Способ получения вертикальных сейсмических профилей в ходе бурения скважин - RU2144684C1
Код документа: RU2144684C1
Чертежи






Описание
Изобретение относится к сейсмической разведке для получения данных о характеристиках литологических формаций, пересекаемых при бурении скважины, посредством измерения распространения сейсмических сигналов через пласты.
Такое определение в принципе основано на определении времен обнаружения отраженных сигналов, соответствующих сигналам, генерируемым сейсмическим источником, образованным вибрациями или импульсами упругой энергии, после их отражения от геологических пластов на различной глубине. Соответствующая система включает в себя сейсмический источник и несколько приемников, принимающих прямые и отраженные сигналы, распределенных вокруг скважины, а также устройства обработки и интерпретирования отраженных сигналов, обнаруженных приемниками.
Используемая при бурении скважин, эта технология обнаружения, определяемая как вертикальное сейсмическое профилирование (ВСП), обеспечивает возможность получения представления о строении подземных пород в окрестности пробуриваемой скважины, исходя от отражения сигналов от пластов, составляющих породу. Положение различных подземных пластов определяют на основе времен задержки сигналов, принимаемых приемниками.
В результате обработки отраженных сигналов, в том числе компьютерной поддержки при обработке данных, появляется возможность получения информации о породах, пересекаемых проходимой скважиной, и о процессе самого бурения.
При традиционной технологии разведки ВСП бурение прерывают, трубы с инструментом извлекают из скважины, в скважину вводят один или более геофонов и генерируют один или несколько звуковых импульсов на уровне поверхности или на малой глубине, поблизости от скважины (например, подрывом взрывных зарядов) и регистрируют сигналы, пришедшие в геофоны, установленные внутри скважины. Такая технология не вызывает неопределенности в отношении "первичного сигнала", генерируемого на уровне поверхности, и принимаемых отраженных сигналов и не вызывает трудностей при интерпретации, однако имеет существенные недостатки. Процедура измерений является очень дорогостоящей, вследствие прерывания процесса бурения на значительный интервал времени, поэтому данная процедура может повторяться весьма редко за все время бурения. Операции извлечения труб и опускания их вновь в скважину являются очень сложными и сопряжены с риском, требуя соблюдения определенных мер безопасности и предосторожности.
В последнее время было предложено проводить такую разведку при использовании сигнала, генерируемого буровым инструментом в процессе бурения, в качестве сейсмического источника (см., например, патент США N 5050130).
Преимущество использования самого бурового инструмента в качестве сейсмического источника состоит в том, что измерения на поверхности можно вести в процессе бурения, без прерывания производственного процесса, и большое количество данных может быть собрано при малых расходах и невысоком риске, с частыми периодами обнаружения, или даже непрерывно. Однако на сигнал, генерируемый буровым инструментом, оказывают влияние возмущения в распространении волн. Кроме того, непрерывность во времени такого сигнала приводит к затруднениям в определении надежного сигнала от бурового инструмента, который должен сравниваться с эхо-сигналами, обнаруживаемыми детекторами, установленными на поверхности земли в области вокруг скважины.
На фиг. 1 показана
известная конфигурация характерных компонентов буровой установки и системы сбора сейсмических данных, где:
1 - конструкция буровой вышки,
2 - колонна буровых труб с буровым
инструментом на конце,
3 - буровой инструмент,
4 - поворотный стол, передающий вращательное движение колонне труб 2,
5 - электромотор привода поворотного стола,
6
- бассейн с раствором для бурения,
7 - насос для бурового раствора, протекающего внутрь колонны труб 2, вниз к буровому инструменту 3, где он выходит и поднимается обратно на поверхность
вдоль скважин,
8 - скважина, пробуренная инструментом 3 при движении его вниз сквозь породу, внутри которой бурильный раствор, подаваемый насосом 7, поднимается вверх на поверхность,
9 - линия детекторов-датчиков 10, которые принимают как прямой сейсмический сигнал, так и отраженные сигналы, генерируемые буровым инструментом, проходящие по земле, собираемые и регистрируемые
посредством регистратора 11.
Линия детекторов обычно определяется как "сейсмическая линия". Она располагается на некотором расстоянии от буровой, согласно критериям оптимизации, которые делают возможным получение сейсмических данных в области определенной площади вокруг буровой. Такая сейсмическая линия обычно образована геофонами, если буровая расположена на земле, или гидрофонами в случае буровой на воде.
Измеряемый отраженный сигнал связан с сигналом, генерируемым буровым инструментом, передаточной функцией, обычно с добавлением шума. Такой сейсмический источник обеспечивает значительные преимущества, если удастся выделить сигналы от бурового инструмента, которые распределены во времени и искажены шумом внешней среды, генерируемым другими машинами и насосами, работающими на буровой, и отделить полезный сигнал от шума. Другими словами, задачей изобретения является обеспечение достаточно высокого отношения сигнал-шум для получения полезной информации о природе и конфигурации литологических формаций, пересекаемых пробуриваемой скважиной.
