Компенсация склонения при сейсмических разведках - RU2557361C2
Код документа: RU2557361C2
Чертежи

























Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[001] По этой заявке, являющейся частичным продолжением заявки №12/719783 на патент США, поданной 8 марта 2010 года, испрашивается приоритет указанной заявки, включенной в эту заявку путем ссылки, приоритет которой, в свою очередь, испрашивается в соответствии с предварительными заявками на патенты США, №61/158698, поданной 9 марта 2009 года, №61/246367, поданной 28 сентября 2009 года и №61/261329, поданной 14 ноября 2009 года.
ПРЕДПОСЫЛКИ
[002] При обычных сейсмических разведках используют сейсмический источник и некоторое количество буксируемых кос, буксируемых позади сейсморазведочного судна. Эти буксируемые косы имеют датчики, которыми обнаруживается сейсмическая энергия для построения изображения пластов ниже морского дна. Выпуск буксируемых кос и источников и буксировка их в процессе разведки не представляют сложности при работе в свободных от льда водах, при умеренном волнении или в аналогичных ситуациях.
[003] Однако в морских районах, покрытых льдом, мусором, при наличии крупных волн или других препятствий разведка может стать более трудной, дорогой или даже невозможной. Например, в покрытых льдом водах сейсморазведочное судно должно прокладывать дорогу во льдах и лавировать в водах, заполненных обломками ледяного поля. Шум, создаваемый ударами льда, также может усложнять получаемую сейсмическую запись.
[004] В дополнение к этому обломки ледяного поля на поверхности воды делают буксировку источника и буксируемых кос более трудной и предрасполагают к повреждениям. Например, любые компоненты системы на поверхности воды могут наталкиваться на лед, затягиваться под лед и теряться. Кроме того, на поверхности любых кабелей или буксирных тросов, выпускаемых с судна, даже со слипов, может нарастать лед, потенциально повреждающий кабели или буксирные тросы. Более того, лед, затягиваемый под корпус и всплывающий позади судна, может сдвигать эти кабели и тросы. Некоторые способы выполнения сейсмических разведок в покрытых льдом районах известны из уровня техники и раскрыты в патентах США №№5113376 и 5157636 (Bjerkoy). Однако до настоящего времени проблемы, связанные с морской сейсмической разведкой в покрытых льдом или имеющих препятствия водах, не разрешены в достаточной степени.
[005] Например, в дополнение к некоторых физическим проблемам, встречающимся в арктических или покрытых льдом районах, вариации магнитного поля земли в любой конкретной области земли могут создавать проблемы при наземной и морской сейсмических разведках. Как известно, магнитное поле земли может быть описано семью параметрами, включая склонение (D), наклонение (I), горизонтальную напряженность (Н) поля, северную (X) и восточную (Y) составляющие горизонтальной напряженности поля, вертикальную напряженность (Z) поля, полную напряженность (F) поля, измеряемую в единицах нанотесла. Большая часть геомагнитного поля (то есть, основное поле) исходит из внешней части ядра земли. Различными математическими моделями, такими как международный эталон геомагнитного поля (МЭГП) и всемирная магнитная модель (ВММ), можно описать это основное поле и медленные изменения его с течением времени. Хотя изменения поля могут быть до некоторой степени предсказуемыми, геомагнитное поле также изменяется вследствие токов внутри магнитосферы и ионосферы и вследствие других изменений, которые менее предсказуемы.
[006] Вариации и изменения геомагнитного поля могут отрицательно влиять на сейсмическую разведку в арктических областях, а также в других местах. Например, на отсчеты по компасам с оборудования сейсмической разведки могут влиять различия в склонении на арктических широтах. Как известно, магнитное склонение представляет собой угол между магнитным севером и истинным географическим севером. Вариация склонения зависит от широты и долготы и изменяется с течением времени, а изменчивость азимута возрастает на арктических широтах.
[007] Как должно быть понятно, на месте нахождения компаса отсчет по компасу можно корректировать на основании магнитного склонения (угла между истинным севером и горизонтальной линией магнитного поля). Чтобы скорректировать компасный пеленг, истинный пеленг вычисляют путем добавления магнитного склонения к компасному магнитному пеленгу. К сожалению, в районах возле северного и южного магнитных полюсов могут получаться ошибочные или непригодные к использованию отсчеты по компасам, а в некоторых областях земли могут иметься большие расхождения склонения.
[008] Опубликованным магнитным моделям земли неизменно присущи погрешности или недостаточная точность, чтобы можно было достигать уровня детализации, необходимого в некоторых случаях. При обычной морской сейсмической разведке можно исключать проблемы путем использования замкнутого хода, при котором отсчеты по сигналам глобальной системы местоопределения (GPS-отсчеты) систематически получают на хвостовых буях, следующих за буксируемыми косами. Однако при разведке в арктических условиях в системе обычно нельзя использовать хвостовой буй из-за наличия обломков ледяных полей, так что в системе нельзя получать GPS-отсчеты на надежной основе. Это делает более проблематичным отслеживание местоположения оборудования сейсмической разведки и получение данных в водах со льдом и препятствиями.
[009] Объект настоящего раскрытия нацелен на исключение или по меньшей мере снижения влияния проблем, изложенных выше.
КРАТКОЕ ИЗЛОЖЕНИЕ
[010] Сейсморазведочная система эксплуатируется в районах или в периоды времени с вариациями склонения, которые могут вызывать погрешности измерений геомагнитного поля, выполняемых в процессе разведки. Например, в арктических областях земли могут иметься вариации склонения, которые могут изменяться в районе сейсмической разведки, и погрешности отсчетов по компасам могут создавать проблемы при морских сейсмических разведках в таких областях. Проблемы могут дополнительно усугубляться, когда в районе имеются воды со льдом, которым ограничивается использование хвостовых буев для получения отсчетов по сигналам глобальной системы местоопределения (GPS-отсчетов).
[011] Например, в морской системе в процессе разведки буксируемые косы буксируются судном. С компасов собирается информация для вычисления положений буксируемых кос в процессе морской сейсмической разведки. Как известно, компасами обеспечивается магнитный азимут, а местоположение их вычисляется в географической системе координат. Поскольку компасы чувствительны к склонению локального магнитного поля, при любых локальных расхождениях может понижаться точность реконструкции положений буксируемых кос на основании отсчетов по компасам. По этой причине в разведочной системе магнитное склонение измеряют в реальном времени в продолжение разведки, а измерения геомагнитного поля (например, отсчеты по компасам) корректируют в реальном времени или позднее при обработке.
[012] Коррекция за склонение может быть полезной при морских сейсмических разведках любого вида и даже при наземных сейсмических разведках. В частности, при выполнении морских разведок в арктических областях коррекция за магнитное склонение может быть особенно полезной, поскольку в системе не всегда можно использовать GPS-отсчеты с хвостовых буев или чего-либо подобного на буксируемых косах, чтобы определять местоположения датчиков. Вместо этого на буксируемых косах имеется некоторое количество кабельных компасов или других магнитных курсовых приборов, используемых для мониторинга положения буксируемых кос в процессе разведки. Чтобы можно было корректировать отсчеты по компасам без состоятельных GPS-отсчетов с хвостового буя, в разведочной системе определяется изменение текущего магнитного склонения, вызываемое вариациями в земной коре, атмосфере и т.п.
[013] Как отмечалось выше, в арктических областях в разведочной системе обычно нельзя использовать хвостовые буи для получения абсолютных положений (например, GPS-отсчетов) буксируемых кос из-за наличия обломков ледяных полей и других препятствий. Поэтому при разведке следует использовать незамкнутый ход. По этой причине в системе необходимо неукоснительно устранять погрешности отсчетов по различным компасам на всем протяжении буксируемых кос. В качестве одного решения управляемые аппараты на буксируемых косах можно периодически приводить к поверхности при отсутствии обломков ледяных полей или других препятствий, чтобы абсолютные положения (например, GPS-отсчеты) можно было получать и передавать в разведочную систему. Такой управляемый аппарат можно располагать в хвостовой части буксируемых кос или где-нибудь в другом месте.
[014] После получения GPS-отсчетов на периодической основе управляемый аппарат может погружаться обратно под поверхность для исключения столкновения со льдом и для поддержания защищаемой буксируемой косы ниже поверхности воды. В это время информацией об относительном положении с прибора инерциальной навигационной системы (ИНС), встроенной навигационной системы или другой аналогичной системы могут дополняться получаемые на периодической основе GPS-отсчеты, так что положение буксируемых кос можно определять даже в случае, когда значительные обломки ледяных полей на поверхности исключают получение новых GPS-отсчетов на управляемых аппаратах. Эта информация об относительном положении включает в себя инерциальные измерения для буксируемой косы, погруженной ниже поверхности воды.
[015] Наряду с этим в разведочной системе могут получаться измерения склонения и соответственно корректироваться отсчеты различных кабельных компасов и других датчиков на буксируемых косах. Для осуществления этого деклинометр, имеющий магнитометр, может быть развернут позади судна для получения измерений склонения. Например, деклинометр может буксироваться на конце кабеля буксируемой косы или буксироваться за кормой судна. Обычно такой деклинометр буксируют позади буксирующего судна на расстоянии, составляющем две или больше длины судна.
[016] В случае некоторых деклинометров вследствие проблем, связанных с перемещением деклинометра при буксировке, может чрезмерно усложняться обработка измерений, получаемых деклинометром. Например, может возникать необходимость коррекции на непрерывной основе отсчета магнитометра в зависимости от пространственной ориентации буксируемого магнитометра. При этом может возрастать сложность вычислений. Для исключения такой сложности компоненты деклинометра можно использовать непосредственно на буксирующем судне, даже если судно оказывает некоторое магнитное влияние на отсчеты склонения. Использование на судне возможно, когда различные этапы калибровки выполняют для компенсации влияния эффектов магнитно-мягкого и магнитно-твердого железа, наводимых судном на деклинометр.
[017] С деклинометра, предназначенного для использования на судне, получают отсчеты трех составляющих геомагнитного поля при использовании магнитометра, такого как аэронавигационный бесплатформенный 24-разрядный магнитометр Honeywell. В деклинометре также используется трехкомпасный прибор блока инерциальных измерений (БИИ) в добавление к вычислениям для компенсации влияния движения применительно к такому прибору. Наконец, в системе объединяются друг с другом GPS-отсчеты и инерциальные измерения (то есть, абсолютное положение и положение от инерциального прибора) и затем измерения сравниваются с отсчетом трех составляющих геомагнитного поля с магнитометра для вычисления поправок за склонение. В свою очередь, отсчеты различных кабельных компасов и других датчиков на всем протяжении буксируемых кос могут быть скорректированы с учетом этого вычисленного склонения.
[018] Поправку за склонение, определенную на буксирующем судне, можно использовать при морских сейсмических разведках в водах со льдом или препятствиями, а также при других применениях. В общем, способы, раскрытые в этой заявки, можно применять при морских разведках, когда хвостовой буй не может использоваться для получения GPS-отсчетов или когда такие отсчеты можно получать только время от времени. Например, в случае морской сейсмической разведки любого вида, при которой используют буксируемые косы, буксируемые на большой глубине или под углом относительно буксирующего судна, так что получение GPS-отсчетов для буксируемых кос становится невозможным, можно извлекать пользу из этих способов.
[019] Как отмечалось выше, при использовании измерения склонения с буксирующего судна для коррекции отсчетов кабельных компасов на буксируемых косах необходимо выполнять этапы калибровки для учета влияния судна на деклинометр. Вкратце, когда буксирующее судно идет по круговому маршруту, в процессе калибровки получают отсчеты с деклинометра и прибора блока инерциальной навигации. Затем отсчеты с прибора инерциальной навигации используют для коррекции угла тангажа и крена буксирующего судна. После этого в разведочной системе выполняется коррекция за эффекты магнитно-твердого железа от буксирующего судна и за эффекты магнитно-мягкого железа вследствие отличия окружающего магнитного поля земли на судне. С помощью программно реализуемых алгоритмов выполняют эти коррекции и определяют поправочные коэффициенты или параметры. Кроме того, кривую отклонения можно использовать для мониторинга магнитного поля, а геомагнитные обсерваторские данные в представляющей интерес области можно использовать для улучшения калибровки деклинометра.
[020] Полученные поправки за склонение можно применять к отсчетам от любого из различных приборов, используемых в процессе сейсмической разведки, таким как кабельные компасы, буксируемые косы и т.д. Различные отсчеты можно корректировать в реальном времени, а исходные данные для коррекции за склонение и коррекции отсчетов по компасам можно сохранять для последующего использования и обработки. Кроме того, отсчеты по компасам и аналогичные можно корректировать в реальном времени, так что в разведочной системе может лучше осуществляться мониторинг и регулирование буксируемых кос в процессе разведки.
[021] Принято считать, что поправки на широтах арктических областей могут составлять от 1 до 2°. Когда в систему включены многочисленные буксируемые косы, имеющие значительную протяженность, вариации по длине буксируемых кос могут усугубляться в процессе разведки. Поэтому возможность коррекции погрешности склонения может быть полезной при мониторинге и регистрации положений буксируемых кос в процессе сейсмической разведки. Наконец, при использовании коррекции можно получать точность, приближающуюся к 0,1%.
[022] В отличие от морских применений вариации склонения могут создавать проблему при наземных применениях, при которых используют магнитный курсовой угол. Склонение изменяется по пространству и во времени, а вариации могут усиливаться на арктических широтах, во время солнечной бури и т.д. Поэтому даже при наземных разведках могут быть получена польза от раскрытых способов.
