1
Изобретение относится к эксплуатации флота, в частности, к подводным
носителям океанографических приборов.
Известен подводный носитель океанографических
приборов, содержащий плавучий корпус с приборной площадкой и подвижный элерон,.смонтированный на
плавучем корпусе и связанный с системой автоматического управления изменением
глубины погружения или удержания плавучего корпуса на заданной глубине,
а также кггбели, связанные с плавучим корпусом i .
Однако известный подводный носитель океанографических приборов характеризуется
низкими .эксплуатационными качествами вследствие недостаточной стабилизации при буксировке на различных
глубинах.
Цель изобретения - улучшение эксплуатационных
качеств подводного носителя путем повышения стабилизации его, при буксировке на различных глубинах;
Поставленная цель .достигается тем, что плавучий корпус выполнен из двух
Частей, жестко связанных между собой
посредством обтекаемой траверсы, при
,этом подвижный элерон смонтирован . Между упомянутыми двумя частями плавучего
корпуса в носовой их оконечности , а приборная площадка располо- 30
жена за подвижным элероном на обтекаемой траверсе.
Кроме того, каждая часть плавучего корпуса содержит форштевень, образе
ванный внутренней плоской и наружной 35 профилированной боковыми стенками, а
также плоскую стенку, при этом форштевень наклонен под острым углом к
плоскости ватерлинии, а вершина упомянутого угла расположена над ватерли- ,Q нией.
Система автоматического управления изменением глубины погружения или
.удержания плавучего корпуса на заданной глубине содержит два сильфона,
размещенных на одной и соответственно другой частях плавучего корпуса, при
этом каждый сильфон снабжен соединенной с ним пневматической магистралью
с клапаном и кинематически связан посредством рычажной передачи с соответствующим
концом подвижного элерона.
Плавучий корпус выполнен из группы
пар частей,-при этом каждая пара частей плавучего корпуса снабжена
смонтированным на ней соединительным элементом, связывающим между србой
кабели, соединенные с каждой парой Упомянутых частей плавучего корпуса.
На фиг. 1 показан подвижный носитель океанографических приборов, общий
вид (аксонометрическая проекция); на фиг. 2 - схема системы автоматического
управления изменением глубины погружения или удержания плавучего корпуса на заданной глубине (вариант
с пневмоцилиндром); на фиг. 3 - вариант системы автоматического управления
изменением глубины погружения, содержащей сивьфон, питаемый сжатым
воздухом; на фиг. 4 - другой вариант автоматического управления, содержащи
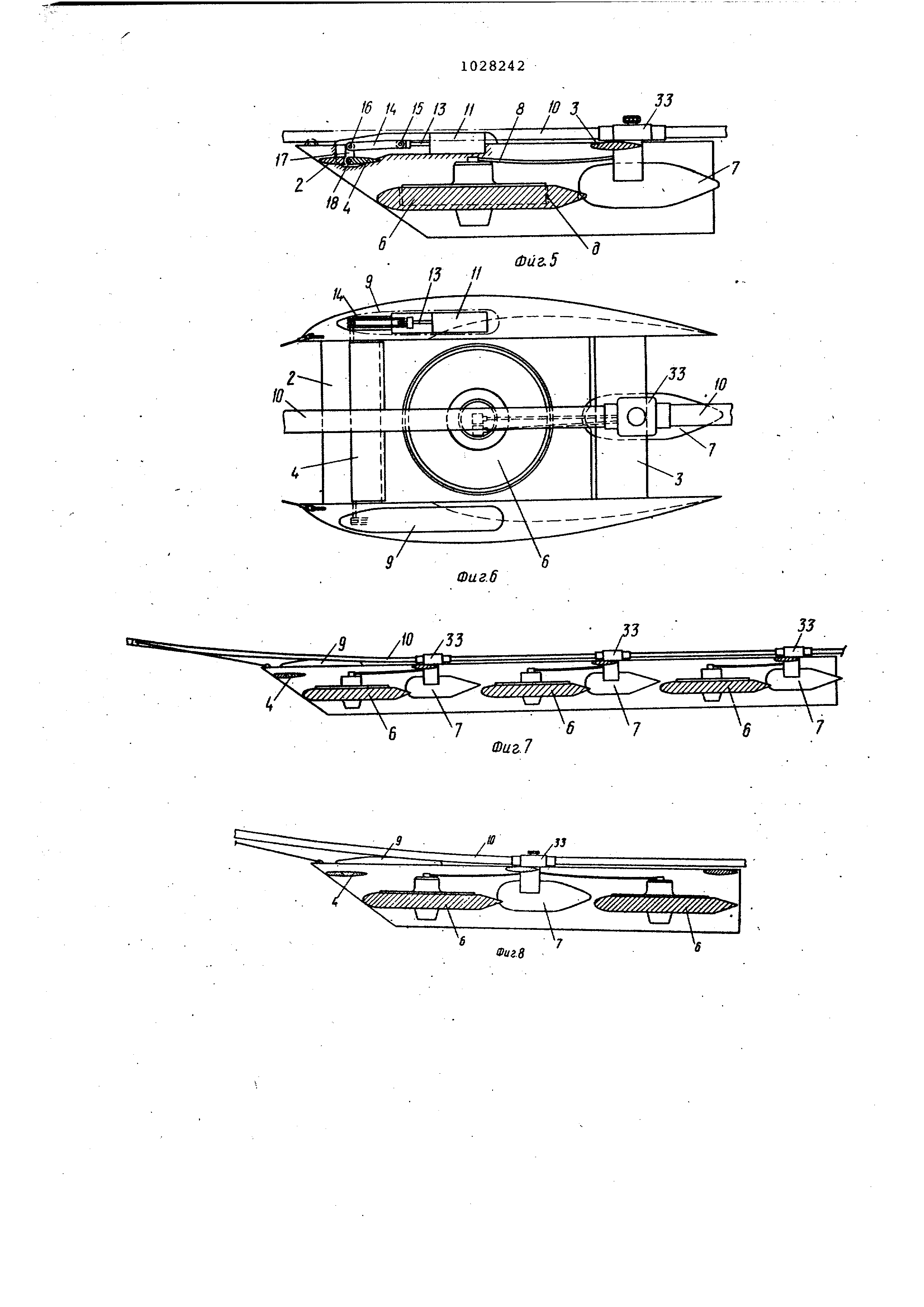
вакуумный сильфон; на фиг. 5 - подводный носитель разрез по фиг. 1; на
фиг. 6 - то же, вид сверху; на фиг.7 подводный носитель, содержащий несколько
источников излучения сейсмических волн; на фиг. 8 - подводный носитель, содержащий два источника
: излучения сейсмических волн; на фиг. 9 - вариант носителя с несколь- ,
