Способы и системы для проведения рекогносцировочных морских сейсмических исследований - RU2695600C2
Код документа: RU2695600C2
Чертежи






Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[01] По этой заявке испрашивается приоритет заявки №14/711154 на патент США, поданной 13 мая 2015 года, под названием ʺMethods and systems for conducting reconnaissance marine seismic surveysʺ и предварительной заявки США №61/994015 под названием ʺMethods and systems for conducting reconnaissance marine seismic surveysʺ, которая была подана 15 мая 2014 года, и обе они полностью включены в эту заявку путем ссылки для всех целей.
УРОВЕНЬ ТЕХНИКИ
[02] В общем, настоящее изобретение относится к регистрации сейсмических данных и в частности, к способам и системам для проведения рекогносцировочных морских сейсмических исследований.
[03] Нефтехимические продукты, такие как нефть и газ, повсеместно распространены в обществе и могут быть использованы во всем, начиная от бензина и кончая детскими игрушками. Вследствие этого потребность в нефти и газе остается высокой. Для удовлетворения этой высокой потребности важно обнаруживать в Земле запасы нефти и газа. Ученые и инженеры проводят исследования, используя, помимо всего прочего, сейсмические и другие волновые способы разведки для обнаружения в Земле нефтяных и газовых коллекторов. Эти способы сейсмической разведки часто включают в себя направление излучения сейсмической энергии в Землю при использовании сейсмического источника энергии (например, динамита, воздушных пушек, вибраторов и т.д.) и мониторинг отклика Земли на сейсмический источник одним или несколькими приемниками, чтобы образовать изображение геологической среды Земли.
[04] Общепринятые морские сейсмические исследования обычно включают в себя буксировку одной или нескольких сейсмических кос со множеством приемников позади регистрирующего судна. Каждый приемник включает в себя, например, датчик давления и/или датчик движения частиц в непосредственной близости друг к другу. Датчик давления может быть, например, гидрофоном, который обеспечивает регистрацию измерений скалярного давления сейсмического волнового поля. Датчик движения частиц может быть, например, трехкомпонентным гидрофоном, который обеспечивает регистрацию измерений векторной скорости сейсмического волнового поля. При наблюдении отраженного сейсмического волнового поля, обнаруживаемого приемником (приемниками) в течение исследования, можно регистрировать геофизические данные, связанные с отраженными сигналами, и эти сигналы можно использовать для формирования изображения, показывающего строение Земли вблизи места исследования.
[05] Могут требоваться большие затраты на регистрацию и обработку данных, собираемых при морских сейсмических исследованиях с буксируемыми сейсмическими косами. Регистрация может быть требующей больших затрат вследствие большого количества оборудования и согласованных действий, необходимых для планирования и выполнения исследования с буксируемыми сейсмическими косами. Обычные трехмерные конфигурации систем регистрации с буксируемыми сейсмическими косами наиболее часто включают в себя 5-15 сейсмических кос, буксируемых вместе с одним или несколькими источниками позади регистрирующего судна, при этом сейсмические косы разнесены на 50-100 м и буксируются на глубине около 10 м. Суда обычно буксируют сейсмические косы по скругленному прямоугольнику, при этом полосы съемки, определяемые сейсмическими косами, перекрываются на 50% или более на последовательных съемочных профилях. Во многих случаях причина такого большого перекрытия заключается в относительно разреженном покрытии съемкой при минимальном диапазоне удалений приемников (то есть, приемников, ближайших к судну и источнику), которое необходимо уплотнять при получении последующих съемочных профилей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[06] Дополнительное понимание сущности и преимуществ настоящего изобретения можно получить при обращении к нижеследующим чертежам. На прилагаемых чертежах аналогичные компоненты или элементы могут иметь одинаковые позиционные обозначения. Кроме того, различные компоненты одного вида могут различаться дефисом после позиционного обозначения и вторым позиционным обозначением, что позволяет провести различие между подобными компонентами. Если в описании используется только первое позиционное обозначение, описание применимо к любому одному из подобных компонентов, имеющему такое же первое позиционное обозначение, независимо от второго позиционного обозначения. На чертежах:
[07] фиг. 1А и 1В - упрощенные схемы системы рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[08] фиг. 2А, 2В и 2С - упрощенные схемы системы рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[09] фиг. 3A, 3B, 3C, 3D, 3E, 3F и 3G - упрощенные схемы системы рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[10] фиг. 4 - упрощенная схема системы рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[11] фиг. 5 - блок-схема последовательности операций, иллюстрирующая способ проведения рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[12] фиг. 6 - упрощенная схема системы рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[13] фиг. 7 - блок-схема последовательности операций, иллюстрирующая способ проведения рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[14] фиг. 8 - упрощенная схема системы рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[15] фиг. 9 - блок-схема последовательности операций, иллюстрирующая способ проведения рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[16] фиг. 10 - упрощенная схема системы рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления;
[17] фиг. 11 - блок-схема последовательности операций, иллюстрирующая способ проведения рекогносцировочного морского сейсмического исследования согласно различным вариантам осуществления; и
[18] фиг. 12 - блок-схема последовательности операций, иллюстрирующая способ объединения данных из морских сейсмических исследований двух различных видов для обработки согласно различным вариантам осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[19] Описываются признаки, большей частью относящиеся к одной или нескольким усовершенствованным системам, способам и/или устройствам, предназначенным для проведения морских рекогносцировочных сейсмических исследований. На фиг. 1А-11 представлены различные геометрии регистрации, предназначенные для регистрации относительно разреженных сейсмических данных при первом, так называемом рекогносцировочном сейсмическом исследовании. Рекогносцировочное сейсмическое исследование может быть первоначальным разведочным исследованием, выполняемым при относительно небольших затратах и/или относительно быстро (по сравнению с традиционными узко- или широкоазимутальными сейсмическими исследованиями). Данные из одного или нескольких этих рекогносцировочных сейсмических исследований, показанных на фиг. 1А-11, можно использовать для планирования дальнейших, более детальных сейсмических исследований, и при необходимости данные из первоначального, рекогносцировочного исследования можно объединять с данными из второго, более детального исследования, чтобы обрабатывать данные для формирования, например, изображения геологической среды. Однако в других вариантах осуществления данные из рекогносцировочного исследования могут использоваться сами по себе и независимо от данных из любых других исследований.
[20] В зависимости от обстоятельств различные процедуры или компоненты в различных вариантах осуществления, описанных в этой заявке, могут опускаться, заменяться или добавляться. Например, следует понимать, что способы могут выполняться в порядке, отличающемся от описанного порядка, и что различные этапы могут добавляться, опускаться или объединяться. Кроме того, аспекты и элементы, описанные применительно к некоторым вариантам осуществления, могут сочетаться в различных других вариантах осуществления. Следует также понимать, что нижеследующие системы, способы, устройства и программное обеспечение индивидуально или совместно могут быть компонентами более крупной системы, при этом другие процедуры могут быть более важными или же может изменяться применение их.