[023] Приведенное выше краткое изложение не предполагается обобщающим каждый возможный вариант осуществления или любой аспект настоящего раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
НА ЧЕРТЕЖАХ:
[024] фиг. 1 - иллюстрация процесса коррекции за склонение сигналов сейсмической разведки;
[025] фиг. 2А-2В - виды сбоку и в плане морской сейсморазведочной системы в соответствии с некоторыми идеями настоящего раскрытия, предназначенной для использования в покрытых льдом районах;
[026] фиг. 2C-2D - виды сбоку морских сейсморазведочных систем, имеющих плавучее устройство и управляемые устройства различных видов;
[027] фиг. 3А-3В - иллюстрация управляемого устройства одного вида в двух рабочих состояниях;
[028] фиг. 4 - вид управляемого устройства согласно варианту осуществления настоящего раскрытия;
[029] фиг. 5 - иллюстрация внутренних деталей и компонентов управляемого устройства;
[030] фиг. 6А - вид сбоку морской сейсморазведочной системы, имеющей дистанционно управляемый буксируемый аппарат (ДУБА) в качестве управляемого устройства в хвостовой части буксирующих кос;
[031] фиг. 6В - вид в плане другой морской сейсморазведочной системы, имеющей дистанционно управляемые буксируемые аппараты на многочисленных местах буксирующих кос;
[032] фиг. 7А-7В - более детальные виды дистанционно управляемого буксируемого аппарата (ДУБА);
[033] фиг. 8 - структурная схема управляющей системы, предназначенной для регулирования дистанционно управляемых буксируемых аппаратов и определения местоположений их счислением пути при буксировке;
[034] фиг. 9 - иллюстрация контура управления для счисления пути и коррекции дрейфа в инерциальной навигационной системе применительно к буксируемому аппарату;
[035] фиг. 10 - иллюстрация буксируемой косы с расположенными на ней датчиками, предназначенными для определения формы буксируемой косы при использовании GPS-отсчета для судна, известных местоположений датчиков, известного местоположения управляемого аппарата и отсчетов по различным компасам;
[036] фиг. 11 - иллюстрация различных компоновок акустических систем при осуществлении акустической перекрестной связи для определения положений буксируемых кос;
[037] фиг. 12А-12В - схематичная иллюстрация элементов управляющей системы на буксирующем судне, имеющем компоненты деклинометра;
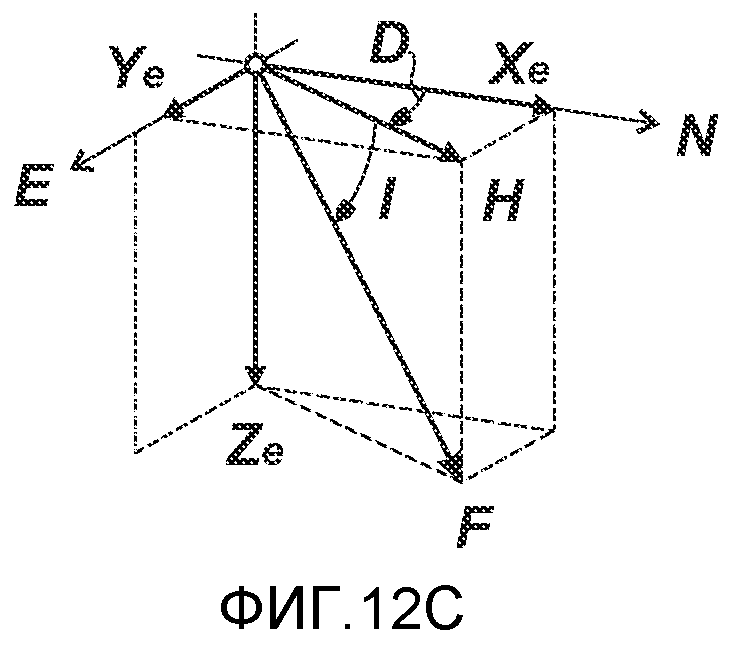
[038] фиг. 12С - схематичная иллюстрация геомагнитной системы координат;
[039] фиг. 12D - схематичная иллюстрация системы координат судна с углом пространственного положения, измеряемым относительно географического севера и горизонтальной плоскости;
[040] фиг. 13 - общая блок-схема последовательности действий при сейсмической разведке с использованием склонения, определяемого на судне;
[041] фиг. 14 - блок-схема последовательности действий процесса калибровки при определении склонения на буксирующем судне;
[042] фиг. 15А-15В - иллюстрации двух калибровочных маршрутов судна;
[043] фиг. 16А-16В - более подробная иллюстрация процесса калибровки;
[044] фиг. 16С - схематичная иллюстрация интерполяции склонения для района разведки на основании склонения от базовых станций;
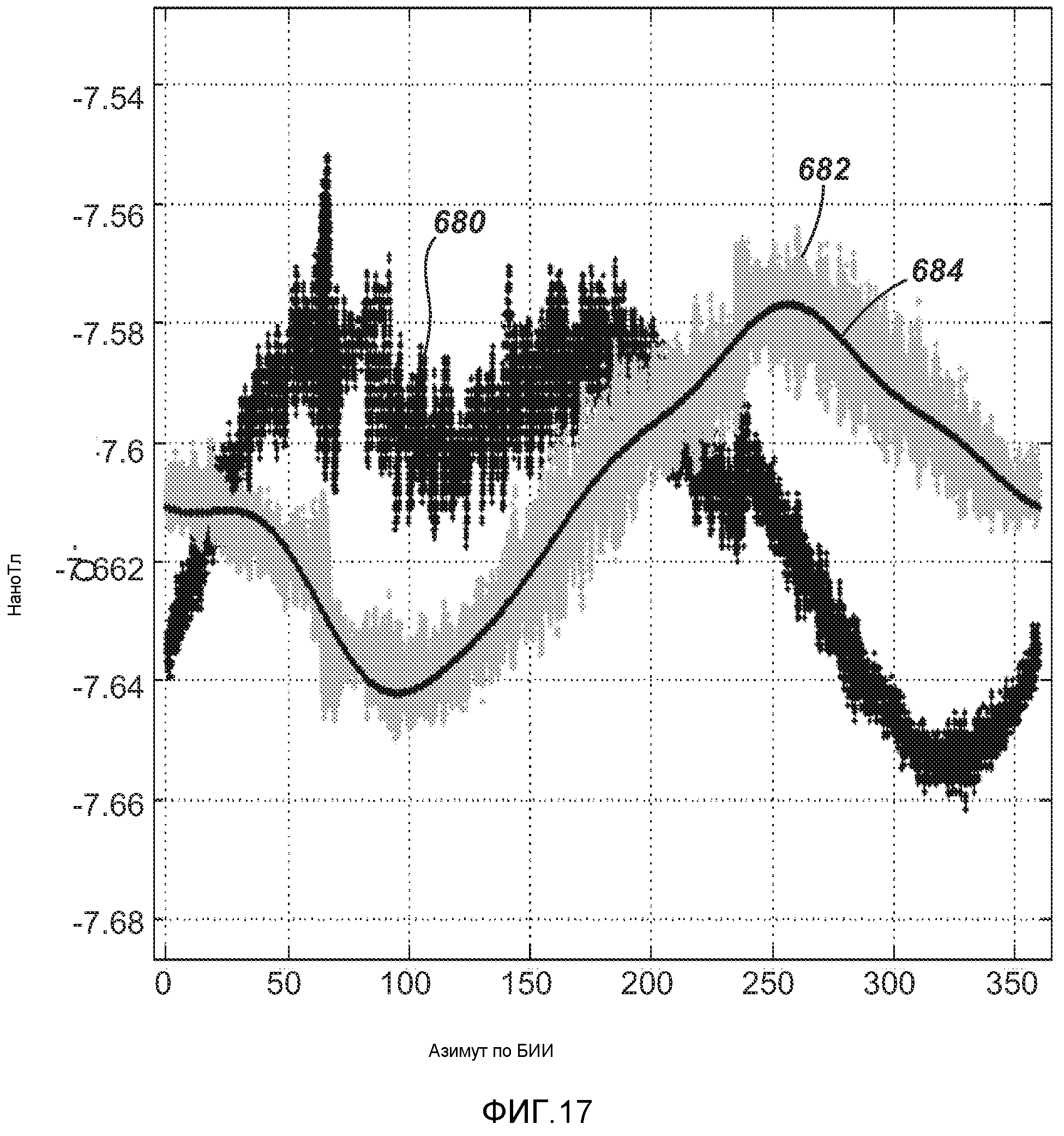
[045] фиг. 17 - графическая иллюстрация этапов, предназначенных для нахождения повернутой вертикальной составляющей (Mz) магнитометра как функции азимута по GPS-отсчетам/отсчетам блока инерциальных измерений при использовании кривой отклонения четвертого порядка ряда Фурье и метода наименьших квадратов;
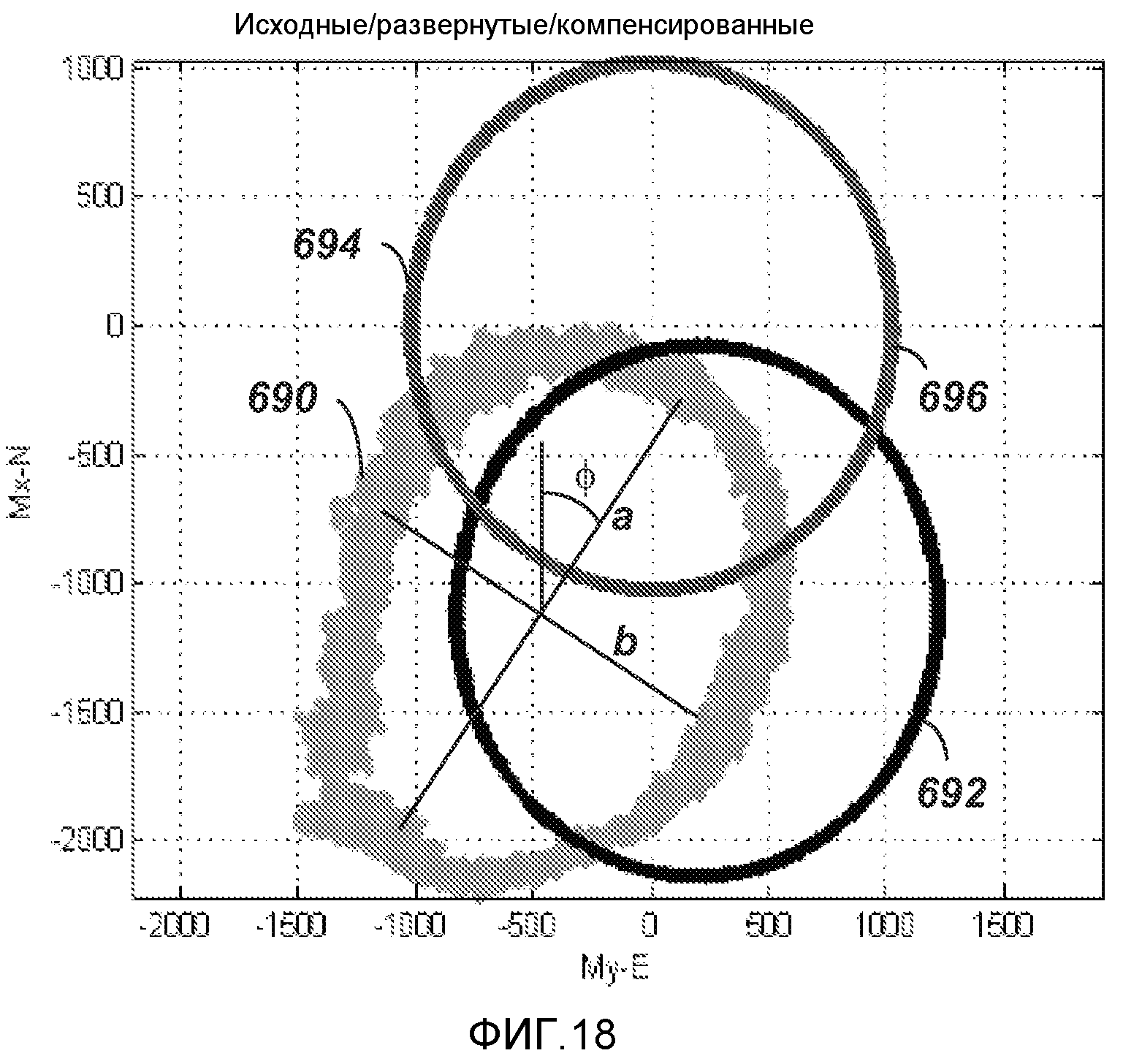
[046] фиг. 18 - графическая иллюстрация этапов, предназначенных для одновременного нахождения параметров горизонтальных составляющих (Mx, My) магнитометра методом наименьших квадратов, чтобы осуществлять компенсацию за влияние эффектов магнитно-твердого и магнитно-мягкого железа в горизонтальной плоскости;
[047] фиг. 19 - графическая иллюстрация этапов, предназначенных для определения взвешенных интерполированных кривых дельта-склонения для места калибровки;
[048] фиг. 20 - блок-схема последовательности действий при выполнении этапов обработки, предназначенной для коррекции за влияние склонения отсчетов по кабельным компасам при морской сейсмической разведке; и
[041] фиг. 21 - схематичная иллюстрация наземной сейсморазведочной системы согласно настоящему раскрытию.
ПОДРОБНОЕ ОПИСАНИЕ
А. КОРРЕКЦИЯ ЗА СКЛОНЕНИЕ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ
[050] При сейсмических разведках на суше или море используют датчики для получения сейсмических сигналов. В таких случаях изображение представляющего интерес подземного пласта можно формировать, когда при получении сейсмических сигналов местоположения этих датчиков известны. Во многих случаях измерения геомагнитного поля, такие как отсчеты по компасам, используют для определения местоположения, ориентации и курса сейсмических датчиков. Хотя склонение изменяется с течением времени и в различных местах на земле, изменение может быть более резко выраженным в определенных местах (например, в арктических широтах) или во время определенных событий (например, солнечной бури). Поэтому возможность коррекции за склонение в реальном времени для заданного пространственного места на земле может быть полезной при сейсмических разведках и может обеспечивать повышение точности результатов разведки.
[051] Для этого раскрыты система и способ для коррекции за склонение во времени и по пространству в процессе сейсмических разведок, которые могут быть наземными или морскими. На фигуре 1 показана блок-схема последовательности действий процесса 10 коррекции за склонение при сейсмической разведке. В процессе разведки сейсмические сигналы получают (блок 12) в районе разведки с помощью одного или нескольких сейсмических датчиков. В случае морской разведки датчики могут быть гидрофонами, расположенными на всем протяжении буксируемых кос, буксируемых позади судна, а сейсмические сигналы могут генерироваться источниками, такими как воздушные пушки, также буксируемыми позади судна. В случае наземной разведки датчики могут быть геофонами, расположенными на различных местах на грунте, а сейсмические сигналы могут генерироваться вибратором или другим сейсмическим источником.
[052] Для построения изображения представляющего интерес пласта с помощью сейсмических сигналов должны быть известны положения датчиков относительно источника. Для этого получают (блок 14) измерения локального геомагнитного поля, относящиеся к сейсмическим датчикам. Например, отсчеты по компасам можно делать на буксируемых косах в процессе морской сейсмической разведки. Кроме того, отсчеты можно делать на буксирующем судне или в других местах. В случае наземной сейсмической разведки отсчеты по компасам также можно получать, чтобы выполнять ориентацию датчиков и источников.
[053] Как известно, компасами и другими аналогичными датчиками дается магнитный азимут, но положения различных датчиков, источников и т.д., необходимые для построения изображения геологической среды, вычисляют в системе географических координат, таких как широта и долгота. Следовательно, отсчеты по компасам необходимо переводить в систему координат. К сожалению, компасы или аналогичные датчики чувствительны к склонению локального магнитного поля в районе разведки, так что при любом локальном несоответствии понижается точность реконструируемых местоположений компасов. Чтобы исключить это, измерения локального геомагнитного поля корректируют для учета склонения в районе разведки.
[054] Склонение изменяется с течением времени и на протяжении отдельных участков земли. Как отмечалось ранее, это может быть особенно ярко выражено в определенных областях земли или при определенных условиях. Поэтому измерения локального геомагнитного поля (то есть, отсчеты по компасам) корректируют (блоки 16-17) на основании временных и пространственных параметров склонения, которые определяют в соответствии со способами, рассмотренными в этой заявке. В конечном счете, можно сопоставить (блок 18) эти скорректированные измерения с получаемыми сейсмическими сигналами, чтобы можно было построить более точное сейсмическое изображение.
[055] Например, для коррекции за склонение при морской сейсмической разведке отсчеты по различным компасам, получаемые с буксируемой косы для определения местоположений датчиков, можно корректировать во времени и относительно текущего измерения склонения в представляющем интерес районе. Как рассматривается ниже, это может включать в себя калибровку деклинометра, развернутого на буксирующем судне, для исключения эффектов магнитно-твердого и магнитно-мягкого железа, чтобы текущие склонения можно было вычислять и использовать для коррекции отсчетов по компасам на всем протяжении буксируемых кос. Вычисления склонений с локальных базовых станции также можно использовать для интерполяции текущих склонений в районе разведки.
[056] Например, для коррекции за склонение при наземной сейсмической разведке различные отсчеты, получаемые для определения местоположений геофонов, можно корректировать во времени и относительно измерений текущего склонения в представляющем интерес районе. Как рассматривается ниже, это может включать в себя использование измерений деклинометра для локальных датчиков и интерполированного склонения с локальных базовых станций вблизи района разведки.
В. МОРСКАЯ СЕЙСМОРАЗВЕДОЧНАЯ СИСТЕМА
[057] С учетом понимания всего процесса коррекции за склонение при сейсмической разведке теперь обратимся к рассмотрению деталей морской сейсморазведочной системы и коррекций за склонения, которые можно выполнять с помощью ее.
