Блок ретранслятора радиогидроакустического буя - RU160239U1
Код документа: RU160239U1
Чертежи

Описание
Полезная модель относится к области гидроакустики, а именно к применяемым в морской авиации радиотехническим средствам передачи сигналов гидроакустической обстановки, и может быть использована в качестве радиоэлектронного ретрансляционного блока, размещаемого внутри герметичного корпуса всплывающего радиогидроакустического буя (радиобуя, РГБ) - автономной автоматической гидроакустической станции системы освещения подводной и надводной обстановки.
Из патента на ПМ №115929 известен «ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ В МЕЛКОВОДНЫХ АКВАТОРИЯХ», в котором использован радиогидрофизический буй, снабженный донным якорем и включающий в себя радиопередатчик, соединенный через блок АЦП с приемным гидрофоном, блок GPS-ГЛОНАСС позиционирования и аккумуляторный блок автономного питания.
Современные РГБ, в частности, военного назначения, представляют собой сложные электронные устройства, обеспечивающие гибкость поисковой работы в различных тактических ситуациях благодаря широкому спектру возможностей от электронного переключения частоты радиоканала, времени работы радиобуя и изменения глубины погружения гидрофонов до выбора схемы постановки барьеров или полей. В настоящее время усилия инженеров-разработчиков РГБ, направленные на совершенствование их технических характеристик, сосредоточены на решении следующих ключевых задач [1-5]:
- развитие средств управления РГБ на основе программируемых контроллеров и средств дистанционного управления по радиокомандам;
- развитие средств и методов цифровой передачи сигнала на носитель (авиационное средство);
- увеличение продолжительности работы РГБ за счет применения аккумуляторных батарей новых типов и использования возобновляемых источников энергии;
- повышение точности определения местоположения РГБ;
- совершенствование бортовых процессоров и аппаратуры обработки гидроакустического сигнала;
- совершенствование гидроакустического антенного оборудования;
- снижение массы и габаритных размеров РГБ.
В качестве наиболее близкого по функциональным и техническим характеристикам к предлагаемой полезной модели современного прототипа взят блок ретранслятора пассивного РГБ AN/SSQ-53F из состава системы DIFAR (Directional Frequency Analysis and Recording) ВМС США, являющегося функционально комбинацией радиобуя направленного действия AN/SSQ-53D системы DIFAR и радиобуя ненаправленного действия с калибровкой гидрофонов AN/SSQ-57 системы LOFAR (Low Frequency Analysis and Recording). Информация о прототипе представлена в [www.sonobuoytechsystems.com/pdfs/Q53F2-2-10.pdf].
Блок ретранслятора указанного радиогидроакустического буя включает в себя микроконтроллер (МК), модуль приема координатно-временных параметров (МКВП), приемо-передающее устройство (ППУ), модуль передачи данных (МПД), антенные модули (А2 и А1) и модуль электропитания (МЭП) с аккумуляторной батареей (АБ).
Встроенный программируемый микроконтроллер (МК) управляет работой блока ретранслятора РГБ. Гидроакустический сигнал, принятый и усиленный аппаратурой подводного герметичного модуля, по двухпроводной линии поступает в модуль передачи данных (МПД), а затем в частотный модулятор приемо-передающего устройства (ППУ), содержащего также тракт радиочастоты и управляемый синтезатор сетки частот несущих, где модулируется одна из 96 предварительно или после приводнения выбранных оператором несущих в диапазоне 136.000-173.500 МГц, после чего модулированный гидроакустической информацией сигнал излучается в эфир ультракоротковолновой антенной (А2), встроенная система позиционирования использует координатно-временные данные, получаемые от глобальной навигационной системы GPS с помощью приемной антенны диапазона 1.575 ГГц (А1) и модуля приема координатно-временных параметров (МКВП). Блок ретранслятора поддерживает командный интерфейс с оператором по радиоканалу, детектируя в ППУ принимаемые антенной А2 радиосигналы команд и передавая их на исполнение в МК, обеспечивает мощность излучения радиопередатчика не менее 1 Вт и максимальное время функционирования не более 8 часов.