кими корпусами, перемещаемыми кабельбуксиром , связанным с кораблем.
Подводный носитель фиг. 1-6 содержит плавучий корпус, выполненный из
двух частей (поплавков) 1 с положи тельной плавучестью. Каждый из поплавков 1 в носовой оконечности имеет
.форштевень d, образованный внутренней плоской и наружной профилированной
боковыми стенками бив. Центр плавучести поплавка 1 расположен значительно вшае центра тяжести. Форштевень
а наклонен под острым углом к . ватерлинии. Такая конструкция является весьма стабильной в воде и имеет
только одно положение равновесия. Поплавок 1 имеет плоскую верхнюю стенку
ъ, . Два поплавка 1 частей плавучего корпуса жестко связаны между собой двумя обтекаемыми траверсами 2 и 3,
по меньшей мере одна из которых, передняя траверса 2, снабжена подвижным
Элероном 4,предназначенным для управления глубиной погружения плавучего
корпуса при ее перемещений в воде. Другая центральная обтекаемая траверса- 5, жестко прикрепленная
к обоим поплавкам, несет передатчик сейсмических волн 6, размещенный на
приборной площадке Э. Этот источник излучения управляется гидроприводом.
Система управлякидих электроклапанов
помещена в герметичном корпусе 7,установленном
на задней; траверсе 3 рыбы. Он связан с источником излучения гибким кабелем 8. Подвижный элерон 4 связан
с системой автоматического управления изменением глубины погружения 9
;С двух сторон, предназначенной для удержания плавучего корпуса на заданной
глубине. Кабели электрического и гидравлического управления различными
маневрами установленных на рлбе элементов объединены в кабель-буксир 10.
Система автоматического управления изменением .глубины погружения (фиг.1
и 2) содержит цилиндр 11, в котором перемещается поршень 12, снабженный
коротким штоком 13. Рычаг 14 шарнирно соедин.ен с концом штока 13 на оси 15,
а второй конец этого рычага на оси 16 соединен с {хлчагом 17, связанным с
подвижным элероном фЭлерон 4 может поворачиваться на своей оси 18.Возвратная
пружина 19 одним концом соединена ,с цилиндром 11,а другим - с рычагом
17.Рабочая полость 20 цилиндра 11 содержит сжатый воздух с давлением,уравровешивающим
гидростатическое давление яа избранной глубине погружения. На этой глубине элерон 4 устанавливается
в нейтральное положение. Трубопровод 21 пневматической магистрали, снабженный
клапаном 22, осуществляет питание рабочей полости 20 сжатьвд воздухом .
в соответствии с первым вариантом исполнения системы автоматического
управления изменением глубины погружения (фиг. 3) сильфон 23 заполнен
сжатым воздухом, уравновешивающим гидростатическое давление на избранной
глубине погружения. Этот сильфон, помещенный- в цилиндр 24 и закрепленный
в нем одним концом, может выходить из цилиндра по продольной оси. Он соединен со 25, на котором
на оси 26 шарнирно установлен рычаг 27, второй конец которого шарнирно
связан осью 16 с рычагом 28, связанным с элероном 4, поворачивающимся
на оси 18. .Т рубопровод 2Д, снабженный клапаном 22, питает сжатым воздухом ; сильфон 23.