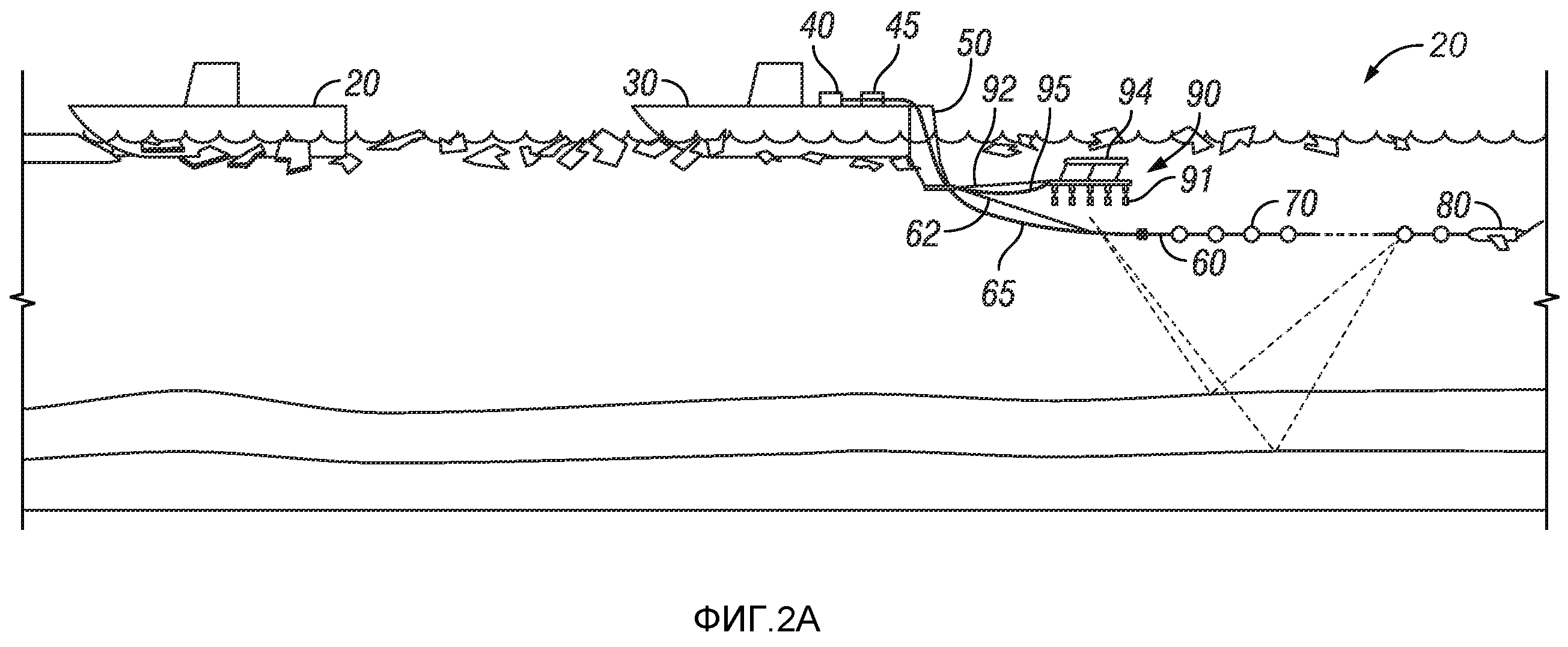
[058] На фиг. 2А-2В показана морская сейсморазведочная система 20, имеющая буксирующее судно 30, буксирующее некоторое количество буксируемых кос 60 с датчиками 70. Эта система 20 может быть аналогична обычной морской сейсморазведочной системе, используемой в типичных водных пространствах. Однако, как в частности показано, систему 20 можно использовать в покрытых льдом районах, имеющих глетчерный лед, паковый лед, ледяные поля или другие препятствия или заграждения на водной поверхности, которые могут взаимодействовать с буксируемыми компонентами морской сейсморазведочной системы. В этой конкретной системе 20 ледокольное судно 35 вскрывает ледяной покров перед буксирующим судном 30. В морских сейсмических системах различных видов, в которых в процессе разведки информация относительно положений буксируемых кос собирается с использованием измерений геомагнитного поля, таких как отсчеты по компасам и магнитометру, так или иначе можно получать пользу от коррекции за склонение, рассматриваемой в этой заявке.
[059] Когда буксирующее судно 30 буксирует буксируемые косы 60, с системы 45 электропитания приводится в действие источник 90, а сейсмическим регистратором в управляющей системе 40 записываются сейсмические данные, получаемые датчиками 70 на буксируемых косах 60. Продолжающийся ниже ватерлинии судна ледовый скег 50 удерживает точки крепления буксирных канатов 62/92 ниже поверхности воды. Кабели 65 буксируемых кос, соединенные с сейсмическим регистратором управляющей системы 40, протянуты с судна 30, и скег 50 направляет эти кабели 65 буксируемых кос под поверхность воды, так что лед не взаимодействует с ними и не собирается вокруг них.
[060] Сейсмический источник 90 имеет множество элементов 91 сейсмического источника, которые обычно представляют собой воздушные пушки. Кабель 95 питания, соединенный с системой 45 электропитания, протянут с судна 30. Буксирный канат 92 соединяет кабель 95 с ледовым скегом 50 и содействует буксировке источника 90 позади судна 30.
[061] Как дополнительно показано на фиг. 2В, параваны, стабилизаторы или заслонки 64 и распорка 66 могут использоваться для поддержания многочисленных буксируемых кос 60 позади буксирующего судна 30. Эти параваны 64 и распорка 66 также могут быть аналогичны обычным компонентам, используемым при морской сейсмической разведке, за исключением того, что предпочтительно, чтобы параваны 64 буксировались ниже поверхности воды.
[062] В процессе морской сейсмической разведки желательно определять и отслеживать положение и иметь возможность управлять положением буксируемых кос 60 для улучшения регистрации и картирования получаемых сейсмических данных. Определение абсолютного положения можно делать при использовании отсчетов (GPS-отсчетов) по сигналам глобальной системы местоопределения (системы GPS), получаемых на буксируемых косах 60 в процессе разведки.
[063] Однако в морской сейсморазведочной системе 20 согласно настоящему раскрытию получение GPS-отсчетов может оказаться трудным, поскольку система 20 погружена значительно ниже поверхности воды, так что приемники системы GPS (GPS-приемники) не могут работать на получение отсчетов. По этой причине в системе 20 имеются развертываемые устройства 80 на буксируемых косах 60 для содействия определению абсолютного положения буксируемых кос 60, а также для активного управления положением их. Кроме того, в отсчетах измерений геомагнитного поля, получаемых различными датчиками, таких как отсчеты по компасам вдоль буксируемых кос 60, могут иметься флуктуации склонения с течением времени и на протяжении района разведки. По этой причине в системе 20 используют способы коррекции за склонение, описываемые ниже.
[064] Теперь обратимся к рассмотрению развертываемых или управляемых устройств 80 нескольких видов, которые можно использовать на буксируемых косах 60 для получения GPS-отсчетов или же управления положением буксируемых кос 60 в процессе разведки.
1. ПЛАВУЧЕЕ РАЗВЕРТЫВАЕМОЕ УСТРОЙСТВО
[065] На фиг. 2С показана морская сейсморазведочная система 20, имеющая развертываемое устройство 80А первого вида согласно настоящему раскрытию. В процессе морской сейсмической разведки положения буксируемых кос 60 регулируют и контролируют, так что абсолютные положения группы датчиков 70 могут быть известны для надлежащей регистрации и анализа данных. Например, координаты хвостовой части буксируемой косы, определенные по сигналам системы GPS, можно использовать для координации положения каждого из датчиков 70 на различных буксируемых косах 60, а в управляющей системе 40 эти скоординированные положения могут использоваться при регистрации, анализе и контроле данных. Подходящей системой для регистрации, анализа и контроля является интеллектуальная система регистрации от ION Geophysical, в которой могут определяться положения буксируемых кос 60. В такой системе буксируемыми косами 60 можно управлять при использовании систем управления буксируемыми косами DIGIFIN™ и программного обеспечения командного управления ORCA®, которые можно получить от ION Geophysical. (DIGIFIN является зарегистрированным товарным знаком ION Geophysical, Corporation и ORCA является зарегистрированным товарным знаком Concept Systems Holdings Limited).
[066] В представленной разведочной системе 20 буксируемые косы 60 перемещаются погруженными ниже поверхности воды благодаря использованию скега 50 и других элементов, раскрытых в этой заявке. Тем не менее, все же необходимо определять положения буксируемых кос 60. Для получения положения отдельно взятой буксируемой косы 60 в системе 20 из фигуры 2С используют развертываемое устройство 80А, которое плывет на поверхности воды в хвостовой части буксируемой косы 60.
[067] Развертываемым устройством 80А может быть буй столбовидного вида, рассчитанный выдерживать удары льда и обломков ледяных полей на поверхности. Устройство 80А включает в себя приемник 82 системы GPS (GPS-приемник), который может получать координаты по сигналам системы GPS для развертываемого устройства 80А, когда оно буксируется позади судна 30 совместно с буксируемой косой 60. Для получения координат по сигналам системы GPS можно использовать обычные способы, известные в данной области техники, так что они не описываются подробно в этой заявке. Например, подробности, относящиеся к определению на основе системы GPS положения подводной буксируемой косы 60, можно найти в патенте США №7190634, который включен в эту заявку путем ссылки.
[068] При буксировке судном 30 буксируемой косы 60 источник 90 создает сигналы источника, а датчиками 70 обнаруживаются сейсмические сигналы. Управляющее устройство 40 получает координаты по сигналам системы GPS с развертываемого устройства 80А при использовании буксируемой косы 60 и других линий для связи и подачи питания к GPS-приемнику 82. Затем при использовании способов, известных в данной области техники, в управляющей системе 40 определяются положения буксируемой косы 60, датчиков 70, источника и других компонентов относительно судна 30 и физические координаты разведываемого района.
[069] Хотя в морской сейсморазведочной системе 20 использовано плавучее развертываемое устройство 80А из фигуры 2С, его использование обычно возможно при условии, что надводное устройство 80А рассчитано на столкновение с определенным количеством обломков ледяных полей, заграждением или чем-либо подобным. В противном случае надводное устройство 80А может затираться льдом, повреждаться при ударах, перемещаться со своего места или теряться. Поэтому в некоторых ситуациях можно использовать способное погружаться развертываемое устройство 80, описываемое ниже.
2. УПРАВЛЯЕМЫЕ РАЗВЕРТЫВАЕМЫЕ УСТРОЙСТВА
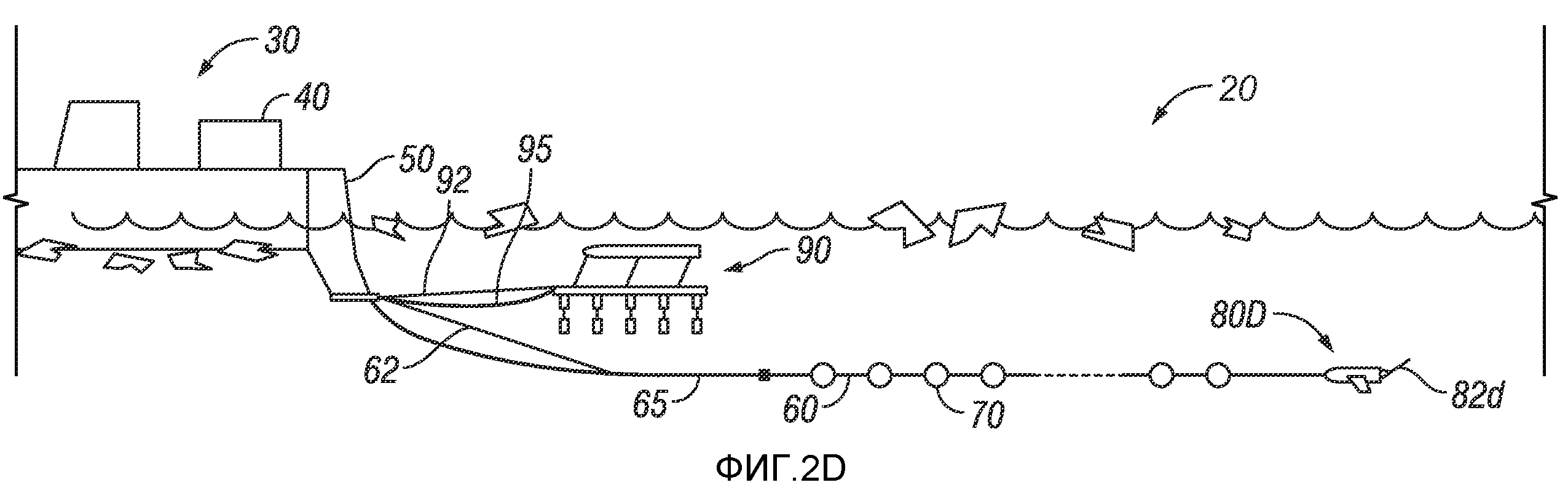
[070] Предполагалось, что предыдущие развертываемые устройства 80А плывут по поверхности. Можно также использовать другие устройства, раскрытые в заявке №12/719783 на патент США, включенной в эту заявку, и они могут иметь буи, плавучие якоря, кабель-тросы и т.д. Заметим, что морская сейсморазведочная система 20 на фигуре 2D имеет развертываемое устройство 80D, глубину погружения которого можно регулировать. В процессе разведки управляемое развертываемое устройство 80D буксируют в хвостовой части буксируемой косы 60 ниже поверхности воды для исключения столкновений с обломками ледяных полей. Для получения GPS-отсчетов развертываемое устройство 80D имеет GPS-приемник 82d, который может приводиться на поверхность путем регулирования глубины погружения устройства 80D. Поэтому развертываемое устройство 80D предпочтительно буксировать ниже поверхности на одной линии с буксируемой косой 60 и приводить к поверхности для получения GPS-отсчетов приемником 82d в соответствующие моменты времени.
[071] На фиг. 3А-3В показано ранее описанное развертываемое устройство 80D в двух рабочих состояниях. В стандартном состоянии глиссирования из фиг. 3А развертываемое устройство 80D следует под водой позади буксируемой косы 60. Это положение пригодно, когда на поверхности воды находятся обломки ледяных полей, препятствия или что-либо подобное, которые могут повреждать развертываемое устройство 80D или мешать ему. Когда поверхность очищена от льда, развертываемое устройство 80D можно поднимать на поверхность, вследствие чего GPS-приемник 82d может получать GPS-отсчеты. Для адекватного картирования группы буксируемых кос 60 и датчиков 70 эти GPS-отсчеты необходимо делать на периодических интервалах, чтобы можно было в достаточной степени отслеживать положения буксируемых кос 60 и датчиков 70.
[072] Развертываемое устройство 80D может быть управляемым аппаратом, устройством или глиссером. Например, в одной компоновке развертываемое устройство 80D может быть дистанционно управляемым аппаратом (ДУА), имеющим движительную систему и управляемые стабилизаторы или что-либо подобное для управления развертываемым устройством 80D до достижения заданного положения в воде при буксировке. Как вариант развертываемое устройство 80D может быть буксируемым глиссером, который перемещается вверх или вниз при использовании системы управления плавучестью, описываемой более подробно ниже. В качестве еще одного варианта развертываемое устройство 80D может быть дистанционно управляемым буксируемым аппаратом (ДУБА), лишенным движительной системы, но имеющим управляемые стабилизаторы, также описываемым более подробно ниже.
[073] Согласно этим принципам на фиг. 4-5 показаны варианты осуществления развертываемых устройств или управляемых аппаратов 150А-В для раскрытой морской сейсмической системы 20. Как показано на фиг. 4 и отмечалось ранее, аппарат 150А прикреплен к концу сейсмической буксируемой косы 60, с которой обеспечивается электропитание и связь для аппарата 150А. Для этого может использоваться кабель-трос 61. Стабилизаторы 154/156 на аппарате 150А могут быть подвижными, а аппарат 150А может иметь движительную систему 160, такую как винт. Как вариант стабилизаторы 154/156 не должны быть подвижными. Вместо этого в аппарате 150А может использоваться система управления плавучестью, описываемая ниже. Аналогично этому силовая установка может не использоваться в аппарате 150А, а система 160 на аппарате 150А фактически может быть тормозом, что также описывается далее.
[074] Как показано, аппарат 150А имеет обнаружитель 165, предназначенный для надводных обнаружения препятствий. Этот обнаружитель 165 может включать в себя гидролокатор, профилометр льда, оптический датчик, многолучевой глубиномер, камеру или что-либо подобное для обзора верхней полусферы и мониторинга препятствий (или разводий) над аппаратом 150А. Сигналы с обнаружителя 165 могут интегрироваться в навигационной и/или управляющей системе (непоказанной), такой как система Orca®, предназначенной для регистрации морских сейсмических данных. Таким образом, управляющая система может определять моменты, в которые поверхность над аппаратом 150А свободна ото льда и может выдавать сигнал для подъема аппарата 150А на поверхность воды.