Рассмотренный прототип имеет следующие недостатки:
- достаточно короткое «время жизни» РГБ AN/SSQ-53F накладывает существенные ограничения на продолжительность поисковой работы и площадь контролируемой акватории;
- система позиционирования, а именно модуль МКВП, использует только сигнал системы GPS;
- в связи с тем, что протяженность зоны уверенного приема для диапазона УКВ, используемого ретранслятором радиобуя, определяется выполнением условия прямой видимости для излучателя и приемника в силу особенностей распространения этих радиоволн, контакт с носителем может осуществляться только облетным методом, который обеспечивает непосредственное выполнение данного условия для носителя и каждого конкретного радиобуя.
От указанных недостатков свободна предлагаемая полезная модель, задачей которой является разработка радиоэлектронного блока радиобуя, имеющего расширенные технические возможности и низкое энергопотребление.
Техническим результатом от использования предлагаемой полезной модели является: повышение надежности и точности в определении местонахождения объектов и увеличение жизненного цикла РГБ.
Задача решается, а технический результат достигается тем, что блок ретранслятора радиогидроакустического буя, включающий модуль приема координатно-временных параметров, модуль передачи данных по двухпроводной линии электропитания постоянного тока, антенный модуль, и модуль электропитания с аккумуляторной батареей, дополнительно включает микропроцессорный радиомодуль, содержащий связанные между собой электрическими связями программируемый микроконтроллер и радиомодем. Микропроцессорный радиомодуль связан по двухпроводной линии электропитания постоянного тока с подводным герметичным модулем автоматической радиогидроакустической станции, антенный модуль выполнен в виде единого комбинированного мультидиапазонного антенно-фидерного устройства, обеспечивающего работу приемо-передатчика на ультракоротких волнах и прием сигналов глобальных навигационных систем ГЛОНАСС и GPS, при этом антенный модуль подключен ко входу модуля приема координатно-временных параметров и к выходу микропроцессорного радиомодуля, к которому, в свою очередь, подключен блок электропитания, выполненный в виде модуля гибридного электропитания с возможностью подключения возобновляемых источников энергии.
Микропроцессорный радиомодуль осуществляет обмен данными по радиоканалу с другими абонентами (носителем и радиобуями), организует обмен данными по двухпроводной линии электропитания постоянного тока с входящим в состав автоматической радиогидроакустической станции подводным герметичным модулем, осуществляет прием координатно-временных навигационных данных за счет подключенного к нему модуля приема координатно-временных параметров, а также обеспечивает управление системой электропитания для поддержки режима максимального энергосбережения для аккумуляторной батареи за счет того, что упомянутый микропроцессорный радиомодуль связан с модулем электропитания РГБ.
Принципиальным отличием от прототипа является применение микропроцессорного радиомодуля, поддерживающего технологию беспроводной самоорганизующейся сети для организации передачи данных по радиоканалу, и антенного модуля, который выполнен в виде единого комбинированного мультидиапазонного антенно-фидерного устройства обеспечивающего и работу связевого радиоканала, и прием данных одновременно от двух глобальных спутниковых навигационных систем ГЛОНАСС и GPS, а также использование в системе электропитания, помимо аккумуляторной батареи, модуля гибридного электропитания, рассчитанного на подключение преобразователей солнечной энергии и энергии других возобновляемых источников, что обеспечивает достижение технического результата повышение надежности и точности в определении местонахождения объектов и увеличение жизненного цикла РГБ.
