Наложение форм акустических сигналов с использованием группирования по азимутальным углам и/или отклонениям каротажного зонда - RU2528279C1
Код документа: RU2528279C1
Чертежи
Описание
РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает преимущество заявки США, серийный номер 12/858626, зарегистрированной 18 августа 2010 года под названием «Наложение форм акустических сигналов с использованием группирования по азимутальным углам и/или отклонениям каротажного зонда.
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится в общем к акустическому каротажу при бурении подземных формаций. В частности это изобретение относится к способу наложение форм акустических сигналов с использованием группирования по азимутальным углам и/или отклонениям каротажного зондоналожения форм волн с использованием группирования по азимутальным углам и/или по отклонениям каротажного зонда от стенки ствола скважины.
УРОВЕНЬ ТЕХНИКИ
[0002] Хорошо известно использование акустических (например, звуковых и/или ультразвуковых) систем измерений в известных технических решениях в области бурения скважин, таких как каротаж в процессе бурения (logging while drilling, LWD), телеметрическое сопровождение бурения (measurement while drilling, MWD) и кабельный каротаж. Такие системы акустических измерений широко используются в практике бурения скважин, включая, например, измерения, проводимые с помощью скважинных датчиков, измерение характеристик буровых растворов, а также определение физических свойств геологической формации. В одном применении акустические импульсы могут генерироваться одним или более передатчиков, размещенных в скважине. Акустический эхосигнал может приниматься массивом отдельно расположенных приемников, размещенных в скважине в продольном направлении. Осуществляемый таким способом акустический каротаж позволяет получить набор важных данных по скважине и обычно используется как при каротаже в процессе бурения, так и при кабельном каротаже для определения скорости распространения продольной и поперечной сейсмологической волны (также известной как замедление, или величина, обратная скорости, или интервальное время пробега волны) в формации.
[0003] При анализе результатов измерений, полученных способом акустического каротажа, формы принятых акустических сигналов обрабатываются с учетом их когерентности для построения диаграммы зависимости замедления от времени. На этой диаграмме, известной также как диаграмма когерентности - времени замедления (КВЗ) или диаграмма подобия, набор из нескольких сигналов, полученных от массива акустических приемников, обрабатывается с регистрацией отдельных временных сдвигов по каждому принятому сигналу. Отдельные временные сдвиги основываются на величине замедления, принятой для обработки формы сигналов. Эта обработка дает результат, известный как когерентность, которая может означать присутствие распознаваемого сигнала, полученного отдельными приемниками. Таким образом приход продольной и поперечной волны может распознаваться по форме принятых сигналов, что позволяет определить их скорости распространения. Определенные скорости распространения продольной и поперечной волны связаны с сопротивлением на сжатие и сдвиговой прочностью окружающего пласта и, следовательно, предоставляют полезную информацию об этом пласте.
[0004] Как и другие измерения, проводимые при бурении скважин, данные акустического каротажа зависят от различных источников шумов, как внутренних, так и внешних относительно прибора, с помощью которого осуществляется акустический каротаж. Внутренние шумы могут быть инструментальными шумами и могут воздействовать на рядом расположенные скважинные приборы. Внешние шумы могут быть шумами от бурения, шумами, вызываемыми движением бурильного раствора, шумами, вызванными неустойчивым положением инструмента или различными характеристиками буровых растворов, а также локальными изменениями свойств близлежащих пород. Эти источники шумов имеют, как правило, случайный характер и могут существенно искажать сигнал в зависимости от соотношения сигнал - шум выделенного акустического сигнала.
[0005] Следовательно, существует необходимость в усовершенствованном способе акустического каротажа при проведении измерений в процессе бурения подземных формаций. В частности, существует необходимость в усовершенствованном способе акустического каротажа при проведении измерений в процессе бурения подземных формаций, который может обеспечить улучшение соотношения сигнал-шум при каротаже во время проведения бурильных операций.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Данное изобретение касается одного или более описанных выше недостатков ныне существующих и практикуемых способов акустического каротажа при проведении измерений в процессе бурения подземных формаций. Аспекты данного изобретения включают группирование форм полученных акустических сигналов в одну из множества групп, причем каждая такая группа представляет одно из состояний скважины, в которой проводятся измерения, такое как диапазон измеренных величин отклонений каротажного зонда и/или диапазон измеренных азимутальных углов. Желательно, чтобы эти группы не пересекались. Формы сигналов, сохраненные по меньшей мере в одной из групп, накладывают одна на другую с тем, чтобы получить усредненную форму. Усредненная форма сигнала может в дальнейшем подвергаться обработке, например, с использованием алгоритма определения меры подобия для получения одной или более величин замедления продольной волны, поперечной волны или замедления волны в направлении скважины.
[0007] Примерные варианты воплощения настоящего изобретения предоставляют несколько технических преимуществ. Например, усредненные формы сигналов, отсортированные по группам с одинаковыми расстояниями отклонений каротажного зонда и/или азимутальными углами, характеризуются значительным снижением уровня случайных шумов. Такое снижение уровня шума ведет к дальнейшему повышению точности расчетной величины замедления акустической волны. Наложение форм сигналов может в дальнейшем дать информацию, на базе которой может быть определен качественный индикатор для расчетной величины замедления. Например, малые вариации между сгруппированными формами сигналов могли бы показать, что расчетная величина замедления является более правдоподобной. Такой качественный индикатор может быть в дальнейшем использован, например, при определении весовых характеристик расчетных величин замедления для петрофизических или иных применений.