[075] Например, в обнаружителе 165 можно использовать гидролокатор для обнаружения моментов, в которые лед присутствует на поверхности. Например, если лед определенной толщины присутствует на поверхности, гидролокационный обнаружитель 165 может обнаруживать этот надводный лед, и эту информацию можно затем использовать для определения, следует ли поднимать аппарат 150А или нет. Предпочтительно, чтобы гидролокационный обнаружитель 165 мог обнаруживать тонкий лед, то есть по меньшей мере толщиной меньше чем 1 м, хотя это зависит от его характеристик, чтобы аппарат 150А мог быть защищен от большей части надводного льда, который может присутствовать.
[076] Согласно еще одному примеру обнаружитель 165 может быть оптическим датчиком, обнаруживающим свет, имеющийся на поверхности, который может указывать на присутствие или отсутствие льда. Согласно этим принципам обнаружитель 165 может быть цифровой камерой, с которой на буксирующее судно подаются видеоизображения или изображения вдоль буксируемой косы 60. Хвостовые части буксируемых кос 60 могут находиться на значительном расстоянии от буксирующего судна и операторы не могут определять, где находятся буксируемые косы 60 и какой лед может быть над аппаратами 150А. Следовательно, операторы могут рассматривать видеоизображения или изображения с камеры 165 и, если имеется разводье, определять, следует ли поднимать или нет конкретный аппарат 150А. Кроме того, это можно делать дистанционно путем приведения в действие аппаратов 150А посредством сигналов, передаваемых с судна на аппараты 150А по буксируемым косам 60.
[077] Аппарат 150А также имеет GPS-приемник 152. Как показано, этот GPS-приемник 152 может быть расположен на направленном вверх стабилизаторе 154, так что антенна 152 может выступать над поверхностью воды, когда аппарат 150А глиссирует к поверхности для получения GPS-отсчетов. Независимо от того, в какой степени GPS-приемник 152 поднимается над поверхностью, GPS-отсчеты берутся и передаются на систему управления приборами для позиционирования буксируемой косы 60 и определения ее положения, чтобы данные регистрировались и анализировались надлежащим образом.
[078] Поскольку, как отмечалось в этой заявке, непрерывные GPS-отсчеты не всегда могут иметься, аппарат 150А может включать в себя инерциальную навигационную систему для сохранения направления, периодически определяемого по GPS-отсчетам. Кроме того, аппарат 150А может включать в себя деклинометр 167, который может быть связан кабель-тросом с концевой частью аппарата 150А для поддержания его на расстоянии от любой мешающей электроники. В деклинометре 167 можно использовать трехкомпонентный магнитометр для определения склонения в магнитном поле земли, и затем склонение можно корректировать относительно отсчета истинного севера, чтобы в системе управления приборами можно было определять абсолютное положение хвостовой части буксируемой косы 60 при отсутствии более состоятельных GPS-отсчетов, обычно используемых для этого. Вместо буксировки деклинометра 167 на конце буксируемой косы 60 деклинометр 167 можно буксировать непосредственно позади судна 30, что предпочтительно, обычно на расстоянии, составляющем 2,5 длины судна, чтобы уменьшать помеху от магнитного поля судна. Как будет описано позже, еще более предпочтительно располагать деклинометр на самом судне 30.
[079] Аппарат 150А периодически получает GPS-отсчеты при выходе на поверхность для получения данных системы GPS с помощью GPS-приемника 152. В таком случае при погружении в воду ранее полученные данные системы GPS могут использоваться в аппарате 150А вместе с данными инерциальной навигации, отсчетами по компасам и текущими данными инклинометра для определения в реальном времени или почти в реальном времени положения буксируемой косы 60 на текущей основе до того, как могут быть получены новые GPS-отсчеты.
[080] На фиг. 5 показаны некоторые внутренние детали и компоненты развертываемого устройства или аппарата 150В. На аппарате 150В стабилизаторы 154 выполнены неподвижными и в аппарате 150В не используется силовая установка. Вместо нее используется система управления плавучестью, имеющая объем (например, камеру 180) в виде свободно заполняемой водой хвостовой части аппарата 150В. Объем этой камеры 180 можно регулировать при использовании насосной системы 182 или аналогичной с тем, чтобы плавучесть аппарата 150В можно было изменять управляемым способом.
[081] Для изменения угла тангажа и крена аппарата 150В массу 170 можно сдвигать в осевом направлении вдоль длины аппарата 150В или поворачивать вокруг оси. Предпочтительно, чтобы масса 170 представляла собой реальную батарею, используемую для электронных компонентов аппарата, которые включают в себя серводвигатели и другие двигателя для перемещения массы 170.
[082] В противоположность GPS-приемнику из фиг. 4, GPS-приемник 152, показанный на фиг. 5, расположен на конце протяженного стержня или мачты 153. Этот стержень 153 может продолжаться вверх под углом относительно аппарата 150В, так что GPS-приемник 152 может выступать из воды, когда аппарат 150В глиссирует вблизи поверхности. Как вариант мачта 153 может быть сделана поворачивающейся в основании 155 от положения по потоку на одной линии с аппаратом 150В до положения с отклонением вверх. Когда аппарат 150В периодически приводится на поверхность для получения данных системы GPS, мачта 153 на этом основании 155 может поворачивать GPS-приемник 152 из воды.
[083] В общем случае аппарат 150В может иметь элементы, подобные элементам, используемым в аппаратах и дрейфующих профилометрах, которыми в океанических условиях измеряют глубинные течения, температуры и т.п. Как таковой, аппарат 150В имеет шасси (непоказанное), удерживающее систему 180 переменной плавучести, массу 170 и секцию 190 электроники. Изопикнический остов 157, соответствующий плотности морской воды, можно установить в секции на шасси. Затем остов 157 и шасси можно установить в стекловолоконный корпус 151, имеющий стабилизаторы 154 и обтекаемую форму. Мачту 153 для GPS-приемника 152 можно соединить с секцией 190 электроники и можно продолжить от корпуса 151.
[084] Как было выявлено при официально зарегистрированном применении, эти и другие управляемые развертываемые устройства 80 можно использовать в хвостовой части буксируемой косы 60 (как и на других местах). Когда устройства 80 в хвостовых частях приводятся к поверхности, на них можно получать GPS-отсчеты для определения положений буксируемых кос.
3. СИСТЕМА С ИСПОЛЬЗОВАНИЕМ УПРАВЛЯЕМЫХ РАЗВЕРТЫВАЕМЫХ УСТРОЙСТВ
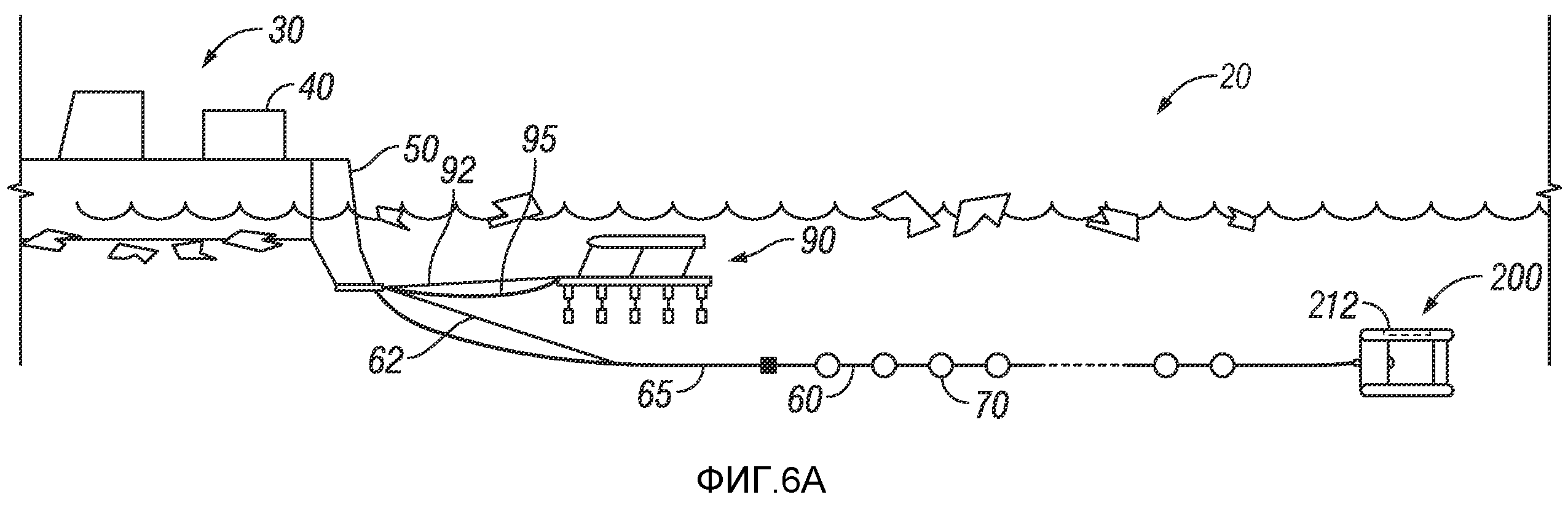
[085] Как отмечалось ранее, управляемые развертываемые устройства 80 можно использовать в хвостовой части буксируемых кос 60 для регулирования положений буксируемых кос 60. Как также отмечалось ранее, устройства 80 могут включать в себя дистанционно управляемые буксируемые аппараты (ДУБА), в которых отсутствует движительная система, но имеются управляемые стабилизаторы. На фигуре 6А показан вид сбоку морской сейсморазведочной системы 20, имеющей дистанционно управляемый буксируемый аппарат (ДУБА) 200 в качестве управляемого устройства в хвостовой части буксируемой косы 60. Дистанционно управляемый буксируемый аппарат 200 буксируется на конце буксируемой косы 60 ниже поверхности воды. Этот дистанционно управляемый буксируемый аппарат 200 также имеет GPS-приемник 212, который может получать GPS-отсчеты после приведения дистанционного управляемого буксируемого аппарата 200 к поверхности.
[086] На фиг. 6В показан вид в плане морской сейсморазведочной системы 20, имеющей дистанционно управляемые буксируемые аппараты 200 на многочисленных местах буксируемых кос 60. В этой системе головные дистанционно управляемые буксируемые аппараты 200А буксируются перед буксируемыми косами 60, а хвостовые дистанционно управляемые буксируемые аппараты 200В буксируются на концах буксирующих кос 60. Головные дистанционно управляемые буксируемые аппараты 200А присоединены с помощью буксирных канатов 62 и кабелей 65 буксируемых кос, выходящих из скега 50 судна. По желанию дополнительные промежуточные дистанционно управляемые буксируемые аппараты (непоказанные) могут быть развернуты в промежуточных местах вдоль буксируемых кос 60.
[087] Для выполнения работы в трех измерениях (даже в двух измерениях или четырех измерениях) каждый из головных дистанционно управляемых буксируемых аппаратов 200А индивидуально буксирует буксируемую косу 60. Буксирные канаты и кабели 62/65 буксирующих кос соединяют дистанционно управляемые буксируемые аппараты 200А со скегом 50 судна. В процессе разведки положение и глубина погружения каждого дистанционно управляемого буксируемого аппарата 200А-В могут регулироваться для поддержания надлежащего расположения группы буксируемых кос 60 при сейсмической разведке. В дополнение к этому регулирование глубины погружения позволяет исключить столкновение буксируемых кос 60 с любыми обломками ледяных полей на поверхности.
[088] При использовании дистанционно управляемых буксируемых аппаратов 200А-В на головных и хвостовых местах вдоль буксируемых кос 60 может облегчаться выпуск и выбор буксируемых кос 60. Например, будучи независимыми друг от друга, индивидуальные дистанционно управляемые буксируемые аппараты 200А-В могут направлять буксируемую косу 60 вниз под другие буксируемые косы 60 и могут приводить ее вверх на поверхность через середину группы буксируемых кос 60 на потенциально свободном от льда участке позади судна 30. После этого буксируемая коса 60 может быть выбрана на судно 30 и при этом можно избежать контакта ее с другими буксируемыми косами 60 и буксирными канатами 62. Это позволяет операторам выпускать и выбирать буксируемые косы 60 индивидуально и даже позволяет ремонтировать буксируемую косу 60 в то время, когда другие буксируемые косы 60 остаются в воде. При использовании единственного дистанционно управляемого буксируемого аппарата 200 в хвостовой части буксируемой косы 60, как в системе на фиг. 6А, выпуск и выбор можно производить аналогично.
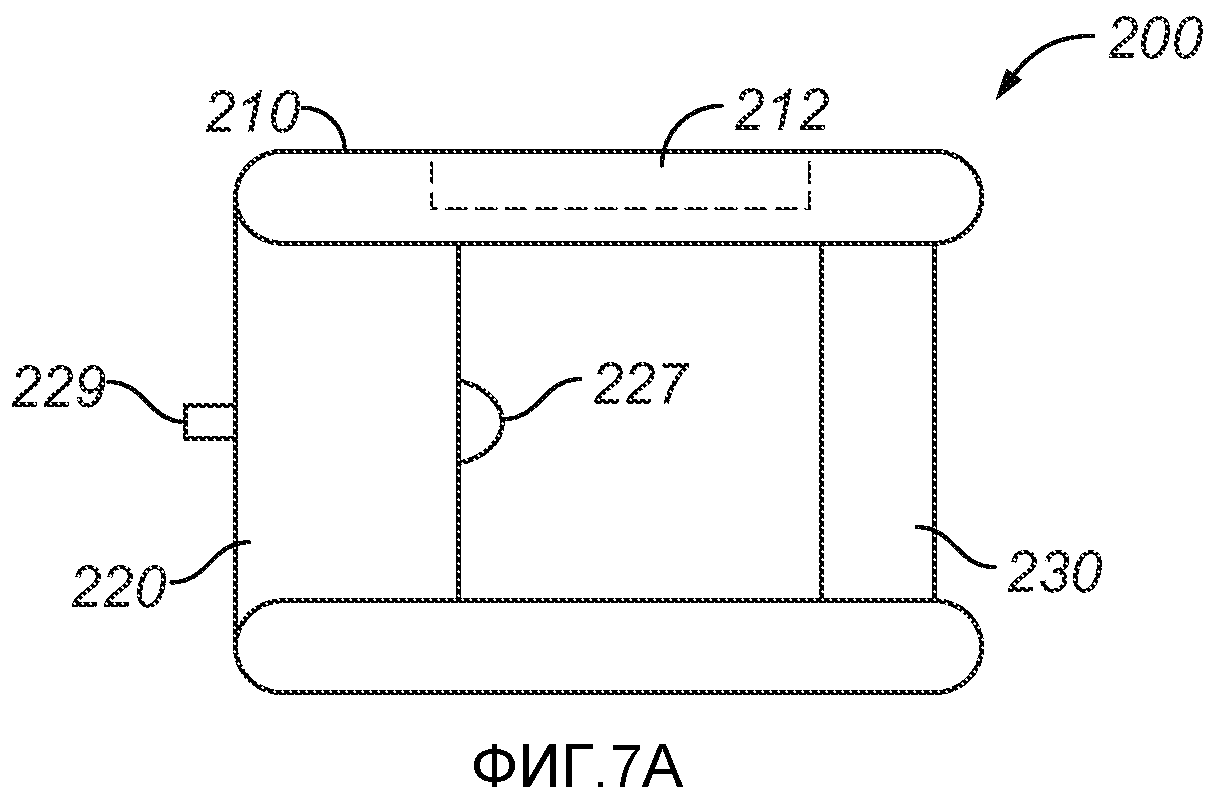
[089] На фиг. 7А-7В более подробно показан дистанционно управляемый буксируемый аппарат (ДУБА) 200 согласно одному варианту осуществления. В общем, этот дистанционно управляемый буксируемый аппарат 200 представляет собой устройство гибридного типа, включающее в себя элементы дистанционно управляемых аппаратов, автономных подводных аппаратов и глиссеров. Одним подходящим примером дистанционно управляемого буксируемого аппарата 200 является буксируемый ондулятор TRIAXUS, который можно получить от MacArtney Underwater Technology Group.
