Понижение уровня шума с использованием данных вращения - RU2562932C2
Код документа: RU2562932C2
Чертежи




Описание
УРОВЕНЬ ТЕХНИКИ
[0001] Сейсморазведка используется для выявления подземных элементов, таких как месторождения углеводородов, пресноводные водоносные пласты, зоны нагнетания природного газа и т.д. При сейсморазведке источники сейсмических сигналов размещаются в различных местах на поверхности земли или на морском дне, при этом источники сейсмических сигналов приводятся в действие, чтобы генерировать сейсмические волны, направленные в подземную структуру.
[0002] Сейсмические волны, сгенерированные источником сейсмических сигналов, распространяются в подземную структуру, при этом часть сейсмических волн отражается назад к поверхности, чтобы быть полученной сейсмическими датчиками (например, геофонами, акселерометрами и т.д.). Эти сейсмические датчики вырабатывают сигналы, которые представляют детектированные сейсмические волны. Сигналы от сейсмических датчиков обрабатываются с целью получения информации о содержании и характеристике подземной структуры.
[0003] Типичная компоновка для проведения сейсморазведки наземного базирования включает ввод в действие массива сейсмических датчиков на поверхности земли. Проведение разведки с базированием на море, как правило, включает ввод в действие сейсмических датчиков на морском сейсморазведочном кабеле или придонном кабеле.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В общем случае, согласно некоторым вариантам воплощения, способ включает получение от сейсмического датчика измеренных сейсмических данных и получение данных вращения, представляющих вращение относительно, по меньшей мере, одной определенной оси. Данные вращения комбинируются, используя адаптивную фильтрацию, с измеренными сейсмическими данными с целью понижения уровня, по меньшей мере, части компоненты шума в измеренных сейсмических данных.
[0005] В общем случае, согласно дополнительным вариантам воплощения, изделие, включающее, по меньшей мере, один машиночитаемый носитель информации, хранит команды, которые, по мере выполнения, приводят к тому, что система, имеющая процессор, предназначенный для получения сейсмических данных, измеренных с помощью сейсмического датчика, получает данные вращения, представляющие вращение относительно, по меньшей мере, одной определенной оси, и комбинирует, используя адаптивную фильтрацию, полученные сейсмические данные и полученные данные вращения с целью осуществления понижения по меньшей мере части компоненты шума в полученных сейсмических данных.
[0006] В общем случае, согласно другим вариантам воплощения, система включает носитель информации, предназначенный для хранения сейсмических данных, измеренных с помощью сейсмического датчика, и данных вращения, и, по меньшей мере, один процессор, предназначенный для применения адаптивной фильтрации с целью комбинирования сейсмических данных и данных вращения для устранения, по меньшей мере, части компоненты шума в сейсмических данных.
[0007] В альтернативных или дополнительных вариантах воплощения данные вращения измеряются с помощью датчика вращения.
[0008] В альтернативных или дополнительных вариантах воплощения комбинирование комбинирует данные вращения, полученные отдельно от датчика вращения, с сейсмическими данными, полученными отдельно от сейсмического датчика, с целью осуществления понижения, по меньшей мере, части компоненты шума.
[0009] В альтернативных или дополнительных вариантах воплощения данные вращения оцениваются, исходя из измерений, по меньшей мере, двух сейсмических датчиков, которые разнесены менее чем на предварительно заданное расстояние.
[0010] В альтернативных или дополнительных вариантах воплощения осуществляется прием компоненты вращения относительно первой оси и компоненты вращения относительно второй оси, в общем случае перпендикулярной первой оси.
[0011] В альтернативных или дополнительных вариантах воплощения данные вращения основаны на измерениях вторым датчиком, при этом второй датчик совмещен с сейсмическим датчиком внутри кожуха, или же второй датчик отнесен от сейсмического датчика менее чем на предварительно заданное расстояние.
[0012] В альтернативных или дополнительных вариантах воплощения при адаптивной фильтрации используются данные вращения с целью получения опорного шумового сигнала для адаптивного вычитания из сейсмических данных.
[0013] В альтернативных или дополнительных вариантах воплощения адаптивное вычитание зависит от расстояния источник-приемник.
[0014] В альтернативных или дополнительных вариантах воплощения адаптивное вычитание зависит от частоты.
[0015] В альтернативных или дополнительных вариантах воплощения данные расходимости принимаются от датчика расходимости, и адаптивная фильтрация дополнительно комбинирует данные расходимости и данные вращения с сейсмическими данными с целью понижения уровня, по меньшей мере, части компоненты шума.
[0016] В альтернативных или дополнительных вариантах воплощения принимается горизонтальная компонента сейсмических данных, и адаптивная фильтрация дополнительно комбинирует горизонтальную компоненту сейсмических данных и данные вращения с сейсмическими данными с целью понижения уровня, по меньшей мере, части компоненты шума.
[0017] В альтернативных или дополнительных вариантах воплощения сейсмические данные измеряются вдоль вертикальной оси и включают вертикальную компоненту сейсмических данных, и адаптивная фильтрация дополнительно комбинирует одну или более компонент данных вращения, измеренных вокруг горизонтальной оси, с вертикальной компонентой сейсмических данных с целью понижения уровня, по меньшей мере, части компоненты шума.
[0018] В альтернативных или дополнительных вариантах воплощения компонента шума включает горизонтально распространяющуюся волну.
[0019] В альтернативных или дополнительных вариантах воплощения сейсмические данные включают одну или более из векторной компоненты в вертикальном направлении, векторной компоненты в первом горизонтальном направлении и векторной компоненты во втором горизонтальном направлении, которое в общем случае является перпендикулярным первому горизонтальному направлению, и данные вращения включают одну или более из первой компоненты вращения относительно вертикального направления, второй компоненты вращения относительно первого горизонтального направления и третьей компоненты вращения относительно второго горизонтального направления.
[0020] В альтернативных или дополнительных вариантах воплощения адаптивная фильтрация включает вычисление, по меньшей мере, одного согласующего фильтра, который предназначен для понижения, в смысле наименьших квадратов, уровня шума в сейсмических данных в заданном временном окне.
[0021] В альтернативных или дополнительных вариантах воплощения к данным вращения применяется согласование данных с целью улучшения корреляции шума.
[0022] В альтернативных или дополнительных вариантах воплощения понижение уровня, по меньшей мере, части компоненты шума осуществляется на основе сейсмических данных и данных вращения, полученных только от отдельной сенсорной станции, что позволяет осуществить понижение уровня шума без необходимости получения сейсмических данных от других сенсорных станций, которые являются частью конфигурации сенсорных станций.
[0023] В альтернативных или дополнительных вариантах воплощения сенсорная станция отнесена от другой сенсорной станции на расстояние, большее, чем самая короткая длина волны шума.
[0024] В альтернативных или дополнительных вариантах воплощения данные вращения включают поля вращения относительно множества горизонтальных направлений.