Данное изобретение основано на суммировании вкладов от большого количества данных, собранных детекторами-датчиками за дискретный интервал времени, для увеличения отношения сигнал-шум. Длительность интервала времени суммирования данных ограничивается тем фактом, что с течением времени буровой инструмент движется, опускаясь вниз. Такая технология имеет пределы своего применения практического характера. Например, бурение более мягких или менее компактных пород создает более слабые сигналы, и измерение приходится вести в течение более длительных интервалов. Но при этом скорость бурения обычно велика, и нужно соблюдать заданный интервал суммирования, чтобы не снизить пространственную разрешающую способность за счет существенного изменения положения бурового инструмента за время наблюдения.
Шум препятствует точному выделению сигнала от инструмента, и его влияние лишь частично уменьшается за счет суммирования отдельных вкладов сигналов за дискретные интервалы времени. Отношение сигнал-шум улучшается, но все же недостаточно. Шум можно подавить, зная его характеристики, например, определенную регулярность, или за счет того, что он характеризуется случайными шумовыми выбросами. Сигнал бурового инструмента содержит непредсказуемые компоненты вследствие случайного характера взаимодействия инструмента с породой в процессе бурения. Он имеет автокорреляционную функцию импульсного типа и может быть выделен на фоне шума окружающей среды.
Процесс обнаружения, соответствующий данному изобретению, основан на приеме отраженного сигнала (сигналов), посредством детекторов 10 и определения корреляции с измеренным сигналом, генерируемым буровым инструментом, после его обработки - посредством сбора и использования множества объединенных измерений сигнала инструмента, получаемых от нескольких детекторов и называемых "пилот-сигналами", чтобы получить полезный измеренный сигнал в чрезвычайно благоприятных условиях, который в свою очередь представляет собой новый пилот-сигнал, являющийся представлением сигнала от бурового инструмента.
Операция коррелирования состоит, с качественной точки зрения, в сдвиге во времени двух сигналов, подлежащих сравнению, пока не будет достигнуто их выравнивание при существенно сходных профилях сигналов. Если такая операция не дает полезного результата, то сравниваемые сигналы не коррелированы, т.е. корреляция между ними отсутствует. Операция автокорреляции состоит в сравнении сигнала с самим собой, чтобы распознать возможные эхо-сигналы или сигналы реверберации. Кросс-корреляция - это операция коррелирования пилот-сигнала и сигналов, собранных сейсмической линией.
Таким образом идентифицируется сигнал, образованный временной последовательностью импульсов (пиков интенсивности с положительным или отрицательным знаком). Он является концентрированным в один импульсный сигнал для каждого измеряемого геофизического события, например, прямой сигнал, испускаемый буровым инструментом, сопровождаемый отраженными сигналами. Этот сигнал в общем случае состоит из нескольких импульсов с хорошо идентифицируемыми относительными амплитудой и координатой времени.
Также следует принять во внимание тот факт, что пилот-сигнал на практике не является идеальным сигналом, т.к. пилот-сигнал имеет свою задержку за счет распространения от бурового инструмента до детектора, который его измеряет. Так как время корреляции является относительной задержкой между двумя сигналами, то для получения абсолютной задержки геофизических данных, замеренных в полевых условиях, нужно скомпенсировать задержку, уже имеющуюся в пилот-сигнале. Пилот-сигнал не является лишь последовательностью импульсов, генерируемых буровым инструментом, но также содержит повторения за счет явления реверберации, например, во внутренней области буровой вышки, которая имеет свою собственную характеристику упругих вибраций. Поэтому каждый полученный детекторами сигнал должен быть очищен от реверберационных повторов в ходе обработки, чтобы можно было восстановить полезный сигнал, генерируемый буровым инструментом.
Каждый измеренный сигнал, получаемый для определения пилот-сигнала, содержит шум внешней среды и случайные шумы, наложенные на сигнал от бурового инструмента. Обнаруженные детекторами сигналы должны обрабатываться для снижения такого шума и усиления сигнала.
На основе поставленной технической задачи, описанной выше, с учетом общих направлений этой технологии сейсмической разведки с использованием бурового инструмента в качестве сейсмического источника, ниже раскрыта система обнаружения, соответствующая данному изобретению, в отношении ее типовых компонентов, представленных на фиг. 1, иллюстрирующей без каких-либо ограничений возможный вариант осуществления изобретения.
В патенте США N 4954998, упомянутом выше, предложен способ активного вычитания шума из пилот-сигнала, соответственно которому шум принимается отдельным детектором, установленным на самой колонне буровых труб (предполагается, что детектор практически не воспринимает сигнал от бурового инструмента), посредством выбора полосы частот шума, его усиления и затем вычитания из пилот-сигнала.
Однако данное техническое решение не учитывает одновременное присутствие нескольких сигналов и шумов, распространяющихся по разным путям от различных источников. Данный известный способ представляет собой способ ортогонализации на основе отдельного измерения шума, присутствующего в пилот-сигнале, что, однако, не реализует статистической независимости. Фактически, для того, чтобы этот сигнал можно было без искажений вычесть из выходного сигнала, он не должен содержать остатков сигнала от бурового инструмента. Однако это условие на практике едва ли выполнимо.
