Сейсмический датчик с датчиками перемещения снижения шума - RU2678261C2
Код документа: RU2678261C2
Чертежи









Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[01] В соответствии с §119(е) раздела 35 Кодекса законов США по этой заявке испрашивается преимущество приоритета предварительной заявки № 61/883054 на патент США, поданной 26 сентября 2013 года, под названием “Seismic Sensor”, которая тем самым полностью включается в эту заявку путем ссылки для всех целей.
УРОВЕНЬ ТЕХНИКИ
Область техники
[02] В общем изобретение относится к морским сейсмическим исследованиям и в частности, к компоновкам датчиков для сбора сейсмических данных.
Описание предшествующего уровня техники
[03] При морских сейсмических исследованиях с буксированием матрицу гидрофонов буксируют позади морского судна вблизи поверхности моря. Гидрофоны устанавливают в многочисленных чувствительных кабелях, обычно называемых буксируемыми косами. Буксируемые косы служат платформами для гидрофонов. Сейсмический источник звука, также буксируемый вблизи поверхности моря, периодически излучает акустическую энергию. Представляющая интерес акустическая энергия распространяется вниз через море, отражается от нижележащих структур или подводных страт и возвращается вверх через море к матрице гидрофонов. Отраженная сейсмическая энергия приходит на точки приема буксируемой матрицы. Матрица гидрофонов содержит много таких точек приема, а в записи с каждой из точек приема содержится восходящий сейсмический акустический импульс от морского дна. Впоследствии записи с гидрофонов обрабатывают с получением сейсмических изображений нижележащих структур.
[04] Шум является основным фактором, который необходимо учитывать при работе буксируемых кос. Источники шума включают в себя шум от волнения на море и шум волн на поверхности моря. Кроме того, буксирование косы в воде также вызывает шум. Часть этого шума распространяется по буксируемой косе и часть через сам водяной столб. Наличие такого шума может неблагоприятно влиять на точность изображения геологической среды. В соответствии с этим имеется необходимость в усовершенствованной системе датчиков, предназначенной для регистрации сейсмических данных, в которой сейсмические данные захватываются системой датчиков, но шум по существу подавляется.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[05] В первом аспекте раскрыта сейсмическая кабельная система датчиков. Сейсмическая кабельная система датчиков может включать в себя кабель, первый датчик, выполненный с возможностью измерения перемещения кабеля, при этом из измерения перемещения первым датчиком по существу исключено движение частиц, связанное с сейсмическими волнами, и второй датчик, выполненный с возможностью измерения движения частиц, связанного с сейсмическими волнами.
[06] В некоторых осуществлениях второй датчик также выполнен с возможностью измерения перемещения кабеля. Второй датчик может быть выполнен с возможностью непринятия во внимание перемещения кабеля. Первый датчик может быть связан с одним или несколькими элементами напряжения кабеля. Первый датчик может быть заключен в область с границами, ослабляющими давление и движение частиц. Кроме того, первый датчик может быть развязан от оболочки кабеля.
[07] В других осуществлениях второй датчик помещен между парой компонентов буксируемой косы и при этом компоненты буксируемой косы прижаты к оболочке кабеля. Может быть случай, в котором длина отрезка кабеля, заданная парой компонентов буксируемой косы, выбрана так, что отрезок резонирует на резонансной частоте, выбранной в зависимости от сейсмических волн. В дополнение к этому второй датчик связан с оболочкой кабеля.
[08] В других осуществлениях первый датчик и второй датчик встроены в одну или несколько монтажных опор датчиков. Первый датчик и второй датчик могут быть инерциальными датчиками. В дополнение к этому кабель может быть одним из кабеля буксируемой косы, морского донного кабеля и кабеля, расположенного неподвижно на любой глубине или в любой ориентации в водяном столбе.
[09] Во втором аспекте раскрыт способ сбора сейсмических данных. Способ сбора сейсмических данных может включать в себя определение первого измерения первым сейсмическим датчиком, при этом первый сейсмический датчик выполняют с возможностью измерения перемещения платформы сейсмической системы датчиков, при этом из измерения перемещения первым датчиком исключают движение частиц, связанное с сейсмическими волнами, определение второго измерения по второму сейсмическому датчику, при этом второй сейсмический датчик выполняют с возможностью измерения движения частиц, и объединение первого измерения и второго измерения для образования сигнала сейсмических данных с ослабленным шумом.
[10] В некоторых осуществлениях сигнал второго измерения содержит перемещение платформы. Из сигнала второго измерения может по существу исключаться перемещение платформы. Первый датчик может быть связан с одним или несколькими элементами напряжения сейсмического кабеля. В дополнение к этому первый датчик развязывают от оболочки кабеля.
[11] В некоторых осуществлениях второй датчик помещают между парой компонентов буксируемой косы и компоненты буксируемой косы прижимают к оболочке кабеля. Может быть случай, в котором длину отрезка кабеля, заданную парой компонентов буксируемой косы, выбирают так, что отрезок резонирует на резонансной частоте, выбранной в зависимости от сейсмических волн. В дополнение к этому второй датчик может быть связан с оболочкой кабеля.
[12] В других осуществлениях первый датчик и второй датчик встраивают в одну или несколько монтажных опор датчиков. Первый датчик может быть заключен в область с границами, ослабляющими давление и движение частиц. В дополнение к этому первый датчик и второй датчик могут быть инерциальными датчиками.