[0025] Другие или альтернативные характерные особенности будут очевидными из нижеследующего описания, из чертежей и из формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0026] Некоторые варианты воплощения описаны относительно нижеследующих чертежей:
на фигуре 1 представлена схематическая диаграмма примерной компоновки сенсорных устройств, которая может быть введена в действие для проведения сейсморазведки, согласно некоторым вариантам воплощения;
на фигурах 2 и 3 представлены схематические диаграммы сенсорных устройств согласно различным вариантам воплощения; и
на фигурах 4-6 представлены блок-схемы способов осуществления понижения уровня шума согласно различным вариантам воплощения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0027] При проведении сейсморазведки (сейсморазведки морского или наземного базирования) сейсмические датчики (например, геофоны, акселерометры и т.д.) используются для измерения сейсмических данных, таких как данные смещения, скорости или ускорения. Сейсмические датчики могут включать геофоны, акселерометры, МЭМС (микроэлектромеханические системы)-датчики или любые другие типы датчиков, которые измеряют трансляционное смещение поверхности, по меньшей мере, в вертикальном направлении и, возможно, в одном или обоих горизонтальных направлениях. Сейсмический датчик на поверхности земли может регистрировать векторную часть упругого волнового поля непосредственно под свободной поверхностью (например, поверхностью суши или морского дна). Когда вводятся в действие многокомпонентные датчики, векторные волновые поля могут быть измерены во многих направлениях, таких как три ортогональных направления (вертикальное Z, горизонтальное продольное X, горизонтальное поперечное Y). В операциях сейсморазведки морского базирования вместе с многокомпонентными векторными датчиками для измерения флуктуаций давления в воде дополнительно могут предусматриваться гидрофонные датчики.
[0028] Регистрируемые сейсмические данные могут содержать вклады от шума, включая горизонтально распространяющийся шум, такой как поверхностные шумовые волны. Поверхностные шумовые волны относятся к сейсмическим волнам, которые образуются сейсмическими источниками или другими источниками, такими как движущиеся автомобили, двигатели, насос, и природными явлениями, такими как ветер и океанские волны, которые распространяются в общем случае горизонтально вдоль поверхности земли по направлению к сейсмоприемникам. Эти горизонтально распространяющиеся сейсмические волны, такие как волны Рэлея или волны Лява, являются нежелательными компонентами, которые могут загрязнить сейсмические данные. Другой тип поверхностных шумовых волн включает волны Шолте, которые распространяются горизонтально под поверхностью дна моря. Другие типы горизонтального шума включают поперечные упругие волны или продольные волны. Еще другой тип шума включает воздушную волну, которая является горизонтальной волной, которая распространяется в области границ раздела между воздухом и водой в ситуации проведения морской разведки.
[0029] В нижеследующем обсуждении дается ссылка на поверхностные шумовые волны и, в частности, устранение или понижение уровня поверхностных шумовых волн в измеренных сейсмических данных. Однако, в альтернативных вариантах воплощения подобные способы понижения уровня шума могут быть применены для устранения или понижения уровня других типов шума.
[0030] Поверхностные шумовые волны являются, как правило, видимыми в записи показаний (накопленных одним или более сейсмическими датчиками) в виде дисперсионного шумового пакета, имеющего высокую амплитуду, являющегося, как правило, эллиптически поляризованным, имеющего малую частоту и распространяющегося с малой скоростью. Поверхностные шумовые волны часто искажают или маскируют события отражения, содержащие информацию от более глубоко расположенных подземных отражателей. Для повышения точности определения характеристик подземной структуры на основе сейсмических данных, накопленных при проведении операции сейсморазведки, желательно устранение или понижение уровня шумовых вкладов, включая поверхностные шумовые волны или другой тип шума.
[0031] Согласно некоторым вариантам воплощения для устранения или понижения уровня шумовой компоненты (например, любой одной или более из шумовых компонент, отмеченных выше) данные вращения комбинируются с сейсмическими данными для устранения или понижения уровня шумовой компоненты в сейсмических данных. В некоторых вариантах воплощения данные вращения могут быть измерены с помощью датчика вращения. Данные вращения относятся к компоненте вращения сейсмического волнового поля. Как пример, одним типом датчика вращения является датчик вращения R-1 компании Eentec, находящейся в Сент-Луисе, штат Миссури. В других примерах могут использоваться другие датчики вращения.
[0032] Данные вращения относятся к скорости вращения (или изменению вращения во времени) вокруг горизонтальной оси, такой как вокруг горизонтальной продольной оси (X), и/или вокруг горизонтальной поперечной оси (Y), и/или вокруг вертикальной оси (Z). В контексте проведения сейсморазведки морского базирования продольная ось X относится к оси, которая в общем случае является параллельной направлению смещения морского сейсморазведочного кабеля с датчиками для проведения разведки. Поперечная ось Y является в общем случае перпендикулярной продольной оси X. Вертикальная ось Z является в общем случае перпендикулярной обеим осям X и Y. В контексте проведения сейсморазведки наземного базирования продольная ось X может быть выбрана таким образом, что она может соответствовать любому горизонтальному направлению, в то время как поперечная ось Y может быть любой осью, которая в общем случае является перпендикулярной оси X.
[0033] В некоторых примерах датчик вращения может быть многокомпонентным датчиком вращения, который способен обеспечить проведение измерений скоростей вращения вокруг множества перпендикулярных осей (например, RX вокруг продольной оси X, RY вокруг поперечной оси Y и RZ вокруг вертикальной оси Z). В общем случае Ri представляет данные вращения, при этом нижний индекс i представляет ось (X, Y или Z), вокруг которой измеряются данные вращения.
[0034] В альтернативных вариантах воплощения вместо использования датчика вращения для измерения данных вращения данные вращения могут быть получены из измерений (именуемых «векторными данными»), полученных с помощью, по меньшей мере, двух близко расположенных друг от друга сейсмических датчиков, используемых для измерения компоненты сейсмического волнового поля вдоль определенного направления, такого как вертикальное направление Z. Данные вращения могут быть получены из векторных данных, полученных с помощью близко расположенных друг от друга сейсмических датчиков, которые разнесены на расстояние, не большее некоторого предварительно заданного расстояния (далее обсуждается ниже).
[0035] В некоторых примерах данные вращения могут быть получены в двух перпендикулярных компонентах. Первая компонента находится по направлению к источнику (вращение вокруг поперечной оси Y в продольно-вертикальной плоскости, плоскости X-Z), и вторая компонента является перпендикулярной первой компоненте (вращение вокруг продольной оси X в поперечно-вертикальной плоскости, плоскости Y-Z). В такой геометрии вращение в плоскости X-Z доминируется прямыми поверхностными шумовыми волнами, в то время как перпендикулярная компонента будет доминироваться рассеянными вбок поверхностными волнами, что может улучшить подавление шума с использованием адаптивного вычитания.