Настоящее изобретение, в принципе, предусматривает подготовку пилот-сигнала, который затем коррелируется с сигналами, полученными с сейсмических детекторов 10. В известных способах детекторы, предназначенные для обнаружения пилот-сигнала, генерируемого буровым инструментом, в типовом случае устанавливают на колонне труб.
Выбор датчиков определяется тем, что если используется один детектор, посредством которого идентифицируют сигнал от бурового инструмента, то сигнал от него должен быть не только достаточно сильным (заметные пики должны иметь большую амплитуду), но и иметь хорошее качество (такие заметные пики не маскируются шумами, что затрудняет их идентификацию).
Посредством способа, соответствующего изобретению, предусматривающего объединение нескольких сигналов, чтобы разделить компоненты от различных физических явлений, оператор может использовать сильные сигналы, не ограничиваясь использованием сигналов без шумов, каковых может и не быть.
Заявленный способ обеспечивает возможность использования сигналов, в которых шумы и сигналы от бурового инструмента имеют спектры по мощности, которые могут быть сравнимыми, при условии, что сигналы и шумы отличаются статистическими характеристиками, определяемыми различными законами.
Согласно изобретению, пилот-сигнал получают и обрабатывают на основе обнаружения нескольких, по меньшей мере двух или более, сигналов с детекторов пилот-сигналов различных типов, как указано ниже.
Вибродатчики 13, установленные на вышке 1, например геофоны, датчики ускорений или одноосные или трехосные датчики, выдают информацию как о шумах внешней среды, так и об импульсах, генерируемых работающими буровыми инструментами, для обнаружения сигнала, передаваемого на вышку через колонну буровых труб, через соединение колонны с вышкой, состоящее из поддерживающих тросов 14. Фактически оказалось, что нет необходимости устанавливать датчики прямо на колонне труб, где их трудно и неудобно ставить и обслуживать вследствие непрерывного воздействия на колонну труб со стороны операторов.
Датчики 15 величины тока, например амперметры, измеряют мгновенное потребление электротока электромотором 5 поворотного стола 4. Скручивающие усилия, прикладываемые к компонентам буровой колонны, передаются на колонну, на поворотный стол, связанный с электромотором. Такие датчики выдают измеряемое значение переменной величины, отличной от параметра, измеряемого вибродатчиками 13, однако результаты тех и других строго коррелированны.
Датчики 16 давления устанавливаются в трубопроводе бурильного раствора, например в выходном трубопроводе от насоса 7. Вибрации, возбуждаемые буровым инструментом 3, распространяются по раствору в трубопроводах и достигают уровня поверхности. Распространение вибрации по трубам вводит временную задержку между приходом импульсов по раствору и тех же импульсов по стали колонны труб, и в меньшей степени подвержено явлению реверберации, которое сильно выражено при распространении по металлу.
Геофоны 12 или эквивалентные им вибродатчики устанавливаются на той же площадке, что и буровая колонна труб. Они предназначены для приема от земли, с разными амплитудами, амплитудой, как шумов от буровых механизмов, так и полезного сигнала от бурового инструмента.
Каждый из этих различных типов датчиков, используемый в сочетании с другими, обнаруживает сигнал, распространяющийся по разным средам: по стали буровой колонны, электрической цепи электромотора, по бурильному раствору и по земной породе, в которой идет бурение, причем каждая среда распространения оказывает различное влияние на отношение сигнал-шум.
Каждый из датчиков, используемых в комбинации друг с другом, выдает сигнал (или соответствующую зарегистрированную кривую) с временным смещением относительно других датчиков. В таких кривых компоненты отношения сигнал-шум предполагают различные веса, и, таким образом, эти компоненты могут быть отдалены друг от друга для получения сигнала от бурового инструмента, используемого для кросс-корреляции.
Каждый датчик, таким образом, выдает последовательность измеренных значений, выраженную либо в аналоговых, либо в цифровых величинах, далее определенную как "кривая".
Каждая кривая образована набором измеренных значений, выраженных в цифровой или аналоговой форме, характеризуемых двумя важными параметрами: значением интенсивности и моментом времени, что может быть представлено порядковым номером измерения в процессе осуществления измерений.
Величина интенсивности, согласно данному изобретению, может быть выражена соответственно используемым датчикам, как скорость частицы под действием упругой волны при распространении звука (при измерении геофонами), как давление (при измерении датчиками давления в трубопроводе) и как ускорение (при измерении датчиками ускорения), или, наконец, как электрический ток, потребляемый электромотором (при измерении амперметром). Другой измеряемой величиной может быть деформация, которая может измеряться прецизионными датчиками деформации.
Кривые, полученные от вышеперечисленных датчиков, оказываются когерентными друг с другом и делают возможным идентификацию пиков от бурового инструмента посредством коррелирования.
В предпочтительном варианте обнаружение и запись данных производится в цифровых величинах. Измеренные величины затем комбинируют друг с другом, чтобы получить пилот-сигнал, используемый для корреляционной обработки с сигналами, обнаруженными в сейсмической линии.
Пилот-сигналы согласуют по времени, или просто упорядочивают, времена проведения измерения могут обеспечить временное соответствие на основе порядка проведения замеров: данные измерений могут фильтроваться, чтобы сделать их подобными опорному сигналу с известной задержкой, которым может быть один из перечисленных выше пилот-сигналов.