[13] В третьем аспекте раскрыта морская донная сейсмическая система датчиков. Морская донная сейсмическая система датчиков может включать в себя датчик шума, выполненный с возможностью измерения перемещения, при этом из измерения перемещения датчиком шума по существу исключено движение частиц, связанное с сейсмическими волнами, и датчик движения частиц, выполненный с возможностью измерения движения частиц, связанного с сейсмическими волнами, при этом датчик движения частиц связан с системой подвески, выполненной с возможностью резонирования ниже заданной представляющей интерес частоты. В некоторых случаях первый датчик и второй датчик выполнены так, что имеют по существу одинаковый отклик для перемещения кабеля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
[14] фиг. 1 - иллюстрация типовых сейсмических исследований согласно варианту осуществления изобретения;
[15] фиг. 2 - график, показывающий двумерное представление отклика датчика скорости частиц;
[16] фиг. 3 - график, показывающий двумерное представление отклика всенаправленного гидрофона, суммированной с откликом вертикального датчика движения частиц;
[17] фиг. 4 - иллюстрация энергии, сообщаемой буксируемым косам при изменениях скорости и рыскании;
[18] фиг. 5 - вид сбоку, иллюстрирующий наведенные энергией ускорения и поперечные волны в буксируемой косе;
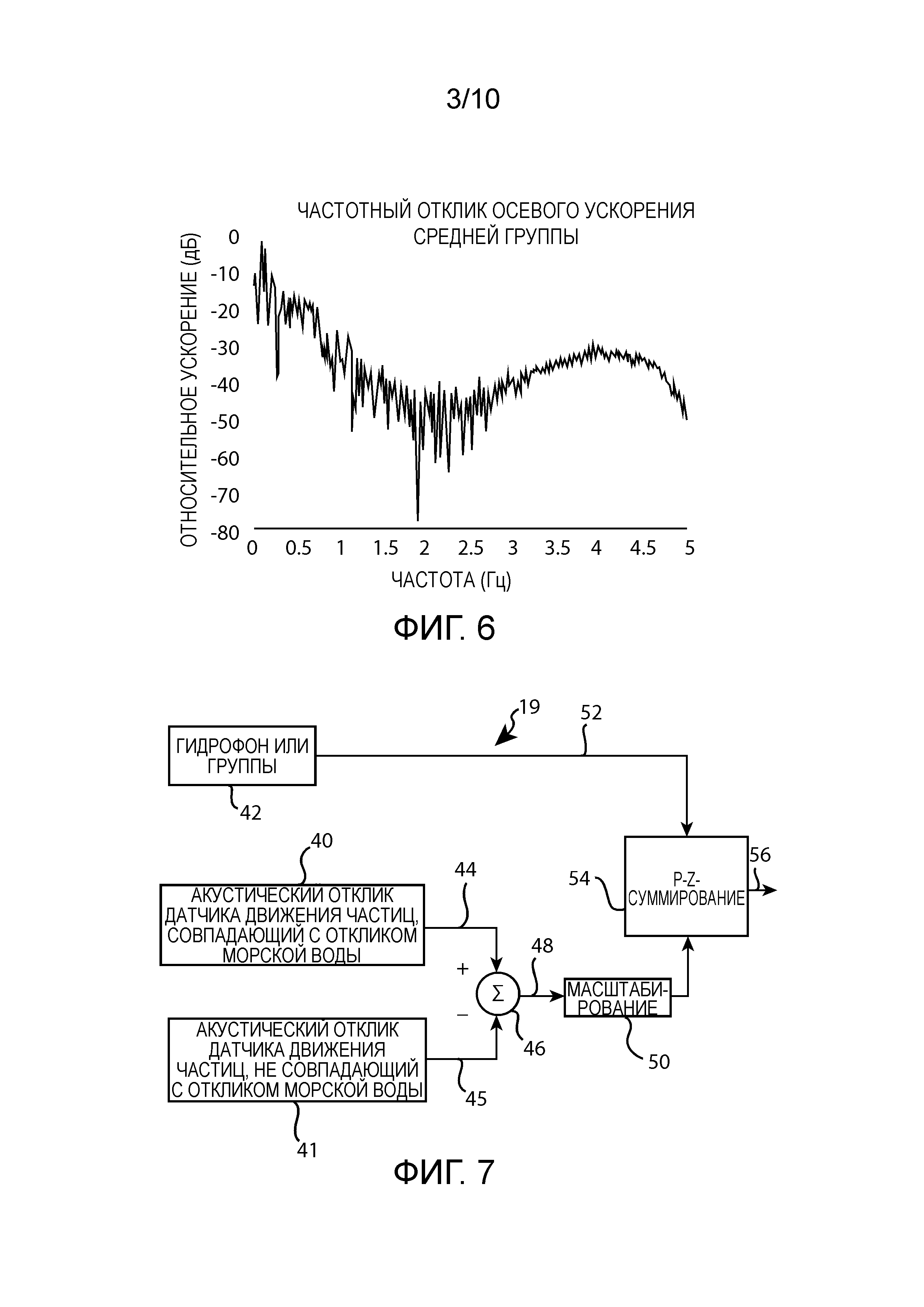
[19] фиг. 6 - расчетная модель частотного отклика типичных осевых ускорений кабеля в середине буксируемой косы;
[20] фиг. 7 - структурная схема общей версии подводной сейсмической системы, реализующей признаки изобретения;
[21] фиг. 8 - структурная схема двух датчиков перемещения из фиг. 7 в частотной области с показом их передаточных функций для составляющей акустической волны из падающей энергии;
[22] фиг. 9 - структурная схема двух датчиков перемещения из фиг. 7 в частотной области с показом их передаточных функций для составляющей перемещения платформы из падающей энергии;
[23] фиг. 10 - пример представления отклика во временной области первого датчика согласно варианту осуществления для падающей энергии, которая включает в себя как перемещение платформы, так и акустические волны;
[24] фиг. 11 - пример представления отклика во временной области второго датчика согласно варианту осуществления для падающей энергии, которая включает в себя как перемещение платформы, так и акустические волны;
[25] фиг. 12 - график результата объединения откликов двух датчиков согласно вариантам осуществления путем вычитания выходного сигнала второго датчика из выходного сигнала первого датчика для образования сигнала акустической волны с вычтенным шумом из фиг. 7;
[26] фиг. 13 - вид одной конкретной версии сейсмической системы из фиг. 7-9 с двумя датчиками перемещения, которые изолированы акустически центральным разделителем, и датчиком давления;
[27] фиг. 14А и 14В - виды другой версии сейсмической системы, реализующей изобретение, которая включает в себя два набора датчиков перемещения и датчик давления;
[28] фиг. 15 - еще один вид сейсмической системы, реализующей признаки изобретения;
[29] фиг. 16 - вид модифицированной версии сейсмической системы из фиг. 15, в которой предполагается повышение общего усиления системы;
[30] фиг. 17 - вид другого примера варианта осуществления сейсмической системы датчиков согласно варианту осуществления изобретения;
[31] фиг. 18 - вид узла датчика из варианта осуществления сейсмической системы, который может быть расположен в кабеле буксируемой косы или в устройстве управления положением кабеля;
[32] фиг. 19 - вид устройства управления положением кабеля, реализующего признаки изобретения, которое соединено в линию между передним и задним отрезками буксируемой косы, в котором может помещаться узел датчика сейсмической системы; и
[33] фиг. 20 - вид другого варианта осуществления, в котором сейсмическая система из фиг. 7 и/или 17 реализована в морской донной системе, например в морском донном кабеле, морском донном узле или в чем-либо подобном.
ПОДРОБНОЕ ОПИСАНИЕ
[34] Ниже делается обращение к вариантам осуществления изобретения. Однако следует понимать, что изобретение не ограничивается конкретными описанными вариантами осуществления. Вместо этого любое сочетание приведенных ниже признаков и элементов, независимо от того, относится оно к различным вариантам осуществления или нет, предполагается обеспечивающим выполнение и применение на практике изобретения. Кроме того, в различных вариантах осуществления изобретения представлены многочисленные преимущества относительно предшествующего уровня техники. Однако, хотя варианты осуществления изобретения могут обеспечивать преимущества относительно других возможных решений и/или относительно предшествующего уровня техники, конкретное преимущество, независимо от того, обеспечивается оно или нет данным вариантом осуществления, не является ограничивающим изобретение. Поэтому приведенные ниже аспекты, признаки, варианты осуществления и преимущества являются только иллюстративными и не считаются элементами или ограничениями прилагаемой формулы изобретении, за исключением случаев, когда на это ясно указывается в пункте (пунктах) формулы изобретения. Аналогично этому, упоминание изобретения не следует толковать как обобщение какого-либо предмета изобретения, раскрытого в этой заявке, и не следует считать элементом или ограничением прилагаемой формулы изобретения, за исключением случаев, когда на это ясно указывается в пункте (пунктах) формулы изобретения.
[35] На фиг. 1 показан пример сейсмических исследований согласно варианту осуществления изобретения. Как показано, сейсмическое судно 20 может буксировать один или несколько сейсмических кабелей 24 на или вблизи поверхности 22 моря. Один или несколько сейсмических источников 26, выполненных с возможностью периодического излучения акустической энергии, также могут буксироваться судном 20. Акустическая энергия, излучаемая источниками 26, может распространяться через водяной столб и направляться вниз к морскому дну 30. Часть акустической энергии может отражаться морским дном 30, а другая часть может проходить в нижележащие структуры под морским дном. Как показано на фиг. 1, нижележащие структуры, например структура 28 из фиг. 1, также могут отражать акустическую энергию обратно к поверхности 22 моря. Акустическая энергия, отражающаяся от морского дна и нижележащих структур, может захватываться одним или несколькими сейсмическими датчиками в одной или нескольких буксируемых косах 24.
