Акустическое каротажное устройство - RU2532759C1
Код документа: RU2532759C1
Чертежи
Описание
Изобретение относится к системам определения свойств горных пород, в частности к устройствам акустического каротажа.
В традиционных акустических зондах каротажа приемники обычно устанавливаются на равном расстоянии друг от друга вдоль оси ствола скважины и часто равноудаленно от оси зонда или скважины в радиальном направлении. Так, в статье V.Pistre, et.al. A modular wireline sonic tool for measurement of 3D (azimuthal, radial and axial) formation acoustic properties// SPWLA 46th annual logging symposium (2005) показано, что измерение пространственного распределения давления во флюиде производится приемниками, расположенными на заданном расстоянии от оси скважины в точках с различными азимутальными и осевыми координатами. Такая конфигурация позволяет рассчитать время вступления нескольких волн, распространяющихся вдоль оси ствола скважины, например, головных волн P и S, а также скважинных мод (например, Стоунли и псевдорэлеевских).
Другие схемы измерения, позволяющие получить информацию о зависимости давления от азимутального угла, описаны, например, в документах CB. Vogel and R.A. Heroltz, The CAD, a circumferential acoustical device for well logging, SPE 6819, (1977), и US 2011/0019501. Согласно представленной схеме приемники размещаются вблизи стенки ствола скважины и измеряют азимутальное распределение поля давления. Такая конфигурация оказывается полезна для получения информации о поверхностных волнах, распространяющихся вдоль границ раздела упругой и жидкой сред. Однако все описанные выше приборы измеряют распределение давления на фиксированном расстоянии от оси ствола скважины или зонда и не могут быть использованы для получения информации о радиальном распределении волнового поля. Такая конфигурация может не быть оптимальной с точки зрения точности измерений и решения некоторых обратных задач (например, при вычислении дисперсионных свойств распространяющихся волн, физических свойств бурового раствора, обсадной колонны или вмещающей породы), пространственного сэмплирования и оптимизации количества требуемых точек измерения. На сегодняшний день в явном виде не существует методики пространственного измерения волновых полей (включая разные радиусы), а информация о радиальном распределении таких полей не используется при обработке результатов измерений.
Технический результат, достигаемый при реализации заявленного изобретения, заключается в обеспечении возможности пространственного измерения распределения поля давлений или других компонент волнового поля (упругие напряжения, деформации, скорости, перемещения, ускорения) по всем трем координатам, включая измерения на разных радиусах. Использование пространственно распределенных приемников для каротажных зондов может облегчить разделение скважинных мод в измеренном сигнале, что позволит оптимизировать измерение и последующую обработку сигнала. Предлагаемая система измерений позволяет менять положение приемников и измерять зависимость давления и других компонент волнового поля (упругие напряжения, деформации, скорости, перемещения, ускорения) от всех трех координат.
Акустическое каротажное устройство согласно настоящему изобретению содержит по меньшей мере один излучатель и по меньшей мере два приемника, причем приемники расположены в точках с разными азимутальными координатами и выполнены с возможностью проведения измерений волнового поля в точках, расположенных на разных расстояниях от вертикальной оси устройства.
Приемники могут быть установлены с возможностью изменения их азимутального или радиального положения в процессе измерений, а также с возможностью изменения их положения по осевой координате. Приемники могут представлять собой распределенные приемники.
Могут быть осуществлены измерения волновых полей давлений, напряжений, деформаций, смещений, скоростей или ускорений.
Согласно одному из вариантов реализации изобретения, акустическое каротажное устройство содержит цилиндрический корпус, на котором расположены по меньшей мере две пары разнесенных по высоте корпуса кронштейнов, один конец каждого из которых прикреплен к корпусу с возможностью вращения. В каждой паре к свободным концам верхнего и нижнего кронштейнов, подвижно соединенным между собой, прикреплен приемник, а прикрепленный к корпусу конец по меньшей мере одного из кронштейнов в каждой паре установлен с возможностью вертикального перемещения по корпусу. Установленные с возможностью вертикального перемещения по корпусу концы верхних кронштейнов или нижних кронштейнов всех пар могут быть расположены на одном уровне и жестко соединены между собой. Приемник может представлять собой распределенный приемник, выполненный в виде упругой или гибкой ленты, с расположенными на ней приемниками, один конец которой прикреплен к корпусу, а другой прикреплен к свободным концам верхнего и нижнего кронштейнов.
Согласно другому варианту реализации изобретения в каждой паре кронштейнов прикрепленные к корпусу концы верхнего и нижнего кронштейна установлены с возможностью вертикального перемещения по корпусу. При этом установленные с возможностью вертикального перемещения по корпусу концы верхних кронштейнов и/или нижних кронштейнов всех пар могут быть расположены на одном уровне и жестко соединены между собой. Приемник может представлять собой распределенный приемник, выполненный в виде упругой или гибкой ленты, с расположенными на ней приемниками, один конец которой прикреплен к корпусу, а другой прикреплен к свободным концам верхнего и нижнего кронштейнов.
Согласно еще одному варианту реализации изобретения акустическое каротажное устройство содержит цилиндрический корпус, на котором закреплены по меньшей мере два кронштейна, расположенные на одной высоте перпендикулярно к вертикальной оси устройства, на свободных концах каждого из которых установлен приемник, при этом кронштейны выполнены с возможностью удлинения в радиальном направлении от вертикальной оси устройства.
Согласно другому варианту реализации изобретения акустическое каротажное устройство содержит цилиндрический корпус, на котором закреплены по меньшей мере два кронштейна, на свободных концах каждого из которых установлен приемник. Кронштейны расположены под углом к вертикальной оси устройства и выполнены с возможностью удлинения и/или изменения угла между осью устройства и кронштейном. К каждому приемнику может быть прикреплена гибкая телескопическая штанга, расположенная перпендикулярно к вертикальной оси устройства, другой конец которой прикреплен к корпусу. Во всех описанных реализациях приемники могут представлять собой распределенные приемники.
Согласно еще одному варианту реализации изобретения приемники расположены по меньшей мере на двух сетках, имеющих разные радиусы, в точках с разными азимутальными и осевыми координатами.