Например, в качестве опорной кривой может использоваться кривая, получаемая с датчика 13, так как длина буровой колонны труб и скорость распространения звука в стали известны, и поэтому можно получить надежную величину задержки времени между ударом бурового инструмента и приходом импульса, соответствующего этому удару, в датчик 13.
Как уже сказано выше, датчики 12, 13, 15 и 16, предназначенные для наблюдения за сигналами, обеспечивающими формирование пилот-сигнала, дают N кривых Pj(ω), где j = 1 ... N, ω - частота, в виде преобразований в частотную область.
Преобразование в частотную область предусматривает разложение сигнала на элементарные синусоиды, присутствующие в нем, характеризуемые фазой и амплитудой.
Таким образом, чтобы описать каждую компоненту, необходимы два действительных числа, и поэтому используются комплексные числа.
Частотная область обеспечивает простоту корреляционной обработки сигналов, реализуемой путем вычисления, для каждой частоты, произведение первого сигнала на сопряженную комплексную величину второго сигнала.
И, кроме того, операция фильтрации осуществляется простым умножением спектра фильтра на спектр фильтруемого сигнала.
Таким образом, кривая P1(ω) с датчика 13 затем оценивается на основе величин P2(ω)...PN(ω) с использованием следующего метода.
После приближенного выравнивания пилот-сигналов, как функции времени, рассчитывают новые
величины:

Горизонтальная прямая означает усреднение по частоте, а составляющая e обозначает белый шум, т. е. постоянную частоту, которая добавляется к усредненному спектру мощности (Pj(ω)2), чтобы сделать устойчивой инверсию. Это довольно малая величина, не изменяющая в значительной степени спектр сигнала, но достаточная для того, чтобы предотвратить в областях отсутствия сигнала близкие к нулю значения знаменателя в выражении (1) и чрезмерное вырастание величины дроби (1). Эта дробь (1) представляет фильтр, который приводит сигнал Pj(ω) к сигналу P1(ω), дающему величину оценки

Каждая из величин

Простой способ комбинирования состоит в расчете суммы величин

Определенное таким образом значение усиливает коррелированную часть сигналов с датчиков пилот-сигнала. Если коррелированный шум для сигналов с датчиков пренебрежимо мал, оценка фильтрации является эффективной, и остаточный шум удаляют из операции суммирования. Если же, напротив, коррелированный шум для пилот-сигналов не является пренебрежимо малым, то будут иметь место искажения при фильтрации, которые связывают сигналы, поступающие от бурового инструмента, между различными датчиками пилот-сигнала. В этом случае может быть осуществлено остаточное вычитание шумов посредством описанной ниже процедуры обработки, которая позволяет использовать сигналы с высоким уровнем шума. Фактически этот способ обеспечивает комбинирование пилот-сигнала с увеличением отношения сигнал-шум при оценке сигнала хорошего качества и позволяет извлечь даже из весьма зашумленных сигналов значимый сигнал от бурового инструмента и удалить шум, присутствующий в этих данных.
Способ состоит в разложении пилот-сигналов на компоненты от нескольких физических явлений, которые суммируются в измерениях, получаемых датчиками. Различные пилот-сигналы комбинируются друг с другом с учетом того, что явления, создающие сигнал (пики интенсивности от механических или звуковых колебаний, давления или потребляемого тока - от бурового инструмента, боковых ударов элементов буровой колонны труб, шума на площадке буровой вышки и т.п. ), характеризуются различными статистическими распределениями.
Задачей способа является выделение из сигналов, измеренных датчиками пилот-сигнала, составляющих, обусловленных буровым инструментом, в том числе шума, создаваемого работой механизмов в установившемся режиме и боковыми ударами колонны буровых труб вдоль скважины, и других шумов при работе буровой, но не импульсов от бурового инструмента. Чтобы обеспечить разделение, можно использовать подтверждение независимости воспроизводимых процессов или подтверждение того, что воспроизводимые процессы имеют статистические характеристики, априорно конгруентные с указанной гипотезой.
В обоих случаях операции выполняются путем выравнивания пилот-сигналов друг с другом, так чтобы сравнивать по возможности развернутые соответствующие события ("развертка" - операция инверсной фильтрации, эффективно устраняющая реверберацию и многократные отражения сигнала бурового инструмента) для удаления имеющейся в сигналах реверберации, и по возможности отфильтровать, чтобы сделать импульсные характеристики индивидуальных каналов подобными друг другу.
Если мгновенное событие генерирует сигнал, который измеряется в канале, оно формирует не точно импульс, а сигнал в форме волны, обычно очень короткий во времени, который зависит от многих факторов, например, характеристик датчика, измеряемого размера, связи между датчиком и средой, в которой он используется и т.д. Поэтому могут быть созданы операторы фильтрации, которые компенсируют эти различия, исходя из знания характеристик инструментов, из непосредственных измерений, например с использованием оценки фильтров для ручного согласования сигналов от различных датчиков, как было сказано выше.
Операция разделения, как согласно способу подтверждения независимости, так и требованию конгруентности для простоты поясняется на примере двух пилот-сигналов P1 , и P2.