[36] Как упоминалось ранее, несколько источников шума могут маскировать сигнал, принимаемый одним или несколькими сейсмическими датчиками в буксируемых косах 24. Типичный способ обращения с источниками шума заключается в использовании сочетания временной и пространственной фильтрации. Временную фильтрацию выполняют взятием дискретных цифровых выборок из сигналов гидрофонов во времени с использованием взвешивания, применяемого к выборкам. Кроме того, каналы гидрофонов включают в себя аналоговые фильтры для предотвращения наложения спектров сигналов на частотах, превышающих половину частоты взятия выборок. Пространственные выборки обычно формируют путем группового суммирования выходных сигналов отдельных гидрофонов, так что распространение шума давления по длине буксируемой косы ослабляется. Эти пространственные выборки не влияют на шум, который распространяется в направлении, ортогональном к оси буксируемой косы. Типичная группа гидрофонов состоит из восьми или около этого гидрофонов на 12-метровой секции буксируемой косы.
[37] Акустический импеданс ρс является произведением плотности и скорости звука в среде. Отражение по меньшей мере некоторого количества энергии звуковых волн происходит в случае, когда для звуковых волн неожиданно встречается изменение акустического импеданса. Энергия, которая не отражается, пропускается (преломляется) за границу между двумя областями с различными акустическими импедансами. Волны давления являются волнами сжатия, которые наводят движение частиц в направлении распространения.
[38] В этой заявке акустическая подвижность определяется как способность объекта точно следовать движению частиц среды, в которую он включен. На это свойство влияют несколько физических параметров, включая (но без ограничения ими) плотность и размер. В частности, объект, плотность которого находится в соответствии с плотностью его окружающей среды и которая является небольшой по отношению к длине волны движения частиц (в среде), будет перемещаться в среде с фазой и амплитудой, согласованными с фазой и амплитудой движения частиц (в среде). При повышенной плотности акустическая подвижность объекта будет снижаться, тогда как следствием пониженной плотности будет перемещение объекта с повышенной амплитудой по отношению к амплитуде движения частиц в среде. Объект релевантного размера, который является большим по сравнению с длиной акустической волны, также будет иметь пониженную акустическую подвижность.
[39] При плоской границе раздела между двумя различными однородными средами звуковая волна отражается под углом, равным углу θ1 падения, и преломляется под углом θ2. Угол преломления имеет вид:
θ2=sin-1(c2sinθ1/c1).
[40] Нижний индекс обозначает звуковую волну, движущуюся из среды 1 в среду 2, а с1 и с2 представляют собой скорости звука в каждой среде. Если угол θ1 падения равен нулю, траектория распространения преломленной энергии находится под нулевым углом θ2.
[41] При нулевом угле θ1 падения и отсутствии энергии, преобразуемой в энергию сдвиговых волн, коэффициент отражения на границе раздела вода-воздух описывается как:
Rρρ=(ρ2⋅c2-ρ1⋅c1)/(ρ2⋅c2+ρ1⋅c1)≈-1.
[42] Отраженная энергия на границе раздела вода-воздух равна R2ρρ или приблизительно 1, что делает поверхность моря почти идеальным отражателем звуковой энергии. После возвращения от морского дна или представляющего интерес объекта исследований энергия опять отражается поверхностью моря обратно к буксируемой косе. Поскольку типичный гидрофон имеет всенаправленный отклик, группой гидрофонов также регистрируется сигнал волны-спутника, который представляет собой сейсмический акустический импульс, отраженный от поверхности моря и приходящий задержанным во времени и в обратной полярности. Волна-спутник представляет собой нисходящую сейсмическую акустическую волну, которая при добавлении к желаемой волне вычитается из регистрируемого сейсмического изображения. Кроме того, создаваемое волной-спутником отражение может продолжаться к морскому дну или другому сильному отражателю и отражаться обратно, чтобы опять взаимодействовать с желаемыми отражениями и дополнительно ухудшать изображение. Эти отражения обычно называют многократными волнами.
[43] В случае вертикально распространяющейся волны давления волна-спутник создает вырез в частотном спектре отклика гидрофона на fвыреза=c/(2d), где с является скоростью звука и d является глубиной погружения буксируемой косы. Сейсмические буксируемые косы обычно буксируют на глубине 10 м или меньше. На глубине 10 м частота выреза (fвыреза) составляет 75 Гц. Для высокого разрешения сейсмического изображения требуется продолжение частотного отклика за пределы 100 Гц. Поскольку частота выреза обратно пропорциональна глубине буксирования, для повышения разрешения сейсмического изображения буксируемые косы часто буксируют на меньших глубинах. Буксирование на небольших глубинах является проблематичным, поскольку шум с поверхности моря начинает взаимодействовать с желаемыми сейсмическими сигналами. Эти явления усиливаются по мере ухудшения погоды, иногда сейсмической партии приходится прерывать работы до улучшения погоды. Исключение воздействий волн-спутников позволит осуществлять буксирование на больших глубинах, дальше от поверхностных возмущений.
[44] В морских донных системах, в которых сейсмические датчики расположены на морском дне, волны-спутники и многократные волны подавляют способом, обычно известным как p-z-суммирование. В акустической волне давление p является скалярной величиной, а скорость u частиц является вектором. Гидрофоном с положительным всенаправленным откликом регистрируют давление p сейсмических акустических волн. Вертикально ориентированным геофоном или акселерометром регистрируют вертикальную составляющую uz скорости частиц сейсмических акустических волн, при этом используют положительный отклик для восходящих сигналов и отрицательный отклик для нисходящих сигналов. При p-z-суммировании сигнал скорости масштабируют в соответствии с акустическим импедансом ρс морской воды до добавления его к сигналу давления. Если используют акселерометр, его выходной сигнал можно интегрировать для получения сигнала скорости, или сигнал гидрофона можно дифференцировать, чтобы он мог быть лучше спектрально согласован с акселерометром. Этим сочетанием сигналов обеспечивается составной датчик, который для подавления волн-спутников и многократных волн имеет полный отклик для восходящей волны и, по меньшей мере частично, обнуленный отклик для нисходящей волны. Один такой способ согласования и сочетания сигналов для получения одной трассы с подавленными волнами-спутниками описан в патенте США № 6539308 (Monk et al.). На фиг. 2 представлено двумерное (2М) отображение отклика датчика скорости частиц. На фиг. 3 представлено двумерное отображение отклика всенаправленного гидрофона, суммированного с откликом вертикального датчика движения частиц. Полные трехмерные отклики могут быть представлены путем поворота двумерных откликов вокруг вертикальных осей.
[45] В последнее время проявляется интерес к использованию способов, подобных p-z-суммированию, при морских сейсмических исследованиях с буксируемыми косами, чтобы иметь возможность осуществлять буксирование на большей глубине без помехи со стороны паразитных отражений, приводящих к вырезам в частотном спектре. Работа датчика движения частиц в сейсмической буксируемой косе представляет проблему, поскольку буксируемая коса подвергается воздействию ускорений вследствие буксирования или эффектов поверхности моря, которые являются значительными по сравнению с ускорениями, создаваемыми желаемыми сейсмическими отражениями. Кроме того, эти нежелательные ускорения находятся в том же спектральном диапазоне, что и желаемый сейсмический отклик. Когда буксирующее судно сталкивается с морскими волнами, возникают небольшие возмущения скорости судна. Кроме того, судно обычно испытывает рыскание. На фиг. 4 показана энергия, сообщаемая буксируемым косам 24 при изменениях 32 скорости и рыскании 34. На фиг. 5 представлен вид сбоку, показывающий наведенные энергией ускорения и поперечные волны в буксируемой косе 24. (Для наглядности на фиг. 5 влияние энергии на буксируемую косу преувеличено.) Большая часть энергии ослабляется упругими растягивающимися элементами 36, обычно находящимися перед чувствительными группами. Хотя энергия сильно ослабляется, некоторое количество остается. Ускорения, создаваемые плоскими волнами давления, обусловленными желаемыми сейсмическими отражениями, имеют вид:
a=p⋅2⋅π⋅f/Z,
где p - амплитуда акустического давления, f - частота и Z - акустический импеданс. Характеристика системы измерения скорости частиц должна быть вблизи пределов окружающего шума. Обычно заказчики сейсмических данных требуют, чтобы окружающий шум от систем гидрофонов буксируемых кос был ниже 3 мкбар (0,3 Па). Поскольку акустический импеданс морской воды составляет 1,5 МПа*с/м, 3-микробарная волна давления при 4 Гц создает ускорения частиц приблизительно равные 0,5 μg (4,9×10-6 м/с2). На фиг. 6 показана расчетная модель частотного отклика типичных осевых ускорений кабеля в середине буксируемой косы. Наличие вторичного пика на 4 Гц, только на 1,5 порядка меньшего по величине, чем первичный пик, означает, что в некоторых случаях динамическое перемещение кабеля может быть больше, чем измеряемый сейсмический сигнал.
