Комплексный анализ кинематики для негиперболической кинематической коррекции - RU2458364C2
Код документа: RU2458364C2
Чертежи









Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к структурному анализу сред, а именно к обработке сейсмических данных для анализа подземных структур.
УРОВЕНЬ ТЕХНИКИ
Известные способы построения сейсмических изображений используют систему сейсмических источников и приемников, для сбора данных о подповерхностных (т.е. подземных) структурах. В ответ на сейсмическое воздействие (например, взрыв или механический удар) на некотором источнике каждый из приемников создает сейсмотрассу, т.е. запись сейсмического сигнала на приемнике как функцию времени, за счет отражений воздействующей волны от подповерхностных слоев, располагающихся под системой. Трассы, полученные от множества приемников в ответ на воздействие источников возбуждения, расположенных в разных точках, подвергаются совместной обработке для построения изображения слоев.
В рамках этого процесса, чтобы улучшить отношение сигнал-шум, множество трасс, полученных от пар источник-приемник, окружающих общую глубинную точку (ОГТ) выравнивают по времени, а затем суммируют (подобного рода группу трасс принято называть выборкой, а процессы выравнивания и суммирования трасс известны как коррекция и суммирование нормальных кинематических поправок (НКП)). Выравнивание предназначено для учета разностей времен прохождения сейсмических волн между различными парами источник-приемник. Зависимость времени прохождения обычно представляют в виде гиперболической функции расстояния между источником и приемником, а временной сдвиг, применяемый для выравнивания трасс, чтобы скомпенсировать эту гиперболическую зависимость, вычисляют по несложной формуле, в которую входят расстояние между источником и приемником, а также скорость распространения волн в данной среде.
Известно, однако, что гиперболическая зависимость неточно отражает фактические характеристики подземных структур, и ее использование приводит к потере информации. Поэтому был предложен ряд альтернативных подходов для корректного выравнивания между выборками трасс. Например, в патенте US 5,103,429 раскрыт способ анализа таких структур с применением гомеоморфного отображения (в гомеоморфном образе каждый элемент анализируемого объекта отображается один к одному в соответствующий элемент его образа так, чтобы объект изучения и его образ были топологически эквивалентны). Такой способ, как утверждается, позволяет строить разнообразные виды суммарных разрезов и соответствующих образов без потерь разрешения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В описанных ниже вариантах реализации настоящего изобретения принципы гомеоморфного отображения применяются при обработке группы выборок трасс сейсмических сигналов, именуемой в дальнейшем супервыборкой. Кинематические поправки находятся адаптивно в процессе комплексного кинематического анализа, исходя из оценки параметров волновых фронтов, распространяющихся в подземной среде. Трассы суммируют с учетом этих кинематических поправок, для получения образа среды, который является более точным и подробным, чем те образы, которые могут быть получены известными способами. Описанные ниже способы не только повышают отношение сигнал/шум подповерхностных изображений, но и позволяют учесть такие факторы, как изменения скоростей, как для малоглубинных, так и глубокозалегающих подповерхностных областей, а также кривизну отражающих подповерхностных слоев, а кроме того, позволяют избежать эффектов неравномерного растяжения, свойственных известным способам кинематической поправки.
Хотя раскрытые ниже варианты реализации относятся именно к обработке сейсмических данных и построению образов подповерхностных структур, принципы данного изобретения можно аналогичным образом применять при построении изображений неоднородных сред иного рода.
Таким образом, в соответствии с одним из вариантов реализации настоящего изобретения, предлагается способ компьютерной обработки данных, включающий:
прием совокупности трасс, соответствующих сигналам, возникшим в результате отражения сейсмических волн от подповерхностных структур и принятым в различных точках в течение некоторого времени;
вычисление меры корреляции между трассами как функции набора параметров волнового фронта, которые задают соответствующие кинематические поправки, используемые впоследствии при выравнивании трасс;
составление матрицы, имеющей как минимум три измерения, причем одно из измерений соответствует времени пробега сейсмических волн, а как минимум два других измерения соответствующим образом относятся как минимум к двум параметрам волнового фронта, причем элементы этой матрицы содержат вычисленную меру корреляции;
нахождение с помощью матрицы значений параметров волнового фронта, дающих максимальное значение меры корреляции для, соответственно, каждого из множества времен пробега; и
составление сейсмического изображения подповерхностных структур путем выравнивания и интегрирования трасс с использованием кинематических поправок, заданных найденными величинами параметров волнового фронта.