[0036] Поскольку источники могут располагаться на любом расстоянии и под любым полярным углом по отношению к местоположению датчика вращения, первая компонента может не всегда быть направленной к источнику, в то время как вторая компонента может не быть перпендикулярной к направлению от источника к приемнику. В данных ситуациях может быть применена следующая предварительная обработка, направленная на осуществление математического поворота обеих компонент с переводом их в геометрию, описанную выше. Такой способ называется векторным вращением, который предоставляет данные, отличные от измеренных данных вращения, к которым применяется векторное вращение. Измеренные компоненты вращения RX и RY перемножаются с матрицей, которая является функцией угла θ между осью X датчика вращения и направлением на источник от датчика вращения

[0037] Вышеупомянутая операция приводит в результате к желаемому вращению в плоскости X-Z (RC) и плоскости Y-Z (RI).
[0038] Другой необязательной стадией предварительной обработки является интегрирование по времени (t) данных вращения. Этот шаг может быть математически описан как:

[0039] Вышеупомянутое интегрирование по времени данных вращения приводит в результате к фазовому сдвигу волновой формы и сдвигу ее спектра в сторону более низких частот.
[0040] Данные вращения (например, RX и/или RY), являются ли они измеренными датчиком вращения или полученными на основе результатов измерений сейсмическим датчиком, могут быть использованы в качестве модели опорного шумового сигнала для очистки сейсмических данных (например, вертикальных сейсмических данных). В некоторых вариантах воплощения могут применяться способы адаптивной фильтрации (например, способы адаптивного вычитания) с целью использования данных вращения при осуществлении понижения уровня шума в зарегистрированных сейсмических данных. Способ адаптивной фильтрации относится к способу, в котором получается один или более фильтров, при этом фильтры комбинируются с зарегистрированными сейсмическими данными с целью модификации сейсмических данных так, чтобы устранить компоненту(ы) шума.
[0041] В некоторых вариантах воплощения способы адаптивной фильтрации могут быть использованы для осуществления понижения уровня шума с использованием данных вращения. В некоторых примерах способ адаптивной фильтрации является способом адаптивного вычитания, таким как способ адаптивного вычитания на основе способов, описанных в патенте США № 5971095, который включен сюда путем ссылки. В патенте США № 5971095 описаны способы адаптивного вычитания, в которых используются несколько компонент в качестве опорных шумовых сигналов с целью извлечения поверхностных шумовых волн из сейсмических данных Z в пределах окон время-дистанция переменной длины. Отметим, однако, что способы адаптивного вычитания, описанные в патенте США № 5971095, не включают использование данных вращения. В других вариантах воплощения могут применяться другие способы адаптивной фильтрации.
[0042] Данные вращения могут быть использованы сами по себе для понижения уровня шума или, как вариант, подавление шума на основе данных вращения может сочетаться с другими типами способов понижения уровня шума. Существуют различные примерные категории способов понижения уровня шума. Способы понижения уровня шума первой категории включают использование различия в частотном содержании между шумовыми сигналами (которые располагаются в диапазоне более низких частот) и сейсмическими сигналами (которые располагаются в диапазоне более высоких частот). Другая категория способов понижения уровня шума включает использование разницы в скоростях между шумовыми сигналами (которые в общем случае имеют более низкие скорости) и сейсмическими сигналами (которые в общем случае имеют более высокие скорости). Другая категория способов понижения уровня шума включает использование информации о данных поляризации, например, поверхностные шумовые волны, как правило, имеют характерную эллиптическую поляризацию, в то время как сейсмические сигналы, как правило, обладают линейной поляризацией. Разница в поляризациях может быть использована для отделения шума от сейсмических данных.
[0043] Еще одна категория способов понижения уровня шума включает использование горизонтальной компоненты сигнала в качестве опорного шумового сигнала без предположений относительно поляризации данных. Горизонтальная компонента сигнала содержит меньшую энергию отраженного сигнала (энергия отраженного сигнала относится к энергии, связанной с отражением сейсмических волн от подземных элементов). Как результат, горизонтальная компонента сигнала обеспечивает хороший опорный шумовой сигнал, который может быть использован для очистки вертикальной компоненты сигнала (которая является более чувствительной к наличию подземных элементов) с использованием различных типов способов адаптивной фильтрации.
[0044] Как пример способа понижения уровня шума, основанного на использовании горизонтальной компоненты сигнала в качестве опорного шумового сигнала, могут быть использованы данные расходимости, полученные от датчика расходимости. Данные расходимости могут быть скомбинированы с сейсмическими данными для осуществления понижения уровня шума в сейсмических данных. В некоторых вариантах воплощения датчик расходимости образуется с использованием контейнера, заполненного веществом, в котором находится датчик давления (например, гидрофон). Вещество, в которое погружен датчик давления, может быть жидкостью, гелем или твердым веществом, таким как песок или пластик. Датчик давления в такой компоновке может регистрировать отклик сейсмической расходимости подземной области, при этом данная сейсмическая расходимость составляет горизонтальную компоненту сигнала.
[0045] На фигуре 1 представлена схематическая диаграмма компоновки сенсорных устройств (сенсорных станций) 100, которые используются для проведения сейсморазведки наземного базирования. Отметим, что способы или механизмы могут быть также применены в компоновках для проведения разведки морского базирования. Сенсорные устройства 100 вводятся в действие на поверхности земли 108 (в виде ряда или массива). Нахождение сенсорного устройства 100 "на" поверхности земли означает, что сенсорное устройство 100 располагается либо на и над поверхностью земли, либо погружено (полностью или частично) под землю таким образом, что сенсорное устройство 100 располагается в пределах глубины приблизительно 10 метров от поверхности земли, хотя в некоторых вариантах воплощения может быть подходящим и другое удаление, в зависимости от используемого оборудования. Поверхность земли 108 находится над подземной структурой 102, которая содержит, по меньшей мере, один подземный элемент 106, представляющий интерес (например, месторождение углеводородов, пресноводный водоносный пласт, зону нагнетания природного газа и т.д.). Один или более сейсмических источников 104, которые могут быть вибрационными сейсмическими источниками, пневматическими источниками сейсмических сигналов, взрывными устройствами и т.д., вводятся в действие в поле проведения разведки, в котором размещаются сенсорные устройства 100. Один или более сейсмических источников 104 также располагаются на поверхности земли 108.
[0046] Приведение в действие сейсмических источников 104 вызывает распространение сейсмических волн в подземную структуру 102. Как вариант, вместо использования управляемых сейсмических источников, как отмечается выше, для обеспечения управляемого источника или активной разведки могут быть использованы способы, согласно некоторым вариантам воплощения, в контексте пассивной разведки. При проведении пассивной разведки сенсорные устройства 100 используются для осуществления одного или более из следующего: наблюдения за (микро)землетрясениями; наблюдения за гидравлическими разрывами пластов, при которых микроземлетрясения наблюдаются вследствие разрушения горных пород, вызванного текучими средами, которые активно нагнетаются в подземную область (например, для осуществления подземного разрыва); и т.д.
[0047] Сейсмические волны, отраженные от подземной структуры 102 (и от подземного элемента 106, представляющего интерес), распространяются по направлению вверх к сенсорным устройствам 100. Сейсмические датчики 112 (например, геофоны, акселерометры и т.д.) в соответствующих сенсорных устройствах 100 измеряют сейсмические волны, отраженные от подземной структуры 102. Более того, согласно различным вариантам воплощения, сенсорные устройства 100 дополнительно включают датчики вращения 114, которые сконструированы для измерения данных вращения.