[090] Для буксировки дистанционно управляемого буксируемого аппарата 200 буксирный кабель (непоказанный), имеющий силовые провода и линии связи, соединен с передней кромкой 49 центрального подводного крыла 227. Как показано, дистанционно управляемый буксируемый аппарат 200 имеет четыре трубчатых элемента 210, соединенных в передней части подводными крыльями 220/225 и в задней части закрылками 230. Подводные крылья 220/225 и закрылки 230 имеют профиль крыла. Центральные подводные крылья 225 соединяют ведущие подводные крылья 220 и поддерживают горизонтальное подводное крыло 227 в передней части дистанционно управляемого буксируемого аппарата 200. Эти центральные подводные крылья 225 способствуют удержанию дистанционно управляемого буксируемого аппарата 200 выровненным по крену. Хвостовые закрылки 230 выполнены управляемыми, при этом верхний и нижний закрылки 230А-В регулируют угол тангажа, а правый и левый закрылки 230C-D регулируют рыскание.
[091] Четыре привода или двигателя (непоказанные), установленных в каждом из трубчатых элементов 210, перемещают эти закрылки 230A-D для регулирования угла тангажа и рыскания дистанционно управляемого буксируемого прибора 200, когда он буксируется. Трубчатые элементы 210 имеют отсеки 212 для размещения различных компонентов помимо двигателей, передаточных механизмов и датчиков положения закрылков 230A-D. Например, в этих отсеках 212 могут иметься GPS-приемник, инерциальная навигационная система, датчик глубины, датчик тангажа, датчик крена, датчик курса и т.д., рассматриваемые ниже.
[092] При буксировке горизонтальные закрылки 230А-В создают направленные вверх и вниз силы для перемещения дистанционно управляемого буксируемого аппарата 200 по вертикали, тогда как вертикальные закрылки 230C-D создают направленные вправо и влево силы для перемещения дистанционно управляемого буксируемого аппарата 200 по горизонтали (в поперечном направлении). Обычно дистанционно управляемый буксируемый аппарат 200 буксируется в нейтральном положении, при этом закрылки 230 периодически регулируются для поддержания дистанционно управляемого буксируемого аппарата 200 в том положении, в котором он находится. В некоторых ситуациях, таких как подъем на поверхность, требуется более активное перемещение закрылков, особенно при наличии соединения с буксируемой косой. Для торможения дистанционно управляемого буксируемого аппарата 200 можно использовать некоторые из способов, описанных ранее. В дополнение к этому или как вариант закрылки 230 можно поворачивать внутрь или наружу для повышения лобового сопротивления дистанционно управляемого буксируемого аппарата, когда он буксируется.
[093] На фиг. 8 схематично показаны элементы управляющей системы 300, предназначенной управления управляемыми аппаратами (например, дистанционно управляемыми буксируемыми аппаратами 200) и определения их положений при буксировке в морской сейсмической системе согласно настоящему раскрытию. Судовые компоненты 305 на судне 30 включают себя основную управляющую систему 310, которая имеет основной GPS-приемник 320 для получения GPS-отсчетов. Как и ранее, эта управляющая система 310 может быть системой управления приборами, такой как Orca®, которую можно получить от ION Geophysical. Управляющая система 310 сопряжена (или объединена) с управляющим блоком 330, который управляет различными аппаратами (например, дистанционно управляемыми буксируемыми аппаратами), используемыми при буксируемых косах в группе, и выполняет мониторинг их. Примером подходящего управляющего блока 330 для дистанционно управляемого буксируемого аппарата 200 из фиг. 7А-7В является надводный блок, используемый для дистанционно управляемого буксируемого аппарата TRIAXUS.
[094] Соединенный линиями 332 связи и питания управляющий блок 330 сопряжен с локальным контроллером 350 управляемого аппарата 340, такого как, например, дистанционно управляемый буксируемый аппарат 200 из фиг. 7А-7В или некоторое другое управляемое устройство, раскрытое в этой заявке. Контроллер 350 передает данные датчиков с датчиков 360 устройства на управляющий блок 330. После согласования навигационных инструкций с навигационной информацией в основной управляющей системе 310 управляющий блок 330 посылает их обратно к контроллеру 350, который соответствующим образом приводит в действие двигатели 370 различных стабилизаторов. Осуществление навигации управляемого аппарата 340 может включать в себя управление в реальном времени и заранее запрограммированные траектории.
[095] Контроллер 350 связан с встроенными датчиками 360 устройства и с двигателями 370 закрылков. Встроенные датчики 360 для управления устройством 340 включают в себя датчик глубины, датчик тангажа, датчик крена и датчик курса. Глубину погружения можно измерять датчиком давления, тогда как угол тангажа и крен можно измерять двухкомпонентными инклинометрами. Рыскание или курс можно измерять при использовании индукционного компаса и кроме того, можно использовать альтиметр.
[096] В дополнение к встроенным датчикам 360 контроллер 350 может быть соединен с датчиками положения, которые контролируют двигатели и закрылки, отслеживая положения этих закрылков с передачей данных по каналу обратной связи в управляющий блок 330. Все эти встроенные датчики (то есть, угла тангажа, крена, курса и положения вала двигателя) обеспечивают обратную связь к управляющей системе 310, чтобы осуществлять управление закрылками для направления управляемого аппарата 340 и удержания его от рыскания.
[097] В дополнение к этим датчикам контроллер 350 на управляемом аппарате 340 связан с GPS-приемником 380. Как отмечалось ранее, когда управляемый аппарат 340 приводится к поверхности, антенна GPS-приемника 380 может выходить на поверхность воды для получения GPS-отсчетов. Все же следует ожидать, что такие отсчеты будут делаться периодически. По всей вероятности, при использовании в покрытых льдом или засоренных водах управляемый аппарат 340 можно непрерывно буксировать под обломками ледяных полей в течение нескольких часов или даже дней до того, как его можно будет повторно поднять на поверхность для получения GPS-отсчетов. По этой причине управляемый аппарат 340 также имеет прибор 390 инерциальной навигационной системы (ИНС), используемый для определения относительного положения или места управляемого аппарата 340 в промежутках между непосредственными GPS-отсчетами, получаемыми GPS-приемником 380.
[098] В общем случае в приборе 390 инерциальной навигационной системы можно использовать компоненты, известные в данной области техники, такие как процессор, акселерометры и гироскопы, и использовать методы счисления пути для непрерывного определения положения, ориентации, направления и скорости управляемого аппарата 340. При этом в зависимости от продолжительности считывания пути управляемого аппарата 340 дрейфовая погрешность, присущая измерениям ускорения и угловой скорости прибором 390 инерциальной навигационной системы, все больше и больше возрастает. В соответствии с этим навигацию предпочтительно корректировать с помощью периодических GPS-отсчетов. Даже при погрешности, составляющей часть морской мили (миля=1853,25 м) в час для положения и нескольких десятых частей градуса в час для ориентации, погрешность определения прибором 390 инерциальной навигационной системы может быть значительной, если управляемый аппарат 340 остается ниже поверхности в течение продолжительного периода времени. В приводимом ниже рассмотрении описывается контур обратной связи, который можно использовать для коррекции вычисления, выполняемого устройством 390 инерциальной навигационной системы.
4. КОНТУР УПРАВЛЕНИЯ
[099] На фиг. 9 показан пример навигационного контура 400 обратной связи, предназначенного для определения положения управляемого аппарата (например, 340; фиг. 8), такого как дистанционно управляемый буксируемый аппарат, и коррекции этого положения. В соответствии с контуром 400 сначала в управляемом аппарате 340 получают (блок 402) непосредственный GPS-отсчет при использовании GPS-приемника 380. Это делают в то время, когда участок над управляемым аппаратом 340 свободен от обломков ледяных полей и других препятствий. После того как управляемый аппарат 340 снова погрузится, прибор 390 инерциальной навигационной системы и управляющая система 310 начинают определять (блок 404) положение управляемого аппарата 340 при буксировке. Это делается при использовании методов счисления пути с учетом исходного местоположения или привязки на основании GPS-отсчета и измерения направления, скорости и времени для вычисления положения управляемого аппарата 340, идущего вперед от исходного места.
[100] К сожалению, инерциальная навигация этого вида не является точной, и дрейфовая погрешность накапливается с течением времени. При условии, что дрейфовая погрешность является достаточно низкой, эту инерциальную навигацию можно продолжать. В некоторый момент времени управляющая система 310 определяет (блок 406), не превышает ли дрейфовая погрешность некоторый допустимый предел, который зависит от реализации. Если не превышает, управляющая система 310 может продолжать счисление (блок 404) пути до тех пор, пока дрейфовая поверхность не станет очень большой.
[101] После того как дрейфовая погрешность становится большой (вследствие продолжительного периода счисления пути, большой скорости разведки, большой протяженности разведки или сочетания их), управляющая система 310 делает попытку скорректировать погрешность при повторном всплытии на поверхность управляемого прибора 340 путем получения нового GPS-отсчета, которым определяется положение устройства 340, или путем интегрирования счисления пути прибором инерциальной навигационной системы при использовании обратной связи с основной навигационной системой судна. В соответствии с этим управляющая система 310 определяет на основании данных, вводимых вручную, или данных с датчиков (гидролокатора, ледового профилометра, глубиномера и т.д.) на управляемом аппарате 340, может ли (решение 408) устройство 340 подняться на поверхность, чтобы получить (блок 402) другой GPS-отсчет для определения местоположения устройства, чтобы повторить процесс.
[102] Если управляемый аппарат 340 не может всплыть на поверхность, то управляющая система 310 получает (блок 410) GPS-отсчет при использовании бортового GPS-приемника 380 на судне. Этим GPS-отсчетом дается местоположение буксирующего судна 30. В качестве дополнения система 310 получает (блок 412) данные с различных, находящихся на плаву устройств (например, с управляемого аппарата 340, буксируемой косы, датчиков и т.д.). Эти данные можно использовать для определения относительного положения управляемого аппарата 340.
[103] Например, на фиг. 10 показана морская сейсмическая система 20, имеющая буксируемую косу 60 с кабельными компасами или датчиками 70, расположенными на ней, для определения формы буксируемой косы. В данном случае для определения используют GPS-отсчет (x) от судовых компонентов 305, известные местоположения (Y1-Y5) датчиков, известное местоположение (Y6) управляемого аппарата вдоль буксируемой косы 60 и различные компасные курсы от кабельных компасов 70 или чего-либо подобного. Как показано, данные с датчиков 70 и управляемого аппарата 340 на буксируемой косе 60 (включая каждое из их положений (Y) на буксируемой косе, компасные курсы, скорректированные в соответствии со склонением, и т.п.) можно использовать для оценивания положения точек на буксируемой косе 60 и получения формы буксируемой косы. В сочетании с судовым GPS-отсчетом (X) при использовании бортового GPS-приемника из числа судовых компонентов 305 все эти данные можно объединить с данными о местоположении с прибора инерциальной навигационной системы (390; на фиг. 8) для коррекции дрейфовой погрешности и получения информации об абсолютном положении относительно местоположения буксируемой косы 60 и ее датчиков 70 в координатах системы GPS или аналогичных.
[104] Кроме того, акустические способы определения местоположения можно применять наряду с GPS-отсчетом при использовании бортового GPS-приемника из числа судовых компонентов 305 для коррекции дрейфовой погрешности прибора инерциальной навигационной системы и получения дополнительной информации об абсолютном положении. Например, на фиг. 11 показаны различные компоновки акустических систем для осуществления акустической перекрестной связи в системе 20. Такую акустическую перекрестную связь можно использовать для определения положений буксируемых кос.
[105] Кроме того, короткую базовую линию можно получать при использовании преобразователя на судне 30 для облучения акустическим импульсом акустического датчика на управляемом аппарате 340 в направлении к хвостовой части буксируемой косы 60, чтобы определять положение аппарата. Кроме того, длинную базовую линию можно получать при использовании одного или нескольких других преобразователей на морском дне (минимум два преобразователя необходимы для системы с длинной базовой линией) для облучения акустическим импульсом датчика на управляемом аппарате 340, чтобы определять его положение. Наконец, даже контрольные отсчеты с датчиков управляемого аппарата 340 и перемещения, относительно которых направляются указания на управляемый аппарат 340 судовыми компонентами 305 (то есть, управляющим устройством 330), можно объединять с бортовым GPS-отсчетом (X), чтобы определять абсолютное положение управляемого аппарата 340. Можно использовать те или другие способы, имеющиеся в данной области техники.
[106] Независимо от того, каким образом положение прибора инерциальной навигационной системы сочетается с обратной связью с других навигационных компонентов, в судовых компонентах 305 корректируется определенное счислением пути (относительное) положение управляемого аппарата (см. блок 414 на фиг. 9), так что в системе может продолжаться использование прибора 390 инерциальной навигационной системы с меньшей дрейфовой погрешностью. Весь процесс счисления пути и коррекции дрейфовой погрешности может продолжаться пока управляемый аппарат 340 остается погруженным ниже поверхности. Со временем, если позволят условия, управляемый аппарат 340 будет направлен к поверхности для получения (блок 402 на фиг. 9) непосредственного GPS-отсчета, чтобы вновь осуществить привязку местоположения аппарата. Этот новый GPS-отсчет обеспечит новую начальную точку, которую затем можно использовать при счислении пути и коррекции пока управляемый аппарат 340 остается погруженным при дальнейшей разведке.
С. КОРРЕКЦИЯ ЗА СКЛОНЕНИЕ ПРИ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКЕ
[107] Как отмечалось ранее, информацию о положении буксируемых кос 60 при сейсмической разведке можно получать при использовании одного или нескольких компасов, акустических измерений или чего-либо подобного для определения положений отдельных буксируемых кос 60 и положений по отношению друг к другу. Хотя делается обращение к кабельным компасам, идеи настоящего раскрытия можно использовать для коррекции любого устройства измерения геомагнитного поля, например, для коррекции магнитного курсового устройства относительно истинного севера. Измерения положений можно выполнять при использовании инструментов или датчиков, установленных на самих буксируемых косах 60, а измерения можно использовать при стандартной морской разведке с замкнутым ходом или при разведке в воде со льдом и с незамкнутым ходом. В конечном итоге, при морской разведке любого вида можно получать пользу от способов коррекции, раскрытых в этой заявке.
[108] Как отмечалось ранее, измерение мгновенного склонения полезно для коррекции определяемых магнитным способом местоположений буксируемых кос 60, которые получают от кабельных компасов или чего-либо подобного. Эта коррекция особенно полезна в более высоких широтах, поскольку значительная магнитная вариация может возникать на высоких широтах вследствие атмосферных разрядов. Наконец, как рассматривалось ранее, лед в воде препятствует использованию хвостовых буев и ограничивает получение GPS-отсчетов на конце буксируемых кос 60, так что коррекции за склонения могут повышать точность.
[109] Как отмечалось выше, один способ получения необходимых GPS-отсчетов в хвостовой части буксируемой косы 60 включает в себя использование плавучих или привязных буев (например, 82 на фиг. 2А) или включает в себя перемещение управляемого устройства к поверхности для получения GPS-отсчетов, когда это возможно (фиг. 2D, 3А-3B, 4, 5 и 6А-6В). В таком случае счисление пути или инерциальную навигацию можно использовать для отслеживания положений буксируемых кос 60 между периодическими GPS-отсчетами, как это было описано при обращении к фиг. 7А-7В, 8 и 9. Часть этих вычислений может быть основана на показаниях деклинометра в управляемом устройстве в хвостовой части буксируемой косы 60, как это было описано ранее при обращении к фиг. 2В и 4.
[110] При использовании деклинометра можно корректировать отсчеты по кабельным компасам, используемым для определения местоположения буксируемых кос 60. При буксировке деклинометра позади судна 30, например в хвостовой части буксируемой косы или в управляемом устройстве на буксируемой косе 60, деклинометр находится на расстоянии от судна 30. При таком положении деклинометра могут исключаться проблемы, связанные с магнитным полем судна. Вместо того, чтобы буксировать деклинометр на конце буксируемой косы 60, деклинометр можно буксировать непосредственно позади судна 30, обычно на расстоянии, превышающем в 2,5 раза длину судна, для снижения влияния магнитного поля судна.