В одном из раскрытых вариантов реализации получение совокупности трасс включает в себя получение супервыборки трасс, содержащей множество выборок трасс от различных соответствующих источников и приемников, находящихся в двухмерной или трехмерной геометрии системы наблюдений, причем нахождение этих значений включает обработку меры корреляции, вычисленной из множества выборок для того, чтобы найти значения параметров волнового фронта, дающих максимальное значение меры корреляции. Как правило, получение супервыборки включает отбор нескольких выборок, каждая из которых включает соответствующую серию трасс, для которой источники и приемники задают особую геометрию системы наблюдений, причем создание сейсмического изображения подповерхностных структур включает вычисление соответствующих сейсмических изображений в двух или трех измерениях, согласующихся с выборками.
Как правило, кинематические поправки находят с помощью аппроксимации, выбранной из набора аппроксимаций, состоящего из гиперболической, негиперболической и параболической аппроксимации.
В некоторых вариантах реализации как минимум два указанных параметра волнового фронта включают угловой параметр и, по крайней мере, один радиус кривизны волнового фронта, исходящего от подповерхностного отражателя. В одном из вариантов реализации угловой параметр включает в себя угол выхода, причем, по крайней мере, один указанный радиус кривизны включает в себя соответствующие радиусы общего отраженного участка и общего эволютного участка волновых фронтов.
Как правило, нахождение значений предусматривает составление множества многомерных матриц, имеющих как минимум три измерения и содержащих вычисленные значения меры корреляции для соответствующих различных значений радиуса общего эволютного участка, а также сложение этого множества многомерных матриц для составления итоговой многомерной матрицы, как минимум два из указанных измерений которой включают в себя первое измерение, относящееся к углу выхода, и второе измерение, относящееся к радиусу общего отраженного участка. В одном из раскрытых вариантов реализации сложение множества многомерных матриц включает внесение в элементы итоговой многомерной матрицы вычисленных значений меры корреляции, являющихся максимальными среди соответствующих элементов множества многомерных матриц. В дополнение к этому или вместо этого, нахождение значений может включать разделение итоговой многомерной матрицы на слои с получением множества двухмерных матриц и нахождение максимальных значений вычисленной меры корреляции в этих двухмерных матрицах.
В одном из раскрытых вариантов реализации как минимум два из указанных параметров волнового фронта включают угловой параметр и, по крайней мере, один параметр радиуса кривизны фронта волны и параметр скорости.
В некоторых вариантах реализации нахождение значений включает нахождение одного или нескольких максимальных значений вычисленной меры корреляции для каждого из времен пробега, а выравнивание трасс включает в себя выравнивание трасс согласно значениям параметров волнового фронта, соотносящихся с соответствующими максимальными значениями. Нахождение такого или нескольких соответствующих максимальных значений может включать сортировку максимальных значений по значению вычисленной меры корреляции для каждого из максимальных значений. В дополнение к этому или вместо этого, нахождение такого или нескольких соответствующих максимальных значений может включать группировку максимальных значений для каждого из времен пробега, для которых значения параметров волнового фронта различаются не более чем на заранее заданную пороговую величину, как относящихся к одиночной волне, а максимальных значений, для которых значения параметров волнового фронта различаются более чем на заранее заданную пороговую величину, как относящихся к разным волнам, при этом выравнивание трасс включает выравнивание трасс согласно значениям параметров волнового фронта для, по крайней мере, одной из этих разных волн.
В некоторых вариантах реализации нахождение значений включает отображение полученных данных, демонстрирующее вычисленную меру корреляции как функцию времен пробега и, по крайней мере, одного из параметров волнового фронта, а также получение входных данных от пользователя, который идентифицирует одно или несколько максимальных значений вычисленной меры корреляции. Как правило, получение таких входных данных от пользователя включает получение выбранного пользователем коридора, содержащего ряд максимальных значений для разных времен пробега, а также соответствующие значения, по крайней мере, одного из параметров волнового фронта, причем максимальные значения в коридоре соотносятся с волнами, отраженными, соответственно, от последующих подповерхностных слоев.
В другом варианте реализации способ включает определение некоего пространственного горизонта внутри некоторой области сейсмического изображения, и нахождение с помощью матрицы значений параметров волнового фронта, дающих максимальную меру корреляции для, соответственно, каждой из множества точек, расположенных вдоль пространственного горизонта.
Также, согласно одному из вариантов реализации настоящего изобретения, предлагается устройство для обработки данных, содержащее, в том числе:
интерфейс, присоединенный для приема совокупности трасс, соответствующих сигналам, возникшим в результате отражения сейсмических волн от подповерхностных структур и принятых в различных точках в течение некоторого времени; а также