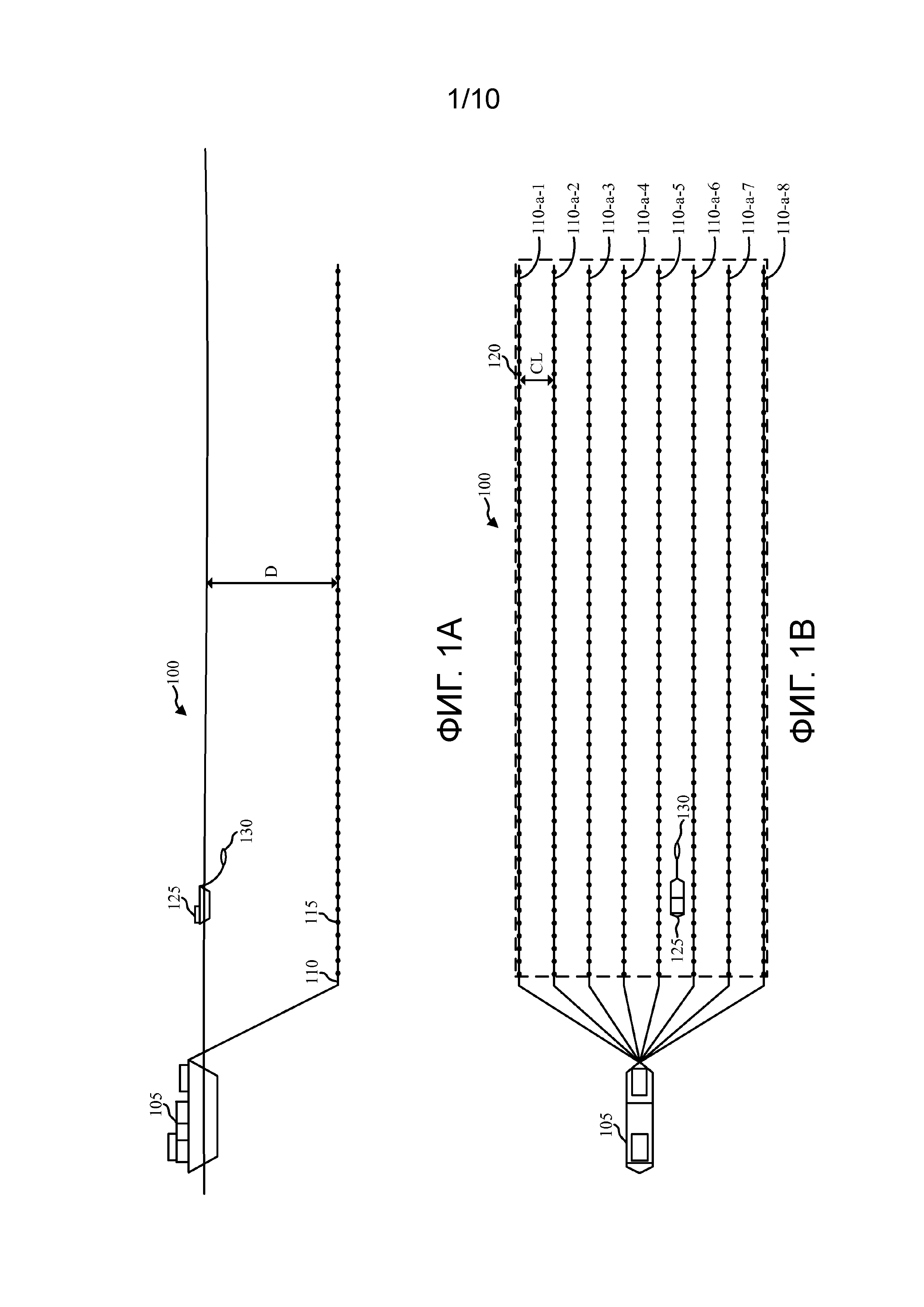
[21] Прежде всего обратимся к фиг. 1А и 1В, на которых показан один пример морской системы 100 регистрации сейсмических данных, пригодной для рекогносцировочных сейсмических исследований, включающей в себя регистрирующее судно 105, буксирующее множество сейсмических кос 110. Каждая из сейсмических кос 110 включает в себя множество приемников 115, а каждый из приемников 115 включает в себя один или несколько датчиков, таких как датчик давления или датчик движения частиц. Как показано на фиг. 1А, сейсмические косы 110 могут буксироваться на глубине D, то есть глубже, чем при обычных исследованиях с буксируемыми сейсмическими косами. Например, сейсмические косы 110 могут буксироваться на глубине 20-30 м. В некоторых вариантах осуществления сейсмические косы 110 могут быть сейсмическими косами переменной глубины или наклонными, при этом приемники 115 в одной сейсмической косе буксируются на множестве различных глубин.
[22] Судно 125 с независимым источником буксирует независимый источник 130 выше одной или нескольких буксируемых сейсмических кос 110. Судно 125 с независимым источником буксирует независимый источник 130 выше одной или нескольких буксируемых сейсмических кос 110 в том смысле, что источник 130 располагается над одним или несколькими участками одной или нескольких сейсмических кос 110 по вертикальному измерению водяного столба. Таким образом, в течение исследования в различные моменты времени источник 130 может располагаться непосредственно над различными приемниками 115 сейсмических кос 110, что позволяет выполнять измерения при нулевых и минимальных удалениях относительно источника 130. Следует понимать, что сейсмические косы 110 обычно буксируются на глубине D, которая в процессе работы делает возможным нахождение судна 125 с независимым источником и буксируемого источника 130 выше сейсмических кос 110 без спутывания или возникновения других проблем, связанных с наложением. Следовательно, как упоминалось выше, сейсмические косы 110 могут буксироваться на глубине D, например, 20-30 м.
[23] В некоторых вариантах осуществления, и как показано на фиг. 1А и 1В, независимый источник 130 заменяет источник (или источники) регистрирующего судна, обычно буксируемые регистрирующим судном 105. Благодаря исключению источника (источников), обычно буксируемого регистрирующим судном 105, сейсмические косы 110 можно буксировать при большем поперечном разносе, чем при обычных сейсмических исследованиях с буксируемыми косами (то есть, можно получать большую общую ширину полосы съемки сейсмическими буксируемыми косами 110). Это показано на фиг. 1В, на которой сейсмические косы 110-а-1, 110-а-2, 110-а-3, 110-а-4, 110-а-5, 110-а-6, 110-а-7, 110-а-8 имеют относительно большой поперечный разнос CL, который может составлять, например, приблизительно 150 м между каждой соседней парой сейсмических кос 110-а-1, 110-а-2, 110-а-3, 110-а-4, 110-а-5, 110-а-6, 110-а-7, 110-а-8. Однако следует также понимать, что в некоторых вариантах осуществления настоящего раскрытия регистрирующее судно 105 все же может буксировать один или несколько источников регистрирующего судна. Кроме того, следует понимать, что разнос 150 м является только одним примером поперечного разноса CL, который можно использовать, и что другой поперечный разнос CL сейсмических кос может больше или меньше этого разноса, в том числе традиционный небольшой поперечный разнос CL. Кроме того, хотя на фиг. 1В показаны только восемь сейсмических кос 110-а-1, 110-а-2, 110-а-3, 110-а-4, 110-а-5, 110-а-6, 110-а-7, 110-а-8, это количество показано только для иллюстрации, и большее или меньшее количество сейсмических кос может буксироваться регистрирующим судном 105.