P1 = aS +bN;
P2 = cS + dN. (2)
образованных наложением сигнала S и шума N с весовыми коэффициентами a, b, c, d.
Процедура подтверждения независимости с успехом использует принцип, состоящий в том, что сигнал и шум не только ортогональны друг другу, но также статистически независимы. Значение ортогональности и статистической независимости подробно рассмотрено ниже.
Переменные x и y обозначают две случайные переменные, обычно называемые "стохастическими", т. е. их поведение характеризуется распределением вероятности.
Условие статистической независимости подразумевает, что
E[f(x)g(y)] = E[f(x)] E[g(y)], (3)
где f(x) и g (y) являются двумя
функциями любого рода, а E обозначает ожидаемую величину.
Для набора из M выборок ожидаемая величина E выражается с хорошим приближением выражением:

тогда как условие, выраженное в (3), подразумевает при корреляции между x и y следующее:
E[xy] = E[x]E[y] (5).
Применение к реальному случаю, который соответствует обработке сейсмических данных по данному изобретению, предполагает конкретное значение. В истинно реальном случае имеется не
ограничивающее условие, состоящее в том, что данные дают нулевую среднюю величину:
E[x] = E[y] = 0. (6)
и то же самое справедливо для их нечетных степеней:
E[x(2n+1)] = E[y(2n+1)] = n = 0, 1, 2, ... (7)
Из выражений (5) и (6) следует, что x и y ортогональны друг другу, т.е.
E[xy] = E[x]E[y] = 0 (8)
Аналогично, уравнения (3) и (7) обеспечивают, что взаимные моменты, выраженные первым членом уравнения (3), равны нулю для нечетных степеней более высокого порядка, чем первый порядок для случайных
переменных x и y.
С учетом вышеизложенного процедура обработки пилот-сигналов состоит в следующем.
В простом случае двух пилот-сигналов P1 и P2, которые комбинируются с подходящими коэффициентами (или весами), чтобы получить комбинации x и y, и с помощью уравнения (8) проверяют, коррелированы или нет восстановленные сигналы, определяемые таким образом, и затем проверяется их статистическая независимость. Такое подтверждение позволяет найти точку в массиве комбинаций (x, y), которая является решением искомой проблемы. Распространение на множество сигналов осуществляется увеличением размера массива комбинаций и количества проверок ортогональности и независимости.
Эта точка определяет весовые функции, с которыми должны комбинироваться пилот-сигналы, чтобы практически достичь статистической независимости, а не только получить отсутствие корреляции различных комбинаций, как это описано в известном уровне техники. Другими словами, посредством способа согласно изобретению выделяют сигнал от бурового инструмента посредством разложения сигналов с датчиков пилот-сигнала на статистически независимые события.
В соответствии с другим вариантом осуществления изобретения, еще один способ проверки состоит в разделении наложенных друг на друга процессов на несколько пилот-сигналов согласно выражению
(2), и проверке того, что восстанавливаемые процессы имеют статистические характеристики, конгруентные априорно гипотетическим, с учетом физической природы явления, за счет использования моментов n-го
порядка переменных x и y, которые для переменной x могут быть выражены как
mn = E[xn], x = 1 ... n. (9)
Фактически посредством использования статистической
гипотезы могут быть введены условия, относящиеся не только к первым моментам (средним значением) или вторым моментам (статистическое определение корреляции), но и к моментам более высоких порядков.
Еще один способ проверки использует "куртозис", который рассчитывается как момент четвертого порядка, деленный на квадрат момента второго порядка переменной. Комбинации полученных сигналов, которые подтверждают такие условия, тогда являются искомым решением.
Для пояснения может быть рассмотрен случай, когда сигнал от бурового инструмента и шум, наложенный на сигналы согласно выражению (2), имеют импульсную автокорреляцию и не коррелированы друг с другом. Они дают импульсный пик как автокорреляционной, так и взаимно-корреляционной функции сигналов (2), и поэтому невозможно узнать, в какой степени то или другое присутствует в таких сигналах.
Если шум и сигнал от бурового инструмента не имеют одной и той же статистики, и один из них, например первый, отличается изолированными импульсными сигналами (как это имеет место при боковых ударах колонны труб о стенку скважины), то куртозис является эффективным средством оценки, чувствительным к статистике высших порядков, представляя собой хороший показатель присутствия изолированных пиков. Это позволяет накладывать условия максимального (или минимального) куртозиса на комбинации сигналов (2) с подходящими коэффициентами, или, в более общем случае, для некоторых функций указанных комбинаций. Комбинация, и следовательно, весовые функции, которые ее определяют, которая удовлетворяет такому условию максимума или минимума, и является искомым решением, потому что она полностью разделяет процесс с более высоким куртозисом (например, шум, характеризующийся изолированными пиками) от процесса с более низким куртозисом (например, более однородный сигнал, исходящий от бурового инструмента). Тот же способ разделения справедлив и в противоположном случае, когда, наоборот, шум имеет большую равномерность, чем сигнал, идущий от бурового инструмента, и тогда процесс с большим куртозисом является сигналом от бурового инструмента.
Пилот-сигнал, обработанный в соответствии со способами, раскрытыми здесь, затем используется при кросс-корреляции между пилот-сигналом, представляющим первичный сигнал, и сигналами, полученными геофонами 10 сейсмической линии 9.