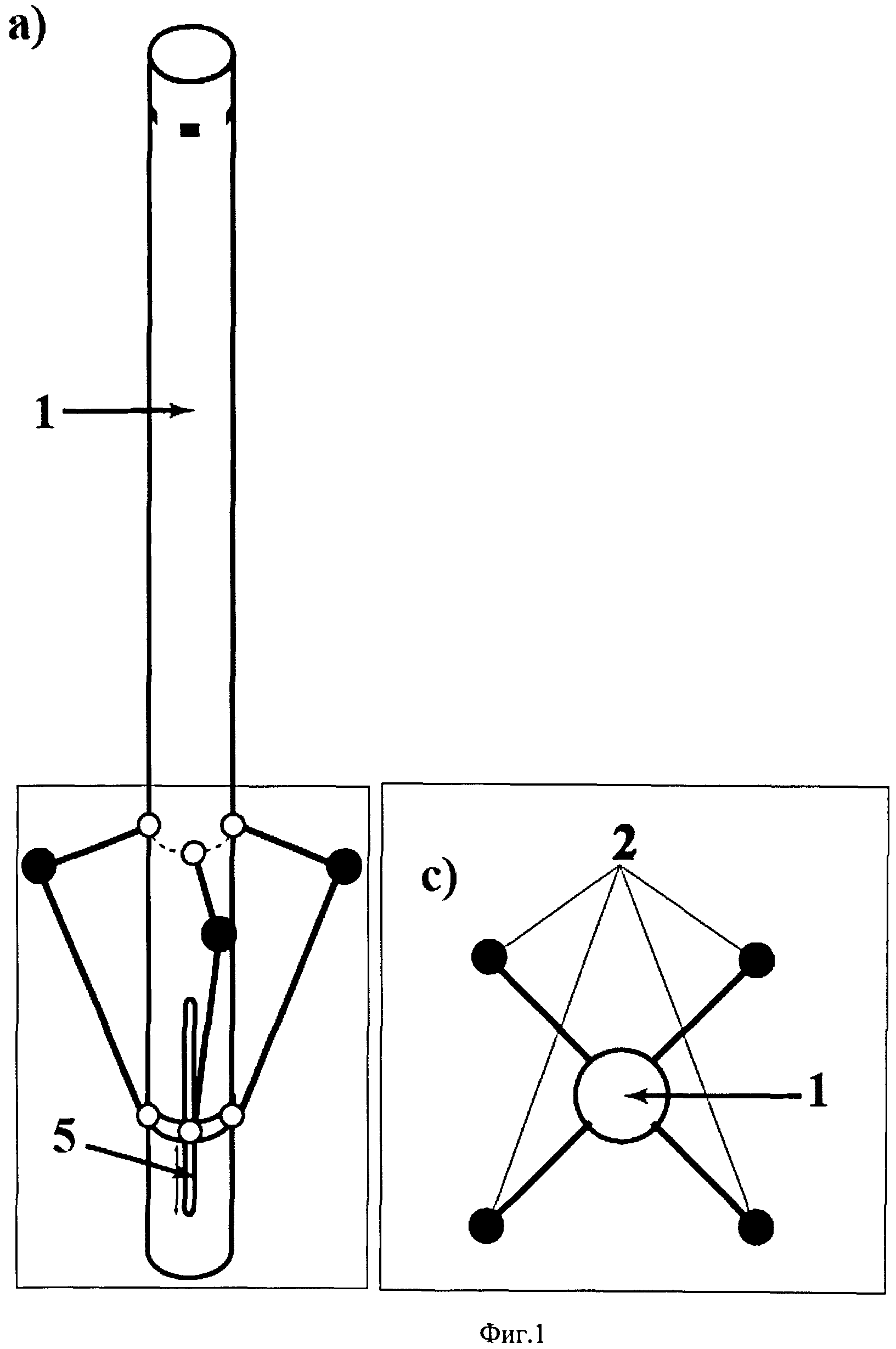
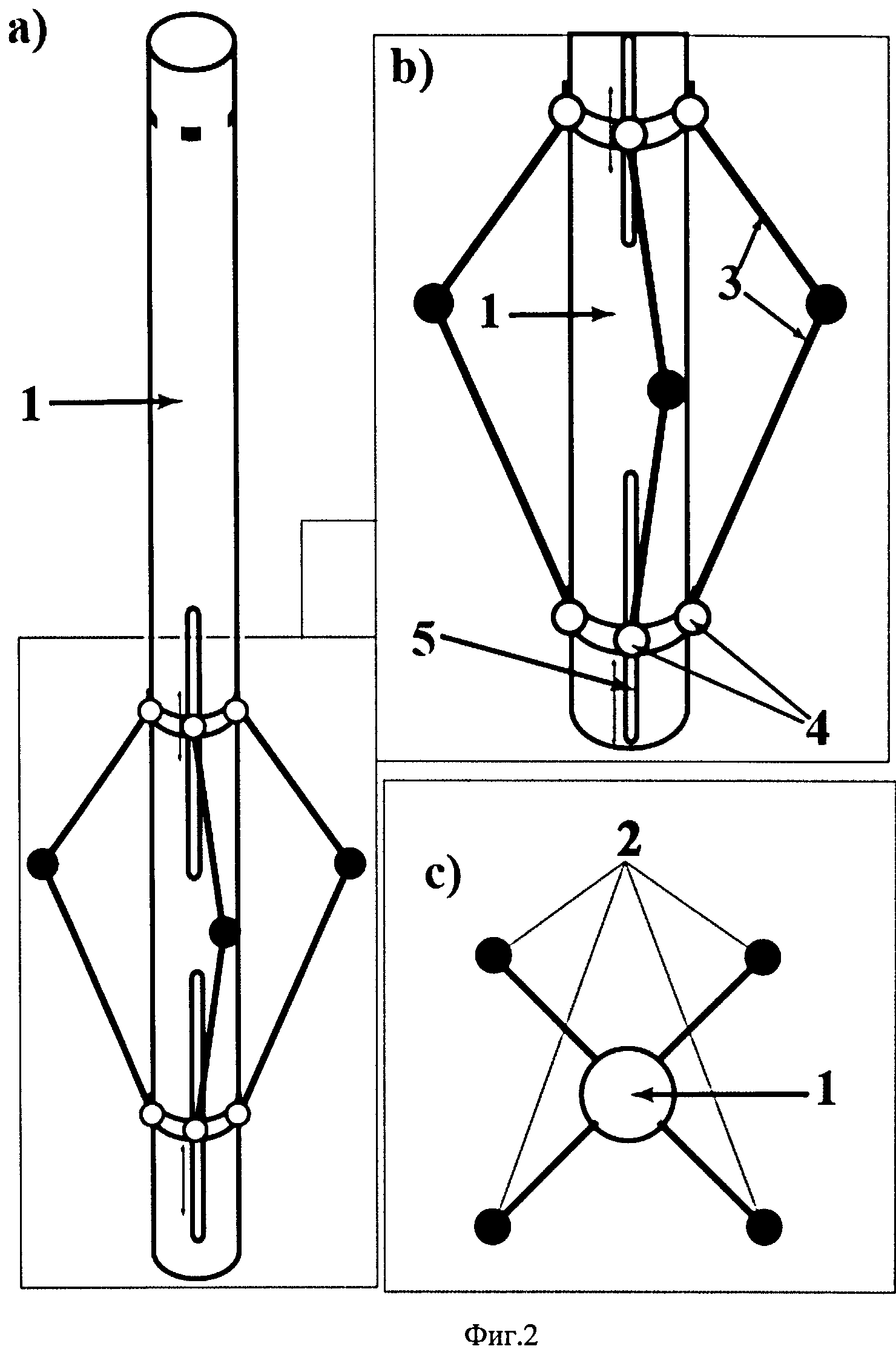
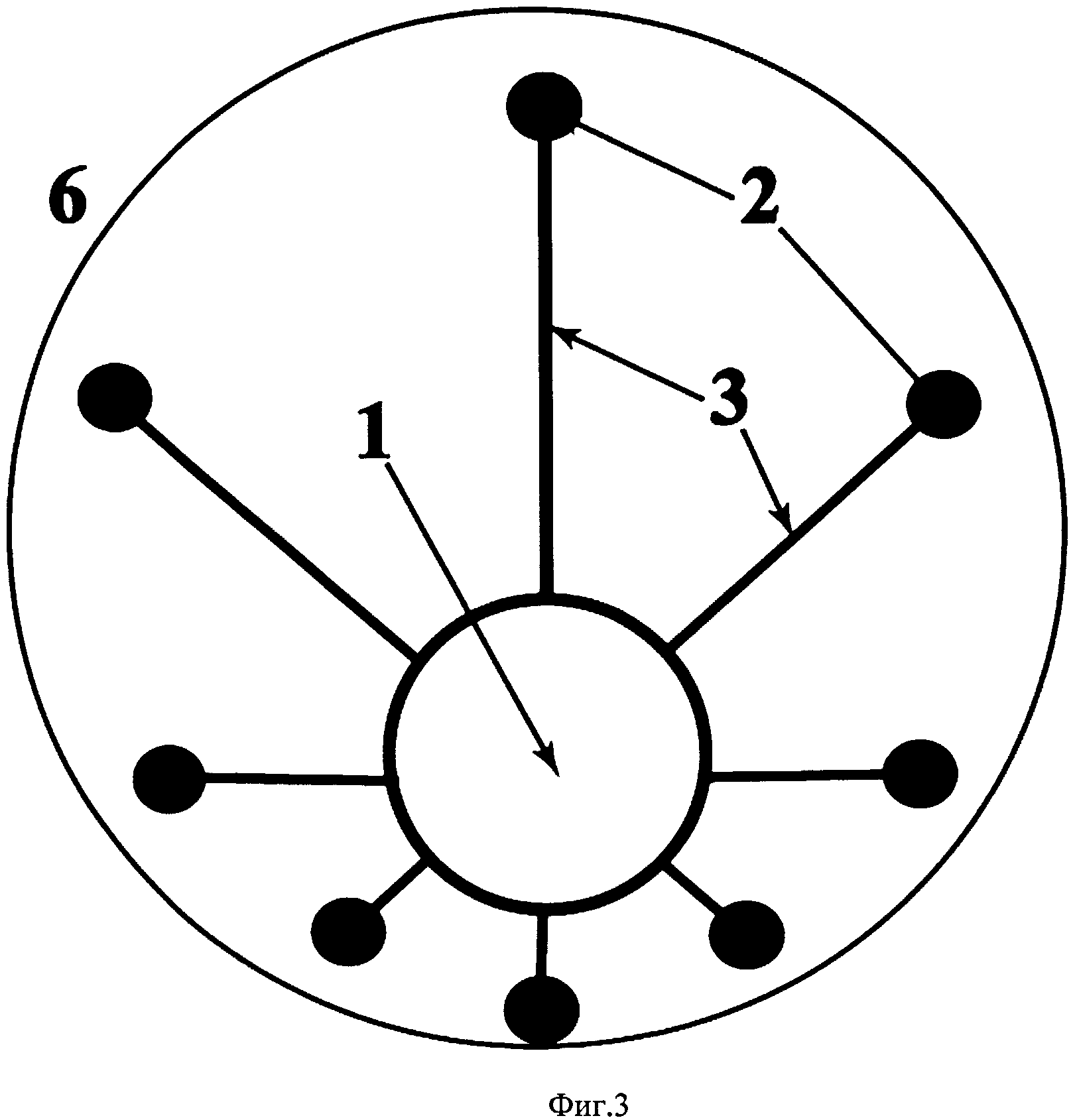
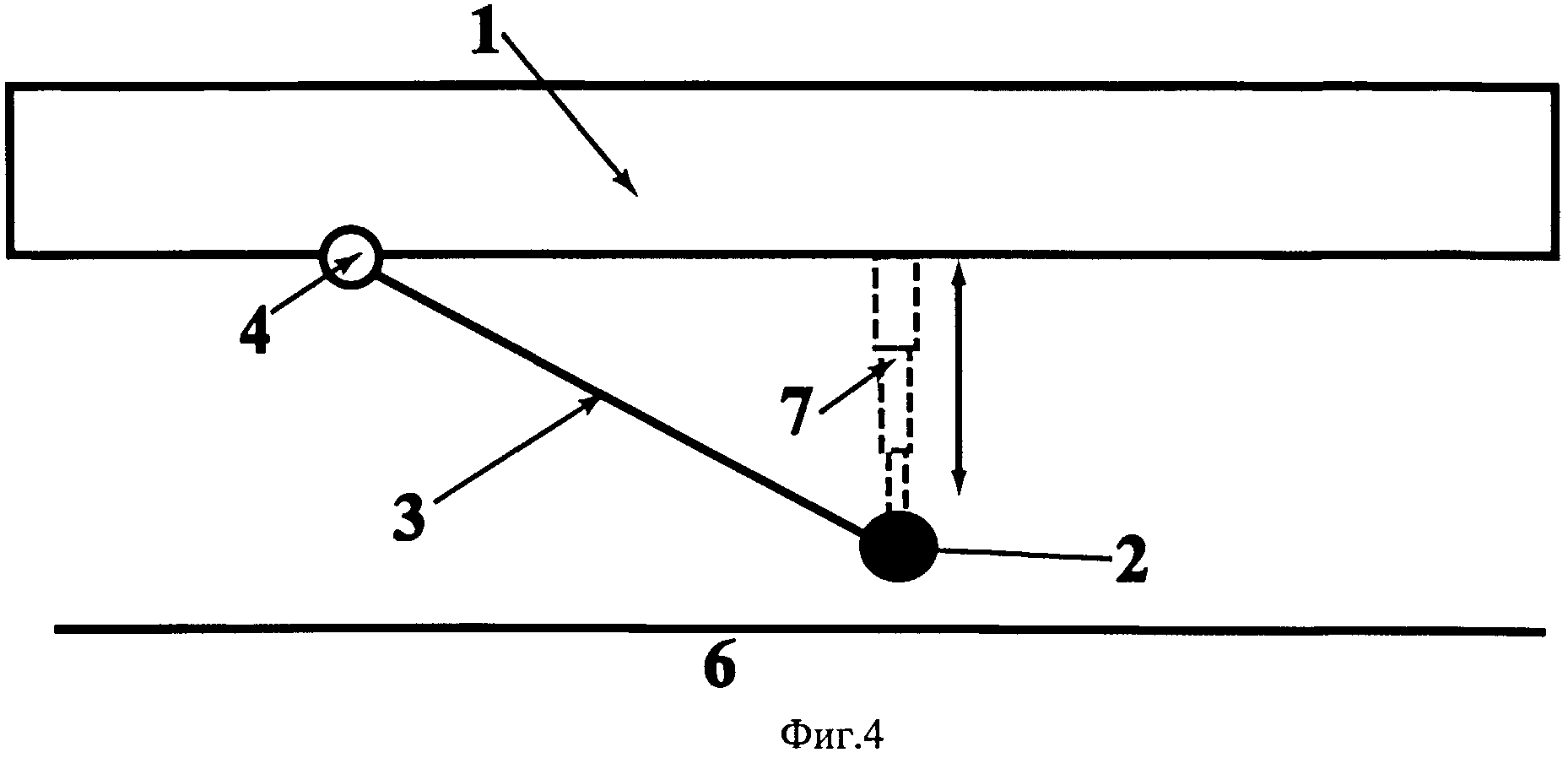
Изобретение поясняется чертежами, где на фиг.1a показан один из вариантов реализации изобретения для измерения давления (скоростей, ускорений, деформаций, напряжений). На фиг.1b крупным планом показана секция приемников, а на фиг.1c показан вид сверху на данную секцию. На фиг.2a показан еще один вариант реализации изобретения для измерения давления (скоростей, ускорений, деформаций, напряжений). На фиг.2b крупным планом показана секция приемников, а на фиг.2c показан вид сверху на данную секцию. На фиг.3 изображен вариант реализации изобретения для измерения волнового поля приемником, соединенным с удлиняющимся кронштейном; на фиг.4 показан еще один пример реализации изобретения с возможностью изменения радиального положения приемника; на фиг.5 показан вариант реализации изобретения с измерением распределения волнового поля с помощью ленты с приемниками; на фиг.6 изображен вариант реализации изобретения с блоком приемников; на фиг.7 показан вариант реализации изобретения с размещением приемников на сетке.