[0048] Хотя сенсорное устройство 100 описано включающим как сейсмический датчик 112, так и датчик вращения 114, отметим, что в альтернативных вариантах воплощения сейсмические датчики 112 и датчики вращения 114 могут быть включенными в отдельные сенсорные устройства. Как другой вариант, датчики вращения 114 могут отсутствовать, при этом данные вращения получаются на основе измерений, полученных с помощью, по меньшей мере, двух близко расположенных друг от друга сейсмических датчиков 112 (разнесенных друг от друга на расстояние, меньшее предварительно заданного расстояния или дистанции).
[0049] В дополнительных альтернативных вариантах воплощения в сенсорные устройства 100 могут быть также включены другие типы датчиков, включая датчики расходимости, как обсуждается выше. Как отмечается выше, данные расходимости, полученные от датчиков расходимости, могут быть использованы для получения модели опорного шумового сигнала с целью осуществления понижения уровня шума. В таких вариантах воплощения данные расходимости и данные вращения могут быть скомбинированы с сейсмическими данными с целью понижения уровня шума в сейсмических данных. Как дополнительный вариант, другой тип способа понижения уровня шума может сочетаться с использованием данных вращения с целью подавления шума в сейсмических данных.
[0050] В некоторых вариантах воплощения сенсорные устройства 100 соединяются с помощью электрического кабеля 110 с системой управления 116. Как вариант, вместо соединения сенсорных устройств 100 с помощью электрического кабеля 110 сенсорные устройства 100 могут сообщаться с системой управления 116 с помощью беспроводного соединения. В некоторых примерах могут обеспечиваться промежуточные маршрутизаторы или концентраторы в промежуточных точках сети, состоящей из сенсорных устройств 100, с целью обеспечения связи между сенсорными устройствами 100 и системой управления 116.
[0051] Система управления 116, показанная на фигуре 1, дополнительно включает технологическое программное обеспечение 120, которое выполняется на одном или более процессоров 122. Процессор(ы) 122 соединен(ы) с носителем информации 124 (например, одним или более дисковых запоминающих устройств и/или одним или более устройств памяти). В примере, показанном на фигуре 1, носитель информации 124 используется для хранения сейсмических данных 126, переданных от сейсмических датчиков 112 сенсорных устройств 100 контроллеру 116, и для хранения данных вращения 128, переданных от датчиков вращения 114 или полученных от близко расположенных друг от друга сейсмических датчиков. Носитель информации 124 может также быть использован для хранения данных расходимости (не показаны) в вариантах воплощения, в которых используются датчики расходимости.
[0052] Кроме того, в дополнительных вариантах воплощения носитель информации 124 может также быть использован для хранения данных горизонтального перемещения (данных перемещения по оси X и/или Y). Данные перемещения в направлениях по осям X и Y также называются горизонтальными векторными компонентами, представленными, соответственно, как UX и/или UY. Данные UX и/или UY (которые могут быть измерены с помощью соответствующих компонент X и Y сейсмических датчиков 112) могут также быть использованы для представления шума с целью понижения уровня шума. Данные UX и/или UY могут быть скомбинированы с данными вращения и, возможно, с данными расходимости с целью понижения уровня шума.
[0053] В процессе работы технологическое программное обеспечение 120 используется для обработки сейсмических данных 126 и данных вращения 128. Данные вращения 128 комбинируются с сейсмическими данными 126 с использованием способов, обсуждаемых дополнительно ниже, с целью понижения уровня шума в сейсмических данных 126 (для получения очищенного варианта сейсмических данных). Технологическое программное обеспечение 120 может затем вырабатывать выходной результат с целью характеризации подземной структуры 102, основываясь на очищенных сейсмических данных 126.
[0054] Как отмечается выше, согласно альтернативным вариантам воплощения, технологическое программное обеспечение 120 может комбинировать данные вращения 128, наряду с данными расходимости и/или данными перемещений по осям X и/или Y (горизонтальные векторные компоненты UX и/или UY), с сейсмическими данными 126 с целью проведения очистки сейсмических данных.
[0055] На фигуре 2 проиллюстрирован пример сенсорного устройства (или сенсорной станции) 100 согласно некоторым примерам. Сенсорное устройство 100 может включать сейсмический датчик 112, который может быть датчиком движения частиц (например, геофоном или акселерометром), предназначенным для восприятия скорости частицы вдоль определенной оси, такой как ось Z. Кроме того, сенсорное устройство 100 включает первый датчик вращения 204, который ориентирован таким образом, чтобы измерять поперечную скорость вращения (RX) вокруг продольной оси (оси X), и второй датчик вращения 206, который ориентирован таким образом, чтобы измерять продольную скорость вращения (RY) вокруг поперечной оси (оси Y). В других примерах сенсорное устройство 100 может включать только один из датчиков вращения 204 и 206. В дополнительных альтернативных примерах, в которых данные вращения получаются из сейсмических данных вдоль оси Z, измеренных близко расположенными друг от друга сейсмическими датчиками, оба датчика 204 и 206 могут отсутствовать. Сенсорное устройство 100 имеет кожух 210, в котором содержатся датчики 112, 204 и 206.
[0056] Сенсорное устройство 100 дополнительно включает (показано в виде пунктирного профиля) датчик расходимости 208, который может быть включен в некоторых примерах сенсорного устройства 100, однако может отсутствовать в других примерах.
[0057] Пример датчика расходимости 208 показан на фигуре 3. Датчик расходимости 208 имеет закрытый контейнер 300, который является герметизированным. Контейнер 300 содержит объем жидкости 302 (или другого вещества, такого как гель или твердое вещество, такое как песок или пластик) внутри контейнера 300. Более того, контейнер 300 содержит гидрофон 304 (или другой тип датчика давления), который погружен в жидкость 302 (или другое вещество). Гидрофон 304 механически отделен от стенок контейнера 300. В результате гидрофон 304 является чувствительным только к акустическим волнам, которые возбуждаются в жидкости 302 через стенки контейнера 300. Для удержания фиксированного положения гидрофон 304 крепится с помощью соединительного механизма 306, который гасит распространение акустических волн через соединительный механизм 306. Примеры жидкости 302 включают следующие: керосин, минеральное масло, растительное масло, силиконовое масло и воду. В других примерах могут быть использованы другие типы жидкостей или другое вещество.
[0058] На фигуре 4 показана блок-схема способа понижения уровня шума на основе данных вращения согласно некоторым вариантам воплощения. В некоторых вариантах воплощения способ, представленный на фигуре 4, может быть осуществлен с помощью технологического программного обеспечения 120, представленного на фигуре 1, или некоторого другого модуля.
[0059] В способе, представленном на фигуре 4, от сейсмического датчика (например, 112 на фигуре 1) принимаются (под номером 402) измеренные сейсмические данные. В способе, представленном на фигуре 4, также принимаются (под номером 404) данные вращения, которые могут быть измерены с помощью датчика вращения (например, 204 и/или 206 на фигуре 2) или могут быть получены на основе измерений (например, вертикальных векторных полей) близко расположенными друг от друга сейсмическими датчиками.