[0008] В одном аспекте данное изобретение включает способ для осуществления акустического каротажа при проведении измерений в процессе бурения подземных пластов. Этот способ включает вращение скважинного прибора акустического каротажа при проведении бурений в скважине, скважине, которая имеет стенки ствола. Скважинный прибор включает по меньшей мере один акустический передатчик, сконфигурированный на передачу акустических импульсов внутрь скважины, по меньшей мере один линейный массив акустических приемников, распределенных в продольном направлении, и по меньшей мере один датчик, сконфигурированный на измерение состояния скважины. Передатчик направляет множество последовательных акустических импульсов в подземный пласт, а приемники принимают акустические сигналы соответствующей формы. Датчик измеряет условия в скважине, соответствующие по меньшей мере одному из сеансов передачи или приема сигналов. Формы сигналов сортируются на множество групп, причем каждая группа представляет диапазон одной из величин, характеризующих состояние скважины. Формы сигналов из по меньшей мере одной из групп накладываются одна на другую для получения усредненной формы. В одном примерном варианте воплощения данного изобретения величина замедления акустической волны вычисляется с использованием алгоритма определения меры когерентности и усредненных форм сигналов. В предпочтительном варианте воплощения условия в скважине включают по меньшей мере одно отклонение и азимутальный угол.
[0009] Выше были очерчены достаточно широко характерные особенности и технические преимущества настоящего изобретения для того, чтобы легче было понять подробное описание изобретения, приведенное ниже. Дополнительные характерные особенности и преимущества настоящего изобретения, которые составляют предмет формулы изобретения, будут описаны далее. Для специалистов в данной области техники должно быть очевидно то, что описанная концепция и конкретный вариант воплощения могут быть без труда использованы в качестве основы для модификации или проектирования других структур, предназначенных для достижения тех же целей, что и цели настоящего изобретения. Специалисты в данной области техники должны также понимать, что такие эквивалентные конструкции не противоречат духу данного изобретения и не выходят за его рамки в соответствии с изложенным в прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Для более полного понимания настоящего изобретения, а также его преимуществ, обратимся теперь к следующим описаниям, приводимым совместно с сопровождающими их чертежами, на которых:
[0011] На ФИГУРЕ 1 показано схематическое представление морской нефтяной или газовой буровой платформы с использованием примерного варианта воплощения настоящего изобретения.
[0012] На ФИГУРЕ 2 изображен перспективный вид скважинного прибора акустического каротажа, используемого в сочетании с примерными способами настоящего изобретения.
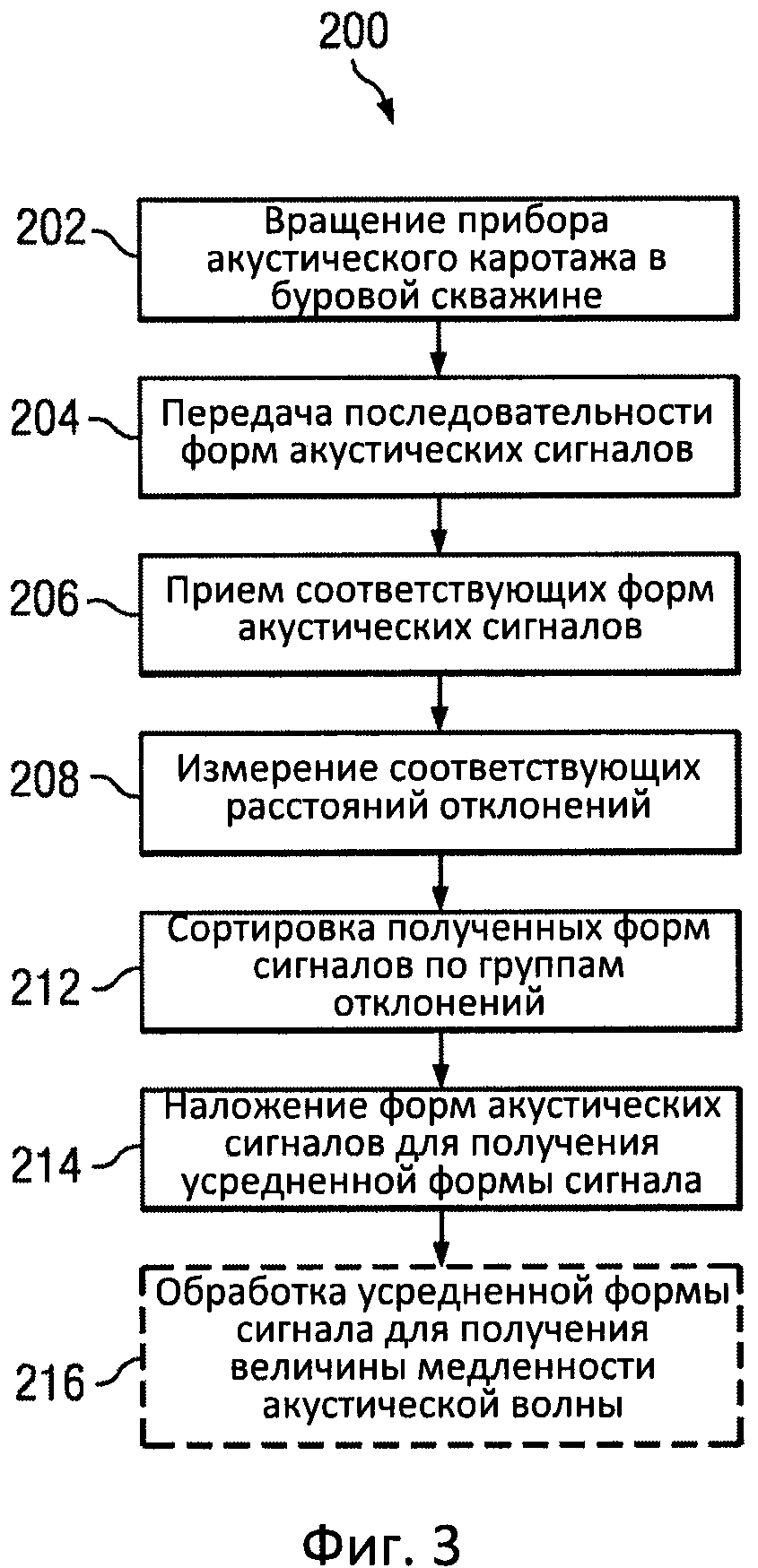
[0013] На ФИГУРЕ 3 изображена блок-схема одного примерного варианта воплощения способа в соответствии с настоящим изобретением.