[24] СО ссылкой на фиг. 1В множество сейсмических кос 110-а-1, 110-а-2, 110-а-3, 110-а-4, 110-а-5, 110-а-6, 110-а-7, 110-а-8 может определять полосу 120 съемки, которая является общей шириной сейсмических кос 110-а-1, 110-а-2, 110-а-3, 110-а-4, 110-а-5, 110-а-6, 110-а-7, 110-а-8. Более конкретно, в некоторых вариантах осуществления полоса 120 съемки может определяться как расстояние между самым левым и самым правым приемниками в сейсмических косах 110-а-1, 110-а-2, 110-а-3, 110-а-4, 110-а-5, 110-а-6, 110-а-7, 110-а-8, буксируемых над данной областью геологической среды. Обычно понятно, что полоса 120 съемки может быть шире или уже, чем покрытие съемкой глубинных площадок общих средних точек (ОСТ) в области геологической среды, иначе говоря, ширина полностью охватываемых участков геологической среды может быть больше или меньше, чем ширина сейсмических кос.
[25] Хотя на фиг. 1А и 1В показано одно судно 125 с независимым источником, буксирующее один независимый источник 130, в других вариантах осуществления, в том числе в нескольких, описываемых ниже, многочисленные судна с независимыми источниками могут буксировать многочисленные независимые источники (то есть, одно или несколько дополнительных суден с независимыми источниками могут буксировать один или несколько соответствующих дополнительных независимых источников выше одной или нескольких буксируемых сейсмических кос). Кроме того, в некоторых вариантах осуществления каждое судно с независимым источником (в том числе в вариантах осуществлениях только одно дополнительное судно с независимым источником) может буксировать два или большее количество независимых сейсмических источников. В этих вариантах осуществления, в которых множество независимых источников буксируются одним или множеством суден с независимыми источниками, независимые источники могут буксироваться на одной и той же или на различных глубинах. Таким образом, например, если первый независимый источник буксируется на глубине 5 м, второй независимый источник может буксироваться на глубине 12 м. Буксировка многочисленных независимых источников 130 над сейсмическими косами 110 может дать несколько различных преимуществ. Например, при многочисленных источниках 130 можно получать большее разнообразие данных из области покрытия общими глубинными точками, поскольку имеется большее количество пар источник-приемник. Кроме того, при многочисленных источниках 130 можно допускать временный вывод из эксплуатации одного из источников (например, если источник 130 неисправен или нуждается в техническом обслуживании) при продолжении работы других источников 130. В некоторых вариантах осуществления пути следования остальных источников 130 могут нуждаться в корректировке для учета источника 130, который был выведен из эксплуатации. Следует понимать, что возможностью продолжения работы дополнительных источников 130 даже после вывода из эксплуатации одного источника 130 можно повысить общий уровень работоспособности системы 100 при продолжении регистрации сейсмических данных, поскольку, например, при использовании только одного источника и отключении этого единственного источника регистрацию может быть придется прекратить до возврата в эксплуатацию единственного источника. Тем не менее, как показано на фиг. 1А и 1В, в некоторых случаях может использоваться только один источник 130.
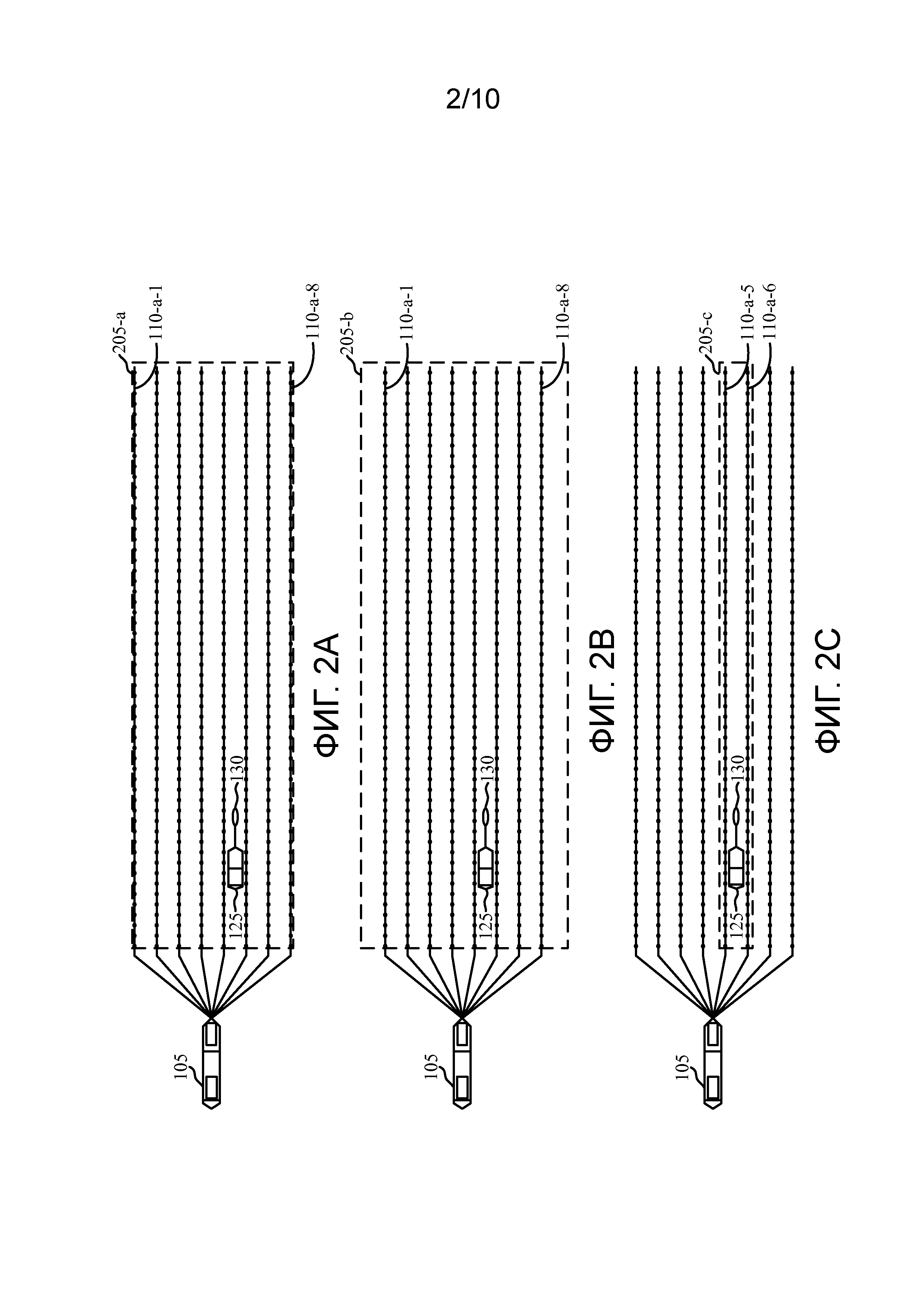
[26] В некоторых вариантах осуществления судно 125 с независимым источником (и следовательно, также и независимый источник 130) может двигаться волнообразно при буксировке выше сейсмических кос 110. Для содействия исследованию района, в пределах которого судно 125 с независимым источником и независимый источник 130 могут двигаться волнообразно, на фиг. 2А-2С показаны различные районы 205-а, 205-b, 205-с плавания источника. Районами 205-а, 205-b, 205-с плавания источника, показанными на фиг. 2А-2С, обычно определяется ширина и в некоторых случаях протяженность участка, в пределах которого судно 125 с независимым источником и/или независимый источник 130 движутся волнообразно. Конечно, в других вариантах осуществления судно 125 с независимым источником может не двигаться волнообразно, а может идти по относительно прямой линии следования, аналогичной линии следования регистрирующего судна 105, или в общем случае может двигаться в районе плавания источника любым образом, в том числе по псевдослучайной схеме, схеме движения вперед и назад, по непрямым линиям и т.д.