[0060] В способе затем комбинируются (под номером 406), используя адаптивную фильтрацию, данные вращения с измеренными сейсмическими данными с целью понижения уровня шумовой компоненты в измеренных сейсмических данных. Хотя опорный сигнал был установлен для измеренных сейсмических данных, полученных от отдельного сейсмического датчика, отмечается, что в альтернативных вариантах воплощения понижение уровня шума может быть применено к измеренным сейсмическим данным, полученным от множества сейсмических датчиков.
[0061] Согласно вышеизложенному опорный шумовой сигнал представляется с помощью данных вращения. Однако, в других вариантах воплощения опорный шумовой сигнал может также быть представлен с помощью других типов данных, включая данные расходимости, векторные данные (данные перемещения) и т.д., которые представляют компоненту шума, которую необходимо устранить, или уровень, который необходимо понизить в полученных сейсмических данных, например, вертикальной компоненты волнового поля скорости. В способе адаптивной фильтрации, примененном под номером 406, может использоваться преимущественно компонента, которая наилучшим образом локально коррелирует с входными данными шума. В некоторых вариантах воплощения адаптивная фильтрация является способом, зависящим от расстояния источник-приемник (адаптивная фильтрация применяется во временных окнах переменной длительности), и, таким образом, адаптивная фильтрация может приводить к понижению уровней событий рассеяния под множеством полярных углов. Отметим, что способ адаптивной фильтрации является, в конце концов, не зависящим от времени для определенных геометрий и приповерхностных состояний.
[0062] Адаптивная фильтрация может включать локальную оценку операторов AX(T) и AY(T) (которые называются «согласующими фильтрами»), которые приводят к уменьшению или минимизации (например, в смысле наименьших квадратов) уровня шума во входных сейсмических данных (например, UZ, которые представляют вертикальные сейсмические данные) в пределах заданного временного окна. Рассматривая отдельное временное окно, очищенные/выходные данные UZ получаются путем:
где T - рассматриваемый временной интервал (окно), а AX(T) и AY(T) вычисляются путем минимизации выражения |UZ(T)-AX(T)UX-AY(T)UY|2, например, в смысле наименьших квадратов. Дополнительные примерные детали относительно вычисления согласующих фильтров представлены в патенте США № 5971095, ссылка на который дается выше. Согласующие фильтры могут зависеть от частоты или, в некоторых вариантах воплощения, быть частотно-независимыми.
[0063] Основными входными параметрами являются размер окна T и длина согласующих фильтров AX(T) и AY(T). В некоторых вариантах воплощения использование кратковременных окон и длинных фильтров полезно для устранения шума (агрессивная фильтрация).
[0064] Отметим также, что согласующие фильтры AX(T) и AY(T) относятся к видимой поляризации сигнала в отдельном окне. В нижеследующем обсуждении дается ссылка на векторную поляризацию для соотношения Z и X (или Y) и вращательную поляризацию для соотношения Z и RX (или RY).
[0065] Как отмечается выше, некоторые варианты воплощения включают использование, по меньшей мере, одной вращательной компоненты в качестве опорного шумового сигнала с целью локального устранения нежелательного шума из (как правило) компоненты Z. «Локальное» устранение нежелательного шума означает, что в способах понижения уровня шума не обязательно используются данные, полученные от массива (массивов) источников или датчиков, - вместо этого понижение уровня шума может быть осуществлено с использованием измерений, полученных от датчиков отдельной сенсорной станции (например, отдельной сенсорной станции 100). Как результат, сенсорная станция 100 не обязательно должна быть введена в действие в виде массива или другой конфигурации сенсорных станций для того, чтобы обеспечить возможность понижения уровня шума. В окружении, которое включает одно или более преград, которые могут нарушить правильную конфигурацию сенсорных устройств, расположение датчика (датчиков) вращения в отдельной сенсорной станции (которая также содержит сейсмический датчик) позволяет понизить уровень шума локально в отдельной сенсорной станции даже без наличия правильной конфигурации сенсорных станций. Таким образом, между сенсорными станциями могут быть обеспечены относительно большие расстояния, при этом сенсорные станции могут быть разнесены друг от друга на расстояние, большее, чем половина самой короткой длины волны шума.
[0066] Далее описывается использование двух опорных шумовых сигналов (данные вращения RX и RY) с целью адаптивного вычитания шума из сейсмических данных вдоль оси Z. Однако, адаптивное вычитание шума не ограничивается только двумя опорными сигналами или компонентой Z. Например, можно использовать пять (или более) опорных сигналов (горизонтальные векторные данные UX и/или UY, данные вращения RX, RY и данные расходимости H или любое сочетание вышеупомянутого).
[0067] В нижеследующем обсуждении делается ссылка на способы понижения уровня шума, в которых используются датчики вращения, с помощью которых измеряется, по меньшей мере, компонента поля вращения поверхности земли вокруг горизонтальных осей (RX или RY) и, в некоторых вариантах воплощения, вокруг вертикальной оси (RZ). Можно предположить, что импульсный отклик датчика вращения известен и надлежащим образом скомпенсирован, - другими словами, данные вращения рассматриваются откалиброванными надлежащим образом относительно сейсмических данных. Однако, в других примерах калибрование данных вращения относительно сейсмических данных не обязательно должно осуществляться.
[0068] Учитывая граничные условия (свободная поверхность, или поверхность земли в случае сейсморазведки наземного базирования, или поверхность морского дна в случае системы базирования на дне океана или сейсморазведки с базированием на дне океана с использованием кабеля), можно показать, что продифференцированные по времени данные поперечной скорости вращения RY равны (или пропорциональны, если отсутствует надлежащая калибровка) продольной пространственной производной вертикального сейсмического поля UZ:

[0069] Продифференцированные по времени данные продольного вращения RX равны (или пропорциональны, если отсутствует надлежащая калибровка) поперечной пространственной производной вертикального сейсмического поля UZ:

[0070] В уравнениях (2) и (3) δx и δy - относительно малые расстояния по сравнению с доминирующей сейсмической длиной волны, однако, изменяются в соответствии с требованиями конкретной ситуации, как будет понятно специалистам в данной области техники. Уравнения (2) и (3) показывают, что результат измерения вращения на свободной поверхности пропорционален пространственному градиенту вертикальной компоненты измеренных сейсмических данных. Следовательно, если датчики вращения не присутствуют, оценку данных вращения можно произвести, используя два или более традиционных сейсмических датчика, расположенных близко друг от друга (так, чтобы находиться в пределах некоторого предварительно заданного расстояния или дистанции). Это расстояние, как правило, является меньшим, чем четверть длины волны, представляющей интерес, и, следовательно, меньшим, чем волновое число Найквиста половины длины волны, представляющей интерес, что обычно является требуемой пространственной дискретизацией для сейсмических волн, которые подвергаются измерению. Отметим, что уравнения (3) и (2) также могут быть переписаны, соответственно, в виде:

где pX и pY - величины, обратные величинам горизонтальных скоростей в продольном и поперечном направлениях (величины, обратные видимым скоростям, соответственно, в направлениях X и Y).