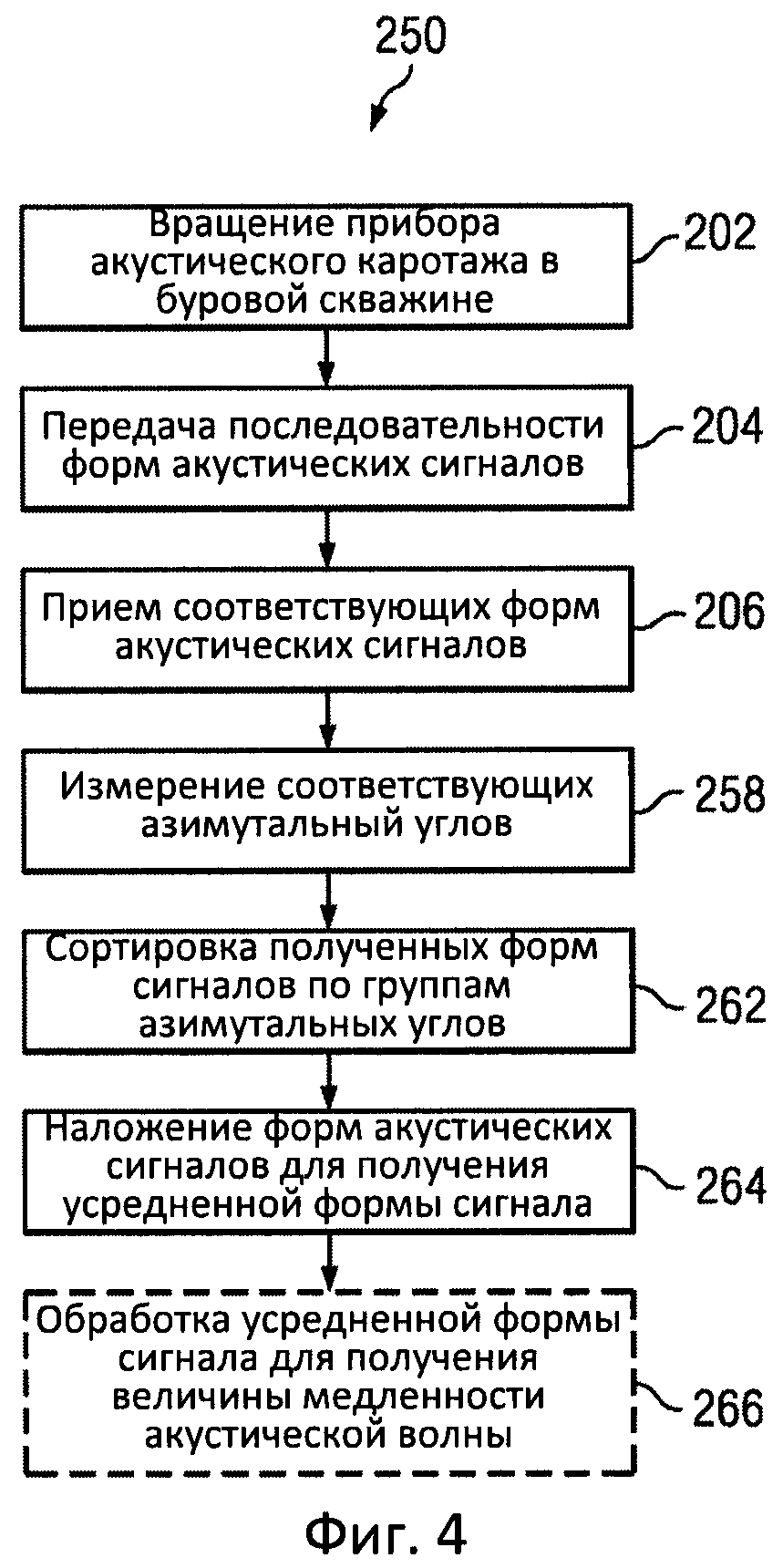
[0014] На ФИГУРЕ 4 изображена блок-схема другого примерного варианта воплощения способа в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ
[0015] На ФИГУРЕ 1 изображен скважинный прибор акустического каротажа 42, размещенный на морской нефтяной или газовой бурильной установке, обозначенной как 10. На ФИГУРЕ 1 полупогруженная бурильная платформа 12 расположена над нефтяной или газовой формацией (не показана), залегающей под морским дном 16. Находящаяся под водой труба 18 проходит от палубы 20 платформы 12 к оборудованию устья скважины 22. Платформа может иметь буровую вышку и подъемный механизм для подъема и опускания бурильной колонны 30, которая, как показано на фигуре, заходит в скважину 40 и имеет буровую головку 32 и скважинный прибор акустического каротажа 42. Как известно специалистам в данной области, буровая колонна 30 может также включать забойный двигатель, импульсную телеметрическую систему для контроля характеристик бурового раствора, отклоняющий инструмент, а также один или более других датчиков, таких как радиоактивные каротажные датчики или датчики резистивного типа, подходящие для определения скважинных характеристик буровой скважины и окружающей формации. Настоящее изобретение не ограничивается этим.