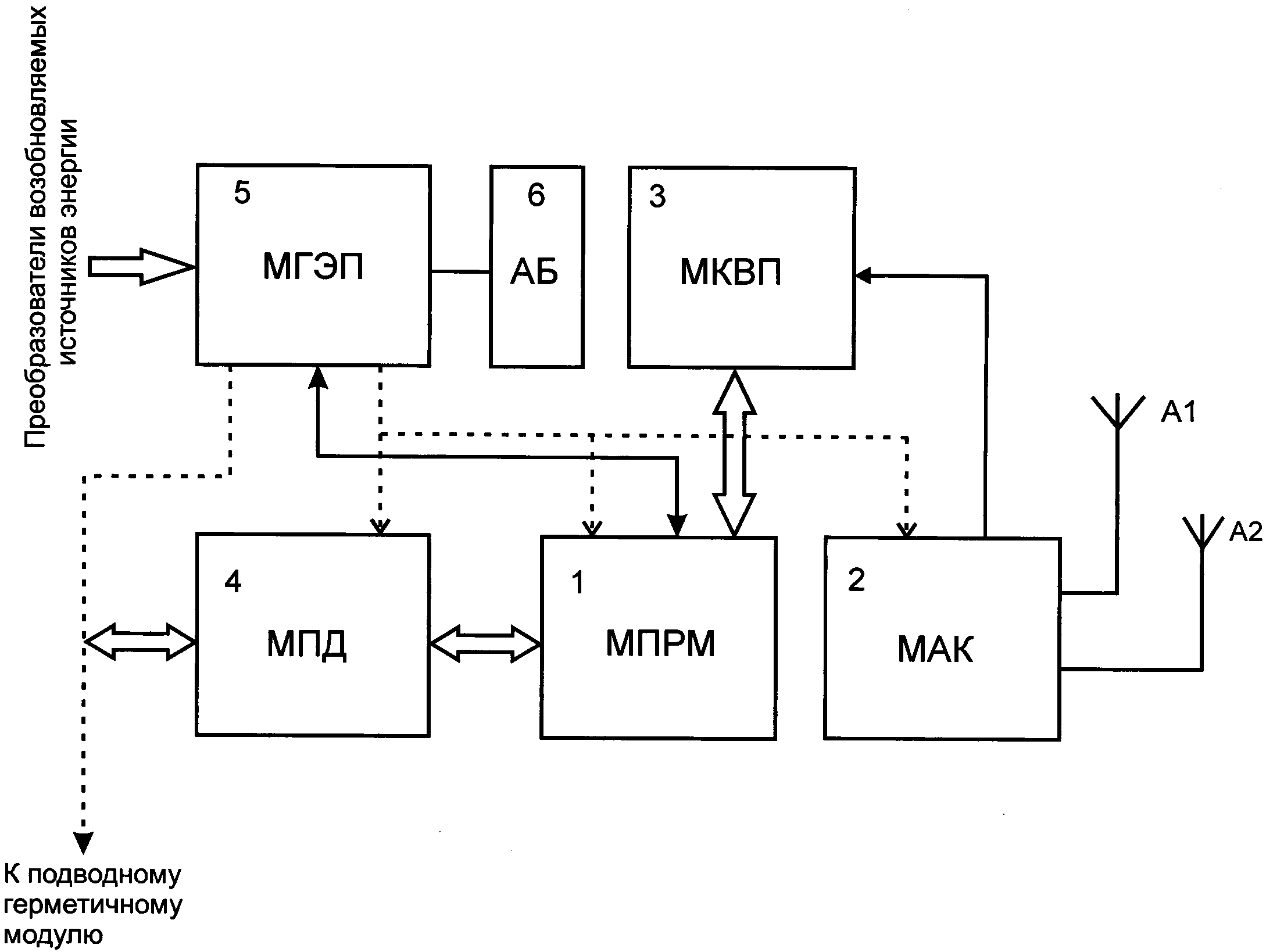
Сущность заявляемой полезной модели поясняется представленной на рисунке 1 ее обобщенной структурной схемой, где:
1 - микропроцессорный радиомодуль (МПРМ), который связан используемой как канал передачи данных линией электропитания с подводным герметичным модулем автоматической радиогидроакустической станции (на схеме не показан);
2 - антенный модуль, выполненный в виде единого комбинированного мультидиапазонного антенно-фидерного устройства (МАК),
3 - модуль приема координатно-временных параметров (МКВП),
4 - модуль передачи данных по двухпроводной линии электропитания постоянного тока (МПД),
5 - модуль гибридного электропитания (МГЭП);
6 - аккумуляторная батарея (АБ).