[0071] Уравнения (4) и (5) показывают, что компоненты вращения (RX и RY) являются вариантами вертикальных сейсмических данных в масштабе обратных скоростей (масштабированные, соответственно, на pX и pY). Эти отношения не зависят от рассматриваемого типа волны (например, P-волна, S-волна или волна Рэлея). Следовательно, по меньшей мере, когда датчики являются надлежащим образом откалиброванными совместно, данные вращения находятся в фазе с UZ как для объемных волн, так и для поверхностных волн, в противоположность горизонтальным данным, полученным от геофона, которые находятся в фазе в случае объемных волн (линейная поляризация), однако, имеют сдвиг фаз в случае поверхностных волн (эллиптическая поляризация).
[0072] Уравнения (4) и (5) также показывают, что, касательно данных вращения по сравнению с вертикальными сейсмическими данными, отраженный сигнал (сигнал, отраженный от подземных структур) является значительно уменьшенным по амплитуде (в особенности почти вертикально распространяющиеся P-волны, которые имеют относительно малые значения горизонтальных обратных скоростей) в противоположность более медленно распространяющимся поверхностным волнам (которые имеют более высокие значения горизонтальных обратных скоростей). Другими словами, что касается данных вращения (по сравнению с вертикальными сейсмическими данными), отношение сигналов отраженных волн к поверхностным шумовым волнам является значительно уменьшенным, что означает, что данные вращения содержат преимущественно события поверхностных волн и, следовательно, могут быть использованы в качестве моделей опорного шумового сигнала для адаптивного вычитания.
[0073] Последнее утверждение является также справедливым для горизонтальной векторной компоненты (горизонтальных векторных компонент) UX и/или UY (они также содержат преимущественно шум), но уравнения (4) и (5) также показывают, что, в противоположность UX и/или UY, данные вращения не возмущаются нежелательными S-волнами (которые не коррелируют с UZ). Как уже упоминалось, поляризация вращения зависит от горизонтальной обратной скорости, но не от типа волны, как это происходит в случае, когда рассматривается векторная поляризация. Например, поляризация X по отношению к Z является высокой для S-волн (главным образом поляризованных горизонтально) и малой для P-волн (главным образом поляризованных вертикально).
[0074] Более того, векторная поляризация поверхностных шумовых волн является функцией свойств приповерхностной области (до глубины в несколько сотен метров для низких частот). Это делает векторную поляризацию относительно сложной, что является многообещающим с точки зрения понижения уровня шума на основе адаптивного вычитания.
[0075] В противоположность локальной векторной поляризации, которая зависит от горизонтальной обратной скорости, типа волны и приповерхностной структуры, локальная поляризация вращения зависит исключительно от горизонтальной обратной скорости. Поскольку поляризация вращения является менее сложной, понижение уровня шума на основе данных вращения может обеспечить более качественные результаты по сравнению с понижением уровня шума на основе горизонтальных векторных данных (в предположении использования тех же самых параметров для адаптивного вычитания). Как вариант, можно получить то же самое качество устранения шума с использованием данных вращения, используя, однако, более продолжительные окна переменной длительности и/или более короткие фильтры (даже скаляры), тем самым улучшая эффективность способа понижения уровня шума в терминах времени проведения вычислений.
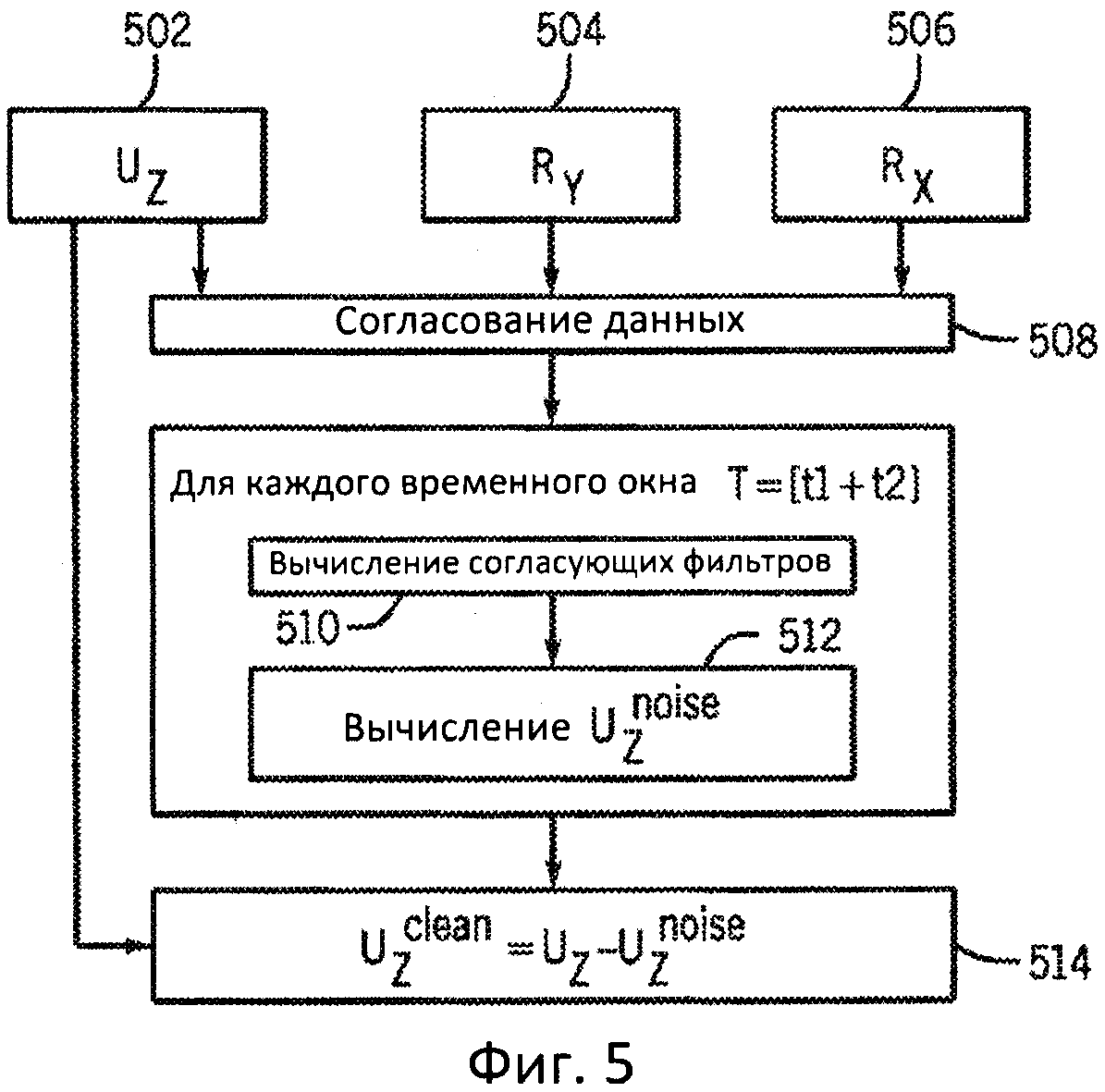
[0076] На фигуре 5 представлена блок-схема способа понижения уровня шума, в котором используются данные вращения в качестве опорных шумовых сигналов, согласно дополнительным вариантам воплощения. Способ, представленный на фигуре 5, может быть также осуществлен с помощью технологического программного обеспечения 120, представленного на фигуре 1, или с помощью другого модуля. Входные данные для осуществления способа понижения уровня шума, представленного на фигуре 5, включают вертикальные сейсмические данные UZ (502) и данные вращения RX (504) и RY (506). Отметим, что в некоторых вариантах воплощения используются две компоненты опорного шумового сигнала (RX и RY), что может быть полезно, когда приповерхностная структура является относительно сложной (такой, как приповерхностная структура, в которой проявляется трехмерное рассеяние). Однако, например, в случае латерально однородной приповерхностной структуры можно использовать одну компоненту вращения в качестве опорного шумового сигнала, как правило, - компоненту вращения, которая содержит большую часть шума, такую как данные RY для продольных взрывов или данные вращения, которое перпендикулярно к азимуту источник-приемник.