[27] На фиг. 2А район 205-а плавания источника приблизительно совмещен с полосой съемки, определяемой сейсмическими косами 110-а-1, 110-а-2, 110-а-3, 110-а-4, 110-а-5, 110-а-6, 110-а-7, 110-а-8, более конкретно, обычно левая и правая (или внешние) стороны района 205-а плавания источника совмещены с соответствующими левой и правой (или внешними) сторонами полосы съемки, определяемой самой левой сейсмической косой 110-а-8 и самой правой сейсмической косой 110-а-1. На фиг. 2В левая и правая (или внешние) стороны района 205-b плавания источника продолжаются за пределы соответствующих левой и правой (или внешних) сторон полосы съемки, определяемой сейсмическими косами 110-а-1, 110-а-2, 110-а-3, 110-а-4, 110-а-5, 110-а-6, 110-а-7, 110-а-8. На фиг. 2С левая и правая (или внешние) стороны района 205-с плавания источника приблизительно совмещены с подполосой съемки, определяемой поднабором из множества сейсмических кос, в частности, на фиг. 2С левая и правая стороны района 205-с плавания источника приблизительно совмещены с сейсмическими косами 110-а-5 и 110-а-6, соответственно. В этой заявке при описании районов 205-а, 205-b, 205-с плавания источника «левая» и «правая» используются для обозначения ширины сейсмических кос в поперечном направлении при наблюдении в направлении к регистрирующему судну 105. Кроме того, хотя на фиг. 2А-2С показаны три примера районов 205-а, 205-b, 205-с плавания источника, они представлены только как примеры, и должно быть понятно, что могут быть определены другие районы плавания источника, в том числе, например, районы плавания источника, охватывающие другие подполосы съемки, и т.д.
[28] Как упоминалось выше, в некоторых вариантах осуществления судно 125 с независимым источником и независимый источник 130 движутся волнообразно в районе плавания источника. Представление о различных районах 205-а, 205-b, 205-c плавания источника можно получить из фиг. 2А-2С, а теперь обратимся к фиг. 3A-3G, на основании которых будет описана схема волнообразного движения судна (суден) 125 с независимым источником (например, заранее проложенный курс, запланированный для суден с независимыми источниками) и независимого источника (источников) 130. Район 205 плавания источника на фиг. 3A-3G может быть любым из районов 205-а, 205-b, 205-c плавания источника, показанных на фиг. 2А-2С, или совершенно другим районом плавания источника.
[29] На фиг. 3А показано одно судно 125-а с независимым источником (буксирующее один или несколько независимых источников, не показанных), движущееся волнообразно между левой стороной 305 района 205 плавания источника и правой стороной 310 района 205 плавания источника по существу по синусоидальной схеме. Судно 125-а с независимым источником продвигается в том же самом общем направлении, что и регистрирующее судно (не показанное на фиг. 3А), при волнообразном движении в районе 205 плавания источника. Аналогично этому, на фиг. 3В-3Е показаны одно или несколько суден-источников, движущихся волнообразно в районе плавания источника по существу по синусоидальной схеме, хотя количество суден с независимыми источниками, расстояния между суднами и конкретная синусоидальная схема, вытекающая из этого, отличаются на каждом чертеже.
[30] Теперь обратимся к фиг. 3В, на которой три судна 125-b-1, 125-b-2, 125-b-3 с независимым источником показаны движущимися волнообразно в районе 205 плавания источника, при этом каждое по существу по синусоидальной схеме. Однако первое судно 125-b-1 с независимым источником движется волнообразно ближе к левой стороне 305, чем второе и третье судна 125-b-2, 125-b-3 с независимыми источниками, третье судно 125-b-3 с независимым источником движется волнообразно ближе к правой стороне 310, чем первое и второе судна 125-b-1, 125-b-2 с независимыми источниками, и второе судно 125-b-2 с независимым источником движется волнообразно между первым и третьим суднами 125-b-1, 125-b-3 с независимыми источниками, так что пути трех суден 125-b-1, 125-b-2, 125-b-3 с независимыми источниками по существу не перекрываются. Иначе говоря, каждое их трех суден 125-b-1, 125-b-2, 125-b-3 с независимыми источниками движется волнообразно по синусоидальной схеме на протяжении соответствующих первого, второго и третьего по существу неперекрывающихся районов плавания подисточников. Отсутствие перекрытия этих районов плавания подисточников может снизить опасность столкновения при использовании многочисленных суден 125-b-1, 125-b-2, 125-b-3 с независимыми источниками, как на фиг. 3В.
[31] На фиг. 3С все три судна 125-с-1, 125-с-2, 125-с-3 с независимыми источниками движутся волнообразно между левой и правой сторонами 305, 310 района 205 плавания источника, но разнесены так, что их синусоидальные линии следования, которые пересекаются, по существу равномерно распределены, в результате чего создается спиральная схема переплетающихся синусоид. Фиг. 3D аналогична фиг. 3С за исключением того, что только два судна-источника 125-d-1, 125-d-2 движутся волнообразно между левой и правой сторонами 305, 310 по разнесенным линиям следования. На фиг. 3Е показано одно судно 125-е с независимым источником, но «частота» синусоидального волнообразного движения не поддерживается постоянной, а вместо этого изменяется для придания большего разнообразия парам источник-приемник в регистрируемых данных.
[32] Теперь обратимся к фиг. 3F и 3G, на которых показаны схемы волнообразного движения, отличающиеся от синусоид. На фиг. 3F два судна 125-f-1, 125-f-2 с независимыми источниками движутся волнообразно по пилообразной схеме, а на фиг. 3G одно судно 125-g с независимым источником движется волнообразно по схеме прямоугольной волны. Должно быть понятно, что судна-источники не обязательно должны двигаться волнообразно по синусоидальной схеме, а в общем случае могут двигаться волнообразно любым заданным способом. Кроме того, как показано на фиг. 3Е, нет необходимости в том, чтобы схема волнообразного движения оставалась постоянной, и она может изменяться, когда судно с независимым источником продвигается в том же общем направлении, что и регистрирующее судно. В общем, хотя на фиг. 3A-3G показаны несколько примеров схем волнообразного движения для одного или нескольких суден с независимыми источниками, должно быть понятно, что имеются многочисленные варианты, которые находятся в объеме настоящего раскрытия. Для одного примера одного такого варианта положим, что схема, показанная на фиг. 3Е, в общем случае является синусоидой с переменной «частотой», но отметим, что «амплитуда» волнообразного движения также может быть переменной (то есть, что судно с независимым источником не проходит весь путь к краям района плавания источника после некоторых поворотов, но проходит весь или выходит за пределы краев после других поворотов). Кроме того, отметим, что пути, показанные на фиг. 3A-3G, могут быть идеализированными путями следования суден с независимыми источниками и что фактические пути следования могут отличаться от показанных путей вследствие наличия факторов окружающей среды (например, ряби на воде), навигационных ограничений (например, неточностей при навигации, относительно большого радиуса поворота суден-источников) и т.д.
