прибора канала d-датчика; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; cn - известное расстояние, на которое первый датчик электромагнитного поля смещен ортогонально продольной оси датчика в n-точку от первой точки измерений по оси Z, ортогональной оси X; an - известное расстояние, на которое смещен первый датчик электромагнитного поля в n-точке измерения от первой точки измерения по оси X, совпадающей с линией продольной оси датчика; xd, zd - известное расстояние, на котором расположен d-датчик электромагнитного поля от первого датчика в блоке датчиков по оси X и Z, соответственно; α0m - угол расположения продольной оси датчика электромагнитного поля к нормали к продольной оси m-коммуникации в первой точке измерений в плоскости параллельной плоскости XZ; αn - угол поворота оси измерения датчика электромагнитного поля относительно продольной оси датчика в плоскости параллельной плоскости XZ в n-точке измерения относительно положения в первой точке измерений, причем на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникации в плоскости параллельной плоскости XZ и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, α0m, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
5. Способ по п. 2, отличающийся тем, что при проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один двухэлементный датчик электромагнитного поля, содержащий два чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга в плоскости XY и прохождении оси X параллельно поверхности грунта, причем при наличии более одного двухэлементного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их параллельном переносе в новую точку измерения в блоке друг относительно друга, при этом измерение напряженности электромагнитного поля осуществляют в плоскости перпендикулярной продольной оси коммуникации, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля определяется, как сумма напряженности электромагнитного поля от каждой m-коммуникации, расположенных параллельно, в точке d-датчика и в n-точке измерений из выражений:



где E(2)nd - суммарная напряженность электромагнитного поля, измеренная двухэлементным d-датчиком в n-точке измерения; Е(2)1nd, E(2)2nd - напряженности электромагнитного поля, измеренные первым и вторым чувствительными элементами двухэлементного d-датчика электромагнитного поля в n-точке измерения, соответственно; E(2)Xndm, E(2)Yndm - напряженности электромагнитного поля, в месте расположения двухэлементного d-датчика электромагнитного поля в n-точке измерения создаваемая m-коммуникацией вдоль оси X и оси Y, соответственно; KXd, KYd - коэффициент преобразования прибора канала X и Y d-датчика, соответственно; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости параллельной плоскости XY, при этом на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости параллельной плоскости XZ и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
6. Способ по п. 2, отличающийся тем, что при проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один двухэлементный датчик электромагнитного поля, содержащий два чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга в плоскости XZ и произвольно расположены в плоскости XZ, причем при наличии более одного двухэлементного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при их параллельном переносе в новую точку измерения в блоке друг относительно друга, при этом измерение напряженности электромагнитного поля осуществляют в плоскости параллельной продольной оси коммуникации, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля определяется в точке d-датчика и в n-точке измерений из выражений:
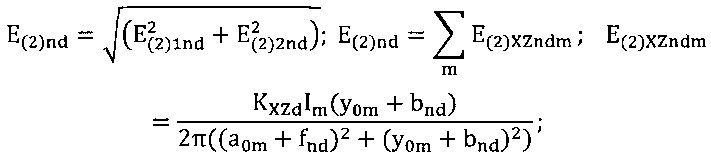
где E(2)nd - суммарная напряженность электромагнитного поля, измеренная двухэлементным d-датчиком в n-точке измерения; E(2)1nd, E(2)2nd - напряженности электромагнитного поля, измеренные первым и вторым чувствительными элементами двухэлементного d-датчика электромагнитного поля в n-точке измерения, соответственно; E(2)XZndm - напряженность электромагнитного поля, в месте расположения двухэлементного d-датчика электромагнитного поля в n-точке измерения создаваемая m-коммуникацией в плоскости параллельной плоскости XZ; KXZd - коэффициент преобразования прибора канала XZ d-датчика; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения т-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости параллельной плоскости XY, при этом на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости параллельной плоскости XZ и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
7. Способ по п. 2, отличающийся тем, что при проведении измерений напряженности электромагнитного поля при наличии, по крайней мере, одной коммуникации и при помощи блока датчиков, содержащего, по крайней мере, один трехэлементный датчик электромагнитного поля, содержащий три чувствительных элемента, оси измерения которых ортогонально размещены относительно друг друга и произвольно расположены в пространстве, причем при наличии более одного трехэлементного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга, при фиксации расстояний, на которые смещены датчики от положения в первой точке измерения, при этом напряженность электромагнитного поля над m-коммуникациями, расположенными параллельно, определяется как векторная сумма напряженности от каждой коммуникации в точке отдатчика и в n-точке измерения из выражений:


где E(3)nd - суммарная напряженность электромагнитного поля, измеренная трехэлементным d-датчиком в n-точке измерения; E(3)1nd, E(3)2nd, Е(3)3nd - напряженности электромагнитного поля, измеренные первым, вторым и третьим чувствительными элементами трехэлементного d-датчика в n-точке измерения, соответственно; E(3)XZndm, E(3)Yndm - напряженности электромагнитного поля, в месте расположения трехэлементного d-датчика электромагнитного поля в n-точке измерения, создаваемая m-коммуникацией в плоскости параллельной плоскости XZ и вдоль оси Y, соответственно; KZXd, KYd - коэффициент преобразования прибора канала XZ и Y d-датчика, соответственно; Im - ток в m-коммуникации; a0m - искомое расстояние до места прохождения m-коммуникации от первого датчика электромагнитного поля в первой точке измерения в плоскости параллельной плоскости XZ, параллельной линии коммуникации; y0m - расстояние от первого датчика электромагнитного поля в первой точке измерения до места прохождения m-коммуникации по оси Y, ортогональной плоскости XZ; bnd - известное расстояние, на которое d-датчик электромагнитного поля смещен в n-точку измерения от первой точки измерения по оси Y; fnd - известное расстояние, на которое смещен d-датчик электромагнитного поля в n-точке измерения от первого датчика в первой точке в плоскости параллельной плоскости XY, перпендикулярной линии прохождения коммуникации, при этом на основе выражений для напряженности электромагнитного поля в точке d-датчика и в n-точке измерений определяют расстояние до места прохождения m-коммуникаций в плоскости параллельной плоскости XZ и глубину залегания на основе решения системы нелинейных уравнений с неизвестными - a0m, y0m, Im, в которой количество измерений равно или больше количества неизвестных, а количество данных, полученных с датчиков, больше или равно количеству неизвестных.