[46] В патенте США № 7167413 (Rouquette) акселерометр в сейсмической буксируемой косе используется для подавления эффекта выреза в частотном спектре, вызванного волной-спутником. Rouquette использует систему масса-пружина для снижения влияния динамики кабеля на акселерометр и систему нагрузка-элемент для измерения и исключения шума, наводимого на акселерометр перемещением кабеля. Система Rouquette основана на хорошо известных сложных механических зависимостях, которые не сохраняются постоянными при изменении производственных допусков, старении и изменении окружающих условий. Rouquette использует адаптивный алгоритм обработки сигналов для получения связи систем нагрузка-элемент-датчик и масса-пружина с ускорением, действующим на акселерометр на месте нахождения. Rouquette описывает сложную механическую и электронную систему.
[47] В патенте США № 7239577 (Tenghamn et al.) описаны устройство и способ для исключения выреза в частотном спектре, вызванного волной-спутником, с использованием датчика скорости частиц акустической волны. Tenghamn и соавторы предложили использовать геофон с жидкостным демпфированием на карданном подвесе. Из уровня техники известно, что жидкость, покрывающую геофон, выбирают из условия демпфирования качания датчиков на их карданных подвесах. Хотя это не описано в патенте Tenghamn и соавторов, из уровня техники известно, что изолирующая вибрации система масса-пружина может уменьшать влияние механического перемещения кабеля на сигнал геофона. В сигнале геофона перемещение геофона, вызванное механическим перемещением кабеля, неотличимо от движения частиц акустической волны. Хотя при использовании способа Tenghamn и соавторов снижается действие шума этого вида, это снижение является недостаточным для полного предотвращения маскирования движения частиц сейсмической волны механическим перемещением кабеля. Этот способ также приводит к получению отклика, подобного идеальной кардиоиде на фиг. 3, но все же будут нежелательные сигналы, приходящие с поверхности и наводимые при возбуждении буксируемой косы вдоль оси буксируемой косы.
[48] В патенте США № 7359283 (Vaage et al.) описан способ объединения датчиков давления и датчиков движения частиц для решения проблемы влияния механического перемещения на датчики движения частиц. В этом способе сигнал датчика движения частиц ниже определенной частоты не используют, а оценку выполняют только по сигналу датчика давления и известной глубине погружения датчика давления. Исключают те частоты, на которых предполагается механическое перемещение буксируемой косы. Оцениваемый сигнал имеет плохое отношение сигнала к шуму на представляющих интерес низких частотах. Это исключение ниже определенной частоты не является оптимальным, поскольку также исключаются полезные сигналы в важном низкочастотном диапазоне, в котором, вероятно, имеются данные о глубокозалегающем объекте исследований.
[49] Хотя во всех этих патентах описаны способы исключения вызванного волной-спутником выреза в отклике буксируемой косы, отсутствуют адекватные решения проблем влияния шума буксирования буксируемой косы и других шумов, воздействующих на датчик движения частиц или влияющих на измерения гидрофонами. Кроме того, не решается задача получения высококачественных чувствительных составляющих акустических волн с хорошим отношением сигнала к шуму вплоть до представляющих интерес самых низких частот.
[50] На фиг. 7 представлена структурная схема общей версии подводной сейсмической системы 19, реализующей признаки изобретения, которая охватывает технологии использования датчиков движения или узлов датчиков с различными откликами для наведенных звуковой волной сигналов или подобными откликами для перемещения платформы, например буксируемой косы, кабеля или автономного узла, для повышения отношения сигнала к шуму данных, регистрируемых для построения сейсмического изображения. На фиг. 7 два датчика 40, 41 перемещения и один датчик 42 давления, обычно гидрофон, образуют сигналы, которые объединяются для получения сигнала со сниженным шумом и подавленной волной-спутником. Группу датчиков давления можно использовать вместо одного датчика, например, для снижения шума, возникающего в результате действия волн давления, распространяющихся вдоль оси буксируемой косы. В идеальном случае датчики перемещения являются чувствительными к постоянной составляющей и способными разрешать вектор ускорения силы тяжести; в противном случае используется дополнительный датчик ориентации.
[51] Первый датчик 40 перемещения имеет отклик для акустических волн, который в идеальном случае, но не обязательно, совпадает с откликом морской воды; его отклик может быть расширен за пределы отклик морской воды, если желательно большее усиление. Второй датчик 41 перемещения имеет отклик для акустических волн, которая заметно отличается от отклика первого датчика 40 перемещения. Это отличие акустического отклика может быть реализовано за счет различия составов материалов или геометрических конфигураций датчиков. Во всех версиях системы конструкция (материал и геометрические свойства) и реализация обоих датчиков выбраны так, что их механические характеристики для перемещения платформы являются согласованными. Например, если каждый датчик перемещения предназначен для взаимодействия с кабелем таким же образом, как система масса-пружина второго порядка, то массы (включая добавленную массу, в случае необходимости) датчиков и их связанные пружины и постоянные демпфирования делают совпадающими. В ином случае алгоритмы локальной или дистанционной обработки могут использоваться для математического согласования откликов датчиков с перемещением платформы. Примеры способов согласования откликов датчиков с перемещением платформы описаны в совместно рассматриваемой заявке № 61/785354 на патент США, поданной 14 марта 2013 года под названием “Seismic Sensor System with Streamer Noise Rejection”, которая полностью включена в эту заявку.
[52] Первый и второй выходные сигналы 44, 45 первого и второго датчиков 40, 41 перемещения вычитаются 46, или локально, или после дистанционной обработки, для образования сигнала 48 отклики со сниженным шумом, показывающего движение частиц, обусловленное акустическими волнами, с ослабленным перемещением платформы. Блок 46 вычитания образует одно средство для объединения сигнала первого датчика и сигнала второго датчика. В отличие от этого, если сигнал одного из датчиков имеет противоположную фазу, средство для объединения сигнала первого датчика и сигнала второго датчика следует реализовывать в виде блока суммирования. Отклики со сниженным шумом масштабируется 50 для согласования с откликом 52 датчика давления, например, с сигналом гидрофона, и используется в средстве 54 p-z-суммирования для образования конечного выходного сигнала 56, из которого к тому же исключены вырезы в частотном спектре, обусловленные волной-спутником, и многократные волны. Средство для объединения сигнала первого датчика и сигнала второго датчика и средство p-z-суммирования могут быть реализованы локально аналоговыми схемами, цифровыми логическими схемами или алгоритмически в микропроцессоре, дистанционно в судовом компьютере или при автономной обработке данных.