[033] Теперь при все еще обращении к фиг. 3A-3G и также возврате к фиг. 1А и 1В будет описано положение судна (суден) 125 с независимым источником относительно регистрирующего судна 105. В некоторых вариантах осуществления судно (судна) 125 с независимым источником могут буксироваться настолько близко к регистрирующему судну 105, насколько это возможно при работе, чтобы максимизировать диапазон смещения данных, регистрируемых с приемников 115 на заднем конце сейсмических кос. Например, первое судно с независимым источником может буксироваться на расстоянии не больше чем 500 м от следующего судна с независимым источником или может буксироваться на расстоянии от следующего судна с независимым источником, которое приблизительно равно половине ширины полосы съемки, определяемой сейсмическими косами (например, 800 м). При использовании более одного судна с независимым источником каждое из суден с независимыми источниками можно буксировать на другом расстоянии от следующего регистрирующего судна, чтобы, например, снижать опасность столкновения и обеспечивать большее разнообразие пар источник-приемник.
[34] Однако в других вариантах осуществления судно (судна) 125 с независимым источником может буксироваться вблизи заднего конца сейсмических кос 110 (например, последнее судно с независимым источником буксируется на расстоянии не больше чем 500 м от заднего конца сейсмических кос 110), и этим опять можно максимизировать диапазон смещений данных, регистрируемых с приемников 115, исключая в этом случае максимальные удаления, предполагаемые для приемников 115, ближайших к регистрирующему судну.
[35] Теперь со ссылкой на фиг. 4 будут описаны некоторые преимущества регистрации данные при сейсмическом исследовании, показанном на фиг. 1A-3G. Как показано на фиг. 4 пунктирными линиями, в том же самом районе регистрировался предшествующий съемочный профиль, при этом полоса съемки на предшествующем проходе, определяемая сейсмическими косами, показана как 120-d-1. На последующем съемочном профиле судно 105 опять показано буксирующим сейсмические косы, определяющие вторую полосу 120-d-2 съемки, при этом между первой и второй полосами 120-d-1, 120-d-2 съемки показана область 405 пространственного перекрытия. В одном варианте осуществления ширина (в поперечном направлении) области 405 пространственного перекрытия может составлять не больше чем 5, 10, 15, 20, 25 или 30% общей ширины (в поперечном направлении) одной или обеих полос 120-d-1, 120-d-2 съемки или в другом варианте осуществления может не быть области перекрытия, а вместо нее может быть промежуток между полосами 120-d-1, 120-d-2 съемки. Перекрытие между последовательными съемочными профилями, если таковое имеется, может быть меньше, чем при обычных исследованиях, поскольку разнообразием данных, регистрируемых от движущихся волнообразно суден-источников, может гарантироваться достаточно данных для регуляризации сейсмического изображения при использовании интерполяции во время этапа обработки сейсмических данных. Иначе говоря, применительно к фиг. 1A-3G регистрацией данных, описанной выше, можно исключать значительное перекрытие (например, на 50%) при получении последовательных съемочных профилей вследствие разнообразия данных источник-приемник (включая покрытие съемкой при небольших удалениях), регистрируемых при буксировке одного или нескольких суден с независимыми источниками над одной или несколькими регистрирующими сейсмическими косами.
[36] На фиг. 5 согласно некоторым аспектам настоящего раскрытия представлена блок-схема последовательности операций, иллюстрирующая способ 500 регистрации сейсмических данных при использовании системы 100, показанной на фиг. 1А-4. Согласно блоку 505 множество сейсмических кос буксируются позади регистрирующего судна, при этом полоса съемки определяется множеством сейсмических кос. Согласно блоку 510 один или несколько независимых источников буксируются одним или несколькими соответствующими суднами с независимым источником выше одной или нескольких из множества сейсмических кос. Как описывалось выше, одно или несколько суден с независимыми источниками могут двигаться волнообразно в заданном районе плавания источника.
[37] В другом предполагаемом варианте осуществления может быть определен район исследований, в котором сосредоточена расстановка морских донных кабелей или морских донных узлов (например, вместо буксируемых сейсмических кос, описанных выше), и один или несколько независимых источников могут буксироваться одним или несколькими суднами с независимыми источниками при волнообразном движении (как описано, например, выше со ссылкой на фиг. 3A-3G) в районе плавания источника, при этом район плавания источника соответствует одному из множества подрайонов в районе исследований. В одном примере подрайоны района исследований могут обозначать сеть, при этом сеть включает в себя по меньшей мере два подрайона с размером по ширине и по меньшей мере два подрайона с размером по высоте. Сеть и подрайоны могут или не могут быть прямоугольными, а подрайоны могут или не могут быть одинакового размера. В некоторых вариантах осуществления каждый из множества подрайонов района исследований может быть меньше, чем полный район исследований (например, меньше чем 50%, 40%, 30%, 20%, 10%, 5% и т.д. размера всего района исследований). В подрайонах судно с независимым источником может двигаться волнообразно или двигаться любым способом, описанным выше, а подрайоны могут иметь ширину меньше заданной и протяженность меньше заданной, каждая из которых меньше, чем соответствующая полная ширина и полная протяженность района исследований. Район исследований может быть совмещен с расположением морских донных кабелей или морских донных узлов или может продолжаться за пределы таковых.
[38] В некоторых вариантах осуществления морскими донными кабелями или морскими донными узлами может обозначаться сеть, над которой могут двигаться волнообразно одно или несколько суден с независимыми источниками. В этих вариантах осуществления одно или несколько суден с независимыми источниками могут двигаться волнообразно над сетью, обозначенной морскими донными узлами или морскими донными кабелями, таким образом, что судно с независимым источником проходит через линии сети, обозначенные отдельными кабелями или узлами, а не проходит вдоль линий сети, обозначенных кабелями или узлами. Прохождение через линии сети, обозначенные кабелями или узлами, можно считать аналогичным перемещению любого вида судна-источника, описанному выше, в том числе волнообразным движениям, показанным на фиг. 3A-3G, например, судно с независимым источником может двигаться волнообразно вперед и назад между двумя линиями сети (или в общем случае в любом районе плавания источника, основанном на линиях сети кабелей или узлов).