Устройство работает следующим образом. Радиомодем, интегрированный в МПРМ (1), через антенную компоненту А1 мультидиапазонного комбинированного активного антенного модуля 2 осуществляет поддержку работы дуплексного канала радиосвязи с другими абонентами самоорганизующейся беспроводной сети (носителем и радиобуями) на основе проприетарного криптозащищенного сетевого протокола. Микроконтроллер, интегрированный в МПРМ (1), управляет потоками информации и буферизацией данных, передаваемых по радиоканалу, по каналу связи с модулем приема координатно-временных параметров 3, к которому подключена антенная компонента А2, обеспечивающая прием сигналов навигационных систем ГЛОНАСС (1.598-1.606 ГГц) и GPS (1.575 ГГц), и подводным герметичным модулем (На схеме не показан) через модуль модема передачи данных по двухпроводной линии электропитания постоянного тока 4. Также интегрированный в МПРМ (1) микроконтроллер управляет всей системой энергоснабжения РГБ через модуль гибридного электропитания 5, который обеспечивает переключение режимов работы системы электропитания в зависимости от выполняемых РГБ текущих задач с целью поддержки условий максимально возможного энергосбережения для аккумуляторной батареи 6, а также обеспечивает автоматический заряд аккумулятора от преобразователей возобновляемых источников энергии -солнечной батареи и др. источников.
Таким образом, с помощью предлагаемого блока ретранслятора РГБ достигается эффективное решение стоящих перед РГБ задач при оптимальном его построении в системе РГБ - носитель. Заявляемая полезная модель блока ретранслятора РГБ может быть использована в качестве основы для построения автономных автоматических многофункциональных радиогидроакустических станций с пролонгированным жизненным циклом для формирования функционирующей как самоорганизующаяся сеть мобильной оперативно-развертываемой мультипозиционной и произвольно наращиваемой в требуемой конфигурации сетецентрической гидроакустической системы освещения подводной и надводной обстановки.
Преимуществом разработанного объекта является значительное улучшение тактико-технических характеристик реализуемой на базе предлагаемой полезной модели системы освещения подводной и надводной обстановки.
ИСТОЧНИКИ ИНФОРМАЦИИ
1 А. Брюхов, А. Бородавкин. Авиационные радиогидроакустические буи. Зарубежное военное обозрение №6, 1987.
2 А. Бородавкин. Вертолетные системы РГБ. Зарубежное военное обозрение №10, 1990.
3 А. Бородавкин. Совершенствование систем РГБ в ВМС зарубежных стран. Зарубежное военное обозрение №8, 1993.
4 Roger A. Holler. The evolution of the sonobuoy from World War II to the Cold War. Navmar Applied Sciences Corporation Warminster, PA 18974 (Received November 5, 2013).
5 Christopher W. Miller Anurag, Kumar. San Clemente Island Undersea Range Acoustic Experiment, July 2002. Naval Postgraduate School. Monterey, California, November 2003.
Реферат
Блок ретранслятора радиогидроакустического буя, включающий модуль приема координатно-временных параметров, модуль передачи данных, антенный модуль и модуль электропитания с аккумуляторной батареей, отличающийся тем, что блок ретранслятора дополнительно включает микропроцессорный радиомодуль, содержащий связанные посредством электрических связей программируемый микроконтроллер и радиомодем, упомянутый микропроцессорный радиомодуль связан двухпроводной линией электропитания постоянного тока, используемой также как канал передачи данных, с подводным герметичным модулем автоматической радиогидроакустической станции, антенный модуль выполнен в виде единого комбинированного мультидиапазонного антенно-фидерного устройства, обеспечивающего работу приемопередатчика на ультракоротких волнах и прием сигналов глобальных навигационных систем ГЛОНАСС и GPS, при этом антенный модуль подключен ко входу модуля приема координатно-временных параметров и к выходу упомянутого микропроцессорного радиомодуля, к которому подключен модуль электропитания, выполненный в виде модуля гибридного электропитания с возможностью подключения возобновляемых источников энергии.
Формула
Комментарии