процессор для обработки сигналов, сконфигурированный для вычисления меры корреляции между трассами как функции набора параметров волнового фронта, которые задают соответствующие кинематические поправки, вносимые при выравнивании трасс, для построения матрицы, имеющей как минимум три измерения, причем одно из этих измерений соответствует временам пробега сейсмических волн, и как минимум два измерения соответствуют должным образом как минимум двум из параметров волнового фронта, причем элементы матрицы содержат вычисленную меру корреляции, для нахождения, с помощью матрицы, значений параметров волнового фронта, дающих максимальное значение меры корреляции для, соответственно, каждого из множества времен пробега, для составления сейсмического изображения подповерхностных структур путем выравнивания и интегрирования трасс с использованием кинематических поправок, заданных найденными величинами параметров волнового фронта.
Согласно одному из вариантов реализации настоящего изобретения дополнительно предлагается компьютерный программный продукт, включающий машиночитаемый носитель, на котором хранятся команды программы, которые при считывании их компьютером заставляют компьютер получать совокупности трасс, соответствующих сигналам, возникшим в результате отражения сейсмических волн от подповерхностных структур и принятых на множестве точек в различных точках в течение некоторого времени, вычислить меру корреляции между трассами как функцию набора параметров волнового фронта, которые определяют соответствующие кинематические поправки, вносимые при выравнивании трасс, для составления матрицы, имеющей как минимум три измерения, причем одно из этих измерений соответствует временам пробега сейсмических волн, а как минимум два измерения соответствуют должным образом как минимум двум параметрам волнового фронта, причем элементы матрицы содержат вычисленную меру корреляции, для нахождения с помощью матрицы значений параметров волнового фронта, дающих максимальное значение меры корреляции для, соответственно, каждого из множества времен пробега, а также для составления сейсмического изображения подповерхностных структур путем выравнивания и интегрирования трасс с использованием кинематических поправок, заданных найденными величинами параметров волнового фронта.
Настоящее изобретение станет более понятно из нижеследующего подробного описания вариантов его реализации с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой схематическую иллюстрацию системы построения сейсмических изображений, согласно одному из вариантов реализации настоящего изобретения.
Фиг.2 - 4 представляют собой схематические разрезы подповерхностной области, показывающие параметры, используемые для представления сейсмических волн, проходящих через эту область, согласно одному из вариантов реализации настоящего изобретения.
Фиг.5 представляет собой блок-схему алгоритма способа обработки сейсмических данных, согласно одному из вариантов реализации настоящего изобретения.
Фиг.6 представляет собой схематическую блок-диаграмму структур данных, используемых в рамках способа с фиг.5, согласно одному из вариантов реализации настоящего изобретения.
Фиг.7А представляет собой изображение суммарного сейсмического разреза (суммарный разрез), полученный одним из известных способов нормальной кинематической поправки.
Фиг.7В представляет собой суммарный разрез, полученный способом, основанным на оценке параметров волнового фронта, согласно одному из вариантов реализации настоящего изобретения.
Фиг.8 представляет собой блок-схему алгоритма способа комплексного кинематического анализа сейсмических трасс, согласно одному из вариантов реализации настоящего изобретения.
Фиг.9 представляет собой блок-схему алгоритма способа комплексного кинематического анализа сейсмических трасс, согласно одному из вариантов реализации настоящего изобретения.
Фиг.10 представляет собой схематическое графическое изображение структур данных, используемых в рамках способа с фиг.9, согласно одному из вариантов реализации настоящего изобретения.
Фиг.11 представляет собой схематическое графическое отображение структур данных, используемых в рамках другого способа комплексного кинематического анализа сейсмических трасс, согласно одному из вариантов реализации настоящего изобретения.
РАСКРЫТИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
Фиг.1 представляет собой схематическую иллюстрацию системы 20 для построения сейсмических изображений, согласно одному из вариантов реализации настоящего изобретения. Множество источников 22 и приемников 24 сейсмических сигналов размещены в ряде точек 26 на области 28 земной поверхности, лежащей над исследуемой под поверхностной областью. Как правило, источники 22 содержат заряды взрывчатки, которые подрывают в заданные моменты времени, тогда как приемники 24 содержат сейсмодатчики, генерирующие сейсмотрассы, на которых амплитуда сейсмических волн, дошедших до соответствующих точек 26, обозначена как функция времени. Хотя на фиг.1 для простоты показано, что источники и приемники расположены вдоль одной прямой линии (образуя, таким образом, двухмерную геометрию системы наблюдения), система 20, как правило, содержит ряд источников и приемников, распределенных по некоторой области земной поверхности и, таким образом, может использовать как двухмерную, так и трехмерную геометрию системы наблюдения.