[111] В деклинометре предпочтительно использовать векторные магнитометры для измерения направленных составляющих магнитного поля земли относительно пространственной ориентации магнитометров. При буксировке деклинометра на буксируемой косе 60 или позади судна 30 магнитометр перемещается, так что может требоваться непрерывная коррекция пространственной ориентации магнитометра при использовании инерциальных измерений и т.п. Это особенно справедливо, когда магнитометр в деклинометре представляет собой бесплатформенный трехкомпонентный магнитометр, в отличие от скалярного магнитометра, который измеряет только полное поле.
[112] Однако в большей части ситуаций любой наведенный от судна 30 магнетизм в сравнении с быстрым перемещением такого буксируемого магнитометра может не иметь негативного побочного эффекта, так что буксировка деклинометра позади судна 30 является менее желательной. По этим причинам буксирующее судно 30 может иметь систему измерения склонения, установленную на нем. Однако при нахождении системы измерения склонения на судне 30 необходимо компенсировать эффекты магнитно-твердого и магнитно-мягкого железа, создаваемые судном 30. В рассмотрении, которое следует ниже, излагаются подробности калибровки и использования системы измерения склонения на судне 30 при выполнении морской сейсмической разведки. И в этом случае разведка может проводиться или может не проводиться в водах со льдом или препятствиями, в которых получение на непрерывной основе GPS-отсчетов на буксируемых косах 60 является трудным или невозможным.
[113] На фиг. 12А-12В схематично показана управляющая система 500 для судна 30, буксирующего буксируемые косы 60. Хотя на фиг. 12А показано судно 30, буксирующее от скега 50 одну буксируемую косу 60, но, как представлено на фиг. 12В, можно использовать большее количество буксируемых кос 60. Каждая буксируемая коса 60 имеет некоторое количество магнитных курсовых приборов или кабельных компасов 65, расположенных по длине ее, предназначенных для определения и регулирования положения буксируемой косы во время буксировки. При использовании системы 520 измерения склонения управляющая система 500 получает отсчеты склонения на судне 30 и корректирует пространственно и во времени отсчеты кабельных компасов 65 на основании отсчетов склонения. Кроме того, в управляющей системе 500 можно использовать компоненты системы управления приборами, такой как Orca®, которую можно получить от ION Geophysical, и можно использовать аналогичные компоненты, описанные ранее, предназначенные для регулирования положений буксируемых кос 60.
[114] Управляющая система 500 имеет управляющий блок 510, который регулирует и контролирует различные буксируемые косы 60 в группе, а также другие датчики. Должно быть понятно, хотя это и не показано подробно, в управляющем блоке 510 могут использоваться компоненты, известные в данной области техники, такие как процессоры, устройства хранения данных, запоминающее устройство, программное обеспечение, пользовательские интерфейсы и т.п.
[115] Например, для регулирования буксируемых кос 60 управляющий блок 510 сопряжен с буксируемыми аппаратами, управляемыми устройствами, стабилизаторами, лопатками и другими компонентами (непоказанными), предназначенными для управления буксируемыми косами 60 и направления их, как это раскрыто в этой заявке и используется в данной области техники. Для мониторинга положения и определения склонения управляющий блок 510 сопряжен с кабельными компасами 65 на буксируемых косах 60 и сопряжен с магнитометром 550, блоком 560 инерциальных измерений и курсовым устройством 570, функционирующим по сигналам системы GPS (курсовым GPS-устройством), системы 520 измерения склонения на судне 30. Курсовое GPS-устройство 570 получает GPS-отсчеты на буксирующем судне 30, а магнитометр 550 получает три направленные магнитные составляющие и может быть феррозондовым магнитометром, бесплатформенным магнитометром или аналогичным. Предпочтительно, чтобы курсовое GPS-устройство 570 имело два GPS-приемника (непоказанных) для получения GPS-отсчетов и вычисления геодезического пеленга в соответствии со способами, известными и используемыми в данной области техники.
[116] Блок 560 инерциальных измерений получает три направленные составляющие движения судна. Например, блок 560 может иметь датчик тангажа, датчик крена и датчик курса. Угол тангажа и крен можно измерять двухкомпонентными инклинометрами. Рыскание и курс можно измерять при использовании индукционного компаса, но другие приборы также можно использовать.
[117] Для облегчения рассмотрения различных используемых ориентаций обратимся к фиг. 12C-12D, на которых показаны геомагнитная система координат и система координат судна. На фиг. 12С схематично показаны элементы геомагнитного поля для точки в пространстве. Элементы включают в себя северную составляющую Xe, восточную составляющую Ye и вертикальную составляющую Ze. На основании этих составляющих можно получить горизонтальную составляющую Н напряженности, полную напряженность F, угол I наклона и угол D склонения (измеряемый по часовой стрелке от истинного севера к горизонтальной составляющей).
[118] На фиг. 12D схематично показана система координат судна с углами пространственного положения, измеряемыми относительно географического севера и горизонтальной плоскости. Как обычно принято, инерциальная система координат судна имеет x-составляющую Xs (положительно измеряемую в направлении от носовой части судна), y-составляющую Ys (положительно измеряемую в направлении от правого борта) и z-составляющую Zs (положительно измеряемую вниз по килю). Когда судно движется, оно может иметь другие углы пространственного положения в своей системе координат по отношению к географическим координатам. Курс измеряется вокруг вертикальной оси (Zs), тогда как крен измеряется вокруг продольной оси (Xs). Угол тангажа измеряется вокруг поперечной оси (Ys).
[119] Привязанный к движению судна магнитометр 550, который может быть трехкомпонентным бесплатформенным магнитометром, измеряет геомагнитное поле в зависимости от пространственной ориентации судна. Вследствие этого измерения магнитометра необходимо делать не повернутыми для надлежащей привязки к абсолютной системе координат (то есть, к истинному северу, широте, долготе и т.д.) путем использования способов, известных в данной области техники.
[120] На фиг. 13 показана общая блок-схема последовательности действий при сейсмической разведке 600 с использованием склонения, определяемого на судне 30 управляющей системой 500 из фиг. 12А-12В. Чтобы провести сейсмическую разведку, операторы прежде всего калибруют (блок 602) бортовую систему 520 измерения склонения на судне 30. Как описывается ниже, в процессе калибровки в управляющей системе 500 имеется возможность учитывать магнитные эффекты судна 30 при получении отсчетов магнитометров и т.п.
[121] После выполнения калибровки операторы начинают (блок 604) сейсмическую разведку. Как отмечалось ранее, разведка включает в себя буксировку буксировочным судном 30 одной или нескольких буксируемых кос 60 в группе позади судна 30 на протяжении представляющего интерес района. Сигналы источника отражаются от особенностей пласта, а акустические датчики на буксируемых косах 60 получают сейсмические сигналы для анализа. Для объединения всех данных и в конечном счете построения изображения представляющей интерес области сейсмические сигналы следует соотнести с информацией о местоположении датчиков на буксируемой косе 60 и временем приема сигналов в процессе разведки. Для этого можно использовать многие из известных способов, предназначенных для обеспечения морской сейсмической разведки.
[122] Как это обычно делается во время морской сейсмической разведки, управляющий блок 510 получает (блок 606) отчеты по компасам с кабельных компасов 65 буксируемых кос и получает (блок 608) GPS-отсчеты с одного или нескольких GPS-приемников. Например, различные кабельные компасы 65 на буксируемых косах 60 получают отсчеты по компасам в точках вдоль буксируемых кос 60, а GPS-приемник 570 на буксирующем судне 30 получает GPS-отсчеты местоположения судна. При наличии возможности GPS-приемники (непоказанные) на хвостовых буях или других управляемых устройствах, буксируемых на буксируемых косах 60, также могут получать GPS-отсчеты, хотя, как рассматривалось ранее, это может происходить периодически.
[123] Затем отсчеты с кабельных компасов 65 корректируют (блок 610) за влияние текущего склонения, и эти отсчеты могут приниматься во внимание при использовании способов калибровки и вычислений, описываемых более подробно ниже. Вкратце, исходные отсчеты по компасам с компасов 65 буксируемых кос обычно сохраняют без коррекции за влияние текущего склонения, определяемого на судне 30. Чтобы выполнить эту коррекцию, управляющий блок 510 определяет отличие первого геодезического курса, полученного при использовании данных системы GPS с курсового GPS-прибора 570, от второго геодезического курса, полученного при использовании данных трехкомпонентного магнитометра 550. На основании этого управляющий блок 510 вычисляет магнитное склонение. В дополнение к этому управляющий блок 510 применяет к магнитному склонению компенсацию за влияние движения блока 560 трехкомпонентных инерциальных измерений. Затем магнитное склонение может быть применено к исходным отсчетам по компасам с компасов 65, а результирующие данные могут быть сохранены в качестве скорректированных отсчетов по компасам в базе 542 данных системы.
[124] При использовании навигационного программного обеспечения и известности компоновки буксируемых кос 60, разнесения датчиков и отсчетов по компасам, результатов определения перекрестных связей и т.п. управляющий блок 510 может регулировать (блок 612) положение буксируемых кос 60, когда это желательно для разведки. Затем все релевантные данные о положениях буксируемых кос, отсчетах акустических датчиков с буксируемых кос 60, отсчетах по компасам, GPS-отсчетах, склонении и т.п. могут быть сохранены в базе 542 данных для последующей обработки и анализа, обычных для морской сейсмической разведки, чтобы можно было построить изображение представляющей интерес области.
[125] С учетом этого общего обзора сейсмической разведки, при которой склонение определяется системой 520 измерения склонения на судне 30, теперь рассмотрение будет обращено к особенностям калибровки системы 520 измерения склонения на судне, чтобы иметь возможность определять и использовать склонение для коррекции отсчетов по компасам на буксируемых косах 60.
1. СПОСОБЫ КАЛИБРОВКИ
[126] До определения точного магнитного склонения управляющим блоком 510 на буксирующем судне 30 должны быть выполнены различные этапы калибровки. При одной калибровке управляющий блок 510 калибрует эффекты магнитно-твердого и магнитно-мягкого железа при одновременном определении трехмерных эффектов магнитно-твердого и магнитно-мягкого железа стального буксирующего судна 30 по отсчетам различных данных, получаемых устройствами 550, 560 и 570 на судне 30.
[127] Чтобы сделать это, управляющий блок 510 калибрует наведенную намагниченность для компенсации за влияние наведенных магнитных сил, вызванных ориентацией судна в магнитном поле земли. При этой калибровке используется кривая отклонения ряда Фурье. В дополнение к этому управляющий блок 510 выполняет привязку интерполированного внутреннего поля, получаемого с удаленных базовых станций или от обсерваторий, для оценивания точного магнитного склонения на месте калибровки. В данном случае управляющий блок 510 использует данные с базовых станций, расположенных на некотором расстоянии от места калибровки. Каждый из этих этапов калибровки подробно описывается ниже.
А. ПРОЦЕССЫ КАЛИБРОВКИ
[128] Калибровка эффектов магнитно-твердого и магнитно-мягкого железа буксирующего судна 30 управляющим блоком 510 основана на известных характеристиках магнитного поля земли и ферромагнетизма стального судна 30. Как известно, геомагнитное поле земли имеет величину, наклонение относительно горизонтали и склонение относительно истинного севера. Эти составляющие поля могут быть разложены на геометрические составляющие Mx, My и Mz, которые могут быть получены магнитометром 550 системы. Эти составляющие соответствуют типичной системе координат или правилу отсчетов для магнитометров. Это правило отсчетов часто известно как север-восток-вертикаль, и в нем ось X указывает на север по горизонтали, ось Y указывает на восток по горизонтали и ось Z указывает вниз по вертикали.
[129] Полное магнитное поле (В) земли в конкретном месте представляет собой сумму трех физических составляющих: основного поля (Bm) в ядре земли, коркового поля (Вс) вблизи поверхности земной коры и наиболее изменчивого атмосферного поля (Bd). Эти три поля Bm, Bc и Bd учитывают в процессе калибровки деклинометра.
[130] Вектор магнитного поля (В) земли имеет составляющие, определяемые в геодезической системе координат. Как отмечалось ранее при обращении к фиг. 12С, геодезическая система координат имеет x-составляющую Xe (положительно измеряемую к северу), y-составляющую Ye (положительно измеряемую к востоку) и z-составляющую Ze (положительно измеряемую вниз к центру земли). Основное поле (Bm) представляет собой наибольшую составляющую полного магнитного поля (В), содержащую около 98%, и ее можно прогнозировать с помощью ряда моделей. Некоторые типичные модели включают в себя международный эталон геомагнитного поля (МЭГП), всемирную магнитную модель (ВММ), усовершенствованную магнитную модель (УММ) и глобальную геомагнитную модель (ГГМ) Британской геологической службы (БГС). Одну или несколько из этих моделей используют в процедуре калибровки, излагаемой ниже.
[131] Со своей стороны, корковое поле (Вс) может стать известным только при локальных магнитных исследованиях, которые в большинстве случаев не проводят. С этим можно справиться путем калибровки в по мере возможности глубокой воде, чтобы минимизировать Вс. Изменчивое атмосферное поле (Bd) можно оценивать по интерполированным данным, предоставляемым магнитными обсерваториями, закрепленными за исследуемым регионом. Такие обсерватории стратегически расположены по всему миру и их данные можно использовать для оценивания изменчивого атмосферного поля (Bd) в представляющем интерес регионе.
[132] Ферромагнетизм двух типов представляет интерес при калибровке системы 500. Сначала из железа конструируют буксирующее судно 30, находящееся в магнитном поле земли, с тем, чтобы на судне 30 регистрировать остаточный или постоянный магнетизм во время физического процесса конструирования. Этот ферромагнетизм представляет собой так называемый магнетизм магнитно-твердого железа и является постоянно связанным с судном 30, даже когда его ориентация изменяется. Таким образом, когда магнитометр 550 получает отсчеты, магнетизм магнитно-твердого железа, связанный с судном 30, постоянно добавляется к выходному сигналу по каждой оси магнитометра 550.
[133] Представляющий интерес ферромагнетизм второго типа является наведенным магнетизмом, создаваемым взаимодействием магнитного поля земли и железа судна 30. Этот наведенный магнетизм представляет собой так называемый магнетизм магнитно-мягкого железа, и он изменяется (флуктуирует), когда судно 30 изменяет ориентацию в магнитном поле земли. Вычисление эффектов магнитно-мягкого железа является более трудоемким, чем вычисление эффектов магнитно-твердого железа, и включает в себя определение угла (фи), на который горизонтальные отсчеты Mx/My магнитометров поворачивают по горизонтали. Вычисление также включает в себя определение отношения (R) большой оси к малой оси в отклоненных горизонтальных отсчетах Mx/My магнитометра. При совместном использовании угла (фи) и отношения (R) компенсируют наведенный магнетизм (магнитно-мягкого железа) в горизонтальной плоскости. Конкретные уравнения для идентификации угла, величины большой оси, матриц поворота и коэффициента масштабирования большой оси известны в данной области техники и ради краткости не будут повторно детально формулироваться в этой заявке.
[134] Ферромагнетизм обоих этих типов действует в горизонтальных плоскостях (Mx, My) и вертикальной плоскости (Mz). Поэтому для определения корректировочных параметров в процессе калибровки предпочтительно компенсировать магнетизм магнитно-твердого и магнитно-мягкого железа в горизонтальной и вертикальной плоскостях.
B. БЛОК-СХЕМА ПОСЛЕДОВАТЕЛЬНОСТИ ДЕЙСТВИЙ
[135] На блок-схеме последовательности действий из фиг. 14 показан процесс 630 калибровки, который может быть реализован как программное обеспечение или что-либо подобное в программируемом процессоре управляющего блока, раскрытого в этой заявке. В процессе 630 калибровки определяют азимут системы 520 измерения склонения относительно магнитного севера. Для этого в процессе 630 используют повернутые компенсированные составляющие наблюдаемого магнитного поля, получаемые с помощью отсчетов (Mx, My и Mz) магнитометра, когда судно 30 идет по калибровочному маршруту. Затем магнитный азимут из этого наблюдаемого магнитного поля сравнивают с азимутом, получаемым курсовым GPS-устройством/блоком инерциальных измерений, 570/560, относительно истинного севера, что дает склонение для коррекции различных отсчетов по компасам на буксируемых косах 60.