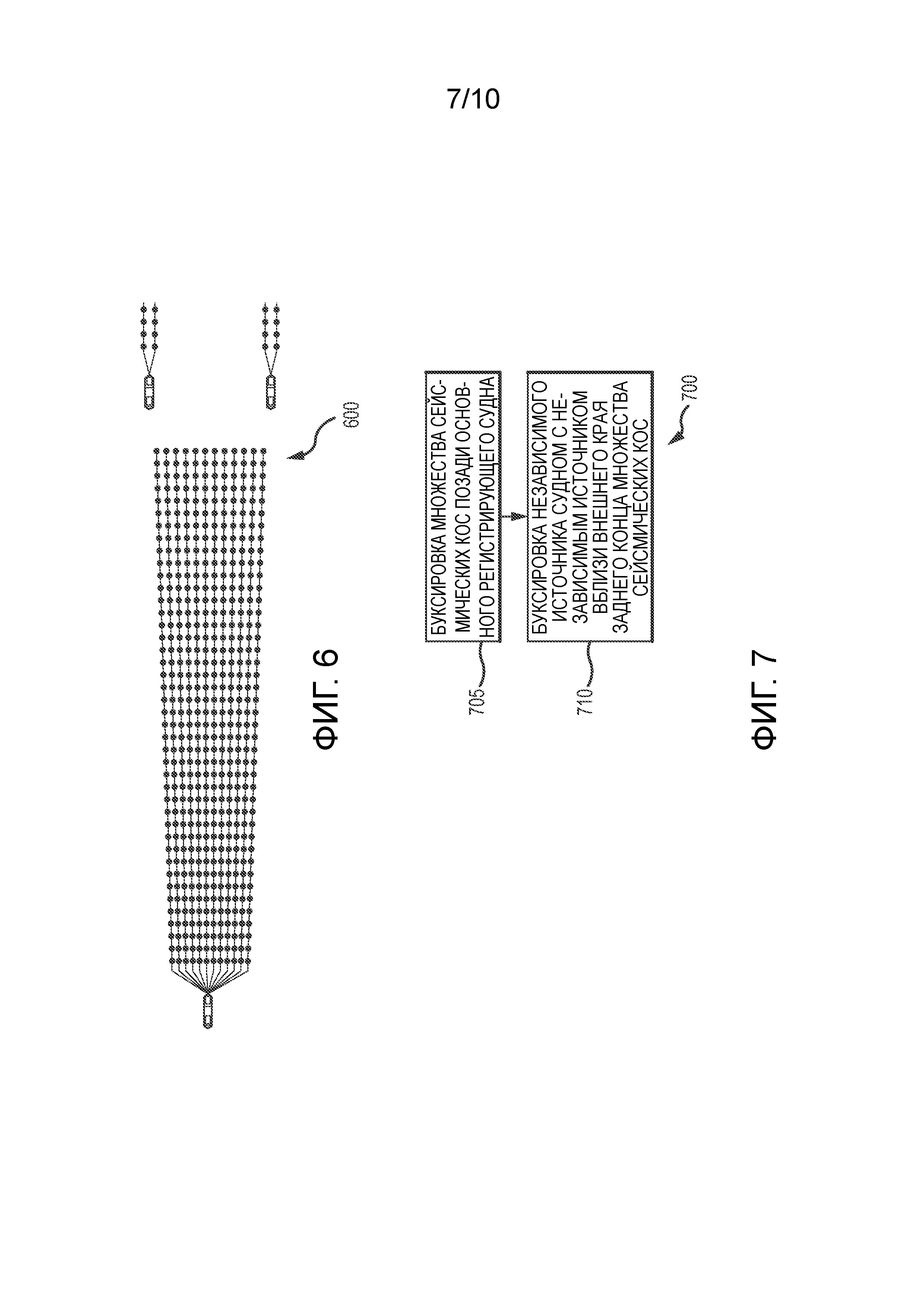
[39] Теперь обратимся к фиг. 6, на которой показан другой пример системы 600 регистрации, пригодной для рекогносцировочных сейсмических исследований, и к фиг. 7, на которой согласно некоторым аспектам настоящего раскрытия представлена блок-схема последовательности операций способа 700 регистрации сейсмических данных при использовании системы 600, показанной на фиг. 6. Согласно блоку 705, и как показано на фиг. 6, множество сейсмических кос буксируются позади основного регистрирующего судна, при этом множеством сейсмических кос определяется основная полоса съемки. Согласно блоку 710, и как показано на фиг. 6, независимый источник буксируется судном с независимым источником вблизи внешнего края заднего конца множества сейсмических кос.
[40] Что касается все еще фиг. 6 и 7, то в некоторых вариантах осуществления независимый источник может быть первым независимым источником, судно с независимым источником может быть первым судном с независимым источником, а внешний край может быть самой левой сейсмической косой из множества сейсмических кос, и способ 700 может также включать в себя буксировку второго независимого источника вторым судном с независимым источником вблизи заднего конца самой правой сейсмической косы из множества сейсмических кос. Кроме того, способ 700 может включать в себя буксировку одной или нескольких сейсмических кос позади каждого из первого и второго суден с независимыми источниками, а длина одной или нескольких сейсмических кос, буксируемых позади каждого из первого и второго суден с независимыми источниками, может быть меньше, чем половина длины множества сейсмических кос, буксируемых позади основного регистрирующего судна. Например, каждая из одной или нескольких сейсмических кос, буксируемых позади каждого из первого и второго суден с независимыми источниками, может быть длиной не больше чем 2 км.
[41] В некоторых вариантах осуществления по меньшей мере одна из одной или нескольких сейсмических кос, буксируемых позади одного из первого и второго суден с независимыми источниками, может буксироваться в основной полосе съемки, определяемой множеством сейсмических кос, буксируемых основным регистрирующим судном, и/или по меньшей мере одна из одной или нескольких сейсмических кос, буксируемых позади одного из первого и второго суден с независимыми источниками, может буксироваться вне основной полосы съемки, определяемой множеством сейсмических кос, буксируемых основным регистрирующим судном. Множество сейсмических кос, буксируемых позади основного регистрирующего судна, и одна или несколько сейсмических кос, буксируемых позади первого и второго суден с независимыми источниками, вместе взятые, в некоторых вариантах осуществления могут собирать данные, связанные с первым независимым источником, вторым независимым источником и третьим независимым источником, связанным с основным регистрирующим судном, а данные, собираемые одной или несколькими сейсмическими косами, буксируемыми позади первого и второго суден с независимыми источниками, могут использоваться для обеспечения покрытия съемкой при минимальном удалении, не достигаемого при данных, собираемых множеством сейсмических кос, буксируемых позади основного регистрирующего судна.
[42] В некоторых вариантах осуществления множество сейсмических кос может буксироваться позади основного регистрирующего судна по первой линии следования, основная полоса съемки может быть первой основной полосой съемки, связанной с первой линией следования, а способ 700 может также включать в себя буксировку множества сейсмических кос позади основного регистрирующего судна по второй линии следования, расположенной рядом с первой линией следования, благодаря чему определяется вторая основная полоса съемки. Первая и вторая основные полосы съемки могут пространственно перекрываться не больше чем на 20% или могут по существу не перекрываться. Основное регистрирующее судно не может буксироваться между первой и второй линиями следования.
[43] В некоторых вариантах осуществления задний конец множества сейсмических кос может быть свободным концом сейсмических кос, наиболее удаленным от основного регистрирующего судна. Кроме того, независимый источник может буксироваться на расстоянии 100 м или большем после заднего конца множества сейсмических кос и/или может буксироваться рядом с самой левой или самой правой сейсмической косой из множества сейсмических кос, но перед задним концом множества сейсмических кос.
[44] В некоторых вариантах осуществления судно с независимым источником может двигаться волнообразно между самым левым краем района плавания источника и самым правым краем района плавания источника. Источник может буксироваться позади основного регистрирующего судна. В некоторых вариантах осуществления множество сейсмических кос могут быть развернуты веером для образования клина или могут буксироваться по прямым линиям, параллельным друг другу.