В соответствии со вторым варианте исполнения (фиг. 4) система автоматического
управления содержит те же элементы, что и система по фиг. 3, но сильфон 23 выполнен вакуумным, а
не заполнен сжатым воздухом, как в пр едыдущем случае. Откачка воздуха
осуществляется по трубопроводу 21, снабженному клапаном 22. Корме того,
подводной носитель снабжен дополнительной возвратной пружиной 29, закрепленной
одним концом на оси 16, а другим - к TpocjjKy 30, .проходящему через ролик 31 в элемент 32, где он
рйзматывается или наматывается. Кабели питания электроклапанов, размещенных
в герметричном корпусе 7,объединены в кабель-буксире 10 через соединительный
элемент 33 (фиг. 7). Несколько плавучих корпусов связаны с кораблем 34. Поплавки 1 соединены
кабель-буксиром 10 и закреплены на нем фиксаторами 35. Различные кабели
питания и управления, объединенные в кабель-буксир, подключаются соединительными
элементами 33 (фиг. 9), Кабель 34 снабжен барабаном 36 для кабель-буксира и блоком 37. - ;
Подводный носитель океанографических приборов работает следующим образом .
Когда поплавки 1 плавучего- корпуса опускаются ниже заданной глубины,гидростатическое
давление пьвьадется и начинает превышать давление воздуха в полости 20. Оно воздействует на
поршень 12, который входит в цилиндр 11, вызывая перемещение штока 13,
рычагов 14 и 17, который, перемещаясь сбоку поршня, поворачивает элерон 4
на его оси 18. Угол атаки элерона.4 повышается и плавучий корпус поднимается
. Если он поднялся выше заданн-ой глубины, то гидростатическое давление
падает, поршень 12 перемещается к открытому концу цилиндра 11, приводя
в движение шток 13, рычаги 14 и 17. Последний поворачивает элерон 4, угол
атаки которого уменьшается, .и плавуч чий корпус погружается. Пружина 19
предназначена для подъема рыбы на поверхность в случае утечки воздуха
из полости 20, увеличивая угол атаки элерона -: Работа носителя с вариантом исполнения системы автоматического управления изменения глубины погружения по
фиг.. 3 . аналогична работе носителя по фиг. 2. Когда гидростатическое давление
повышается, сильфон 23 сжимается что вызывает перемещение штока 25,
рычагов 27 и 28, а.последний поворачивает элерон 4, вызывая увеличение угла его атаки и подъема плавучего
корпуса. При понижении гидростатического давления сильФон 23 расширяется
шток 25 перемещается в : обратную сторону , вызывая перемещение рычагов 27
и 28 и соответственно поворот элерона в сторону уменьшения угла его атаки.
Плавучий корпус при этом погружается В варианте исполнения системы автоматического
управления изменением глубины погружения по фиг. 4 гидростатическое давление всегда
нлше давления в сильфоне 23, и усилие обеспечивается дополнительной
возвратной пружиной 29, сила растяжения которой уравновешивает ;силу
гидростатического давления на сильфон 23,когла это давление точно соответствует
избранной глубине погружения.Когда плавучий корпус опускается в глубине
и гидростатическое давление повышается сильфон 23 сжимается, вызывая через
шток 25 и рычаг 27 растяжение пружи/4
16
/7
fff
/8
ны 29. Движение элерона то же, что и в предыдущем случае. Когда плавучий
корпус поднимается и гидростатическое давление падает, сильфон 23 расширяется
, вызывая сжатие пружины 29 . и увеличение угла атаки элерона 4. Системы автоматического управления
глубиной погружения очень чувствительны к изменениям глубины и точно отслеживают
заданную глубину погружения.. Когда океанографические исследования закончены, подводный носитель
извлекают из, ьоды, наматывая кабельбуксир 10 на барабан 36, установленный
на корабле, сзади которого имеется блок 37, через который протягивается кабель-буксир 10. Сейсмические
излучатели могут быть заменены любыми другими океанографическими аппаратами
, например гидролокаторами. Кроме того, носитель может нести несколько
подвижных элеронов. В случае установки двух подвижных элеронов на передней
и задней траверсах возможно исг«.. пользование одной системы автоматического
управления обоими элементами, сочлененными между собой. Предложенный подводный носитель
обладает улучшенными эксплуатационными качествами, обусловленными повьпаенной
стабилизацией его при буксировке на различных глубинах.
t6 /4 t5 13 //8 Ш J
-l-L-l-J-, I /
33 L
33
Ch
I
Ш/S





Комментарии