Предлагаемая новая система позиционирования для приемников позволяет производить измерения в любой точке внутри ствола скважины. В отличие от стандартных схем измерения, особый выбор конфигурации пространственного распределения приемников (распределение точек измерения по радиусу, в направлении оси и азимута) даст лучшие результаты. С математической точки зрения знание волнового поля в нескольких точках позволяет улучшить решение обратной задачи. Более того, обработка сигналов, измеренных на приемниках с различными радиальными координатами дает возможность получить информацию, которая недоступна при использовании традиционных конфигураций.
Система может предусматривать возможность варьирования положения приемников во время каротажа, оптимизируя точность измерений (например, увеличение соотношения полезный сигнал/шум) и получая дополнительную информацию для реконструкции волнового поля.
Один из возможных вариантов реализации изобретения показан на фиг.1. Модуль с излучателями (не показан) расположен в верхней или нижней части корпуса 1 предлагаемого каротажного устройства. Строение данного модуля и характеристики излучателей могут быть идентичны или отличаться от традиционного оборудования для акустического каротажа. Один или несколько модулей приемников расположены выше или ниже модуля излучателей на определенном от него расстоянии. Два или более (например, четыре) приемников 2 в каждом модуле измеряют волновое поле в точках с разными азимутами. Каждый приемник 2 прикреплен к свободным концам двух кронштейнов 3, подвижно соединенным между собой (например, шарниром или иным способом, обеспечивающим возможность вращательного движения). Другие концы кронштейнов 3 прикреплены к корпусу 1 с помощью соединения 4, обеспечивающего их подвижность относительно корпуса (например, шарнирного или иного соединения, обеспечивающего вращение кроншейна 3 и/или его подвижность). В каждой паре прикрепленный к корпусу конец по меньшей мере одного из кронштейнов 3 может быть установлен с возможностью перемещения по вертикали вдоль направляющей 5, расположенной на корпусе 1 устройства и выполненной, например, в виде прорези или рельсовой направляющей. При этом концы кронштейнов 3, установленные с возможностью перемещения по вертикали, либо жестко соединены между собой и двигаются вертикально совместно, либо являются независимыми и двигаются независимо друг от друга.