[0016] Средним специалистам в данной области понятно, что реализации способа настоящего изобретения не ограничиваются использованием полупогруженной платформы 12, как показано на ФИГУРЕ 1. Реализации способа настоящего изобретения одинаково хорошо подходят для использования в любых подземных буровых операциях, как подводных, так и наземных. Прежде чем перейти к более подробному описанию вариантов воплощения способа данного изобретения, обсудим характерные особенности одного примерного варианта воплощения скважинного прибора акустического каротажа 42, который может использоваться в связи с данным изобретением.
[0017] На ФИГУРЕ 2 изображен перспективный вид скважинного прибора для акустического каротажа 42. Скважинный прибор 42 подобен тому, который приведен в патенте США 7039524, принадлежащем одному и тому же правообладателю, Хаугленду, и обычно представляет собой цилиндрический прибор, симметричный относительно оси цилиндра 54 (известной также как продольная ось). Прибор акустического каротажа 42 включает в основном цилиндрический корпус прибора 56, форма которого позволяет состыковывать его с бурильной колонной (например, с бурильной колонной 30 на ФИГУРЕ 1) и, следовательно, как правило, но не обязательно, имеет на конце резьбовую часть (не показана). В описанном примерном варианте воплощения прибор акустического каротажа 42 включает по меньшей мере один, а предпочтительнее два (как показано) акустических передатчика 44 и 46, а также линейный массив 50 приемников 52, размещенных в продольном направлении на корпусе прибора 56.
[0018] Скважинный прибор акустического каротажа 42, необязательно, дополнительно включает один или более датчиков отклонения 58 для измерения, например, расстояния отклонений между передатчиками 44 и 46 и приемниками 52 от стенки буровой скважины. Три или более датчиков отклонения, размещенных по окружности, могут быть использованы для измерительного скважинного каверномера и для определения относительного положения прибора 42 в скважине. Такие конфигурации хорошо известны в данной области техники (например, см. патент США 7260477, принадлежащий одному и тому же правообладателю, Хаугленду). Прибор 42 может дополнительно, необязательно, включать датчик азимута (не показан), позволяющий измерять азимутальный угол передатчиков 44 и 46 и приемников 52, когда прибор 42 вращается в буровой скважине. Обычные специалисты в данной области техники сразу признают, что датчики отклонения и/или азимутальный датчик могут располагаться в любом месте буровой колонны. В этом отношении данное изобретение не имеет ограничений.
[0019] Обычные специалисты в данной области техники сразу понимают, что термины «азимут» и «положение отклонителя», как используется здесь, относятся к угловому измерению по окружности прибора 42. В частности, эти термины относятся к угловому расстоянию от интересующей нас точки (например, датчик каротажа в процессе бурения, LWD) до точки отсчета (например, верхняя часть буровой скважины). Измерения азимута являются обычными в данной области техники и, как правило, проводятся с использованием общепринятых измерительных датчиков, включая акселерометры и/или магнетометры.
[0020] При проведении акустического каротажа один или оба передатчика 44 и 46 излучают акустическую энергию внутрь буровой скважины. Часть излучаемой энергии попадает в пласт и вызывает появление в нем продольных и/или поперечных волн. Эти продольные и поперечные волны стремятся распространиться сквозь пласт и затем, как правило, воспринимаются одним или более приемником 52. Как известно средним специалистам в данной области техники, принятые продольные и поперечные волны могут быть использованы для определения скоростей или медленностей продольной и поперечной волн в пласте (например, включая традиционный расчет времени прохождения волны). Скорости продольной и поперечной волн связаны с напряжениями сжатия и сдвига в окружающем пласте и, следовательно, несут полезную информацию об этом пласте.
[0021] Обычным специалистам в данной области техники будет понятно, что термины «замедления» и «скорость» зачастую используются взаимозаменяемо. Точно так же они используются здесь взаимозаменяемо в том понимании, что они связаны друг с другом в обратно пропорциональной зависимости и что измеренная величина одной из этих характеристик может быть легко преобразована в другую путем несложных и известных математических операций.
[0022] Как указывалось выше, скважинный прибор акустического каротажа 42 собирает акустические сигналы посредством массива 50 приемников 52, расположенных в продольном направлении на некотором расстоянии друг от друга. Формы принятых акустических сигналов обычным образом обрабатываются с учетом их когерентности для определения величин медленностей продольной и поперечной волн в пласте. Как хорошо известно средним специалистам в данной области техники, в формациях с малой скоростью эффект преломления затрудняет прохождение поперечной волны в обратном направлении, т.е. в сторону скважины, что делает проблематичным измерение медленностей поперечной волны в формациях с малой скоростью. Таким образом, используются способы определения замедления поперечной волны в формациях с малой скоростью путем измерения характеристик волн, распространяющихся по стволу скважины. Такие способы определения замедления поперечной волны по измерениям медленностей волн, распространяющихся по стволу скважины, хорошо известны в данной области техники. В общих случаях в этих способах используется коррекция величин медленностей волн, распространяющихся по стволу скважины, эта коррекция основывается на, к примеру, измеренных характеристиках бурового раствора и измеренных характеристиках буровой скважины и формации. Такие корректировки часто называют дисперсионными корректировками.