[53] На фиг. 8 представлена структурная схема двух датчиков 40, 41 перемещения из фиг. 7 в частотной области с показом их передаточных функций для составляющей 58 акустической волны падающей энергии. Составляющая акустической волны включает в себя представляющие интерес сейсмические сигналы. Первый датчик 40 и второй датчик 41 имеют неодинаковые передаточные функции H1(s) и H2(s) акустической волны. Передаточная функция H1(s) чувствительна к движению частиц акустической волны, так что первый датчик 40 создает выходной сигнал O1(s), который отображает движение частиц. Передаточная функция H2(s) нечувствительна к движению частиц акустической волны, и второй датчик 41 создает выходной сигнал O2(s), который не включает в себя движения частиц в окружающей акустической среде. На фиг. 9 представлена структурная схема двух датчиков 40, 41 перемещения из фиг. 7 в частотной области с показом их передаточных функций для составляющей 59 перемещения платформы в падающей энергии. Передаточные функции H3(s) и H4(s) двух датчиков 40, 41 перемещения платформы имеют пропорциональные (или равные) величины, но могут иметь противоположные фазы. Таким образом, оба датчика 40, 41 имеют подобные выходные сигналы O3(s) и O4(s) перемещения платформы. Составные передаточные функции первого и второго датчиков 40, 41 перемещения для падающей энергии представляют собой сочетания H1(s) и H3(s) для первого датчика и H2(s) и H4(s) для второго датчика. Составные сигналы двух датчиков представляют собой сочетания O1(s) и O3(s) для первого датчика перемещения и O2(s) и O4(s) для второго датчика перемещения.
[54] На фиг. 10 представлен пример отображения отклика во временной области первого датчика 40 для падающей энергии, которая включает в себя как перемещение платформы, так и акустические волны. Отклик 44 первого датчика чувствительна как к шуму платформы, так и к акустической волне. На фиг. 11 представлен соответствующий отклик второго датчика 41 для такой же падающей энергии. Отклик 45 второго датчика чувствителен только к составляющей шума платформы из падающей энергии. На фиг. 12 представлен графически результат сочетания откликов двух датчиков путем вычитания выходного сигнала 45 второго датчика из выходного сигнала 44 первого датчика для образования сигнала 48 акустической волны с вычтенным шумом из фиг. 7. Хотя ради упрощения описания отклика второго датчика для волн давления рассматривалась как нулевая, можно иметь до некоторой степени слабый отклик или даже отрицательный отклик для волн давления. Кроме того, выходные сигналы первого и второго датчиков могут неточно соответствовать вибрациям буксируемой косы. Но даже в этих случаях вычитание сигнала все же приводит к сигналу акустической волны с сильно ослабленным сигналом перемещения платформы, который можно масштабировать и сочетать с данными гидрофона путем p-z-суммирования.
[55] В различных конкретных версиях общей системы, показанных на структурных схемах из фиг. 7-9, использованы различные уровни акустического импеданса и акустической подвижности для получения заданного различия в ответ на акустические сейсмические импульсы. Как описывалось выше, два датчика 40, 41 перемещения и датчик 42 давления закреплены в, на платформе или прикреплены к ней. Например, их можно заключить в подводную буксируемую косу или установить внутрь регулятора положения кабеля, прикрепленного к буксируемой косе. Датчики перемещения акустически изолированы друг от друга, но расположены близко друг к другу и изолированы в отдельных областях, например, разделителем. Первый датчик перемещения заключен в первой области, при этом внешняя поверхность его свободно перемещается, а акустический импеданс подобен акустическому импедансу окружающей морской воды, так что волны акустического давления и движения частиц проникают через внешнюю поверхность с минимальными отражениями и воздействуют на датчик. Второй датчик перемещения расположен в акустически непрозрачном и жестком корпусе во второй области и не подвергается воздействию падающих акустических волн. Элемент напряжения или элементы напряжения, находящиеся под растягивающим напряжением, могут обладать слабой и изменчивой реакцией на акустические волны. Любая реакция элемента (элементов) напряжения буксируемой косы на акустические волны регистрируется как перемещение платформы. Поэтому первый датчик имеет пропорциональный отклик для акустических волн; и второй датчик имеет не принимаемый в расчет отклик. В дополнение к этому узлы датчиков калибруют, чтобы иметь отклики, согласованные с перемещениями платформы (например, с вибрациями буксируемой косы), например, путем выравнивания их масс (с включением добавленной массы, если это необходимо) и связанных с ними постоянных упругости пружин, если они ведут себя как системы масса-пружина второго порядка. Соответственно, вычитание, либо локальное, либо после дистанционной обработки, сигнала второго датчика из сигнала первого датчика дает желаемый сигнал акустической волны с почти полной интенсивностью и с сильно ослабленным откликом на перемещение буксируемой косы. В дополнение к этому узлы датчиков калибруют, чтобы иметь отклики, согласованные с перемещениями платформы (например, с вибрациями буксируемой косы), например, путем выравнивания их масс (с включением добавленной массы, если это необходимо) и связанных с ними постоянных упругости пружин, если они ведут себя как системы масса-пружина второго порядка. В ином случае алгоритмы локальной или дистанционной обработки могут использоваться для математического согласования откликов датчиков с перемещением платформы.
[56] Одна конкретная версия сейсмической системы из фиг. 7-9 с двумя датчиками 60, 61 перемещения, акустически отделенными центральным разделителем 64, и датчиком 62 давления показана на фиг. 13. Первый датчик 60 перемещения содержится в первой области 66 сейсмической платформы (такой как буксируемая коса, кабель или узел) с жесткой, акустически прозрачной внешней поверхностью 68. Например, внешняя поверхность 68 является перфорированным жестким корпусом, покрытым гибкой акустически прозрачной оболочкой 70. При необходимости перфорации могут быть выполнены определенного размера. Внутренняя часть первой области 66 заполнена жидкостью. В идеальном случае как оболочка, так и жидкость, имеют акустический импеданс, равный акустическому импедансу окружающей морской воды. Первая тестовая масса 72 с акустическим откликом в идеальном случае равным, но это необязательно, акустическому отклику жидкости, находится в подвешенном состоянии в жидкости; если требуется большее усиление, ее отклик может быть продолжен за пределы отклика морской воды. Первая тестовая масса 72 связана с внешней поверхностью буксируемой косы через посредство датчика смещения, скорости или ускорения, который используется в качестве датчика перемещения. Внешняя поверхность буксируемой косы используется как система отсчета для первого датчика 60, а датчик действует динамически как пружина во взаимосвязи с тестовой массой и буксируемой косой. Первый датчик может быть, например, монокристаллом или работающим на изгиб преобразователем из цирконата-титаната свинца. Если датчик является однокомпонентным датчиком, многочисленные системы тестовой массы можно использовать для образования трехкомпонентного датчика, при этом все тестовые массы калибруют для согласования с акустическими и динамическими откликами. Альтернативой многокомпонентному измерению является связывание нескольких датчиков с общей тестовой массой для многокомпонентного измерения, поскольку отклики датчиков массы могут поддерживаться независимыми. Второй датчик 61 и вторая тестовая масса 73 связаны в узел во второй области 67 на противоположной стороне разделителя относительно первой области 66. Второй узел датчика отличается от первого узла датчика тем, что его внешняя поверхность 69 жесткого корпуса имеет намного больший акустический импеданс по сравнению с акустическим импедансом окружающей морской воды, а его внутренняя часть 67 заполнена воздухом для учета любой заметной упругости внешней поверхности 69 корпуса. Дополняющим полезным действием повышенного акустического импеданса корпуса второго датчика является жесткость, которая позволяет корпусу действовать в качестве акустического экрана, аналогичного клетке Фарадея в электромагнетизме. Акустический импеданс второй внешней поверхности 69 корпуса определяется материалом, имеющим подходящую высокую плотность или скорость звука. Тестовую массу, постоянную упругости пружины и коэффициент демпфирования можно согласовывать как механически, так и математически.