Процесс измерения поля с помощью данного варианта реализации изобретения включает следующие этапы. Каротажное устройство и его программное обеспечение подготавливают для проведения измерений и затем устройство помещают в скважину. Последовательно перемещая устройство вдоль ствола скважины согласно заданному алгоритму, выбирают некоторую точку вдоль оси скважины, в которой предполагается проводить измерения волновых полей. Соединения 4, находящиеся на направляющей 5, приводят в движение вдоль этой направляющей, например, с помощью электромотора (не показан). Данный сдвиг приводит к изменению угла между верхним и нижним кронштейнами 3, что меняет радиальное и осевое положение приемников 2. Сдвиг соединений 4 производится на такое расстояние, чтобы положение приемников 2 соответствовало программно заданному значению. После установки приемников 2 в требуемое положение происходит возбуждение акустического сигнала излучателем и проводят измерение и запись компонент волнового поля. Вышеуказанные действия могут быть повторены для проведения измерений поля в точках с другими значениями осевых, азимутальных и радиальных координат. Аналогично проводят измерения при других положениях устройства вдоль скважины.
Таким образом, такая система позиционирования позволяет проводить измерение на любом расстоянии от поверхности устройства до стенки ствола скважины. Кроме того, важно обеспечить вращение модуля для охвата всех возможных азимутальных углов. Перемещение всего устройства вдоль оси ствола скважины позволит измерить давление в любой точке бурового раствора между поверхностью устройства и стенкой ствола скважины.
Одним из недостатков подобной установки является возможное изменение положения приемников по осевой координате при изменении их радиального положения. Проблемы можно избежать, если для фиксации положения приемника 2 используются два подвижных конца 4 кронштейнов 3 (см. фиг.2), расположенных на верхних и нижних направляющих 5. Чтобы избежать сильного воздействия устройства на распределение волновых полей, элементы систем позиционирования не должны быть крупногабаритными, должны быть максимально акустически прозрачными или оказывать минимальное воздействие на звуковые волны, распространяющиеся во флюиде. Следует отметить, что в случае совпадения радиальных положений приемников с радиусом устройства, схема каротажа очень близка к традиционной и позволяет проводить измерения и анализ данных, разработанные для существующих каротажных приборов.
На фиг.3 изображен принцип измерения волнового поля приемниками 2, соединенными с удлиняющими кронштейнами 3, расположенными на одной высоте перпендикурядно к оси устройства. Данная система позволяет выполнять измерения в точках с заданными радиальными координатами и на определенном расстоянии от стенки 6 ствола скважины. Поскольку сэмплирование волнового поля должно выполняться в точках с различными азимутальными координатами, количество таких кронштейнов и их азимутальные положения могут быть выбраны произвольно. Удлиняющие кронштейны 3 могут быть реализованы, например, в виде телескопического кронштейна, состоящего из вложенных друг в друга трубок, относительное движение которых позволяет регулировать общую длину кронштейна 3.
Процесс измерения поля с помощью данного устройства реализуется следующим образом. После установки устройства в точке измерения вдоль скважины производится удлинение кронштейнов 3 (например, с помощью электромотора или пневмонасоса). Данное удлинение может выполняться независимо для каждого из кронштейнов и может сопровождаться поворотом тела устройства и/или секции приемников вокруг оси прибора. Таким образом меняя угол поворота приемников 2 и их расстояние от оси устройства, можно выставить приемники 2 в точки с программно заложенными координатами (радиальной, азимутальной и осевой).
После установки приемников 2 в требуемое положение происходит возбуждение акустического сигнала излучателем и проводится измерение и запись компонент волнового поля. Указанные действия могут быть повторены для проведения измерений поля в точках с другими значениями осевых, азимутальных и радиальных координат.
В устройстве, изображенном на фиг.4, каждый приемник 2 соединен с одним удлиняющим кронштейном 3, закрепленным на поверхности корпуса 1 устройства с помощью соединения 4. Угол наклона кронштейна 3 и расстояние между приемником 2 и корпусом 1 регулируется удлинением гибкого кронштейна 7, прикрепленного к корпусу 1. Изменение длины кронштейна 7 позволяет изменять радиальное положение приемников 2 или привести их в соприкосновение со стенкой 6 ствола скважины. Соединение 4 может быть выполнено в виде шарнира, а кронштейн 7 может представлять собой гибкую телескопическую штангу, длина которой может регулироваться, например, с помощью пневмонасоса. Изменения угла между осью инструмента и данным кронштейном 3 регулируется путем регулировки длины кронштейна 7. Это позволяет изменять радиальное положение приемников 2, а также привести их в соприкосновение со стенкой 6 ствола скважины. Подобный вариант позволяет осуществлять изменение только угла наклона кронштейна к оси прибора без его удлинения; удлинение кронштейна без изменения угла его наклона к оси прибора; возможность одновременного изменения как угла наклона, так и длины кронштейна.
Процесс измерения поля с помощью данного устройства реализуется следующим образом. После установки устройства в точке измерения вдоль скважины производится удлинение кронштейнов 7 (например, с помощью электромотора или пневмонасоса). Данное удлинение приводит к изменению угла между кронштейном 3 и корпусом 1. Это позволяет контролировать радиальное положение приемников 2, зафиксированных на конце кронштейна 3, и менять радиальное и осевое положение приемников 2.
После установки приемников 2 в требуемое положение происходит возбуждение акустического сигнала излучателем и проводится измерение и запись компонент волнового поля. Описанные действия могут быть повторены для проведения измерений поля в точках с другими значениями осевых, азимутальных и радиальных координат.