Например, как показано на фиг.1, сейсмическое воздействие (например, взрыв или механический удар) на источнике 22 приводит к возникновению волн с лучевыми траекториями 30, распространяющимися вглубь Земли под поверхностью 28. Эти волны отражаются от подповерхностной структуры 32, например от стыка слоев различных пород. Отраженные волны по лучевым траекториям 34 возвращаются к поверхности 28, где их регистрируют приемники 24. Волны, отраженные от такой структуры, достигают различных датчиков в различные моменты времени в силу того, что под землей они должны преодолеть различные дистанции, а также в силу вариативности формы самой структуры 32 и наличия промежуточных слоев между отражающей структурой и поверхностью 28.
Процессор для обработки сигналов 36 принимает трассы от приемников 24 через предназначенный для этого интерфейс 38. Этот интерфейс может быть сконфигурирован для управления созданием воздействий, а также для приема в реальном времени сигналов с поверхности 28, или же он может получать запись трасс от соответствующей аппаратуры регистрации данных (не показана). Процессор 36 обычно содержит универсальный компьютер с программным обеспечением, сконфигурированным на исполнение описанных ниже функций. Такое программное обеспечение можно загружать в компьютер как электронным способом, например, по сети, так и с материального носителя данных, например оптического, магнитного или электронного запоминающего устройства. Как вариант, по крайней мере, часть функций процессора 36 может быть выполнена подходящим цифровым сигнальным процессором ЦСП (DSP), или другими видами специализированных или программируемых аппаратных устройств обработки данных. Обычно процессор 36 соединен с устройством вывода данных сейсмических данных и изображений, например, таких как дисплей 40. Для взаимодействия с пользователем к процессору 36 можно подключить одно или несколько устройств ввода, например, таких как клавиатура 42 и/или указательное устройство ввода 44.
Для получения сейсмического изображения области, лежащей под поверхностью 28, процессор 36 применяет к супервыборке сейсмограмм от приемников 24 принципы гомеоморфного построения изображений. Супервыборка может содержать совокупность выборок общей точки взрыва (то есть трасс, полученных результате единичного воздействия), выборок общей глубинной площадки (трасс, сгенерированных одним приемником в результате различных воздействий), и/или же сейсмограммы ОГТ (СМР), как описано выше. Принципы и правила, применяемые процессором при создании изображений подповерхностных структур, раскрыты ниже со ссылкой на фиг.2-4.
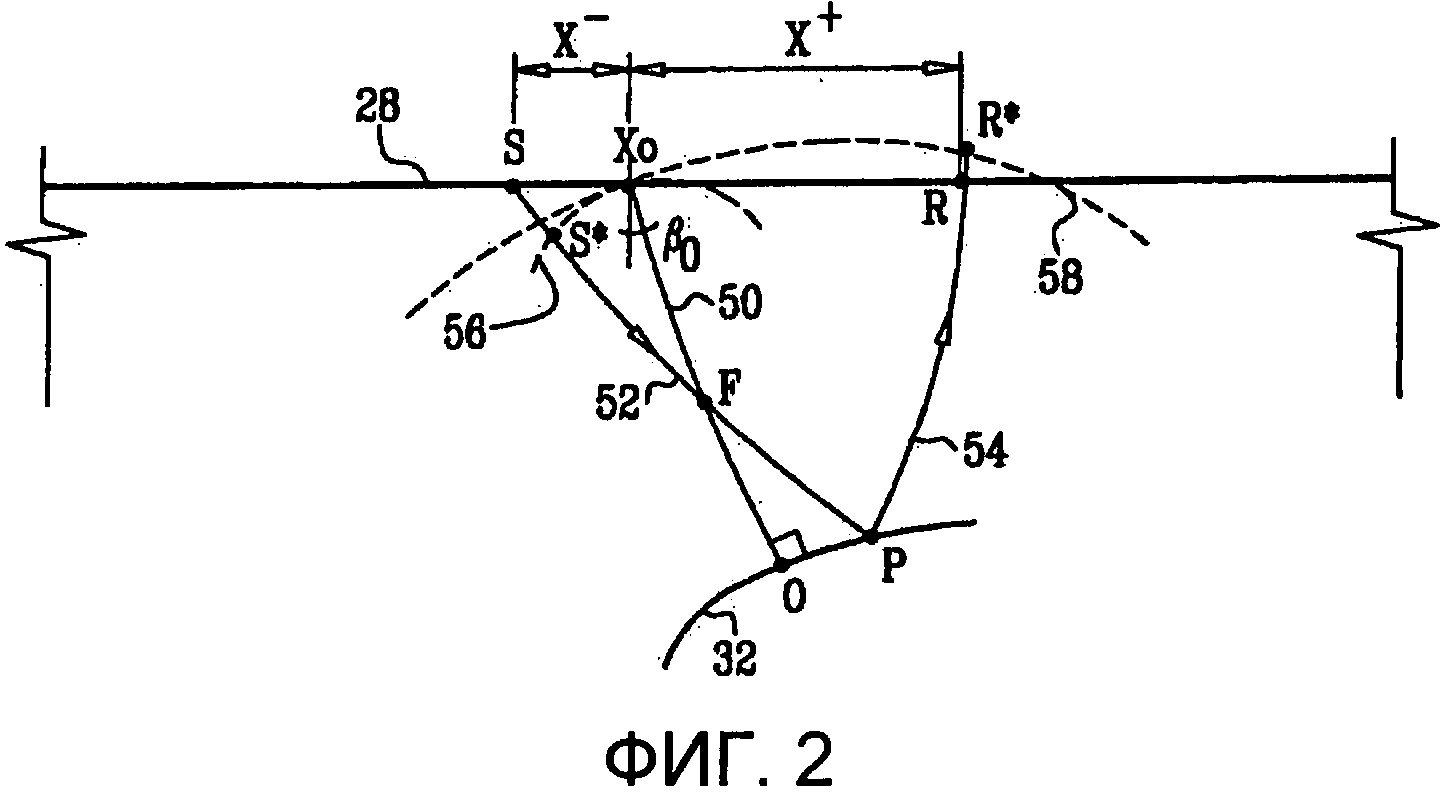
Фиг.2 представляет собой схематический разрез подповерхностной области под поверхностью 28, показывающий прохождение через эту область типичных сейсмических волн, согласно одному из вариантов реализации настоящего изобретения. На данной фигуре показаны некоторые из параметров, используемых при вычислении кинематических поправок в отношении структуры 32 для всех выборок супервыборки с центром в точке Х0. Поправку здесь вычисляют для произвольных положений источника S и приемника R, расположенных на поверхности 28 на расстояниях, соответственно, X- и X+ от точки Х0. Хотя данный вариант реализации (как и все варианты в настоящей заявке) изображается для простоты в двухмерном пространстве X-Z, принципы данных реализации можно без затруднений применить к трехмерному пространству, в котором обычно производят построение сейсмических изображений.
Центральный луч 50 из точки X0 определяют как луч, падающий по нормали на структуру 32 в точке, обозначенной на фигуре как О. Луч 50 исходит от поверхности 28 и возвращается к ней под углом выхода β0 относительно нормали к поверхности. Сейсмический луч 52 из точки S отражается от структуры 32 в точке P и возвращается как отраженный луч 54 в точку R. В данном примере луч 52 пересекается с лучом 50 в точке F. Совокупность лучей 50, 52 и 54 можно, таким образом, смоделировать как сфокусированную волну, которая сходится от волнового фронта 56 к точке F, а затем отражается от структуры 32 и достигает поверхности 28 вдоль фронта 58 расходящейся волны. Волновые фронты 56 и 58 пересекаются с лучами 52 и 54 в точках S* и R* соответственно.
Лучи 52 и 54 представляют собой часть "супервыборки", содержащей множество выборок лучей, которые пересекают луч 50, причем их источники и приемники расположены с обеих сторон от начала центральной точки Х0. Супервыборка такого рода может быть использована, как подробно раскрывается ниже, в технологии, применяемой для поиска значений параметров волнового фронта в окрестностях центрального луча 50. Эта технология определяет действительный и мнимый фокусы волн, отраженных от подповерхностных структур, и поэтому в дальнейшем именуется "многофокусной". В качестве альтернативы, для оценки значений этих параметров волнового фронта можно применять другие способы.
Если считать скорость распространения сейсмических волн во всей исследуемой области одинаковой, то времена пробега сейсмической волны на отрезке луча S*F будут равны времени пробега на отрезке луча FX0, то есть