[57] Другая версия сейсмической системы, реализующей изобретение, с двумя наборами 80, 81 датчиков перемещения и датчиком давления 82 показана на фиг. 14А и 14В. В этой версии первый набор 80 датчиков и второй набор 81 датчиков связаны с одним жестким телом 84, которое испытывает вибрации. Это жесткое тело может быть, например, частью буксируемой косы, кабеля или узла. Жесткое тело имеет первый участок 86 большого диаметра, второй участок 87 меньшего диаметра и переходную секцию 88, соединяющую первый и второй участки. Участок 87 меньшего диаметра является трубчатым по форме с внутренней стороной 83 и внешней стороной 85. Первый набор 80 датчиков окружает секцию второго участка 87 жесткого тела 84 и связан с его внешней стороной 85. Три или большее количество отдельных датчиков можно использовать для образования первого набора 80. В отличие от этого, если осевую симметрию не используют, то первый набор 80 датчиков располагают сбоку от жесткого тела. Акустически прозрачная внешняя поверхность 90, которая может состоять из гибкой мембраны поверх перфорированного жесткого корпуса (при необходимости с выдержанными по размеру перфорациями), отделяет систему датчиков от окружающей морской воды. Первая полость 92 между вторым участком 87 жесткого тела 84 и внешней поверхностью 90 заполнена жидкостью. В идеальном случае внешняя поверхность 90 и жидкость имеют акустические импедансы, равные акустическому импедансу окружающей морской воды. Первая тестовая масса 94 с акустическими свойствами, подобными акустическим свойствам первой тестовой массы из фиг. 13, подвешена в первой полости 92 и окружена вторым участком 87 жесткого тела 84. Первая тестовая масса 94 механически связана с внешней стороной 85 жесткого тела 84 с помощью первого набора 80 датчиков перемещения со свойствами, подобными свойствам первого датчика 60 в версии из фиг. 13, но с жестким телом 84 в качестве их системы отсчета. Вторая полость 93 полностью содержится на трубчатом втором участке 87 жесткого тела 84. Вторая полость 93 содержит вторую тестовую массу 95, подвешенную в жидкости и связанную с жестким телом 84 с помощью второго набора 81 датчиков перемещения, связанных с внутренней стороной 83 жесткого тела. Динамический отклик второго набора 81 датчиков калибруют, чтобы иметь отклик для вибраций буксируемой косы, который согласован с откликом первого набора 80. Однако в отличие от первой тестовой массы 94 не накладываются требования на акустический отклик второй тестовой массы 95. Само жесткое тело 84 действует как акустический экран для второго набора 81 датчиков и образовано из материала с относительно высоким акустическим импедансом. Преимущество этой коаксиальной компоновки заключается в том, что многочисленные отдельные датчики реагируют на ускорение каждой тестовой массы. Объединение выходных сигналов датчиков перемещения приводит к получению более робастной оценки фактических значений ускорения. Как показано, первый и второй наборы 80, 81 датчиков являются чувствительными к радиальному перемещению; если необходима чувствительность по трем осям, дополнительная система тестовая масса-датчик может быть включена в каждую полость на одной прямой с осью буксируемой косы.
[58] Еще одна версия сейсмической системы показана на фиг. 15. Сейсмическая платформа с жесткой акустически прозрачной внешней поверхностью 98 имеет два датчика 100, 101 перемещения, таких как чувствительные к постоянной составляющей трехкомпонентные акселерометры, и один датчик 102 давления, такой как гидрофон. Внешняя поверхность 98 может содержать, например, перфорированный жесткий корпус, покрытый гибкой акустически прозрачной оболочкой. При необходимости перфорации могут быть выдержанными по размерам. Акселерометры могут быть реализованы на основе микроэлектромеханической системы (МЭМС), цирконата-титаната свинца, монокристалла или по любой другой технологии с аналогичной эффективностью. Датчики 100, 101 перемещения жестко закреплены в первом и втором жестких корпусах 104, 105 для обеспечения возможности непосредственного измерения любого динамического перемещения буксируемой косы. Оба датчика акустически связаны с внешней поверхностью 98 кабеля, но акустически изолированы друг от друга, например, центральным разделителем 106. Каждый из первого и второго корпусов 104, 105 выполнен таким образом, что масса первого корпуса с добавлением массы, которую он окружает, равна массе второго корпуса с добавлением массы, которую он окружает. Динамические связи 106 между корпусами и внешней поверхностью 98 буксируемой косы выполнены так, что действуют как системы масса-пружина второго порядка с совпадающими постоянными упругости пружины и демпфирования, вследствие чего сохраняется равенство связей масса-пружина. С другой стороны, корпусы имеют различные уровни акустической подвижности, так что они образуют различные отклики на акустические волны давления. В частности, первый датчик 100 образует сигнал 108 первого датчика, который является хорошим представлением движения частиц акустической волны; второй датчик 101 образует сигнал 109 второго датчика, который в значительной степени нечувствителен к акустическим волнам. Корпусы датчиков выполнены имеющими различные геометрии и, возможно, также из различных материалов для гарантии различных поперечных сечений и тем самым различных переходных функций датчиков. Сигнал 109 второго датчика вычитается 107 из сигнала 108 первого датчика локально или после дистанционной обработки для получения желаемого сигнала волны давления при сильно ослабленном сигнале перемещения буксируемой косы. Например, пенопласт с открытыми порами можно использовать в качестве динамического соединения 106 между каждым корпусом 104, 105 и внешней поверхностью 98. Кроме того, пенопласт, наполненный жидкостью, калиброванной для согласования с акустическим импедансом окружающей морской воды, может использоваться в качестве прозрачного акустического связующего средства. В случае объектов, которые являются большими по сравнению с представляющими интерес длинами волн, акустическое поперечное сечение можно соотносить с формой и размером, поскольку эти свойства сами по себе являются достаточными для гарантии отличия откликов датчика. В случае небольших объектов отличие акустического поперечного сечения, вероятно, будет включать в себя отличие плотности. В этом примере первый корпус 104 герметизирован относительно жидкости и заполнен воздухом для учета любой заметной упругости в корпусе; а второй корпус 105 перфорирован или снабжен щелями и может быть заполнен окружающей жидкостью. Результирующим несоответствием общих плотностей между корпусами объясняются их различные отклики для падающих волн давления.
[59] Модифицированная версия сейсмической системы из фиг. 15, предназначенной для повышения общего усиления системы, показана на фиг. 16. Первый датчик 110 реагирует акустически и динамически аналогично первому датчику 100 из фиг. 15. Второй датчик 111 создает отклик на волны давления, который соответствует отклику первого датчика 110, а отклик его для перемещения буксируемой косы равен по величине, но противоположен по полярности отклику первого датчика. Первый корпус 114 и второй корпус 115 выполнены так же, как на фиг. 15, особенно в части акустического поперечного сечения и плотности, так что они имеют подобный отклик массы-пружины на перемещение кабеля, но в известной мере иной отклик на падающие акустические волны давления. Второй корпус 115 дополнительно включает в себя тестовую массу 116, которая предназначена для совершения колебаний в жидкости и имеет отклик на акустическую волну, согласованную с откликом первого корпуса 114. С другой стороны, отклик тестовой массы на перемещение буксируемой среды намного слабее, чем отклик корпусов, поскольку тестовая масса изолирована от корпуса второй пружинной системой. Тестовая масса 116 не жестко связана с вторым корпусом 115 с помощью датчика 111 смещения, перемещения или ускорения, для которого второй корпус используется как система отсчета. Для ослабления отклика на перемещение платформы эта связь должна иметь более низкую резонансную частоту по сравнению с пиковыми частотами перемещения буксируемой косы. Для образования трехкомпонентного датчика можно использовать многочисленные акселерометры, при этом каждую тестовую массу калибруют для согласования с акустическим откликом первого корпуса 114 по его соответствующей оси. Поэтому волны давления, которые придают перемещение тестовой массе 116, но не второму корпусу 115, обнаруживаются положительно, то есть в фазе. Таким образом, акустические сигналы движения частиц от первого датчика 110 и второго датчика 111 согласованы как по амплитуде, так и по знаку. И наоборот, вибрации буксируемой косы, которые воздействуют на второй корпус 115, но в меньшей степени на тестовую массу 116, обнаруживаются отрицательно, то есть противоположными по фазе. Таким образом, сигналы вибрации с датчиков согласованы по амплитуде, но имеют противоположные знаки. В этом случае сигналы с двух датчиков 110, 111 объединяют путем суммирования 118, а не вычитания, чтобы получить сильно ослабленный отклик для перемещения буксируемой косы и одновременно улучшить отклик для акустической волны. В ином случае можно использовать другую тестовую массу в первом корпусе 114. Но поскольку сигнал первого датчика также будет с обратной полярностью, необходимо выполнять объединение с сигналом второго датчика вычитанием, а не суммированием.