[0077] В способе, представленном на фигуре 5, может применяться (под номером 508) согласование данных, которое может включать понижение уровня сейсмических данных (сигнала отражения) по сравнению с данными вращения для того, чтобы сфокусироваться на поверхностных шумовых волнах для применения способа адаптивного вычитания. Например, согласование данных может включать приглушение данных, находящихся вне конуса шума в области время-дистанция. Также или как вариант при согласовании данных может применяться фильтрация низких частот с целью устранения высокочастотного сигнала и может применяться полосовой фильтр, который ограничивает ширину полосы опорного шумового сигнала. Дополнительно или альтернативно при согласовании данных может осуществляться коррекция импульсных откликов сейсмических датчиков и, по возможности (когда имеются в наличии массивы датчиков), при согласовании данных может применяться фильтрация tau-p (где tau - отрезок на оси времени от начала координат до пересечения с продвижением ветви годографа, и p - горизонтальная обратная скорость) или f-k (где f представляет собой частоту, и k представляет собой волновое число) (для понижения уровня быстро распространяющихся сигналов отражений). Другие примеры согласования данных являются интегрированием по времени и вращением вектора вращения по направлению от источника к датчику вращения. Целью стадии согласования данных является улучшение корреляции шума между компонентами. В некоторых вариантах воплощения согласование данных (508) может отсутствовать.
[0078] Как отмечается выше, способ адаптивного вычитания, согласно некоторым вариантам воплощения, является способом, зависящим от расстояния источник-приемник, при котором адаптивное вычитание применяется во временных окнах переменной длительности. Как показано на фигуре 5, каждое из временных окон представляется как T=[t1, t2], где t1 представляет собой начало временного окна T, и t2 представляет собой конец временного окна T. Для каждого временного окна T в способе, представленном на фигуре 5, вычисляются (под номером 510) согласующие фильтры AX(T) и AY(T). Как отмечается выше, согласующие фильтры оцениваются на основе минимизации (например, в смысле наименьших квадратов) шума во входных сейсмических данных в данном временном окне. В частности, согласующие фильтры AX(T) и AY(T) вычисляются в некоторых примерах путем минимизации выражения |UZ(T)-AX(T)UX-AY(T)UY|2 в смысле наименьших квадратов.
[0079] Как только согласующие фильтры AX(T) и AY(T) вычислены, они могут быть скомбинированы (под номером 514) с данными вращения RX(T) и RY(T) с целью вычисления локальной оценки шума вдоль оси Z, UZnoise(T). В частности, локальная оценка вдоль оси Z, UZnoise(T) вычисляется следующим образом:
UZnoise(T)=AY(T)RY(T)+AY(T)RX(T).
[0080] Вычисленная локальная оценка шума вдоль оси Z, UZnoise(T) затем вычитается (под номером 514) из сейсмических данных UZ следующим образом:
UZclean=UZ-UZnoise.
[0081] Подход, представленный на фигуре 5, не включает калибровку датчиков и может быть применен локально, т.е. нет необходимости использования массива источников или приемников. Адаптивная природа способа компенсирует тот факт, что локальные согласующие фильтры зависят от обратной величины скорости. Она может также компенсировать возможные проблемы, связанные с калибровкой и ориентацией.
[0082] Как вариант, когда присутствует плотный массив(ы) приемников, согласование данных (508) может быть распространено с тем, чтобы дополнительно улучшить глобальную корреляцию между компонентами (чтобы сделать поляризацию вращения еще менее сложной). Например, компенсация зависимости от обратной величины скорости может быть произведена путем предварительной обработки в области tau-p (или, как эквивалент, в области f-k) таким образом, что стадия адаптивного вычитания может быть упрощена. Такой способ проиллюстрирован на фигуре 6.
[0083] Входные данные для способа понижения уровня шума, представленного на фигуре 6, включают вертикальные сейсмические данные UZ (602) и данные вращения RX (604) и RY (606). После этого производится согласование данных (под номером 608), при котором производится попытка понижения уровня энергии отражения в данных вращения с тем, чтобы в основном сосредоточиться на поверхностных шумовых волнах (подобно тому, как это делается в подходе, представленном выше на фигуре 5).
[0084] Однако, в способе, представленном на фигуре 6, компоненты вращения (RX и RY) являются p-масштабированными в области tau-p (в которой tau является отрезком на оси времени от начала координат до пересечения с продвижением ветви годографа, и p - горизонтальной обратной скоростью) для того, чтобы непосредственно соответствовать компоненте шума в вертикальных сейсмических данных UZ. p-масштабирование (предварительная обработка в области tau-p) включает задачи 610, 612, 614, 616, 618 и 620, представленные на фигуре 6. В способе данные вращения (соответственно, RX и RY) преобразовываются (под номерами 610, 612) путем осуществления прямого преобразования tau-p, при котором данные вращения преобразовываются в область tau-p (т.е. tau-px и tau-py, соответственно, для RX и RY). Преобразованные данные tau-p делятся затем (под номерами 614, 616) на известные значения, соответственно, px (обратная величина скорости в направлении X) и py (обратная величина скорости в направлении Y). Затем производится обратное преобразование tau-p (под номерами 618, 620). В таких вариантах воплощения в способе адаптивного вычитания с зависимостью от времени осуществляется только попытка выявления компонент вращения, которые наилучшим образом соответствуют шуму по UZ, однако, не делается попытки скорректировать зависимость от p (зависимость от обратной величины скорости). Это может привести к улучшению качества фильтрации или, как вариант, привести к уменьшению времени вычислений путем обеспечения возможности использования больших значений временного окна переменной длительности и/или более коротких согласующих фильтров.