X0·ОX0:

Время пробега волны от источника 5 до приемника R можно выразить как:

В этом уравнении первый член



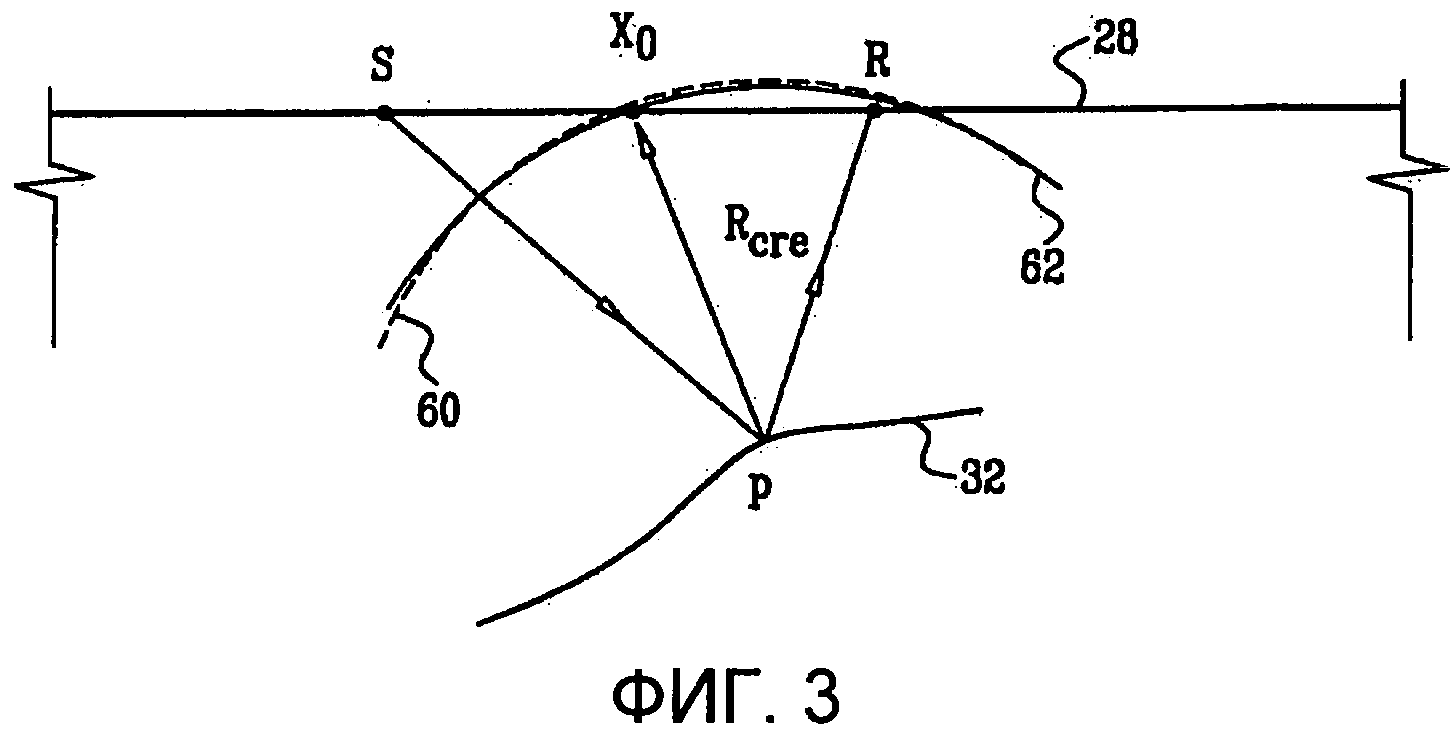
Фиг.3 и фиг.4 представляют собой схематические разрезы подповерхностной области с фиг.2, показывающие параметры волнового фронта, используемые при вычислении локальных кинематических поправок в данной области, согласно одному из вариантов реализации настоящего изобретения. Для вычислений используют гомеоморфную модель, как раскрыто в вышеупомянутом патенте US 5,103,429. В следующих вариантах реализации в число этих параметров входят угол выхода β0, показанный на фиг.2 (который равным образом можно определить и как угол входа); радиус RCRE кривизны волнового фронта с общим участком отражения (ОУО (CRE)), показанный на фиг.3; и радиус RCEE кривизны волнового фронта с общим эволютным участком (ОЭУ (СЕЕ) или нормальная волна), показанный на фиг.4.
Как показано на фиг.2 - фиг.4, параметры β0, RCRE и RCEE относятся непосредственно к физическим характеристикам структуры 32. Как вариант, волновые фронты, используемые в рамках гомеоморфной модели, можно выразить через иные угловые и радиальные параметры, как будет очевидно для специалистов в данной области. Значения параметров волнового фронта не известны априорно, они скорее служат базисом для параметрической модели подповерхностных структур. Значения параметров задают подгонкой фактических данных трасс к этой модели в подробно описанном ниже процессе комплексного кинематического анализа.
Как показано на фиг.3, волна, отражающаяся в точке Р структуры 32, создает волновой фронт 60, достигающий поверхности 28. RCRE есть радиус дуги 62 окружности (или сферы), которая аппроксимирует волновой фронт 60. Этот радиус может быть сопоставлен с обычной эффективной скоростью в подповерхностной области и по формуле

Параметр RCRE на фиг.4 есть радиус дуги 74 окружности (или сферы), который аппроксимирует ОЭУ (СЕЕ) волновой фронт 72, исходящий от отрезка 70 структуры 32 в сторону поверхности 28. ОЭУ (СЕЕ) волновой фронт 72 образован нормальными лучами, исходящими от различных точек отрезка 70 между точками a и b. Результирующий волновой фронт 72 между соответствующими точками A и B определяется, таким образом, формой структуры 32. RCEE моделирует эту форму относительно виртуального центра 0, из которого исходит волна.
Теперь вернемся к уравнению (1). Поправки времени можно выразить следующим образом через геометрические параметры, показанные на фиг.2:



В этих выражениях Rs и Rr есть радиусы волновых фронтов 56 и 58 соответственно, а Vs и Vr - соответствующие приповерхностные сейсмические скорости в окрестностях источника и приемника. Если принять приповерхностную скорость постоянной, то есть Vs=Vr=V0, то уравнения (2) и (3) можно объединить и преобразовать, как показано ниже, используя β0, RCRE и RCEE, для получения кинематической поправки Δt для лучей вокруг центральной точки X0. Приведенные ниже формулы были получены и опубликованы Берковичем в работе «The Multifocusing Method for Homeomorphic Imaging and Stacking of Seismic Data» (докторская диссертация, Университет Тель-Авива, 1995):



Параметр фокусировки σ зависит от положения точки F, в которой луч 52 или 54 пересекается с центральным лучом 50 (см. фиг.2). Этот параметр может быть выражен через радиусы как:

и меняется сравнительно медленно с изменениями β0, RCRE и RCEE. От выбора параметра σ зависит применимое правило сортировки трасс. Например, для случаев X+=0 и X-=0 уравнение (7) дает σ=1 и σ=-1 соответственно. Эти случаи относят к схемам с общим источником и общим приемником. Промежуточные значения σ можно вычислить, решив уравнения (5) и (6).
Переменная Y есть несимметричный масштабный коэффициент, определяемый геометрией наблюдений. Он пропорционален функции распространения (которая пропорциональна X±) и углу отражения волны Δθ: Y≈aX±Δθ, где а - постоянный коэффициент пропорциональности.
Для некоторой заданной выборки трасс вокруг центральной точки X0 значения X+ и X- известны из координат источника и приемника для каждой трассы, тогда как величины β0, RCRE и RCEE зависят от неизвестного местоположения и формы подповерхностных структур, от которых отражаются сейсмические волны.
Корректная комбинация величин β0, RCRE и RCEE будет соответствовать данным по трассам в выборке, в том смысле, что если сдвиги по времени между трассами скорректированы согласно этим величинам, трассы будут иметь высокую степень когерентности (то есть высокое значение взаимной корреляции), поскольку отражения от структуры 32 будут выровнены во времени и, таким образом, хорошо скоррелированы. Процессор 36 производит поиск на интервалах комбинаций β0, RCRE и RCEE с Х0, X+ и X- по всей супервыборке с применением процесса, именуемого здесь комплексным кинематическим анализом, для нахождения комбинаций, дающих наилучшее приближение для всех трасс. Результирующая карта β0, RCRE и RCEE характеризует местоположение и форму структуры 32, а также других структур в исследуемой подповерхностной области. Этот процесс подробно раскрыт ниже.
Хотя приведенный выше вариант многофокусной модели и раскрытые ниже способы относятся непосредственно к ОГТ (СМР) выборкам вокруг центральной точки Х0, эти способы можно сходным образом применять, с необходимыми изменениями, и к выборкам иных типов. Например, уравнение (4) и связанные с ним определения параметров можно переформулировать для выборок трасс с общей точкой взрыва или с общей глубинной площадкой.
Подразумевается, что такие альтернативные подходы не выходят за рамки настоящего изобретения.
Раскрытый выше многофокусный способ создает взаимно однозначное соответствие между параметрами волнового фронта и свойствами подповерхностных отражателей. Как вариант, можно использовать иные аппроксимирующие выражения и формулы для вычисления таких параметров для построения оптимального суммарного разреза. Некоторые из этих альтернативных способов можно рассматривать как особый случай раскрытого в настоящей заявке способа.
Например, Чира-Олива (Chira-Oliva) и другие предложили следующую формулу для вычисления кинематических поправок в работе «2-D ZO CR5 Stack by Considering an Acquisition Line with Smooth Topography» в журнале Revista Brasileira de Geofisica 23:1 (2005), страницы 1-18:

Здесь t - время пробега отраженной волны, t0 - время смещения нуля,

Другая формула для кинематических поправок предложена Хартвеком (Hertweck) и другими в публикации «Data Stacking Beyond CMP», The Leading Edge 26:7 (2007), страницы 818-827:

При замене переменных в уравнении (9) как


Теперь обратимся к фиг.5 и фиг.6, на которых схематически показан способ обработки сейсмических данных, согласно одному из вариантов реализации настоящего изобретения. Фиг.5 представляет собой блок-схему алгоритма, на которой показаны ключевые стадии способа, а фиг.6 представляет собой схематическую блок-диаграмму структур данных, используемых в рамках способа с фиг.5. Этот способ применяют при обработке двухмерных (2D) сейсмических данных, то есть данных, собранных посредством источников и приемников, расположенных вдоль одной линии. На практике, для построения трехмерной карты подповерхностных слоев, таким образом обрабатывают множество аналогичных двухмерных срезов, полученных на различных линиях. Как вариант, описанный ниже способ можно адаптировать для полностью трехмерного сейсмического исследования и обработки данных за счет добавления других параметров волнового фронта, в том числе поперечных углов и радиусов в трех направлениях. В этом случае описанные ниже трехмерные матрицы с фиг.6 будут заменены многомерными матрицами, имеющими более трех измерений.
В рамках способа с фиг.5 и фиг.6, на этапе 80 накопления данных, собирают множество сейсмических трасс. Трассы можно собирать, например, с использованием такого программного обеспечения системы, как показано на фиг.1, или с помощью любых других подходящих средств сбора сейсмических данных. Трассы образуют супервыборку 82, как описано выше.
Для анализа данных на этапе 84 определения ОЭУ (СЕЕ) задают интервалы возможных значений радиуса RCEE. Формально,



Таким образом, для каждой тройки значений



Внутри каждого куба точки (β0, RCRE, t0) с высокими значениями степени когерентности можно соотнести с действительными точками структуры 32 и других подземных слоев, от которых отразились сейсмические волны. Другие точки с высокой когерентностью, однако, могут соответствовать артефактам, обусловленным, например, многократными отражениями от различных слоев. Для корректного отображения подповерхностных слоев нужно выбрать и сгруппировать правильные точки с высокой степенью когерентности, а артефакты отбросить.
Чтобы облегчить выбор правильных точек в кубах 88, на этапе 90 консолидации по когерентности процессор 36 находит значения пары (β0, RCRE), дающие максимальные степени когерентности для каждого значения t0 по всем значениям RCEE. Таким образом, процессор анализирует значения S(β0, RCRE, t0) на интервале



Процессор 36 рассекает куб на двухмерные матрицы 96, 98 и 100 на этапе 94 рассечения. Эти матрицы определены следующим образом:
- Матрицу 96,