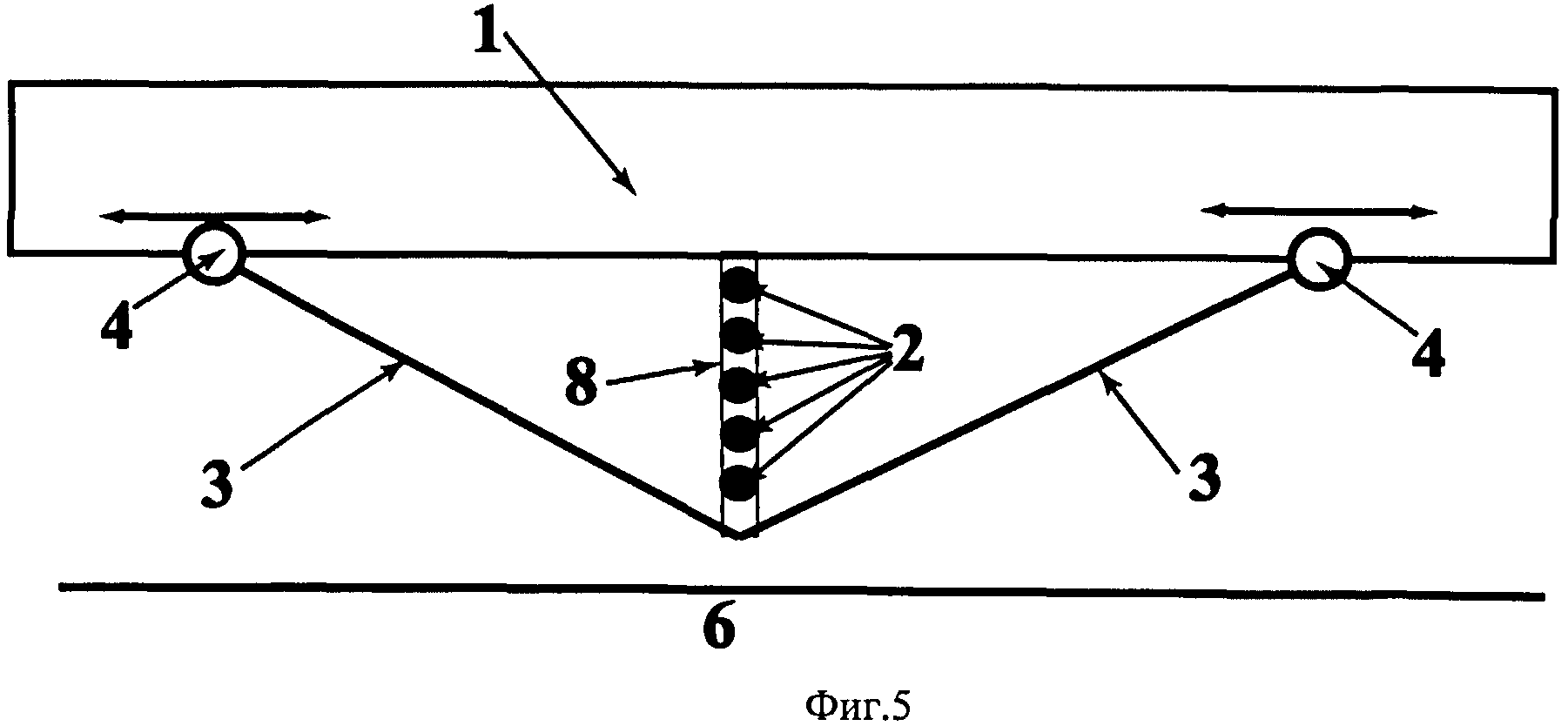
Можно использовать упругую или гибкую ленту 8 с приемниками 2, тянущуюся от поверхности корпуса 1 до точки с выбранным радиальным положением (см. фиг.5). Таким образом, можно распределить несколько приемников в точках с различными радиусами и увеличить количество и точность данных. Стоит отметить, что массив приемников может быть размещен на удлиняющем кронштейне или рядом с ним. Описанные распределения датчиков могут быть применены для каждого описанного примера с удлиняющими кронштейнами.
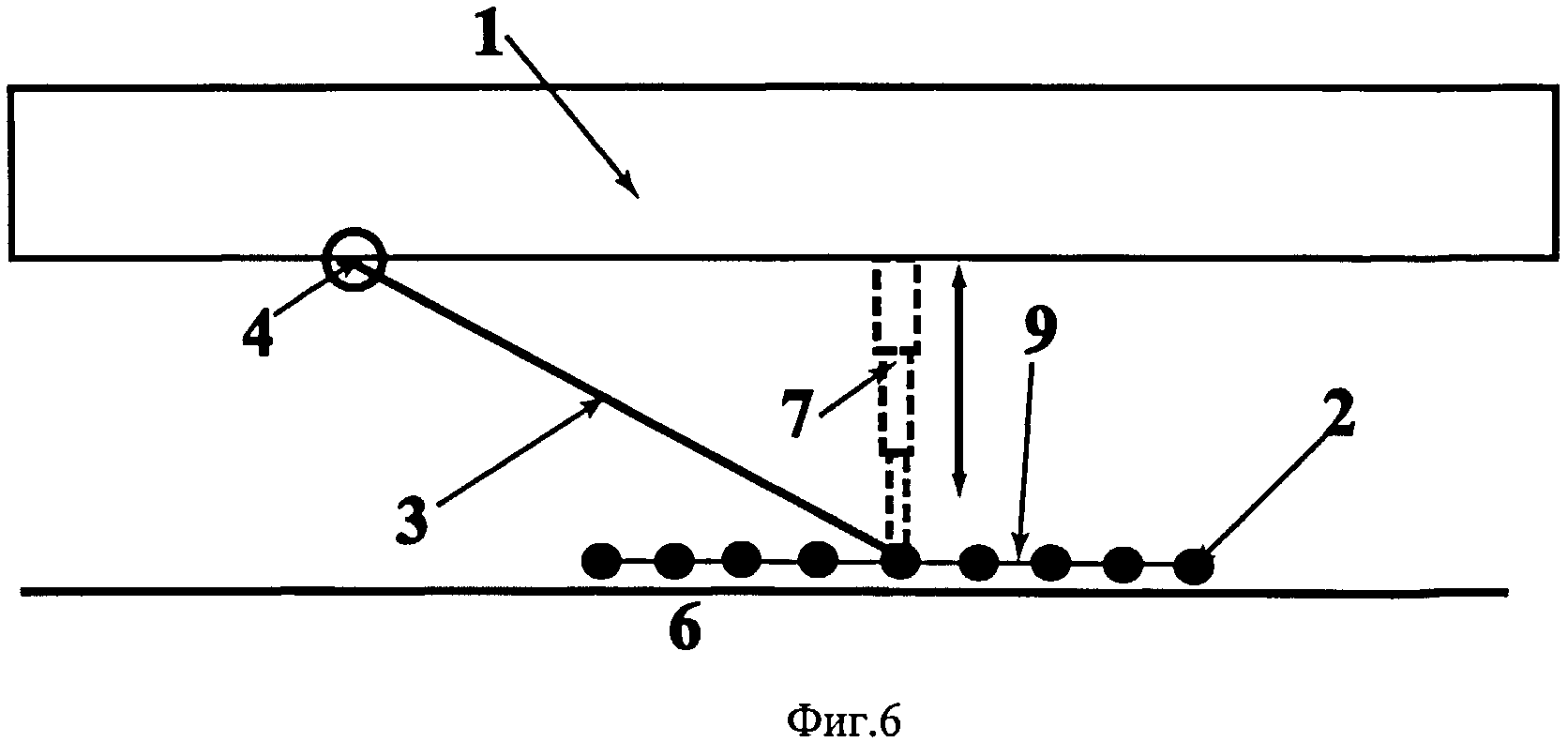
На фиг.6 изображен блок 9 с приемниками 2, соединенными с удлиняющим кронштейном 3. Один из концов кронштейна 3 подвижно соединен с помощью шарнира 4 к корпусу 1, а другой соединяется с блоком 9 приемников. Изменение угла наклона кронштейна 3 и изменение расстояния от блока приемников 9 до стенки ствола скважины 6 может быть осуществлено путем изменения длины удлиняющего гибкого кронштейна 7, соединенного с блоком приемников 9 и корпусом 1. Такой вариант реализации прибора может использоваться для измерения дефектов пласта/обсадной колонны или расчета анизотропных свойств пласта путем прижатия блока 9 приемников к стенке ствола скважины 6. Блок 9 с приемниками 2 может быть выполнен в виде жесткой штанги или пластины, в том числе изогнутых. При реализации блока 9 в виде штанги не менее двух приемников 2 жестко закреплены вдоль нее на фиксированном расстоянии друг от друга. При реализации блока 9 в виде пластины не менее двух приемников 2 закрепляются на ней в плоскости пластины на фиксированном расстоянии друг от друга. Угол наклона кронштейна 3 и расстояние блока 9 до стенки скважины 6 регулируются удлинением кронштейна 7. Кронштейн 7 может представлять собой гибкую телескопическую штангу, длина которой может регулироваться, например, с помощью пневмонасоса.