[136] Сначала операторы выполняют (блок 632) калибровочный проход судна 30 для калибровки системы 520 измерения отклонения. В данном случае судно идет по круговому маршруту, так что курс судна проходит по всем азимутам, при этом азимутом называется угол в горизонтальной плоскости, измеряемый по часовой стрелке от пеленга на север. Для судна 30 можно использовать два маршрута 620/625, показанных на фиг. 15А-15В. Когда судно 30 идет по маршруту 620/625, управляющая система 510 регистрирует (блок 634) калибровочные данные, включая курс по данным курсового GPS-устройства/блока инерциальных измерений, угол тангажа и крен с блока 560 инерциальных измерений; трехкомпонентные отсчеты Mx, My и Mz с магнитометра 550; GPS-отсчеты широты и долготы с GPS-приемника 570; и метки времени для всех предшествующих данных. Затем эти калибровочные данные сохраняются (блок 636) для обработки, подробно описываемой ниже, чтобы получать параметры для коррекции будущих отсчетов.
[137] Для калибровки управляющий блок 510 поворачивает (блок 638) исходные данные магнитометра по горизонтали при использовании полученных данных системы GPS/блока инерциальных измерений. После того, как это сделано, различные вычисления выполняются для нахождения калибровочных параметров, которые можно использовать для коррекции отсчетов по компасам и сейсмических данных на основании изменений склонения, проявляющихся в процессе сейсмической разведки. В качестве части этих вычислений управляющий блок 510 определяет калибровочные параметры для эффекта магнитно-твердого и магнитно-мягкого железа при вертикальной ориентации (блок 640) и при горизонтальной ориентации (блок 642).
[138] Что касается вычисляемых калибровочных параметров, то управляющий блок 510 также выполняет вычисления, которые могут компенсировать (блок 644) атмосферные различия в магнитном поле земли. Как поясняется более подробно далее, это можно делать при использовании привязки к месту данных от окружающих обсерваторий. Наконец, по завершении калибровки управляющий блок 510 может использовать (блок 646) калибровочные параметры при регистрации и обработке данных компасов буксируемых кос с учетом изменений склонения, при выполнении или анализе результатов сейсмической разведки.
С. ПЕРВАЯ СТАДИЯ КАЛИБРОВКИ
[139] С учетом понимания общего процесса 630 калибровки, описанного выше, теперь рассмотрение будет обращено к фиг. 16А, на которой первая стадия 650 калибровки показана более подробно. (Этапы стадии 650 могут быть реализованы в виде программного обеспечения или чего-либо подобного в программируемом процессоре управляющего блока, раскрытого в этой заявке.) Как отмечалось ранее, после прохождения судном 30 по маршруту (620/625 на фиг. 15А-15В) и получения отсчетов по всем азимутам управляющий блок 510 сначала поворачивает (блок 652) исходные данные (Mx, My, Mz) магнитометра с магнитометра 550 по горизонтали при использовании угла тангажа и крена, полученных с блока 560 инерциальных измерений. Чтобы сделать это, поворот применяется к данным магнитометра для удаления крена (то есть, угла крена между осью X и горизонталью), а другой поворот применяется для удаления тангажа (то есть, угла тангажа между осью X и горизонталью). При этом повороте локальная горизонтальная плоскость x-y выравнивается относительно эталонной горизонтальной плоскости X-Y и можно использовать матрицы поворота и выкладки, известные в данной области техники.
[140] После этого управляющий блок 510 определяет (блок 654) повернутую вертикальную составляющую Mz как функцию азимута по данным системы GPS/блока инерциальных измерений при использовании кривой отклонения четвертого порядка для ряда Фурье и метода наименьших квадратов. Подбором этой кривой находятся вертикальные параметры магнитно-мягкого железа (9 коэффициентов) для компенсации эффектов магнитно-мягкого железа в вертикальной плоскости.
[141] На фиг. 17 графически показан этап определения повернутой вертикальной составляющей Mz как функции азимута на основании GPS-отсчетов/отсчетов блока инерциальных измерений при использовании кривой отклонения четвертого порядка для ряда Фурье и метода наименьших квадратов. В данном случае исходная вертикальная составляющая Mz показана как линия 680, а повернутая вертикальная составляющая Mz показана как линия 682. Найденная кривая для повернутой вертикальной составляющей Mz показана как линия 684, при этом повернутая вертикальная составляющая Mz (в наноТеслах) изображена на графике как функция азимута по данным блока инерциальных измерений с блока 560 инерциальных измерений. В результате выполнения этих этапов процесса 630 калибровки получают параметры для компенсации наведенного магнетизма (эффектов магнитно-мягкого железа) по вертикали, обусловленного судном 30. Вертикальные параметры магнитно-мягкого железа получают по девяти коэффициентам ряда Фурье для линии 684 наилучшего соответствия.
[142] Теперь обратимся к фиг. 16А, где управляющий блок 510 осуществляет (блоки с 656 по 665) итерацию в течение нескольких этапов после нахождения вертикальных параметров магнитно-мягкого железа, чтобы затем определить параметры для компенсации остаточного магнетизма (эффектов магнитно-твердого железа) по вертикали.
[143] Наряду с итерацией в пределах последовательности вертикальных поправочных коэффициентов Mz0adj и для каждой точки данных в калибровочной окружности, пересекаемой судном 30, во время процесса находится (блок 656) решение для Mz0=Фурье (функция азимута) минус поправочный коэффициент Mz0adj и осуществляется деление Mz0 на cos(угол тангажа)∗cos(крена). (При вычислениях Mz0adj представляет собой значение остаточной намагниченности по вертикали, при котором минимизируется стандартное отклонение (СО) горизонтального эллипса (Mh) в наноТеслах. При этой операции по существу не поворачивают вертикальную составляющую Mz0 азимута относительно ориентации судна. В дополнение к этому абсолютное значение не повернутой вертикальной составляющей Mz азимута уменьшается благодаря не повернутому азимуту Mz0. При уменьшении Mz изменяются повернутые составляющие Mx и My. Поэтому управляющий блок 510 поворачивает (блок 658) данные магнитометра (исходную составляющую Mx, исходную составляющую My, измененную в сторону уменьшения составляющую Mz) по горизонтали при использовании угла тангажа и крена, получаемых с блока 560 инерциальных измерений.
[144] Горизонтальные составляющие Mx и My магнитометра образуют горизонтальные составляющие поля. При построении графика Mx в горизонтальной плоскости как функции My горизонтальная составляющая наблюдаемого магнитного поля характеризуется эллипсом. При калибровке горизонтальная составляющая должна быть круговой, если она не искажается эффектами магнитно-мягкого и магнитно-твердого железа от судна 30. Однако, поскольку данные магнитометра искажены, горизонтальная составляющая наблюдаемого магнитного поля изменяется и смещается, поворачивается, а эллиптическая форма наблюдается при построении в горизонтальной плоскости графика Mx и My. При понимании того, каким образом эллипс Mh горизонтального поля искажается относительно идеальной круговой формы, различные параметры, описывающие эффекты магнитно-мягкого и магнитно-твердого железа от судна 30, можно определять по отсчетам магнитометра в горизонтальной плоскости.
[145] После поворота (блок 658) данных магнитометра управляющий блок 510 методом наименьших квадратов одновременно определяет (блок 660) параметры эллипса Mh горизонтального поля. Выполнение этого включает в себя нахождение двух перемещений (X0 и Y0) угла (фи) ориентации и отношения (R) большой и малой осей эллипса Mh, в соответствии с которыми искажается идеальная форма в случае получения магнитометрических отсчетов от реального магнитометра.
[146] Перемещение X0 представляет собой перемещение в направлении X горизонтального поля, а перемещение Y0 представляет собой перемещение в направлении Y горизонтального поля. Этими двумя перемещениями (X0 и Y0) компенсируют остаточный магнетизм (магнитно-твердого железа) по горизонтали. По существу, этими перемещениями (X0 и Y0) показывается, какие сдвиги приложены к эллипсу Mh горизонтального поля после коррекции за влияние тангажа и крена для компенсации сдвигающих в горизонтальной плоскости эффектов магнитно-твердого железа. Угол (фи) является угловой ориентацией эллипса Mh горизонтального поля по горизонтали, а отношение (R) представляет собой отношение большой и малой осей эллипса Mh горизонтального поля. При совместном использовании угла (фи) и отношения (R) осуществляется компенсация наведенного магнетизма (магнитно-мягкого железа) в горизонтальной плоскости.
[147] Затем во время процесса осуществляют перемещение и округление эллипса Mh горизонтального поля, то есть, находят (блок 642), при каких параметрах эллипс Mh горизонтального поля делается конформным идеальной круговой форме, если данные магнитометра не искажены эффектами магнитно-мягкого и магнитно-твердого железа. В данном случае в процессе калибровки итеративно находятся параметры, которыми определяется искажение вследствие влияния магнитно-твердого и магнитно-мягкого железа на данные магнитометра, путем выбора значения поправочного коэффициента Mz0adj, при котором минимизируется стандартное отклонение (СО) горизонтального поля (Mh) от идеального.
[148] В частности, во время процесса определяют перемещения (X0 и Y0), в соответствии с которыми эллипс Mh горизонтального поля сдвигается к (0, 0) в горизонтальной плоскости Mx/My. Во время процесса также определяют угол (фи), на который поворачивается эллипс Mh горизонтального поля, так что во время процесса может быть найдено отношение (R) большой и малой осей, необходимое для того, чтобы делать эллипс круговым путем увеличения малой оси. Затем после определения отношения в ходе процесса эллипс Mh горизонтального поля может быть повернут обратно на определенный угол (то есть, фи) для восстановления ориентации.
[149] В этой точке итеративного процесса из фиг. 16А управляющий блок 510 вычисляет (блок 664) стандартное отклонение для всех точек данных на основании параметров, которые использовались при текущей итерации решения. В частности, для всех точек данных управляющее устройство 510 вычисляет стандартное отклонение (СО) эллипса Mh горизонтального поля как корень квадратный из (Mx2+My2). Затем управляющий блок 510 выбирает (блок 665) поправочный коэффициент Mz0adj, при котором минимизируется стандартное отклонение (СО) эллипса Mh горизонтального поля от идеальной круговой формы. Это значение поправочного коэффициента Mz0adj связано с конкретными параметрами из числа перемещений (X0, Y0), угла (фи) поворота и отношения (R) осей. Кроме того, имеются девять коэффициентов ряда Фурье для вертикальной составляющей Mz. Затем при необходимости процесс повторяется до вычисления (блок 666) оптимизированного значения склонения на месте нахождения.
[150] На фиг. 18 графически показаны эти этапы. Исходные горизонтальные отсчеты Mx, My магнитометра показаны эллипсом 690 горизонтального поля, а данные о тангаже и крене с блока 560 инерциальных измерений показаны окружностью 692. Если искажение отсутствует, горизонтальные отсчеты Mx, My магнитометра при повороте на 360° представляются окружностью в горизонтальной плоскости Mx/My, центрированной относительно (0, 0). Конечно, под влиянием внешнего магнитного поле, в результате эффектов магнитно-твердого и магнитно-мягкого железа отсчеты Mx, My магнитометра 550 будут искажаться и отличаться от идеальных. В общем случае эффекты магнитно-твердого железа вызывают сдвиг отсчетов Mx, My от центра (0, 0). Поэтому исходные отсчеты Mx, My магнитометра показаны как эллипс 690, сдвинутый от центра. Со своей стороны, эффекты магнитно-мягкого железа приводят к деформации идеальной окружности отсчетов Mx, My до более эллиптической формы. Поэтому исходные отсчеты Mx, My магнитометра показаны эллипсом 690. Конечно, оба эффекта могут существовать одновременно, что приведет к искажениям обоих результирующих отсчетов Mx, My в эллипсе.
[151] При калибровочных вычислениях исходные данные (690) магнитометра поворачивают по горизонтали, используя данные (692) о тангаже и крене с блока 560 инерциальных измерений. Чтобы сделать это, на этапах используют перемещения для сдвига эллипса (690) исходных данных магнитометра к (0, 0) в горизонтальной плоскости Mx/My и для поворота эллипса (690) на угол (фи). Кроме того, на этих этапах увеличивают малую ось b эллипса (690) в соответствии с конкретным отношением (R) (тем самым скругляя эллипс) и поворачивают эллипс (690) обратно на угол (фи). Наконец, на этапах методом наименьших квадратов определяют, что представлено окружностью (696). Стандартное отклонение (СО), описанное ранее, в данном случае представлено разностью между окружностями (694 и 696).
D. ВТОРАЯ СТАДИЯ ПРОЦЕССА КАЛИБРОВКИ
[152] Первая стадия 650 калибровки из фиг. 16А является достаточной для определения азимута относительно магнитного севера. Однако на первой стадии 650 не осуществляют компенсацию атмосферной магнитной вариации Bd земли. Для осуществления ее выполняют вторую стадию калибровки, показанную на фиг. 16В, на которой интерполируют данные магнитной обсерватории, используя привязку внутреннего поля к оценке склонения во время калибровки. Этапы стадии 650 можно реализовать как программное обеспечение или что-либо подобное в программируемом процессоре управляющего блока, раскрытого в этой заявке.
[153] В данном случае управляющий блок 510 получает (блок 670) данные трехкомпонентного магнитометра на день калибровки от одной или нескольких региональных магнитных обсерваторий. В таком случае при использовании магнитной модели (например, усовершенствованной магнитной модели (УММ) или аналогичной) спрогнозированные склонения от обсерваторий (670) становятся известными. Для данного места калибровки или района разведки при этом процессе могут быть доступны несколько обсерваторий (670), связанных с местом калибровки.
[154] Управляющий блок 510 вычитает (блок 672) вычисленное склонение (668) из интерполированных обсерваторских склонений (670). На фиг. 16С схематично показано судно 30 в районе разведки относительно обсерваторских станций 670. Например, в каждой из обсерваторий (670) может быть получена временная последовательность дельта-склонений, где дельта-склонение представляет собой наблюдаемое в обсерватории (670) склонение за вычетом спрогнозированного склонения на сегодняшний день. Путем весовой обработки, основанной на расстоянии от места калибровки (то есть, от судна 30) до обсерваторий (670) и основанной на относительных напряженностях их горизонтальных магнитных полей во время процесса калибровки интерполируется (блок 674) временная последовательность дельта-склонений для места калибровки.
[155] На фиг. 19 графически показаны эти этапы. Кривые дельта-склонения для четырех обсерваторий представлены линиями 6951-4. При выполнении взвешивания, основанного на расстоянии от места калибровки (судна 30) до обсерваторий (670) и основанного на относительных напряженностях их горизонтальных магнитных полей, во время процесса интерполируется временная последовательность дельта-склонений для места калибровки, которая представлена линией 697.
[156] Затем на второй стадии калибровки из фиг. 16В это интерполированное дельта-склонение (668) добавляется к спрогнозированному склонению из модели для получения временной последовательности склонений на месте калибровки. Склонения как функции времени и магнитного азимута судна 30, вычисленные выше, затем вычитаются (блок 672) из обсерваторской временной последовательности для получения поправки за влияние склонения как функции азимута. Эта поправка определяется (блок 674) как функция магнитного азимута с кривой отклонения четвертого порядка для ряда Фурье (также называемой кривой отклонения) при использовании метода наименьших квадратов. Результат заключается в получении девяти коэффициентов ряда Фурье для поправки за влияние склонения, которой компенсируется атмосферная вариация склонения во время и на месте калибровки.