[0023] В буровых скважинах большого диаметра соотношение сигнал-шум (SNR), как правило, хуже не только в формациях с быстрой скоростью для продольных и поперечных волн, но также и в формациях с малой скоростью для волн, распространяющихся вдоль ствола скважины. Более того, во всех пробуриваемых средах измеренные акустические сигналы искажены из-за шума самого измерительного прибора, шума от бурения и шума, вызванного движением бурового раствора. К другим источникам шума можно отнести интерференцию, вызываемую близко расположенными скважинными приборами, шумы, вызванные неустойчивым положением приборов или изменением характеристик бурового раствора, а также локальными изменениями характеристик прилегающих к скважине пород. Как правило, более низкое соотношение сигнал-шум при этих обстоятельствах оказывает негативное влияние на точность расчета медленностей продольных и поперечных волн, а также волн, распространяющихся вдоль ствола скважины. Варианты воплощения настоящего изобретения имеют целью улучшить соотношение сигнал-шум (путем уменьшения уровня шума) и, таким образом, улучшить точность измерений замедления акустической волны в стволе скважины.
[0024] Известно, что усреднение формы акустического сигнала (называемое в данной области техники также наложением форм акустических сигналов) иногда уменьшает вышеупомянутый шум (например, когда условия в скважине остаются неизменными во время приема и накопления разных форм сигналов в данном приемнике). В таких случаях искомый сигнал(ы) имеет тенденцию к когерентному сложению, тогда как шумы и фоновые искажения часто складываются некогерентно. В результате соотношение сигнал-шум может быть улучшено. Вместе с тем, как правило, условия в скважине изменяются от момента накопления одним и тем же приемником одной формы сигналы и до момента накопления им другой формы сигнала. В результате таких изменяющихся условий искомый сигнал может в дальнейшем не складываться когерентно, и тогда усреднение формы сигнала если и дает эффект улучшения соотношения сигнал-шум, то небольшой.
[0025] Одним из аспектов настоящего изобретения является понимание того, что наложение (усреднение) форм принятых сигналов может быть улучшено путем группирования форм сигналов в соответствии с измеренными условиями в скважине (измеренные условия в бурильной скважине), например расстояние отклонения и/или угол положения скважинного инструмента во время излучения или приема сигналов данной формы. При группировании накапливаемых форм сигналов в соответствии с конкретными критериями оказывается, что такие сгруппированные по формам искомые сигналы имеют близкое (или даже существенно одинаковое) время прихода волны. В результате искомый сигнал (сигналы) имеет тенденцию складываться когерентно, что приводит к улучшению соотношения сигнал-шум.
[0026] На ФИГУРЕ 3 приведена блок-схема одного примерного варианта воплощения способа 200 в соответствии с настоящим изобретением. Способ 200 предусматривает размещение прибора акустического каротажа в процессе бурения (например, прибора 42) в подземной скважине в блоке 202. Множество последовательных импульсов акустической энергии передаются в подземную формацию, блок 204 (например, с использованием передатчика 44). Затем соответствующие формы сигнала принимаются линейным массивом акустических приемников, блок 206 (например, приемники 52 массива 50). Блок 208 - измеряются расстояния отклонений в соответствии с передачей сигналов, блок 202, или приемом сигналов, блок 204. Принятые формы акустических сигналов могут быть скоррелированы с измерениями отклонений таким образом, что каждой форме акустического сигнала соответствует некоторое расстояние отклонения. Предпочтительнее, чтобы величины этих отклонений далее соответствовали расстояниям отклонений передатчика от стенки скважины или массива приемников от стенки скважины.
[0027] В блоке 212 формы акустических сигналов, принятых в блоке 206, отсортировываются по множеству групп в соответствии с измерениями отклонений, проделанными в блоке 208. Каждая группа представляет предопределенный диапазон величин отклонений (или диапазон расстояний отклонений, определенных по предварительно установленным критериям). Затем формы акустических сигналов в каждой группе накладываются друг на друга в блоке 214 для получения усредненной формы сигнала. Такие усредненные формы сигнала в дальнейшем могут быть опционально обработаны в блоке 216, например, с использованием алгоритма определения меры когерентности для получения величин замедления прохождения волны в формации, таких как медленность продольной волны, медленность поперечной волны или медленность волны, распространяющейся в направлении скважины.
[0028] Необходимо понимать, что данное изобретение не ограничивается каким-либо конкретным числом групп отклонения или какими-либо конкретными диапазонами отклонений. В одном примерном варианте воплощения данного изобретения используются три группы отклонений. Первая группа может включать диапазон отклонения до примерно 0,5 дюйма. Вторая группа может включать диапазон отклонения от примерно 0,5 до примерно 1,0 дюйма. Третья группа может включать диапазон отклонения свыше одного дюйма. В типовой реализации каждая из этих групп имеет диапазон отклонений от примерно четверти дюйма до примерно 1 дюйма. Однако данное изобретение никоим образом не ограничено в этом отношении.