Результаты, получаемые посредством обработки, раскрытой выше, представляют собой качественный сейсмический сигнал в виде импульсов от бурового инструмента, отделенных от шумовых составляющих.
Примеры
Способ по данному изобретению был испытан в полевых условиях на буровой установке Казанова Стаффора 1 фирмы Агип
С.п.А. на территории муниципалитета Санта Маргарита Стаффора (PV).
Записи проводились в виде групп сигналов, каждая продолжительностью 24 секунды с общим временем примерно 500 секунд на каждую группу (20-21 запись). Записи начинались после каждых 2 метров подачи бурового инструмента.
Вид сверху буровой и положение различных приборов и соединений показаны на фиг. 2,
а конфигурация сейсмической линии показана на карте на фиг. 3. Такая схема была выбрана, чтобы идентифицировать и понизить шум, генерируемый внешней средой, т.е. шум, маскирующий шум, генерируемый
буровым инструментом. В частности, линия записи расположена в зоне, которая является наиболее "бесшумной" в смысле паразитного шума, например, от дорожного движения или других источников, связанных с
деятельностью человека в этом районе, как показано на карте с горизонталями высоты над уровнем моря, и имеет следующие параметры:
разнос, т.е. расстояние между соседними точками прослушивания,
равен 20 м;
геофоны на частоту 10 Гц;
каждая точка прослушивания линии записи или сейсмической линии имеет по 12 равномерно разнесенных геофонов (вертикальная компонента Z), сигналы
которых суммируются.
Приборы обнаружения сигнала, установленные на буровой, следующие:
дифференциальный датчик давления 16, установленный в ответвлении подающего трубопровода;
амперметр, установленный в цепи питания привода поворотного стола;
геофон 13 (вертикальная составляющая Z), жестко закрепленный на решетке фермы вышки.
Точки прослушивания на территории буровой образованы геофонами 12, в том числе с вертикальной компонентой (Z), и трехкомпонентные (x, y, Z), установленные по соседству с насосами бурильного раствора и электрогенераторами.
Линия записи спроектирована для установки на земле с разносом на одинаковых расстояниях в 10 метров с установкой группы геофонов на каждой второй станции, т.е. через каждые 20 м (т.е. на станциях с четными порядковыми номерами), начиная со станции 100 до станции 220 (фиг. 3). Линия записи начинается на расстоянии 100 м от буровой и идет в северо-западном направлении на 1200 м.
Операции сбора данных длились примерно 3 месяца. Было сделано 6633 записи длительностью по 24 секунды. Сигналы собирались в группы с интервалами, не всегда одинаковыми, примерно каждые 2 метра опускания бурового инструмента в процессе бурения, от уровня - 743 м и до уровня - 1837 м.
Собранные данные затем обрабатывались по описанной выше технологии цифровыми методами, чтобы распознать прямой сигнал от бурового инструмента, а также в связи с физическими характеристиками бурового оборудования.
Кроме прямого сигнала, идентифицировались другие компоненты, соответствующие отраженным сигналам от пластов ниже бурового инструмента, с помощью которых строился соответствующий ВСП.
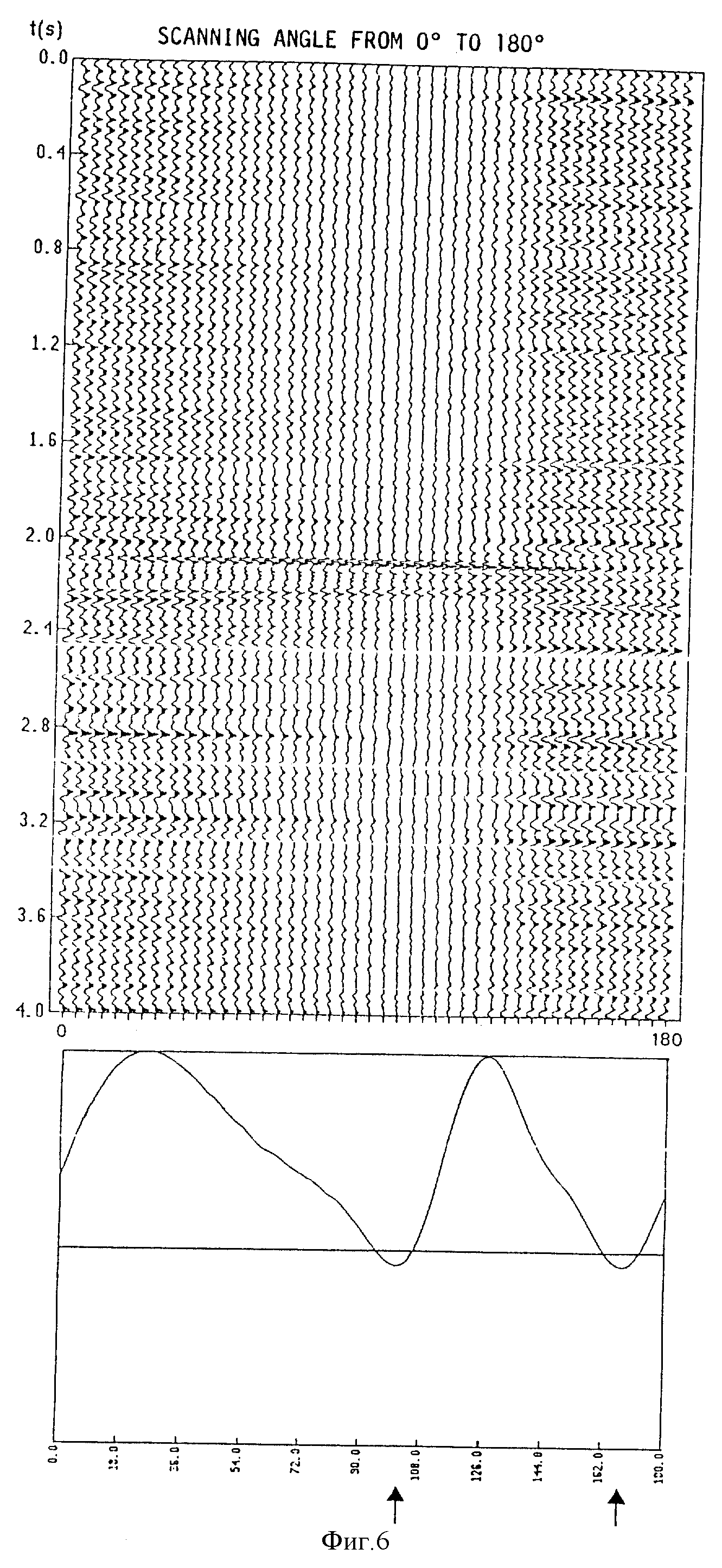
Результаты, представленные в последующих примерах, были получены обработкой отдельных записей, продолжительностью по 24 секунды, с временем выборок сигнала каждые 4 миллисекунды. На фиг. 4, 6 и 7 по оси абсцисс отложены углы в градусах, с которыми комбинировались учитываемые кривые пилот-сигнала, причем кривая первого пилот-сигнала умножалась на косинус этого угла, а вторая - умножалась на косинус этого угла и синус этого угла, и результирующие величины суммировались для получения комбинации.