- Матрицу 100,


- Матрицы 98,

На этапе 102 кинематического анализа матрицы 96, 98 и 100 используют в процессе комплексного кинематического анализа для отыскания наборов максимумов когерентности, отвечающих действительным отражениям от подповерхностных структур. Этот этап может исполняться процессором 36 либо автоматически, либо интерактивно с участием пользователя системы 20. Автоматические и интерактивные способы, которые могут быть применены на этапе 102, раскрываются ниже со ссылкой на фиг.8 и фиг.9. Используя найденные на этапе 102 максимумы, процессор 36 выравнивает и интегрирует трассы в супервыборке для того, чтобы получить законченное двухмерное или трехмерное изображение структур в исследуемой подповерхностной области. Это изображение, как правило, отражает поведение слоев под каждой из центральных точек на поверхности 28. Конкретные технологии для получения таких изображений на основе результатов анализа волнового фронта более подробно раскрыты в уже упоминавшейся докторской диссертации Берковича (Berkovitch).
Теперь обратимся к фиг.7А и фиг.7В, представляющим собой суммарные сейсмические разрезы, то есть сечения трехмерной подповерхностной среды, полученные на основе некоторого набора сейсмотрасс, собранного с применением системы наподобие показанной на фиг.1. На фиг.7А показан суммарный разрез, полученный известным способом ввода кинематических поправок и суммирования. На фиг.7В показан суммарный разрез, полученный путем вычисления гомеоморфных параметров и комплексного кинематического анализа, согласно одному из вариантов реализации настоящего изобретения. На фиг.7В структуры видны значительно подробнее, чем на фиг.7А. Процессор 36 достигает такого превосходного результата за счет обработки всей супервыборки, поскольку, как объяснялось выше, он использует более точный негиперболический ввод кинематических поправок, применяя параметры, связанные с направлением падения волнового фронта, скоростью в подповерхностной среде и кривизной отражателей.
Фиг.8 представляет собой блок-схему автоматического способа комплексного кинематического анализа, который можно применять на этапе 102, согласно одному из вариантов реализации настоящего изобретения. Этот способ осуществляют с использованием двухмерных матриц 98,








После идентификации различных максимумов процессор 36 сортирует максимальные величины когерентности по убыванию на этапе 114 сортировки. Наибольшие степени когерентности относятся к волне с наибольшей корреляцией. Значение тройки (β0, RCRE, RCEE) при этом максимуме определяет соответствующую кинематическую поправку Δτ для каждой трассы в супервыборке, согласно приведенному выше уравнению (4). На этапе 116 выравнивания процессор выравнивает трассы вокруг соответствующей центральной точки X0 согласно значениям этих поправок. Сумма выровненных трасс дает амплитуду центральной трассы для соответствующего отрезка времени t0i. Аналогично, процессор может выравнивать и суммировать трассы, используя значения поправок, выявленные по другим максимумам, для всех максимумов выше некоторого порога и/или до некоего заданного числа максимумов в порядке убывания. Процессор повторяет вышеописанную процедуру для всех значений t0i и всех центральных точек Х0 для построения законченного суммарного разреза.
Теперь обратимся к фиг.9 и фиг.10, представляющим собой схематические графические изображения интерактивного способа комплексного кинематического анализа, который можно применять на этапе 102 согласно другому варианту реализации настоящего изобретения. Фиг.9 представляет собой блок-схему алгоритма способа, а фиг.10 - схематическое графическое изображение структур данных, используемых при применении этого способа. Для инициализации данного способа, на этапе вычисления матриц, процессор 36 вычисляет матрицы S1, S2 и S3 (обозначенные на фиг.10 как, соответственно, матрицы 96, 100 и 98) для некоторого выбранного набора базовых центральных точек. Задействованные в процедуре базовые центральные точки могут быть либо выбраны пользователем, либо автоматически определены процессором и, как правило, совпадают с координатами центральных точек, используемыми в традиционном процессе. Результирующие матрицы для некоторой данной центральной точки Х0 показаны в виде полутонового изображения на фиг.10, причем степень когерентности в каждой точке данной матрицы представлена соответствующей яркостью изображения. Горизонтальные пунктирные линии на фигуре отвечают некоторому выбранному значению t0, которое представляет собой значение t0i, используемое для матрицы 98. Вертикальные пунктирные линии на матрицах 96 и 100 отвечают местоположениям RCRE и βm для одного из максимумов (светлая зона).
Для удобства понимания, на этапе 122 пересчета матриц, можно выразить матрицу 96 через скорость, например эффективной скоростью. Для этого матрицу S1 когерентности пересчитывают как S1(Vst,t0) по, например, приведенной выше формуле

На этапе 124 выбора скорости пользователь выбирает максимумы когерентности в матрице S1. Обычно процессор 36 выводит на дисплей 40 графические данные, соответствующие изображению матрицы 96, как показано на фиг.10. Затем пользователь может посредством клавиатуры 42 и/или указательного устройства ввода 44 ввести данные, идентифицирующие "коридоры" максимумов на дисплее, например, таких как изогнутый столбец из диагональных светлых зон в матрице 96, видимый на фиг.10. Эти коридоры соответствуют последовательностям оптимальных величин Vst (или, эквивалентно, RCRE) для соответствующих значений t0. Пользователь без труда опознает и выделит единообразный строй последовательности максимумов в подобном коридоре. Единообразие последовательности максимумов является хорошим индикатором того, что максимумы отвечают действительным отражениям от последовательности приблизительно параллельных подземных слоев, а не артефактам. Как отмечено выше, пользователь опознает подобные коридоры на некоторых базовых точках, после чего процессор может способом интерполяции выявить соответствующие коридоры на прочих центральных точках.
Чтобы обеспечить выбор оптимальных RCRE для каждого значения t0, на этапе 128 выбора радиуса, процессор 36 может задействовать соответствующую матрицу 98

Аналогично пользователь может опознать наилучшие значения β0 для соответствующих значений t0 и