[45] В некоторых вариантах осуществления судно с независимым источником может буксироваться на заданном расстоянии от внешнего края заднего конца множества сейсмических кос, при этом заданное расстояние составляет, например, не больше чем 15% полной длины множества сейсмических кос.
[46] Теперь обратимся к фиг. 8, на которой показан еще один пример системы 800 регистрации, пригодной для рекогносцировочных сейсмических исследований, и к фиг. 9, на которой согласно некоторым аспектам настоящего раскрытия представлена блок-схема последовательности операций, иллюстрирующая способ 900 регистрации сейсмических данных при использовании системы 800, показанной на фиг. 8. Согласно блоку 905, и как показано на фиг. 8, первое множество сейсмических кос буксируется позади первого основного регистрирующего судна. Согласно блоку 910, и как показано на фиг. 8, второе множество сейсмических кос буксируется позади второго основного регистрирующего судна, при этом второе множество сейсмических кос буксируется с поперечным смещением и позади первого множества сейсмических кос. Согласно блоку 915, и как показано на фиг. 8, независимый источник может буксироваться судном с независимым источником между первым множеством сейсмических кос и вторым множеством сейсмических кос.
[47] Что касается все еще фиг. 8 и 9, то в некоторых вариантах осуществления носовая часть второго основного судна никогда не выдвигается с опережением заднего конца первого множества сейсмических кос. Кроме того, в некоторых вариантах осуществления, независимый источник может буксироваться позади заднего конца первого множества сейсмических кос и/или перед носовой частью второго основного судна.
[48] В некоторых вариантах осуществления первое множество сейсмических кос может буксироваться по первой линии следования, второе множество сейсмических кос может буксироваться по второй линии следования, параллельной первой линии следования, а судно с независимым источником, когда оно продвигается, может двигаться волнообразно между первой и второй линиями следования. Первое и второе множества сейсмических кос могут быть развернуты веером, когда они буксируются позади соответствующих первого и второго основных регистрирующих суден. Первое и второе множества сейсмических кос могут определять первую объединенную полосу съемки, когда они буксируются позади первого и второго основных регистрирующих суден по соответствующим первой и второй линиям следования, а способ 900 может также включать в себя буксировку первого и второго множеств сейсмических кос позади первого и второго основных регистрирующих суден по соответствующим третьей и четвертой линиям следования, расположенными рядом с первой и второй линиями следования, вследствие чего определяется вторая объединенная полоса съемки, при этом первая и вторая объединенные полосы съемки пространственно перекрываются не больше чем на 12,5%, 15% или 25%.
[49] В некоторых вариантах осуществления способ 900 может также включать в себя буксировку первого источника регистрирующего судна позади первого основного регистрирующего судна и второго источника регистрирующего судна позади второго основного регистрирующего судна, и первое множество сейсмических кос может буксироваться по первой линии следования, второе множество сейсмических кос может буксироваться по второй линии следования, параллельной первой линии следования, и независимый источник может буксироваться по третьей линии следования, при этом третью линию следования планируют так, чтобы обеспечивалось покрытие съемкой при минимальном удалении «промахов» со стороны пар источник-приемник, связанных с первым и вторым источниками регистрирующих суден. В некоторых вариантах осуществления эта третья линия следования может быть ближе к первой линии следования, чем к второй линии следования.
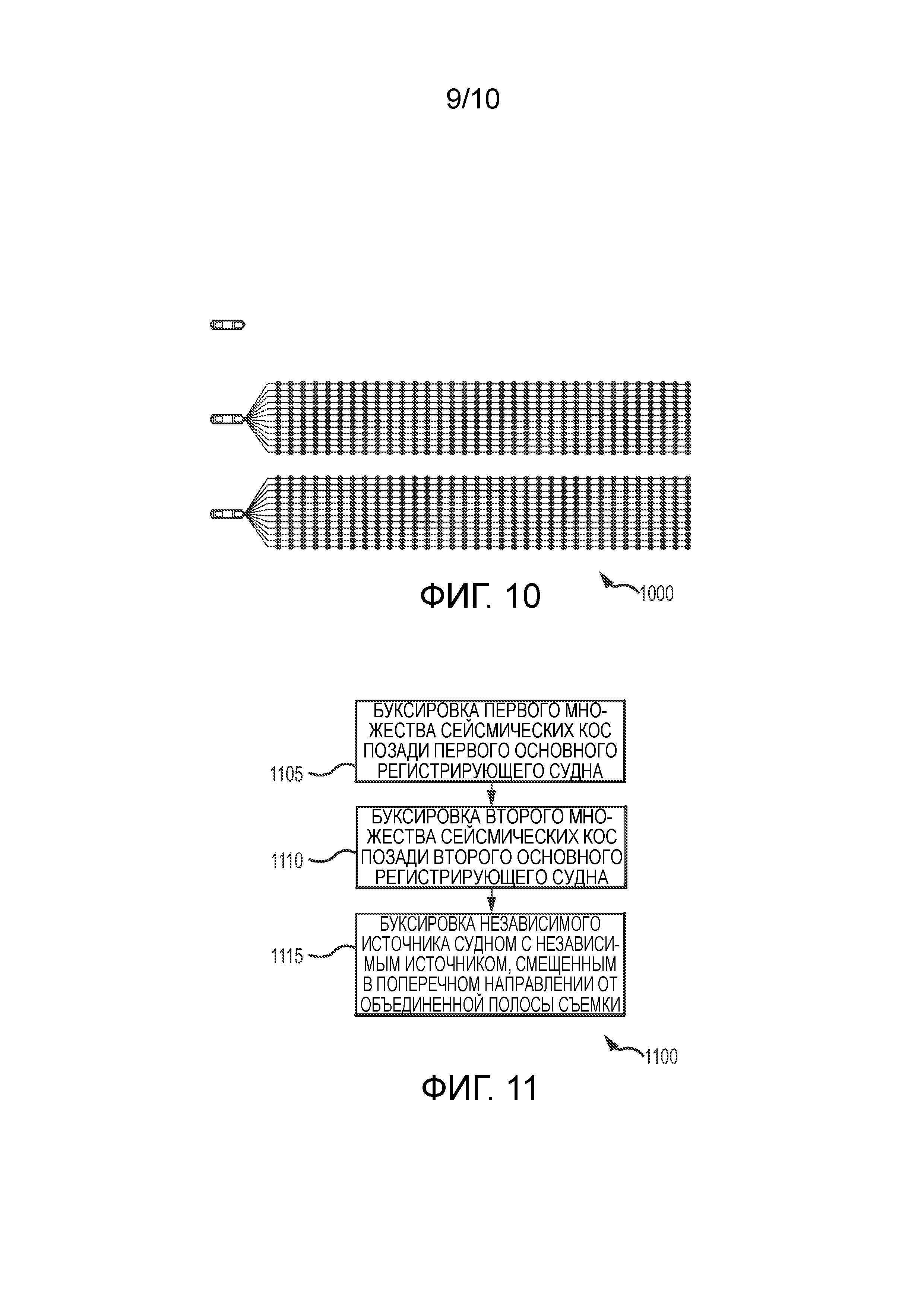
[50] Теперь обратимся к фиг. 10, на которой показан еще один пример системы 1000 регистрации, пригодной для рекогносцировочных сейсмических исследований, и к фиг. 11, на которой согласно некоторым аспектам настоящего раскрытия представлена блок-схема последовательности операций способа 1100 регистрации сейсмических данных при использовании системы 1000, показанной на фиг. 10. Согласно блоку 1105, и как показано на фиг. 10, первое множество сейсмических кос буксируется позади первого основного регистрирующего судна. Согласно блоку 1110, и как показано на фиг. 10, второе множество сейсмических кос буксируется позади второго основного регистрирующего судна, при этом второе множество сейсмических кос по существу параллельно первому множеству сейсмических кос, первое и второе множество сейсмических кос определяют объединенную полосу съемки. Согласно блоку 1110, и как показано на фиг. 11, независимый источник может буксироваться судном с независимым источником, смещенным в поперечном направлении от объединенной полосы съемки.