Для проверки независимости нужно иметь две комбинации (при рассмотрении двух пилот-сигналов), соответственно приведенным выше уравнениям.
Их получают следующим образом: для каждой комбинации определяют другую комбинацию, которая наилучшим образом удовлетворяет условию ортогональности, затем для таких пар проверяют моменты более высокого порядка, с получением приведенных графиков.
По оси ординат отложена амплитуда, соответствующая максимальной величине контролируемого размера. Центральная линия представляет собой нулевую ось, величины выше нее являются положительными. Размер, определяемый в этом случае, является относительным отклонением, согласно формуле (3) для четных степеней x и y. Другими словами, определенный размер является разностью между первым и вторым членами уравнения (3), деленной на первый член того же уравнения, для четных моментов пар комбинаций, как указано выше. Если эта относительная разность равна нулю, то подтверждается условие независимости (3).
Что касается величин, отложенных на графиках корреляции на фиг. 4, 5, 6 и 8, временной диапазон по оси ординат t(S) представляет время корреляции, нулевое значение которого учитывается при 2 сек в диапазоне графика, другими словами, время 0,0 представляет время корреляции - 2,0 сек, время 4,0 представляет время корреляции 2,0 сек и так далее.
Фиг. 4 и 6 (верхняя часть) представляют корреляции, повторенные для различных комбинаций пилот-сигналов с одной и той же кривой сейсмической линии. В этом случае горизонтальная координата является тем же углом графика независимости (нижняя часть графиков).
На графиках по фиг. 5 и 8 наблюдается сигнал вдоль сейсмической линии. Горизонтальная координата на этих графиках представляет расстояние от буровой, которое изменяется в пределах показанных интервалов для заранее выбранных кривых.
Анализ приведенных ниже примеров показывает, что графики проверки независимости, отражая характер корреляций подтверждения, позволяют определить тенденции и точки разделения между процессами различной природы, при наблюдении вклада таких процессов в корреляциях подтверждения. В частности, для представленных значений можно наблюдать четкий импульсный сигнал, соответствующий прямому прохождению сигнала от бурового инструмента, который поступает спустя две секунды (в диапазоне графика). Кроме того, также очевидно отделение шума для соответствующих объединенных значений. Такие точки показаны стрелками в нижней части графиков.
Пример 1
Используемые пилот-сигналы соответствуют кривым, полученным с помощью датчика давления,
установленного в системе подачи бурильного раствора, и датчика-геофона, установленного на ферме вышки. Измерения проводились при работе бура на глубине - 864 метра (относительно поворотного стола).
Были проведены следующие этапы способа:
1. Сигнал датчика с вышки подвергался развертке;
2. Такой сигнал оценивался с использованием сигнала от датчика давления по
уравнению (1);
3. Оба обработанных таким образом сигнала комбинировались друг с другом с относительными весовыми коэффициентами, соответствующими повороту от 0o до 180o,
как показано выше, для определения пар (x, y) комбинаций, ортогональных друг другу;
4. Затем проверялась статистическая независимость по выражению (3) индивидуальных пар комбинаций, с
использованием следующего алгоритма:

На графиках, представленных на фиг. 4, нижняя часть представляет проверку условия статистической независимости. Первая точка, указанная левой стрелкой (абсцисса примерно 52o), и вторая точка, указанная боковой стрелкой (абсцисса примерно 127o), являются точками разделения.