[60] На фиг. 17 показан еще один пример сейсмической системы датчиков согласно варианту осуществления изобретения. В частности, датчик 1710 шума буксируемой косы и датчик 1720 движения частиц показаны в оболочке 1730 буксируемой косы. В одном варианте осуществления оболочка буксируемой косы может быть изготовлена из акустически прозрачного материала. Примеры акустически прозрачных материалов включают в себя полиуретаны, наряду с некоторыми другими. В более общем смысле, акустически прозрачные материалы могут включать в себя любой материал, который обеспечивает прохождение сейсмических акустических волн с минимальным изменением волн.
[61] В одном варианте осуществления датчик 1710 шума буксируемой косы и датчик 1720 движения частиц могут соответствовать датчикам 41 и 40, соответственно, показанным на фиг. 7. Иначе говоря, датчик 1710 шума буксируемой косы выполняется с возможностью измерения, либо непосредственно, либо косвенно, перемещения (или шума) сейсмической буксируемой косы, тогда как датчик 1720 движения частиц выполняется с возможностью измерения, либо непосредственно, либо косвенно, движения частиц в морской воде на буксируемой косе или вблизи нее. В одном варианте осуществления изобретения как датчик 1710 шума буксируемой косы, так и датчик 1720 движения частиц, могут быть инерциальными датчиками, выполненными с возможностью измерения одного или нескольких из ускорения, наклона, удара, вибрации, поворота при многочисленных степенях свободы.
[62] Датчик 1710 перемещения буксируемой косы может быть высококачественным датчиком. Иначе говоря, датчик 1710 перемещения буксируемой косы выполняется с возможностью измерения перемещения буксируемой косы при полном или по меньшей мере по существу исключении любого измерения движения частиц на датчике 1710 буксируемой косы или вблизи него, вызываемого сейсмическими акустическими волнами. В одном варианте осуществления датчик 1710 может быть непосредственно или косвенно связан с по меньшей мере одним элементом напряжения кабеля буксируемой косы. Например, как показано на фиг. 17, датчик 1710 (или корпус, содержащий датчик 1710) может быть встроен в монтажную опору 1711 датчика. Монтажная опора 1711 датчика может быть изготовлена из жесткого материала любого вида, например, пластика, смолы, металла или чего-либо подобного. Как показано на фиг. 17, монтажная опора 1711 датчика может быть жестко соединена с по меньшей мере одним из элементов 1712 и/или 1713 напряжения или с обоими. Поэтому перемещение элементов 1712 и 1713 напряжения может передаваться к датчику 1710 (и тем самым измеряться им). Хотя на фиг. 17 показаны два элемента 1712 и 1713 напряжения, в альтернативных вариантах осуществления в сейсмический кабель могут быть включены элементы напряжения в любом количестве. Корпус датчика 1710 и/или монтажная опора 1711, содержащая датчик 1710, могут быть соединены с любым одним или несколькими из доступных элементов напряжения.
[63] В одном варианте осуществления изобретения корпус датчика 1710 при желании может быть помещен в область с границами, ослабляющими давление и движение частиц, например, в воздушную камеру 1714, показанную на фиг. 17. Воздушная камера 1714 может создавать для датчика 1710 шума дополнительный слой изоляции от движения частиц, связанного с отраженными сейсмическими/акустическими волнами. Когда воздушная камера 1714 используется, воздушная камера может быть встроена в монтажную опору 1711 датчика, соединенную с одним или несколькими элементами напряжения. В ином случае воздушная камера 1714, содержащая датчик 1710 шума, может быть непосредственно соединена с элементами напряжения.
[64] В одном варианте осуществления изобретения датчик 1710 может быть развязан от оболочки 1730 буксируемой косы. Например, что касается фиг. 17, то монтажная опора 1711 датчика показана как не находящаяся в контакте с оболочкой 1730 буксируемой косы. Это можно осуществить, например, подвешиванием монтажной опоры датчика и датчика в заполняющей жидкости, которая имеет такой же удельный вес, как и морская вода, вследствие чего датчик и/или монтажная опора датчика плавает внутри буксируемой косы. В варианте осуществления из фиг. 17 датчик и монтажная опора датчика показаны жестко прикрепленными к элементам напряжения. Поскольку элементы напряжения работают на растяжение при буксировании, они могут стремиться оставаться неподвижными относительно перемещения окружающей среды. С другой стороны, оболочка буксируемой косы и заполняющий материал, имеющие нейтральную плавучесть и не прикрепленные к элементам напряжения вблизи датчика и монтажной опоры, могут свободно перемещаться вместе с перемещением окружающей среды. В одном варианте осуществления внешний размер монтажной опоры относительно внутреннего размера оболочки буксируемой косы и относительно ожидаемой величины смещения оболочки буксируемой косы выбран таким, что контакт оболочки и монтажной опоры датчика по существу исключается. Благодаря тому, что корпус датчика 1710, монтажная опора 1711 и/или воздушная камера 1714 не находятся в контакте с оболочкой буксируемой косы, которая может передавать акустическую энергию, в вариантах осуществления изобретения дополнительно повышается достоверность данных датчика 1710 шума благодаря исключению акустической энергии от поступающих сейсмических волн.
[65] Датчик 1720 может быть выполнен с возможностью измерения, либо непосредственно, либо косвенно, движения частиц, связанного с сейсмическими/акустическими волнами. Как показано на фиг. 17, в одном варианте осуществления корпус 1720 датчика может быть помещен в монтажную опору 1721 датчика. Монтажная опора 1721 датчика может быть изготовлена из такого же материала, что и монтажная опора 1711 датчика, например из пластика, смолы и т.д. В альтернативных вариантах осуществления монтажная опора датчика может быть исключена. В любом случае датчик 1720 может быть непосредственно или косвенно (например, через посредство монтажной опоры 1721 датчика) связан с оболочкой 1730 буксируемой косы. Как будет описано более подробно ниже, при допущении связи датчика 1720 с оболочкой буксируемой косы движение частиц, связанное с сейсмическими акустическими волнами, может передаваться к датчику 1720 через посредство оболочки буксируемой косы.
[66] В одном варианте осуществления датчик 1720 может быть помещен между парой разделительных элементов 1741 и 1742. Разделительными элементами может задаваться отрезок 1731 оболочки 1730 буксируемой косы, имеющий отношение к датчику 1720. Разделительные элементы могут быть изготовлены из любых подходящих материалов, включая металлы, пластики, смолу и т.п. В одном варианте осуществления разделительные элементы 1741 и 1742 могут быть прижаты к оболочке буксируемой косы при использовании внешних колец или путем выбора диаметров такими, при которых гарантируется взаимодействие разделительного элемента и оболочки. Пространственное разнесение точек прижатия выбирают с тем, чтобы настроить резонансную частоту отрезка 1731 оболочки 1730 буксируемой косы и гарантировать акустическую подвижность датчика 1720.