[0085] Отметим, что в процессе предварительной обработки tau-p (610-620 на фигуре 6) обратному преобразованию должен подвергаться только диапазон p, в котором содержится шум. Следовательно, не возникает проблемы, связанной с нестабильностью (деление на p=0), поскольку интерес в способе представляют только относительно высокие значения p (соответствующие медленным поверхностным шумовым волнам).
[0086] Остальные задачи (622, 624 и 626), представленные на фигуре 6, являются теми же, что и соответствующие задачи 510, 512 и 514, представленные, соответственно, на фигуре 5.
[0087] Способы, описанные на фигурах 4-6, могут быть воплощены с помощью машиночитаемых команд (таких, как технологическое программное обеспечение 120, представленное на фигуре 1). Машиночитаемые команды загружаются для выполнения процессором или многими процессорами (например, 122 на фигуре 1). Процессор может включать микропроцессор, микроконтроллер, процессорный модуль или подсистему, программируемую интегральную схему, программируемую вентильную матрицу или другое устройство управления или вычислительное устройство.
[0088] Данные и команды хранятся на соответствующих устройствах хранения информации, которые воплощаются в виде одного или более считываемых компьютером или машиночитаемых носителей информации. Носители информации включают различные формы элементов памяти, включая полупроводниковые устройства памяти, такие как динамические или статические оперативные запоминающие устройства (DRAM или SRAM), стираемые и программируемые постоянные запоминающие устройства (EPROM), электрически стираемые и программируемые постоянные запоминающие устройства (EEPROM) и флеш-память; магнитные диски, такие как несъемные жесткие магнитные диски, дискеты и сменные диски; другие магнитные носители, включая магнитные ленты; оптические носители, такие как компакт-диски (CD) или цифровые видеодиски (DVD); или другие типы устройств хранения информации. Отметим, что команды, обсуждаемые выше, могут предоставляться на одном считываемом компьютером или машиночитаемом носителе информации или, как вариант, могут предоставляться на множестве считываемых компьютером или машиночитаемых носителей информации, распределенных в большой системе, имеющей, возможно, множество узлов. Такой считываемый компьютером или машиночитаемый носитель информации или носители информации рассматривается (рассматриваются) как часть изделия (или продукта производства). Изделие или продукт производства может относиться к любому произведенному отдельному компоненту или множеству компонентов. Носитель или носители информации могут располагаться либо в машине, на которой запускаются машиночитаемые команды, либо располагаться на удаленном сайте, с которого машиночитаемые команды могут быть загружены для исполнения через сеть.
[0089] В вышеприведенном описании изложено множество деталей для обеспечения возможности понимания предмета, описанного здесь. Однако варианты воплощения могут быть реализованы на практике без некоторых или всех из данных деталей. Другие варианты воплощения могут включать модификации и вариации деталей, обсуждаемых выше. Предполагается, что приложенная формула изобретения охватывает такие модификации и вариации.
Реферат
Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных работ. Измеренные сейсмические данные принимаются от сейсмического датчика. Также принимаются данные вращения. Данные вращения представляют вращение относительно, по меньшей мере, одной определенной оси. Причем данные вращения относительно определенной оси обеспечивают получение опорного шумового сигнала для поверхностных шумовых волн, распространяющихся по поверхности земли, на которой установлен сейсмический датчик. Далее осуществляют комбинирование, используя адаптивную фильтрацию, данных вращения с измеренными сейсмическими данными с целью понижения, по меньшей мере, части компоненты шума, содержащей поверхностные шумовые волны в измеренных сейсмических данных. Адаптивная фильтрация содержит адаптивное вычитание опорного шумового сигнала, полученного с использованием данных вращения, из сейсмических данных. Технический результат - повышение точности получаемых данных. 3 н. и 20 з.п. ф-лы, 6 ил.
Формула
получение от сейсмического датчика измеренных сейсмических данных, собранных как часть проведения сейсморазведки наземного базирования;
получение данных вращения, представляющих вращение относительно определенной оси, причем данные вращения относительно определенной оси обеспечивают получение опорного шумового сигнала для поверхностных шумовых волн, распространяющихся по поверхности земли, на которой установлен сейсмический датчик,
комбинирование, используя адаптивную фильтрацию, данных вращения с измеренными сейсмическими данными с целью понижения, по меньшей мере, части компоненты шума, содержащей поверхностные шумовые волны в измеренных сейсмических данных, причем
адаптивная фильтрация содержит адаптивное вычитание опорного шумового сигнала, полученного с использованием данных вращения, из сейсмических данных.
получение данных расходимости от датчика расходимости, содержащего контейнер, содержащий материал и гидрофон, погруженный в материал, причем гидрофон отделен от стенок контейнера;
при этом при адаптивной фильтрации дополнительно комбинируют данные расходимости и данные вращения с сейсмическими данными с целью понижения, по меньшей мере, части компоненты шума.
получение горизонтальной компоненты сейсмических данных, при этом определенная ось представляет собой горизонтальную ось, и при адаптивной фильтрации дополнительно комбинируют горизонтальную компоненту сейсмических данных и данные вращения с сейсмическими данными с целью понижения, по меньшей мере, части компоненты шума.
при этом при адаптивной фильтрации дополнительно комбинируют одну или более компонент данных вращения, измеренных около горизонтальной оси с вертикальной компонентой сейсмических данных с целью понижения уровня, по меньшей мере, части компоненты шума.
получать от сейсмического датчика измеренные сейсмические данные, собранные как часть проведения сейсморазведки наземного базирования;
получать данные вращения, представляющие вращение относительно по меньшей мере горизонтальной оси, причем данные вращения относительно горизонтальной оси обеспечивают получение опорного шумового сигнала для горизонтально перемещающихся шумовых волн, распространяющихся по поверхности земли, на которой установлен сейсмический датчик,
комбинировать, используя адаптивную фильтрацию, данные вращения с измеренными сейсмическими данными с целью понижения уровня, по меньшей мере, части компоненты шума, содержащей горизонтально перемещающиеся шумовые волны из принятых сейсмических данных, причем адаптивная фильтрация содержит адаптивное вычитание опорного шумового сигнала, полученного с использованием данных вращения из сейсмических данных.
при этом данные вращения включают одну или более из первой компоненты вращения относительно вертикального направления, второй компоненты вращения относительно первого горизонтального направления и третьей компоненты вращения относительно второго горизонтального направления.
носитель информации, предназначенный для хранения сейсмических данных, измеренных сейсмическим датчиком, и данных вращения относительно множества перпендикулярных горизонтальных осей, причем данные вращения относительно множества перпендикулярных горизонтальных осей обеспечивают получение опорного шумового сигнала для горизонтально перемещающихся шумовых волн, по поверхности земли, на которой установлен сейсмический датчик,
по меньшей мере, один процессор, предназначенный для того, чтобы:
принимать адаптивную фильтрацию для комбинирования сейсмических данных и данных вращения с целью устранения, по меньшей мере, части компоненты шума, содержащей горизонтально перемещающиеся шумовые волны в сейсмических данных, причем адаптивная фильтрация содержит адаптивное вычитание опорного шумового сигнала, полученного с использованием данных вращения из измеренных сейсмических данных.
Комментарии