Процесс измерений с помощью данного устройства реализуется следующим образом. После установки устройства в точке измерения вдоль скважины производится удлинение кронштейнов 7 (например, с помощью электромотора или пневмонасоса). Данное удлинение приводит к изменению угла между кронштейном 3 и корпусом 1. Это позволяет контролировать радиальное положение блока 9 приемников 2, зафиксированных на конце кронштейна 3, и менять радиальное и осевое положение приемников 2, а также прижимать блок 9 к стволу скважины 6.
После установки блока 9 приемников 2 в требуемое положение происходит возбуждение акустического сигнала излучателем и проводится измерение и запись компонент волнового поля.
Описанные действия могут быть повторены для проведения измерений поля в точках с другими значениями осевых, азимутальных и радиальных координат.
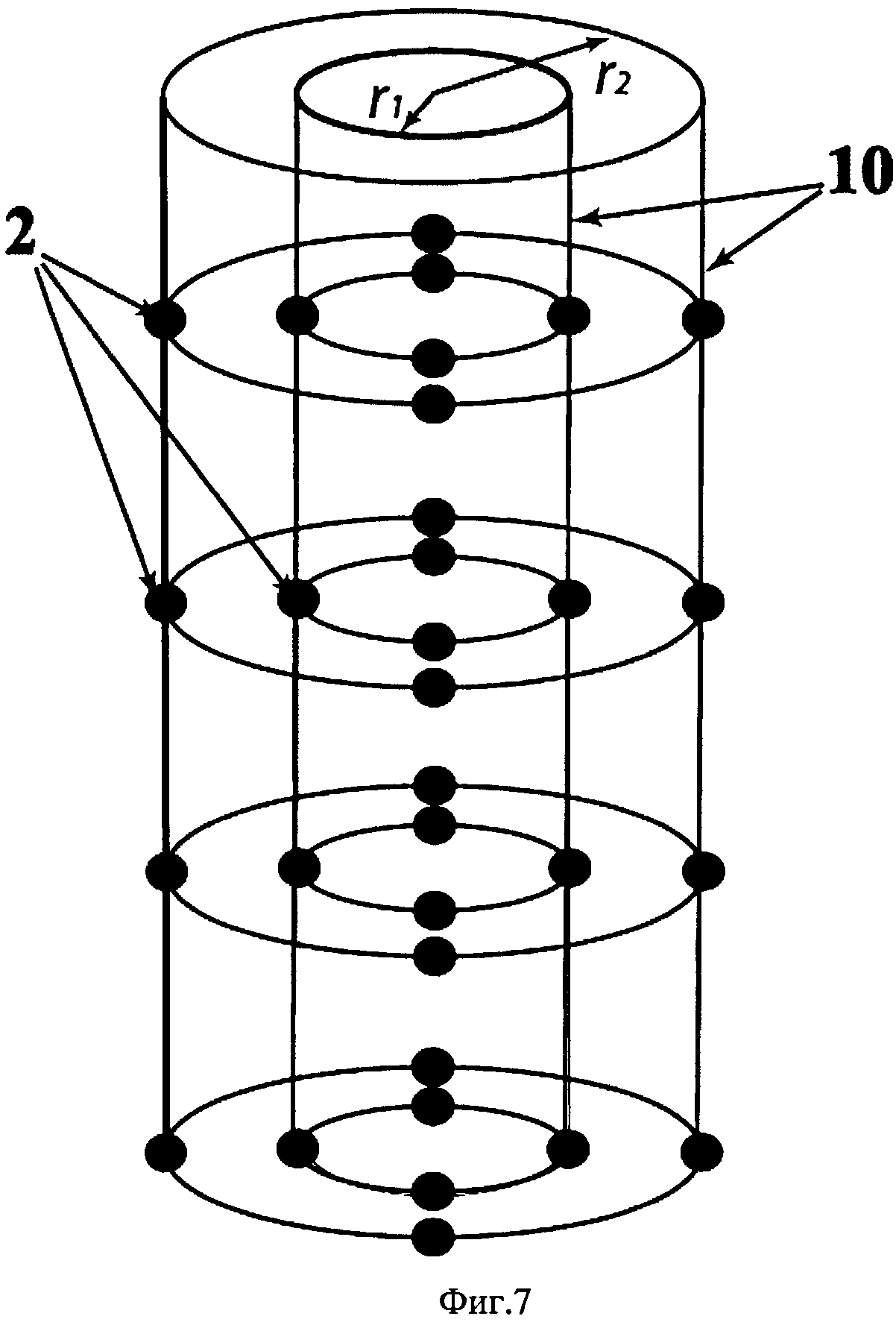
На фиг.7 изображен иной вариант реализации изобретения с измерением волнового поля в точках с различными радиальными, азимутальными и осевыми положениями. Приемники 2 расположены таким образом, чтобы некоторая часть от всех приемников 2 располагалась на одной из двух (или более) сеток 10 с радиусами r1 или r2 (или ri, где i является натуральным числом) на узлах с разными азимутальными и осевыми координатами. Оставшаяся часть приемников 2 распределяется на другой (других) сетках. Отношение числа приемников, расположенных на каждой сетке, к общему числу приемников может быть различно. Одним из возможных способов является расположение равного числа приемников 2 на каждой сетке, таким образом, чтобы измерения проводились в точках с аналогичными осевыми и азимутальными координатами на каждой сетке. Роль сетки с минимальным радиусом ri может выполнять кожух прибора, выполненный аналогично стандартным приборам для каротажа.