[157] Наконец, после калибровочного вычисления управляющий блок 510 пересылает (блок 676) различные параметры склонения для использования при обработке данных, собираемых в процессе разведки. Параметры включают в себя:
- параметры магнитно-мягкого железа, то есть, 9 коэффициентов ряда Фурье для вертикальной составляющей Mz, которыми компенсируется наведенный магнетизм (магнитно-мягкого железа) по вертикали;
- параметры магнитно-твердого железа, то есть, поправочный коэффициент Mz0adj, который в сочетании с рядом Фурье для вертикальной составляющей Mz (указанной выше) образует составляющую Mz0 для компенсации остаточного магнетизма (магнитно-твердого железа) по вертикали;
- матрицу перемещений X0 для перемещения в направлении X горизонтального поля;
- матрицу перемещений Y0 для перемещения в направлении Y горизонтального поля, которым совместно с X0 компенсируется остаточный магнетизм (магнитно-твердого железа) по горизонтали;
- угол (фи) ориентации, который эллипс Mh горизонтального поля данных магнитометра имеет по горизонтали;
- отношение (R) большой и малой осей, которое имеет эллипс Mh горизонтального поля, и оно совместно с углом (фи) компенсирует наведенный магнетизм (магнитно-мягкого железа) по горизонтали; и
- девять коэффициентов ряда Фурье для поправки за влияние склонения (также называемой кривой отклонения), которой компенсируется атмосферная вариация склонения во время и на месте калибровки.
2. ПОСЛЕДОВАТЕЛЬНОСТЬ ДЕЙСТВИЙ ПРИ ОБРАБОТКЕ
[158] При наличии калибровочных параметров управляющий блок 510 затем может обработать данные о склонении на судне 30, чтобы скорректировать отсчеты по компасам за текущее склонение. На фиг. 20 показана блок-схема последовательности действий при этой обработке, в которой используются многие этапы из изложенных ранее. Как и прежде, обработка может быть реализована как программное обеспечение или что-либо подобное в программируемом процессоре управляющего блока, раскрытого в этой заявке. В данном случае при обработке ранее полученные параметры склонения, определенные в процессе калибровки, используются для нахождения точного магнитного склонения для кабельных компасов и датчиков и для представления навигационным компонентам управляющей системы.
[159] Сначала управляющий блок 510 вычисляет (блок 702) MzF по исходному азимуту Mz, Mz0adj, углу тангажа, крену и девяти коэффициентам Фурье для вертикальных параметров магнитно-мягкого железа и поворачивает (блок 704) Mx, My, MzF по горизонтали с учетом тангажа и крена. Блок 510 перемещает (блок 706) горизонтальные составляющие Mx/My (то есть, эллипс Mh горизонтального поля) к (0, 0) с учетом преобразований X0 и Y0 и округляет (блок 708) эллипс Mh горизонтального поля с учетом ранее определенных угла (фи) и отношения (R). Затем управляющий блок 510 вычисляет (блок 710) магнитный азимут по Mx и My и вычисляет (блок 712) склонение по магнитному азимуту и курсу, определенному с помощью системы GPS/блока инерциальных измерений.
[160] Чтобы закончить вторую часть процесса и учесть магнитные атмосферные изменения Bd, управляющий блок 510 вычисляет (блок 714) дельта-склонение по магнитному азимуту и девяти коэффициентам Фурье для коррекции за влияние атмосферных изменений. Наконец, управляющий блок 510 корректирует (блок 716) магнитное склонение с учетом дельта-склонения и представляет результаты в навигационную систему для управления буксируемыми косами 60 и для регистрации, позволяющей осуществлять последующую обработку скорректированных отсчетов по кабельным компасам, подробно описанную в этой заявке.
D. КОРРЕКЦИЯ ЗА СКЛОНЕНИЕ ПРИ НАЗЕМНОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКЕ
[161] Как раскрыто в этой заявке, систему склонения можно использовать при морской сейсмической разведке и особенно при разведке, когда непрактично прикреплять хвостовые буи к концам кабелей буксируемых кос, например, на участках, покрытых льдом, в районах интенсивного судоходства и при применениях, когда кабель буксируется слишком глубоко погруженным, чтобы на практике к нему можно бы было присоединять хвостовой буй (в случае геометрии глубинного буксирования, косой геометрии кабеля и т.д.). Однако систему склонения можно использовать в других ситуациях. В общем случае раскрытую систему можно использовать при морской сейсмической разведке, когда от компасов или других магнитных датчиков курса требуется дополнительная точность, даже если может отсутствовать препятствие для снабжения хвостовым буем, чтобы получать GPS-отсчеты при замкнутом ходе. Кроме того, раскрытую систему можно использовать при морской сейсмической разведке, когда при разведке пересекается широкое пространство и при этом ожидается изменение магнитного склонения или окружающие условия свидетельствуют о флуктуациях склонения.
[162] Вместо морских применений систему склонения можно также использовать при многокомпонентной наземной разведке, когда основным датчиком ориентации является компас или другой магнитный курсовой датчик, и иногда можно использовать, когда магнитное поле земли находится в состоянии экстремального изменения по пространству или во времени (например, на арктических широтах или во время солнечных бурь). Поэтому раскрытую систему можно использовать при регистрации сейсмических данных для измерения в реальном времени магнитного склонения в конкретном районе. Кроме того, раскрытую систему можно использовать при наземной и морской сейсмических разведках применительно к любому магнитному курсовому устройству для коррекции за влияние истинного севера и можно использовать для компенсации магнитного влияния морского или наземного устройства, такого как стальная платформа, судно, аппарат или что-либо подобное. В одном примере не морское судно, а наземное транспортное средство может иметь магнитометр, навигационный прибор и контроллер, аналогичные раскрытым выше для морской разведки, хотя и используемые для наземной разведки.
[163] В качестве другого примера на фиг. 21 схематично показан вид в плане системы 800 наземной сейсмической разведки, имеющей источник 810, множество датчиков 820 и центральный контроллер 830. В качестве разнесенных датчиков 820, расположенных в матрице, предназначенных для получения геофизической информации, могут использоваться трехкомпонентные датчики для приема энергии в трех измерениях, известной как сейсмическая волна в трех измерениях, и они могут включать в себя акселерометры, геофоны скорости или что-либо подобное. При использовании сейсмический источник 810 передает акустическую энергию в грунт, а датчики 820 принимают энергию после отражения и преломления на границах подземных структур. Центральный контроллер 830 принимает сейсмическую информацию и обрабатывает ее, чтобы можно было получить информацию в виде изображений.
[164] Как показывалось, различные изогональные линии склонения геомагнитного поля могут проходить через район разведки. Эти изогональные линии обычно выражают в градусах при коррекции отсчетов по компасам за влияние истинного севера. Градусы изогональных линий изменяются на протяжении географического места и также изменяются во времени. Поэтому измерения геомагнитного поля от компасов или чего-либо подобного, связанные с каждым из датчиков 820, могут иметь погрешности вследствие флуктуаций склонения. По этой причине в системе 800 используются способы, раскрытые в этой заявке, предназначенные для получения склонения во времени и по пространству для различных местоположений датчиков с тем, чтобы соответствующие измерения геомагнитного поля можно было корректировать и откорректированные измерения могли обеспечивать в большей степени коррелированную информацию для построения изображения.
[165] Как также было показано, склонение на датчиках 820 можно определять в соответствии с интерполяцией с одной или нескольких удаленных базовых станции S1-S2, так что пространственные и временные коррекции за влияния склонений можно вычислять для различных местоположений датчиков при использовании привязки к месту, подробно описанной ранее. В дополнение к этому или как вариант склонение на датчиках 820 можно вычислять индивидуально при использовании системы склонения и способов, раскрытых в этой заявке, так что индивидуальные геомагнитные отсчеты на различных местах расположения датчиков можно корректировать за влияние склонения в реальном времени.
[166] Способы настоящего раскрытия могут быть реализованы в цифровых электронных схемах или в компьютерном аппаратном обеспечения, микропрограммных средствах, программном обеспечении или в сочетаниях из них. Установка для практического применения раскрытых способов может быть реализована в виде компьютерного программного продукта, реально содержащегося в считываемом компьютером устройстве памяти и предназначенного для выполнения программируемым процессором; а этапы раскрытых способов могут осуществляться программируемым процессором, выполняющим программу инструкций по осуществлению функций раскрытых способов путем выполнения операций над входными данными и формирования выходных данных. Подходящие процессоры включают в себя, например, микропроцессоры общего и специального назначения. Обычно процессор принимает команды и данные с постоянного запоминающего устройства и/или оперативного запоминающего устройства, в том числе с магнитных дисков, таких как внутренние жесткие диски и съемные диски; с магнитооптических дисков; и оптических дисков. Устройства памяти, реально пригодные для содержания компьютерных программных команд и данных, включают в себя все виды энергонезависимой памяти, включая, например, полупроводниковые запоминающие устройства, такие как программируемое постоянное запоминающее устройство, электрически стираемое программируемое постоянное запоминающее устройство и флэш-память; магнитные диски, такие как внутренние жесткие диски и съемные диски; магнитооптические диски; и компакт-диски, доступные только для чтения. Любое устройство из упомянутых выше может быть дополнено специализированной интегральной схемой (СИС) или включено в нее.
[167] Приведенное выше описание предпочтительных и других вариантов осуществления не предполагается задающим пределы или ограничивающим объем или область применения концепций изобретения, предложенных заявителем. Идеи настоящего раскрытия можно применять при двумерной, трехмерной и четырехмерной сейсмической разведке в воде со льдом или препятствиями, а также при обычных морских сейсмогеологических условиях. Хотя применение описано для моря, коррекцию магнитного склонения за истинный север, раскрытую в этой заявке, можно использовать при наземной и морской сейсмических разведках. Кроме того, аспекты и способы, рассмотренные в сочетании с одним конкретным вариантом осуществления, реализацией или компоновкой, раскрытыми в этой заявке, можно использовать или сочетать с аспектами и способами, рассмотренными в других вариантах осуществления, раскрытых в этой заявке. Взамен раскрытия концепций изобретения, содержащихся в этой заявке, заявитель желает иметь все патентные права, предоставляемые прилагаемой формулой изобретения. Поэтому предполагается, что прилагаемая формула изобретения включает в себя в полной мере все модификации и изменения, которые попадают в объем нижеследующей формулы изобретения или эквивалентов ее.
Реферат
Изобретение относится к области геофизики и может быть использовано для проведения морских сейсморазведочных работ. При сейсмической разведке в покрытой льдом воде буксируемые косы буксируют позади судна ниже поверхности воды, чтобы избежать столкновения со льдом. Отсчеты по сигналам глобальной системы местоопределения нельзя получать систематически, поскольку при наличии льда исключается следование на поверхности от буксируемой косы хвостового буя с приемником глобальной системы местоопределения. Вместо этого устройство буксируют на буксируемой косе ниже поверхности воды. Абсолютное положение буксируемой косы отслеживают при периодическом приведении буксируемого устройства к поверхности, чтобы можно было получать отсчеты по сигналам глобальной системы местоопределения. Абсолютное положение буксируемой косы затем можно использовать в сочетании с отсчетами по компасам и можно сопоставлять сигналы различных сейсмических датчиков, получаемые вдоль буксируемой косы в продолжение разведки. Отсчеты по компасам можно корректировать за влияние склонения при использовании отсчетов деклинометра, которые можно корректировать за влияние эффектов железа от судна или другого устройства, несущего деклинометр. Технический результат - повышение точности разведочных данных. 5 н. и 26 з.п. ф-лы, 33 ил.
Формула
калибруют деклинометр на судне в районе разведки;
получают один или несколько сейсмических сигналов одним или несколькими сейсмическими датчиками в районе разведки посредством буксирования одного или нескольких сейсмических датчиков во время сейсмической разведки с помощью судна;
получают одно или несколько измерений локального геомагнитного поля, относящихся к одному или нескольким сейсмическим датчикам во время сейсмической разведки;
измеряют временные и пространственные параметры склонения с использованием калибрированного деклинометра во время сейсмической разведки;
корректируют одно или несколько измерений локального геомагнитного поля на основании параметров склонения; и
сопоставляют одно или несколько скорректированных измерений геомагнитного поля с одним или несколькими сейсмическими сигналами.
получают один или несколько сейсмических сигналов одним или несколькими сейсмическими датчиками в районе разведки посредством буксирования одного или нескольких сейсмических датчиков во время сейсмической разведки с помощью судна;
получают одно или несколько измерений локального геомагнитного поля, относящихся к одному или нескольким сейсмическим датчикам во время сейсмической разведки;
измеряют временные и пространственные параметры склонения посредством измерения склонения на судне в продолжение времени во время сейсмической разведки и компенсируют влияние параметров мягкого и твердого железа судна для вертикальной и горизонтальной плоскостей в геомагнитном поле;
корректируют одно или несколько измерений локального геомагнитного поля на основании параметров склонения; и
сопоставляют одно или несколько скорректированных измерений геомагнитного поля с одним или несколькими сейсмическими сигналами.
прохождение судном маршрута в геомагнитном поле;
получение множества магнитометрических измерений при прохождении маршрута;
получение множества курсовых измерений при прохождении маршрута;
вычисление склонения в геомагнитном поле при использовании магнитометрических измерений и курсовых измерений;
компенсацию влияния эффектов магнитно-мягкого и магнитно-твердого железа судна путем одновременного определения параметров мягкого и твердого железа вычислением по методу наименьших квадратов; и
коррекцию вычисленного склонения на основании параметров магнитно-мягкого и магнитно-твердого железа.
одновременное определение параметров магнитно-мягкого и магнитно-твердого железа вычислением по методу наименьших квадратов.
по меньшей мере периодическое отслеживание абсолютного положения по меньшей мере одной буксируемой косы; и
сопоставление одного или нескольких скорректированных измерений геомагнитного поля с абсолютным положением.
получение информации об абсолютном положении по меньшей мере одной буксируемой косы устройством при приведении его к поверхности.
получение информации об относительном положении по меньшей мере одной буксируемой косы при буксировке ее ниже поверхности воды; и
определение абсолютного положения по меньшей мере одной буксируемой косы при использовании информации об относительном положении и периодически получаемой информации об абсолютном положении.
по меньшей мере один сейсмический датчик для измерения одного или нескольких сейсмических сигналов в районе разведки во время сейсмической разведки;
по меньшей мере одно геомагнитное курсовое устройство, связанное с по меньшей мере одним сейсмическим датчиком для выполнения одного или нескольких измерений локального геомагнитного поля во время сейсмической разведки;
деклинометр, расположенный на судне для выполнения измерений во время сейсмической разведки;
контроллер, функционально связанный с по меньшей мере одним сейсмическим датчиком, по меньшей мере одним геомагнитным курсовым устройством и деклинометром, при этом контроллер выполнен с возможностью:
калибровки деклинометра на судне в районе разведки;
определения временных и пространственных параметров склонения из измерений, выполненных с помощью калибрированного деклинометра;
коррекции одного или нескольких измерений локального геомагнитного поля на основании параметров склонения; и
сопоставления одного или нескольких скорректированных измерений геомагнитного поля с одним или несколькими сейсмическими сигналами.
по меньшей мере один сейсмический датчик для измерения одного или нескольких сейсмических сигналов в районе разведки во время сейсмической разведки;
по меньшей мере одно геомагнитное курсовое устройство, связанное с по меньшей мере одним сейсмическим датчиком для выполнения одного или нескольких измерений локального геомагнитного поля во время сейсмической разведки;
деклинометр, расположенный на судне для выполнения измерений в течение времени во время сейсмической разведки;
контроллер, функционально связанный с по меньшей мере одним сейсмическим датчиком, по меньшей мере одним геомагнитным курсовым устройством и деклинометром, при этом контроллер выполнен с возможностью:
определения временных и пространственных параметров склонения из измерений, выполненных с помощью деклинометра;
компенсирования влияния параметров мягкого и твердого железа судна для вертикальной и горизонтальной плоскостей в геомагнитном поле;
коррекции одного или нескольких измерений локального геомагнитного поля на основании параметров склонения и параметров мягкого и твердого железа судна; и
сопоставления одного или нескольких скорректированных измерений геомагнитного поля с одним или несколькими сейсмическими сигналами.
получения множества измерений магнитометра при прохождении маршрута в геомагнитном поле с судном;
получение множества курсовых измерений при прохождении маршрута;
вычисление склонения в геомагнитном поле при использовании магнитометрических измерений и курсовых измерений;
компенсацию влияния эффектов мягкого и твердого железа судна путем одновременного определения параметров мягкого и твердого железа вычислением по методу наименьших квадратов; и
коррекцию вычисленного склонения на основании параметров мягкого и твердого железа.
Комментарии