Процессор 36 вычисляет соответствующие величины кинематических поправок исходя из выбранных значений β0 и RCRE для каждого t0i, после чего, используя эти кинематические поправки, на этапе 134 выравнивает трассы вокруг соответствующей центральной точки Х0. Проведение этого этапа аналогично описанному выше этапу 116, и подобным образом этот этап повторяется для всех значений t0i и всех центральных точек Х0 для построения законченного суммарного разреза.
Фиг.11 представляет собой схематическое графическое отображение структур данных, используемых в рамках другого способа комплексного кинематического анализа сейсмических трасс, согласно одному из вариантов реализации настоящего изобретения. В противоположность раскрытым выше способам анализа, которые относятся к кинематическому анализу параметров (β, RCRE, RCEE etc.) волнового фронта по оси времени (t0), на фиг.11 показан анализ сейсмографических данных вдоль пространственного горизонта 140. Такой горизонт можно выбирать (автоматически или с участием пользователя системы 20) так, чтобы он соответствовал некой отражающей подповерхностной структуре. Для значений координаты X вдоль горизонта 140 процессор 36 строит куб 88, а затем извлекает матрицы 142 и 144 значений степени когерентности для того, чтобы найти максимумы RCRE (или скорости) и, соответственно, β. Эти максимумы затем используют для выделения волн, отраженных от данного горизонта.
Хотя в раскрытых здесь фигурах и способах используются конкретные приемы комплексного кинематического анализа для опознания, выделения, сортировки и использования максимумов функции когерентности, аналогичным образом для этих целей к сейсмическим данным можно применить и другие автоматические и интерактивные приемы кинематического анализа, причем оставаясь в рамках настоящего изобретения.
Например, для поиска максимумов можно применить другие функции когерентности, такие как функции корреляции или критерий Стьюдента. Таким образом, в заявке и формуле настоящего изобретения ссылки на "меру корреляции" следует считать относящимися как к степени когерентности, так и ко всем другим сходным функциям корреляции и когерентности. Кроме того, при вычислении вышеописанных параметров можно использовать иные аппроксимации формул (2)-(7). Помимо этого вышеописанные технологии можно применять и к минимальным супервыборкам, содержащим только одну ОГТ (СМР)-выборку, или только одну выборку общей точки взрыва, или только одну выборку общей глубинной площадки.
Более того, хотя варианты реализации, раскрытые выше, относятся непосредственно к обработке сейсмических данных и построению изображений подповерхностных структур, принципы настоящего изобретения можно сходным образом применять при построении изображений негомогенных сред иного рода, например, в томографии или иных способах неразрушающего наблюдения. Определенные выше параметры, используемые при обработке сейсмических данных, можно также применять в сейсмотомографии, в рамках способа Острандера (AVO, амплитуда как функция удаления), для статической коррекции (коррекция влияния приповерхностных областей), и так далее.
Таким образом, подразумевается, что описанные выше варианты реализации приведены только для примера, в то время как настоящее изобретение не ограничивается непосредственно раскрытым в данном тексте и фигурах. Напротив, в рамки настоящего изобретения входят как комбинации и подкомбинации различных описанных выше признаков, так и вариации и модификации этих комбинаций, которые являлись бы очевидными для специалистов в данной области, но которые не раскрыты в известном уровне техники.
Реферат
Изобретение относится к области геофизики и может быть использовано при сейсморазведке. Заявлен способ компьютерной обработки данных, включающий прием совокупности трасс, соответствующих сигналам, возникшим в результате отражения сейсмических волн от подповерхностных структур и принятых в различных точках в течение некоторого времени. Мера корреляции между трассами вычисляется как функция набора параметров волнового фронта, которые задают соответствующие кинематические поправки, используемые впоследствии при выравнивании трасс. Составляют матрицу, имеющую как минимум три измерения, причем элементы этой матрицы содержат вычисленную меру корреляции. С помощью матрицы значения параметров волнового фронта находят автоматически или интерактивно вдоль оси времени или вдоль выбранных горизонтов для получения максимального значения меры корреляции, причем сейсмическое изображение подповерхностных структур строят путем выравнивания и интегрирования трасс с использованием кинематических поправок, заданных найденными величинами параметров волнового фронта. Технический результат: повышение точности результатов зондирования. 2 н. и 6 з.п. ф-лы, 11 ил.
Формула
группу источников и приемников сейсмических сигналов, размещенных на области земной поверхности и управляемых таким образом, чтобы вызвать распространение под земной поверхностью сейсмических волн и генерирование на приемниках супервыборки трасс, соответствующих сигналам, возникшим в результате отражения указанных сейсмических волн от подповерхностных структур и принятым в различных точках в течение некоторого времени; а также процессор для обработки сигналов, сконфигурированный для вычисления меры корреляции между трассами как функции набора параметров волнового фронта, которые задают соответствующие кинематические поправки, вносимые при выравнивании трасс, для составления матрицы, имеющей как минимум три измерения, причем одно из этих измерений соответствует временам пробега сейсмических волн и как минимум два измерения соответствуют должным образом как минимум двум из параметров волнового фронта, причем элементы матрицы содержат вычисленную меру корреляции для нахождения с помощью матрицы значений параметров волнового фронта, дающих максимальное значение меры корреляции для соответственно каждого из множества времен пробега и для составления сейсмического изображения подповерхностных структур путем выравнивания и интегрирования трасс с использованием кинематических поправок, заданных найденными величинами параметров волнового фронта.
размещение группы источников и приемников сейсмических сигналов на области земной поверхности;
управление указанными источниками сейсмических сигналов так, чтобы вызвать распространение под земной поверхностью сейсмических волн и сгенерировать на приемниках супервыборку трасс, соответствующих сигналам, возникшим в результате отражения указанных сейсмических волн от подповерхностных структур и принятых в различных точках в течение некоторого времени;
вычисление меры корреляции между трассами как функции набора параметров волнового фронта, которые задают соответствующие кинематические поправки, используемые впоследствии при выравнивании трасс;
составление матрицы, имеющей как минимум три измерения, причем одно из этих измерений соответствует времени пробега сейсмических волн, а как минимум два других измерения соответствующим образом относятся как минимум к двум параметрам волнового фронта, причем элементы этой матрицы содержат вычисленную меру корреляции;
нахождение с помощью матрицы значений параметров волнового фронта, дающих максимальное значение меры корреляции для каждого соответствующего из множества времен пробега;
составление сейсмического изображения подповерхностных структур путем выравнивания и интегрирования трасс с использованием кинематических поправок, заданных найденными величинами параметров волнового фронта.
Комментарии