На графиках, представленных на фиг. 4, верхняя часть графика представляет апостериорную проверку эффективности способа по данному изобретению, что выражается в корреляциях соответствующих комбинаций нижней части графика с трассой сейсмической линии с точкой прослушивания, удаленной примерно на 400 м. Для идентифицированных точек разделения, разделение шума от сигнала подтверждается: в полученных данных корреляции при значении угла 52o можно наблюдать пик минимума на трассе, а при значении на угле 126o пик корреляции сигнала почти полностью исчезает.
Пример 2.
Графики, иллюстрируемые на фиг. 5, представляют разделение сигнала и шума, получаемое при корреляционной отработке независимых комбинаций согласно проверке, проведенной для графиков по фиг. 4, посредством обработки сигналов с сейсмической линии, установленной вблизи скважины (горизонтальная ось абсцисс от кривой с левой стороны, соответствующей расстоянию 240 м от скважины, до кривой 54 с правой стороны, соответствующей расстоянию 1300 метров). Левая часть показывает шум, т.е. комбинацию, полученную для угла 127o, а правая часть показывает сигнал от бурового инструмента, т.е. комбинацию, получающуюся для угла 52o.
Пример 3.
На фиг. 6 представлены результаты, полученные при использовании в качестве пилот-сигнала сигналов кривых, полученных от геофона, установленного на площадке буровой, и геофона, установленного на конструкции вышки.
Измерения проводились при бурении на глубине - 864 м (относительно поворотного стола). Процедура обработки та же, что в примере 1. На графиках, представленных на фиг. 6, нижняя
часть представляет проверку условия статистической независимости, проводившуюся по алгоритму:

Первая точка и вторая точка были найдены при значениях по оси абсцисс примерно 105o и 165o, соответственно. Точки пересечения с горизонтальной осью, отмеченные стрелками снизу графика, показывают независимые комбинации, которые отделяют сигнал бурового инструмента от шума, как это было проверено по корреляциям с тестовой кривой, полученной из точки прослушивания на сейсмической линии на расстоянии примерно 400 м, что показано на верхней части графиков.
Пример 4.
В качестве пилот-сигналов использованы сигналы с амперметра и с
геофона, установленного на конструкции вышки. Измерения проводились при бурении на глубине - 1544 м, согласно следующим этапам:
1. Сигнал с вышки оценивался по сигналу амперметра с
использованием выражения (1);
2. Оба результирующие сигнала затем комбинировались аналогично примеру 1, так чтобы получить ортогональные пары (x, y) комбинаций;
3. Статистическая
независимость индивидуальных комбинаций проверялась по выражению (3), с использованием алгоритма из примера 3, как показано на фиг. 7;
4. Затем были получены развертки комбинаций, которые
представляют результат разделения (абсциссы при 73o и 156o).
Как показано на графиках, представленных на фиг. 8, такие трассы коррелируются с сигналами от сейсмической линии, расположенной на некотором расстоянии от скважины (от 880 м - трасса 40 до 1300 м - трасса 61, как показано в верхней части фиг. 8).
Фиг. 8 иллюстрирует сравнение между сигналом, полученным при использовании только одного пилот-сигнала с вышки, после его развертки (запись A), и восстановленными сигналами после разделения. Для этих данных был применен фильтр, удаляющий высокочастотные шумы, вводимые развертыванием, и более низкие частоты. В записи B показан шум с углом 73o. На записи C с правой стороны показан сигнал для угла 156o. Прямое прохождение сигнала в восстановленной форме показано в центральной части записи C, относительно соответствующей части записи A.
Реферат
Способ получения вертикальных сейсмических профилей земных пород, пересекаемых буровой скважиной, посредством использования в качестве сейсмического источника вибраций, генерируемых буровым инструментом, для получения высокого соотношения сигнал/шум посредством определения кросс-корреляции между сигналами от инструмента и сигналами, собранными линиями сейсмических геофонов, по которому сигнал от инструмента обрабатывают посредством размещения нескольких детекторов нескольких типов: вибродатчиков, амперметров, датчиков давления, установленных на трубопроводе, на буровой и вокруг нее, и таким образом записью нескольких кривых, в которых компоненты сигнал/шум имеют различные характеристики и могут быть разделены посредством ввода функций фильтрации, или посредством обработки их с помощью преобразований Фурье, или на основе их статистического распределения. 5 з.п.ф-лы, 8 ил.

Формула

где Pj(ω) - сигнал бурового инструмента, преобразованный в частотную область;
ω - частота;
Pi(ω) - опорный сигнал;

e - белый шум;

* - символ комплексного сопряжения;

и затем полученные таким образом величины Pj(ω) комбинируют и результирующие величины комбинаций используют в качестве пилот-сигнала от бурового инструмента для кросс-коррелирования с сигналами, собранными посредством сейсмической линии.
Комментарии