[0029] На ФИГУРЕ 4 приведена блок-схема одного примерного варианта воплощения способа 250 в соответствии с настоящим изобретением. Способ 250 подобен способу 200, представленному на ФИГУРЕ 3, в том отношении, что он предусматривает размещение прибора акустического каротажа в процессе бурения в подземной скважине, блок 202, передачу множества последовательных импульсов акустической энергии в подземную формацию, блок 204, и прием соответствующих форм акустического сигнала, блок 206. Азимутальные углы измеряются в блоке 258 в соответствии, например, с сигналами, передаваемыми в блоке 202 или принимаемыми в блоке 204. Принятые формы акустических сигналов могут быть скоррелированы с азимутальными измерениями таким образом, что каждой форме акустического сигнала соответствует некоторый азимутальный угол.
[0030] В блоке 262 формы акустических сигналов, принятых в блоке 206, отсортировываются по множеству групп (азимутальные сектора) в соответствии с измерениями азимутов, проделанными в блоке 258. Каждая группа представляет предопределенный диапазон азимутальных углов (или диапазон азимутальных углов, определенных по предварительно установленным критериям). Затем формы акустических сигналов в каждой группе накладываются друг на друга в блоке 264 для получения усредненной формы сигнала. Такие усредненные формы сигнала в дальнейшем могут быть опционально обработаны в блоке 266, например, с использованием алгоритма определения меры когерентности для получения величин замедления прохождения волны в формации, таких как медленность продольной волны, медленность поперечной волны или медленность волны, распространяющейся в направлении скважины.
[0031] Необходимо понимать, что данное изобретение не ограничивается каким-либо конкретным числом азимутальных групп (называемыми также секторами или ячейками) или каким-либо конкретным диапазоном азимутальных углов. В одном примерном варианте воплощения данного изобретения используется восемь азимутальных групп. В предпочтительных вариантах воплощения азимутальные группы являются равноугольными (т.е. одного размера). Например, могут быть использованы восемь азимутальных секторов по 45 градусов каждый. В типовой реализации каждая из этих групп имеет диапазон азимутальных углов от примерно 30 до примерно 90 градусов. Однако данное изобретение никоим образом не ограничено в этом отношении.
[0032] В общем случае в способах 200 и 250 предпочтительнее передавать большое число акустических импульсов в блоке 204 (например, 10 или больше) и принимать соответствующие формы акустических сигналов в блоке 206. В общем увеличение числа форм сигнала приводит, соответственно, к улучшению соотношения сигнал-шум.
[0033] Продолжая анализировать ФИГУРЫ 3 и 4, становится понятным, что способы 200 и 250 могут быть использованы на практике с применением любых подходящих приборов акустического каротажа, проводимого в процессе бурения, например может быть использован общепринятый однополярный прибор, подобный изображенному на ФИГУРЕ 2. Могут также использоваться монопольная, дипольная, бипольная или квадропольная конфигурации приборов. Данное изобретение никоим образом не ограничено в этом отношении.
[0034] Далее следует понимать, что каждый приемник в массиве приемников в общем случае принимает четко выраженную форму акустического сигнала в блоке 206. Эти формы сигналов далее могут быть отсортированы в соответствии с отклонениями и/или азимутами, измеренными в блоке 212 и 262. Например, формы сигналов, принятых первым приемником массива, могут быть отсортированы в первый набор групп отклонения и/или азимутов, формы сигналов, принятых вторым приемником, могут быть отсортированы во второй набор групп отклонения и/или азимутов и т.д. В некоторых вариантах воплощения данного изобретения может оказаться полезной сортировка форм сигналов и по расстояниям отклонений, и по азимутальным углам. Формы сигналов, имеющие общие диапазоны расстояний отклонений и азимутальных углов, затем могут быть наложены друг на друга (усреднены), как описано выше.
[0035] Далее также следует понимать, что такое наложение (усреднение), осуществляемое на этапах 214 и 264, не ограничивается простым арифметическим усреднением. В некоторых вариантах воплощения данного изобретения может оказаться полезным вычисление средневзвешенных значений. Например, в одном примерном варианте воплощения данного изобретения формы сигналов могут быть взвешены с учетом полной акустической энергии принятых форм сигналов. Формам сигналов с большей энергией может быть приписан больший вес по сравнению с теми формами сигналов, которые обладают меньшей энергией. В другом примерном варианте воплощения формы сигналов могут быть взвешены по величине эксцентриситета буровой скважины. Формам сигналов, принятых в буровой скважине с большим эксцентриситетом, может быть приписан меньший вес по сравнению с теми формами сигналов, которые были приняты в буровой скважине с меньшим эксцентриситетом. В еще одном варианте воплощения данного изобретения формы сигналов могут быть взвешены по измеренному азимутальному углу. Формам сигналов, принятых вблизи центра сектора, может быть приписан больший вес по сравнению с теми формами сигналов, которые были приняты ближе к краю сектора.
[0036] Далее, также следует понимать, что некоторые формы сигналов могут получить временной сдвиг до их наложения в блоке 214 или 264 (т.е. к данной форме сигнала может быть применен временной сдвиг). Например, расстояния отклонения, измеренные в блоке 208, могут использоваться для вычисления величин временных сдвигов. Отдельные временные сдвиги могут вычисляться для каждого компонента формы сигнала, т.е. первый временной сдвиг - для продольной волны, второй - для поперечной волны, третий - для волны, распространяющейся по скважине, и т.д. Целью использования временных сдвигов является обеспечение лучшей корреляции между различными компонентами в формах сигналов, наложенных друг на друга. Величины временных сдвигов могут быть пропорциональны, например, измеренному расстоянию отклонений и измеренной или принятой скорости распространения акустической волны в буровом растворе.