8. Способ по п. 1, отличающийся тем, что глубину залегания и расстояние, по крайней мере, до одной коммуникации определяют на основе решения нелинейных уравнений методами наименьших квадратов и регрессионными методами в соответствии с выражениями для напряженности электромагнитного поля при помощи блока обработки устройства определения глубины залегания и расстояния до места прохождения подземной коммуникации, при этом глубину залегания коммуникации относительно уровня грунта определяют как разницу глубины залегания коммуникации относительно первого датчика в первой точке измерения и высоты над уровнем грунта первого датчика в первой точке измерения.
9. Способ по п. 2 или 8, отличающийся тем, на основе изменения величины и знака измеренных значений электромагнитного поля определяют направление расположения коммуникации.
10. Устройство для определения места прохождения и глубины залегания подземных коммуникаций для выполнения способа по пп. 1-9, содержащее источник переменного тока, подключаемый, по крайней мере, к одной коммуникации, блок датчиков, содержащий, по крайней мере, один датчик электромагнитного поля, и корпус, в котором расположены, по крайней мере, один предусилитель для каждого датчика электромагнитного поля, по крайней мере, один АЦП, соединенный с соответствующим предусилителем, индикатор, блок обработки, блок питания, коммутатор реперных точек, блок памяти расстояния между реперными точками и блок памяти величины электромагнитного поля в реперных точках, при этом блок датчиков соединен с предусилителем, блок питания выполнен с возможностью подачи питания блоку датчиков, предусилителю, блоку обработки и индикатору, а блок обработки соединен с предусилителем через АЦП, индикатором, коммутатором реперных точек, блоком памяти расстояния между реперными точками и блоком памяти величины электромагнитного поля в реперных точках.
11. Устройство по п. 10, отличающееся тем, что в качестве датчиков электромагнитного поля применены одноэлементный, двухэлементный или трехэлементный датчики электромагнитного поля, измеряющие напряженность электромагнитного поля вдоль одной оси, в плоскости или в точке пространства, соответственно, и содержащие чувствительные элементы.
12. Устройство по п. 10, отличающееся тем, что блок датчиков расположен вне или в корпусе.
13. Устройство по п. 10, отличающееся тем, что при наличии в блоке датчиков более одного датчика электромагнитного поля, датчики в блоке разнесены на заранее фиксированные заданные расстояния друг от друга.
14. Устройство по п. 10, отличающееся тем, что в качестве коммутатора применен переключатель на панели прибора, при этом в память прибора введены фиксированные значения расстояний, соответствующие последовательности нажатия переключателя.
15. Устройство по п. 14, отличающееся тем, что переключатель выполнен с возможностью запуска начала измерения в первой точке, фиксации последующих точек измерения, остановки измерения и синхронизации измерений по времени при помощи таймера, а промежуточные расстояния между точками измерения вычисляются по предварительно занесенному в память алгоритму.
16. Устройство по п. 10, отличающееся тем, что дополнительно содержит измеритель расстояния, соединенный с блоком обработки.
17. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применена мерная планка, связанная с устройством и содержащая метки фиксируемых расстояний, занесенных в память прибора.
18. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применено мерное колесо.
19. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применен акселерометр, при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
20. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применена комбинация приборов, выполненных с возможностью дополнительного измерения углов поворота оси измерения датчиков электромагнитного поля и включающих в себя акселерометр, альтиметр, магнетометр, электронный гироскоп, соединенные с блоком обработки, при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
21. Устройство по п. 16, отличающееся тем, что в качестве измерителя расстояния применена GPS система, при фиксации промежуточных точек по предварительно занесенному в память алгоритму.
Комментарии