[67] В частности, в одном варианте осуществления отрезок 1731 может быть выбран так, чтобы резонансные частоты для отрезка 1731 оболочки 1730 буксируемой косы были согласованы с частотами, связанными с ожидаемыми сейсмическими акустическими волнами, подлежащими измерению датчиком 1720. Резонансные частоты отрезка 1731 буксируемой косы могут быть связаны с длиной отрезка 1731. В отрасли промышленности отрезки буксируемой косы обычно моделируют натянутыми непрерывными балками, которые описываются следующим дифференциальным уравнением в частных производных:
[68] ,
[69] где Е - модуль Юнга, I - момент инерции в поперечном сечении, y(x, t) - поперечное смещение, x - продольная координата, Т - натяжение, ρА - масса балки на единицу длины (плотность, умноженная на площадь) отрезка 1731 буксируемой косы; и p(x, t) - внешняя сила на единицу длины, действующая на отрезок 1731 буксируемой косы. При решении этого уравнения для собственной частоты результат зависит от длины отрезка 1731 буксируемой косы в соответствии со следующим уравнением:
[70] ,
[71] где ωn - n-ная мода собственной частоты колебаний и l - длина представляющего интерес отрезка.
[72] В одном варианте осуществления изобретения область между разделительными элементами 1741 и 1742 может быть заполнена акустически прозрачной средой 1750, например водой, гелем, пеной или чем-либо подобным. Сейсмические волны, подходящие к датчику 1720, встречают акустически прозрачную оболочку 1730 буксируемой косы и акустически прозрачную среду 1750 и возбуждают датчик 1720 с минимальной потерей энергии на отражения. Разделительные элементы 1741 и 1742 могут быть разнесены на достаточно большое расстояние, чтобы резонансная частота отрезка 1731 буксируемой косы была ниже самой низкой представляющей интерес частоты. Отрезок 1731 буксируемой косы, содержащий датчик 1720 и тем самым являющийся акустически мобильным, может перемещаться в фазе с движением частиц падающей акустической волны. Монтажная опора 1721 датчика, связанная с оболочкой 1730 буксируемой косы, также может перемещаться в фазе с движением частиц акустической волны и передавать это движение к датчику 1720, находящемуся внутри. Поэтому датчик 1720 движения частиц способен измерять движение частиц, связанное с сейсмическими акустическими волнами. Обычно конструкцию и состав датчика 1720, монтажной опоры 1721 и оболочки 1730 можно выбирать, чтобы они имели нейтральную плавучесть; но эти параметры можно изменять, если для датчика движения желательно иметь неединичное усиление по отношению к показателю движения частиц.
[73] Как показано на фиг. 18, узел датчика сейсмической системы 19 может быть установлен в кабеле 120 буксируемой косы или в устройстве управления положением кабеля, таком как регулятор 122 глубины погружения кабеля и направления кабеля, с возможностью поворота прикрепленный к буксируемой косе с помощью колец 124. Как показано на фиг. 19, узел датчика сейсмической системы 19 может размещаться в устройстве 126 управления положением кабеля, соединенном в линию между передней частью и задней частью отрезков 128, 129 буксируемой косы. Очевидно, датчики могут быть установлены в других устройствах, закрепляемых в, на буксируемой косе, морском донном кабеле или автономном узле или прикрепляемых к ним.
[74] На фиг. 20 показан другой вариант осуществления, в котором сейсмическая система из фиг. 7 и/или фиг. 17 реализована как морская донная система, например, как морской донный кабель, морской донный узел или что-либо подобное. Как показано на фиг. 20, первый корпус 2030 может включать в себя первый датчик 2040, который выполнен с возможностью измерения движения частиц (и шума, в некоторых вариантах осуществления). Например, датчик 2040 и корпус 2030 могут быть выполнены имеющими нейтральную плавучесть и могут удерживаться системой 2134 подвески с резонансной частотой ниже самой низкой представляющей интерес частоты. Второй датчик 2041 может быть расположен во втором корпусе 2031 и выполнен с возможностью измерения шума платформы. Источники шума платформы в морской донной системе могут включать в себя морские течения, буровые работы по соседству, геологические сейсмические исследования, шум от судов, проходящих над системой и т.п. В одном варианте осуществления второй корпус 2031 может быть жестким и плотным, в результате имеющим плохую акустическую подвижность. Поэтому второй корпус может по существу изолировать второй датчик 2041, делая его нечувствительным к сейсмическим волнам от сейсмического источника.
[75] Третий корпус 2032 может включать в себя гидрофон или группу гидрофонов 2042. В одном варианте осуществления третий корпус 2032 может быть изготовлен из акустически прозрачного материала для гарантии надлежащей работы гидрофона; или в другом варианте осуществления гидрофон или гидрофоны могут быть незащищенными. Второй корпус 2031 и третий корпус 2032 могут быть соединены жестким соединителем 2033 для обеспечения надлежащей длины акустически мобильной системы 2134 подвески.
[76] Трехкомпонентный акселерометр с откликом к постоянной составляющей, подобный отклику датчика VectorSeis, изготавливаемого ION Geophysical Corporation из Хьюстона, Техас, США, пригоден для многих вариантов осуществления изобретения. Поскольку в сейсмическом импульсе нет постоянной составляющей, отклик для постоянной составляющей датчика перемещения используется при обнаружении ориентации датчика относительно силы тяжести. Одна ось датчика рассчитана на нахождение в известной ориентации к оси буксируемой косы. Поскольку ориентация оси буксируемой косы известна, а вектор силы тяжести измеряется, ориентация датчика, и поэтому приходящий обнаруживаемый сейсмический импульс можно электронным способом поворачивать относительно силы тяжести, так что восходящие сейсмические импульсы могут приниматься и нисходящие сейсмические импульсы подавляться.
[77] Могут использоваться любые датчики, которые обнаруживают перемещение. Датчики могут быть любыми датчиками перемещения, чувствительными к положению, скорости или ускорению. Например, для достижения желаемого результата первый геофон на карданном подвесе, описанный Tenghamn и соавторами в патенте США № 7239577, может быть объединен с вторым геофоном, скомпонованным так, что он имеет слабую чувствительность к акустической волне или не имеет ее и такую же чувствительность к перемещению буксируемой косы. Пьезоэлектрические акселерометры могут использоваться при условии, что они имеют надлежащие свойства датчика.
[78] Если с помощью датчика не может быть определена его ориентация, в систему датчиков можно включать отдельные датчики ориентации. В ином случае механические средства, такие как карданная система, можно использовать для фиксации датчиков в известной ориентации. Кроме того, имеющие крылья устройства, прикрепляемые к буксируемой косе, иногда называемые «птичками», можно использовать для приведения датчика в заданную ориентацию.
[79] Хотя изложенное выше было обращено к вариантам осуществления настоящего изобретения, другие и добавочные варианты осуществления изобретения могут быть разработаны без отступления от основного объема его, и объем его определяется формулой изобретения, которая следует ниже.
Реферат
Изобретениеотносится к области геофизики и может быть использовано при проведении сейсморазведочных мероприятий. Предложена сейсмическая кабельная система датчиков. Сейсмическая кабельная система датчиков может включать в себя кабель, первый датчик, выполненный с возможностью измерения перемещения кабеля, при этом из измерения перемещения первым датчиком, по существу, исключено движение частиц, связанное с сейсмическими волнами, и второй датчик, выполненный с возможностью измерения движения частиц, связанного с сейсмическими волнами. Технический результат – повышение точности и достоверности получаемых данных. 4 н. и 13 з.п. ф-лы, 20 ил.
Комментарии