[0037] В продолжение рассмотрения ФИГУР 3 и 4 формы сигналов обычно подвергаются цифровой обработке, причем каждая форма сигнала представлена в виде набора значений амплитуд, полученных временной выборкой. Интервал выборки определяется по наивысшей исследуемой частоте. Значений амплитуды оцифровываются с, например, 8-битовой или 12-битовой точностью, но могут также использоваться и другие уровни точности. Способы цифровой обработки сигналов (digital signal processing, DSP) могут быть использованы для применения временных сдвигов, как правило репрезентативных временных сдвигов, к различным формам сигналов данного набора. Следует понимать, что это описание наложения форм не препятствует использованию других дополнительных способов манипулирования формами сигналов, например ремасштабирование амплитуд сигналов различных форм или обработка с целью коррекции или уменьшения искажений, вызванных известными причинами. Данное изобретение никоим образом не ограничено в этом отношении.
[0038] Хотя это и не показано на ФИГУРЕ 2, но будет очевидно то, что скважинные приборы, размещенные и используемые в соответствии с вариантами воплощения способов данного изобретения, как правило, имеют электронный контроллер. Такой контроллер, как правило, имеет обычное электроприводное электронное устройство (например, высоковольтный блок питания) для подачи форм сигналов на по меньшей мере один передатчик, чтобы такой передатчик мог передавать акустические сигналы соответствующей формы. В контроллере обычно имеется также приемное электронное устройство, такое как усилитель с переменным усилением, для усиления относительно слабого ответного сигнала (по сравнению с передаваемым сигналом). Иными словами, контроллер сконфигурирован таким образом, чтобы массив акустических приемников принимал соответствующие формы акустических сигналов, индуцируемых в пласте передаваемыми в него акустическими сигналами. Приемное электронное устройство может также содержать различные фильтры (например, полосовые фильтры), выпрямители, мультиплексоры и другие схемные компоненты для обработки ответного сигнала. Будет очевидно то, что контроллер может располагаться в корпусе прибора или может размещаться на удалении от него (например, в любом месте буровой колонны). Данное изобретение никоим образом не ограничено в этом отношении.
[0039] Как правило, подходящий контроллер включает цифровой программируемый процессор, такой как микропроцессор или микроконтроллер, а также программный код встроенной логики, который может считываться процессором или компьютером и который содержит команды для управления функциями скважинного прибора. В основном может использоваться любой подходящий цифровой процессор (или процессоры), например, среди других, микропроцессор ADSP-2191M компании Analog Devices, Inc.
[0040] Такой контроллер может использоваться, например, для пошагового выполнения способа, как описано выше в отношении ФИГУР 3 и 4. Например, такой контроллер может быть сконфигурирован таким образом, чтобы передатчик передавал акустические сигналы в подземную формацию, записывал угол расположения скважинного прибора во время такой передачи и подключал линейный массив приемников для приема соответствующих акустических сигналов. Контроллер может быть также сконфигурирован для измерения расстояния отклонения и/или азимутального угла, соответствующего по меньшей мере одному сеансу передачи или приема сигналов, и для сортировки форм полученных акустических сигналов по множеству групп на основании измеренных расстояний отклонений. Этот контроллер может быть также сконфигурирован для обработки принятых форм сигналов для определения величин замедления акустических волн. Данное изобретение никоим образом не ограничено в этом отношении.
[0041] Любой подходящий контроллер может также, необязательно, содержать другие управляемые компоненты, такие как датчики, устройства хранения данных, источники питания, таймеры и другие подобные устройства. Такой контроллер также может быть подключен к системе электронной коммуникации с различными датчиками и/или каротажными зондами для мониторинга физических параметров буровой скважины; такими датчиками могут быть датчик гамма-излучения, датчик определения глубины или акселерометр, гиро- или магнитометр для определения азимута и наклона буровой скважины, а также скважинный прибор приемников. Такой контроллер может также, необязательно, подключаться к другим инструментам буровой колонны, таким как телеметрические системы, имеющие связь с поверхностью. Такой контроллер также может иметь регенерируемую или статическую память или устройство хранения данных.
[0042] Хотя настоящее изобретение и его преимущества были описаны подробно, следует понимать, что могут проводиться различные изменения, замещения и замены без отступления от духа и выхода за рамки изобретения в соответствии с изложенным в прилагаемой формуле изобретения.
Реферат
Изобретение относится к области геофизики и может быть использовано при проведении акустического каротажа при бурении подземных формаций. Способ проведения измерений акустического каротажа включает группирование полученных форм акустических сигналов в одну из множества групп. При этом каждая такая репрезентативная группа соответствует некоторым измеренным параметрам состояния буровой скважины (например, диапазон измеренных значений отклонения и/или диапазон измеренных азимутальных углов). Формы акустических сигналов, сохраненные, по меньшей мере, в одной из групп, накладываются одна на другую для получения усредненной формы сигнала. Впоследствии такая усредненная форма сигнала может подвергаться обработке, например, с использованием алгоритма определения меры когерентности для получения, по меньшей мере, одного значения замедления акустической волны. Технический результат - повышение точности каротажных данных. 4 н. и 13 з.п. ф-лы, 4 ил.