[51] Что касается все еще фиг. 10 и 11, то в некоторых вариантах осуществления первое и второе основные регистрирующие судна могут продвигаться в ряд по соответствующим первой и второй линиям следования, и судно с независимым источником также может продвигаться в ряд с первым и вторым основными регистрирующими суднами по третьей линии следования. Первая, вторая и третья линии следования могут быть по существу параллельны друг другу, а вторая линия следования может быть по существу равноудалена от первой и третьей линий следования. В других вариантах осуществления судно с независимым источником может продвигаться по третьей линии следования перед первым и вторым основными регистрирующими суднами.
[52] В некоторых вариантах осуществления судно с независимым источником может двигаться волнообразно между первой и второй линиями следования или в общем случае между любыми заданными двумя линиями. Объединенная полоса съемки может быть первой объединенной полосой съемки, а в некоторых вариантах осуществления способ 1100 может также включать в себя буксировку первого и второго множеств сейсмических кос по соответствующим третьей и четвертой линиям следования, расположенными рядом с первой и второй линиями следования, вследствие чего определяется вторая объединенная полоса съемки, при этом первая и вторая объединенные полосы съемки пространственно перекрываются не больше чем на 10% или по существу не перекрываются вовсе.
[53] В некоторых вариантах осуществления первое и второе множества сейсмических кос могут буксироваться настолько близко друг к другу, насколько возможно при работе, например, так, чтобы самая левая сейсмическая коса из первого множества сейсмических кос и самая правая сейсмическая коса из второго множества сейсмических кос находились на расстоянии не больше чем 1500 м. Кроме того, в некоторых вариантах осуществления первое множество сейсмических кос может буксироваться на первой глубине и второе множество сейсмических кос может буксироваться на второй глубине, большей, чем первая глубина, так что менее вероятно спутывание сейсмических кос (например, в случае, когда одному основному регистрирующему судну требуется прекратить регистрацию, тогда как другому продолжить).
[54] Что касается теперь систем 100, 600, 800, 1000 и связанных способов, описанных выше со ссылкой на фиг. 1А-11, то следует понимать, что системы 100, 600, 800, 1000 могут быть пригодны для регистрации относительно разреженных сейсмических данных при широких полосах съемки, с приемлемым качеством данных и интерпретируемыми на районном уровне данными, и это все может достигаться в течение более короткого периода времени и/или с меньшими затратами, чем при обычных сейсмических исследованиях с буксируемыми сейсмическими косами, благодаря использованию эффективных геометрий регистрации.
[55] На фиг. 12 представлена блок-схема последовательности операций, иллюстрирующая способ согласно опять же дополнительным аспектам настоящего раскрытия. Согласно блоку 1205 сейсмические данные могут регистрироваться при первом рекогносцировочном сейсмическом исследовании (при использовании, например, одной из систем 100, 600, 800, 1000, описанных выше). Согласно блоку 1210 дополнительные сейсмические данные могут регистрироваться при втором, более детальном сейсмическом исследовании и согласно блоку 1215 данные из первого и второго исследований могут объединяться, а объединенные наборы данных могут обрабатываться совместно (например, для формирования изображения геологической среды). Обычно отличие между первым и вторым сейсмическими исследованиями может заключаться в расстояниях в поперечном направлении между сейсмическими косами, скорости движения регистрирующего судна (и/или судна с независимым источником, если таковое имеется) и т.д.
[56] Следует отметить, что способы, системы и устройства, рассмотренные выше, предполагаются быть только примерами. Следует подчеркнуть, что различные варианты осуществления могут опускаться, заменяться или при необходимости могут добавляться различные процедуры или компоненты. Например, следует понимать, что в альтернативных вариантах осуществления способы могут выполняться в порядке, отличающемся от описанного, и что различные этапы могут добавляться, опускаться или объединяться. Кроме того, признаки, описанные применительно к некоторым вариантам осуществления, могут быть включены в различные другие варианты осуществления. Различные аспекты и элементы из вариантов осуществления могут быть объединены аналогичным образом. Кроме того, следует особо отметить, что технология развивается и поэтому многие из элементов являются примерными по своей сущности и не должны интерпретироваться как ограничивающие объем изобретения.
[57] Конкретные детали приведены в описании для обеспечения полного понимания вариантов осуществления. Однако специалисту в данной области техники должно быть понятно, что варианты осуществления могут быть осуществлены на практике без этих конкретных деталей. Например, хорошо известные структуры и способы были показаны без излишних деталей, чтобы исключить затруднение понимания вариантов осуществления.
[58] Кроме того, следует отметить, что варианты осуществления могли быть описаны как способ, который отображался как схема последовательности операций или блок-схема. Хотя на каждой схеме операции могли представляться как последовательный способ, многие из операций можно выполнять параллельно или одновременно. Кроме того, порядок операций можно изменять. Способ может иметь дополнительные этапы, не включенные в чертеж.
[59] При наличии описанных нескольких вариантов осуществления специалистам в данной области техники должно быть понятно, что различные модификации, альтернативные конструкции и эквиваленты можно использовать без отступления от сущности изобретения. Например, показанные выше элементы могут быть всего лишь компонентом более крупной системы, при этом другие правила могут иметь приоритет или же может изменяться применение изобретения. Кроме того, некоторое количество этапов может быть выполнено до, в течение или после учета упомянутых выше элементов. В соответствии с этим приведенное выше описание не следует воспринимать как ограничивающее объем изобретения.
Реферат
Изобретение относится к области геофизики и может быть использовано при проведении морских сейсмических исследований. Раскрыты способы, системы и устройства, предназначенные для проведения рекогносцировочных морских сейсмических исследований. В одном примере способа регистрации данных морского сейсмического исследования множество сейсмических кос (110) буксируют позади регистрирующего судна (105), при этом множество сейсмических кос определяет полосу (120) съемки. Независимый источник (130) буксируется судном (125) независимого источника выше одной или нескольких из множества буксируемых сейсмических кос (110). При этом судно с независимым источником движется вперед и назад между левой стороной района плавания источника и правой стороной района плавания источника так, чтобы пересекать по меньшей мере часть полосы съемки, когда судно с независимым источником продвигается в том же самом общем направлении, что и регистрирующее судно. Технический результат – повышение информативности получаемых данных. 3 н. и 26 з.п. ф-лы, 12 ил.
Комментарии