Такое устройство не имеет подвижных элементов, что обеспечивает большую надежность, чем устройства с удлиняющими кронштейнами. Кроме того, соответствующие узлы на данных сетях могут быть соединены с помощью ленты с приемниками (аналогично изображенному на фиг.5). Главное отличие процесса измерений от измерений с помощью стандартных приборов для акустического каротажа состоит в большем объеме данных, получаемых при измерении волнового поля приемниками 2, расположенными на различных расстояниях от устройства.
Далее будет описан пример алгоритма реконструкции поля давления в жидкости, который может быть применен, например, к реализациям устройства, показанным на фиг.1, 2, 3, 4 и 7. Он позволяет определить некоторые физические параметры, относящиеся к свойствам распространяющихся волн (азимутальное и осевое волновое число n и k) и упругим параметрам бурового раствора (например скорость волн в растворе Cf). Следует отметить, что Cf не может быть определено, если отсутствует информация о поле давления в точках с различными радиальными координатами. Это означает, что для оптимального анализа волнового поля необходимо провести измерения на различных радиусах.
Рассмотрим модель заполненной флюидом скважины радиуса 0.1 м в пласте песчаника, где геометрические и упругие параметры имеют следующие значения:
Вода: плотность ρf=1000 кг/м3; скорость волн Cf=1500 м/с;
Песчаник: плотность ρf=2200 кг/м3; скорость сдвиговых волн Ct=1840 м/с; скорость продольных волн Ct=2920 м/с.
Измерение давления выполняется по крайней мере в четырех точках флюида с координатами (r1, θ1, z1), (r2, θ2, z2), (r1, θ1, z2), (r1, θ2, z1). В случае доминирования в сигнале одной из нормальных мод, распространяющихся в скважине, значение давления можно представить следующим образом:
,
,
,
,
где n - азимутальное волновое число для выбранной моды, k - осевое волновое число,
a) Если r1=r2, θ1=θ2 и .
Решив данное уравнение, можно получить значение волнового числа k (или величину, обратную скорости вдоль оси скважины).
b) Если r1=r2, z1=z2 и
Решив данное уравнение, можно получить значение n.
c) Если r1≠r2 и или .
Решив данное уравнение, можно получить значение β или Cf. В отличие от традиционных каротажных установок, где расчет скорости звука в буровом растворе является непростой задачей, представленный способ позволяет вычислить скорость звука из данных всего лишь двух приемников.
d) Введя найденные значения k, n и β в формулу для давления во флюиде, можно получить формулу для вычисления давления в любой точке (rx, θx, zx) флюида:
Следовательно, для реконструкции полного волнового поля, образованного сигналом некоторой моды скважины, достаточно знать значение давления в одной точке и значения n, k и β, которые можно рассчитать из данных, полученных в других трех точках. Это означает, что информация о давлении в четырех точках с заданными позициями является достаточной для реконструкции всего поля, соответствующего распространяющейся моде. Несмотря на то что четырех точек достаточно для прогнозирования распределения давления, увеличение количества точек измерения позволяет избежать эффектов периодичности решения и обеспечит большую точность результатов.
Кроме того, представленный алгоритм позволяет вычислить скорость звука в буровом растворе.
Можно увидеть, что описанный алгоритм работает надлежащим образом только в том случае, если соблюдены некоторые условия для положения точек (например, в a ). Это связано с периодической зависимостью распределения давления по всем трем координатам. Следует избегать данной периодичности во время измерения.
Измерение волнового поля распределенными в пространстве приемниками может быть полезно в случаях анизотропных пластов и неидеальных скважин (например, овальных скважин), благодаря более точному анализу данных, полученных при измерении радиального профиля давления.
Реферат
Изобретение относится к области геофизики и может быть использовано для определения свойств горных пород в процессе акустического каротажа. Акустическое каротажное устройство содержит по меньшей мере один излучатель и по меньшей мере два приемника, причем приемники расположены в точках с разными азимутальными координатами и выполнены с возможностью проведения измерений волнового поля в точках, расположенных на разных расстояниях от вертикальной оси устройства. Приемники могут быть установлены с возможностью изменения их азимутального или радиального положения в процессе измерений, а также с возможностью изменения их положения по осевой координате. Технический результат - повышение точности данных каротажа за счет обеспечения возможности пространственного измерения распределения поля давлений или других компонент волнового поля по всем трем координатам, включая измерения на разных радиусах. 22 з.п. ф-лы, 11 ил.
Комментарии