Формула
(а) вращение в буровой скважине прибора акустического каротажа при бурении, причем ствол буровой скважины имеет стенку; скважинный прибор содержит по меньшей мере один акустический передатчик, сконфигурированный на передачу акустических импульсов внутрь буровой скважины; по меньшей мере один линейный массив акустических приемников, расположенных на расстоянии друг от друга в продольном направлении, а также по меньшей мере один датчик, сконфигурированный для измерений параметров состояния буровой скважины;
(б) осуществление передатчиком передачи множества последовательных импульсов акустической энергии в подземную формацию;
(в) осуществление приемниками приема соответствующих форм акустических сигналов;
(г) осуществление датчиком измерения параметров состояния буровой скважины, соответствующих по меньшей мере одному из упомянутых передачи в пункте (б) или приема в пункте (в);
(д) сортировку форм сигналов, полученных в (в), на множество групп, причем каждая группа представляет диапазон величин параметров состояния буровой скважины; и
(е) применение временного сдвига по меньшей мере к одной из форм сигналов, причем величина временного сдвига основывается на параметрах состояния буровой скважины, измеренных в (г);
(ж) наложение друг на друга форм сигналов по меньшей мере из одной из таких групп для получения усредненных форм сигналов.
(з) вычисление замедления акустической волны с использованием алгоритма определения меры когерентности и усредненных форм сигнала, полученных в (ж).
(а) вращение в буровой скважине прибора акустического каротажа при бурении, причем ствол буровой скважины имеет стенку; скважинный прибор, включающий по меньшей мере один акустический передатчик, сконфигурированный на передачу акустических импульсов внутрь буровой скважины; по меньшей мере один линейный массив акустических приемников, расположенных на некотором расстоянии друг от друга в продольном направлении, а также по меньшей мере один датчик отклонения, сконфигурированный для измерения расстояния отклонения между стенкой ствола буровой скважины и по меньшей мере одним из передатчиков и линейным массивом приемников;
(б) осуществление передатчиком передачи множества последовательных импульсов акустической энергии в подземную формацию;
(в) осуществление приемниками приема соответствующих форм акустических сигналов;
(г) осуществление датчиком отклонения измерения расстояний отклонения, соответствующих по меньшей мере одному из упомянутых передачи в пункте (б) или приема в пункте (в);
(д) сортировку форм акустических сигналов, полученных в (в), на множество групп, причем каждая группа представляет диапазон расстояний отклонения, а сортировка основывается на расстояниях отклонения, измеренных в (г); и
(е) наложение друг на друга форм сигналов по меньшей мере из одной из таких групп для получения усредненных форм сигналов,
(ж) вычисление замедления акустической волны с использованием алгоритма определения меры когерентности и усредненных форм сигнала, полученных в (е).
(а) вращение в буровой скважине прибора акустического каротажа при бурении, причем ствол буровой скважины имеет стенку; скважинный прибор, включающий по меньшей мере один акустический передатчик, сконфигурированный на передачу акустических импульсов внутрь буровой скважины; по меньшей мере один линейный массив акустических приемников, расположенных на некотором расстоянии друг от друга в продольном направлении, а также по меньшей мере один азимутальный датчик, сконфигурированный для измерения азимутального угла по меньшей мере одного из передатчиков и линейного массива приемников;
(б) осуществление передатчиком передачи множества последовательных импульсов акустической энергии в подземную формацию;
(в) осуществление приемниками приема соответствующих форм акустических сигналов;
(г) осуществление азимутальным датчиком измерения азимутальных углов, соответствующих по меньшей мере одному из упомянутых передачи в пункте (б) или приема в пункте (в);
(д) сортировку форм акустических сигналов, полученных в (в), на множество групп, причем каждая группа представляет диапазон азимутальных углов, а сортировка проводится по азимутальным углам, измеренным в (г); и
(е) применение временного сдвига по меньшей мере к одной из форм сигналов, причем величина временного сдвига основывается на азимутальном угле, измеренном в (г);
(ж) наложение друг на друга форм сигналов по меньшей мере из одной из таких групп для получения усредненных форм сигналов.
(з) вычисление замедления акустической волны с использованием алгоритма определения меры когерентности и усредненных форм сигнала, полученных в (ж).
(а) вращение в буровой скважине прибора акустического каротажа при бурении, причем ствол буровой скважины имеет стенку; скважинный прибор, включающий по меньшей мере один акустический передатчик, сконфигурированный на передачу акустических импульсов внутрь буровой скважины; по меньшей мере один линейный массив акустических приемников, расположенных на некотором расстоянии друг от друга в продольном направлении; датчик направленного действия, сконфигурированный для измерений азимутального угла, а также по меньшей мере один датчик отклонений, сконфигурированный для измерения расстояний отклонения между стенкой ствола скважины и по меньшей мере одним из передатчиков и линейным массивом приемников;
(б) осуществление передатчиком передачи множества последовательных импульсов акустической энергии в подземную формацию;
(в) осуществление приемниками приема соответствующих форм акустических сигналов;
(г) осуществление азимутальным датчиком измерений азимутальных углов, соответствующих по меньшей мере одному из упомянутых передачи в пункте (б) или приема в пункте (в);
(д) осуществление датчиком отклонения измерений расстояния отклонения, соответствующих по меньшей мере одному из упомянутых передачи в пункте (б) или приема в пункте (в);
(е) сортировку форм акустических сигналов, полученных в (в), на множество групп, причем каждая группа представляет диапазон значений отклонений и диапазон азимутальный углов, а сортировка основывается на азимутальном угле, измеренном в (г), и на отклонении, измеренном в (д); и
(е) применение временного сдвига, по меньшей мере, к одной из форм сигналов, причем величина временного сдвига основывается на азимутальном угле, измеренном в (г);
(ж) наложение друг на друга форм сигналов по меньшей мере из одной из таких групп для получения усредненных форм сигналов.
Комментарии